Simultaneous EEG Acquisition System for Multiple Users: Development and Related Issues



Abstract
1. Introduction
- Multiple (at least two or more) acquisition devices are necessary for hyperscanning studies. Depending on the number of channels, reliable commercial EEG or fNIRS devices may range in price from $3000 to over $10,000 per unit. To reduce the cost, it may be necessary to custom-made devices or reduce the number of channels greatly. In addition to their cost, recruiting participants and managing experiments with many participants are not easy. As the number of participants increases, the total experimental cost, including management cost (the number of staff, device maintenance, preparation time for the experiment, and so on) increases significantly.
- Because of these problems, no well-controlled experimental paradigm for many participants (more than two) has been developed. To mimic daily life interactions in hyperscanning experiments, participants need to interact freely and easily without feeling they are controlled. However, the data acquired are likely to include severe artifacts, such as movement noise, when great freedom is given during the interaction task. It is relatively easy to identify features or analyze data under well-controlled experiments, such as a locked task time and synchronized stimulus presentation. These two factors (realistic experimental settings and ability to conduct data analysis easily) may lead to problems that make it difficult to satisfy both factors. Furthermore, unlike dyadic interactions, there may be exponentially greater degrees of control in group interactions, and thus, designing a well-controlled experimental paradigm is very challenging.
- It also is difficult to develop multilateral analysis techniques. Connectivity and causality are used primarily in analysis in hyperscanning studies. In the case in which three or more people interact, the inter-relation between a pair of people can be far more complex than in a dyadic interaction, and existing connectivity techniques may be unsuitable for multilateral analysis.
- Multilateral commercial acquisition systems for hyperscanning are not popular in the market. Each manufacturer may provide its own solution for hyperscanning, but it is difficult to measure many (more than two) people at the same time, and the data acquisition strategy for hyperscanning differs depending on the manufacturer [45]. To the best of our knowledge, there is no commercial hyperscanning acquisition system for more than four people. Furthermore, it is difficult to find detailed reports on the way to set up and implement such an acquisition system.
2. Acquisition Framework Development
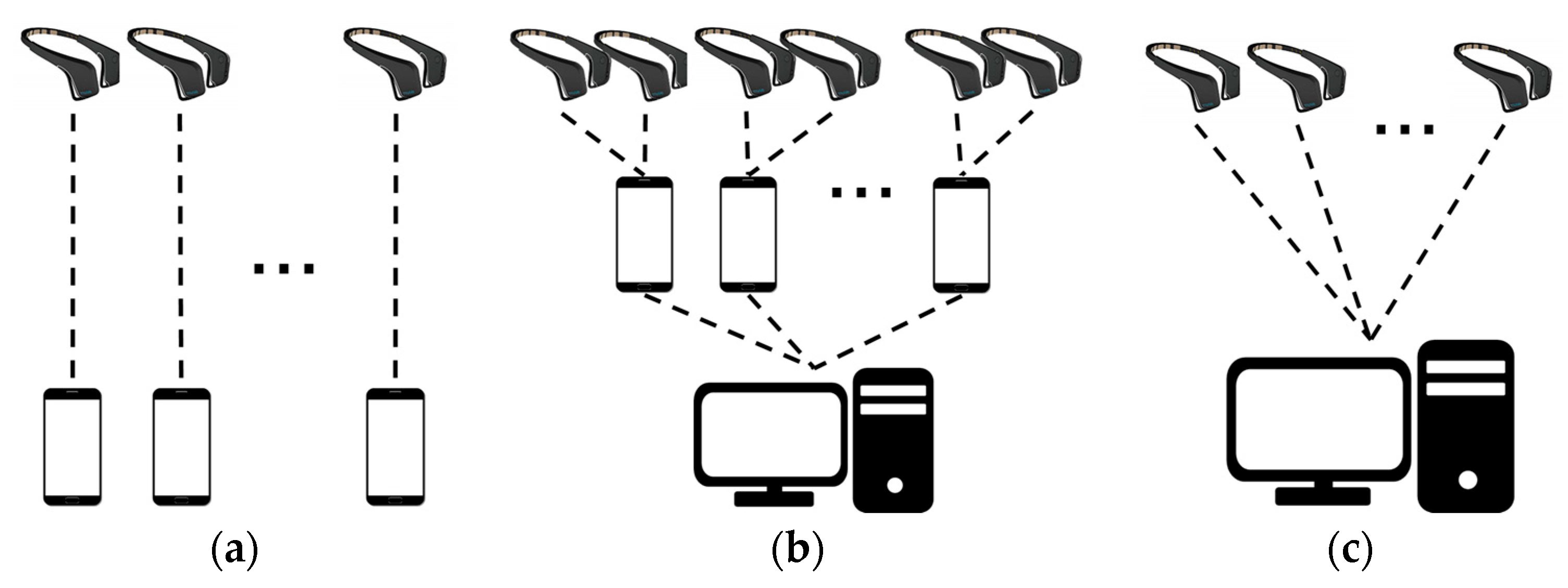
2.1. Connection of Devices
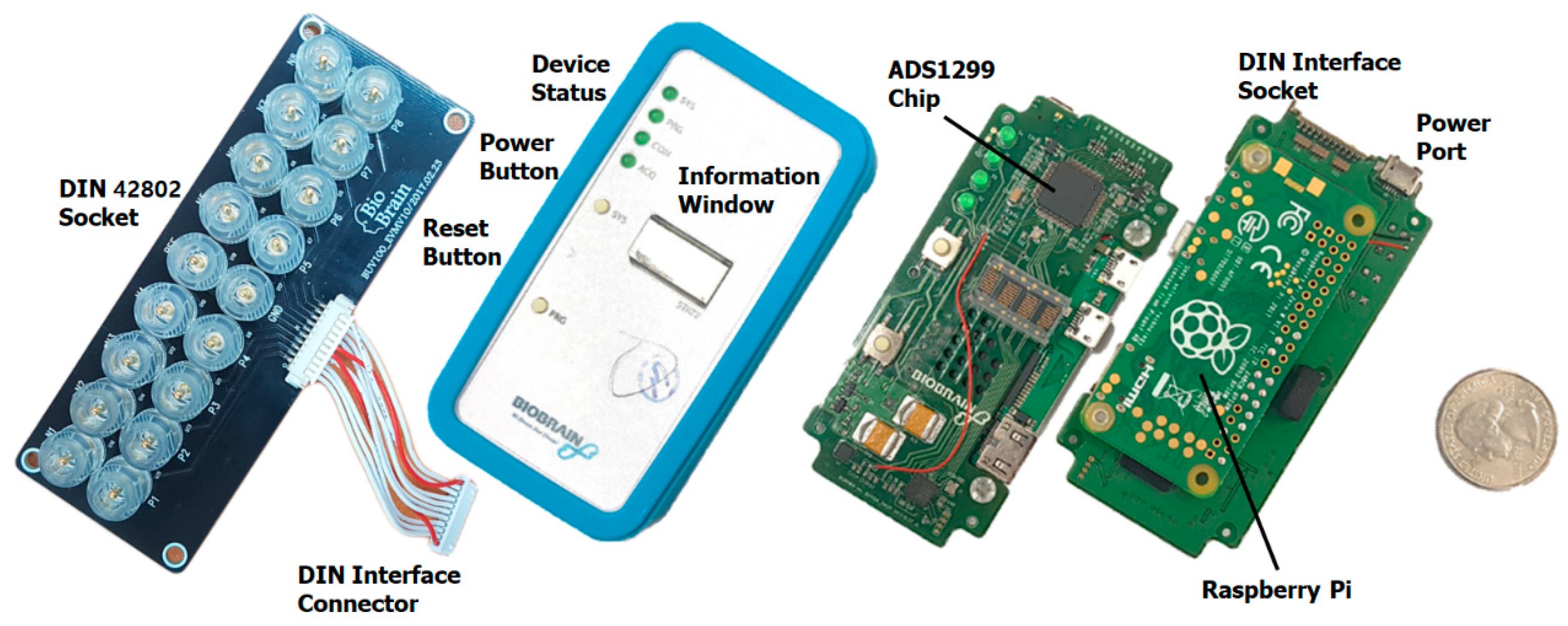
2.2. Hardware
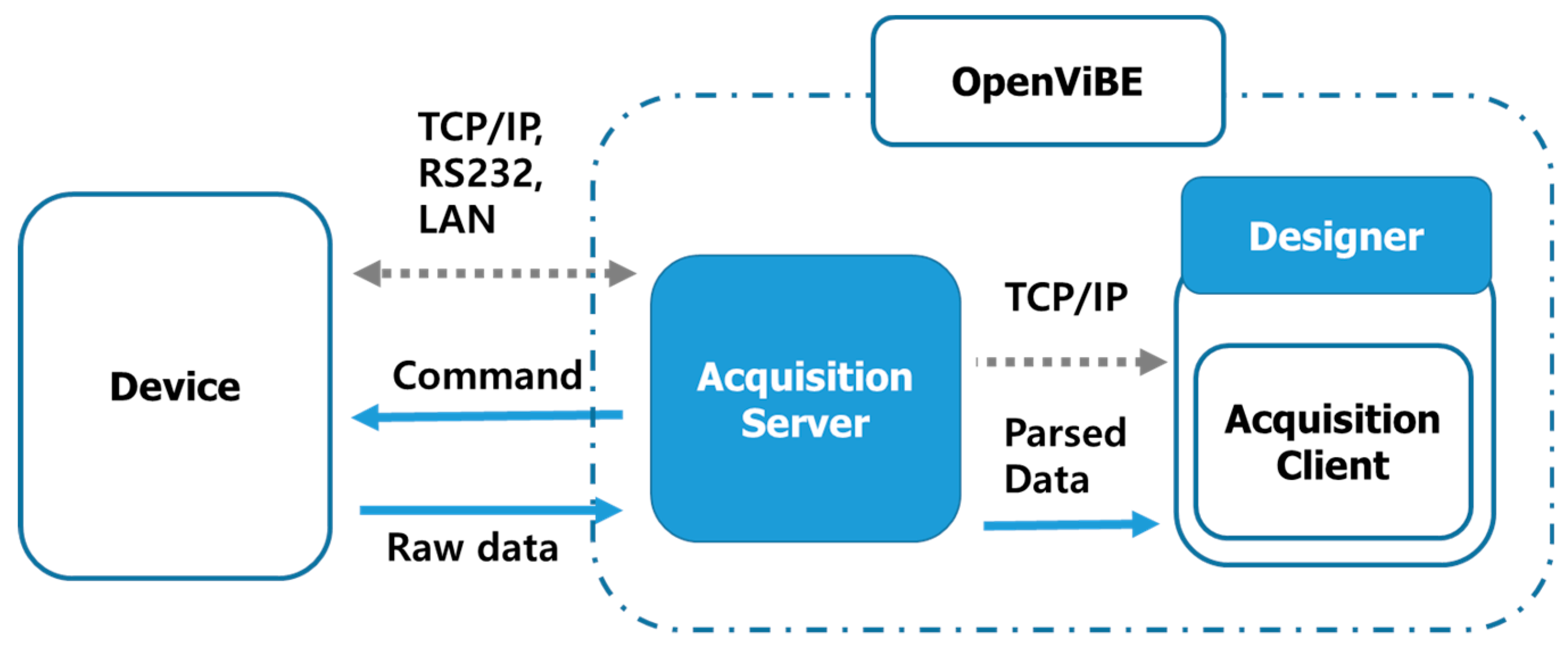
2.3. Software
3. Validation of our Designed Framework
3.1. Validation Experiments
3.1.1. Communication
- Case 1: The number of devices connected varied from 1–10 and each device was kept 3 m from the router
- Case 2: With 10 devices connected to the router, the communication delay was estimated over various distances (2.0, 2.5, 3.0, 3.5, 4.0, 4.5, 5.0 m) between the devices and router
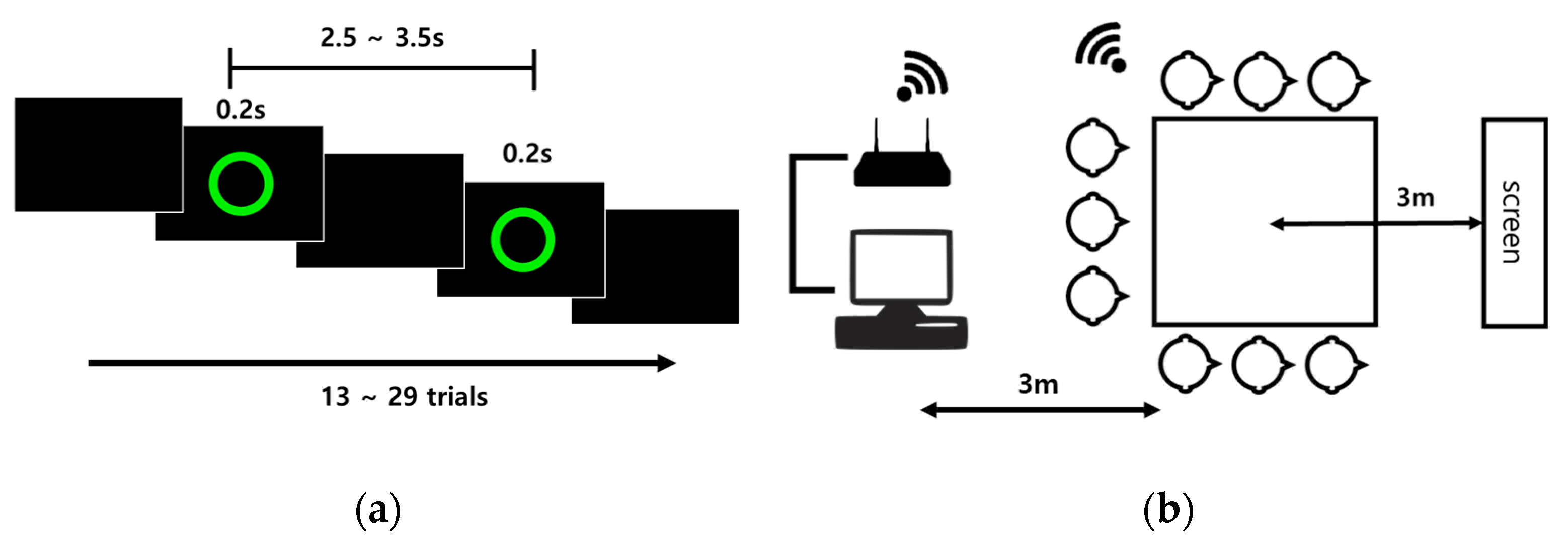
3.1.2. Event-Related Potential Experiment
- Its minimum peak appeared 140–300 ms after stimulus onset.
- Its maximum peak appeared 280–450 ms after stimulus onset.
- Its peak to peak amplitude was greater than 6 μV.
3.2. Validation Results
4. Discussion
4.1. Connection and Synchronization of Devices
4.2. Other Platforms for Multilateral Systems: Lab Streaming Layer
4.3. Recent Version of OpenViBE
4.4. System Load
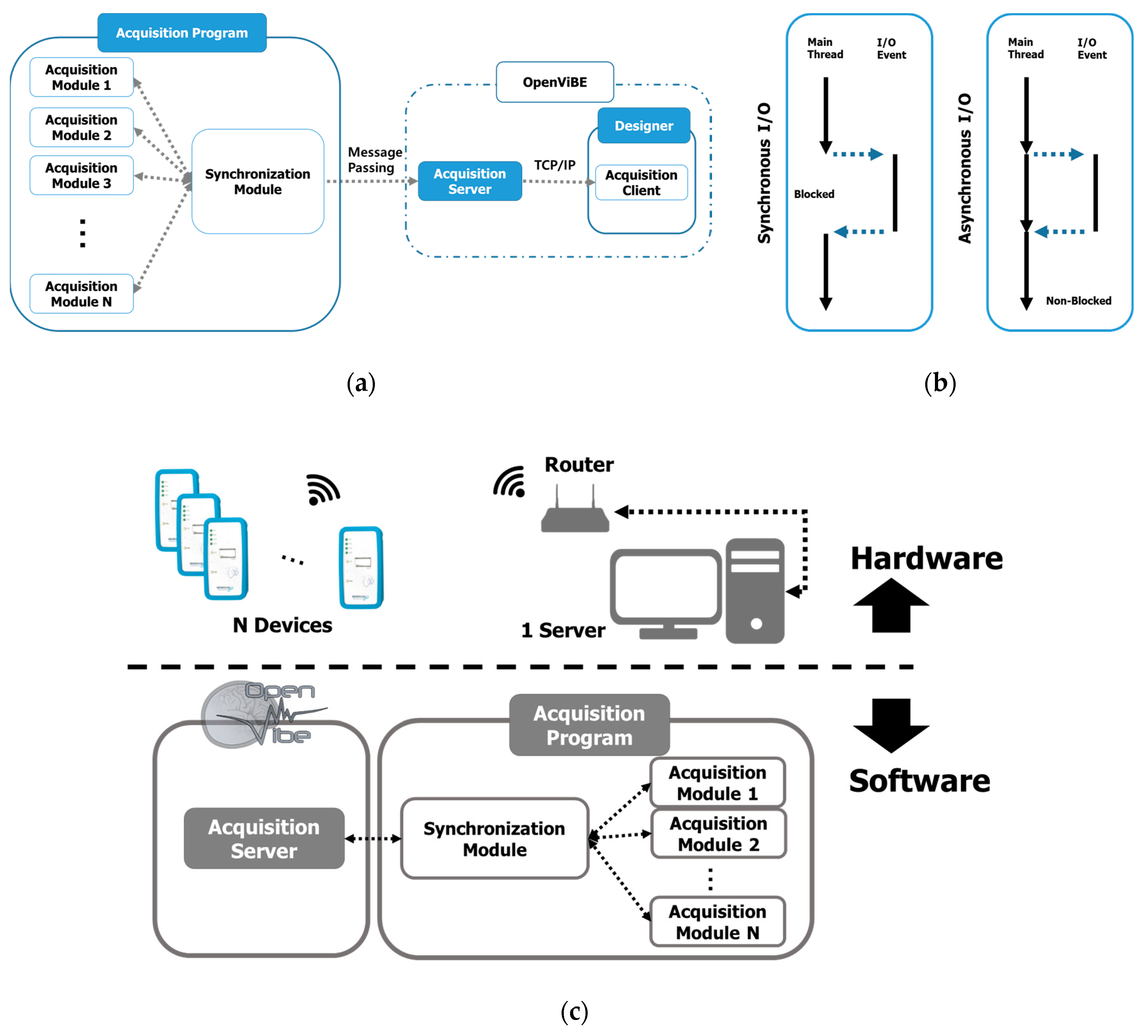
- A server process was connected with multiple clients (devices). As a unit of program execution, the process was allocated a unique address space and hardware resources, including CPU registers, text data in memory, and open files and devices. Therefore, as the process increases, the burden on resources increases. In addition, as the server’s OS does not run just one program, it is necessary to change the process that it executes, which entails a very high cost in context exchange. Therefore, we made it possible for the software to communicate with all devices in one process that reduced the number of processes overall.
- Second, asynchronous communication. There are synchronous and asynchronous modes of communication, as shown in Figure 4. In the synchronous communication mode, CPU blocks and no other operations can be processed until a response arrives from the device. In this structure, a greater number of devices increases the blocked time required for input/output (I/O), which may result in very inefficient operation. However, asynchronous communication reduces the hardware resource load dramatically, even in situations in which multiple devices are connected. Nonetheless, in asynchronous communication, the OS determines the send timing and the data’s size, so it is necessary to parse the data and control synchronization between devices.
4.5. Electrodes
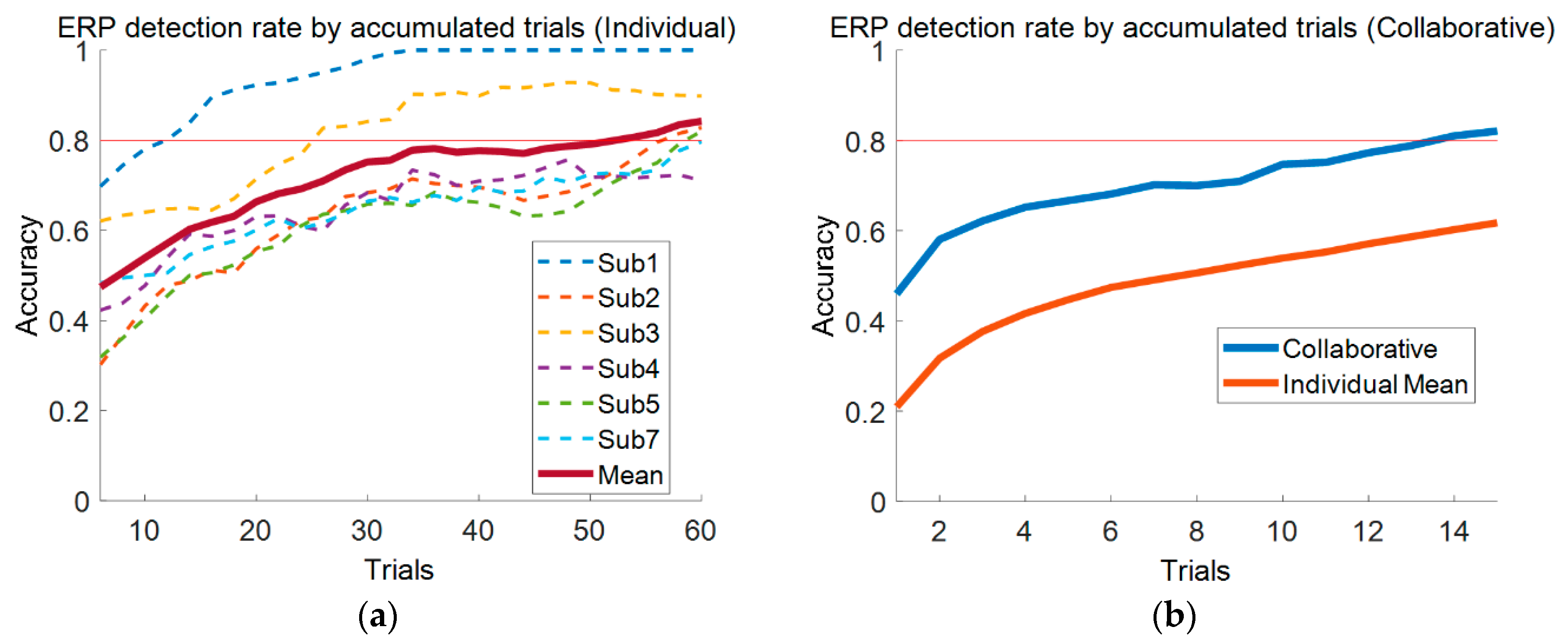
4.6. ERP Detection
4.7. Applications, Limitations, and Future Work
- The framework proposed adopted a connection using a 2.4 GHz Wi-Fi. Generally, a 2.4 GHz band is used in many devices, such as wireless keyboards and routers. Therefore, devices operate stably when there is no other router or device nearby that uses 2.4 GHz. However, communication disconnection or delay may occur when the conditions surrounding the wireless connections are crowded.
- Ping was used to estimate the transmission delay, which is technically different from the EEG data devices send, and therefore it may offer only a rough estimation. In addition, the ping tool’s accuracy is limited inherently because of its temporal resolution in ms.
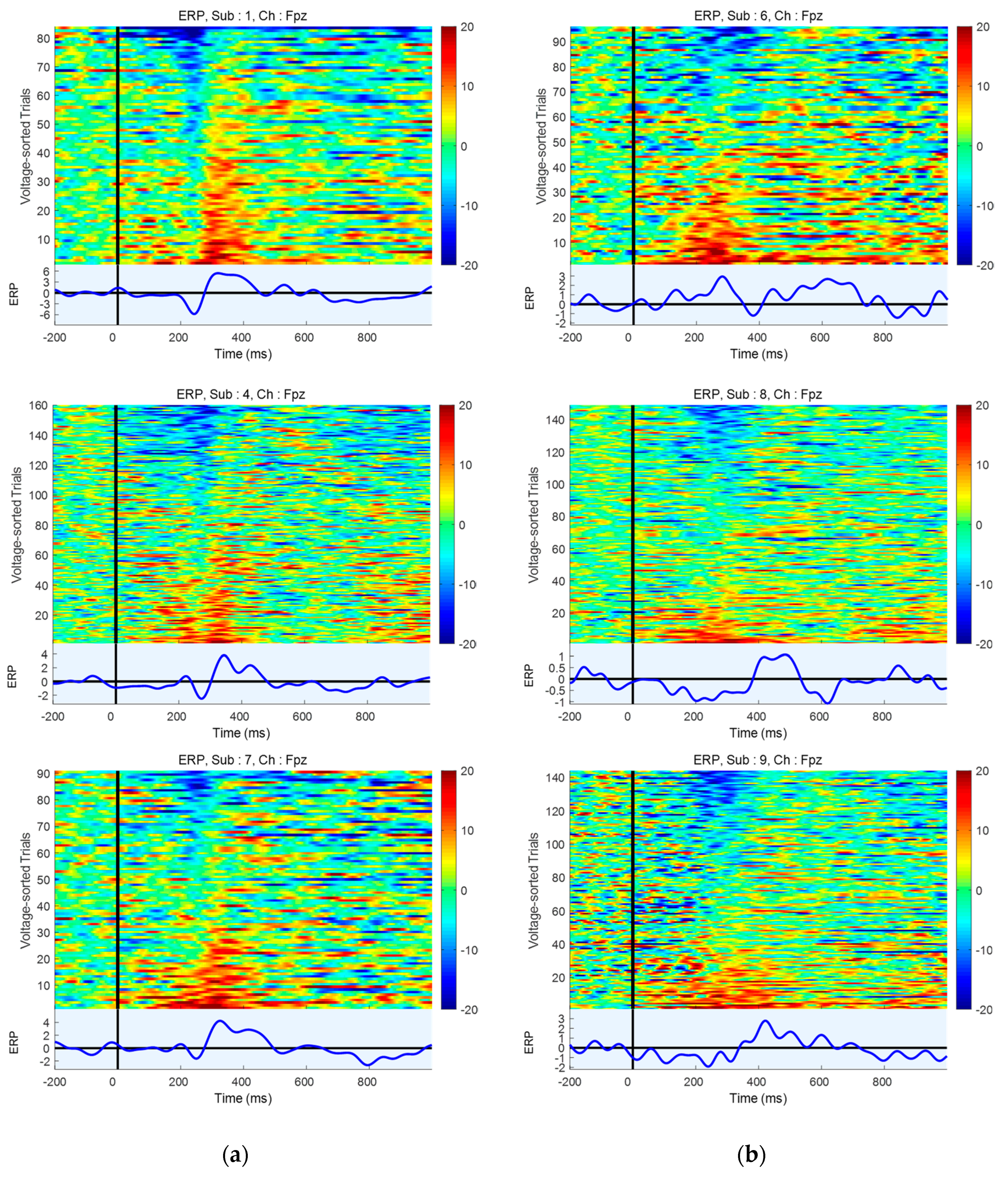
- A very simple ERP component that has a minimum/maximum peak in the N2 and P3 ranges was investigated in the validation experiment. However, N2 and P3 timings vary greatly depending on the trials or people. For example, one participant (Sub 4) showed clean EEG data in which it was easy to detect the ERP component (Figure 8a). However, the ERP component’s shape did not meet the criteria we proposed and thus, it did not perform well. Therefore, we believe that other criteria for ERP detection may yield different or better results.
- In this work, our framework was tested with a group of nine people. However, we confirmed that it could work with up to 20 people. Because of usable devices’ limitation during experiments, only nine devices were used. We will continue to perform experiments with larger groups in the future.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| INS | Interpersonal neural synchronization |
| fMRI | Functional magnetic resonance imaging |
| fNIRS | Functional near-infrared spectroscopy |
| MEG | Magnetoencephalography |
| EEG | Electroencephalography |
| LAN | Local area network |
| PC | Personal computer |
| ERP | Event-related potential |
| IP | Internet Protocol |
| DIN | Deutsches Institut für Normung (German Institute for Standardization) |
| CPU | Central processing unit |
| DDR4 | Double data rate fourth generation |
| OS | Operating system |
| ISI | Inter-stimulus interval |
| ICA | Independent component analysis |
| LSL | Lab streaming layer |
| NTP | Network Time Protocol |
| I/O | Input/output |
| PCB | Printed circuit board |
| BCI | Brain-computer interface |
References
- Montague, P.R.; Berns, G.S.; Cohen, J.D.; McClure, S.M.; Pagnoni, G.; Dhamala, M.; Wiest, M.C.; Karpov, I.; King, R.D.; Apple, N.; et al. Hyperscanning: Simultaneous fMRI during Linked Social Interactions. NeuroImage 2002, 16, 1159–1164. [Google Scholar] [CrossRef]
- Saito, D.; Tanabe, H.; Izuma, K.; Hayashi, M.; Morito, Y.; Komeda, H.; Uchiyama, H.; Kosaka, H.; Okazawa, H.; Fujibayashi, Y.; et al. “Stay Tuned”: Inter-Individual Neural Synchronization During Mutual Gaze and Joint Attention. Front. Integr. Neurosci. 2010, 4, 127. [Google Scholar] [CrossRef] [PubMed]
- Bilek, E.; Ruf, M.; Schäfer, A.; Akdeniz, C.; Calhoun, V.D.; Schmahl, C.; Demanuele, C.; Tost, H.; Kirsch, P.; Meyer-Lindenberg, A. Information flow between interacting human brains: Identification, validation, and relationship to social expertise. Proc. Natl. Acad. Sci. USA 2015, 112, 5207–5212. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Dai, B.; Peng, D.; Zhu, C.; Liu, L.; Lu, C. Neural Synchronization during Face-to-Face Communication. J. Neurosci. 2012, 32, 16064. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Chen, C.; Dai, B.; Shi, G.; Ding, G.; Liu, L.; Lu, C. Leader emergence through interpersonal neural synchronization. Proc. Natl. Acad. Sci. USA 2015, 112, 4274. [Google Scholar] [CrossRef] [PubMed]
- Ahn, S.; Cho, H.; Kwon, M.; Kim, K.; Kwon, H.; Kim, B.S.; Chang, W.S.; Chang, J.W.; Jun, S.C. Interbrain phase synchronization during turn-taking verbal interaction-a hyperscanning study using simultaneous EEG/MEG. Hum. Brain Mapp. 2018, 39, 171–188. [Google Scholar] [CrossRef] [PubMed]
- Tognoli, E.; Lagarde, J.; DeGuzman, G.C.; Kelso, J.A.S. The phi complex as a neuromarker of human social coordination. Proc. Natl. Acad. Sci. USA 2007, 104, 8190. [Google Scholar] [CrossRef] [PubMed]
- Zhou, G.; Bourguignon, M.; Parkkonen, L.; Hari, R. Neural signatures of hand kinematics in leaders vs. followers: A dual-MEG study. NeuroImage 2016, 125, 731–738. [Google Scholar] [CrossRef] [PubMed]
- Naeem, M.; Prasad, G.; Watson, D.R.; Kelso, J.A.S. Electrophysiological signatures of intentional social coordination in the 10–12Hz range. NeuroImage 2012, 59, 1795–1803. [Google Scholar] [CrossRef]
- Baker, J.M.; Liu, N.; Cui, X.; Vrticka, P.; Saggar, M.; Hosseini, S.M.H.; Reiss, A.L. Sex differences in neural and behavioral signatures of cooperation revealed by fNIRS hyperscanning. Sci. Rep. 2016, 6, 26492. [Google Scholar] [CrossRef]
- Babiloni, C.; Buffo, P.; Vecchio, F.; Marzano, N.; Del Percio, C.; Spada, D.; Rossi, S.; Bruni, I.; Rossini, P.M.; Perani, D. Brains “in concert”: Frontal oscillatory alpha rhythms and empathy in professional musicians. NeuroImage 2012, 60, 105–116. [Google Scholar] [CrossRef] [PubMed]
- Osaka, N.; Minamoto, T.; Yaoi, K.; Azuma, M.; Shimada, Y.M.; Osaka, M. How Two Brains Make One Synchronized Mind in the Inferior Frontal Cortex: fNIRS-Based Hyperscanning During Cooperative Singing. Front. Psychol. 2015, 6, 1811. [Google Scholar] [CrossRef] [PubMed]
- Lindenberger, U.; Li, S.-C.; Gruber, W.; Müller, V. Brains swinging in concert: Cortical phase synchronization while playing guitar. BMC Neurosci. 2009, 10, 22. [Google Scholar] [CrossRef] [PubMed]
- Toppi, J.; Sciaraffa, N.; Antonacci, Y.; Anzolin, A.; Caschera, S.; Petti, M.; Mattia, D.; Astolfi, L. Measuring the agreement between brain connectivity networks. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 68–71. [Google Scholar]
- Sciaraffa, N.; Borghini, G.; Aricò, P.; Di Flumeri, G.; Colosimo, A.; Bezerianos, A.; Thakor, N.V.; Babiloni, F. Brain Interaction during Cooperation: Evaluating Local Properties of Multiple-Brain Network. Brain Sci. 2017, 7, 90. [Google Scholar] [CrossRef]
- Liu, D.; Liu, S.; Liu, X.; Zhang, C.; Li, A.; Jin, C.; Chen, Y.; Wang, H.; Zhang, X. Interactive Brain Activity: Review and Progress on EEG-Based Hyperscanning in Social Interactions. Front. Psychol. 2018, 9, 1862. [Google Scholar] [CrossRef]
- Astolfi, L.; Toppi, J.; Borghini, G.; Vecchiato, G.; Isabella, R.; Fallani, F.D.V.; Cincotti, F.; Salinari, S.; Mattia, D.; He, B.; et al. Study of the functional hyperconnectivity between couples of pilots during flight simulation: An EEG hyperscanning study. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; pp. 2338–2341. [Google Scholar]
- Astolfi, L.; Toppi, J.; Borghini, G.; Vecchiato, G.; He, E.J.; Roy, A.; Cincotti, F.; Salinari, S.; Mattia, D.; He, B.; et al. Cortical activity and functional hyperconnectivity by simultaneous EEG recordings from interacting couples of professional pilots. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; pp. 4752–4755. [Google Scholar]
- Kawasaki, M.; Yamada, Y.; Ushiku, Y.; Miyauchi, E.; Yamaguchi, Y. Inter-brain synchronization during coordination of speech rhythm in human-to-human social interaction. Sci. Rep. 2013, 3, 1692. [Google Scholar] [CrossRef]
- Babiloni, F.; Astolfi, L. Social neuroscience and hyperscanning techniques: Past, present and future. Neurosci. Biobehav. Rev. 2014, 44, 76–93. [Google Scholar] [CrossRef]
- Mu, Y.; Cerritos, C.; Khan, F. Neural mechanisms underlying interpersonal coordination: A review of hyperscanning research. Soc. Personal. Psychol. Compass 2018, 12, e12421. [Google Scholar] [CrossRef]
- Wang, M.-Y.; Luan, P.; Zhang, J.; Xiang, Y.-T.; Niu, H.; Yuan, Z. Concurrent mapping of brain activation from multiple subjects during social interaction by hyperscanning: A mini-review. Quant. Imaging Med. Surg. 2018, 8, 819–837. [Google Scholar] [CrossRef]
- Hari, R.; Kujala, M.V. Brain Basis of Human Social Interaction: From Concepts to Brain Imaging. Physiol. Rev. 2009, 89, 453–479. [Google Scholar] [CrossRef]
- Hasson, U.; Ghazanfar, A.A.; Galantucci, B.; Garrod, S.; Keysers, C. Brain-to-Brain coupling: A mechanism for creating and sharing a social world. Trends Cogn. Sci. 2012, 16, 114–121. [Google Scholar] [CrossRef] [PubMed]
- Konvalinka, I.; Roepstorff, A. The two-brain approach: How can mutually interacting brains teach us something about social interaction? Front. Hum. Neurosci. 2012, 6, 215. [Google Scholar] [CrossRef] [PubMed]
- Astolfi, L.; Toppi, J.; De Vico Fallani, F.; Vecchiato, G.; Cincotti, F.; Wilke, C.T.; Yuan, H.; Mattia, D.; Salinari, S.; He, B.; et al. Imaging the Social Brain by Simultaneous Hyperscanning During Subject Interaction. IEEE Intell. Syst. 2011, 26, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Zimmerman, J.E.; Thiene, P.; Harding, J.T. Design and Operation of Stable rf-Biased Superconducting Point-Contact Quantum Devices, and a Note on the Properties of Perfectly Clean Metal Contacts. J. Appl. Phys. 1970, 41, 1572–1580. [Google Scholar] [CrossRef]
- Ogawa, S.; Lee, T.-M.; Nayak, A.S.; Glynn, P. Oxygenation-sensitive contrast in magnetic resonance image of rodent brain at high magnetic fields. Magn. Reson. Med. 1990, 14, 68–78. [Google Scholar] [CrossRef]
- Belliveau, J.W.; Kennedy, D.N.; McKinstry, R.C.; Buchbinder, B.R.; Weisskoff, R.M.; Cohen, M.S.; Vevea, J.M.; Brady, T.J.; Rosen, B.R. Functional mapping of the human visual cortex by magnetic resonance imaging. Science 1991, 254, 716–719. [Google Scholar] [CrossRef]
- Jobsis, F.F. Noninvasive, infrared monitoring of cerebral and myocardial oxygen sufficiency and circulatory parameters. Science 1977, 198, 1264–1267. [Google Scholar] [CrossRef]
- Ferrari, M.; Giannini, I.; Sideri, G.; Zanette, E. Continuous Non Invasive Monitoring of Human Brain by Near Infrared Spectroscopy. In Oxygen Transport to Tissue VII; Kreuzer, F., Cain, S.M., Turek, Z., Goldstick, T.K., Eds.; Springer: Boston, MA, USA, 1985; pp. 873–882. ISBN 978-1-4684-3291-6. [Google Scholar]
- Cohen, D. Magnetoencephalography: Evidence of Magnetic Fields Produced by Alpha-Rhythm Currents. Science 1968, 161, 784–786. [Google Scholar] [CrossRef]
- Haas, L.F. Hans Berger (1873–1941), Richard Caton (1842–1926), and electroencephalography. J. Neurol. Neurosurg. Psychiatry 2003, 74, 9. [Google Scholar] [CrossRef]
- Dai, B.; Chen, C.; Long, Y.; Zheng, L.; Zhao, H.; Bai, X.; Liu, W.; Zhang, Y.; Liu, L.; Guo, T.; et al. Neural mechanisms for selectively tuning in to the target speaker in a naturalistic noisy situation. Nat. Commun. 2018, 9, 2405. [Google Scholar] [CrossRef]
- Cherry, E.C. Some Experiments on the Recognition of Speech, with One and with Two Ears. J. Acoust. Soc. Am. 1953, 25, 975–979. [Google Scholar] [CrossRef]
- Nozawa, T.; Sasaki, Y.; Sakaki, K.; Yokoyama, R.; Kawashima, R. Interpersonal frontopolar neural synchronization in group communication: An exploration toward fNIRS hyperscanning of natural interactions. NeuroImage 2016, 133, 484–497. [Google Scholar] [CrossRef] [PubMed]
- Duan, L.; Dai, R.-N.; Xiao, X.; Sun, P.-P.; Li, Z.; Zhu, C.-Z. Cluster imaging of multi-brain networks (CIMBN): A general framework for hyperscanning and modeling a group of interacting brains. Front. Neurosci. 2015, 9, 267. [Google Scholar] [CrossRef] [PubMed]
- Babiloni, F.; Cincotti, F.; Mattia, D.; Mattiocco, M.; Fallani, F.D.V.; Tocci, A.; Bianchi, L.; Marciani, M.G.; Astolfi, L. Hypermethods for EEG hyperscanning. In Proceedings of the 2006 International Conference of the IEEE Engineering in Medicine and Biology Society, New York, NY, USA, 30 August–3 September 2006; pp. 3666–3669. [Google Scholar]
- Babiloni, F.; Cincotti, F.; Mattia, D.; Fallani, F.D.V.; Tocci, A.; Bianchi, L.; Salinari, S.; Marciani, M.; Colosimo, A.; Astolfi, L. High Resolution EEG Hyperscanning During a Card Game. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 4957–4960. [Google Scholar]
- Astolfi, L.; Toppi, J.; De Vico Fallani, F.; Vecchiato, G.; Salinari, S.; Mattia, D.; Cincotti, F.; Babiloni, F. Neuroelectrical Hyperscanning Measures Simultaneous Brain Activity in Humans. Brain Topogr. 2010, 23, 243–256. [Google Scholar] [CrossRef] [PubMed]
- Babiloni, C.; Vecchio, F.; Infarinato, F.; Buffo, P.; Marzano, N.; Spada, D.; Rossi, S.; Bruni, I.; Rossini, P.M.; Perani, D. Simultaneous recording of electroencephalographic data in musicians playing in ensemble. Cortex 2011, 47, 1082–1090. [Google Scholar] [CrossRef]
- Poulsen, A.T.; Kamronn, S.; Dmochowski, J.; Parra, L.C.; Hansen, L.K. EEG in the classroom: Synchronised neural recordings during video presentation. Sci. Rep. 2017, 7, 43916. [Google Scholar] [CrossRef]
- Dikker, S.; Wan, L.; Davidesco, I.; Kaggen, L.; Oostrik, M.; McClintock, J.; Rowland, J.; Michalareas, G.; Van Bavel, J.J.; Ding, M.; et al. Brain-to-Brain Synchrony Tracks Real-World Dynamic Group Interactions in the Classroom. Curr. Biol. 2017, 27, 1375–1380. [Google Scholar] [CrossRef]
- Bevilacqua, D.; Davidesco, I.; Wan, L.; Chaloner, K.; Rowland, J.; Ding, M.; Poeppel, D.; Dikker, S. Brain-to-Brain Synchrony and Learning Outcomes Vary by Student–Teacher Dynamics: Evidence from a Real-world Classroom Electroencephalography Study. J. Cogn. Neurosci. 2018, 31, 401–411. [Google Scholar] [CrossRef]
- Barraza, P.; Dumas, G.; Liu, H.; Blanco-Gomez, G.; van den Heuvel, M.I.; Baart, M.; Pérez, A. Implementing EEG hyperscanning setups. MethodsX 2019, 6, 428–436. [Google Scholar] [CrossRef]
- openFrameworks. Available online: https://openframeworks.cc/ (accessed on 2 September 2019).
- Renard, Y.; Lotte, F.; Gibert, G.; Congedo, M.; Maby, E.; Delannoy, V.; Bertrand, O.; Lécuyer, A. OpenViBE: An Open-Source Software Platform to Design, Test, and Use Brain–Computer Interfaces in Real and Virtual Environments. Presence 2010, 19, 35–53. [Google Scholar] [CrossRef]
- Wen, X.; Mo, J.; Ding, M. Exploring resting-state functional connectivity with total interdependence. NeuroImage 2012, 60, 1587–1595. [Google Scholar] [CrossRef] [PubMed]
- Schalk, G.; McFarland, D.J.; Hinterberger, T.; Birbaumer, N.; Wolpaw, J.R. BCI2000: A general-purpose brain-computer interface (BCI) system. IEEE Trans. Biomed. Eng. 2004, 51, 1034–1043. [Google Scholar] [CrossRef] [PubMed]
- Kothe, C.A.; Makeig, S. BCILAB: A platform for brain–computer interface development. J. Neural Eng. 2013, 10, 056014. [Google Scholar] [CrossRef] [PubMed]
- Delorme, A.; Mullen, T.; Kothe, C.; Akalin Acar, Z.; Bigdely-Shamlo, N.; Vankov, A.; Makeig, S. EEGLAB, SIFT, NFT, BCILAB, and ERICA: New Tools for Advanced EEG Processing. Comput. Intell. Neurosci. 2011, 2011, 12. [Google Scholar] [CrossRef]
- Martin, J.; Kasch, W. Network Time Protocol Version 4: Protocol and Algorithms Specification; Internet Engineering Task Force: Fremont, CA, USA, 2010. [Google Scholar]
- Lopez-Gordo, M.A.; Sanchez-Morillo, D.; Pelayo Valle, F. Dry EEG electrodes. Sensors 2014, 14, 12847–12870. [Google Scholar] [CrossRef]
- Di Flumeri, G.; Aricò, P.; Borghini, G.; Sciaraffa, N.; Di Florio, A.; Babiloni, F. The Dry Revolution: Evaluation of Three Different EEG Dry Electrode Types in Terms of Signal Spectral Features, Mental States Classification and Usability. Sensors 2019, 19, 1365. [Google Scholar] [CrossRef]
- Asch, S.E. Effects of group pressure upon the modification and distortion of judgments. In Groups, Leadership and Men, Research in Human Relations; Carnegie Press: Oxford, UK, 1951; pp. 177–190. [Google Scholar]
- Wang, Y.; Jung, T.-P. A Collaborative Brain-Computer Interface for Improving Human Performance. PLoS ONE 2011, 6, e20422. [Google Scholar] [CrossRef]
- Poli, R.; Valeriani, D.; Cinel, C. Collaborative Brain-Computer Interface for Aiding Decision-Making. PLoS ONE 2014, 9, e102693. [Google Scholar] [CrossRef]
- Li, Y.; Nam, C.S. A Collaborative Brain-Computer Interface (BCI) for ALS Patients. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2015, 59, 716–720. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Wireless EEG [42] (Emotiv EPOC) | Wireless EEG [43,44] (Emotiv EPOC+) | Wireless EEG (Our Custom-Made System) |
|---|---|---|---|
| Sampling Frequency (Hz) | 128 | 256 | 1000 |
| Number of Channels | 14 | 14 | 8 |
| Concurrent Acquisition (Maximum) | 9 (N/M 1) | 13 (N/M) | 9 (20) |
| Connection Method | n:n | 1:n | 1:n |
| Basis Software | - | openFrameworks [46] | OpenViBE [47] |
| Synchronization during Experiment | Electrical spark | N/M | Frame number, synchronization module |
| Framework Structure | - | N/M | Described |
| Real-Time Processing 2 | N/M | N/M | Possible |
| Validation | N/M | Total independence [48], auditory ERP | Delay, loss rate, visual ERP |
| Number of Connected Devices | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Ping Delay (ms) | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 4 | 3 | 3 |
| Loss Rate (%) | 0.87 | 0.74 | 0.79 | 0.65 | 0.7 | 1.34 | 1.32 | 1.34 | 0.86 | 0.94 |
| Distance from the Router (m) | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 |
| Ping Delay (ms) | 3 | 2 | 3 | 3 | 3 | 3 | 3 |
| Loss Rate (%) | 0.80 | 0.62 | 0.70 | 0.89 | 0.76 | 0.58 | 0.61 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Cho, H.; Kim, K.; Jun, S.C. Simultaneous EEG Acquisition System for Multiple Users: Development and Related Issues. Sensors 2019, 19, 4592. https://doi.org/10.3390/s19204592
Lee S, Cho H, Kim K, Jun SC. Simultaneous EEG Acquisition System for Multiple Users: Development and Related Issues. Sensors. 2019; 19(20):4592. https://doi.org/10.3390/s19204592
Chicago/Turabian StyleLee, Sunghan, Hohyun Cho, Kiseong Kim, and Sung Chan Jun. 2019. "Simultaneous EEG Acquisition System for Multiple Users: Development and Related Issues" Sensors 19, no. 20: 4592. https://doi.org/10.3390/s19204592
APA StyleLee, S., Cho, H., Kim, K., & Jun, S. C. (2019). Simultaneous EEG Acquisition System for Multiple Users: Development and Related Issues. Sensors, 19(20), 4592. https://doi.org/10.3390/s19204592