Piezoelectric Micromachined Ultrasonic Transducers with a Cost-Effective Bottom-Up Fabrication Scheme for Millimeter-Scale Range Finding


Abstract
1. Introduction
2. PMUT Design and Finite Element Analysis (FEA) Simulation
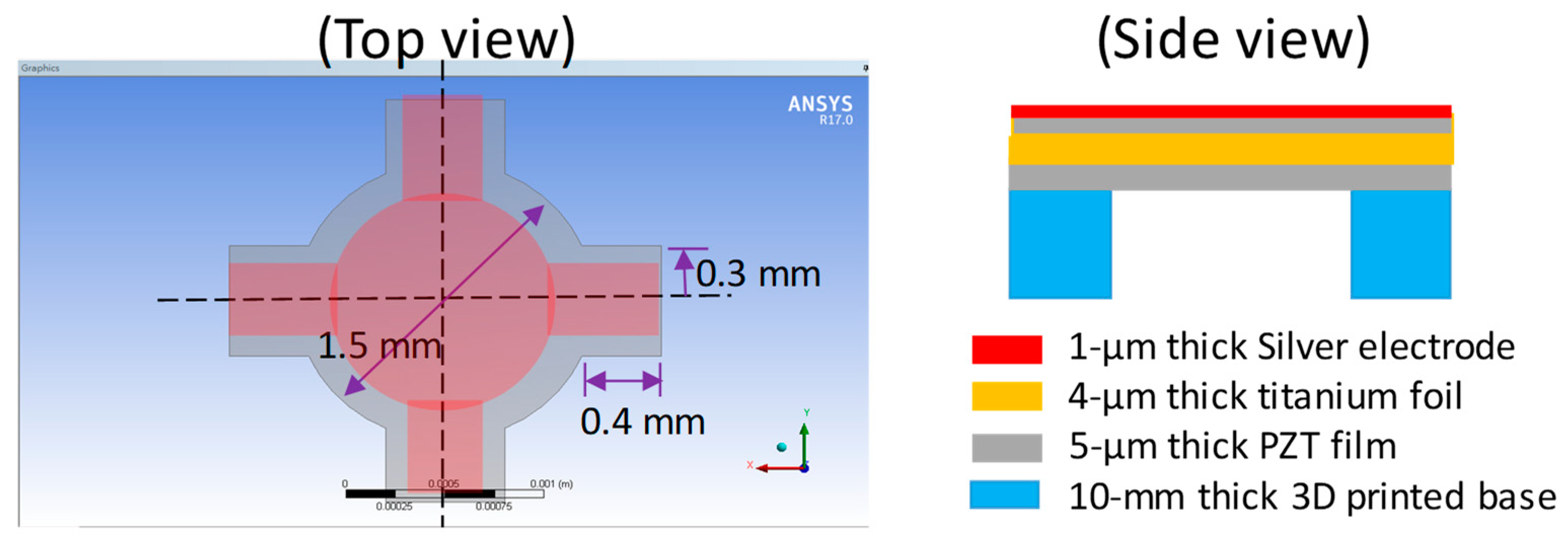
2.1. Structural Design of the PMUT
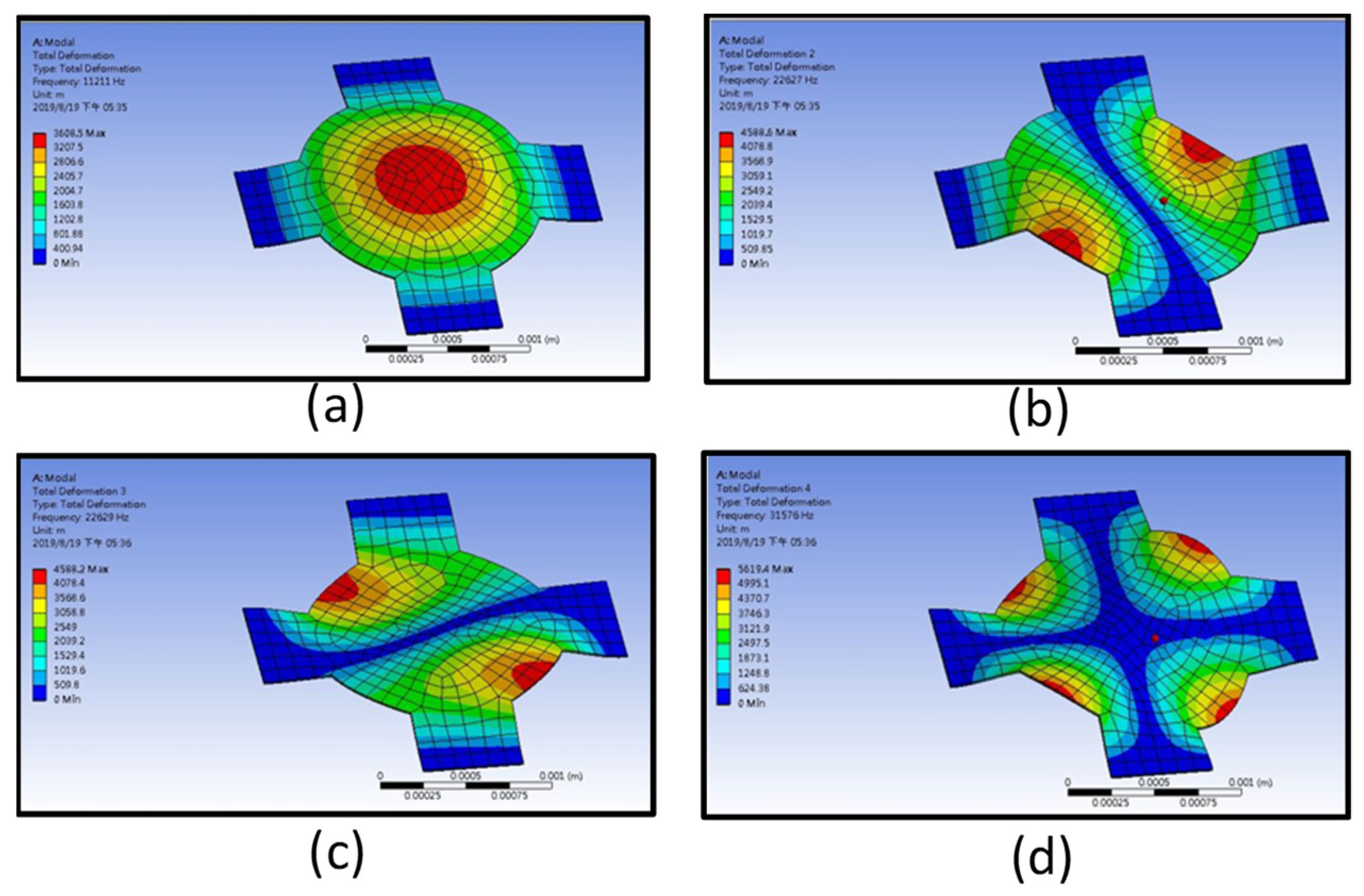
2.2. ANSYS Simulation
3. Device Fabrication
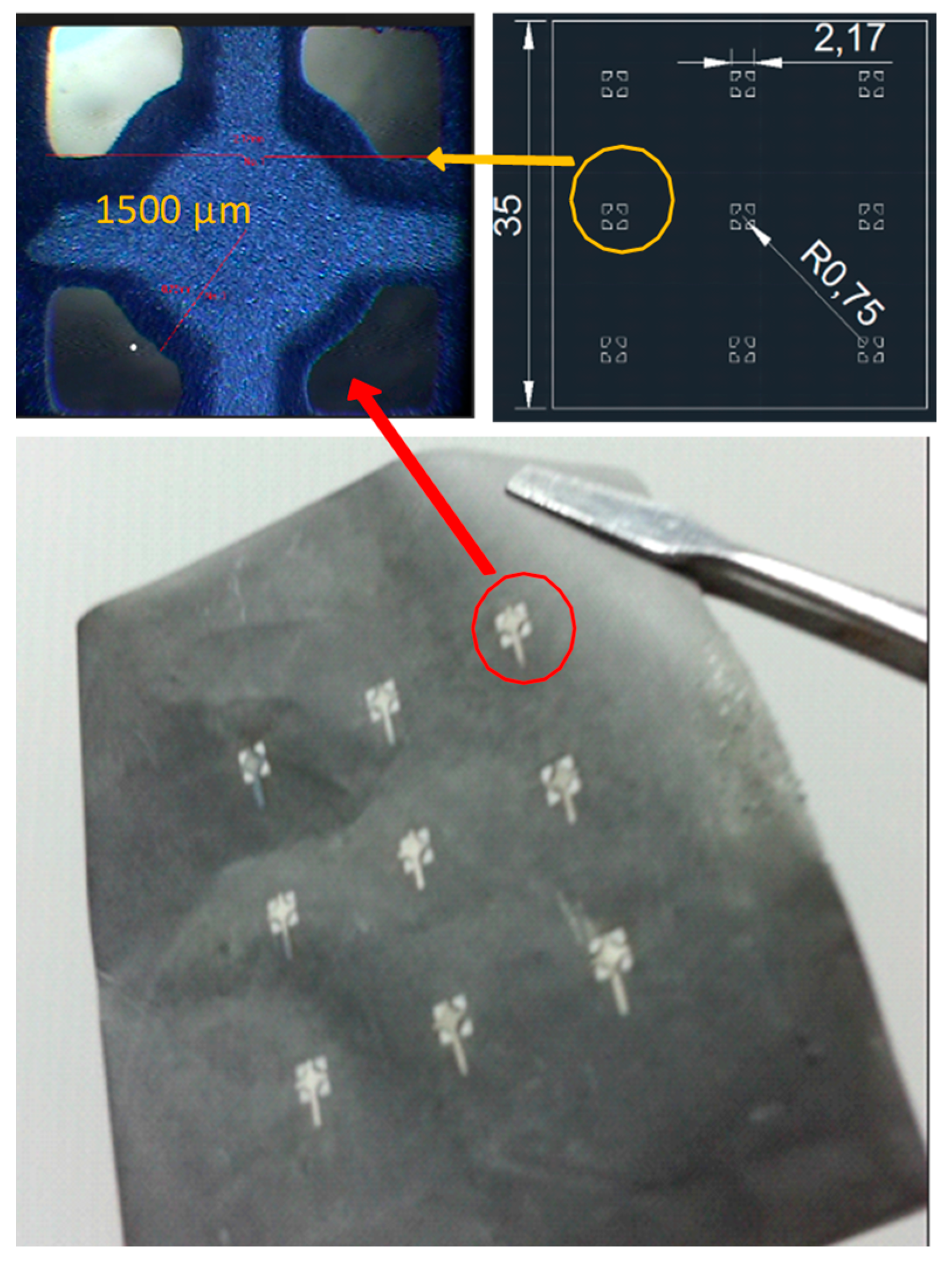
3.1. Realization of the Foil Substrate with Designed Patterns
3.2. Hydrothermal Growth of the PZT Film
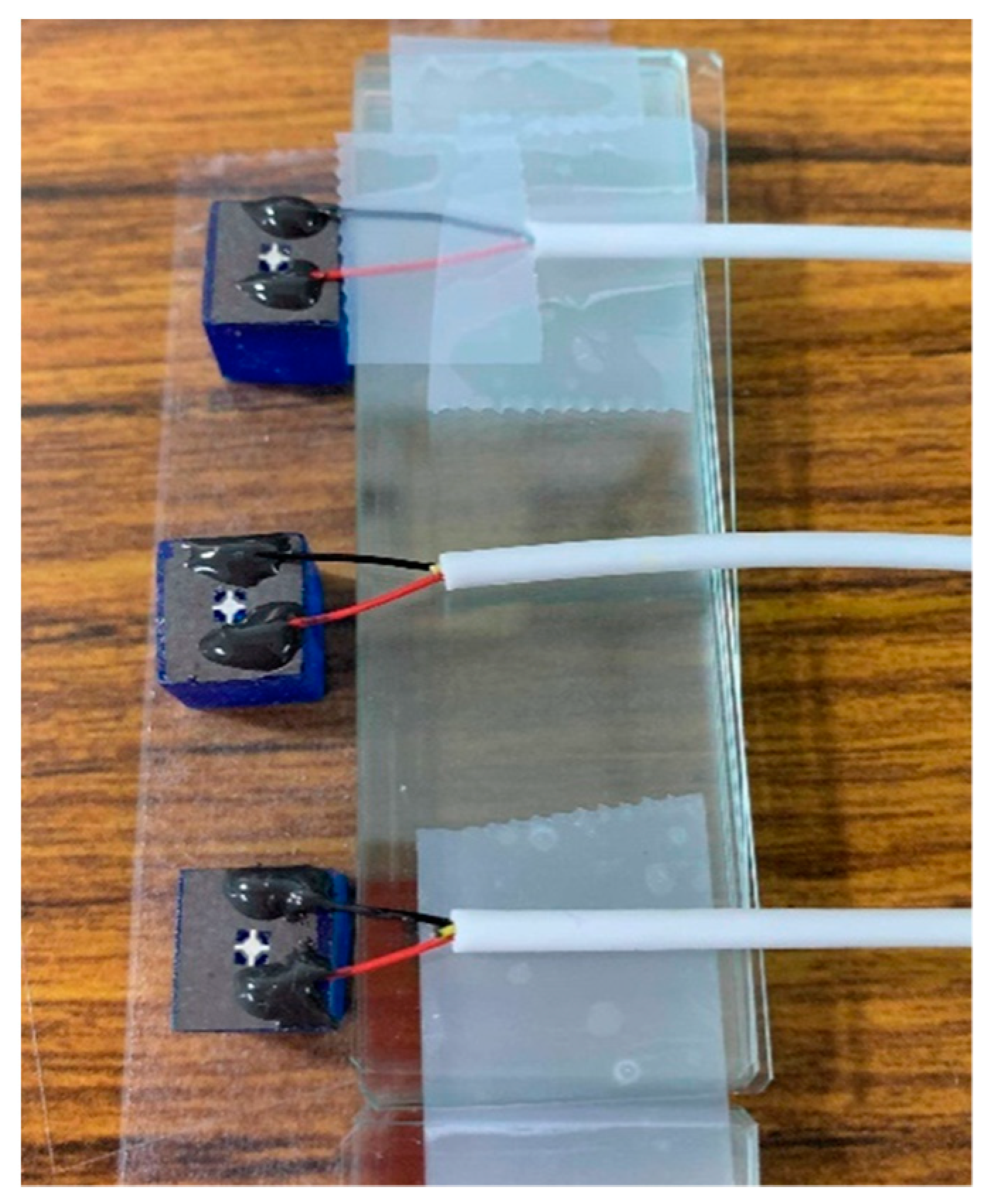
3.3. From the PZT Foil Element to the PMUT Device
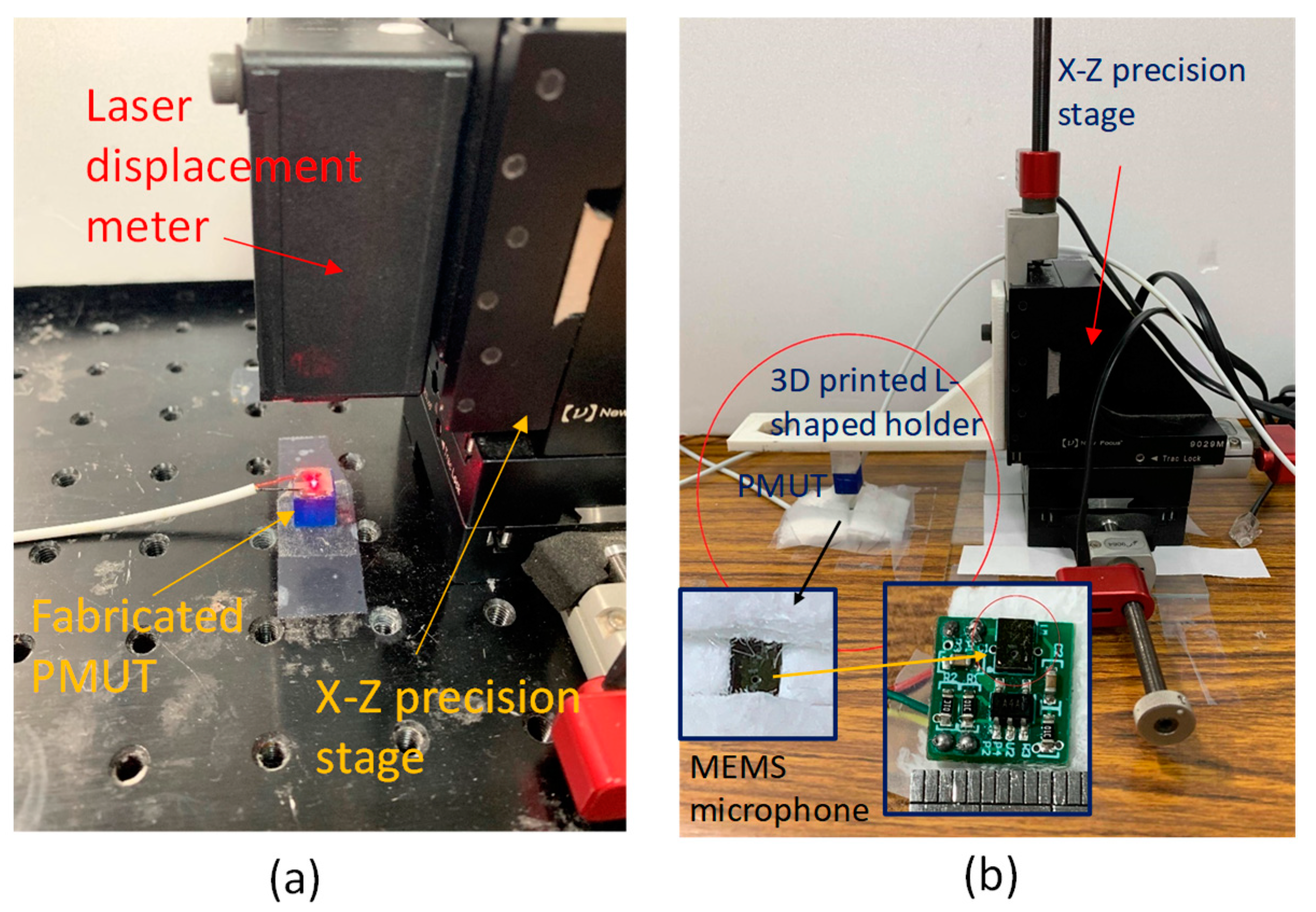
4. Experimental Setup
4.1. Characterization of the Piezoelectric Foil Response
4.2. Characterization of the Fabricated PMUT Pairing with the MEMS Microphone as a Rangefinder
5. Results and Discussion
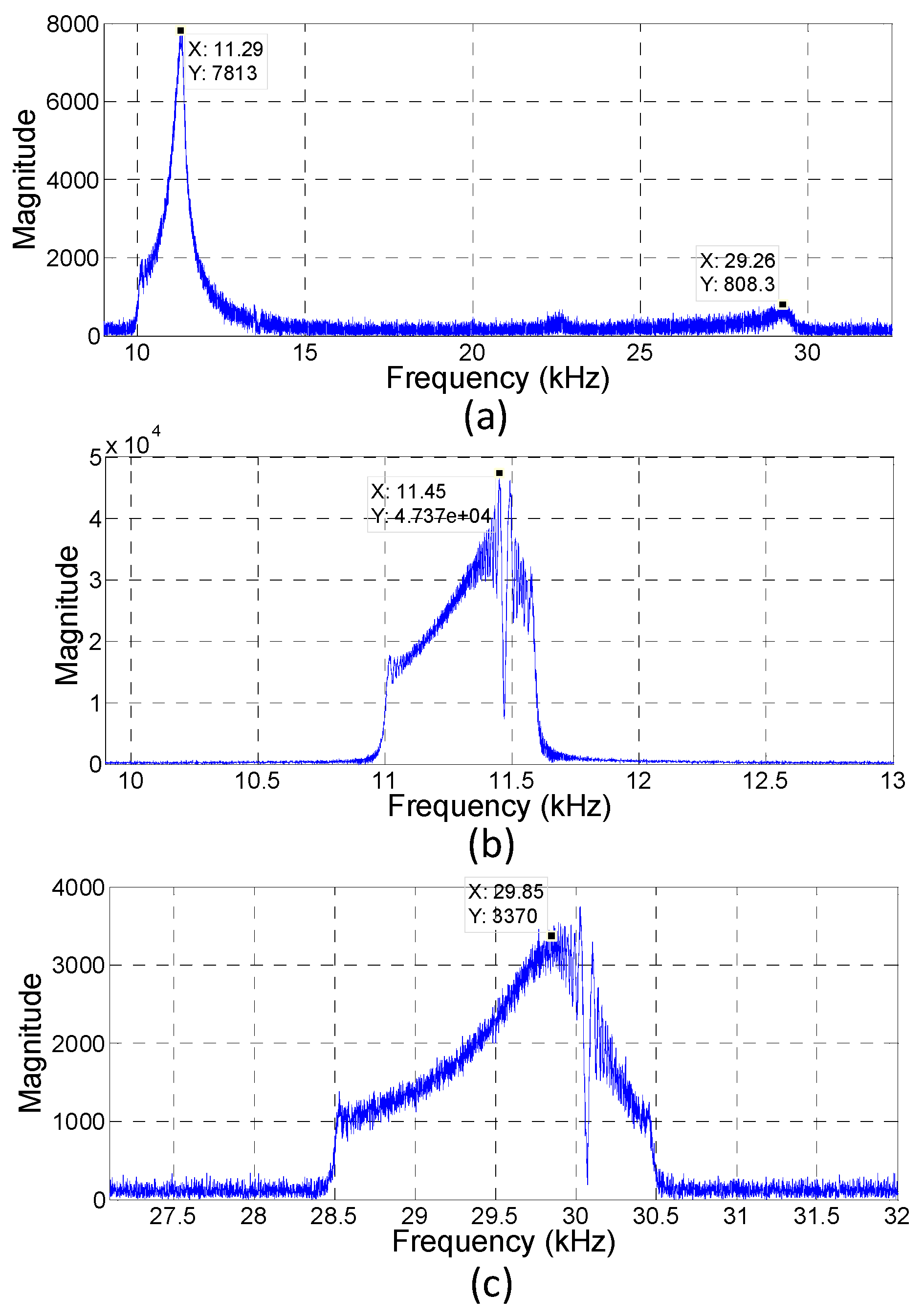
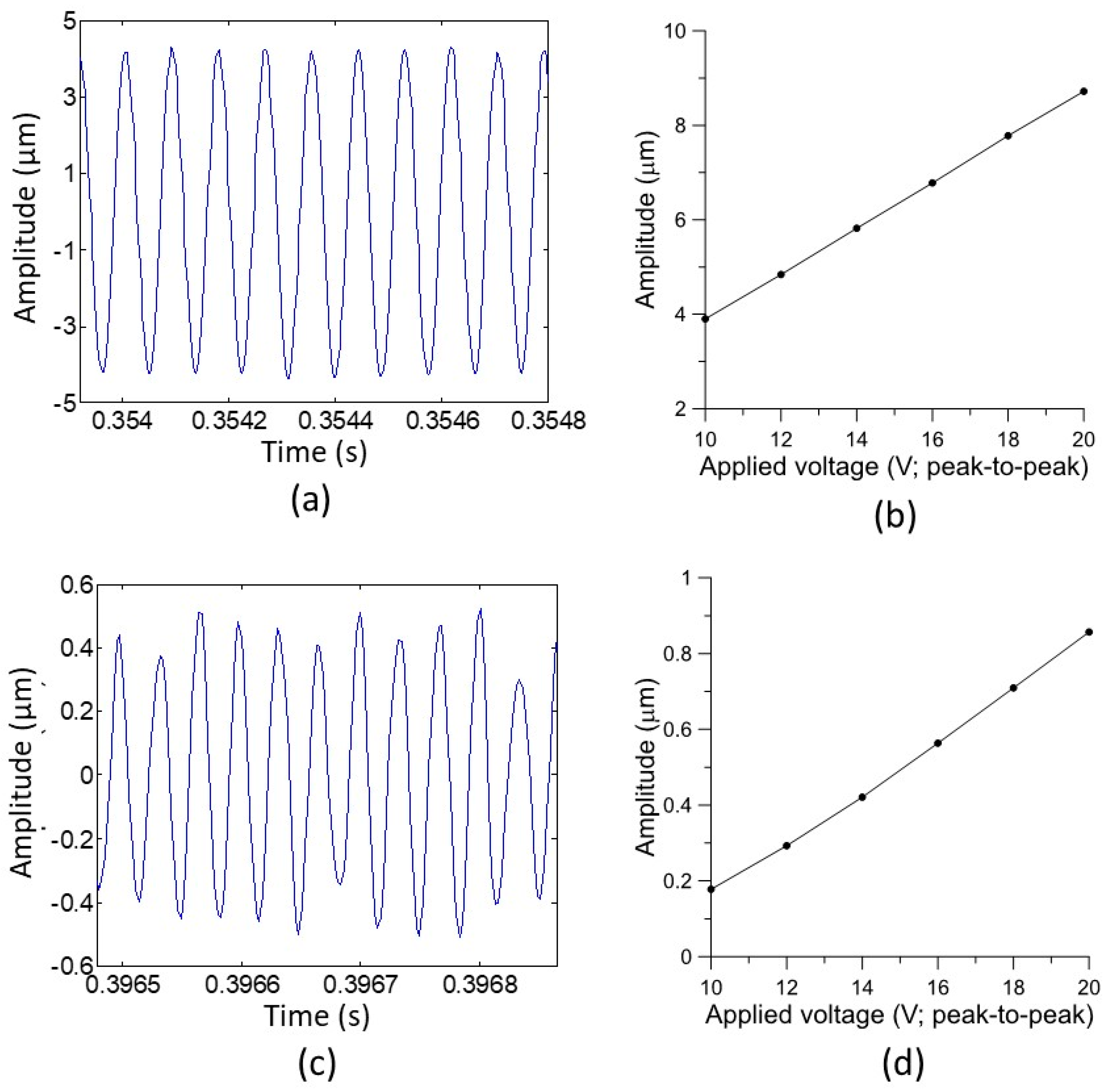
5.1. Frequency and Displacement Response of the Fabricated PMUT
5.2. Displacement of Piezoelectric Foil at Resonance for a Varied Input Voltage
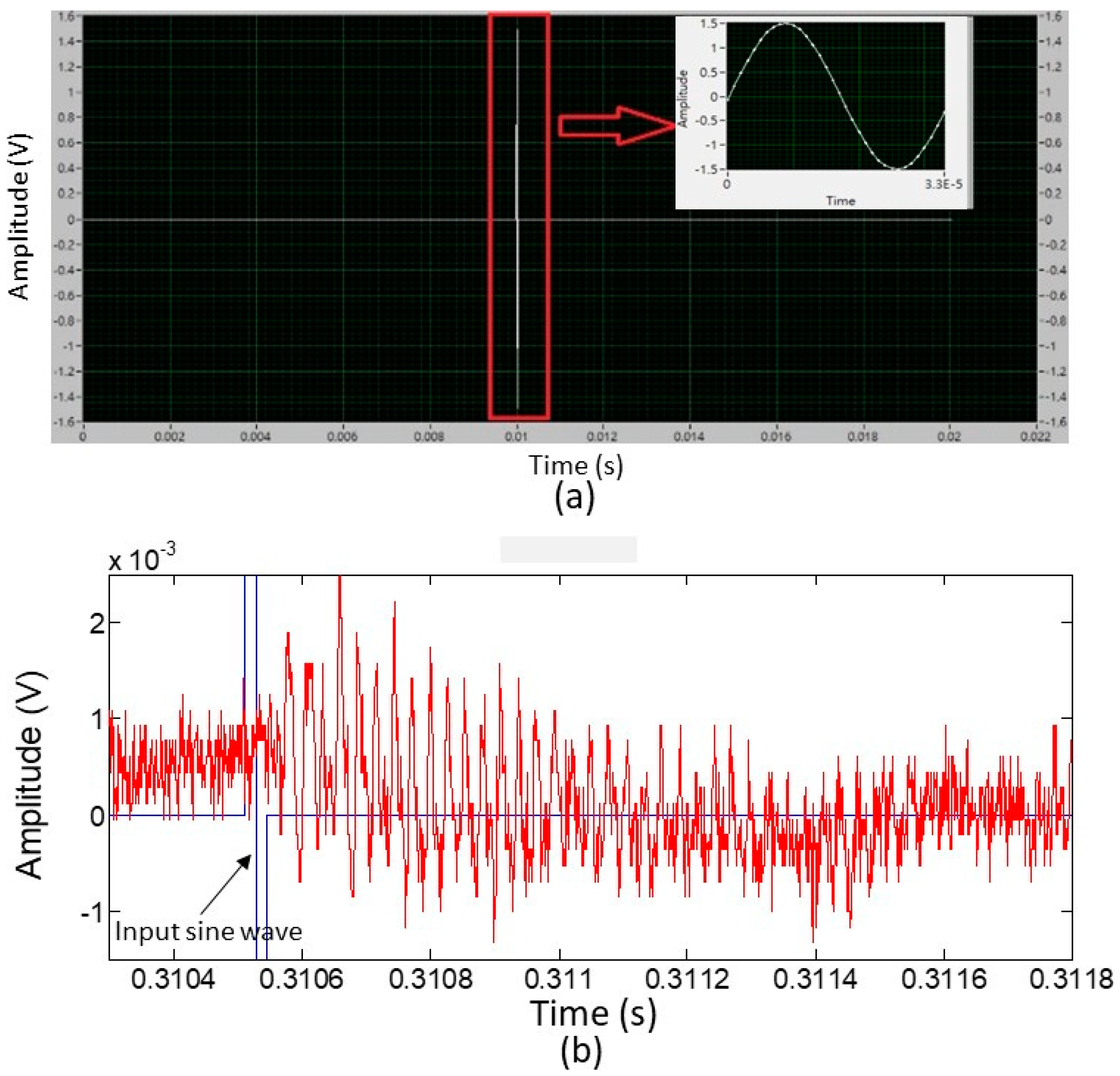
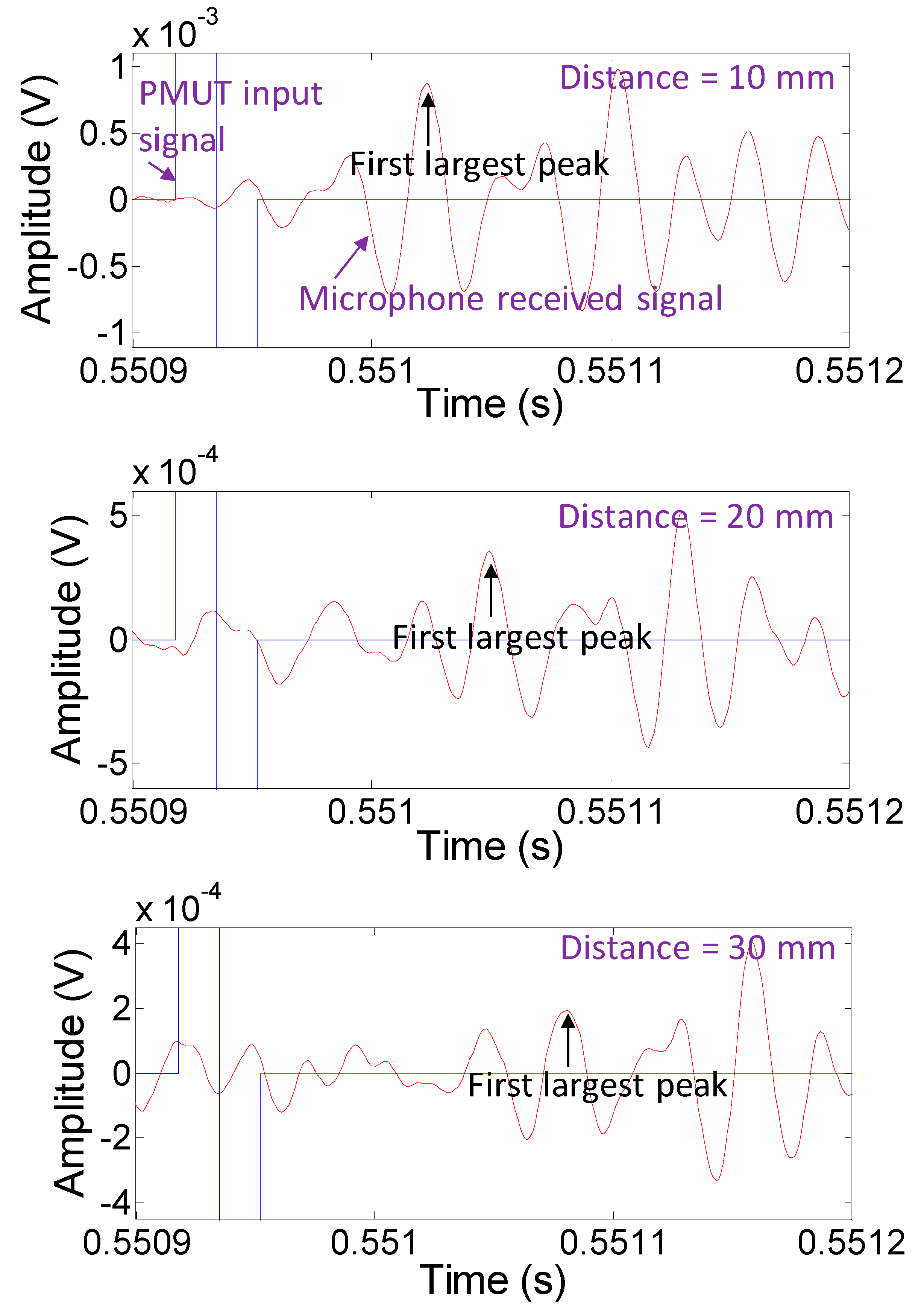
5.3. The Raw Data of the Received Signals in the Microphone Module
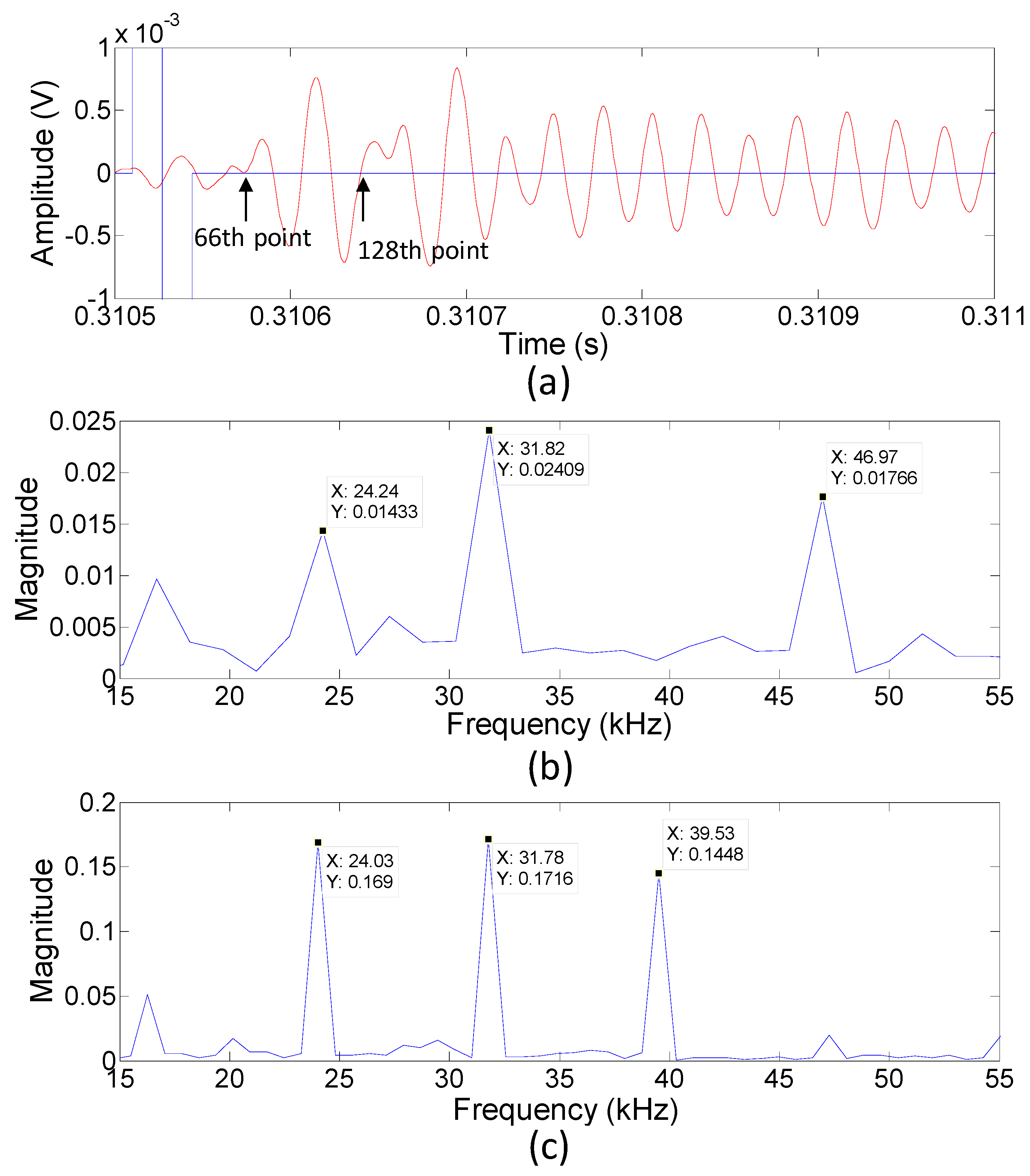
5.4. Extracting the Representative Data Pattern from the Received Signal
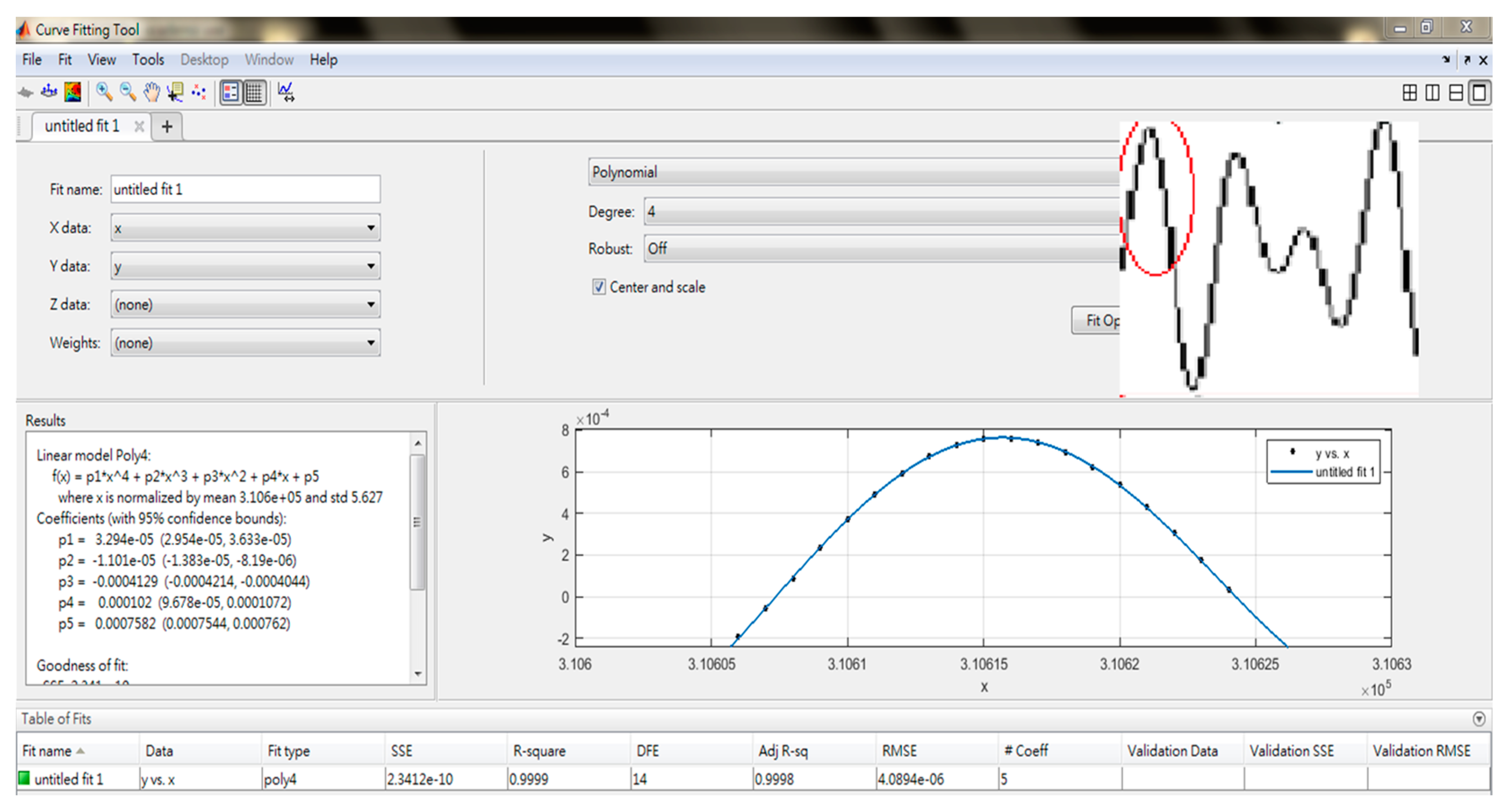
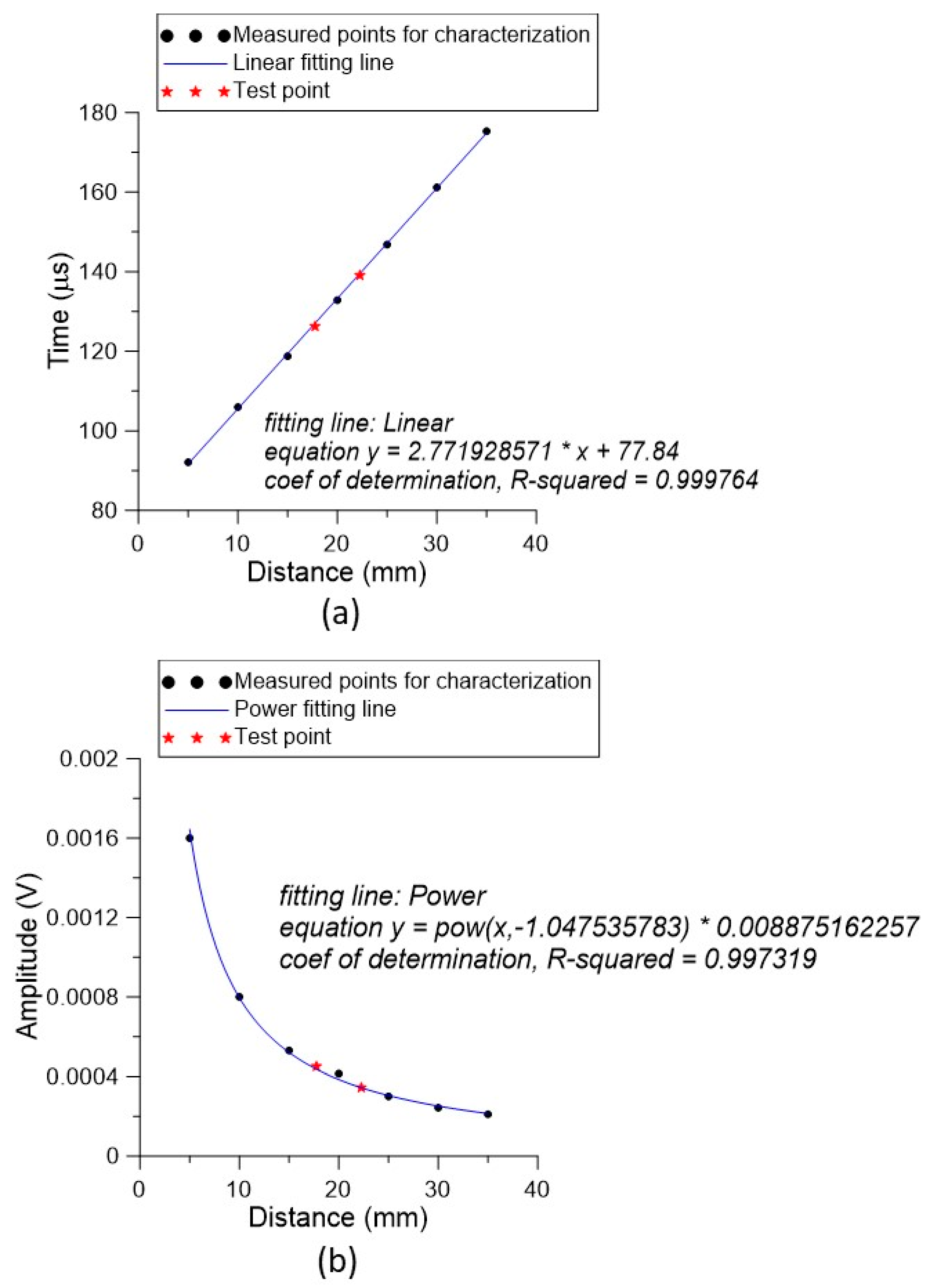
5.5. Increasing the Accuracy of the Range-Finding Measurement
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Baresch, D.; Thomas, J.L.; Marchiano, R. Observation of a single-beam gradient force acoustical trap for elastic particles: Acoustical tweezers. Phys. Rev. Lett. 2016, 116, 024301. [Google Scholar] [CrossRef] [PubMed]
- Shimoyama, T.; Nanri, M.; Murakami, Y.; Tamakawa, K. Maritime Infrastructure Security Using Underwater Sonar Systems. Hitachi Rev. 2013, 62, 214–218. [Google Scholar]
- Feng, G.H.; Liu, W.F. A spherically-shaped PZT thin film ultrasonic transducer with an acoustic impedance gradient matching layer based on a micromachined periodically structured flexible substrate. Sensors 2013, 13, 13543–13559. [Google Scholar] [CrossRef]
- Hull, J.B. Non-Destructive Testing; Macmillan International Higher Education: London, UK, 2015. [Google Scholar]
- Qiu, Y.; Gigliotti, J.V.; Wallace, M.; Griggio, F.; Demore, C.E.M.; Cochran, S.; Trolier-McKinstry, S. Piezoelectric micromachined ultrasound transducer (PMUT) arrays for integrated sensing, actuation and imaging. Sensors 2015, 15, 8020–8041. [Google Scholar] [CrossRef] [PubMed]
- Koval, L.; Vaňuš, J.; Bilík, P. Distance Measuring by Ultrasonic Sensor. IFAC-PapersOnLine 2016, 49, 153–158. [Google Scholar] [CrossRef]
- Zhou, Z.; Yoshida, S.; Tanaka, S. Monocrystalline PMNN-PZT thin film ultrasonic rangefinder with 2 m range at 1 volt drive. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 167–170. [Google Scholar]
- Liu, X.; Chen, X.; Le, X.; Wang, Y.; Wu, C.; Xie, J. Reducing ring-down time of pMUTs with phase shift of driving waveform. Sens. Actuators A 2018, 281, 100–107. [Google Scholar] [CrossRef]
- Wong, L.L.P.; Na, S.; Albert, I.C.; Li, Z.; Macecek, M.; Yeow, J.T.W. A feasibility study of piezoelectric micromachined ultrasonic transducers fabrication using a multi-user MEMS process. Sens. Actuators A 2016, 247, 430–439. [Google Scholar] [CrossRef]
- Ge, C.; Cretu, E. Design and fabrication of SU-8 CMUT arrays through grayscale lithography. Sens. Actuators A 2018, 280, 368–375. [Google Scholar] [CrossRef]
- Krenkel, M.; Stolz, M.; Koch, S.G.; Kupnik, M. CMUT with mechanically coupled plate actuators for low frequencies. J. Micromech. Microeng. 2019, 29, 044001. [Google Scholar] [CrossRef]
- Li, Z.; Na, S.; Chen, A.I.H.; Wong, L.L.P.; Sun, Z.; Liu, P.; Yeow, J.T.W. Optimization on benzocyclobutene-based CMUT fabrication with an inverse structure. Sens. Actuators A 2018, 281, 1–8. [Google Scholar] [CrossRef]
- Yildiz, F.; Matsunaga, T.; Haga, Y. Fabrication and Packaging of CMUT Using Low Temperature Co-Fired Ceramic. Micromachines 2018, 9, 553. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Zhou, Y.; Randles, A. Enhancement of the transmission of piezoelectric micromachined ultrasonic transducer with an isolation trench. J. Microelectromech. Syst. 2016, 25, 691–700. [Google Scholar] [CrossRef]
- Sammoura, F.; Smyth, K.; Kim, S.G. An equivalent network representation of a clamped bimorph piezoelectric micromachined ultrasonic transducer with circular and annular electrodes using matrix manipulation techniques. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 1989–2003. [Google Scholar] [CrossRef] [PubMed]
- Amar, A.B.; Cao, H.; Kouki, A.B. Modeling and process design optimization of a piezoelectric micromachined ultrasonic transducers (PMUT) using lumped elements parameters. Microsyst. Technol. 2017, 23, 4659–4669. [Google Scholar] [CrossRef]
- Feng, G.; Lin, Z. PZT-based concave diaphragm transducer with compliant supporting layer for releasing residual stress. Microelectron. Eng. 2011, 88, 3199–3206. [Google Scholar] [CrossRef]
- Ling, J.; Chen, Y.; Chen, Y.; Wang, D.; Zhao, Y.; Pang, Y.; Yang, Y.; Ren, T. Design and Characterization of High-Density Ultrasonic Transducer Array. IEEE Sens. J. 2018, 18, 2285–2290. [Google Scholar] [CrossRef]
- Kusano, Y.; Wang, Q.; Luo, G.; Lu, Y.; Ryan, Q.R.; Polcawich, R.G.; David, A. Horsley, Effects of DC bias tuning on air-coupled PZT piezoelectric micromachined ultrasonic transducers. J. Microelectromech. Syst. 2018, 2, 296–304. [Google Scholar] [CrossRef]
- Sarkar, N.; O’Hanlon, B.; Lee, G.; Strathearn, D.; Olfat, M.; Rohani, A.; Mansour, R.R. Optical MEMS index finger microgesture input sensor for mobile and wearable devices. In Proceedings of the 2017 19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 250–253. [Google Scholar]
- Przybyla, R.; Izyumin, I.; Kline, M.; Boser, B.; Shelton, S.; Guedes, A.; Horsley, D. An ultrasonic rangefinder based on an AlN piezoelectric micromachined ultrasound transducer. In Proceedings of the SENSORS, 2010 IEEE, Kona, HI, USA, 1–4 November 2010; pp. 2417–2421. [Google Scholar]
- Melchionni, D.; Pesatori, A.; Norgia, M. Optical proximity sensor based on self-mixing interferometry. Opt. Eng. 2018, 57, 051507. [Google Scholar] [CrossRef]
- Kelemen, M.; Virgala, I.; Kelemenová, T.; Miková, Ľ.; Frankovský, P.; Lipták, T.; Lörinc, M. Distance measurement via using of ultrasonic sensor. J. Autom. Control 2015, 3, 71–74. [Google Scholar]
- Distance Sensor Comparison Guide. Available online: https://www.sparkfun.com/distance_sensor_comparison_guide (accessed on 27 October 2019).
- Ultrasonic Sensors. Available online: https://www.murata.com/en-global/products/sensor/ultrasonic (accessed on 27 October 2019).
- Ultrasonic-Based Driver Assistance Systems. Available online: https://www.bosch-mobility-solutions.com/media/global/products-and-services/passenger-cars-and-light-commercial-vehicles/driver-assistance-systems/construction-zone-assist/product-data-sheet-ultrasonic-sensors-generation-6.pdf (accessed on 27 October 2019).
- Qing, M.S.; Wang, C.J. The research of MCU ultrasonic range finder. In Proceedings of the 2016 International Symposium on Computer, Consumer and Control (IS3C), Xi’an, China, 4–6 July 2016; pp. 915–918. [Google Scholar]
- Valerian, P.M.; Salceanu, A.; Neacsu, O.M. Ultrasonic radar. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016; pp. 551–554. [Google Scholar]
- Feng, G.H.; Chen, W.M. Micromachined lead zirconium titanate thin-film-cantilever-based acoustic emission sensor with poly (N-isopropylacrylamide) actuator for increasing contact pressure. Smart Mater. Struct. 2016, 25, 055046. [Google Scholar] [CrossRef]
- Siemens Digital Industries Software. Available online: https://community.plm.automation.siemens.com/t5/Testing-Knowledge-Base/Natural-Frequency-and-Resonance/ta-p/498422 (accessed on 27 October 2019).
- Feng, G.; Lee, K. Hydrothermally synthesized PZT film grown in highly concentrated KOH solution with large electromechanical coupling coefficient for resonator. R. Soc. Open Sci. 2017, 4, 171363. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layers | Young’s Modulus (GPa) | Density (kg/m3) | Thickness (µm) |
|---|---|---|---|
| Silver | 60 | 8000 | 1 |
| PZT | 35 | 7500 | 4 |
| Ti | 110 | 4506 | 5 |
| PZT | 35 | 7500 | 4 |
| Equivalent | 43.45 | 6466 | 14 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, G.-H.; Liu, H.-J. Piezoelectric Micromachined Ultrasonic Transducers with a Cost-Effective Bottom-Up Fabrication Scheme for Millimeter-Scale Range Finding. Sensors 2019, 19, 4696. https://doi.org/10.3390/s19214696
Feng G-H, Liu H-J. Piezoelectric Micromachined Ultrasonic Transducers with a Cost-Effective Bottom-Up Fabrication Scheme for Millimeter-Scale Range Finding. Sensors. 2019; 19(21):4696. https://doi.org/10.3390/s19214696
Chicago/Turabian StyleFeng, Guo-Hua, and Hua-Jin Liu. 2019. "Piezoelectric Micromachined Ultrasonic Transducers with a Cost-Effective Bottom-Up Fabrication Scheme for Millimeter-Scale Range Finding" Sensors 19, no. 21: 4696. https://doi.org/10.3390/s19214696
APA StyleFeng, G.-H., & Liu, H.-J. (2019). Piezoelectric Micromachined Ultrasonic Transducers with a Cost-Effective Bottom-Up Fabrication Scheme for Millimeter-Scale Range Finding. Sensors, 19(21), 4696. https://doi.org/10.3390/s19214696