Task Offloading Based on Lyapunov Optimization for MEC-Assisted Vehicular Platooning Networks


Abstract
1. Introduction
2. Related Work
- The problem of task offloading optimization is modeled as a minimum average total energy consumption each time by combining each member in platooning with the MEC server.
- To meet the requirements of the execution deadline and energy consumption, an optimization algorithm based on Lyapunov function is proposed, and a greedy algorithm is adopted to approximate the sub-optimal decision.
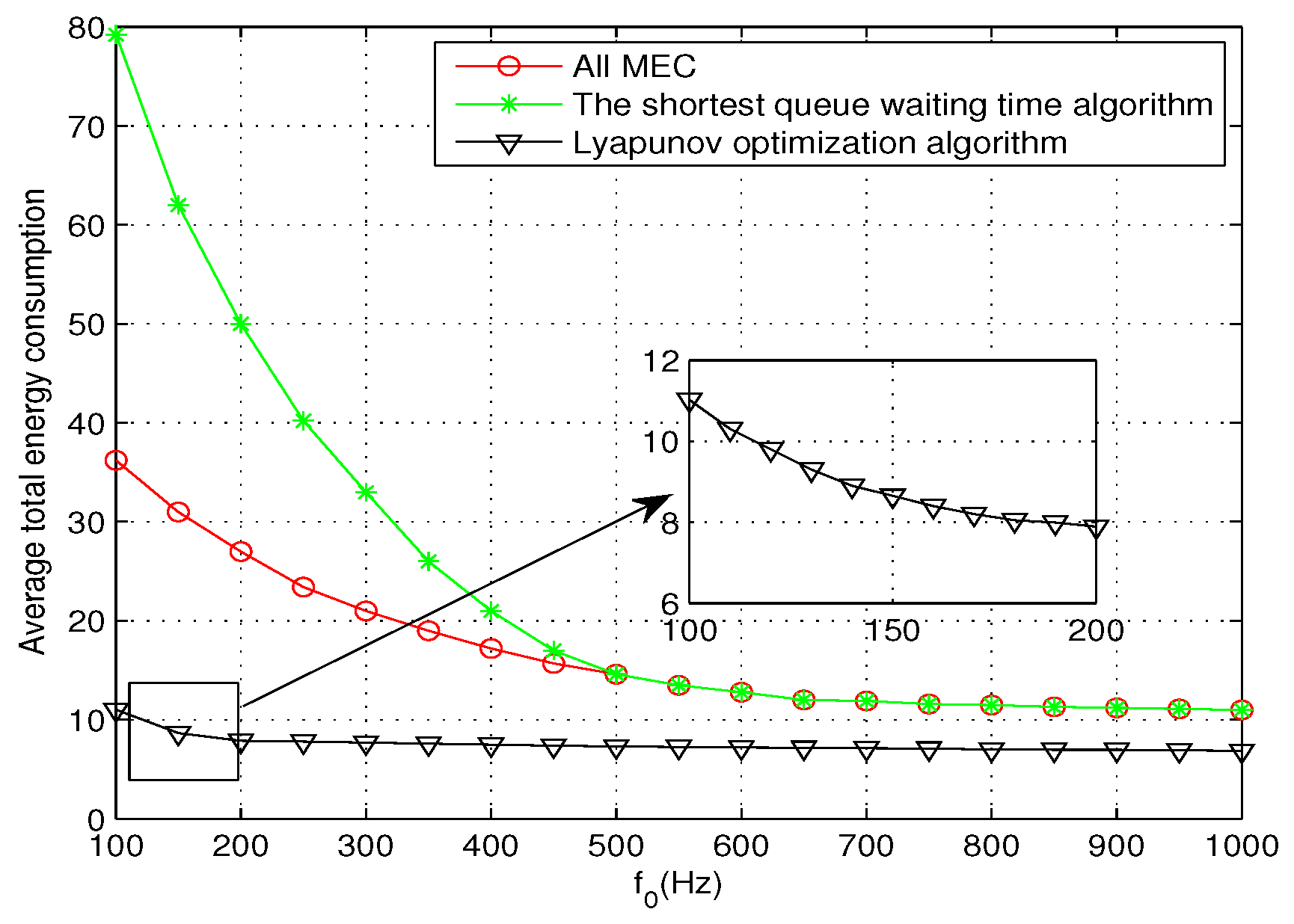
- The proposed algorithm can significantly reduce the energy consumption of platooning members (PMs) compared with the shortest queue waiting time algorithm and the full offloading to an MEC algorithm.
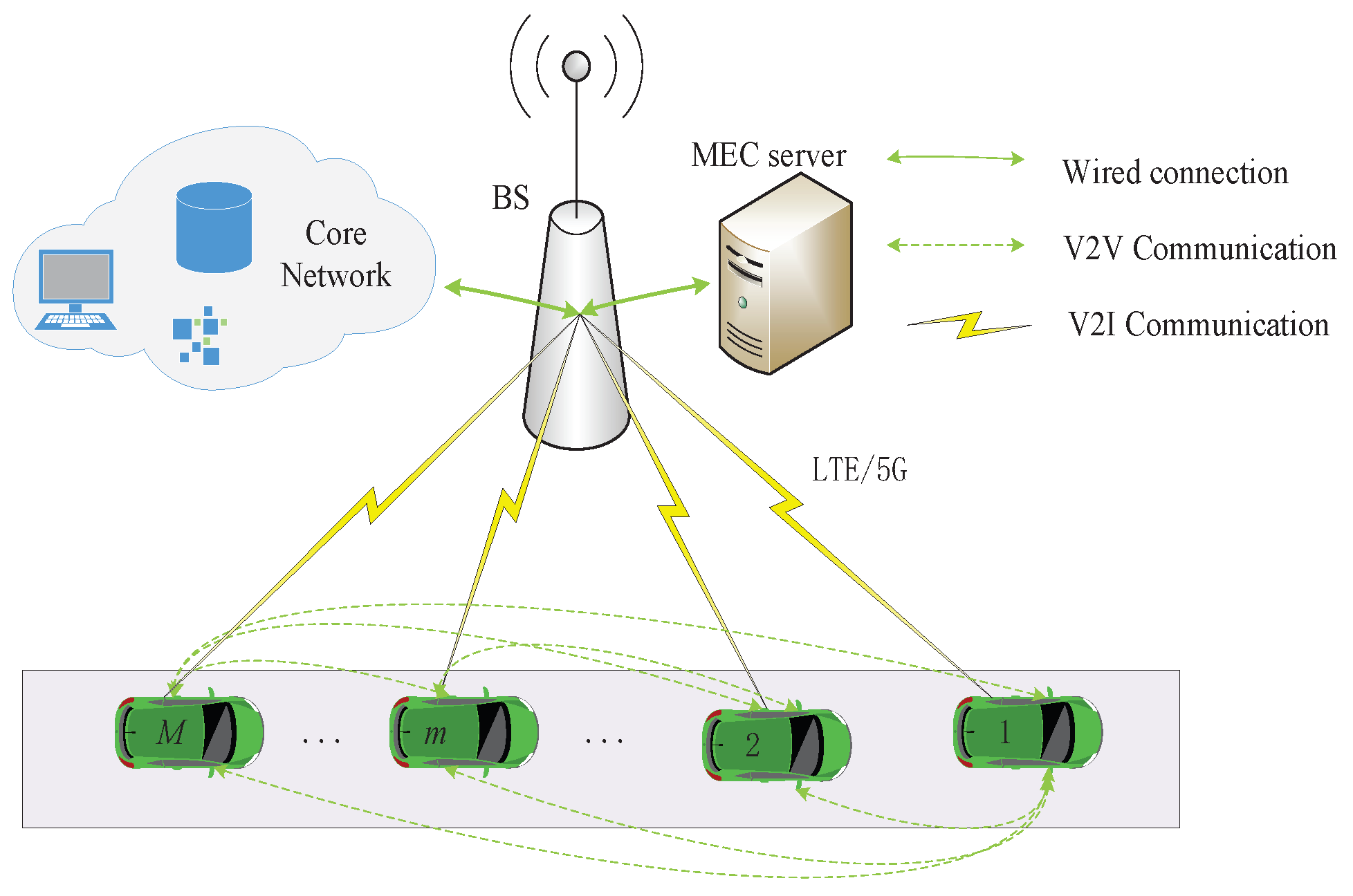
3. System Model
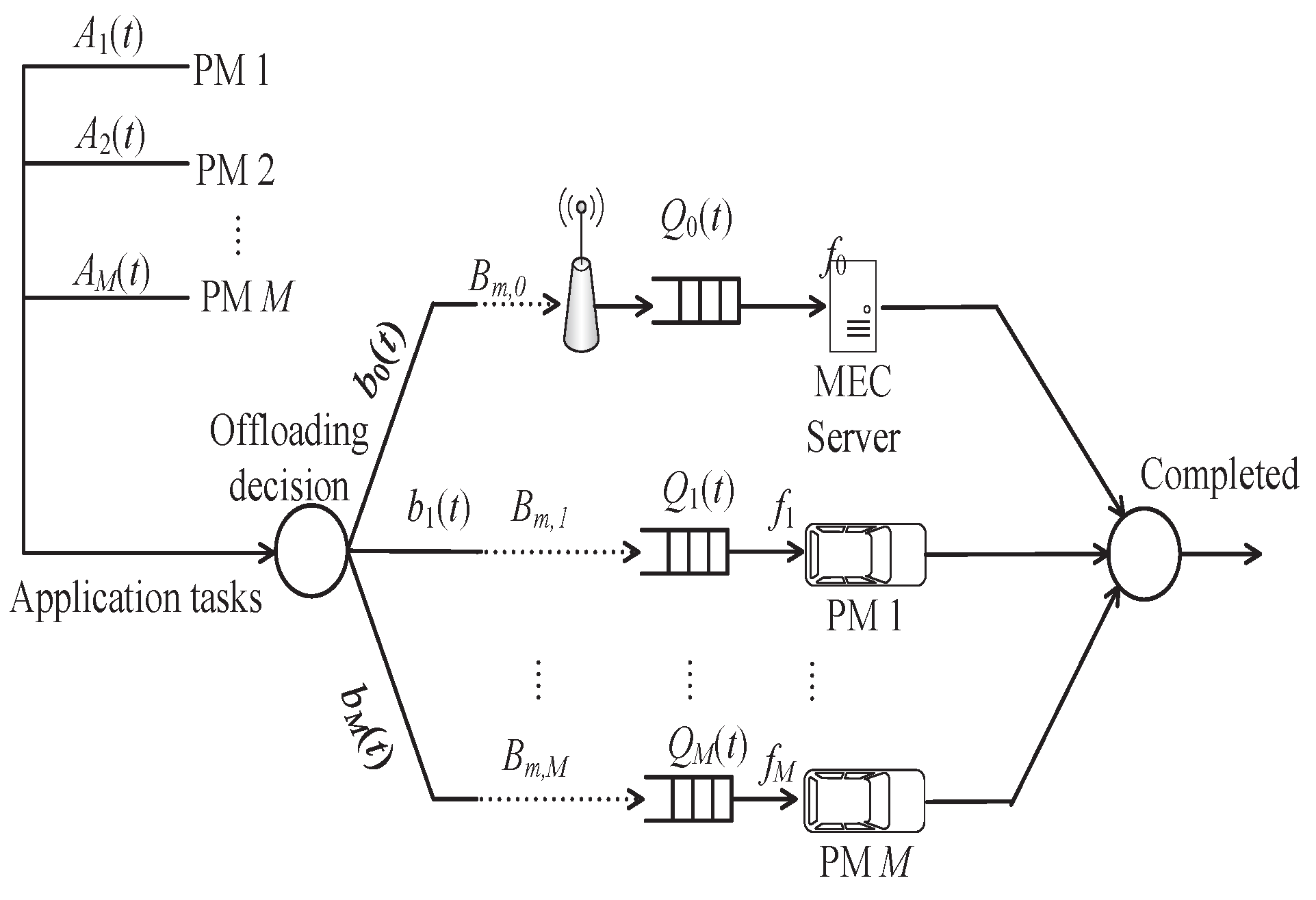
3.1. Task Offloading Model
3.2. Communication Model
3.3. Computation Model
4. Problem Formulation
5. Problem Solution
5.1. Offloading Decision
5.2. Optimization Based on Lyapunov
5.3. Optimization Based on a Greedy Algorithm
| Algorithm 1 Greedy Algorithm |
|
6. Simulation Results
6.1. Parameter Settings
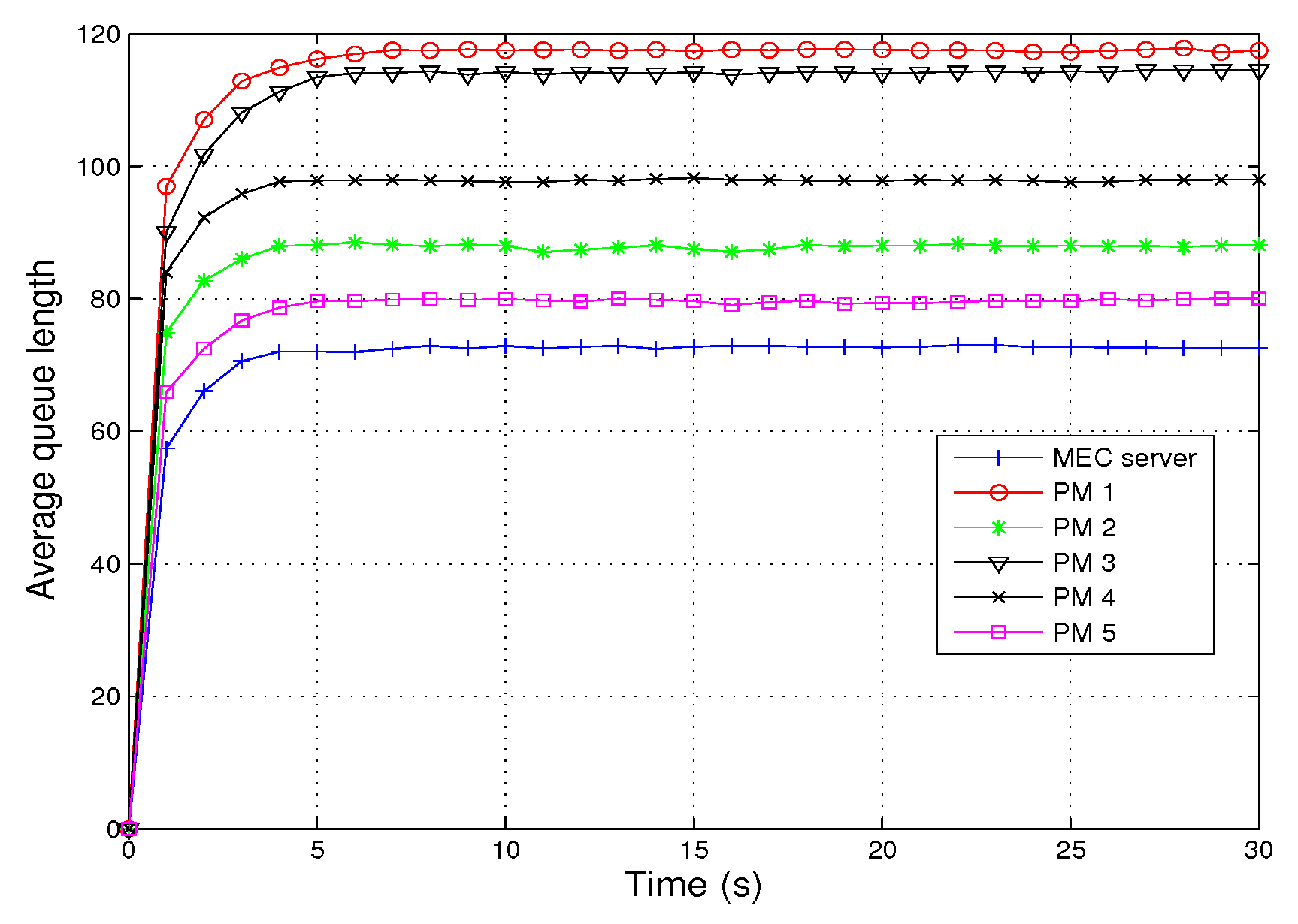
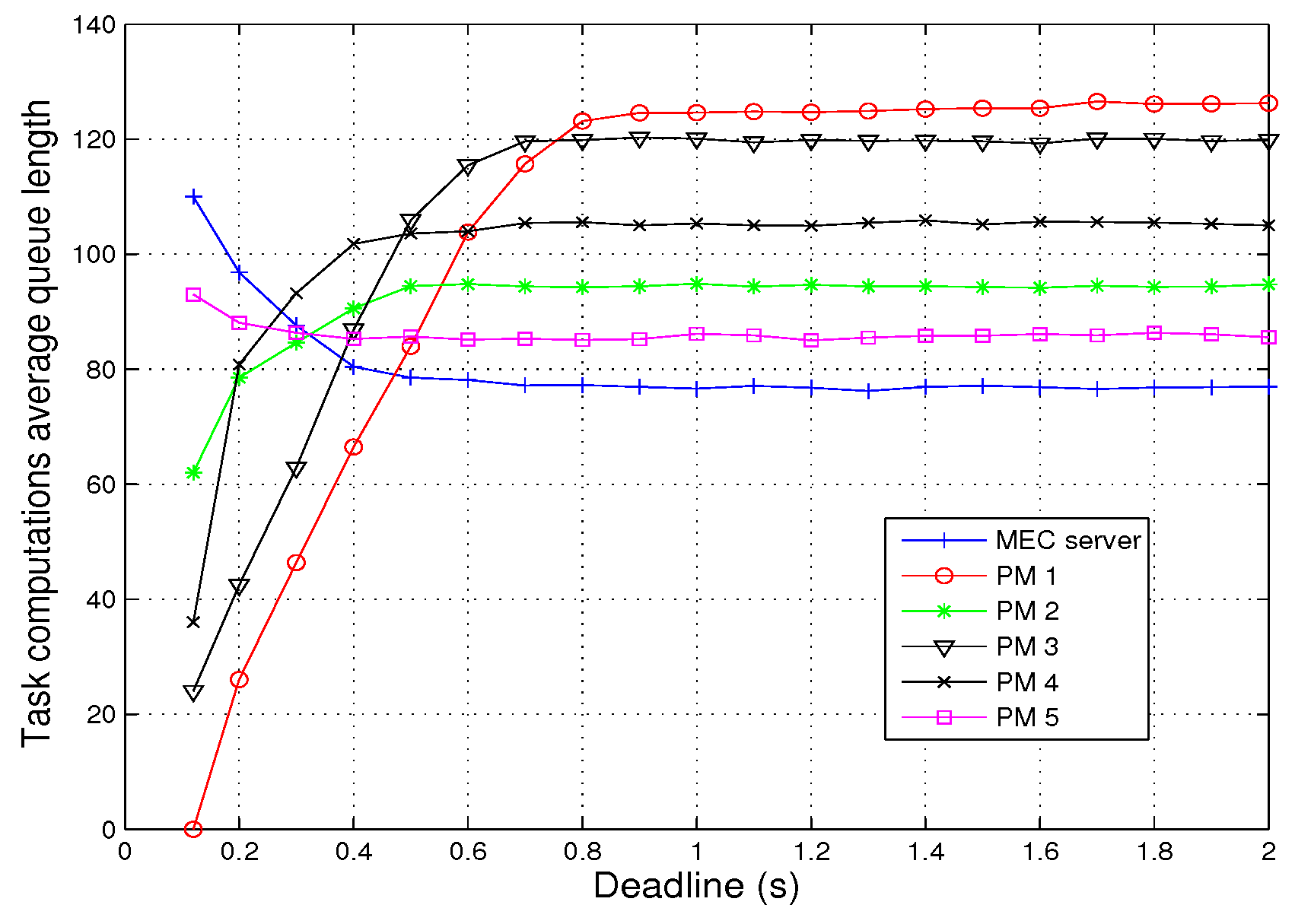
6.2. Performance Analysis
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Makinen, O. Streaming at the Edge: Local Service Concepts Utilizing Mobile Edge Computing. In Proceedings of the 2015 9th International Conference on Next, Generation Mobile Applications, Services and Technologies, Cambridge, UK, 9–11 September 2015; pp. 1–6. [Google Scholar]
- 3GPP TR 22.885 V14.0.0. Study on LTE Support for Vehicle to Everything (V2X) Services. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2898 (accessed on 13 November 2019).
- 3GPP TS 22.186 V15.0.0. Enhancement of 3GPP Support for V2X Scenarios. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 13 November 2019).
- Axelsson, J. Safety in Vehicle Platooning: A Systematic Literature Review. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1033–1045. [Google Scholar] [CrossRef]
- Wang, R.; Wu, J.; Yan, J. Resource Allocation for D2D-Enabled Communications in Vehicle Platooning. IEEE Access 2018, 6, 50526–50537. [Google Scholar] [CrossRef]
- Mao, Y.; You, C.; Zhang, J.; Huang, K. A Survey on Mobile Edge Computing: The Communication Perspective. IEEE Commun. Surv. Tutor. 2017, 19, 2322–2358. [Google Scholar] [CrossRef]
- Cicirelli, F. Edge Computing and Social Internet of Things for Large-Scale Smart Environments Development. IEEE Internet Things J. 2018, 5, 2557–2571. [Google Scholar] [CrossRef]
- Li, H.; Shou, G.; Hu, Y.; Guo, Z. Mobile Edge Computing: Progress and Challenges. In Proceedings of the 2016 4th IEEE International Conference on Mobile Cloud Computing, Services, and Engineering (MobileCloud), Oxford, UK, 29 March–1 April 2016; pp. 83–84. [Google Scholar]
- Tran, T.; Pompili, D. Joint Task Offloading and Resource Allocation for Multi-Server Mobile-Edge Computing Networks. IEEE Trans. Veh. Technol. 2019, 68, 856–868. [Google Scholar] [CrossRef]
- Wang, Y.; Sheng, M.; Wang, X.; Wang, L.; Li, J. Mobile-Edge Computing: Partial Computation Offloading Using Dynamic Voltage Scaling. IEEE Trans. Commun. 2016, 64, 4268–4282. [Google Scholar] [CrossRef]
- Taleb, T.; Samdanis, K.; Mada, B.; Flinck, H. Dutta, S. Sabella, D. On Multi-Access Edge Computing: A Survey of the Emerging 5G Network Edge Cloud Architecture and Orchestration. IEEE Commun. Surv. Tutor. 2017, 19, 1657–1681. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, J.; Letaief, K. Joint Subcarrier and CPU Time Allocation for Mobile Edge Computing. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Zhao, P.; Tian, H.; Qin, C.; Nie, G. Energy-Saving Offloading by Jointly Allocating Radio and Computational Resources for Mobile Edge Computing. IEEE Access 2017, 5, 11255–11268. [Google Scholar] [CrossRef]
- Mao, Y.; Zhang, J.; Song, S.; Letaief, K. Power-Delay Tradeoff in Multi-User Mobile-Edge Computing Systems. In Proceedings of the 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar]
- Wu, H.; Sun, Y.; Wolter, K. Energy-Efficient Decision Making for Mobile Cloud Offloading. IEEE Trans. Cloud Comput. 2018, 1. [Google Scholar] [CrossRef]
- Chen, X.; Jiao, L.; Li, W.; Fu, X. Efficient Multi-User Computation Offloading for Mobile-Edge Cloud Computing. IEEE/ACM Trans. Netw. 2016, 24, 2795–2808. [Google Scholar] [CrossRef]
- Li, J.; Gao, H.; Lv, T.; Lu, Y. Deep reinforcement learning based computation offloading and resource allocation for MEC. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Zhang, J. Energy-Latency Tradeoff for Energy-Aware Offloading in Mobile Edge Computing Networks. IEEE Internet Things J. 2018, 5, 2633–2645. [Google Scholar] [CrossRef]
- Liu, M.; Liu, Y. Price-Based Distributed Offloading for Mobile-Edge Computing With Computation Capacity Constraints. IEEE Wirel. Commun. Lett. 2018, 7, 420–423. [Google Scholar] [CrossRef]
- Zhang, K.; Mao, Y.; Leng, S.; Vinel, A.; Zhang, Y. Delay constrained offloading for Mobile Edge Computing in cloud-enabled vehicular networks. In Proceedings of the 2016 8th International Workshop on Resilient Networks Design and Modeling (RNDM), Halmstad, Sweden, 12–15 September 2016; pp. 288–294. [Google Scholar]
- Zhang, K.; Mao, Y.; Leng, S.; Maharjan, S.; Zhang, Y. Optimal delay constrained offloading for vehicular edge computing networks. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Huang, R.; Chang, B.; Tsai, Y.; Liang, Y. Mobile Edge Computing-Based Vehicular Cloud of Cooperative Adaptive Driving for Platooning Autonomous Self Driving. In Proceedings of the 2017 IEEE 7th International Symposium on Cloud and Service Computing (SC2), Kanazawa, Japan, 22–25 November 2017; pp. 32–39. [Google Scholar]
- Fan, X.; Cui, T.; Cao, C.; Chen, Q.; Kwak, K. Minimum-Cost Offloading for Collaborative Task Execution of MEC-Assisted Platooning. Sensors 2019, 19, 847. [Google Scholar] [CrossRef] [PubMed]
- Hu, Y.; Cui, T.; Huang, X.; Chen, Q. Task Offloading Based on Lyapunov Optimization for MEC-assisted Platooning. In Proceedings of the WCSP 2019, Xi’an, China, 23–25 October 2019; pp. 1–5. [Google Scholar]
- Jia, Q. Energy-efficient computation offloading in 5G cellular networks with edge computing and D2D communications. IET Commun. 2019, 13, 1122–1130. [Google Scholar] [CrossRef]
- Lozano, D.; Mateo, S. Review on V2X, I2X, and P2X Communications and Their Applications: A Comprehensive Analysis over Time. Sensors 2019, 19, 2756. [Google Scholar] [CrossRef] [PubMed]
- Popovski, P. Ultra-reliable communication in 5G wireless systems. Comput. Sci. 2014, 26, 39–51. [Google Scholar]
- Zhao, J.; Li, Q.; Gong, Y.; Zhang, K. Computation Offloading and Resource Allocation For Cloud Assisted Mobile Edge Computing in Vehicular Networks. IEEE Trans. Veh. Technol. 2019, 68, 7944–7956. [Google Scholar] [CrossRef]
- Zhang, K.; Zhu, Y.; Leng, S.; He, Y.; Maharjan, S.; Zhang, Y. Deep Learning Empowered Task Offloading for Mobile Edge Computing in Urban Informatics. IEEE Internet Things J. 2019, 6, 7635–7647. [Google Scholar] [CrossRef]
- Yu, X.; Guan, M.; Liao, M.; Fan, X. Pre-Migration of Vehicle to Network Services Based on Priority in Mobile Edge Computing. IEEE Access 2019, 7, 722–3730. [Google Scholar] [CrossRef]
- Lehr, H.; Chapin, M. On the Convergence of Wired and Wireless Access Network Architectures. Inf. Econ. Policy 2010, 1, 33–41. [Google Scholar] [CrossRef]
- Zhou, Z.; Liu, P.; Feng, J.; Zhang, Y.; Mumtaz, S.; Rodriguez, J. Computation Resource Allocation and Task Assignment Optimization in Vehicular Fog Computing: A Contract-Matching Approach. IEEE Trans. Veh. Technol. 2019, 68, 3113–3125. [Google Scholar] [CrossRef]
- Hou, X.; Li, Y.; Chen, M.; Wu, D.; Jin, D.; Chen, S. Vehicular Fog Computing: A Viewpoint of Vehicles as the Infrastructures. IEEE Trans. Veh. Technol. 2016, 65, 3860–3873. [Google Scholar] [CrossRef]
- Karedal, J.; Czink, N.; Paier, A. Path Loss Modeling for Vehicle-to-Vehicle Communications. IEEE Trans. Veh. Technol. 2011, 60, 323–328. [Google Scholar] [CrossRef]
- Lyu, X.; Tian, H.; Zhang, P. Multi-User Joint Task Offloading and Resources Optimization in Proximate Clouds. IEEE Trans. Veh. Technol. 2016, 66, 1. [Google Scholar]
- Zhang, K. Energy-Efficient Offloading for Mobile Edge Computing in 5G Heterogeneous Networks. IEEE Access 2016, 4, 5896–5907. [Google Scholar] [CrossRef]
- Wang, F.; Xu, J.; Wang, X.; Cui, S. Joint Offloading and Computing Optimization in Wireless Powered Mobile-Edge Computing Systems. IEEE Trans. Wirel. Commun. 2018, 17, 1784–1797. [Google Scholar] [CrossRef]
- Wei, F.; Chen, S.; Zou, W. A greedy algorithm for task offloading in mobile edge computing system. China Commun. 2018, 15, 149–157. [Google Scholar] [CrossRef]
- Sun, Y. Adaptive Learning-Based Task Offloading for Vehicular Edge Computing Systems. IEEE Trans. Veh. Technol. 2019, 68, 3061–3074. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, S.; Huang, J.; Yang, F. A Computation Offloading Algorithm Based on Game Theory for Vehicular Edge Networks. In Proceedings of the IEEE International Conference on Communications (ICC), Kansas City, KS, USA, 20–24 May 2018; pp. 1–6. [Google Scholar]
- Mazza, D.; Tarchi, D.; Corazza, G. A partial offloading technique for wireless mobile cloud computing in smart cities. In Proceedings of the European Conference on Networks and Communications (EuCNC), Bologna, Italy, 23–26 June 2014; pp. 1–5. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Definition |
|---|---|
| m | PM ID |
| k | Node ID, including MEC server |
| t | Time t |
| M | The number of PM |
| Queue k of vehicle or MEC in time t | |
| Workload of PM m in time t | |
| The size of task that arrives at queue k in time t | |
| Computation capability of computing node k | |
| Input data of PM m at time t | |
| transmission rate between PM m and node k | |
| Execution time of task m on node k | |
| Energy consumption of task m on node k | |
| Positional distance between vehicle m and BS | |
| Positional distance between vehicles | |
| Transmission bandwidth between vehicles | |
| Transmission bandwidth between vehicle and BS | |
| V | A weight control parameter |
| Data transmission power of vehicle | |
| Computation power of vehicle | |
| Idle power of vehicles | |
| Noise power |
| Parameter Name | Value |
|---|---|
| Number of PMs | M = 5 |
| Data transmission power | W |
| Computation power | W |
| Idle power | = 0.001 W |
| The distance between adjacent vehicles | 8 m |
| V2V communication bandwidth | MHz |
| V2I communication bandwidth | MHz |
| Noise power density | dBm/Hz |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, T.; Hu, Y.; Shen, B.; Chen, Q. Task Offloading Based on Lyapunov Optimization for MEC-Assisted Vehicular Platooning Networks. Sensors 2019, 19, 4974. https://doi.org/10.3390/s19224974
Cui T, Hu Y, Shen B, Chen Q. Task Offloading Based on Lyapunov Optimization for MEC-Assisted Vehicular Platooning Networks. Sensors. 2019; 19(22):4974. https://doi.org/10.3390/s19224974
Chicago/Turabian StyleCui, Taiping, Yuyu Hu, Bin Shen, and Qianbin Chen. 2019. "Task Offloading Based on Lyapunov Optimization for MEC-Assisted Vehicular Platooning Networks" Sensors 19, no. 22: 4974. https://doi.org/10.3390/s19224974
APA StyleCui, T., Hu, Y., Shen, B., & Chen, Q. (2019). Task Offloading Based on Lyapunov Optimization for MEC-Assisted Vehicular Platooning Networks. Sensors, 19(22), 4974. https://doi.org/10.3390/s19224974