Actuator Fault Detection and Fault-Tolerant Control for Hexacopter




Abstract
1. Introduction
1.1. Related Review
1.2. Main Contributions
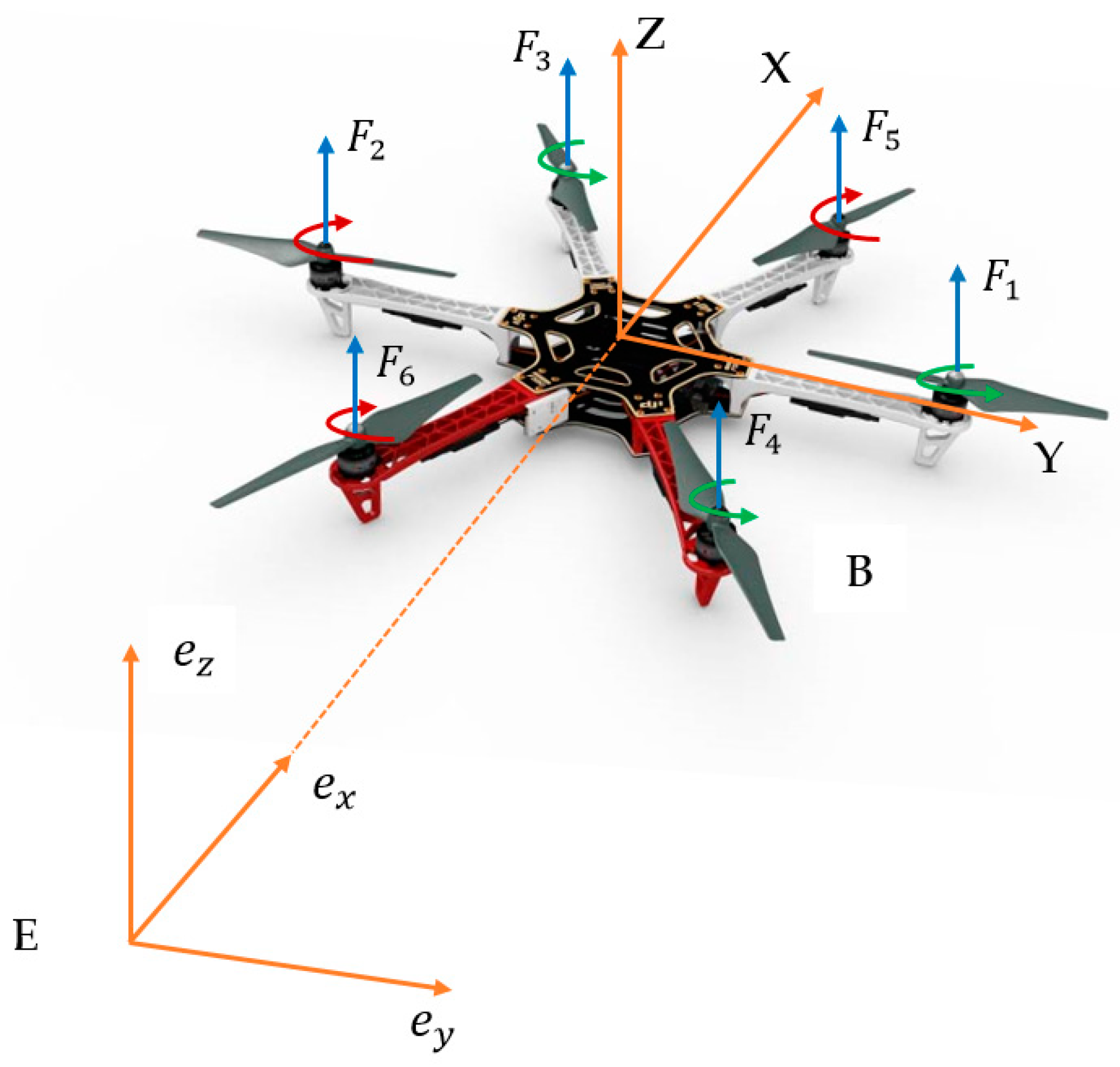
2. Mathematical Model of a Hexacopter
3. Attitude and Altitude Controller Design
3.1. Attitude Controller Design
3.2. Altitude Controller Design
4. Fault Detection and Fault-Tolerant Control System
4.1. Residual Generation
4.2. Residual Validation
4.3. Fault Isolation and Fault-Tolerant Control
5. Experimental Results
5.1. Experimental Setup
5.2. Results
5.2.1. Partial Loss in Actuator 2
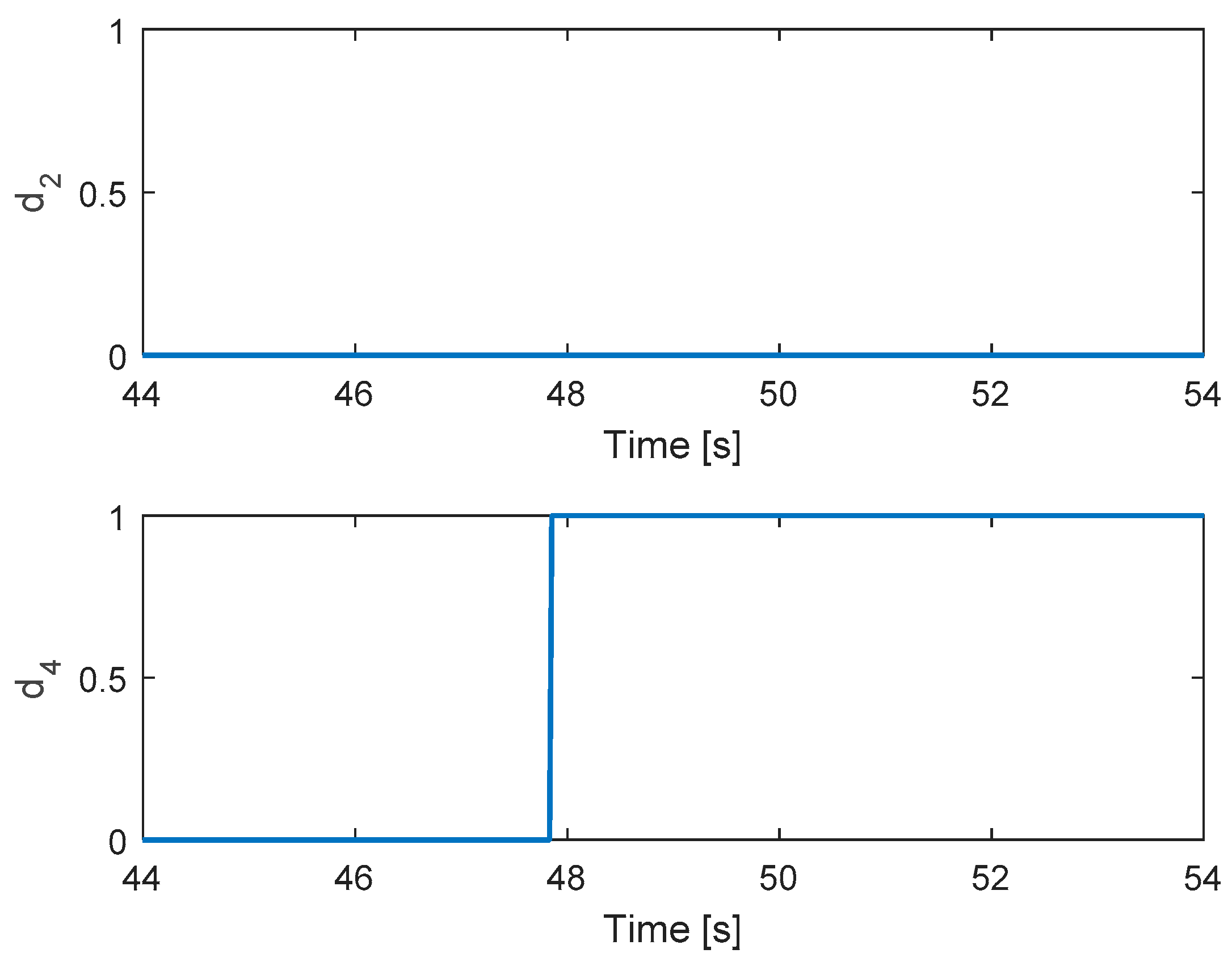
5.2.2. Complete Loss in Actuator 4
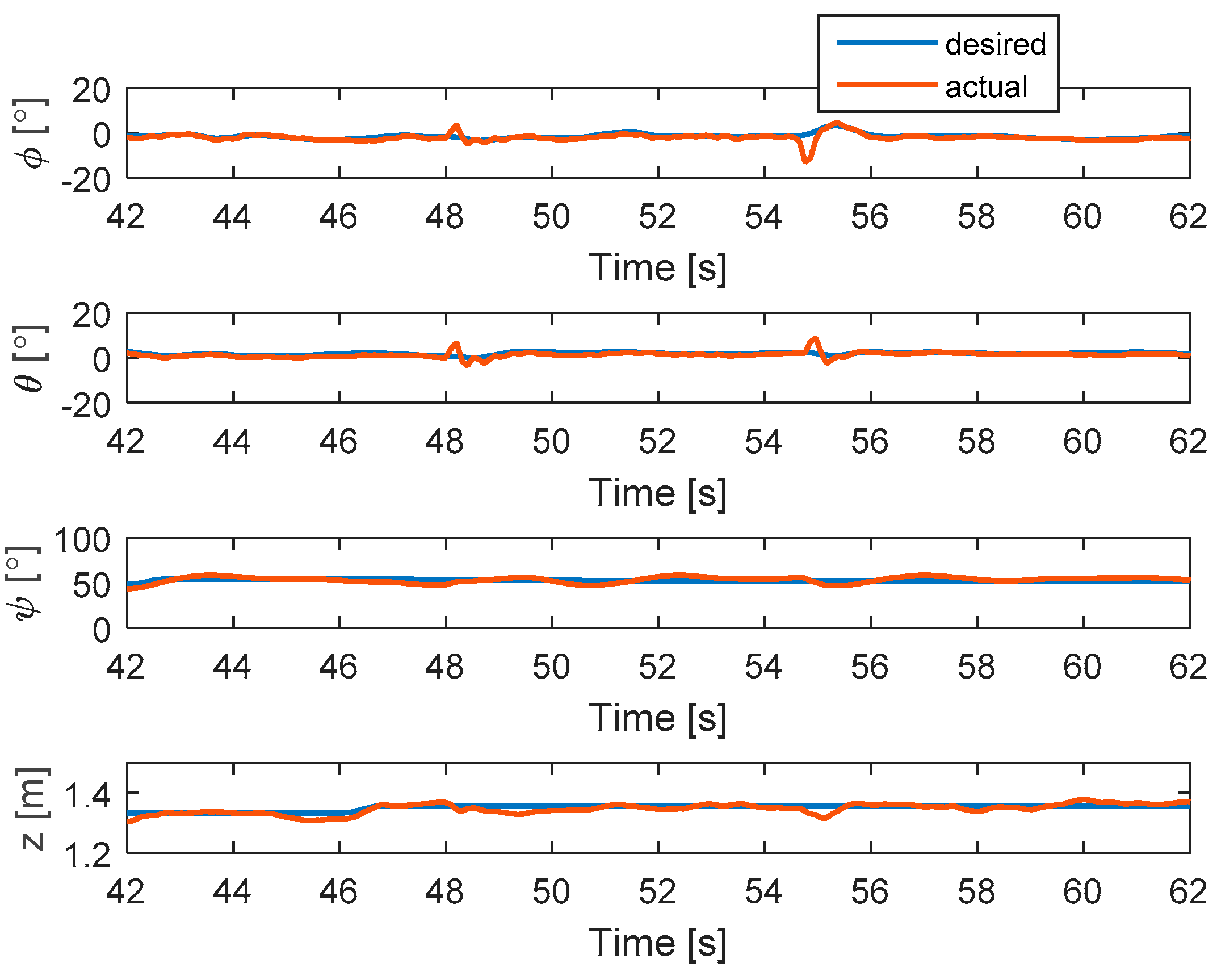
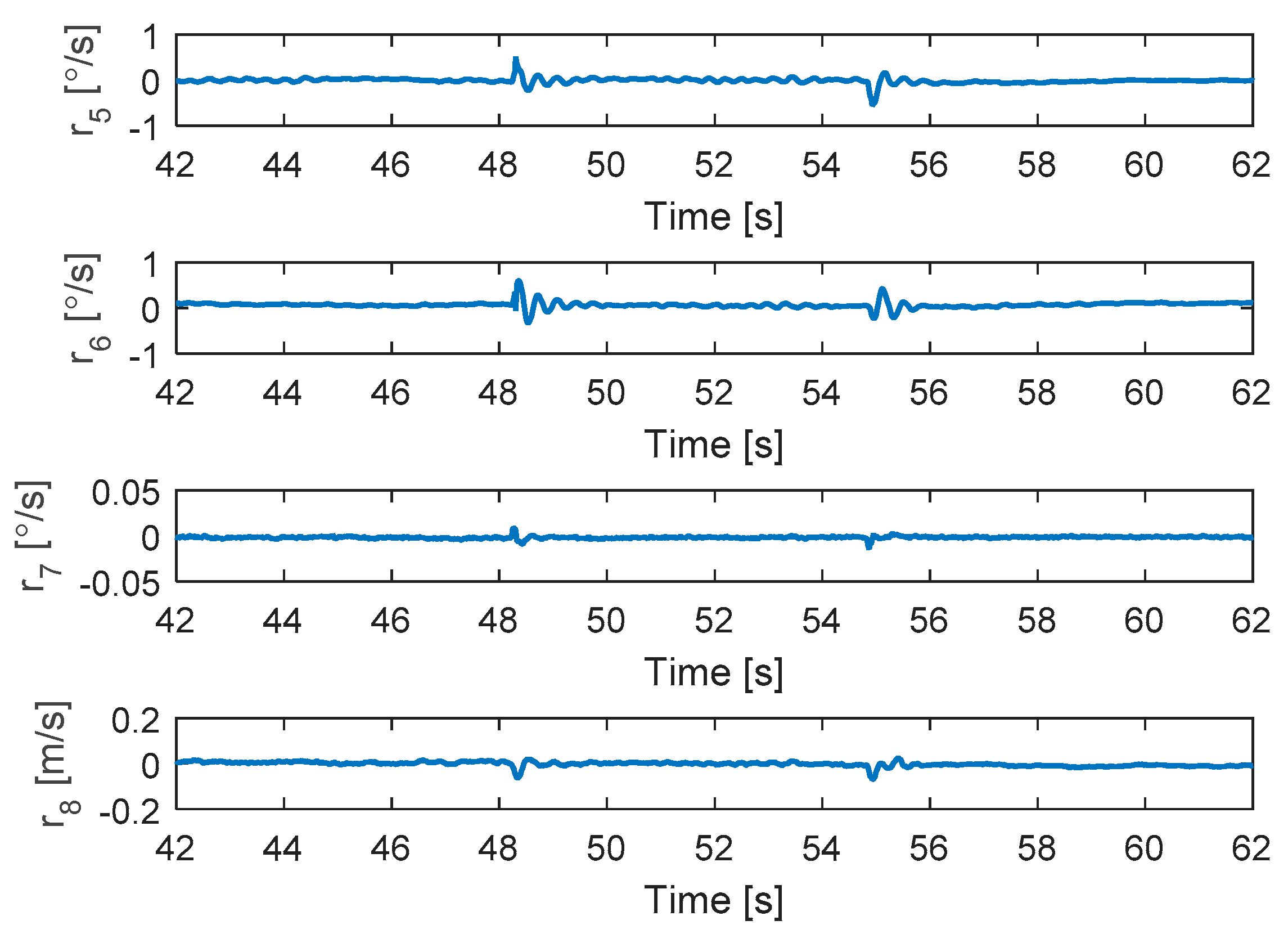
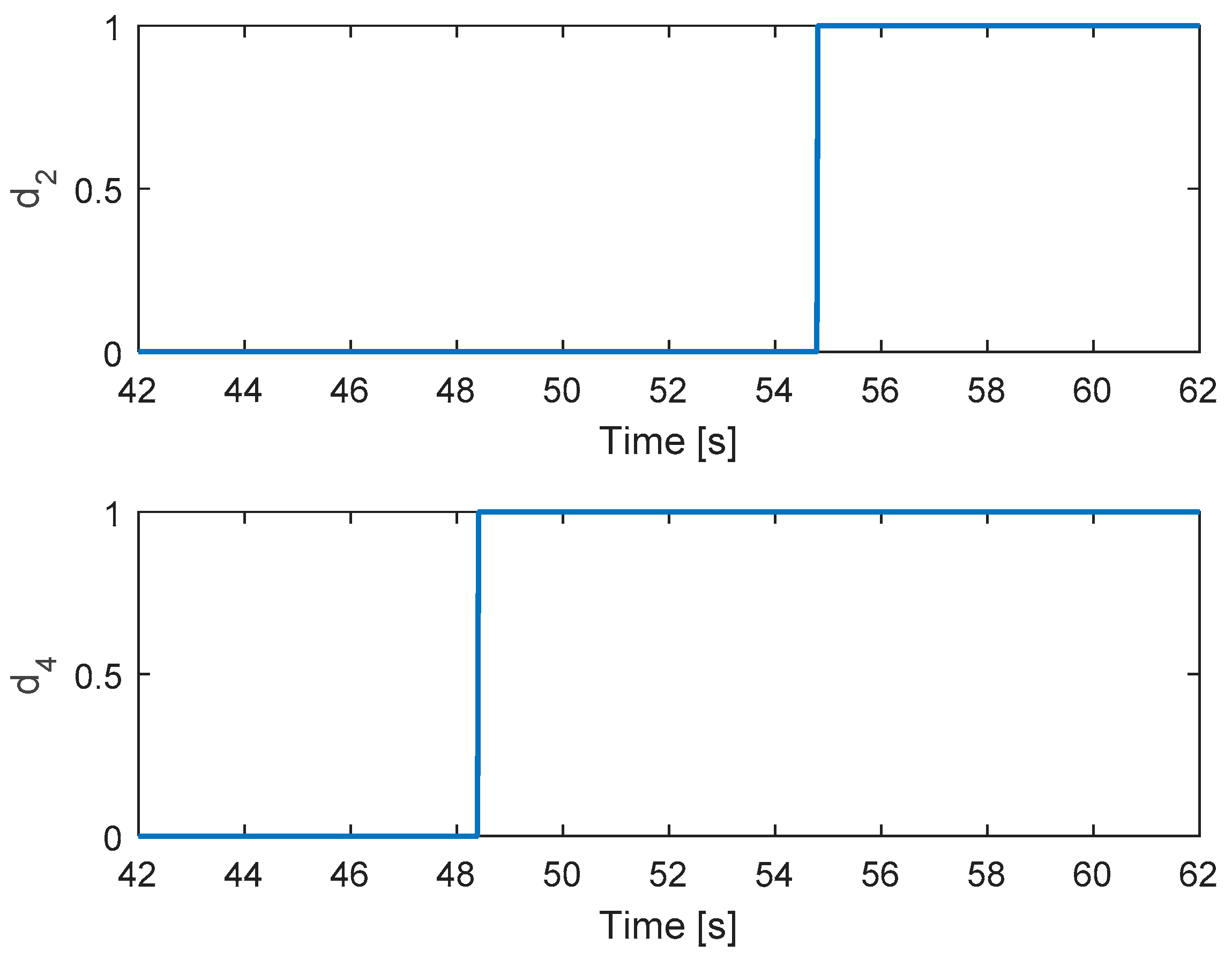
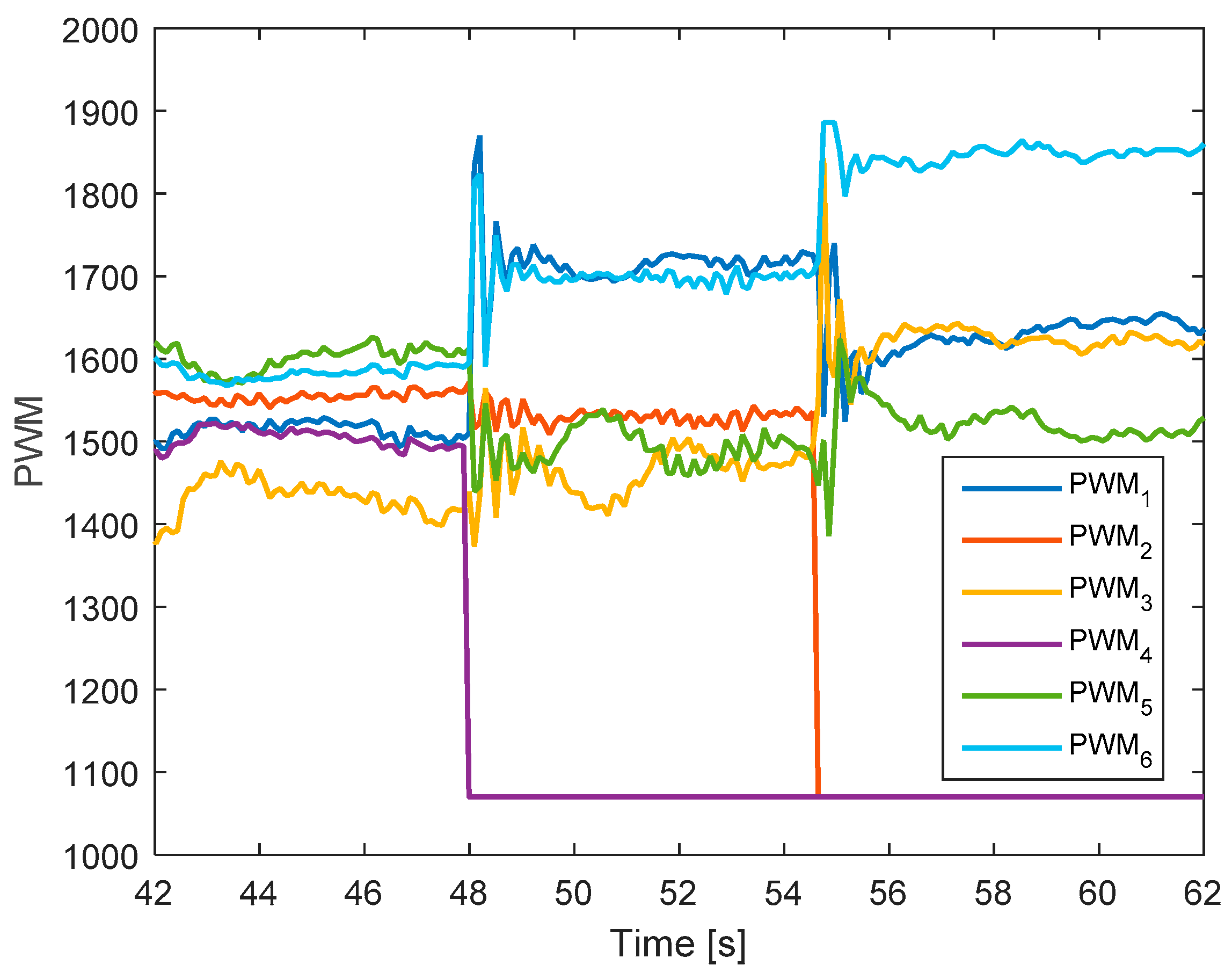
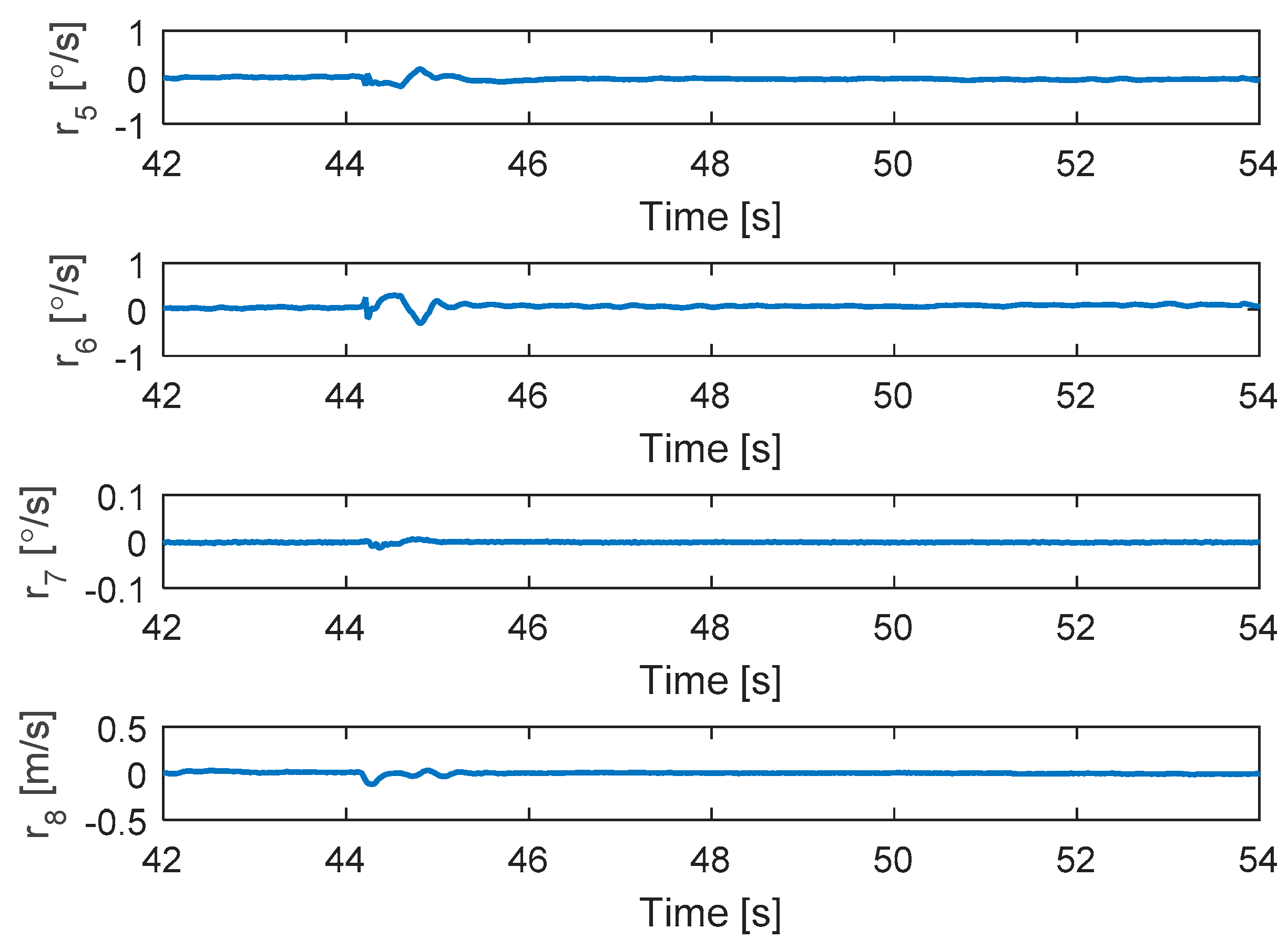
5.2.3. Complete Loss of Two Motors in Sequence
5.2.4. Complete Loss in Two Motors at the Same Time
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhao, W.; Go, T.H. Quadcopter formation flight control combining MPC and robust feedback linearization. J. Frankl. Inst. 2014, 351, 1335–1355. [Google Scholar] [CrossRef]
- Mahmood, A.; Kim, Y. Decentralized formation flight control of quadcopters using robust feedback linearization. J. Frankl. Inst. 2017, 354, 852–871. [Google Scholar] [CrossRef]
- Yang, S.; Ying, J.; Lu, Y.; Li, Z. Precise quadrotor autonomous landing with SRUKF vision perception. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar]
- Shakernia, O.; Ma, Y.; Koo, T.J.; Sastry, S. Landing an unmanned air vehicle: vision based motion estimation and nonlinear control. Asian J. Control 1999, 1, 128–145. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R.W. Trajectory tracking for unmanned air vehicles with velocity and heading rate constraint. IEEE Trans. Control Syst. Technol. 2004, 12, 12–706. [Google Scholar] [CrossRef]
- Bonna, R.; Camino, J.F. Trajectory Tracking Control of a Quadcopter Using Feedback Linearization. In Proceedings of the XVII International Symposium on Dynamic Problems of Mechanics, Natal- Rio Grande Do Norte, Brazil, 22–27 February 2015. [Google Scholar]
- Al-Naji, A.; Perera, A.G.; Mohammed, S.L.; Chahl, J. Life Signs Detector Using a Drone in Disaster Zones. Remote Sens. 2019, 11, 2441. [Google Scholar] [CrossRef]
- Lippitt, C.D.; Zhang, S. The impact of small unmanned airborne platforms on passive optical remote sensing: A conceptual perspective. Int. J. Remote Sens. 2018, 39, 4852–4868. [Google Scholar] [CrossRef]
- Burdziakowski, P. UAV in Todays Photogrammetry-Application Areas and Challenges. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM, Albena, Bulgaria, 24 August–2 September 2018. [Google Scholar]
- Burdziakowski, P. UAV Design and Construction for Real Time Photogrammetry and Visual Navigation. In Proceedings of the Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Poland, 21–23 June 2018. [Google Scholar]
- Lanzon, A.; Freddi, A.; Longhi, S. Flight Control of a Quadrotor Vehicle Subsequent to a Rotor Failure. J. Guid. Control Dyn. 2014, 37, 580–591. [Google Scholar] [CrossRef]
- Kacimi, A.; Mokhtari, A.; Kouadri, B. Sliding mode control based on adaptive backstepping approach for quadrotor unmanned aerial vehicle. Przegląd Elektrotechniczny 2012, 88, 188–193. [Google Scholar]
- Sharifi, F.; Mirzaei, M.; Gordon, B.W.; Zhang, Y.M. Fault tolerant control of a quadrotor UAV using sliding mode control. In Proceedings of the Conference on Control and Fault Tolerant Systems, Nice, France, 6–7 October 2010; pp. 239–244. [Google Scholar]
- Hu, Q.; Xiao, B. Adaptive fault tolerant control using integral sliding mode strategy with application to flexible spacescraft. Int. J. Syst. Sci. 2013, 44, 2273–2286. [Google Scholar] [CrossRef]
- Barghandan, S.; Badamchizadeh, M.A.; Jahed-Motlagh, M.R. Improve Adaptive Fuzzy Sliding Mode Controller for Robust Fault Tolerant of a Quadrotor. Int. J. Control Autom. Syst. 2017, 15, 427–441. [Google Scholar] [CrossRef]
- Yang, H.; Jiang, B.; Zhang, K. Direct self-repairing control of the quadrotor helicopter based on adaptive sliding mode control technique. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014. [Google Scholar]
- He, J.; Qi, R.; Jiang, B.; Qian, J. Adaptive output feedback fault tolerant control design for hypersonic flight vehicles. J. Frankl. Inst. 2015, 352, 1811–1835. [Google Scholar] [CrossRef]
- Merheb, A.-R.; Noura, H.; Bateman, F. Emergency control of AR Drone Quadrotor UAV suffering a total loss of one rotor. IEEE/ASME Trans. Mechatron. 2017, 22, 961–971. [Google Scholar] [CrossRef]
- Lippiello, V.; Ruggiero, F.; Serra, D. Emergency landing for a quadrotor in case of a propeller failure: A backstepping approach. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014. [Google Scholar]
- Mueller, M.W.; Andrea, R.D. Stability and control of a quadrocopter despite the complete loss of one, two, or three propellers. In Proceedings of the IEEE International Conference on Robotics and Automation, Hong Kong, China, 31 May–7 June 2014. [Google Scholar]
- Schneider, T.; Ducard, G.; Konrad, R.; Pascal, S. Fault-tolerant Control Allocation for Multirotor Helicopters Using Parametric Programming. In Proceedings of the International Micro Air Vehicle Conference and Flight Competition (IMAV), Braunschweig, Germany, 3–6 July 2012. [Google Scholar]
- Falconi, G.P.; Marvakov, V.A.; Holzapfel, F. Fault Tolerant Control for a hexarotor system using incremental backstepping. In Proceedings of the IEEE Conference on Control Applications (CCA), Buenos Aires, Argentina, 19–22 September 2016. [Google Scholar]
- Lee, J.; Choi, H.S.; Shim, H. Fault Tolerant Control of Hexacopter for Actuator Faults using Time Delay Control Method. Int. J. Aeronaut. Space Sci. 2016, 17, 54–63. [Google Scholar] [CrossRef]
- Mazeh, H.; Saied, M.; Shraim, H.; Francis, C. Fault-tolerant control of an hexarotor unmanned aerial vehicle applying outdoor tests and experiments. Int. Fed. Autom. Control 2018, 51, 312–317. [Google Scholar] [CrossRef]
- Dong, W.; Gu, G.-Y.; Zhu, X.; Ding, H. Modeling and Control of a Quadrotor UAV with Aerodynamics Concepts. World Acad. Sci. Eng. Technol. 2013, 7, 901–906. [Google Scholar]
- Nguyen, N.P.; Hong, S.K. Fault Diagnosis and Fault-Tolerant Control Scheme for Quadcopter UAVs with a Total Loss of Actuator. Energies 2019, 12, 1139. [Google Scholar] [CrossRef]
- Chen, W.-H.; Balance, D.J.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 47, 932–938. [Google Scholar] [CrossRef]
- Cen, Z.; Noura, H.; Susilo, T.B.; Younes, Y.A. Robust fault diagnosis for quadrotor UAVs using adaptive Thau observer. J. Intell. Robot. Syst. 2014, 73, 573–588. [Google Scholar] [CrossRef]
- DJI F550 Frame. Available online: https://www.dji.com/kr/flame-wheel-arf/feature (accessed on 22 October 2019).
- Pixhawk2. Available online: https://docs.px4.io/v1.9.0/en/flight_controller/pixhawk-2.html (accessed on 22 October 2019).
- PWM. Available online: http://ardupilot.org/dev/docs/learning-ardupilot-rc-input-output.html (accessed on 22 October 2019).
- Building C++ Program from Eclipse Software. Available online: http://ardupilot.org/dev/docs/editing-the-code-with-eclipse.html (accessed on 7 October 2019).
- Mission Planner. Available online: http://ardupilot.org/planner (accessed on 22 October 2019).
- Telemetry. Available online: http://ardupilot.org/copter/docs/common-telemetry-landingpage.html (accessed on 22 October 2019).



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor Failure | Controllable | ||||
|---|---|---|---|---|---|
| 0 | Yes | ||||
| 0 | Yes | ||||
| No | |||||
| Yes | |||||
| No | |||||
| Yes |
| Motor Failure | Controllable | ||||
|---|---|---|---|---|---|
| 0 | 0 | 0 | Yes | ||
| No | |||||
| No | |||||
| No | |||||
| Yes | |||||
| No | |||||
| Yes | |||||
| No | |||||
| No | |||||
| No | |||||
| 0 | 0 | No | |||
| No | |||||
| No | |||||
| 0 | 0 | No | |||
| No |
| Parameter | Description | Value |
|---|---|---|
| Arm length | m | |
| Thrust coefficient | N/m2 | |
| Drag coefficient | ||
| Mass | kg | |
| Moments of inertia | kg·m2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, N.P.; Xuan Mung, N.; Hong, S.K. Actuator Fault Detection and Fault-Tolerant Control for Hexacopter. Sensors 2019, 19, 4721. https://doi.org/10.3390/s19214721
Nguyen NP, Xuan Mung N, Hong SK. Actuator Fault Detection and Fault-Tolerant Control for Hexacopter. Sensors. 2019; 19(21):4721. https://doi.org/10.3390/s19214721
Chicago/Turabian StyleNguyen, Ngoc Phi, Nguyen Xuan Mung, and Sung Kyung Hong. 2019. "Actuator Fault Detection and Fault-Tolerant Control for Hexacopter" Sensors 19, no. 21: 4721. https://doi.org/10.3390/s19214721
APA StyleNguyen, N. P., Xuan Mung, N., & Hong, S. K. (2019). Actuator Fault Detection and Fault-Tolerant Control for Hexacopter. Sensors, 19(21), 4721. https://doi.org/10.3390/s19214721