A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction

Abstract
1. Introduction
2. Materials and Methods
2.1. Basic Theory
2.1.1. Empirical Mode Decomposition
2.1.2. Quantifying the Noise in the Gyroscope Sensor through Fractal Gaussian Noise
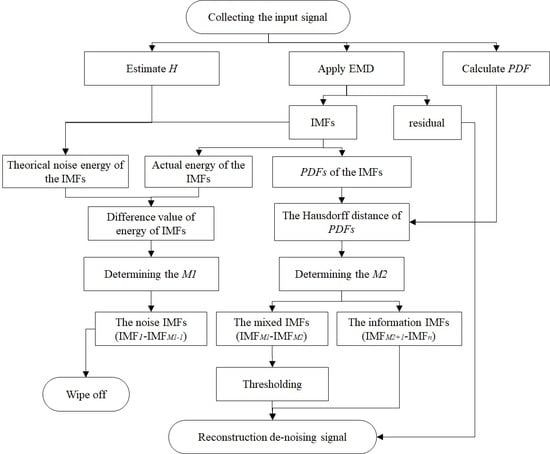
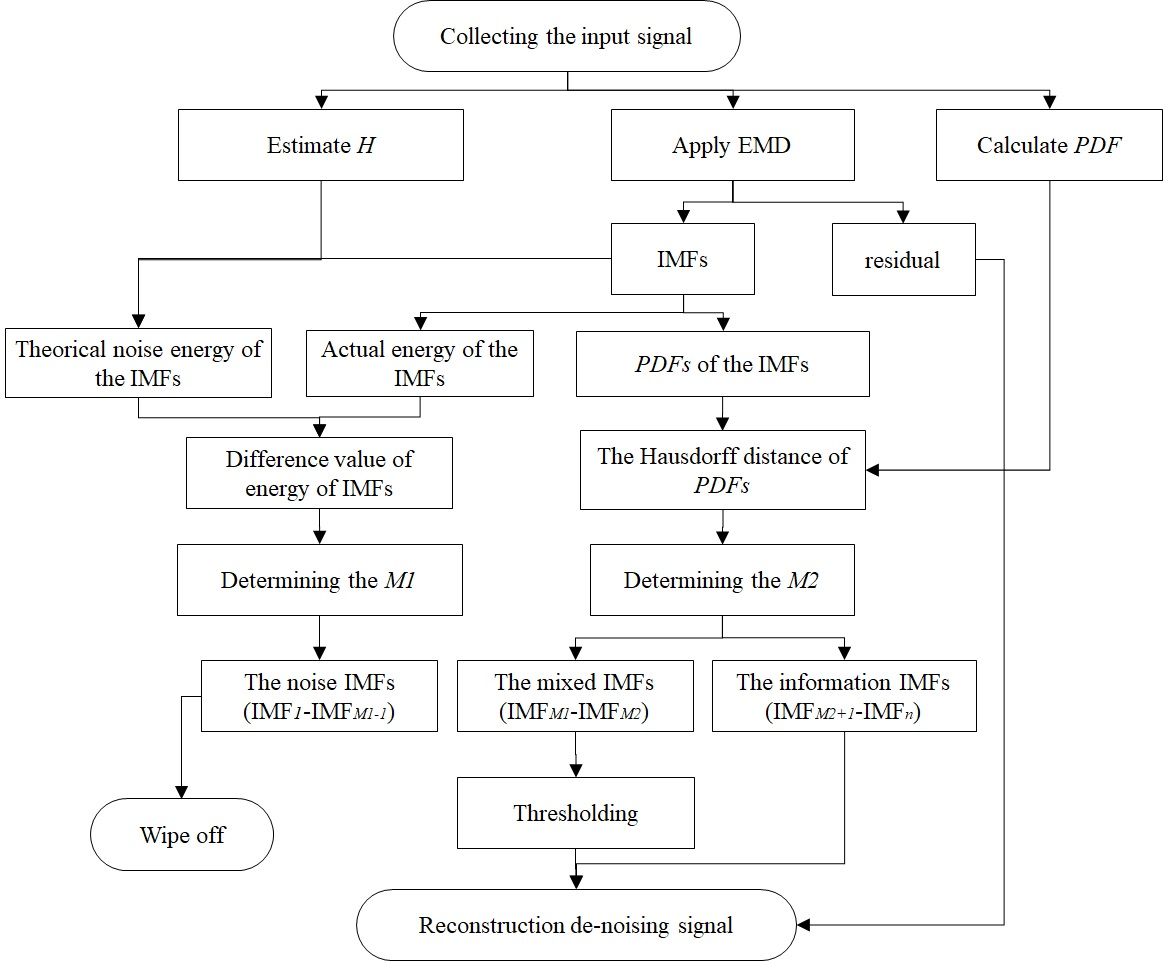
2.2. Proposed Denoising Method
- Estimate the value of the Hurst parameter (H) and quantify the noise through FGN;
- Implement the EMD algorithm to obtain the IMFs and residual;
- Determine the pure noise IMFs by comparing the significant difference between the actual and theoretical energy values;
- Determine the mixed IMFs using an improved Hausdorff distance (HD) method;
- Threshold the mixed IMFs via a hard interval threshold;
- Reconstruct the optimal signal.
2.2.1. Determining the Value of and
2.2.2. Thresholding for Mixed IMFs
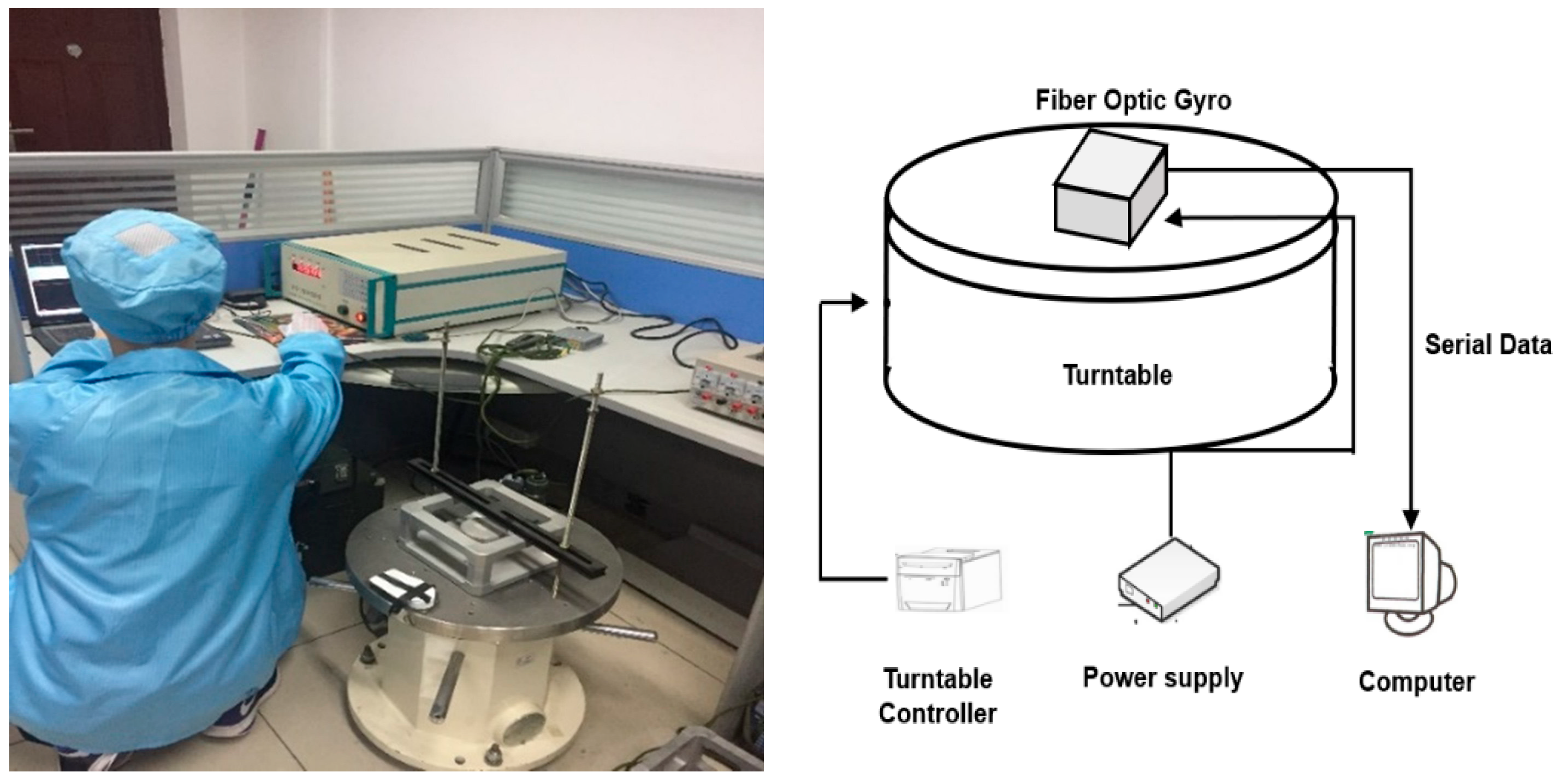
2.3. Experimental Design
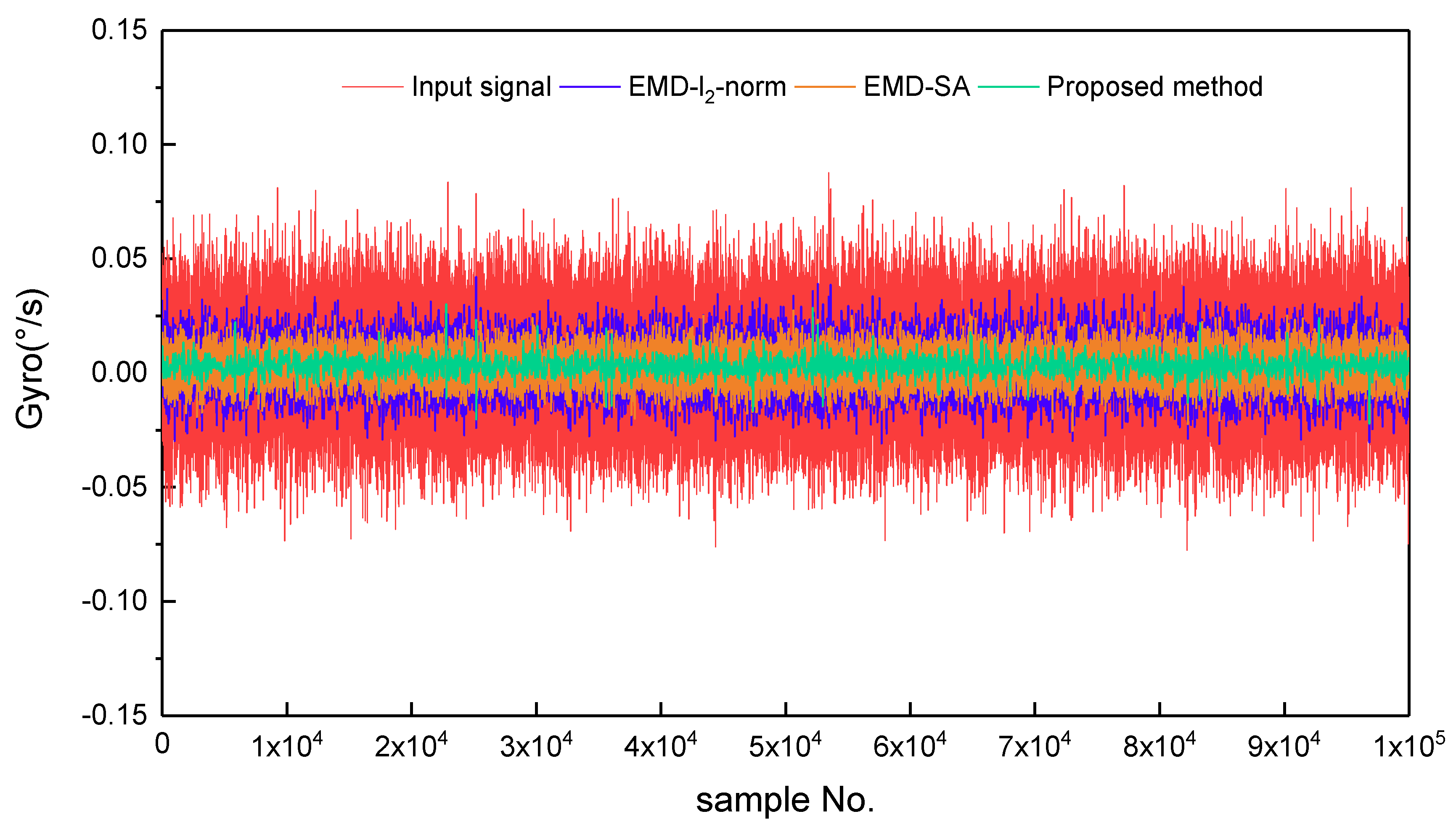
3. Results and Discussions
3.1. Static Test Signal
3.2. Dynamic Test Signal
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Dell’Olio, F.; Tatoli, T.; Ciminelli, C.; Armenise, M.N. Recent advances in miniaturized optical gyroscopes. J. Eur. Opt. Soc. 2014, 9, 1–14. [Google Scholar] [CrossRef]
- Wu, B.; Yu, Y.; Xiong, J.; Zhang, X. Silicon Integrated Interferometric Optical Gyroscope. Sci. Rep. 2018, 8, 1–7. [Google Scholar] [CrossRef] [PubMed]
- Cui, B.; Chen, X. Improved hybrid filter for fiber optic gyroscope signal denoising based on EMD and forward linear prediction. Sensor. Actuat. A.-Phys. 2015, 230, 150–155. [Google Scholar] [CrossRef]
- Ciminelli, C.; Dell’Olio, F.; Campanella, C.E.; Armenise, M.N. Photonic technologies for angular velocity sensing. Adv. Opt. Photonics 2010, 2, 370–404. [Google Scholar] [CrossRef]
- Woodman, O.J. An introduction to inertial navigation; Technical Report Number 696; University of Cambridge, Computer Laboratory: Cambridge, UK, 2007. [Google Scholar]
- Yang, X.H.; Ren, J.X.; Zhao, X.M.; Chen, R. MEMS Gyro Signal De-noising Based on Adaptive Stationary Wavelet Threshold. Adv. Mat. Res. 2012, 466–467, 986–990. [Google Scholar] [CrossRef]
- Zhang, F. Modeling Study on Random Error of Fiber Optic Gyro. Appl. Mech. Mater. 2013, 239–240, 167–171. [Google Scholar] [CrossRef]
- Ma, J.; Yang, Z.; Shi, Z.; Zhang, X.; Liu, C. Application and Optimization of Wavelet Transform Filter for North-Seeking Gyroscope Sensor Exposed to Vibration. Sensors 2019, 19, 3624. [Google Scholar] [CrossRef]
- Yang, G.; Liu, Y.; Wang, Y.; Zhu, Z. EMD interval thresholding denoising based on similarity measure to select relevant modes. Signal Process. 2015, 109, 95–109. [Google Scholar] [CrossRef]
- Gan, Y.; Sui, L.; Wu, J.; Wang, B.; Zhang, Q.; Xiao, G. An EMD threshold de-noising method for inertial sensors. Measurement 2014, 49, 34–41. [Google Scholar] [CrossRef]
- Antoniadis, A.; Bigot, J.; Sapatinas, T. Wavelet Estimators in Nonparametric Regression: A Comparative Simulation Study. J. Stat. Softw. 2001, 6, 1–83. [Google Scholar] [CrossRef]
- Cai, T.T.; Silverman, B.W. Incorporating Information on Neighbouring Coefficients into Wavelet Estimation. Sankhyā Indian J. Stat. Ser. B 2001, 63, 127–148. [Google Scholar]
- Bessous, N.; Zouzou, S.E.; Bentrah, W.; Sbaa, S.; Sahraoui, M. Diagnosis of bearing defects in induction motors using discrete wavelet transform. Int. J. Syst. Assur. Eng. Manag. 2018, 9, 335–343. [Google Scholar] [CrossRef]
- Donoho, D.L.; Johnstone, I.M.; Kerkyacharian, G.; Picard, D. Density estimation by wavelet thresholding. Ann. Stat. 1996, 24, 508–539. [Google Scholar] [CrossRef]
- Luo, H.Z.; Lin, X.Y.; Liu, L. Research on GPS/SINS Integrated Navigation System Based on Wavelet Transform. In Proceedings of the 7th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2011), Wuhan, China, 23–25 Septembar 2011; pp. 1–4. [Google Scholar]
- Yan, R.; Gao, R.X.; Chen, X. Wavelets for fault diagnosis of rotary machines: A review with applications. Signal Process. 2014, 96, 1–15. [Google Scholar] [CrossRef]
- Davari, N.; Gholami, A.; Shabani, M. Performance Enhancement of GPS/INS Integrated Navigation System Using Wavelet Based De-noising method. AUT J. Electr. Eng. 2016, 48, 101–111. [Google Scholar]
- Zeng, K.; Huang, J.; Dong, M. White Gaussian Noise Energy Estimation and Wavelet Multi-threshold De-noising for Heart Sound Signals. Circ. Syst. Signal Pr. 2014, 33, 2987–3002. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. London A Math. Phys. Eng. sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Yu, D.; Cheng, J.; Yang, Y. Application of EMD method and Hilbert spectrum to the fault diagnosis of roller bearings. Mech. Syst. Signal Pr. 2005, 19, 259–270. [Google Scholar] [CrossRef]
- Guangfen, W.; Wen, A.; Fajin, G.; Zhenan, T.; Jun, Y. The Hilbert-Huang Transform and Its Application in Processing Dynamic Signals of Gas Sensors. In Proceedings of the 2009 International Conference on Information Engineering and Computer Science, Wuhan, China, 19–20 December 2009; pp. 1–4. [Google Scholar]
- Jun, H.; Zhang, Q.; Sun, G.; Yang, J.C.; Xiong, J. A Vibration Signal Analysis Method based on Enforced De-Noising and Modified EMD. I. J. Signal Process. Image Process. Pattern Recognit. 2015, 8, 87–98. [Google Scholar] [CrossRef]
- Deng, H.; Liu, J.; Li, H. EMD Based Infrared Image Target Detection Method. J. Infrared Millim. Te. 2009, 30, 1205–1215. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, J.; Liu, Z. EMD based multi-scale model for high resolution image fusion. GeoSpat. Inf. Sci. 2008, 11, 31–37. [Google Scholar] [CrossRef]
- Rakshit, M.; Das, S. An efficient ECG denoising methodology using empirical mode decomposition and adaptive switching mean filter. Biomed. Signal Process. Control 2018, 40, 140–148. [Google Scholar] [CrossRef]
- Dang, S.; Tian, W.; Qian, F. EMD- and LWT-based stochastic noise eliminating method for fiber optic gyro. Measurement 2011, 44, 2190–2193. [Google Scholar] [CrossRef]
- Flandrin, P.; Rilling, G.; Goncalves, P. Empirical Mode Decomposition as a Filter Bank. IEEE Signal Process. Lett. 2004, 11, 112–114. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. A study of the characteristics of white noise using the empirical mode decomposition method. Proc. R. Soc. London A Math. Phys. Eng. Sci. 2004, 460, 1597–1611. [Google Scholar] [CrossRef]
- Flandrin, P.; Goncalves, P.; Rilling, G. EMD Equivalent Filter Banks, from Interpretation to Applications. In Hilbert-Huang Transform and Its Applications; World Scientific: Singapore, 2004; pp. 57–74. [Google Scholar] [CrossRef]
- Ayenu-Prah, A.Y.; Attoh-Okine, N.O. A criterion for selecting relevant intrinsic mode functions in empirical mode decomposition. Adv.Adapt. Data Anal. 2010, 2, 1–24. [Google Scholar] [CrossRef]
- Tang, Y.W.; Tai, C.C.; Su, C.C.; Chen, C.Y.; Chen, J.F. A correlated empirical mode decomposition method for partial discharge signal denoising. Meas. Sci. Technol. 2010, 21, 085106. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.O.; Augier, B.; Dare-Emzivat, D. EMD-Based Filtering Using Similarity Measure Between Probability Density Functions of IMFs. IEEE T. Instrum. Meas. 2014, 63, 27–34. [Google Scholar] [CrossRef]
- Darong, H.; Lanyan, K.; Bo, M.; Ling, Z.; Guoxi, S. A New Incipient Fault Diagnosis Method Combining Improved RLS and LMD Algorithm for Rolling Bearings with Strong Background Noise. IEEE Access 2018, 6, 26001–26010. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, S.B. A Novel Adaptively-Robust Strategy Based on the Mahalanobis Distance for GPS/INS Integrated Navigation Systems. Sensors 2018, 18, 695. [Google Scholar] [CrossRef]
- Boudraa, A.O.; Cexus, J.C. Denoising via empirical mode decomposition. Proc. IEEE ISCCSP 2006, 2006, 4. [Google Scholar]
- Mandelbrot, B.B.; Van Ness, V.J. Fractional Brownian Motions, Fractional Noises and Applications. SIAM Rev. 1968, 10, 422–437. [Google Scholar] [CrossRef]
- Mandelbrot, B.B.; Wallis, J.R. Computer Experiments with Fractional Gaussian Noises: Part 1, Mathematical Appendix. Water Resour. Res. 1969, 5, 260–267. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. Empirical Mode Decomposition, fractional Gaussian noise and Hurst exponent estimation. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, USA, 23–23 March 2005; pp. 489–492. [Google Scholar]
- Huttenlocher, D.P.; Klanderman, G.A.; Rucklidge, W.J. Comparing Images Using the Hausdorff Distance. IEEE Trans. Pettern Anal. Mach. Intell 1993, 15, 850–863. [Google Scholar] [CrossRef]
- Komaty, A.; Boudraa, A.O.; Dare, D. EMD-based filtering using the Hausdorff distance. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Ho Chi Minh City, Vietnam, 12–15 December 2012; pp. 292–297. [Google Scholar]
- Kopsinis, Y.; McLaughlin, S. Empirical mode decomposition based soft-thresholding. In Proceedings of the 16th European Signal Processing Conference, Lausanne, Switzerland, 25–29 August 2008. [Google Scholar]
- Xi, X.; Zhang, Y.; Zhao, Y.; She, Q.; Luo, Z. Denoising of surface electromyogram based on complementary ensemble empirical mode decomposition and improved interval thresholding. Rev. Sci. Instrum. 2019, 90, 035003. [Google Scholar] [CrossRef] [PubMed]
- Prosvirin, A.E.; Islam, M.; Kim, J.; Kim, J.M. Rub-Impact Fault Diagnosis Using an Effective IMF Selection Technique in Ensemble Empirical Mode Decomposition and Hybrid Feature Models. Sensors 2018, 18, 2040. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Bias Drift (°/s) | Angle Random Walking (°/) | Quantization Noise (°) | RMSE (°/s) |
|---|---|---|---|---|
| 1 | 0.0308 | 0.0526 | 0.5130 | 0.0309 |
| 2 | 0.0075 | 0.0374 | 0.4820 | 0.0079 |
| 3 | 0.0059 | 0.0273 | 0.3404 | 0.0063 |
| 4 | 0.0038 | 0.0191 | 0.1622 | 0.0045 |
| Rotational Speed | Indicator | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 |
|---|---|---|---|---|---|
| 10 °/s (H = 0.2472) | RMSE | 0.0951 | 0.0933 | 0.0927 | 0.0892 |
| STD | 0.0537 | 0.0505 | 0.0493 | 0.0177 | |
| 20 °/s (H = 0.3277) | RMSE | 0.1686 | 0.1676 | 0.1672 | 0.1580 |
| STD | 0.0685 | 0.0660 | 0.0645 | 0.0276 | |
| 30 °/s (H = 0.3137) | RMSE | 0.2396 | 0.2389 | 0.2386 | 0.2321 |
| STD | 0.0686 | 0.0662 | 0.0652 | 0.0392 | |
| 40 °/s (H = 0.2472) | RMSE | 0.3144 | 0.3138 | 0.3136 | 0.3069 |
| STD | 0.0763 | 0.0741 | 0.0731 | 0.0450 | |
| 50 °/s (H = 0.3310) | RMSE | 0.3901 | 0.3897 | 0.3896 | 0.3809 |
| STD | 0.0860 | 0.0840 | 0.0832 | 0.0500 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Yang, Z.; Shi, Z.; Ma, J.; Cao, J. A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction. Sensors 2019, 19, 5064. https://doi.org/10.3390/s19235064
Liu C, Yang Z, Shi Z, Ma J, Cao J. A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction. Sensors. 2019; 19(23):5064. https://doi.org/10.3390/s19235064
Chicago/Turabian StyleLiu, Chenchen, Zhiqiang Yang, Zhen Shi, Ji Ma, and Jian Cao. 2019. "A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction" Sensors 19, no. 23: 5064. https://doi.org/10.3390/s19235064
APA StyleLiu, C., Yang, Z., Shi, Z., Ma, J., & Cao, J. (2019). A Gyroscope Signal Denoising Method Based on Empirical Mode Decomposition and Signal Reconstruction. Sensors, 19(23), 5064. https://doi.org/10.3390/s19235064