Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive



Abstract
:1. Introduction
2. Estimation Algorithm of the Induction Motor Currents
2.1. Mathematical Model of the Induction Motor
- -
- the stator windings and the rotor cage are replaced by a concentric winding;
- -
- three-phase motor symmetry and uniformity of the air gap are assumed;
- -
- the phenomena of hysteresis, magnetic saturation, eddy currents, and anisotropy are ignored; and
- -
- the constant resistances and winding inductance are assumed,
- -
- voltage equation of the stator winding:
- -
- voltage equation of the rotor winding:
- -
- flux–current equations:
- -
- expression for electromagnetic torque:
- -
- equation of motion:
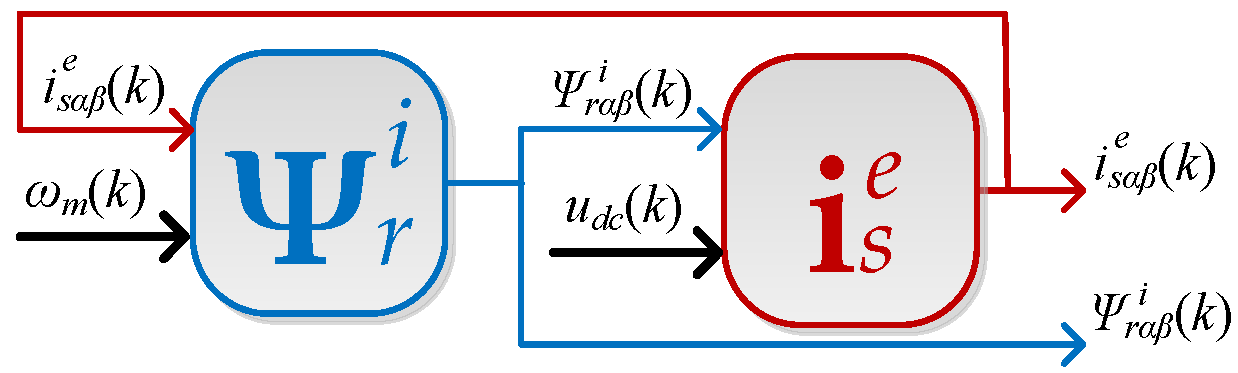
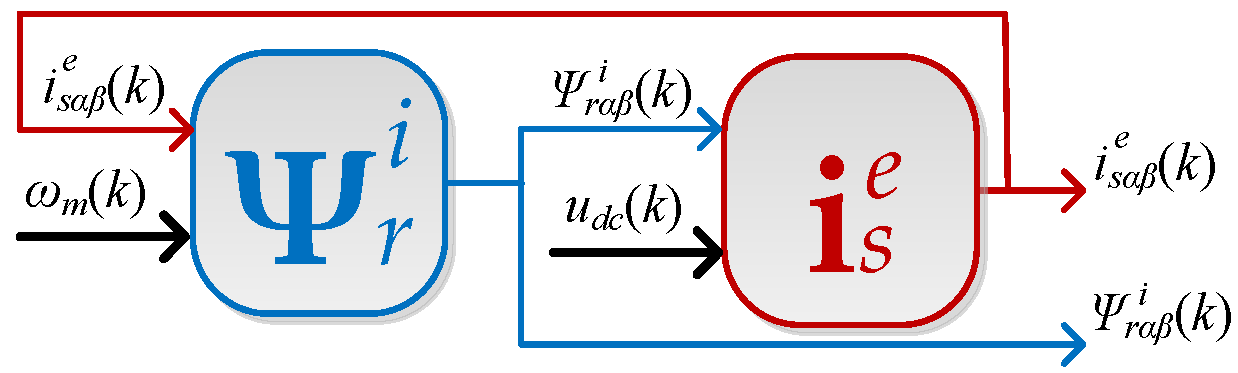
2.2. Stator Current Estimation Algorithm
3. Simulation Study
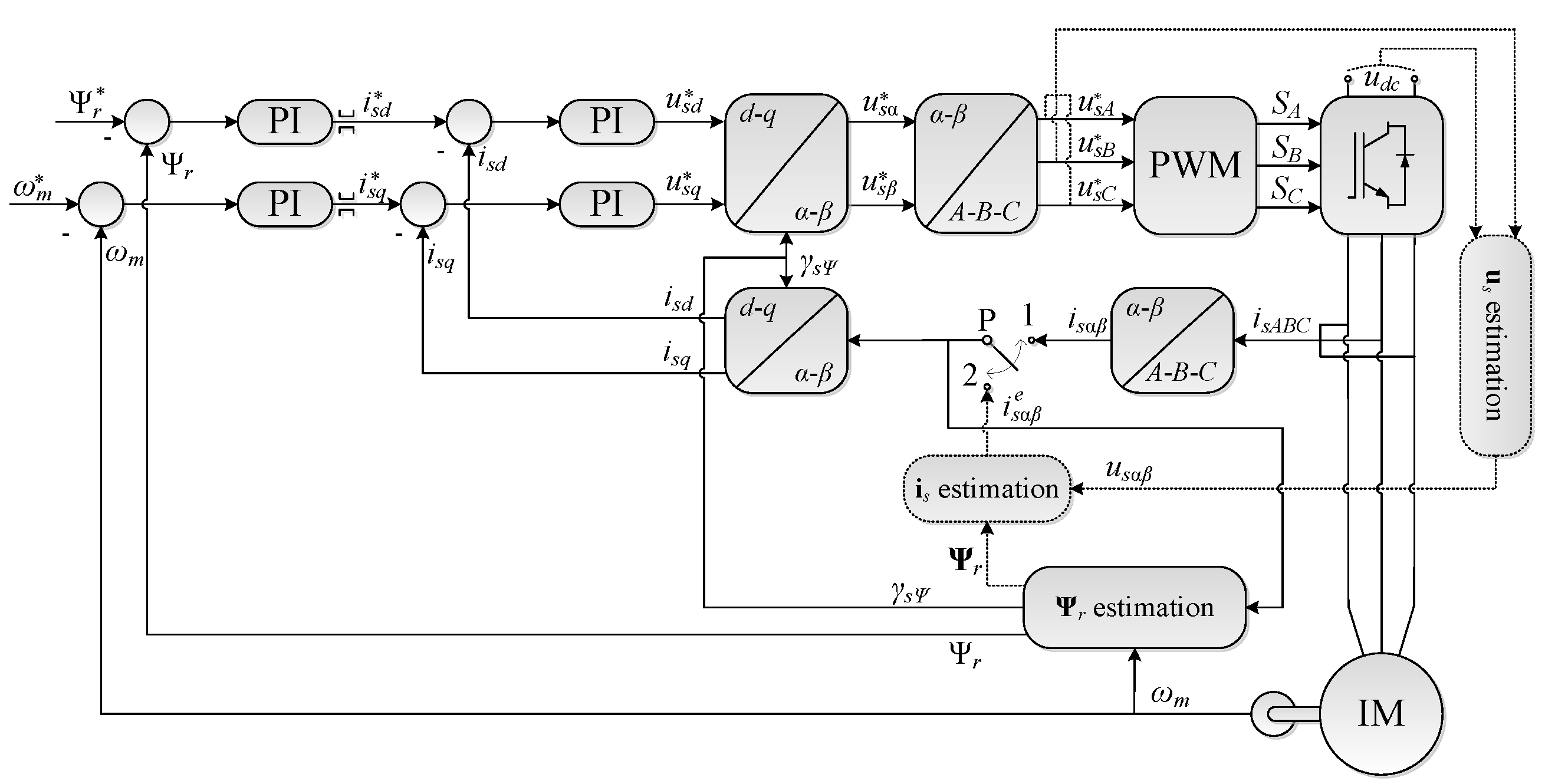
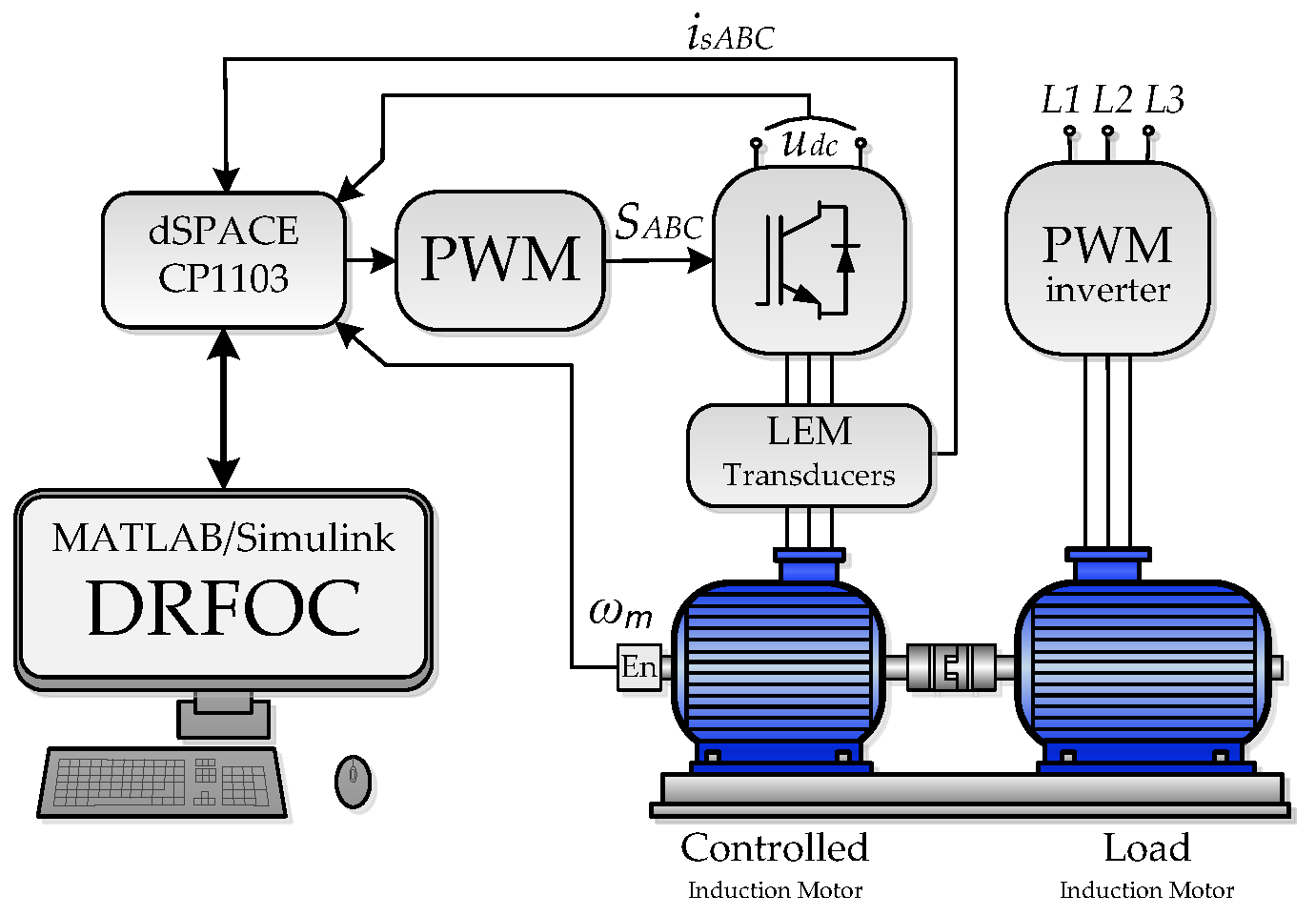
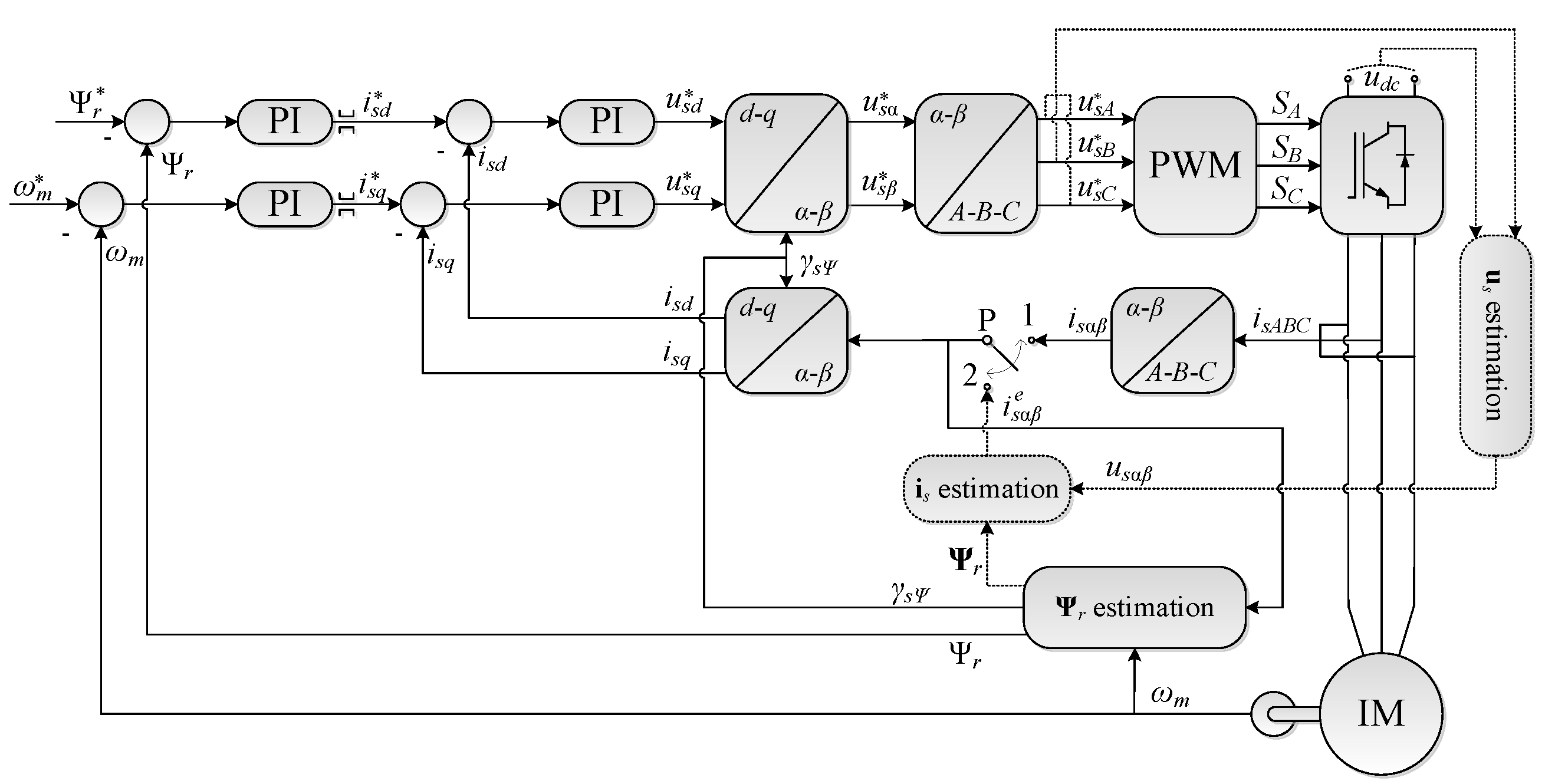
3.1. Description of the Tested Structure and Test Scenarios
- -
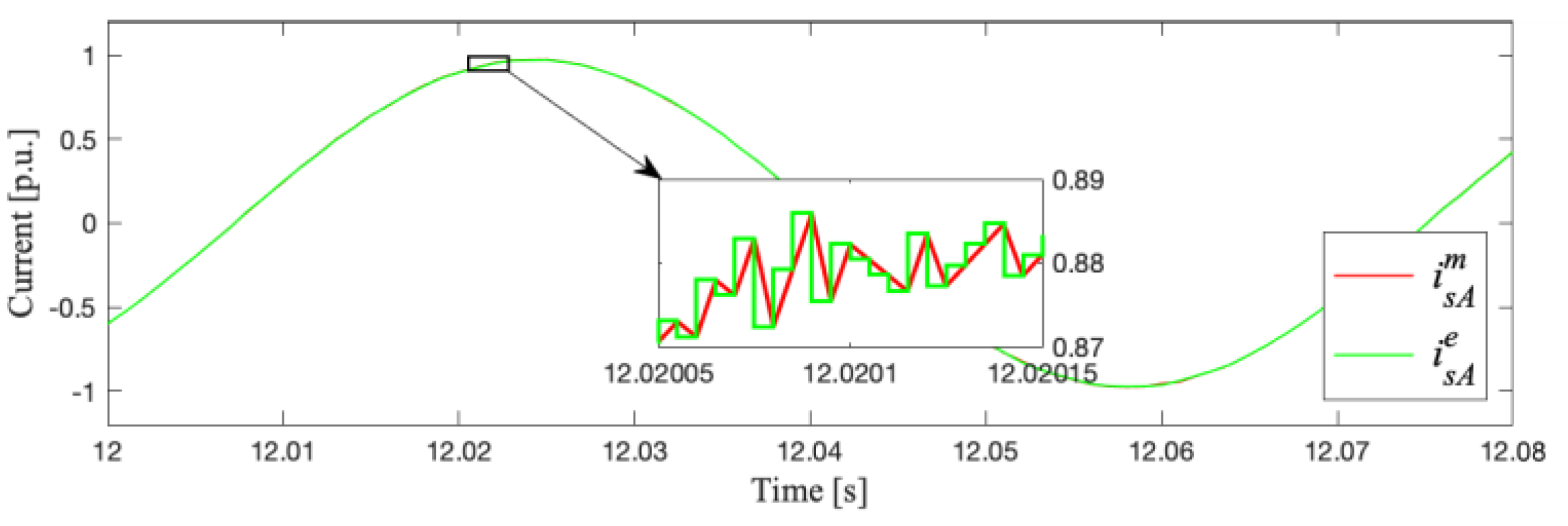
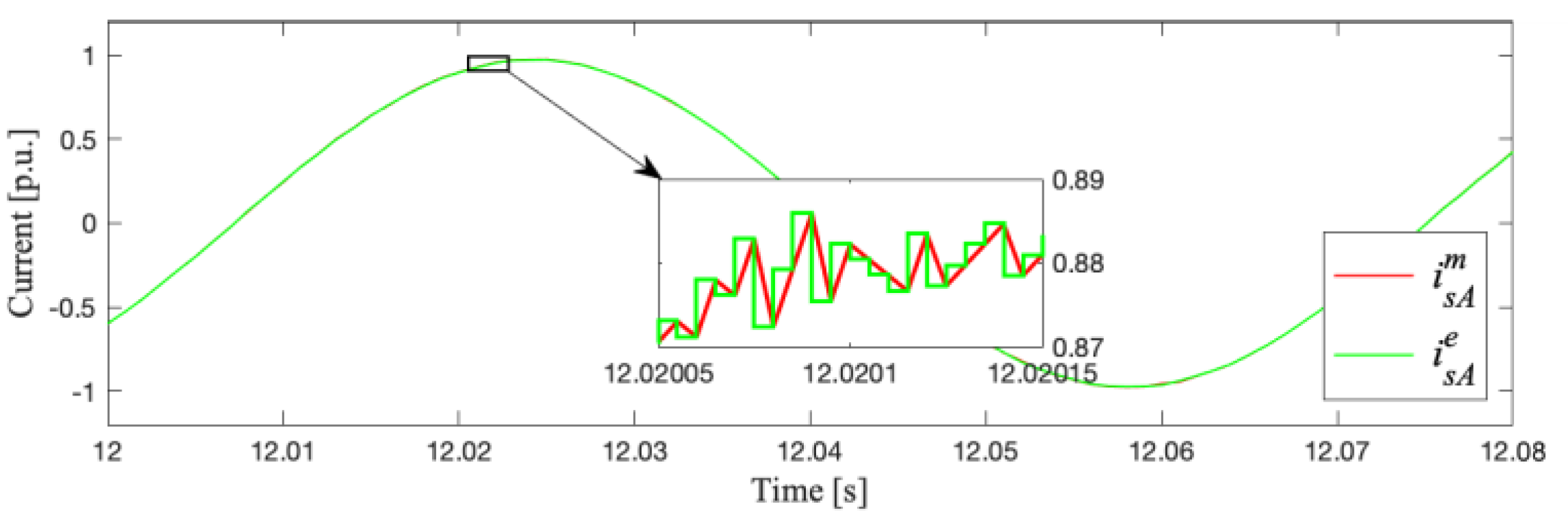
- the correct operation of the stator phase current estimation algorithm in a steady state of the drive operation was checked (the estimator was not included in the current feedback); and
- -
- this algorithm was tested in various drive operating conditions, with current estimation in a closed–loop structure.
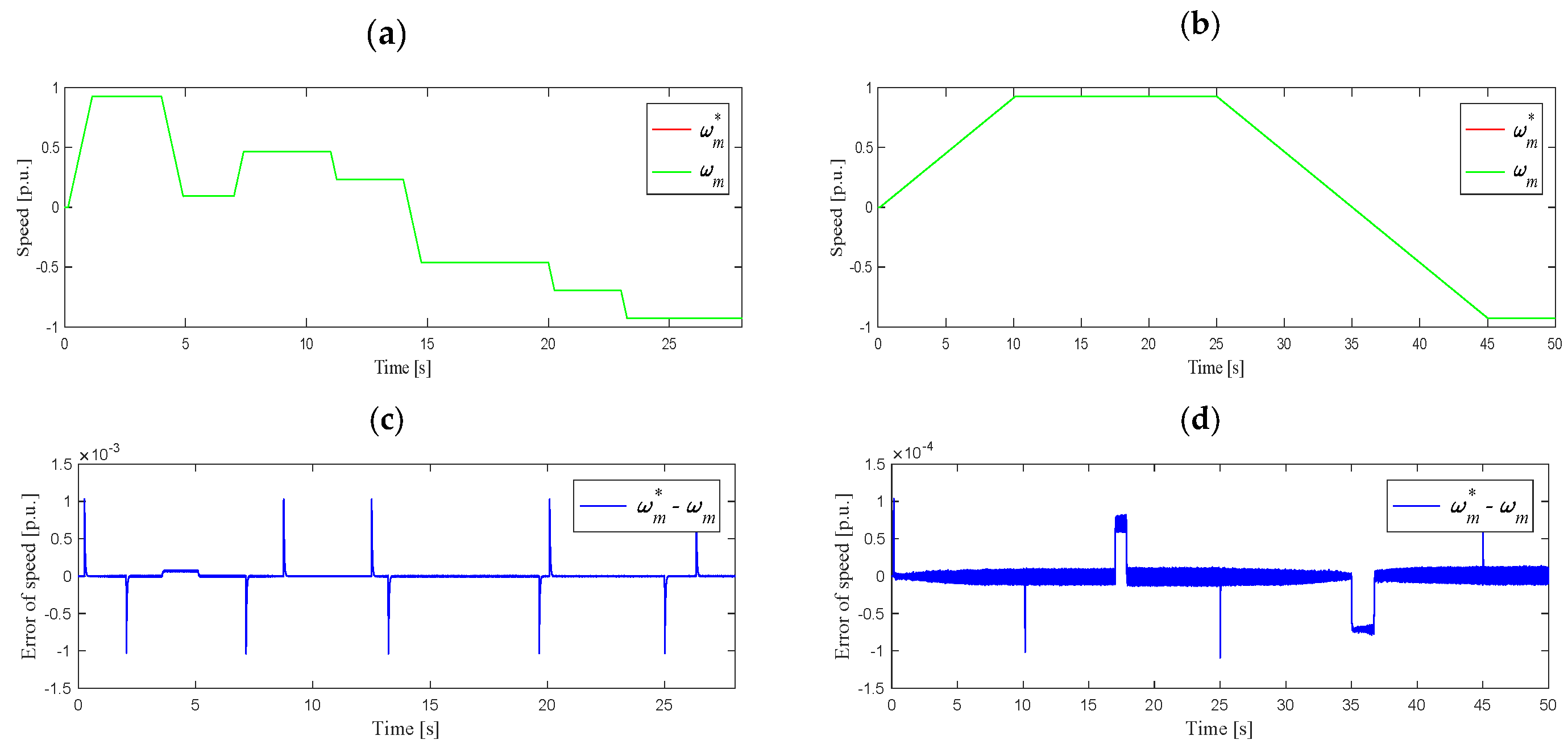
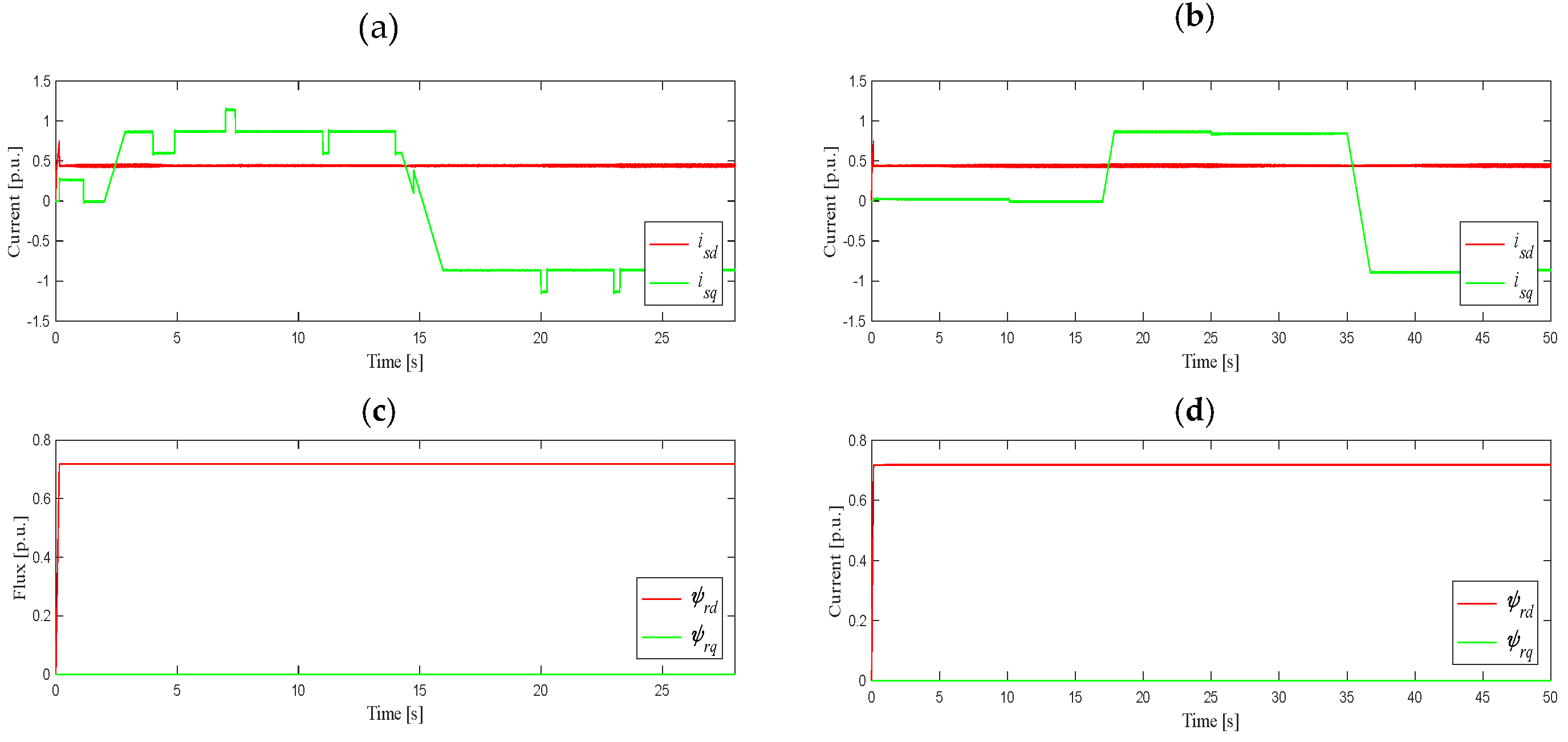
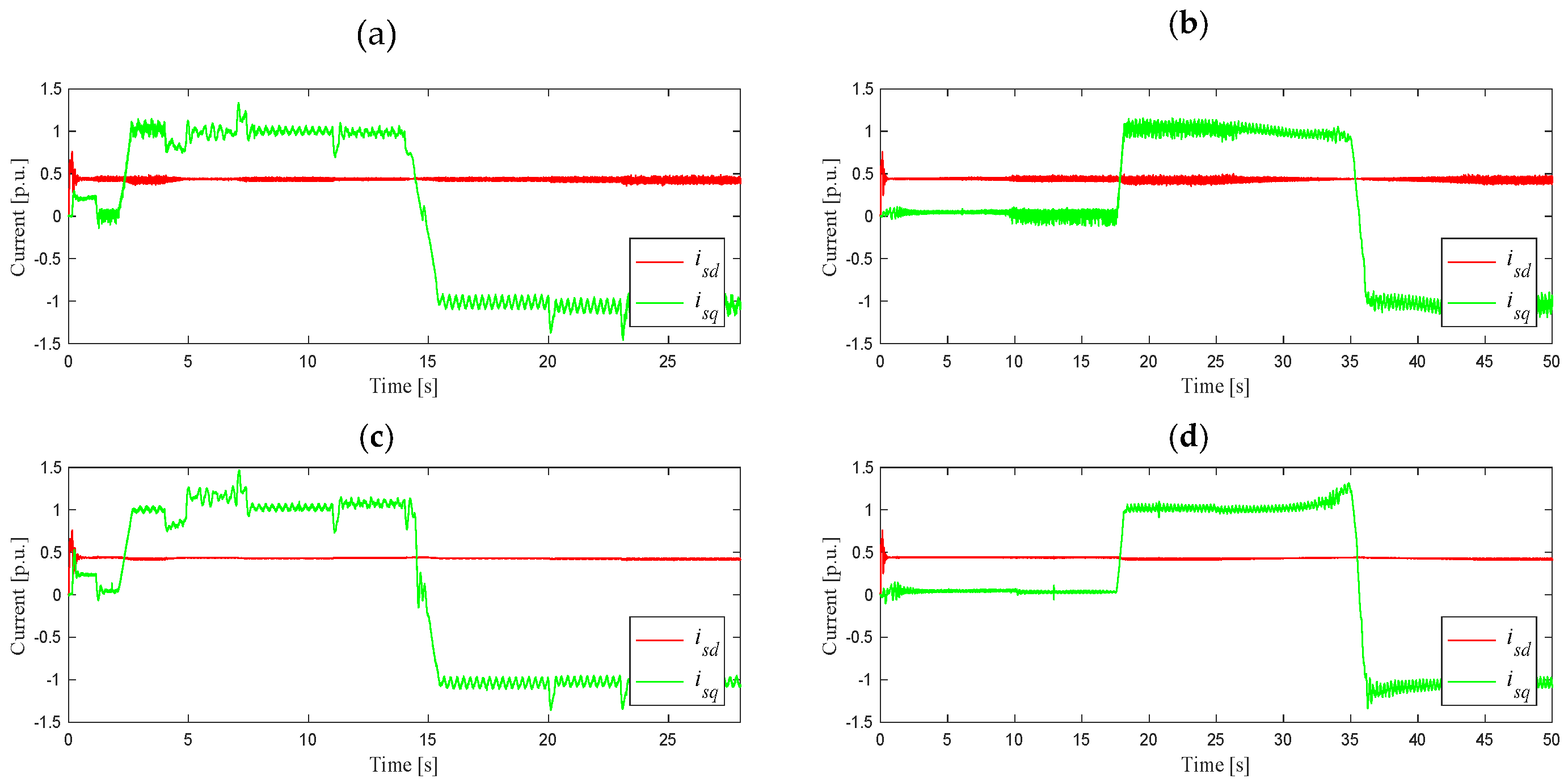
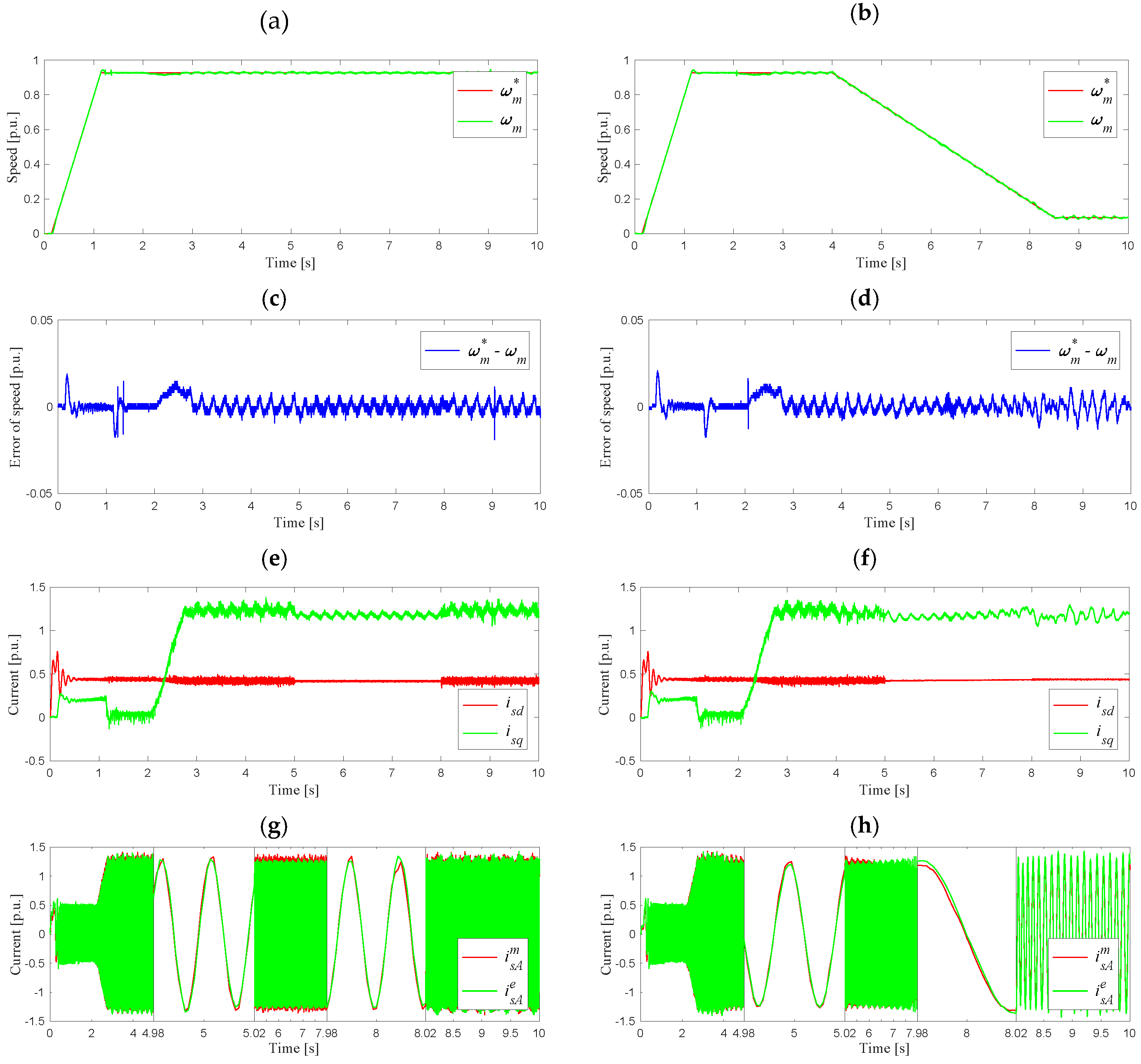
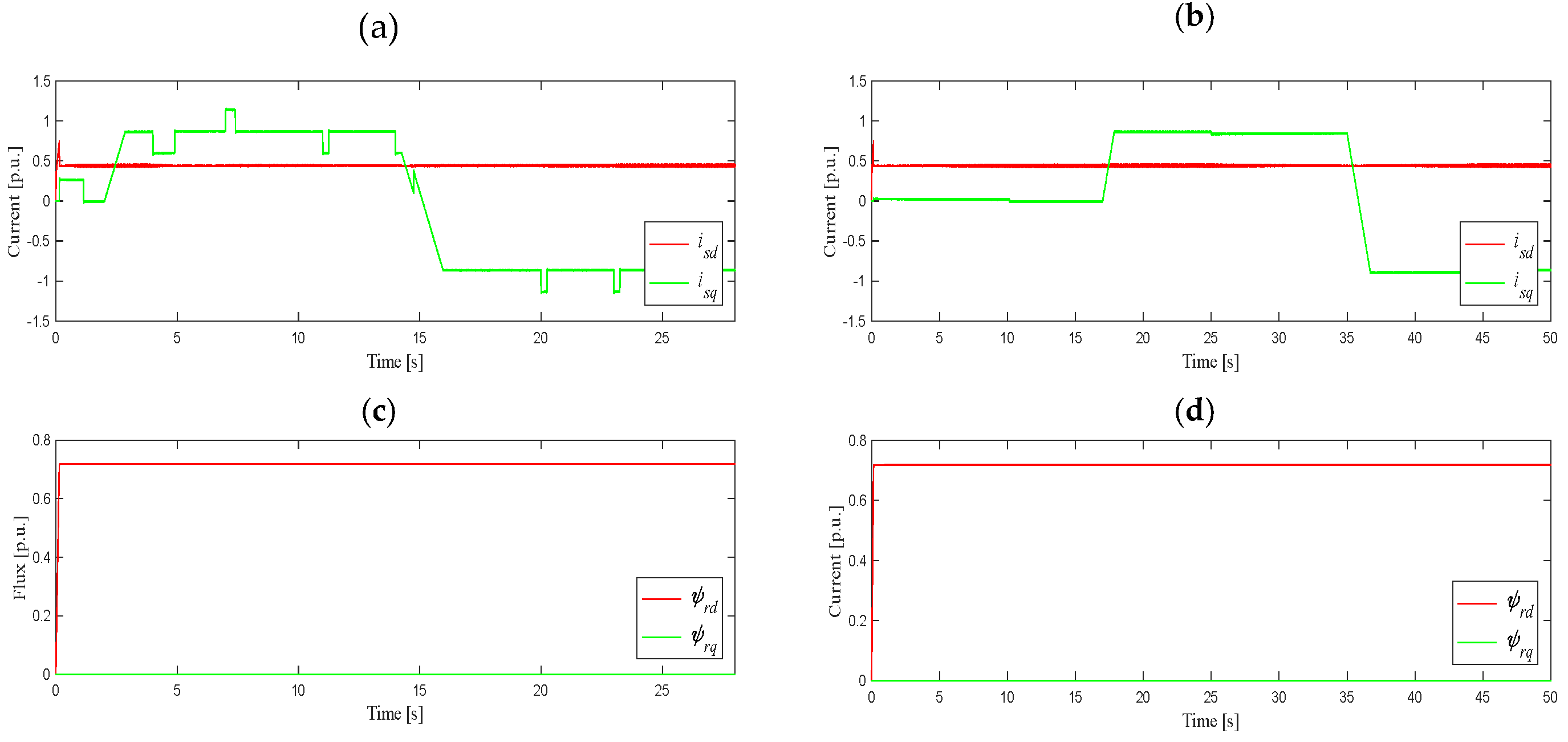
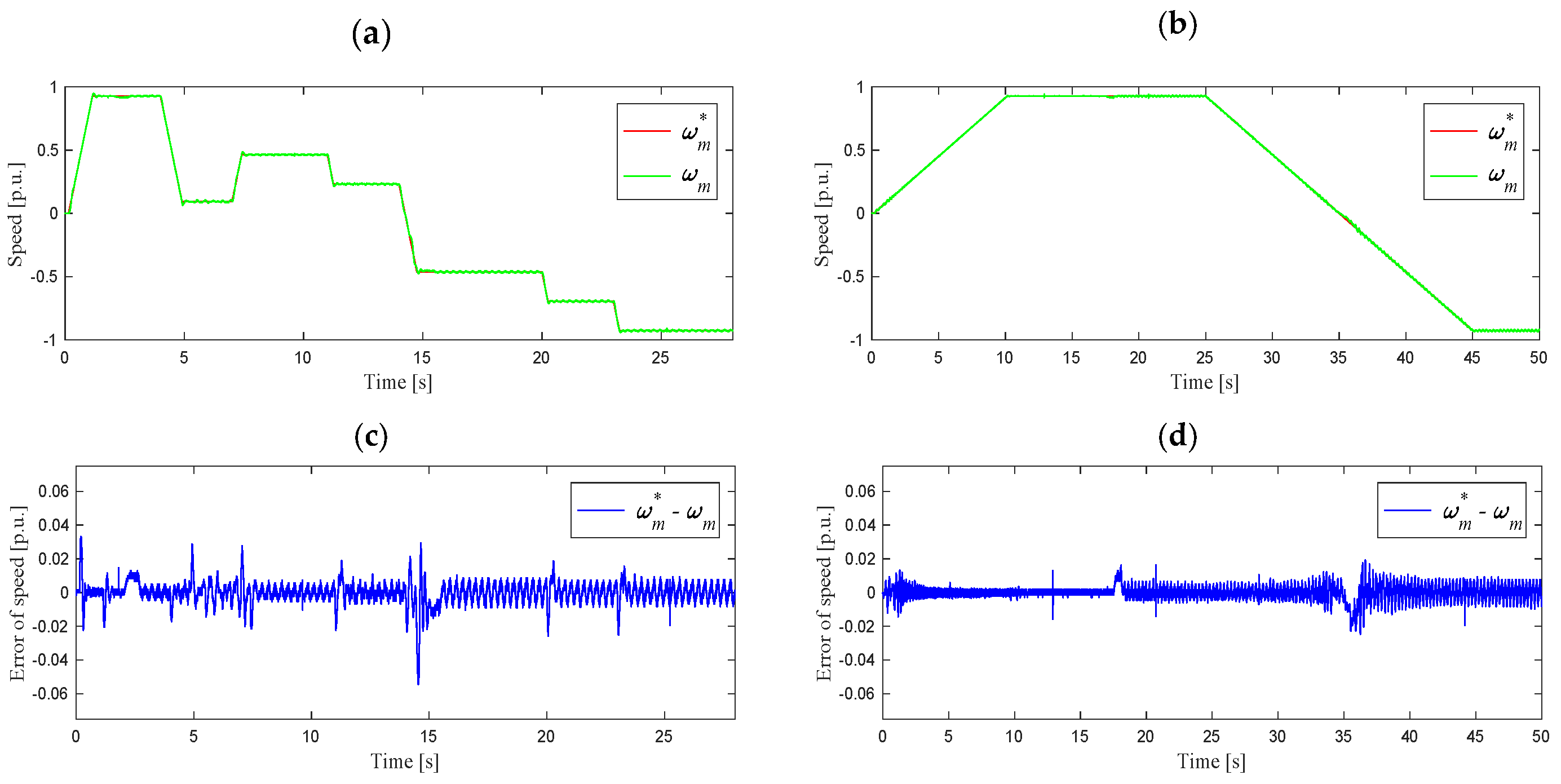
3.2. Analysis of the Drive System for Different Speed Trajectories in DRFOC Structure
4. Experimental Results
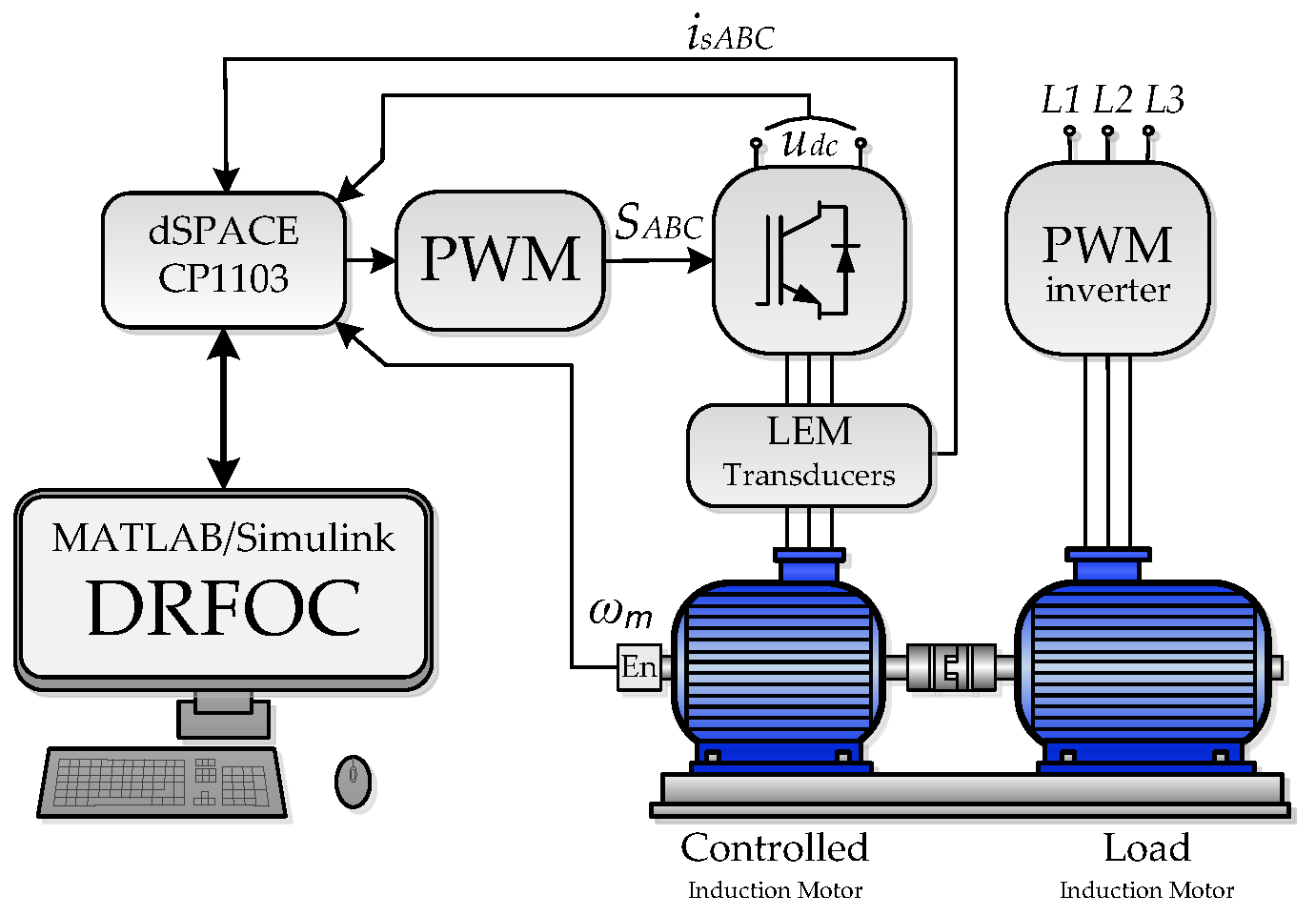
4.1. Description of the Experimental Set-Up and Test Scenarios
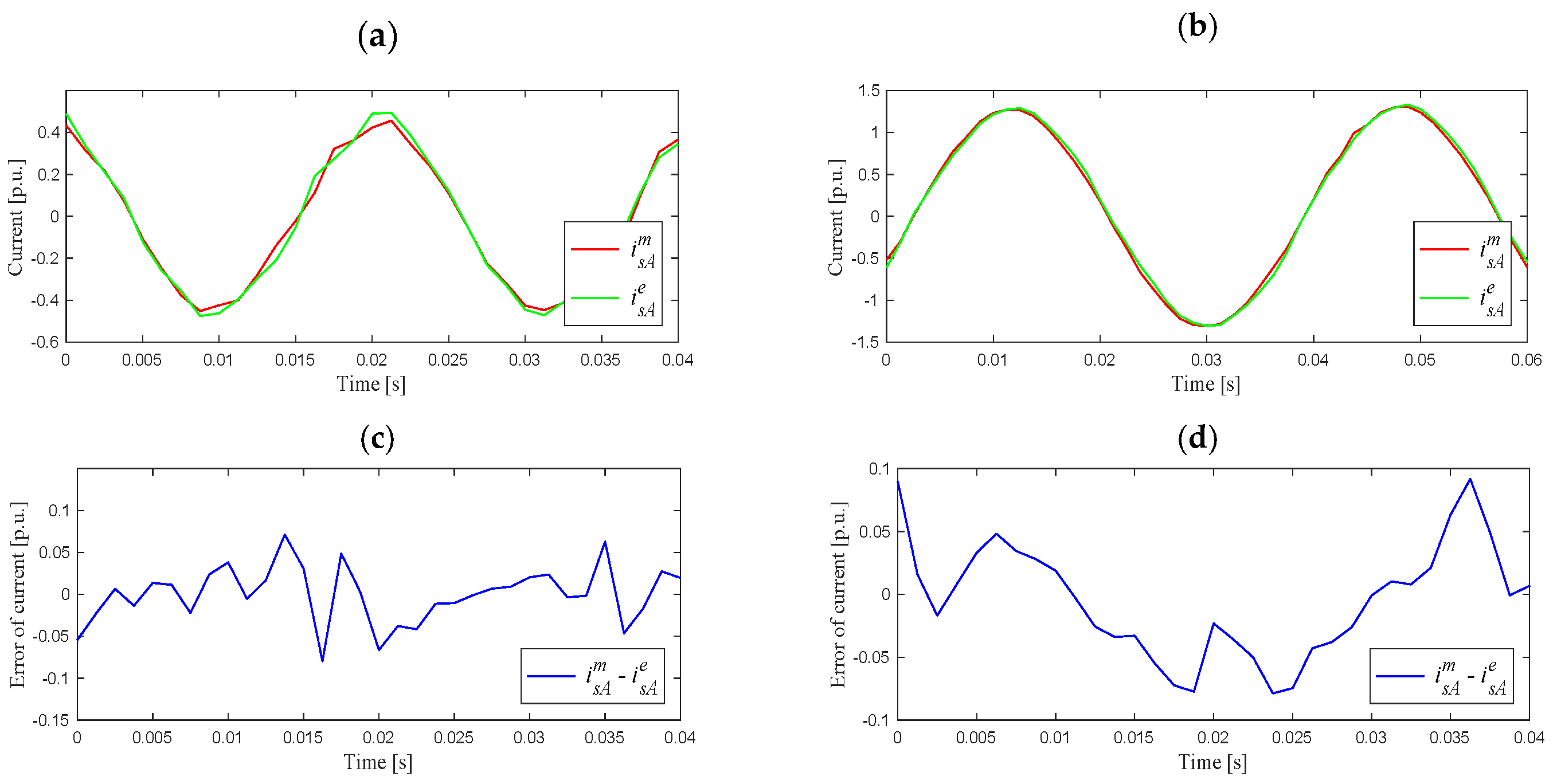
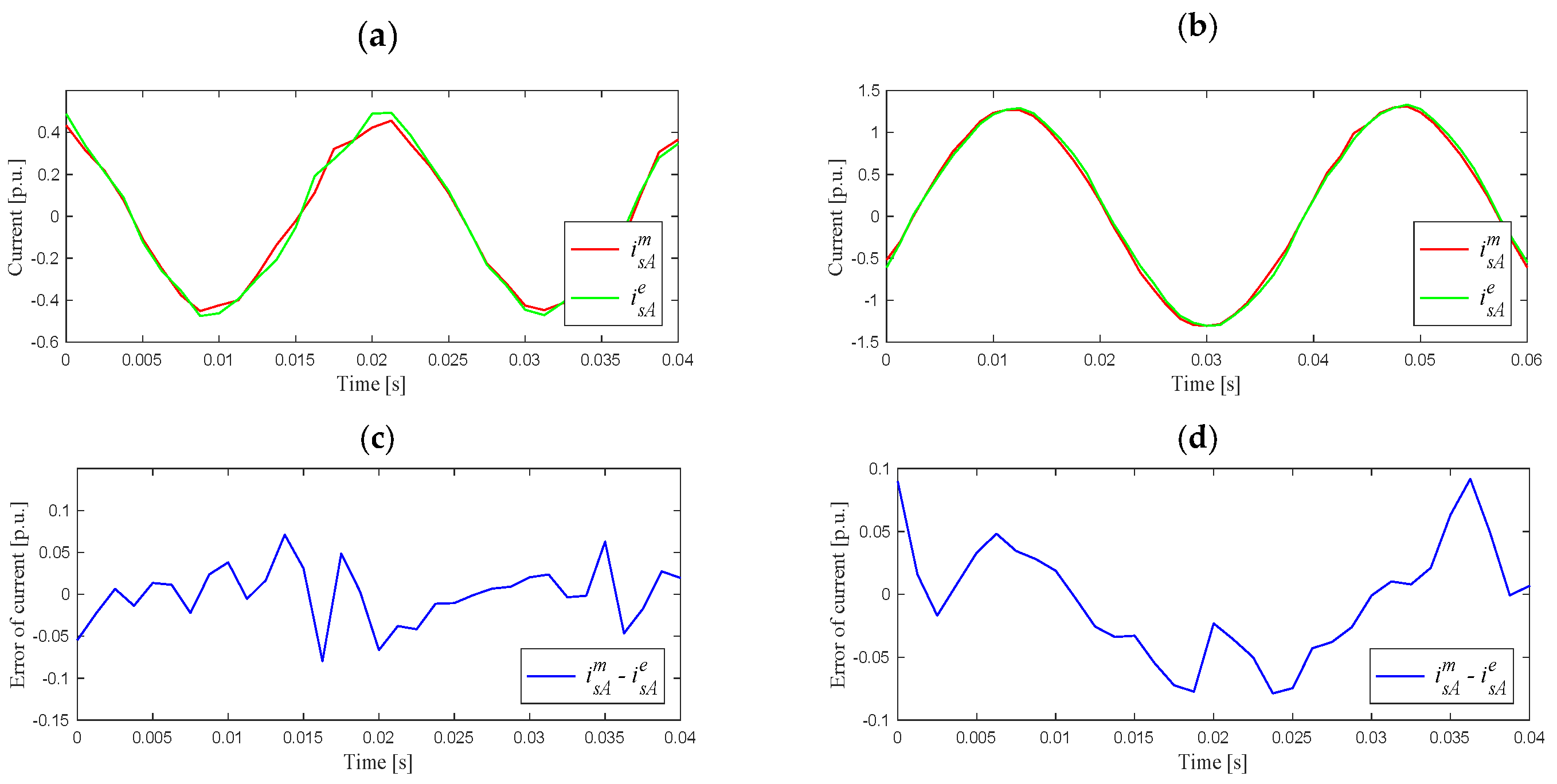
4.2. Analysis of the Stator Current Estimation in Various Operating Condition
- Rated speed, no load.
- Rated speed, 25% of the nominal value of the load.
- Rated speed, 50% of the nominal value of the load.
- Rated speed, 75% of the nominal value of the load.
- Rated speed and load torque.
- 25% of the nominal speed value, rated load.
- 50% of the nominal speed value, rated load.
- 75% of the rated speed, rated load.
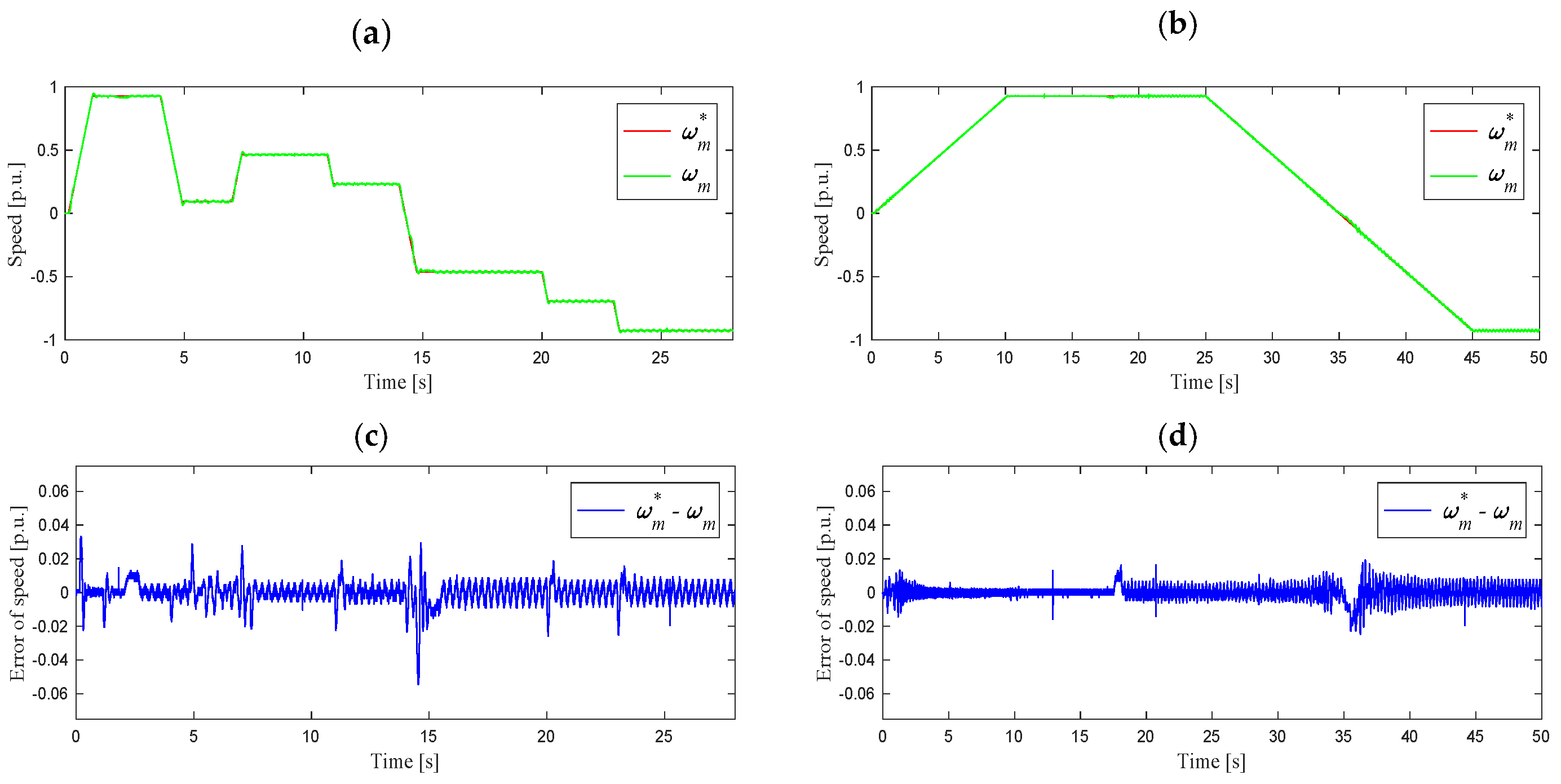
4.3. Analysis of the Current Estimation for Different Speed Trajectories
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | [ph.u.] | [p.u.] |
|---|---|---|
| Rated phase voltage UN | 230 V | 0.707 |
| Rated phase current IN | 2.5 A | 0.707 |
| Rated power PN | 1.1 kW | 0.638 |
| Rated speed nN | 1390 rpm | 0.927 |
| Rated frequency fsN | 50 Hz | - |
| Number of pole pairs pb | 2 | - |
| Stator winding resistance Rs | 5.114 Ω | 0.556 |
| Rotor winding resistance Rr | 5.064 Ω | 0.550 |
| Stator leakage inductance Lσs | 31.6 mH | 0.1079 |
| Rotor leakage inductance Lσr | 31.6 mH | 0.1079 |
| Main inductance Lm | 478 mH | 1.6323 |
| Mechanical time constant TM | 0.25 s | - |
References
- Djeziri, M.A.; Merzouki, R.; Bouamama, B.O.; Ouladsine, M. Fault Diagnosis and Fault-Tolerant Control of an Electric Vehicle Overactuated. IEEE Trans. Veh. Technol. 2013, 62, 986–994. [Google Scholar] [CrossRef]
- Kazmierkowski, M.P.; Krishnan, R.; Blaabjerg, F. Control in Power Electronics—Selected Problems; Academic Press: Cambridge, MA, USA, 2002. [Google Scholar]
- Orlowska-Kowalska, T. Sensoless Induction Motor Drives; Wroclaw University of Technology Press: Wroclaw, Poland, 2003. [Google Scholar]
- Gao, Z.; Cecati, C.; Ding, S.X. A Survey of Fault Diagnosis and Fault-Tolerant Techniques—Part I: Fault Diagnosis With Model-Based and Signal-Based Approaches. IEEE Trans. Ind. Electron. 2015, 62, 3757–3767. [Google Scholar] [CrossRef]
- Isermann, R. Fault-Diagnosis Applications, Model-Based Condition Monitoring: Actuators, Drives, Machinery, Plants, Sensors, and Fault-Tolerant Systems; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Orlowska-Kowalska, T.; Kowalski, C.T. Fault-Diagnosis and Fault-Tolerant-Control in Industrial Processes and Electrical Drives. In Advanced Control of Electrical Drives and Power Electronic Converters; Kabzinski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 101–120. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Dybkowski, M.; Kowalski, C.T. Rotor Fault Analysis in the Sensorless Field Oriented Controlled Induction Motor Drive. Automatika 2010, 51, 149–156. [Google Scholar] [CrossRef]
- Orlowska-Kowalska, T.; Sobanski, P. Simple Sensorless Diagnosis Method for Open-Switch Faults in SVM-VSI-fed Induction Motor Drive. In Proceedings of the 39th Annual Conference of the IEEE Industrial-Electronics-Society (IECON), Vienna, Austria, 10–13 November 2013; pp. 8210–8215. [Google Scholar] [CrossRef]
- Dybkowski, M.; Klimkowski, K.; Orlowska-Kowalska, T. Speed and Current Sensor Fault-Tolerant-Control of the Induction Motor Drive. In Advanced Control of Electrical Drives and Power Electronic Converters; Kabzinski, J., Ed.; Springer: Berlin/Heidelberg, Germany, 2017; pp. 141–167. [Google Scholar] [CrossRef]
- Dybkowski, M.; Klimkowski, K. Artificial Neural Network Application for Current Sensors Fault Detection in the Vector Controlled Induction Motor Drive. Sensors 2019, 19, 571. [Google Scholar] [CrossRef]
- Green, T.C.; Williams, B.W. Derivation of motor line-current wave-forms from the dc-link current of an inverter. Proc. Inst. Electron. Eng. 1989, 136, 196–204. [Google Scholar] [CrossRef]
- Jaeger, U.; Thoegersen, P. Single current sensor technique in the dc link of three-phase PWM-VS inverters: A review and a novel solution. IEEE Trans. Ind. Appl. 1997, 33, 1241–1253. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Pedersen, J.K. A new low-cost, fully fault-protected PWM-VSI inverter with true phase-current information. IEEE Trans. Power Electron. 1997, 12, 187–197. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Pedersen, J.K. An ideal PWM-VSI inverter using only one current sensor in the DC-link. In Proceedings of the 5th International Power Electronics Variable-Speed Drives Conference, London, UK, 26–28 October 1994; pp. 458–464. [Google Scholar] [CrossRef]
- Lee, W.C.; Hyun, D.S.; Lee, T.K. A novel control method for three- phase PWM rectifiers using a single current sensor. IEEE Trans. Power Electron. 2000, 15, 861–870. [Google Scholar] [CrossRef]
- Lee, W.C.; Lee, T.K.; Hyun, D.S. Comparison of single-sensor current control in the dc link for three-phase voltage-source PWM converters. IEEE Trans. Ind. Electron. 2001, 48, 491–505. [Google Scholar] [CrossRef]
- Lee, D.-C.; Lim, D.-S. AC voltage and current sensorless control of three-phase PWM rectifiers. IEEE Trans. Power Electron. 2002, 17, 883–890. [Google Scholar] [CrossRef]
- Kim, H.R.; Jahns, T.M. Phase current reconstruction for ac motor drives using a dc-link single current sensor and measurement voltage vectors. In Proceedings of the 36th Power Electronics Specialists Conference (PESC), Recife, Brazil, 12–16 June 2005. [Google Scholar] [CrossRef]
- Kim, H.R.; Jahns, T.M. Current control for AC motor drives using a single dc-link current sensor and measurement voltage vectors. IEEE Trans. Ind. Appl. 2006, 42, 1539–1547. [Google Scholar] [CrossRef]
- Metidji, B.; Taib, N.; Baghli, L.; Rekioua, T.; Bacha, S. Low-Cost Direct Torque Control Algorithm for Induction Motor Without AC Phase Current Sensors. IEEE Trans. Power Electron. 2012, 27, 4132–4139. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, M.; Wang, Z.; Zhang, B. Fast switching direct torque control using a single DC-link current sensor. J. Power Electron. 2012, 12, 895–903. [Google Scholar] [CrossRef]
- Gu, Y.; Ni, F.; Yang, D.; Liu, H. Switching-State Phase Shift Method for Three-Phase-Current Reconstruction with a Single DC-Link Current Sensor. IEEE Trans. Ind. Electron. 2011, 58, 5186–5194. [Google Scholar] [CrossRef]
- Yang, S.-C. Saliency-Based Position Estimation of Permanent-Magnet Synchronous Machines Using Square-Wave Voltage Injection with a Single Current Sensor. IEEE Trans. Ind. Appl. 2015, 51, 1561–1571. [Google Scholar] [CrossRef]
- Cho, Y.; LaBella, T.; Lai, J.-S. A three-phase current reconstruction strategy with online current offset compensation using a single current sensor. IEEE Trans. Ind. Electron. 2012, 59, 2924–2933. [Google Scholar] [CrossRef]
- Hao, Y.; Xu, Y.; Zou, J. A Phase Current Reconstruction Approach for Three-Phase Permanent-Magnet Synchronous Motor Drive. Energies 2016, 9, 853–868. [Google Scholar] [CrossRef]
- Xu, Y.X.; Yan, H.; Zou, J.B.; Wang, B.C.; Li, Y.H. Zero voltage vector sampling method for PMSM three-phase current reconstruction using single current sensor. IEEE Trans. Power Electron. 2017, 32, 3797–3807. [Google Scholar] [CrossRef]
- Ha, J.I. Current prediction in vector-controlled PWM inverters using single DC-Link current sensor. IEEE Trans. Ind. Electron. 2010, 57, 716–726. [Google Scholar] [CrossRef]
- Aoyagi, S.; Iwaji, Y.; Tobari, K.; Sakamoto, K. A novel PWM pulse modifying method for reconstructing three-phase AC currents from DC bus currents of inverter. In Proceedings of the 2009 International Conference on Electrical Machines and Systems (ICEMS), Tokyo, Japan, 15–18 November 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Adamczyk, M.; Orlowska-Kowalska, T. Field-oriented-control of the induction motor without measurement of phase current. Prz. Elektrotech. 2019, 95, 151–155. [Google Scholar] [CrossRef]
- Marcetic, D.; Krcmar, I.; Gecic, M.; Matic, P. Discrete rotor flux and speed estimators for high-speed shaft-sensorless IM drives. IEEE Trans. Ind. Electron. 2014, 61, 3099–3108. [Google Scholar] [CrossRef]
- Hydro-Québec. TransÉnergie Technologies, SimPowerSystems—User’s Guide Ver. 3; Hydro-Québec: Montreal, QC, Canada, 2003. [Google Scholar]



| Test (Case) | (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) |
|---|---|---|---|---|---|---|---|---|
| ei [%] | 7.998 | 6.726 | 4.472 | 3.282 | 5.501 | 4.134 | 3.021 | 3.491 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Adamczyk, M.; Orlowska-Kowalska, T. Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors 2019, 19, 4979. https://doi.org/10.3390/s19224979
Adamczyk M, Orlowska-Kowalska T. Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors. 2019; 19(22):4979. https://doi.org/10.3390/s19224979
Chicago/Turabian StyleAdamczyk, Michal, and Teresa Orlowska-Kowalska. 2019. "Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive" Sensors 19, no. 22: 4979. https://doi.org/10.3390/s19224979
APA StyleAdamczyk, M., & Orlowska-Kowalska, T. (2019). Virtual Current Sensor in the Fault-Tolerant Field-Oriented Control Structure of an Induction Motor Drive. Sensors, 19(22), 4979. https://doi.org/10.3390/s19224979