The Design and Optimization of a Compressive-Type Vector Sensor Utilizing a PMN-28PT Piezoelectric Single-Crystal

 , ,
, ,  and
and
Abstract
:1. Introduction
2. FEA Model of the Vector Sensor
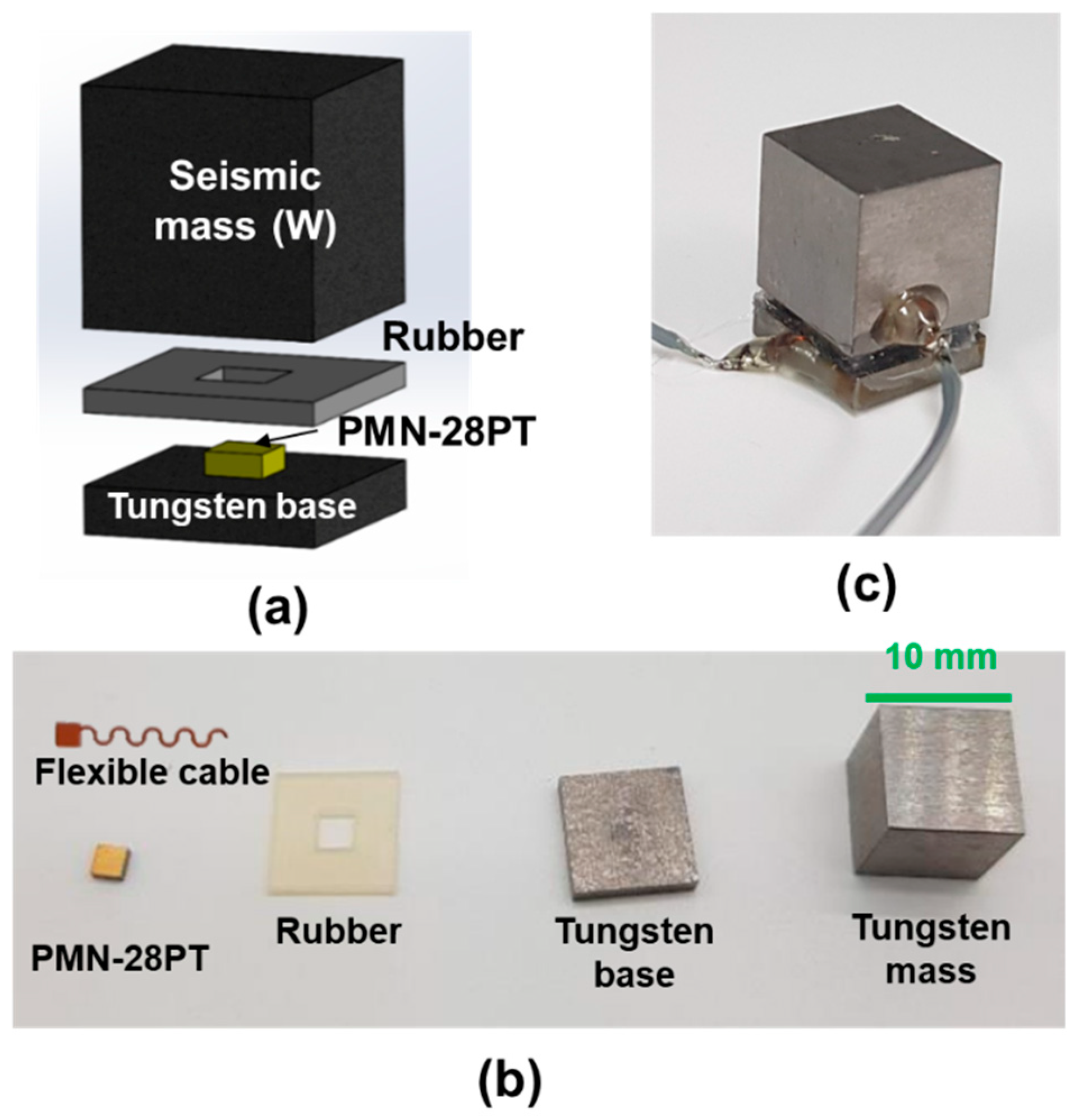
2.1. Accelerometer Design
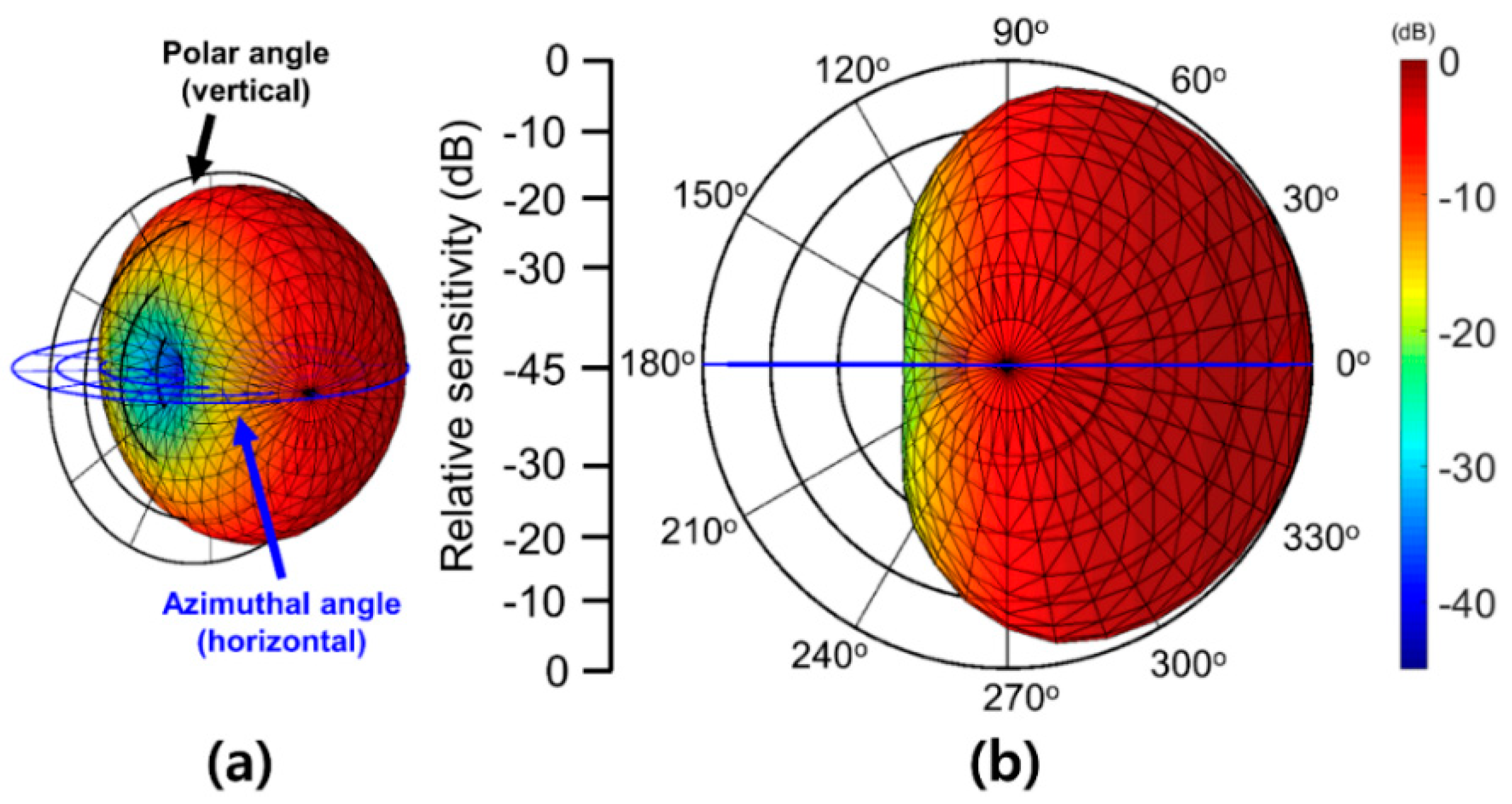
2.2. Vector Hydrophone
3. Sensor Fabrication and Experiment Results
3.1. Fabrication and Characterization of Vector Sensor
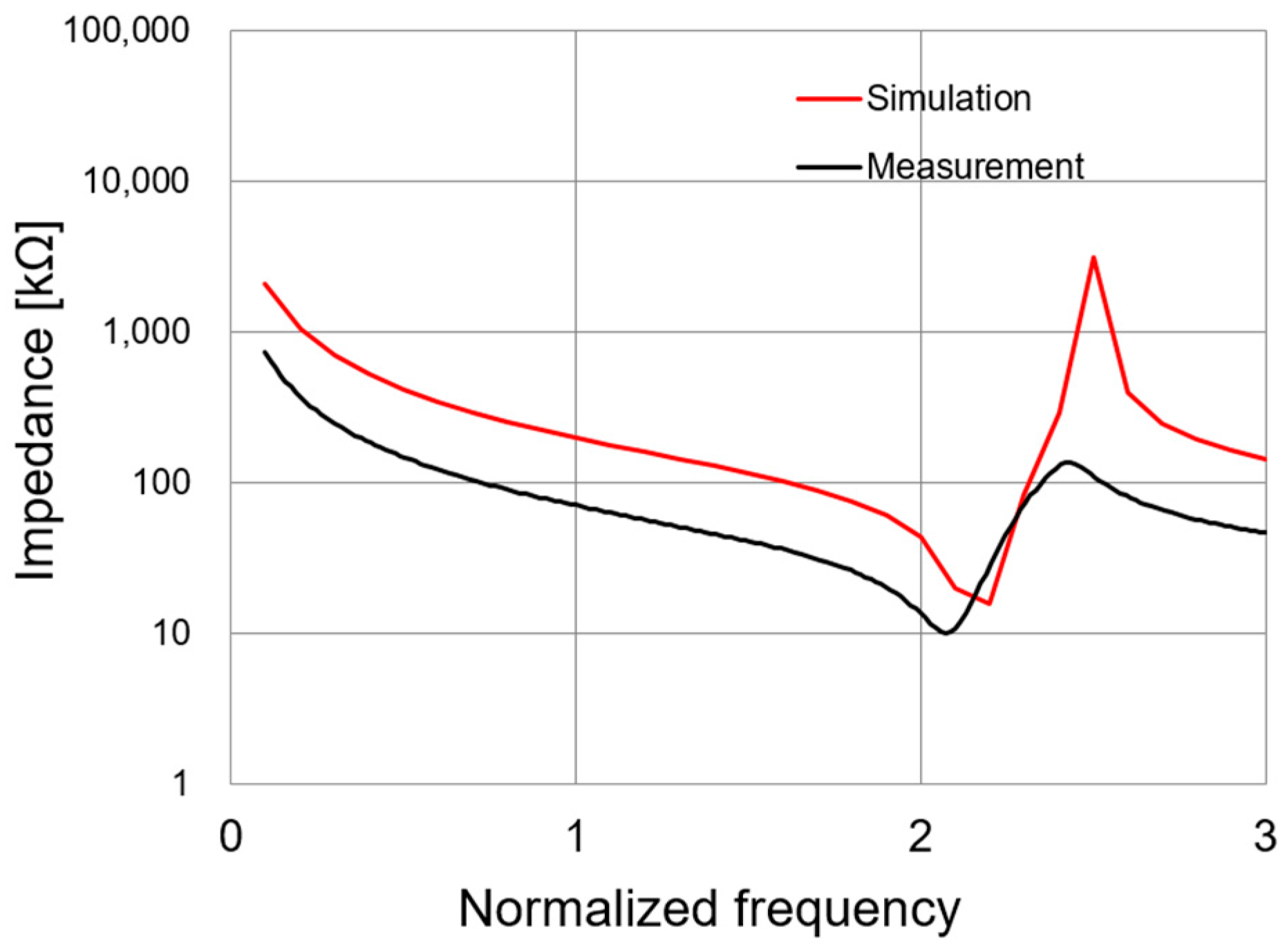
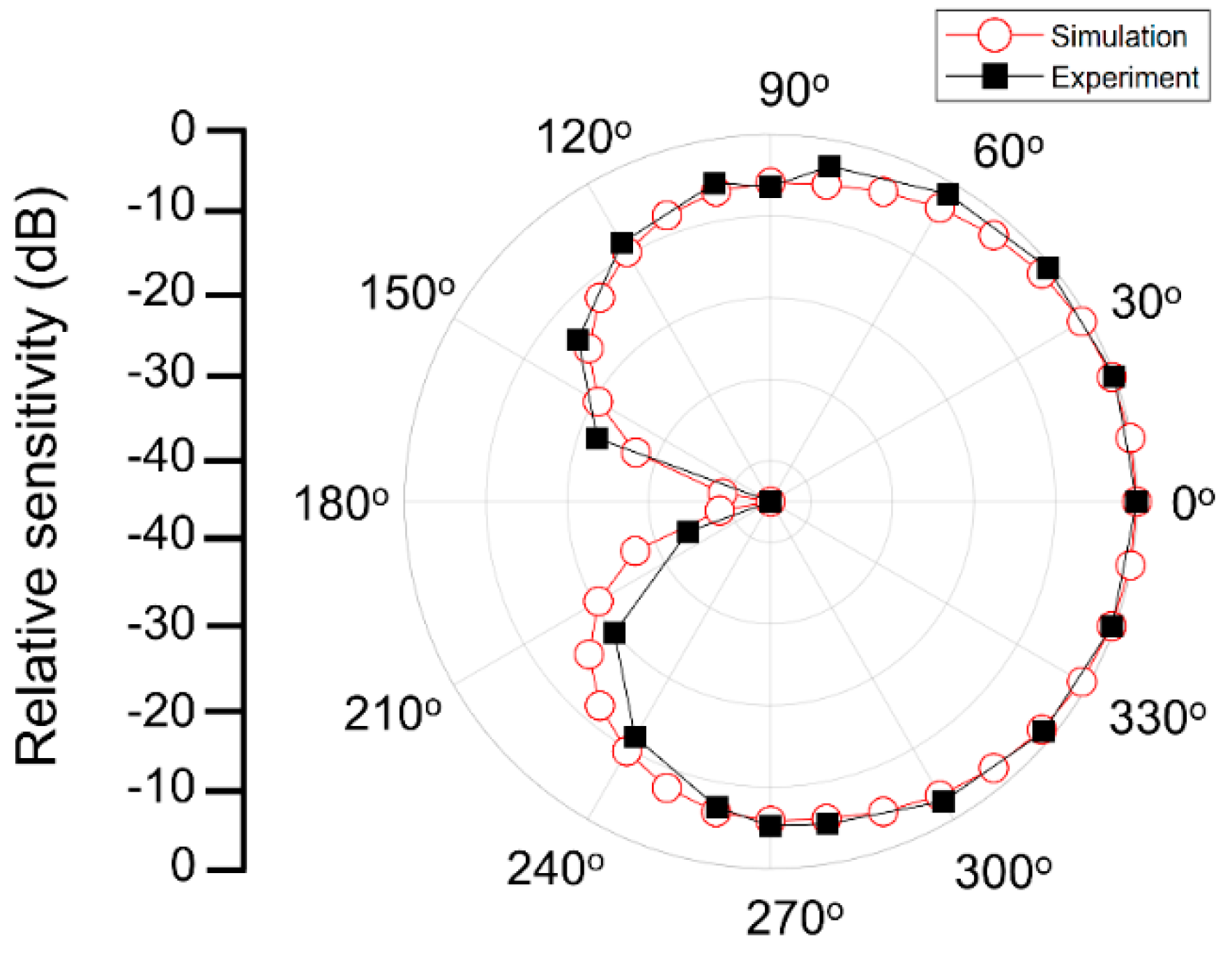
3.2. Characterization of the Prototype Vector Sensor
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lu, F.; Milios, E.; Stergiopoulos, S.; Dhanantwari, A. New towed-array shape-estimation scheme for real-time sonar systems. IEEE J. Ocean. Eng. 2003, 28, 552–563. [Google Scholar] [CrossRef]
- Heidemann, J.; Li, Y.; Syed, A.; Wills, J.; Ye, W. Research challenges and applications for underwater sensor networking. In Proceedings of the IEEE Wireless Communications and Networking Conference 2006, Las Vegas, NV, USA, 3–6 April 2006. [Google Scholar]
- Gabrielson, T.B.; Gardner, D.L.; Garrett, S.L. A simple neutrally buoyant sensor for direct measurement of particle velocity and intensity in water. J. Acoust. Soc. Am. 1995, 97, 2227–2237. [Google Scholar] [CrossRef]
- Bastyr, K.J.; Lauchle, G.C. Development of a velocity gradient underwater acoustic intensity sensor. J. Acoust. Soc. Am. 1993, 106, 3178–3188. [Google Scholar] [CrossRef]
- Sherman, C.H.; Butler, J.L. Transducers and Arrays for Underwater Sound, 1st ed.; Springer: New York, NY, USA, 2007; ISBN 978-0387-32940-6. [Google Scholar]
- Schau, H.C.; Robinson, A.Z. Passive source localization employing intersecting spherical surfaces from time-of-arrival differences. IEEE Trans. Acoust. Speech Sig. Process. 1987, 35, 1223–1225. [Google Scholar] [CrossRef]
- Silvia, M.T.; Richards, R.T. A theoretical and experimental investigation of low-frequency acoustic vector sensor. In Proceedings of the Oceans 2002, Biloxi, MI, USA, 29–31 October 2002. [Google Scholar]
- Lim, Y.; Joh, C.; Seo, H.; Kim, J.; Roh, Y. Design and fabrication of a multimode ring vector hydrophone. Jpn. J. Appl. Phys. 2014, 53, 7S. [Google Scholar] [CrossRef]
- Kalgan, A.; Bahl, R.; Kumar, A. Studies on underwater acoustic vector sensor for passive estimation of direction of arrival of radiating acoustic signal. Indian. J. Geo-Mar. Sci. 2015, 44, 213–219. [Google Scholar]
- Spain, G.L.D.; Hodgkiss, W.S.; Edmonds, G.L. The simultaneous measurement of infrasonic acoustic particle velocity and acoustic pressure in the ocean by freely drifting Swallow floats. IEEE J. Ocean. Eng. 1991, 16, 195–207. [Google Scholar] [CrossRef]
- Abdi, A.; Guo, H.; Sutthiwan, A. new vector sensor receiver for underwater acoustic communication. In Proceedings of the Oceans 2007, Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar]
- Felisberto, P.; Santos, P.; Jesus, S.M. Tracking source azimuth using a single vector sensor. In Proceedings of the 2010 Fourth International Conference on Sensor Technologies and Applications, Venice, Mestre, Italy, 18–25 July 2010. [Google Scholar]
- Shipps, J.C.; Deng, K. A miniature vector sensor for line array applications. In Proceedings of the Oceans 2003, San Diego, CA, USA, 22–26 September 2003. [Google Scholar]
- Beranek, L.L.; Mellow, T. Acoustics: Sound Fields and Transducers, 1st ed.; Academic Press: Oxford, UK, 2012; ISBN 978-0-12-391421-7. [Google Scholar]
- Pyo, S.; Kim, J.; Kim, H.; Roh, Y. Development of vector hydrophone using thickness-shear mode piezoelectric single crystal accelerometer. Sens. Actuators A 2018, 283, 220–227. [Google Scholar] [CrossRef]
- Butler, J.L.; Sherman, C.H. Transducers and Arrays for Underwater Sound, 2nd ed.; Springer: New York, NY, USA, 2016; ISBN 978-3-319-39042-0. [Google Scholar]
- McConnell, J.A.; Jensen, S.C.; Rudzinsky, J.P. Forming first- and second-order cardioids with multimode hydrophones. In Proceedings of the Oceans 2006, Boston, MA, USA, 18–21 September 2006. [Google Scholar]
- Agarwal, A.; Kumar, A.; Aggarwal, M.; Bahl, R. Design and experimentation with acoustic vector sensors. In Proceedings of the 2009 International Symposium on Ocean Electronics (SYMPOL 2009), Cochin, India, 18–20 November 2009. [Google Scholar]
- Kim, K.; Gabrielson, T.B.; Lauchle, G.C. Development of an accelerometer-based underwater acoustic intensity sensor. J. Acoust. Soc. Am. 2004, 116, 3384–3392. [Google Scholar] [CrossRef] [PubMed]
- Angleton, P.A.; Hayer, J.R. Ceramic transducer elements and accelerometers utilizing same. US Patent 3487238A, 30 December 1969. [Google Scholar]
- Tims, A.C.; Davidson, R.L.; Timme, R.W. High sensitivity piezoelectric accelerometer. Rev. Sci. Instrum. 1975, 46, 554–558. [Google Scholar] [CrossRef]
- Kim, J.; Joh, C.; Roh, Y. Evaluation of all the Material Constants of PMN-28%PT Piezoelectric Single Crystals for Acoustic Transducers. Sens. Mater. 2013, 25, 539–552. [Google Scholar]
- Lurton, X. An Introduction to Underwater Acoustics, 2nd ed.; Springer: Chichester, UK, 2002; ISBN 3-540-42967-0. [Google Scholar]
- Efunda Piezo Data: PZT-4D. Available online: https://www.efunda.com (accessed on 13 October 2019).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Elastic Compliance Constants (S) [10−12 m2/N] | 41.4 | Piezoelectric Strain Constants (d) [10−12 C/N] | d31 | −549 | |
| −22 | d33 | 1282 | |||
| −19.4 | d15 | 169 | |||
| 47.5 | Dielectric Constants (ε) | 1821 | |||
| 15.1 | 4841 | ||||
| 24.9 | Density (ρ) [kg/m3] | ρ | 8000 |
| Young’s Modulus [GPa] | Density [kg/m3] |
|---|---|
| 360 | 17,800 |
| Material | PMN-28PT | Tungsten | ||
|---|---|---|---|---|
| Parameter | ws | ts | wm | tm |
| Dimension [mm] | 2.5–5 | 0.1–1 | 5–10 | 1–10 |
| Elastic Compliance Constants (S) [10−12 m2/N] | 13.3 | Piezoelectric Strain Constants (d) [10−12 C/N] | d31 | −135 | |
| −4.76 | d33 | 315 | |||
| −6.2 | d15 | 550 | |||
| 16.8 | Dielectric Constants (ε) | 1610 | |||
| 42 | 1450 | ||||
| 36.1 | Density (ρ) [kg/m3] | ρ | 7600 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yeo, H.G.; Choi, J.; Jin, C.; Pyo, S.; Roh, Y.; Choi, H. The Design and Optimization of a Compressive-Type Vector Sensor Utilizing a PMN-28PT Piezoelectric Single-Crystal. Sensors 2019, 19, 5155. https://doi.org/10.3390/s19235155
Yeo HG, Choi J, Jin C, Pyo S, Roh Y, Choi H. The Design and Optimization of a Compressive-Type Vector Sensor Utilizing a PMN-28PT Piezoelectric Single-Crystal. Sensors. 2019; 19(23):5155. https://doi.org/10.3390/s19235155
Chicago/Turabian StyleYeo, Hong Goo, Junhee Choi, Changzhu Jin, Seonghun Pyo, Yongrae Roh, and Hongsoo Choi. 2019. "The Design and Optimization of a Compressive-Type Vector Sensor Utilizing a PMN-28PT Piezoelectric Single-Crystal" Sensors 19, no. 23: 5155. https://doi.org/10.3390/s19235155
APA StyleYeo, H. G., Choi, J., Jin, C., Pyo, S., Roh, Y., & Choi, H. (2019). The Design and Optimization of a Compressive-Type Vector Sensor Utilizing a PMN-28PT Piezoelectric Single-Crystal. Sensors, 19(23), 5155. https://doi.org/10.3390/s19235155