Fixed-Time Observer Based Prescribed-Time Containment Control of Unmanned Underwater Vehicles with Faults and Uncertainties


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries and Problem Formulation
2.1. Preliminaries
2.2. Problem Formulation
2.3. Objective
3. Main Results
3.1. Model Transformation
3.2. Fault Estimation
3.3. Prescribed Time Consensus Controller Design
3.3.1. Block Decomposition
3.3.2. Prescribed-Time Controller Design
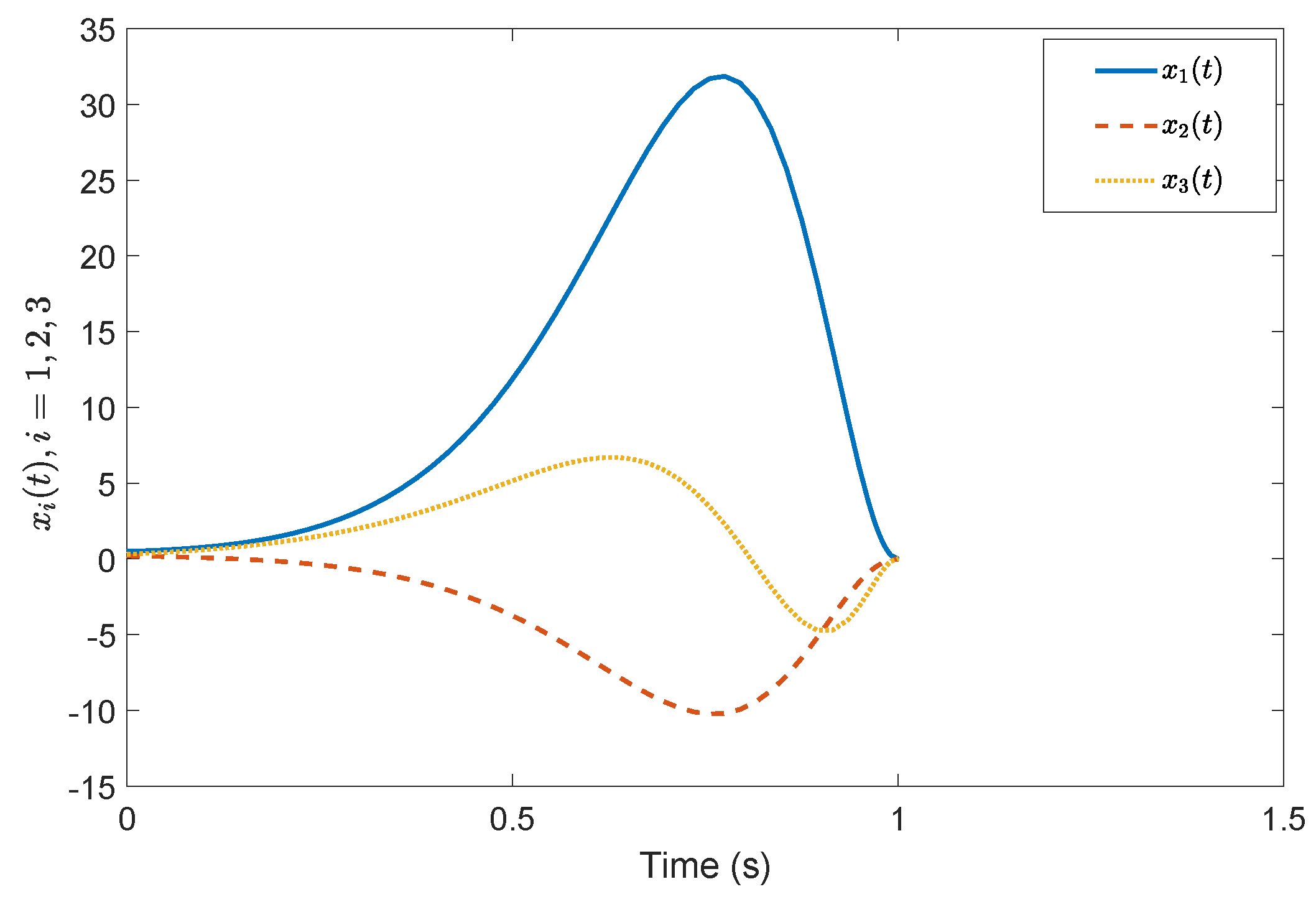
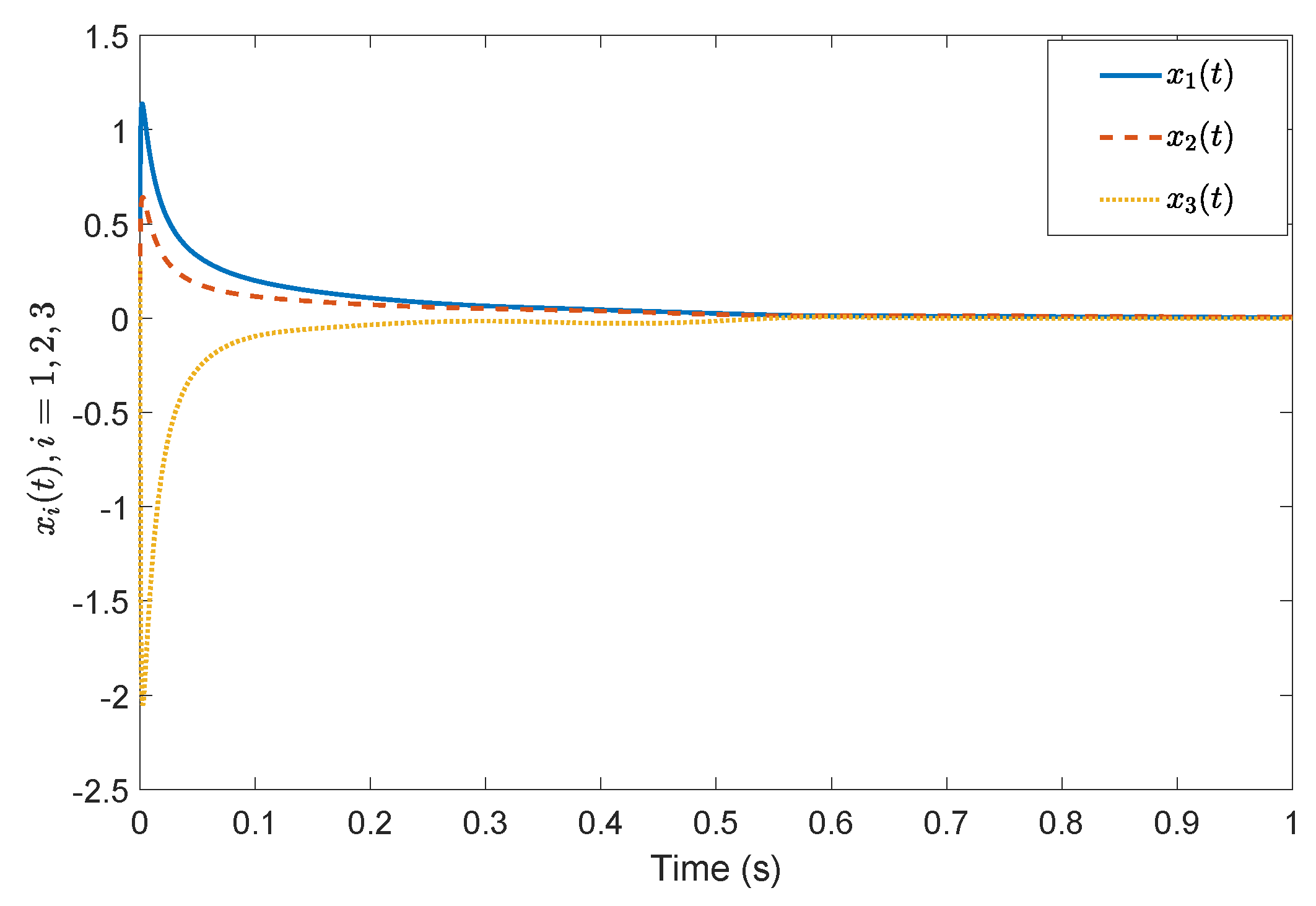
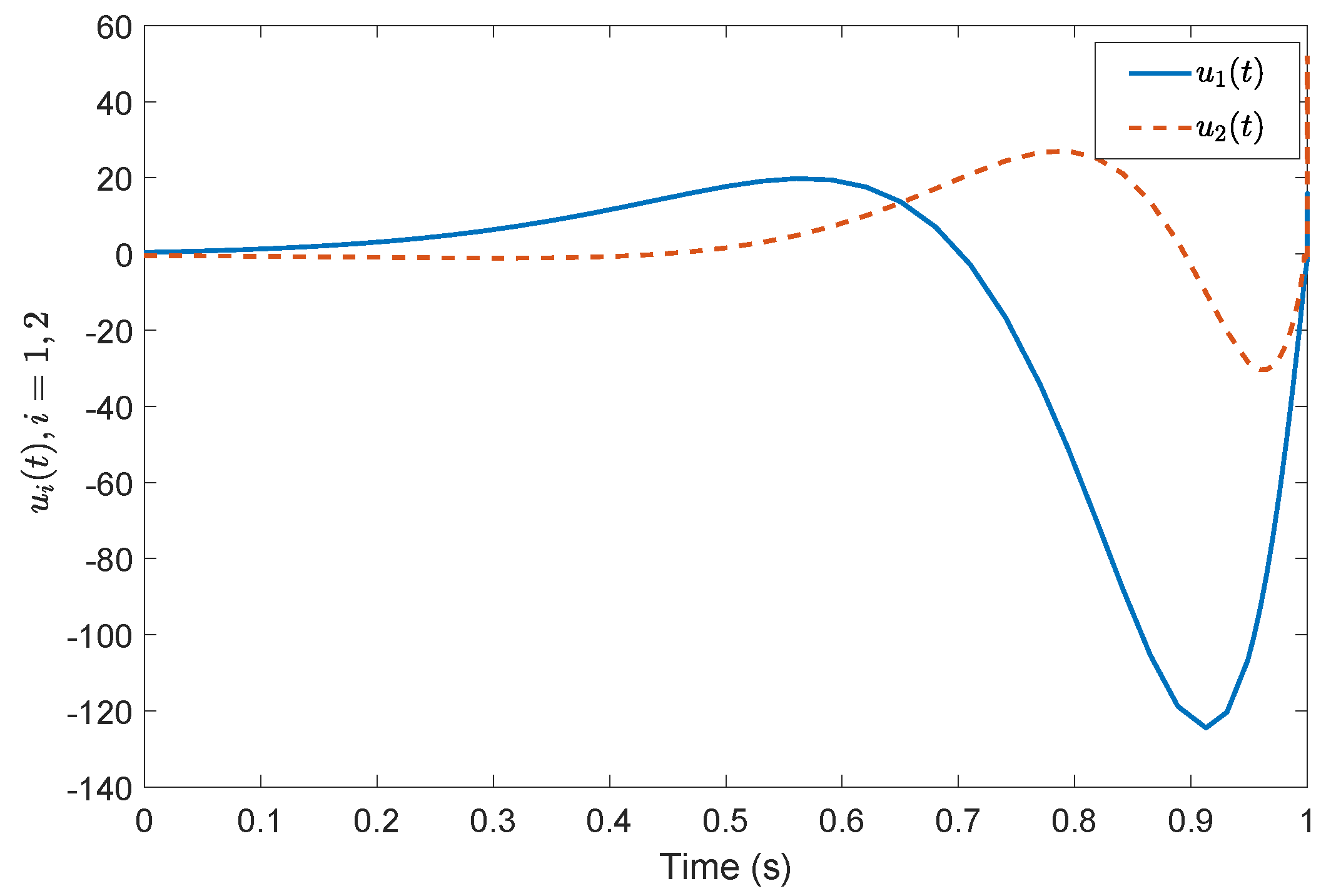
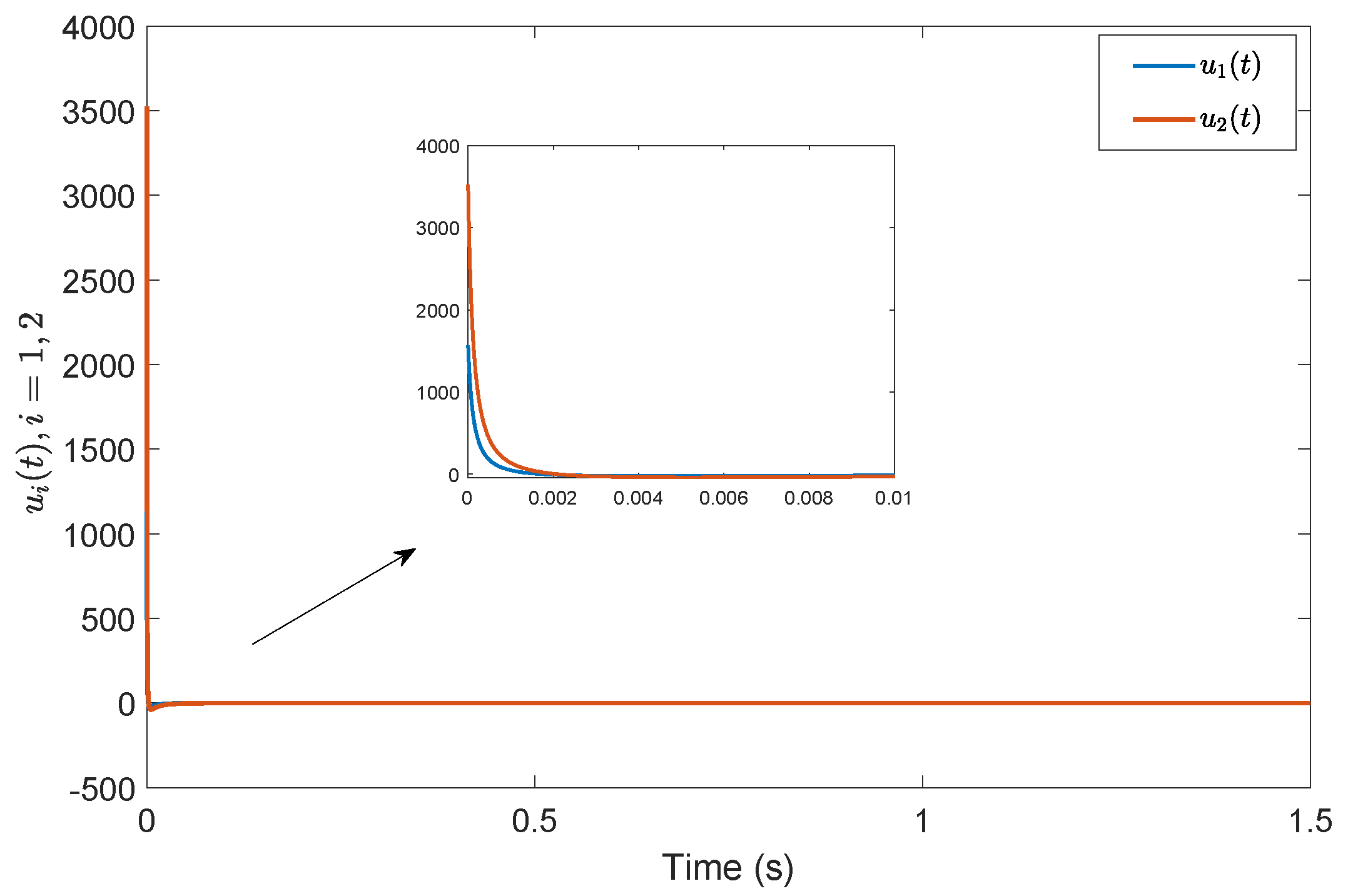
4. Simulation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Proof of Lemma 3
Appendix B. Proof of Theorem 1
Appendix C. Proof of Lemma 4
Appendix D. Proof of Lemma 5
References
- Zheng, Y.; Wang, L. Containment control of heterogeneous multi-agent systems. Int. J. Control 2014, 87, 1–8. [Google Scholar] [CrossRef]
- Cheng, L.; Wang, Y.; Ren, W.; Hou, Z.G.; Tan, M. Containment control of multiagent systems with dynamic leaders based on a PIn-type approach. IEEE Trans. Cybern. 2015, 46, 3004–3017. [Google Scholar] [CrossRef] [PubMed]
- Ning, B.; Han, Q.L.; Zuo, Z.; Jin, J.; Zheng, J. Collective behaviors of mobile robots beyond the nearest neighbor rules with switching topology. IEEE Trans. Cybern. 2018, 48, 1577–1590. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Wang, D.; Wang, W.; Liu, L. Containment control of networked autonomous underwater vehicles: A predictor-based neural DSC design. ISA Trans. 2015, 59, 160–171. [Google Scholar] [CrossRef]
- Ou, M.; Du, H.; Li, S. Finite-time formation control of multiple nonholonomic mobile robots. Int. J. Robust Nonlinear Control 2014, 24, 140–165. [Google Scholar] [CrossRef]
- Du, H.; Zhu, W.; Wen, G.; Wu, D. Finite-time formation control for a group of quadrotor aircraft. Aerosp. Sci. Technol. 2017, 69, 609–616. [Google Scholar] [CrossRef]
- Jin, X. Fault tolerant finite-time leader–follower formation control for autonomous surface vessels with LOS range and angle constraints. Automatica 2016, 68, 228–236. [Google Scholar] [CrossRef]
- Li, S.; Wang, X. Finite-time consensus and collision avoidance control algorithms for multiple AUVs. Automatica 2013, 49, 3359–3367. [Google Scholar] [CrossRef]
- Gao, Z.; Guo, G. Fixed-time leader–follower formation control of autonomous underwater vehicles with event-triggered intermittent communications. IEEE Access 2018, 6, 27902–27911. [Google Scholar] [CrossRef]
- Wang, Y.; Song, Y.; Hill, D.J.; Krstic, M. Prescribed-time consensus and containment control of networked multiagent systems. IEEE Trans. Cybern. 2018, 49, 1138–1147. [Google Scholar] [CrossRef]
- Ning, B.; Han, Q.L. Prescribed finite-time consensus tracking for multiagent systems with nonholonomic chained-form dynamics. IEEE Trans. Autom. Control 2019, 64, 1686–1693. [Google Scholar] [CrossRef]
- Moulay, E.; Perruquetti, W. Finite time stability and stabilization of a class of continuous systems. J. Math. Anal. Appl. 2006, 323, 1430–1443. [Google Scholar] [CrossRef]
- Hong, Y. Finite-time stabilization and stabilizability of a class of controllable systems. Syst. Control Lett. 2002, 46, 231–236. [Google Scholar] [CrossRef]
- Levant, A. Homogeneity approach to high-order sliding mode design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Andrieu, V.; Praly, L.; Astolfi, A. Homogeneous approximation, recursive observer design, and output feedback. SIAM J. Control Optim. 2008, 47, 1814–1850. [Google Scholar] [CrossRef]
- Du, H.; Qian, C.; Yang, S.; Li, S. Recursive design of finite-time convergent observers for a class of time-varying nonlinear systems. Automatica 2013, 49, 601–609. [Google Scholar] [CrossRef]
- Holloway, J.C.; Krstic, M. Prescribed-time observers for linear systems in observer canonical form. IEEE Trans. Autom. Control 2019. [Google Scholar] [CrossRef]
- Song, Y.; Wang, Y.; Holloway, J.; Krstic, M. Time-varying feedback for regulation of normal-form nonlinear systems in prescribed finite-time. Automatica 2017, 83, 243–251. [Google Scholar] [CrossRef]
- Holloway, J.; Krstic, M. Prescribed-time output feedback for linear systems in controllable canonical form. Automatica 2019, 107, 77–85. [Google Scholar] [CrossRef]
- Polyakov, A.; Efimov, D.; Perruquetti, W. Robust stabilization of MIMO systems in finite/fixed-time. Int. J. Robust Nonlinear Control 2016, 26, 69–90. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Convex Analysis; Princeton University Press: Princeton, NJ, USA, 1970. [Google Scholar]
- Liu, H.; Xie, G.; Wang, L. Necessary and sufficient conditions for containment control of networked multi-agent systems. Automatica 2012, 48, 1415–1422. [Google Scholar] [CrossRef]
- Meng, Z.; Ren, W.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar] [CrossRef]
- Drakunov, S.V.; Izosimov, D.B.; Luk’yanov, A.G.; Utkin, V.A.; Utkin, V.I. Block control principle. ii. Autom. Remote Control 1990, 51, 737–746. [Google Scholar]
- Polyakov, A.; Efimov, D.; Perruquetti, W. Sliding mode control design for mimo systems: Implicit lyapunov function approach. In Proceedings of the 2014 European Control Conference (ECC), Strasbourg, France, 24–27 June 2014; pp. 2612–2617. [Google Scholar]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2011, 57, 2106–2110. [Google Scholar] [CrossRef]
- Cui, R.; Ge, S.S.; How, B.V.; Choo, Y.S. Leader–follower formation control of underactuated autonomous underwater vehicles. Ocean Eng. 2010, 37, 1491–1502. [Google Scholar] [CrossRef]
- Reyhanoglu, M. Control and Stabilization of An Underactuated Surface Vessel. In Proceedings of the 35th IEEE Conference on Decision Control, Kobe, Japan, 13 December 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 3, pp. 2371–2376. [Google Scholar]
- Yang, H.; Zhang, F. Robust control of formation dynamics for autonomous underwater vehicles in horizontal plane. J. Dyn. Syst. Meas. Control 2012, 134, 031009. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, G.H. Integrated design of fault estimation and fault-tolerant control for linear multi-agent systems using relative outputs. Neurocomputing 2019, 329, 468–475. [Google Scholar] [CrossRef]

















© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, T.; Yu, S. Fixed-Time Observer Based Prescribed-Time Containment Control of Unmanned Underwater Vehicles with Faults and Uncertainties. Sensors 2019, 19, 4515. https://doi.org/10.3390/s19204515
Yang T, Yu S. Fixed-Time Observer Based Prescribed-Time Containment Control of Unmanned Underwater Vehicles with Faults and Uncertainties. Sensors. 2019; 19(20):4515. https://doi.org/10.3390/s19204515
Chicago/Turabian StyleYang, Tingting, and Shuanghe Yu. 2019. "Fixed-Time Observer Based Prescribed-Time Containment Control of Unmanned Underwater Vehicles with Faults and Uncertainties" Sensors 19, no. 20: 4515. https://doi.org/10.3390/s19204515
APA StyleYang, T., & Yu, S. (2019). Fixed-Time Observer Based Prescribed-Time Containment Control of Unmanned Underwater Vehicles with Faults and Uncertainties. Sensors, 19(20), 4515. https://doi.org/10.3390/s19204515