Virtualization of Industrial Real-Time Networks for Containerized Controllers


Abstract
1. Introduction
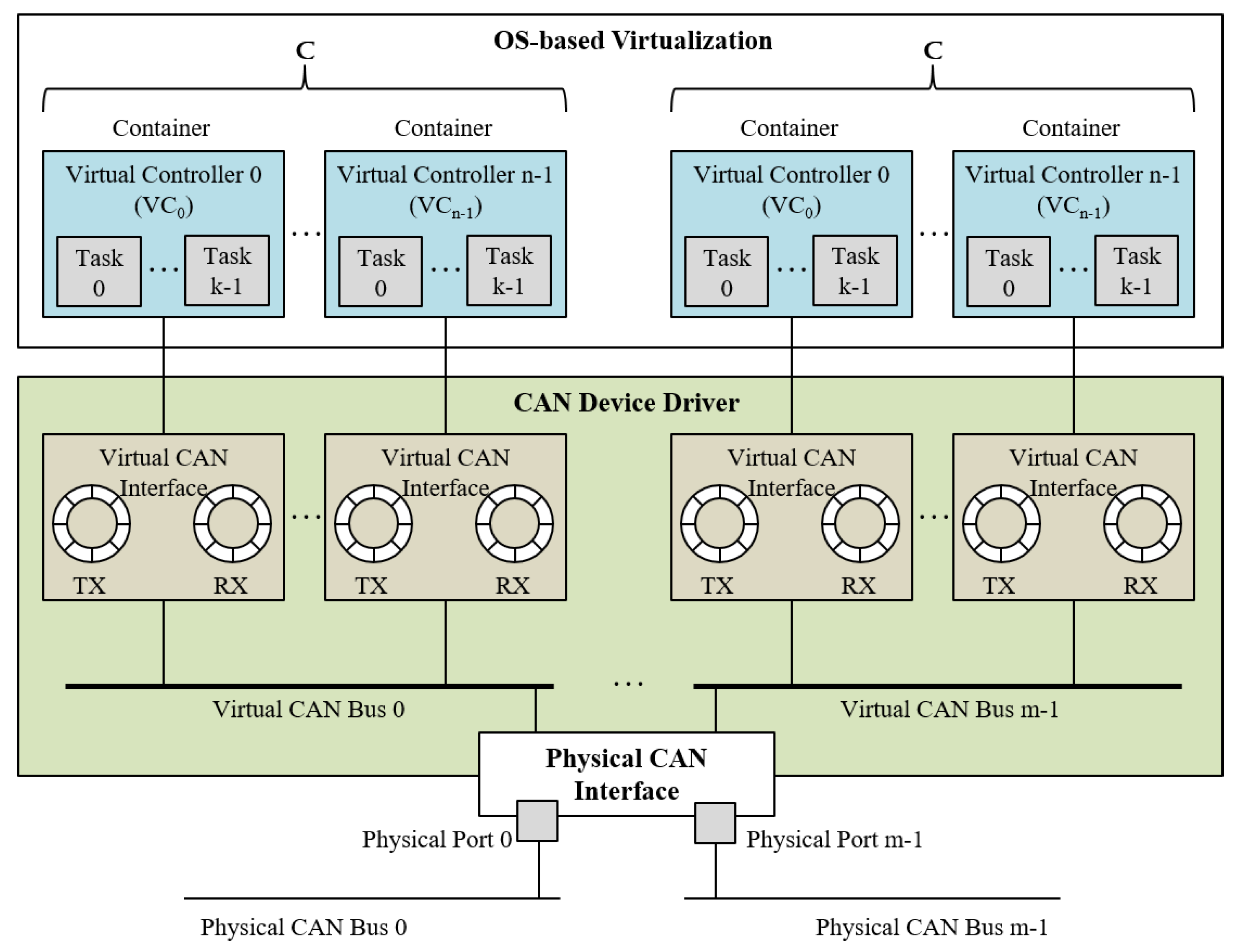
- Support for sharing of the network interface: In order to allow several virtual controllers to share a physical CAN network interface in an isolated manner, the run-time support should be capable of multiplexing and demultiplexing the input/output (I/O) requests from multiple virtual controllers. However, the protocol stacks of CAN (i.e., CANopen [15]) implicitly assume that the CAN network interface can be dedicated to only one software controller.
- Emulation of the media access control: The characteristics of CAN are significantly different from general purpose networks. For example, the CAN message identifier is used in bus arbitration; that is, it is considered as a priority for bus arbitration. Thus, such characteristics have to be emulated in virtualized environments to preserve the behavior of controllers.
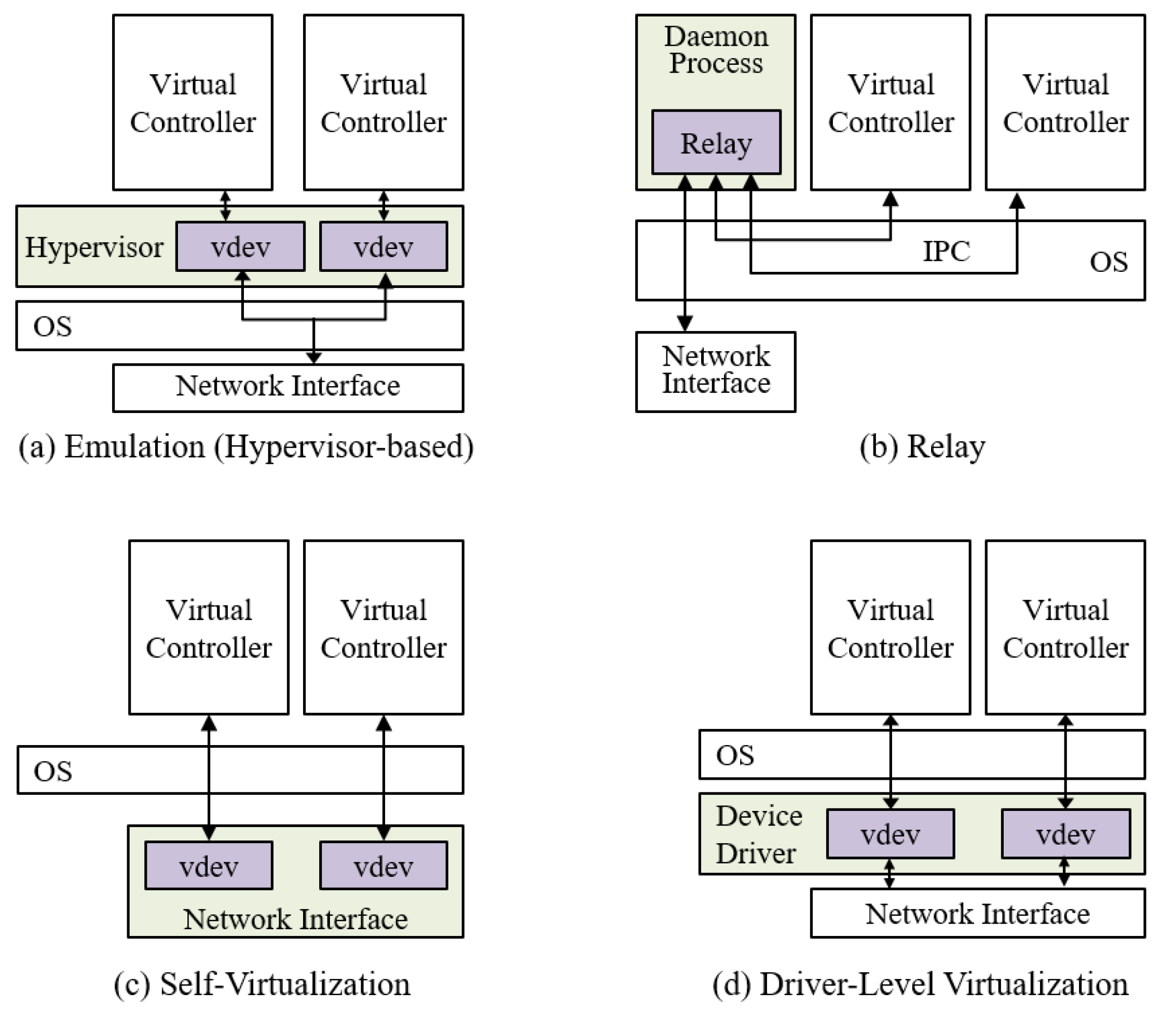
- Low virtualization overheads: As the traditional hypervisor-based virtualization (e.g., Xen [4], VMware [16], and VirtualBox [17]) adds significant run-time overheads, the operating-system (OS)-based virtualization (e.g., Container [18,19]) is emerging. Accordingly, we need a CAN virtualization technology that can be incorporated into the OS-based virtualization aiming to minimize the virtualization overheads.
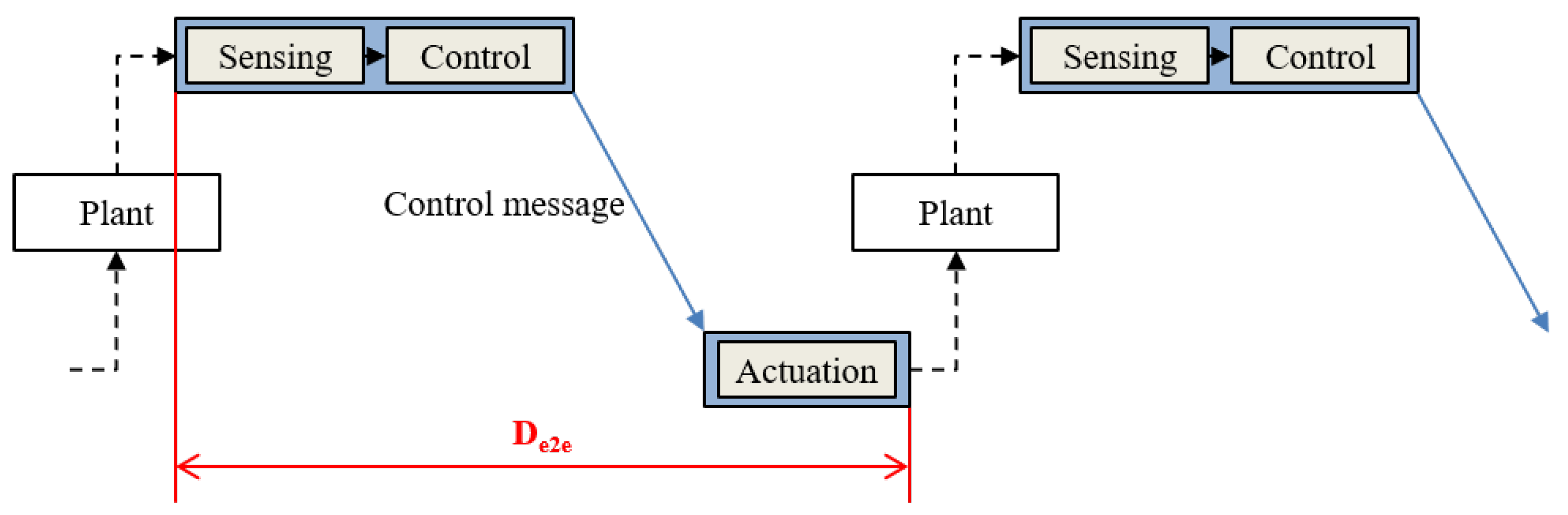
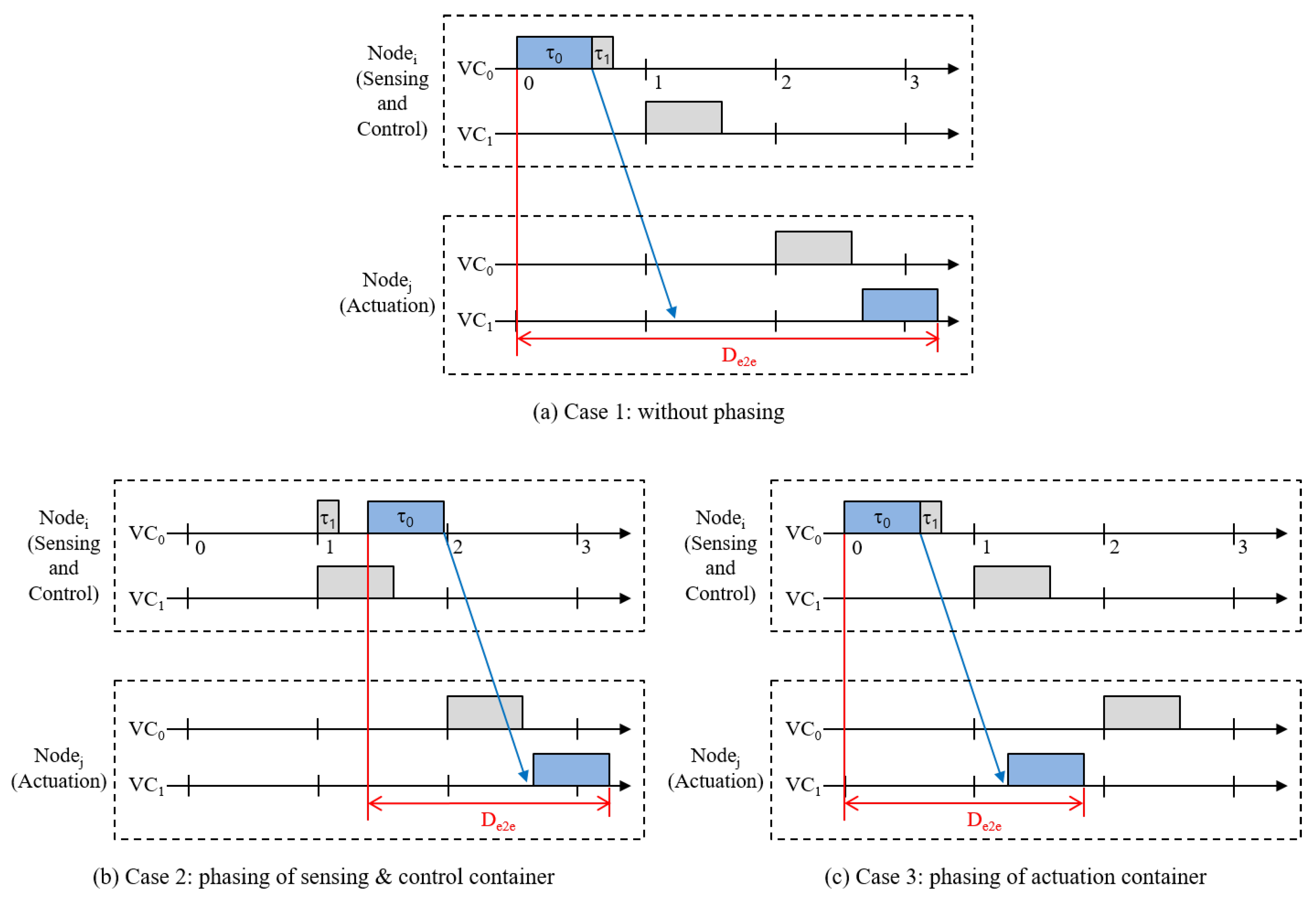
- Analysis of end-to-end delay: In virtualized environments, multiple virtual controllers share the CPU resources; thus, the end-to-end delay of control loop highly depends on how the virtual controllers are scheduled. Therefore, we need a mechanism to analyze the worst-case end-to-end delay and minimize it to satisfy the requirements on real-time.
2. Related Work
3. Virtualization of Controller Area Network
3.1. Design Issues
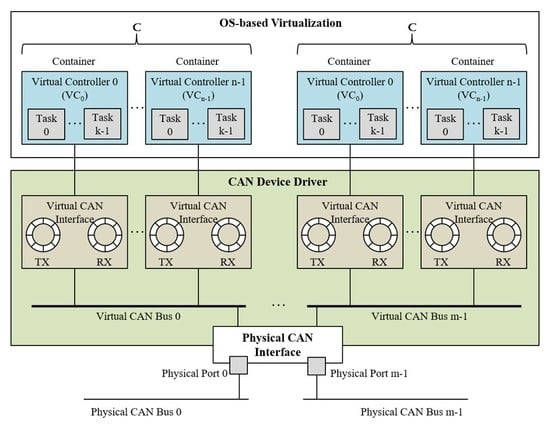
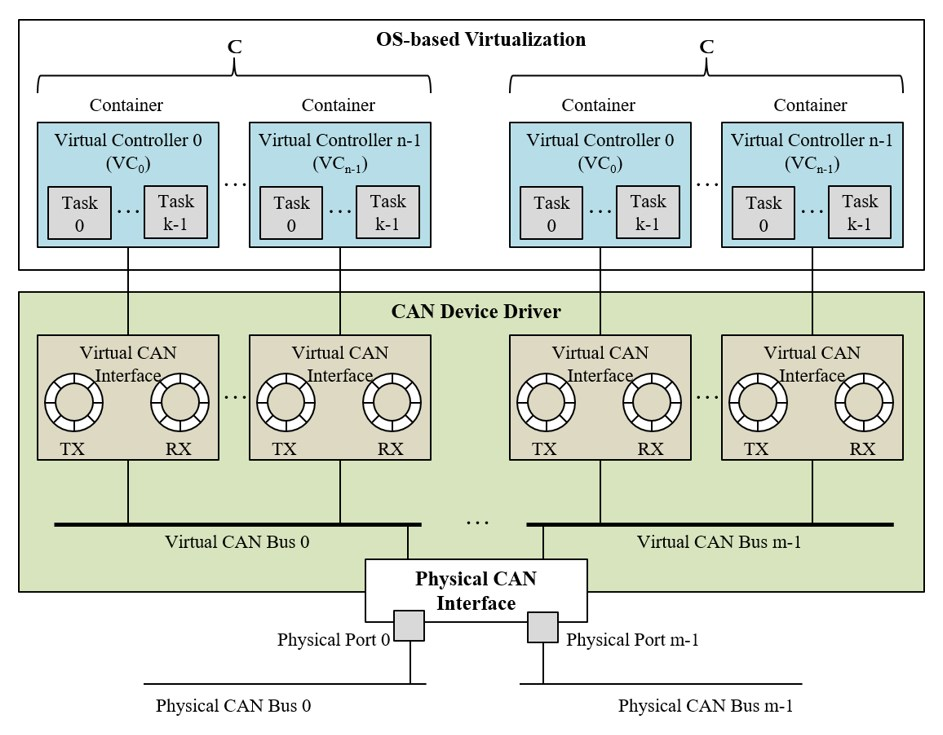
3.2. Driver-Level CAN Virtualization
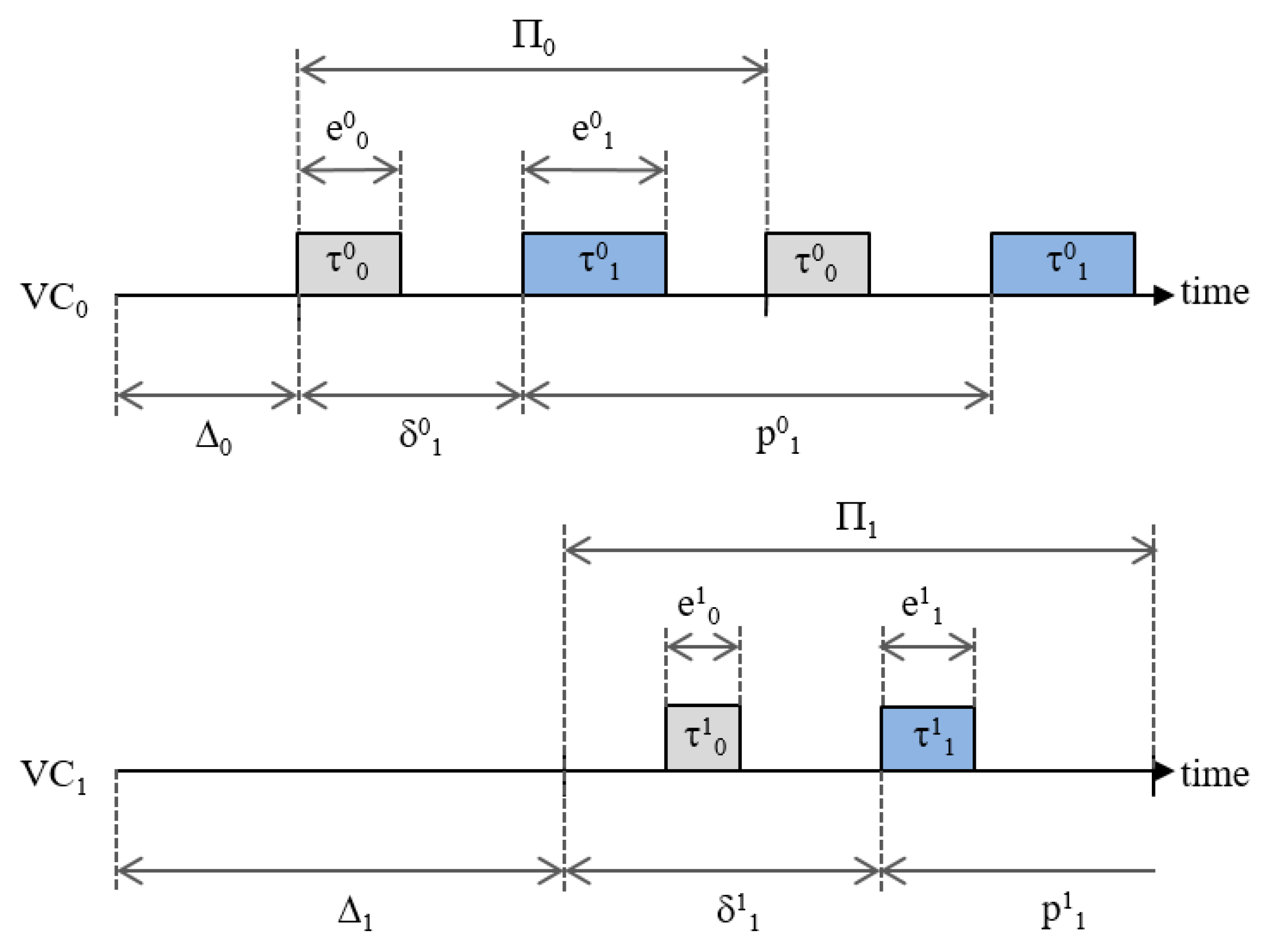
3.3. Hierarchical Real-Time Scheduling
3.4. Phasing of Virtual Controllers and Tasks
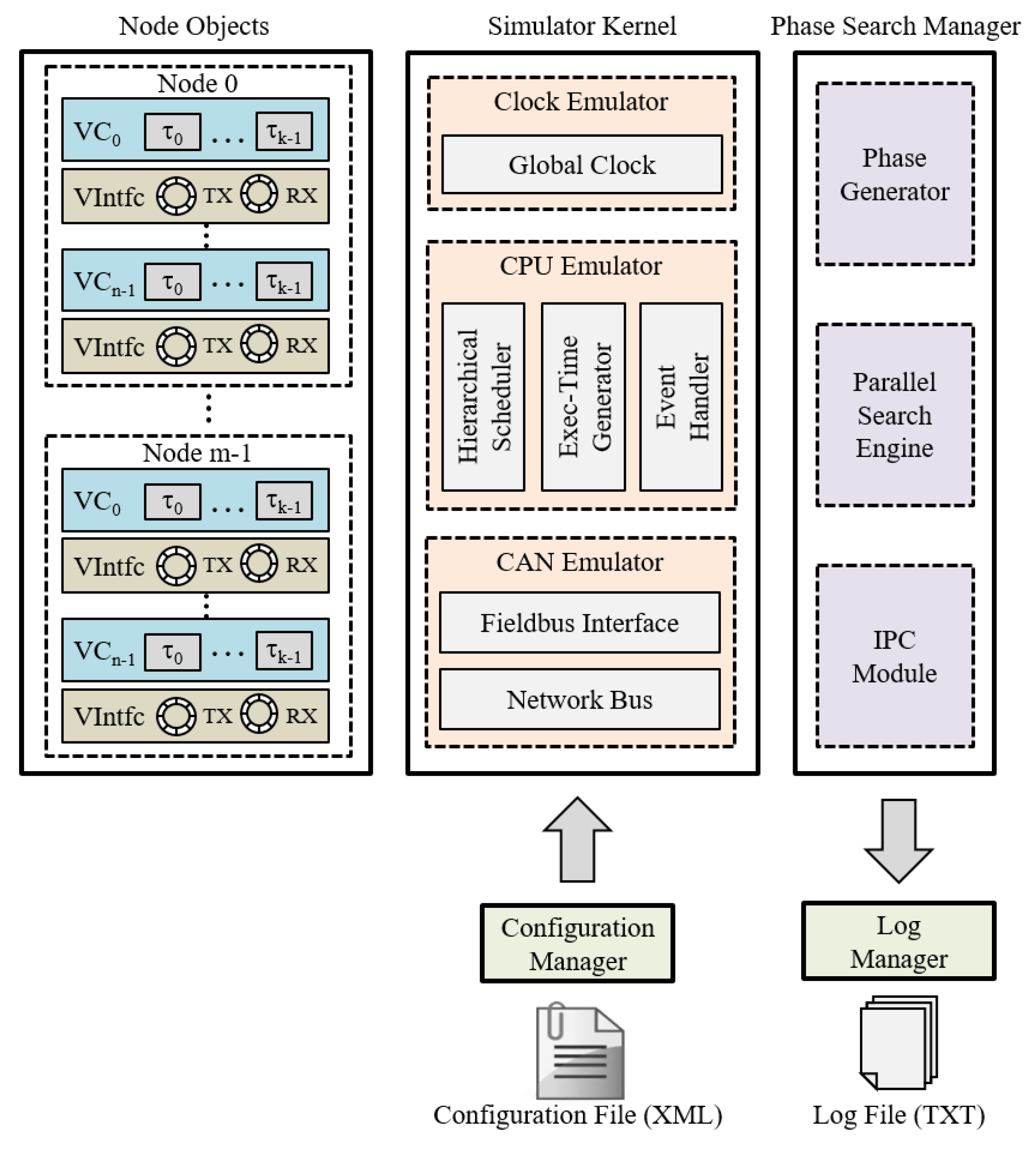
3.5. Implementation
3.6. Summary
4. Experimental Results
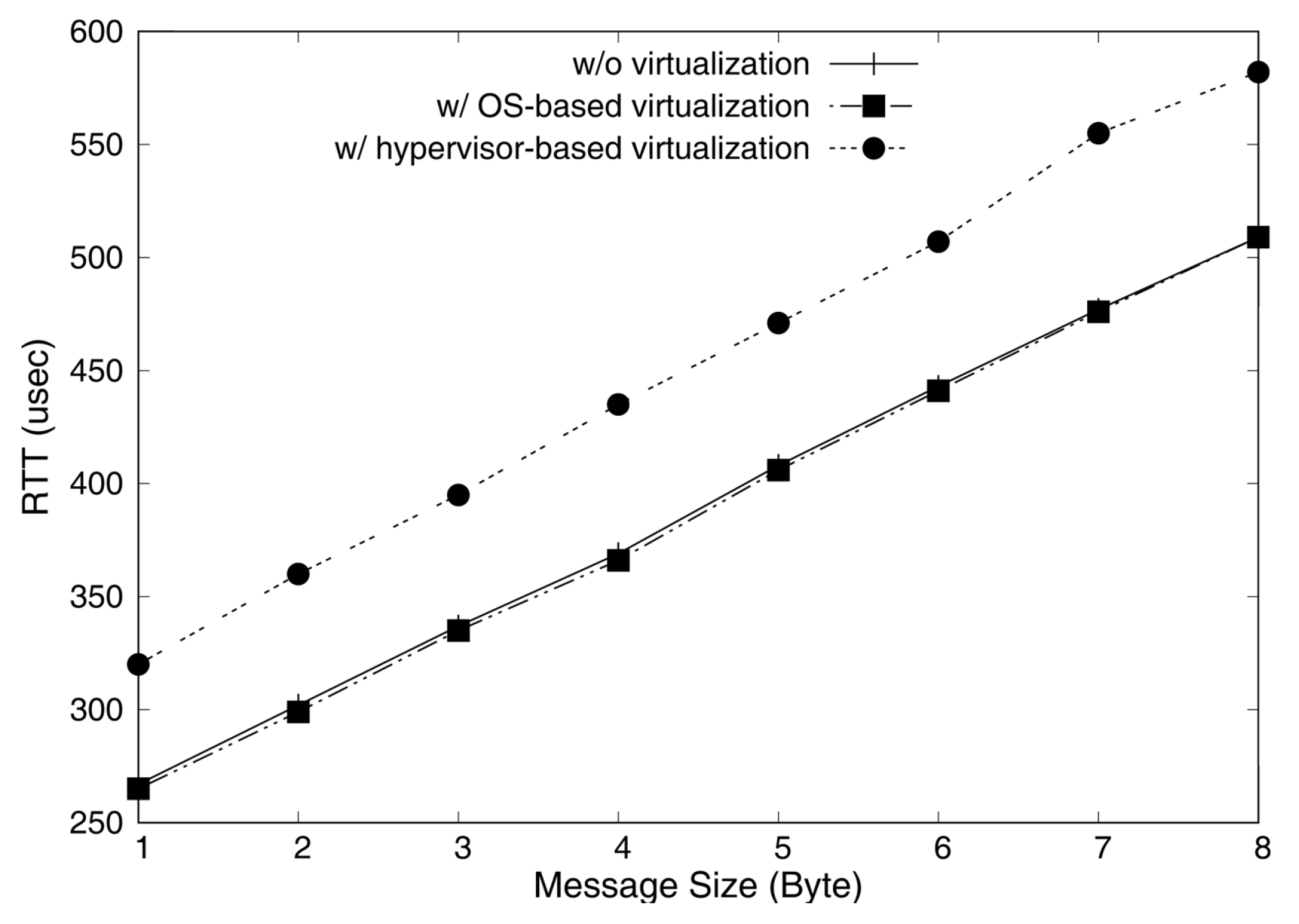
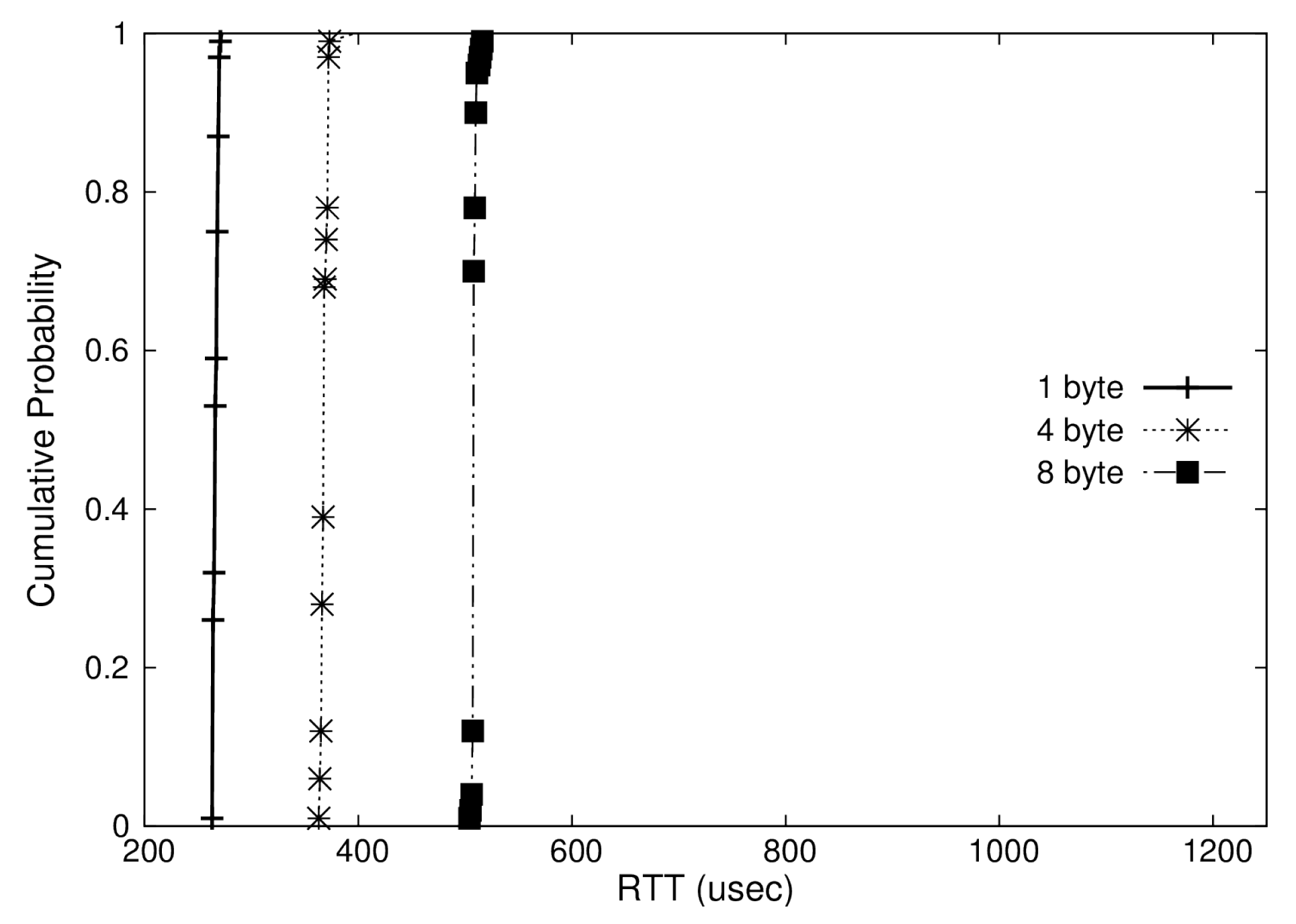
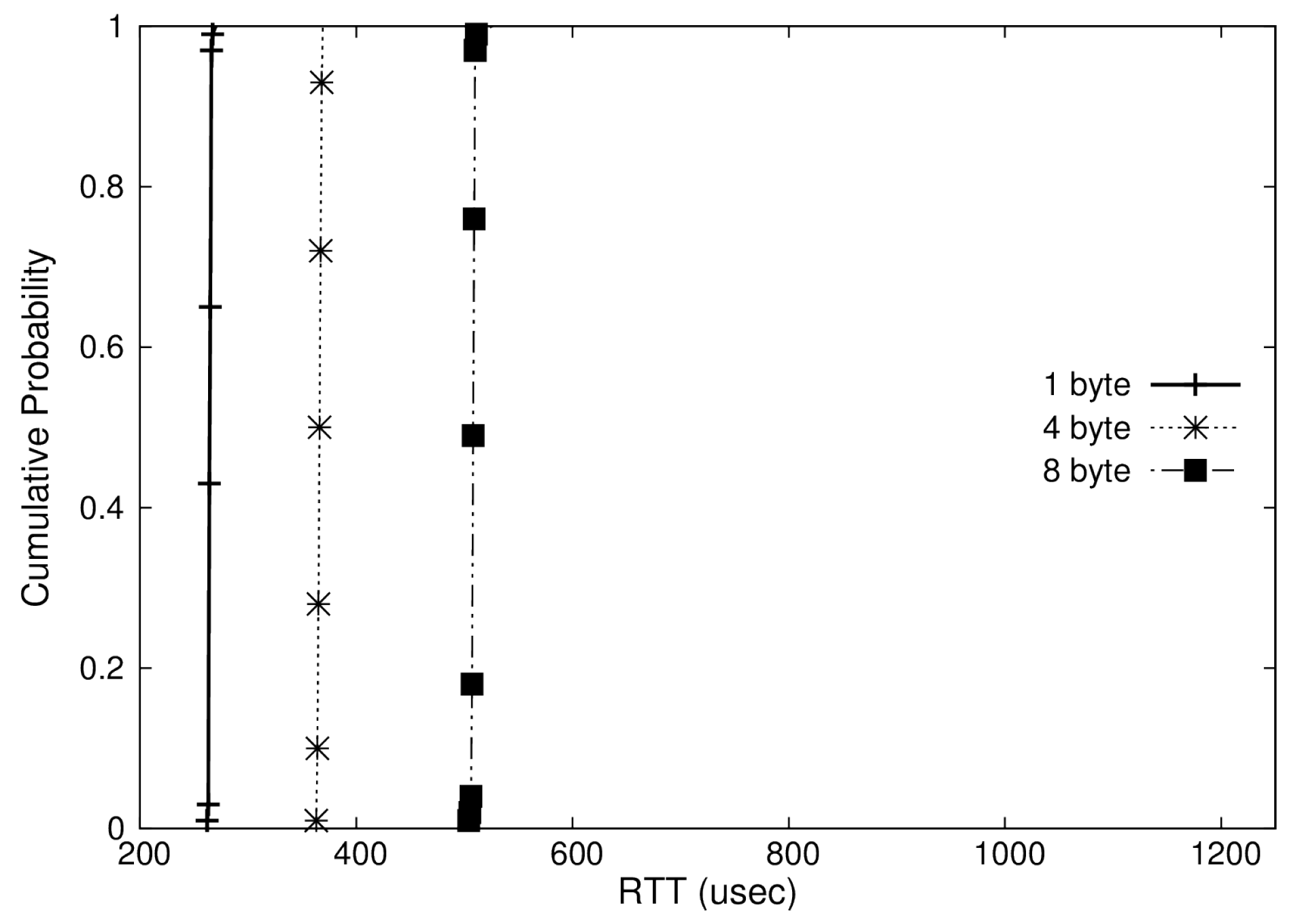
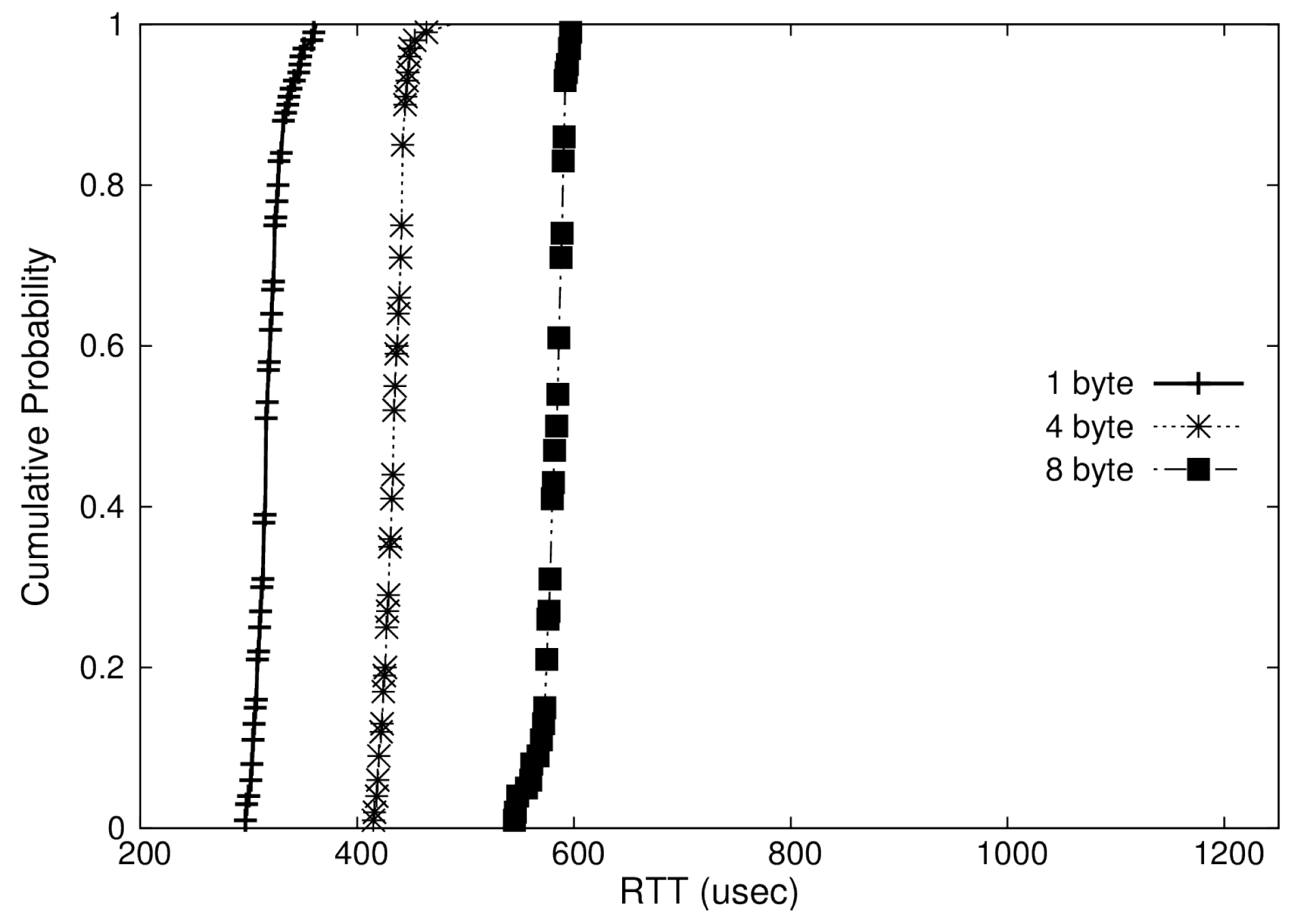
4.1. Comparisons with Hypervisor-Based Virtualization
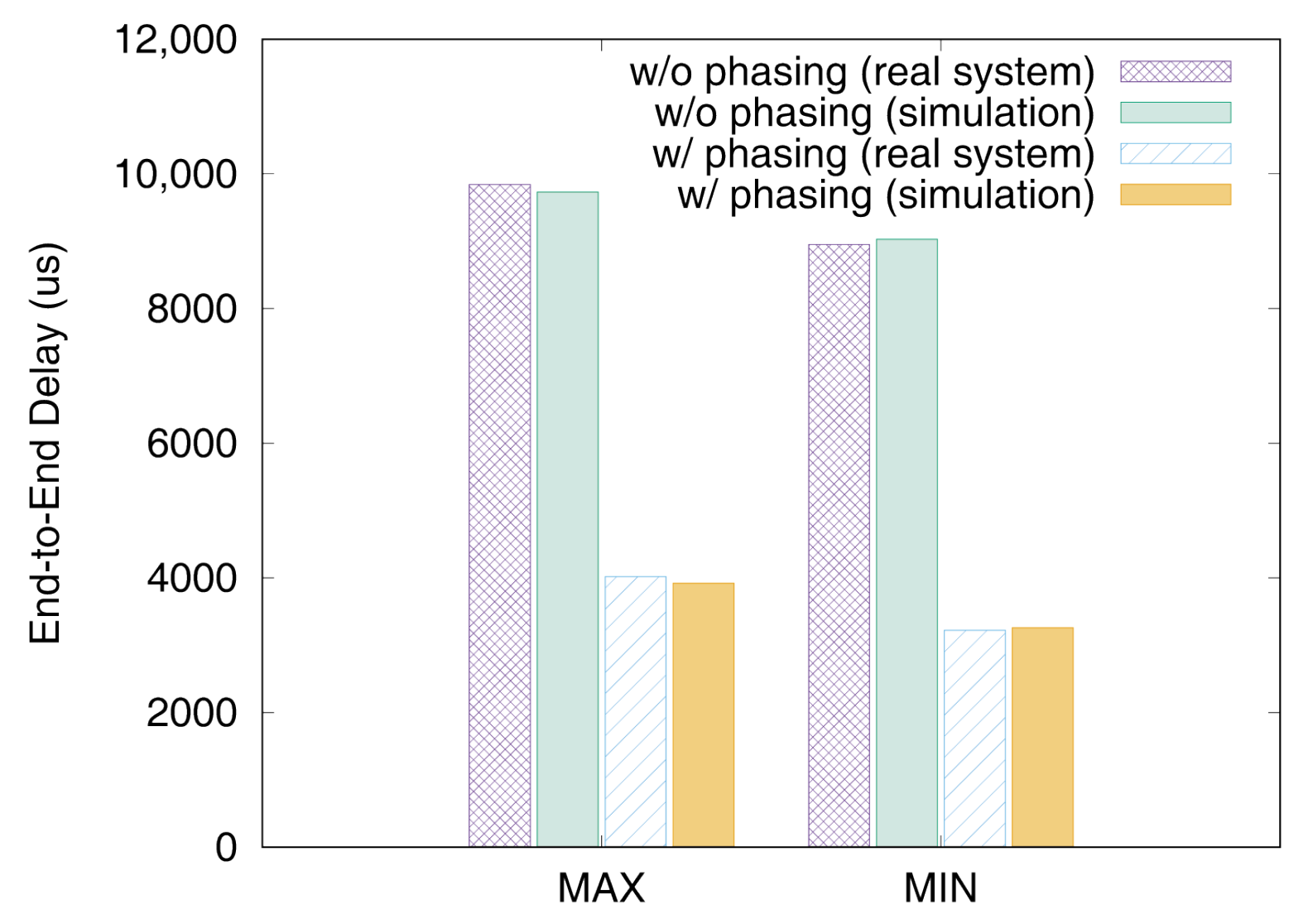
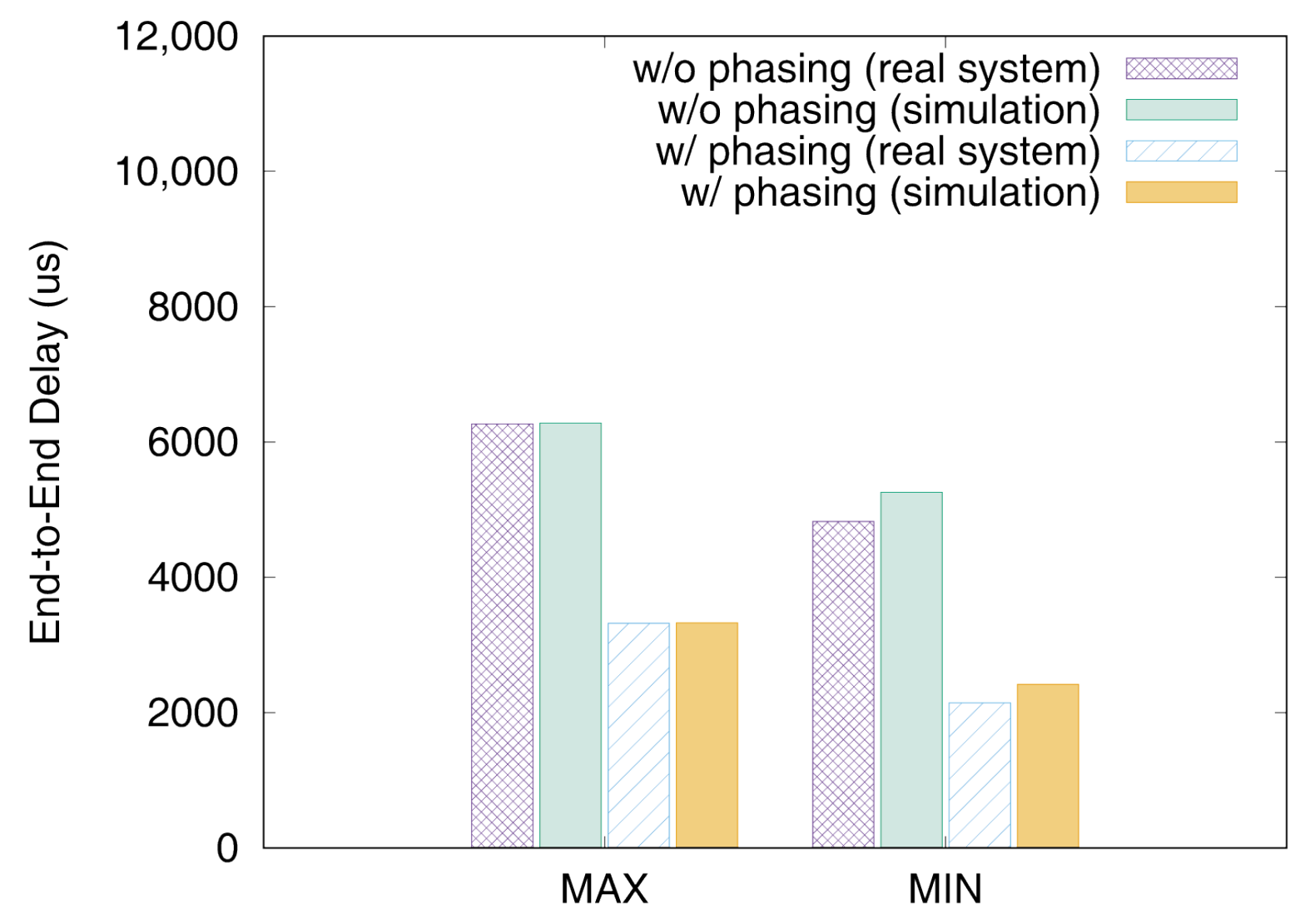
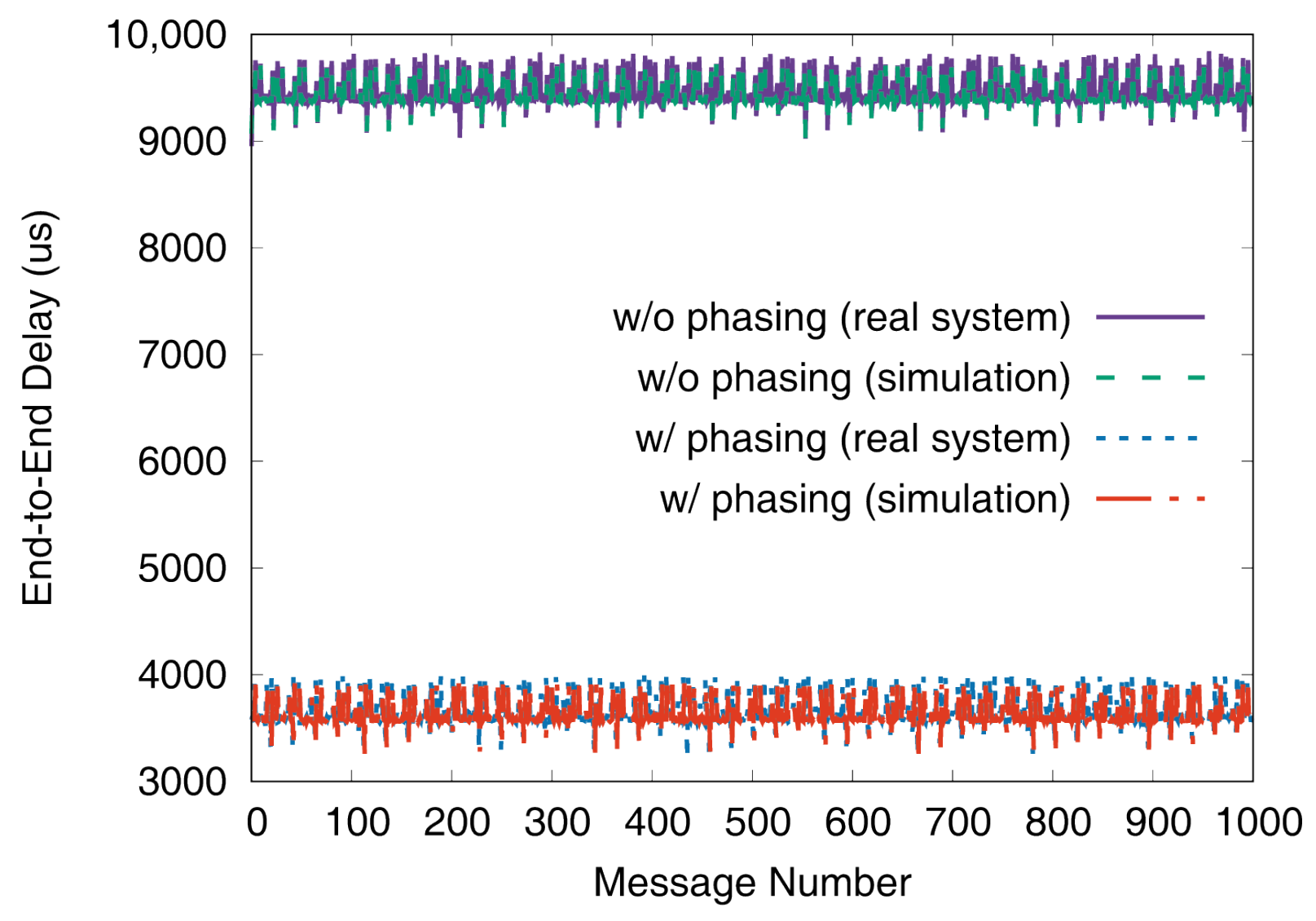
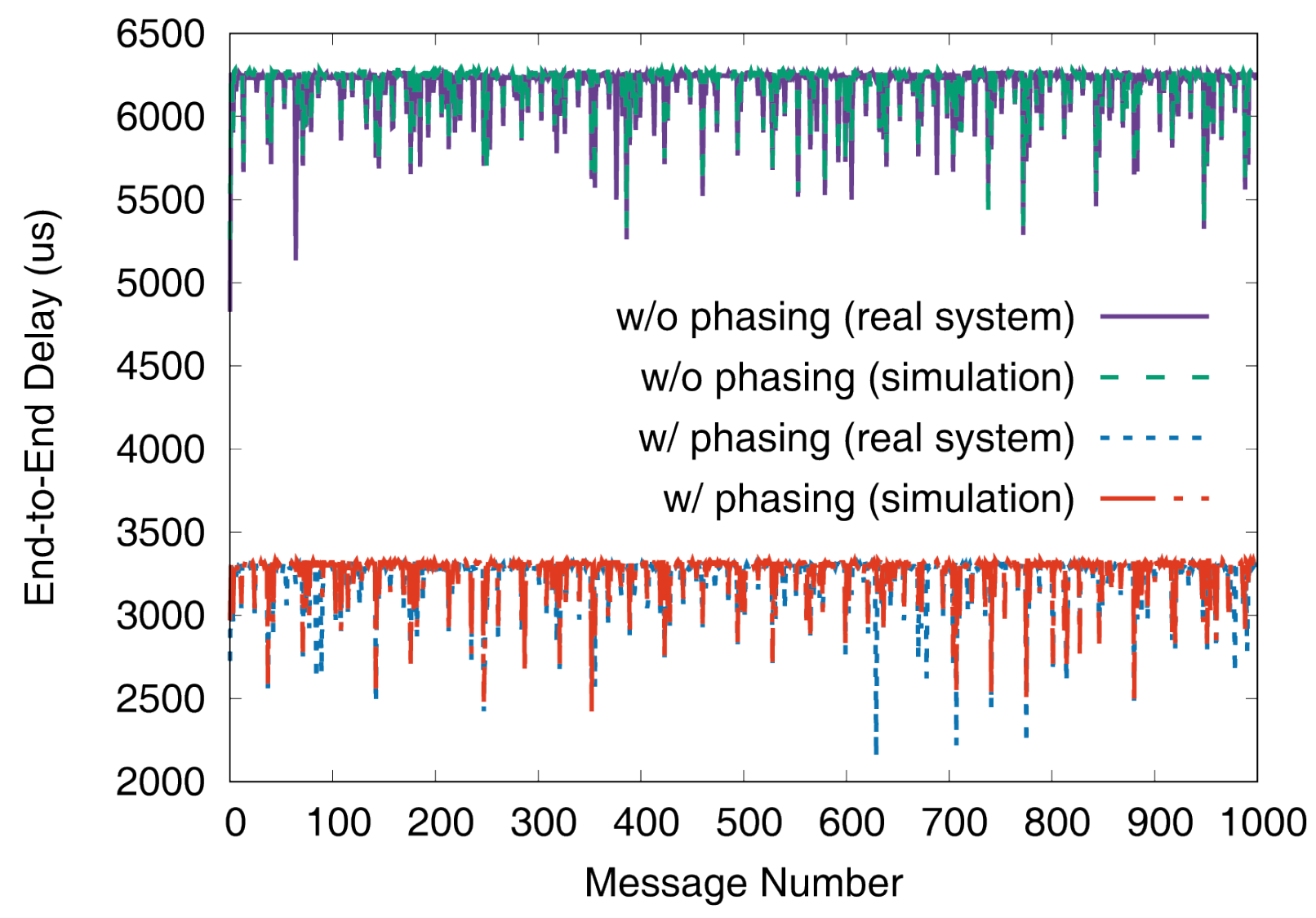
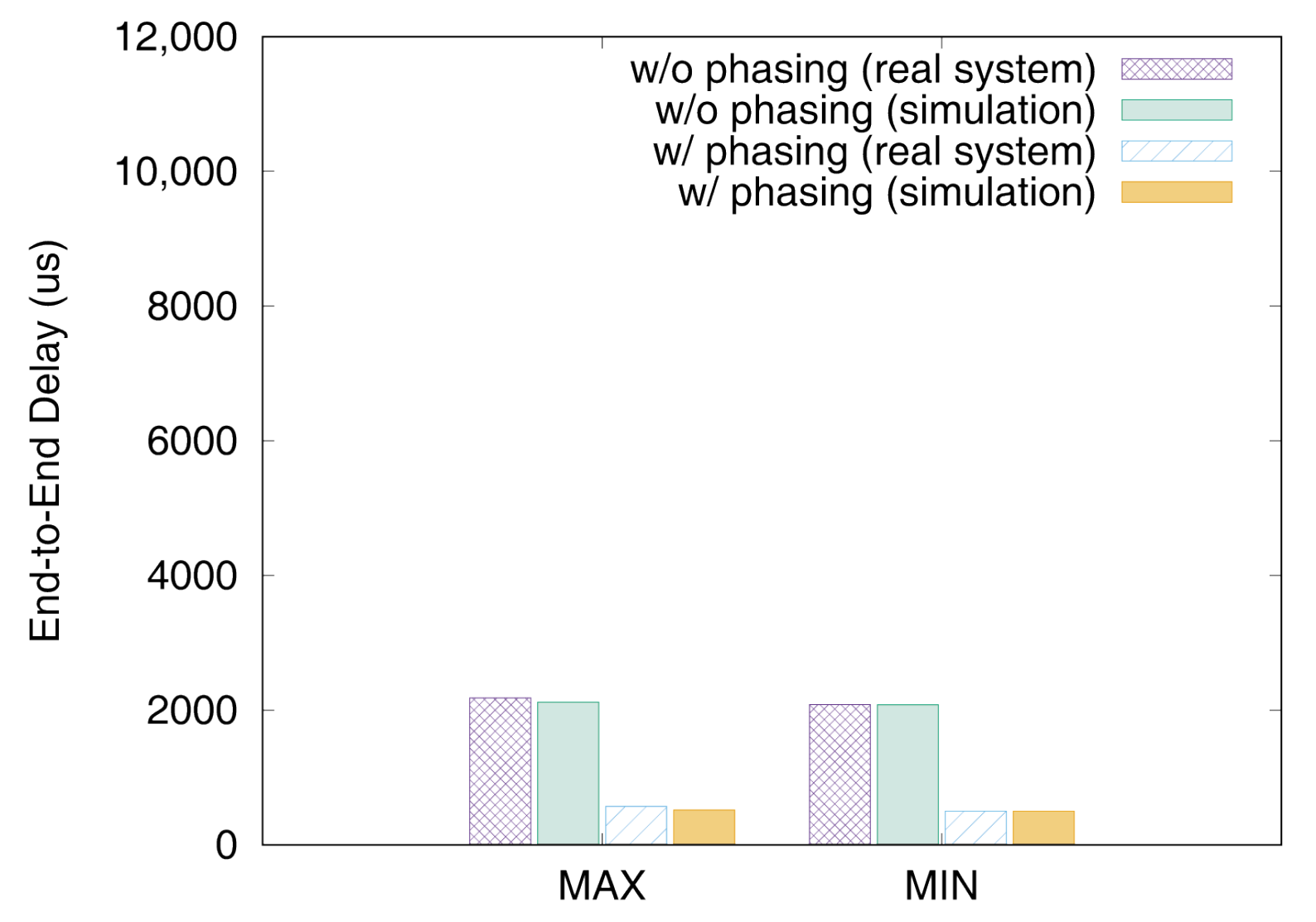
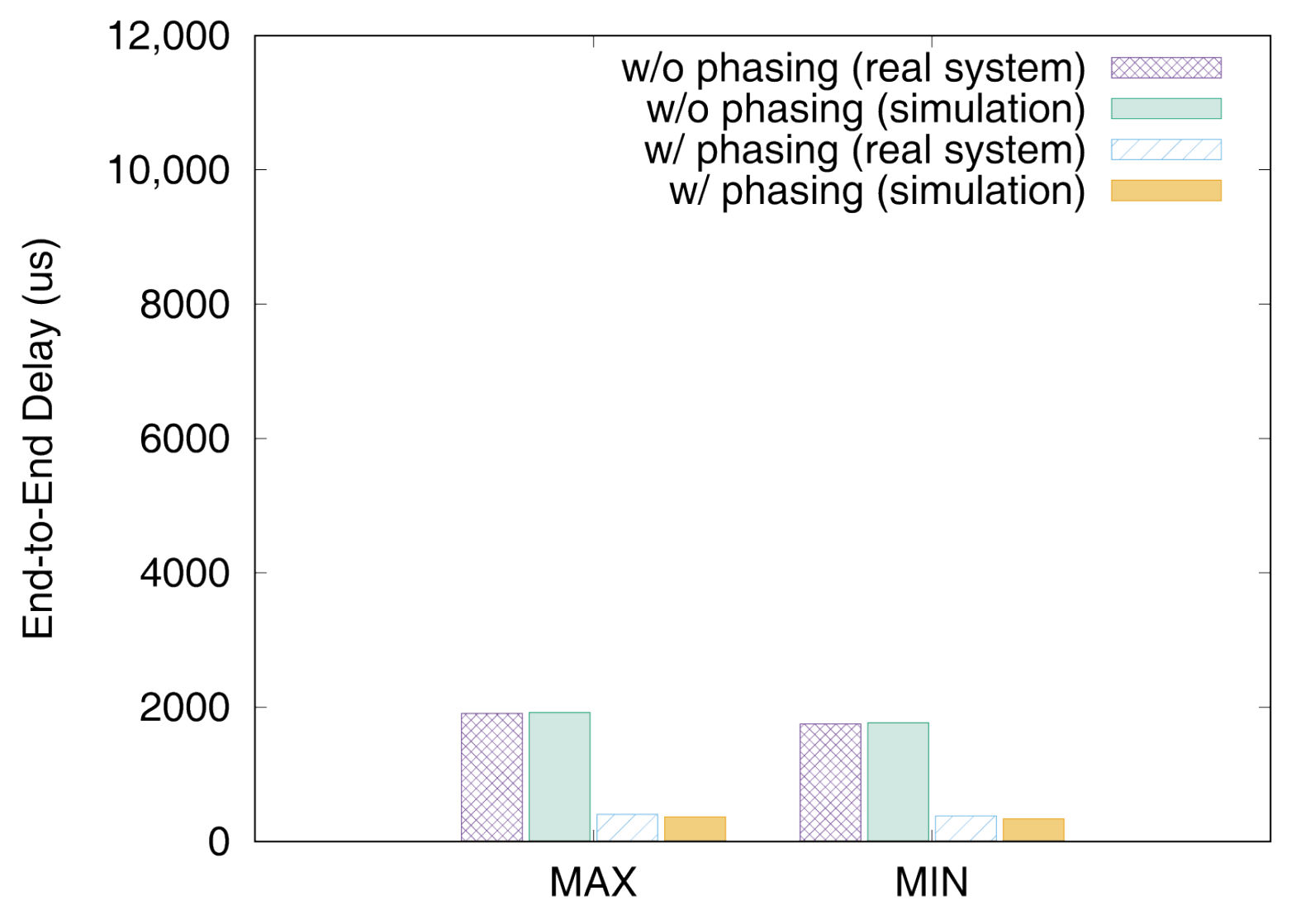
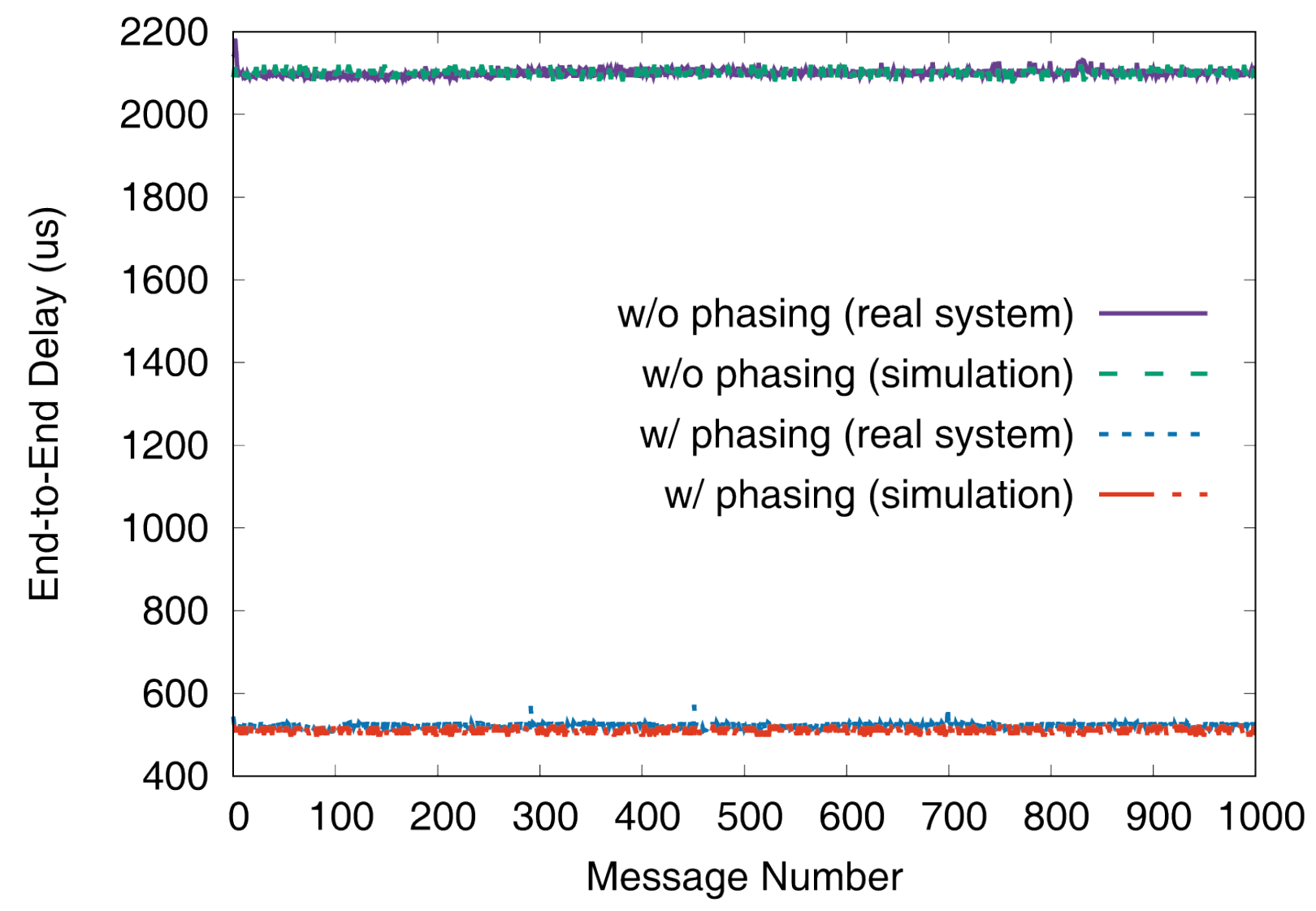
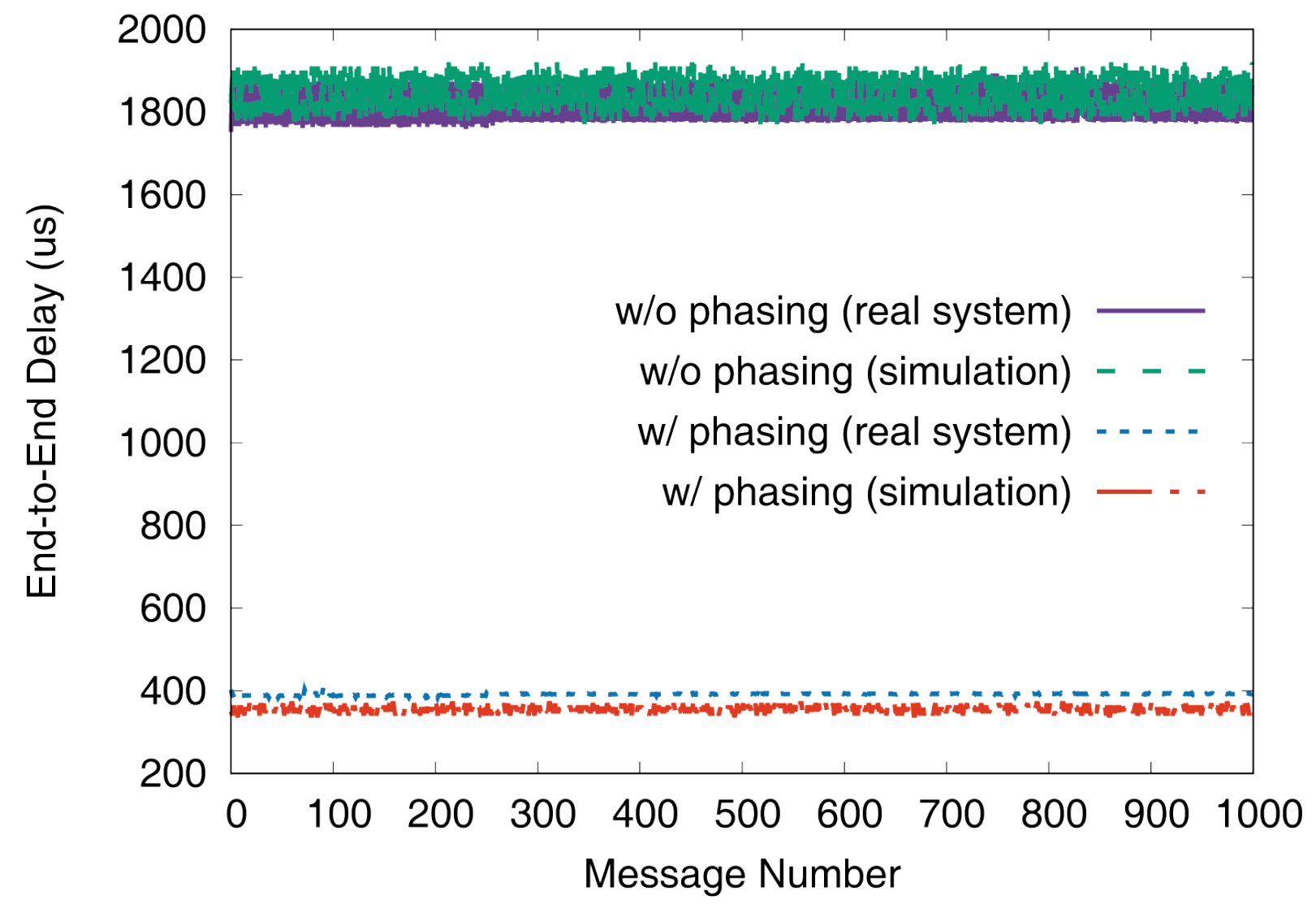
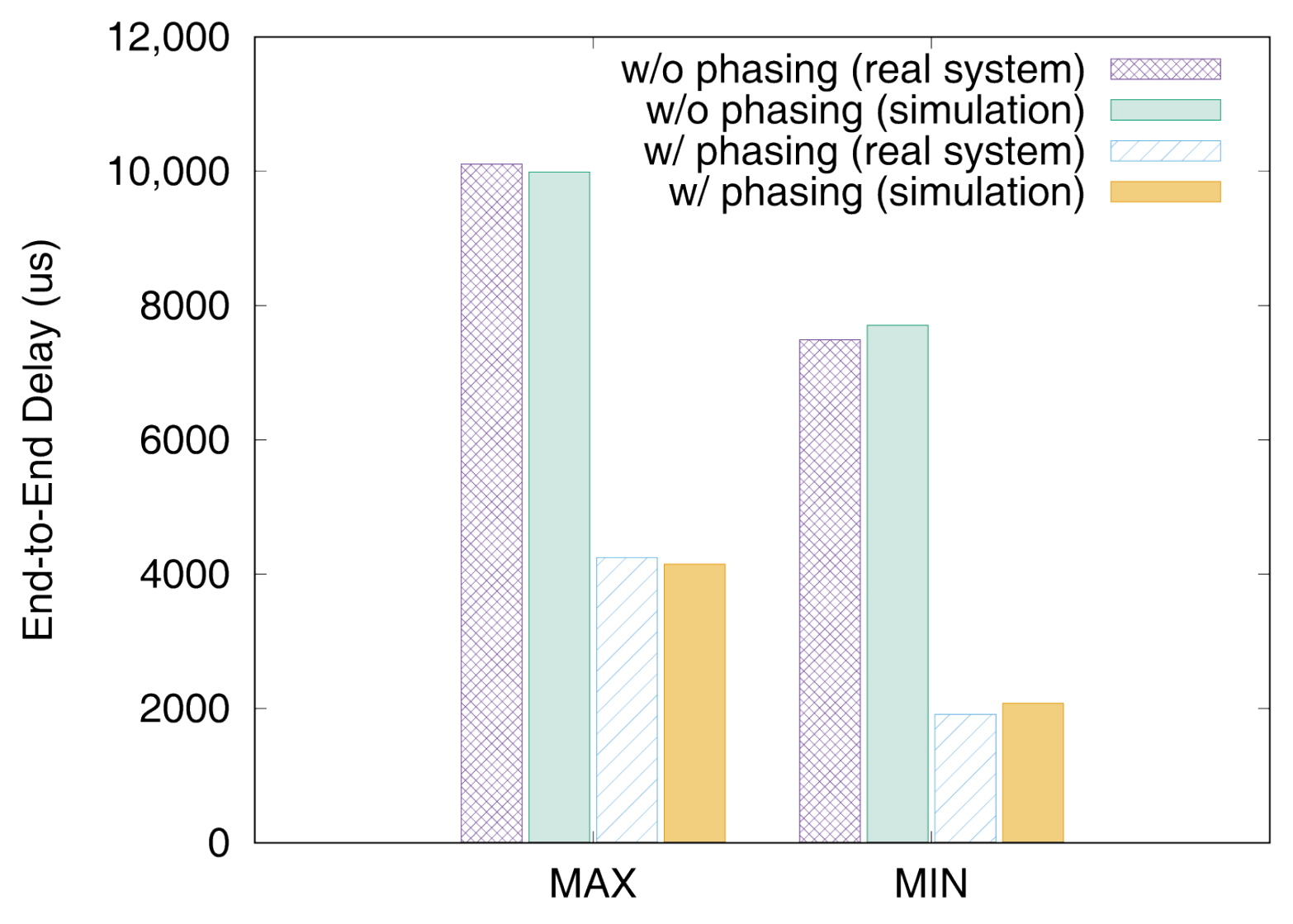
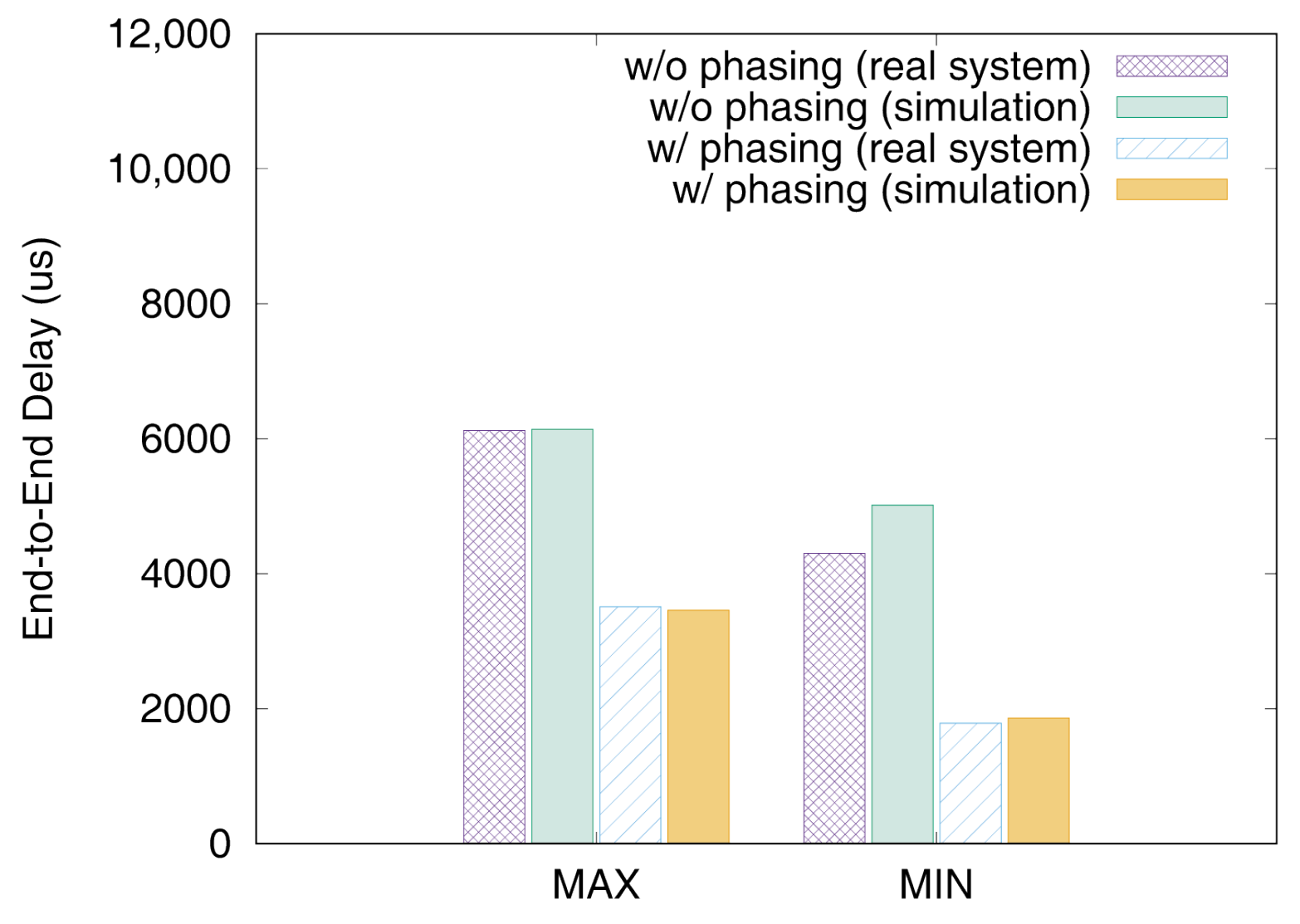
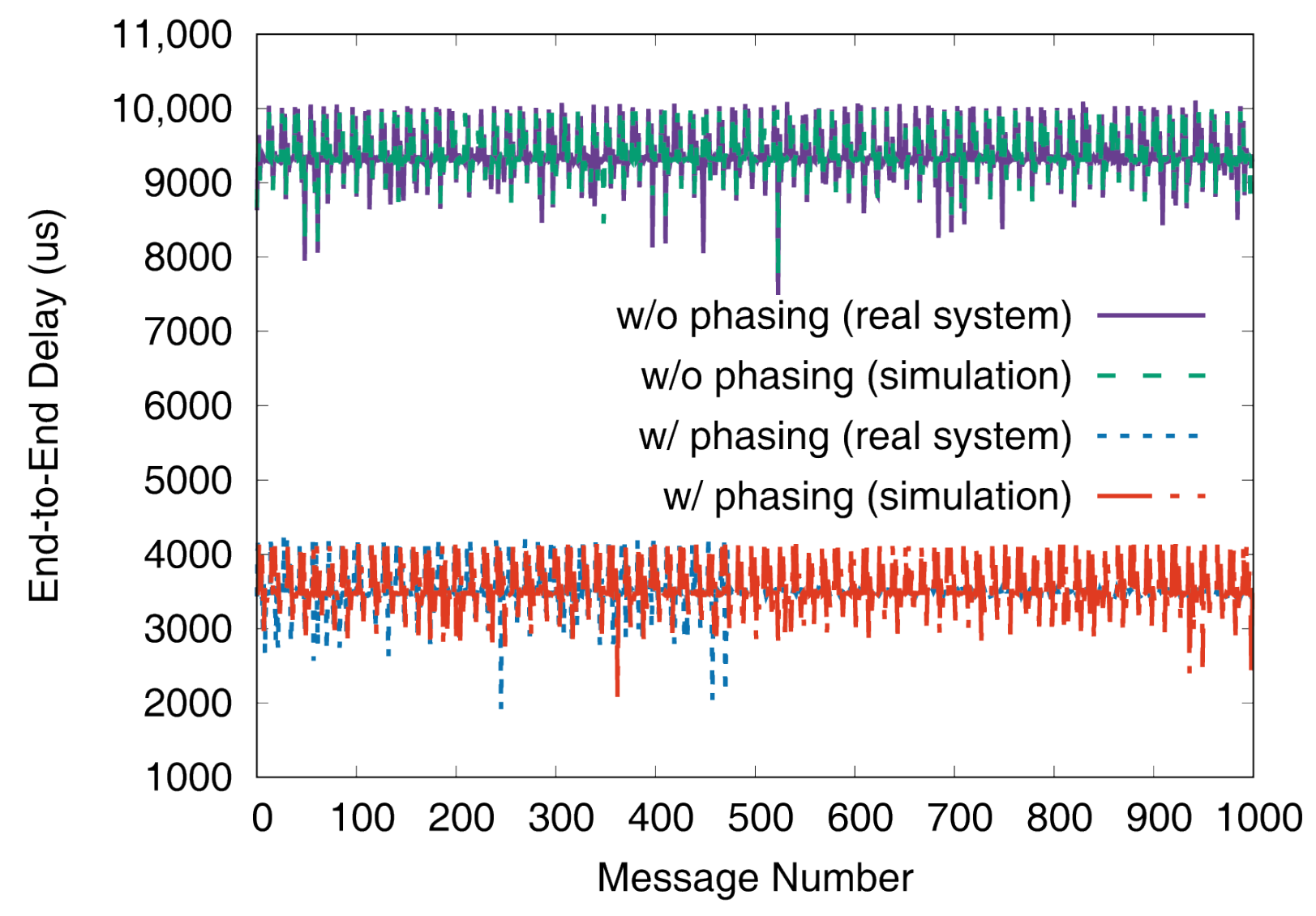
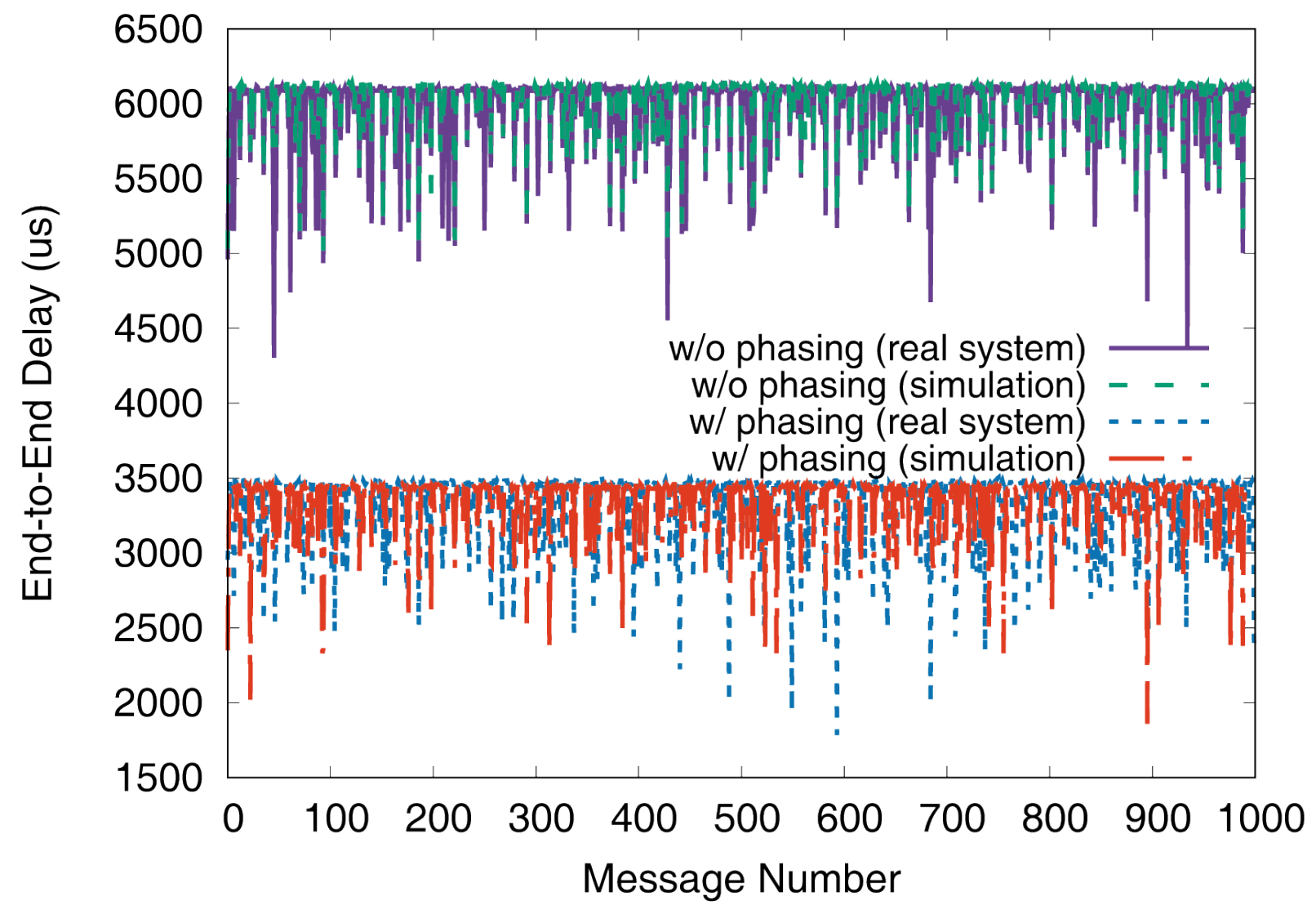
4.2. Analysis of Worst-Case End-to-End Delay
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CAN | Controller Area Network |
| CFD | Cumulative Distribution Function |
| cgroup | Control Group |
| DMA | Direct Memory Access |
| HMI | Human–Machine Interface |
| I/O | Input/Output |
| OS | Operating System |
| PLC | Programmable Logic Controller |
| QoS | Quality-of-Service |
| RM | Rate Monotonic |
| RTT | Round-Trip-Time |
| SCADA | Supervisory Control and Data Acquisition |
| SDN | Software-Defined Networking |
| TCP/IP | Transmission Control Protocol/Internet Protocol |
| VC | Virtual Controller |
| VMM | Virtual Machine Monitor |
References
- Goldschmidt, T.; Murugaiah, M.K.; Sonntag, C.; Schlich, B.; Biallas, S.; Weber, P. Cloud-based control: A multi-tenant, horizontally scalable soft-PLC. In Proceedings of the 8th IEEE International Conference on Cloud Computing (CLOUD 2015), New York, NY, USA, 27 June–2 July 2015; pp. 909–916. [Google Scholar]
- Givehchi, O.; Imtiaz, J.; Trsek, H.; Jasperneite, J. Control-as-a-service from the cloud: A case study for using virtualized PLCs. In Proceedings of the 10th IEEE Workshop on Factory Communication Systems (WFCS 2014), Toulouse, France, 5–7 May 2014. [Google Scholar]
- Tasci, T.; Melcher, J.; Verl, A. A container-based architecture for real-time control applications. In Proceedings of the 2018 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Stuttgart, Germany, 17–20 June 2018. [Google Scholar]
- Barham, P.; Dragovic, B.; Fraser, K.; Hand, S.; Harris, T.; Ho, A.; Neugebauer, R.; Pratt, I.; Warfield, A. Xen and the art of virtualization. ACM SIGOPS Oper. Syst. Rev. 2003, 37, 164–177. [Google Scholar] [CrossRef]
- Sugerman, J.; Venkitachalam, G.; Lim, B.-H. Virtualizing I/O devices on Vmware workstation’s hosted virtual machine monitor. In Proceedings of the USENIX Annual Technical Conference, Boston, MA, USA, 25–30 June 2001. [Google Scholar]
- Raj, H.; Schwan, K. High performance and scalable I/O virtualization via self-virtualized devices. In Proceedings of the International Symposium on High Performance Distributed Computing (HPDC 07), Monterey, CA, USA, 25–29 June 2007. [Google Scholar]
- Santos, J.R.; Turner, Y.; Janakiraman, G.; Pratt, I. Bridging the gap between software and hardware techniques for I/O virtualization. In Proceedings of the USENIX Annual Technical Conference, Boston, MA, USA, 22–27 June 2008; pp. 22–27. [Google Scholar]
- Russell, R. Virtio: Towards a de-facto standard for virtual I/O devices. ACM SIGOPS Oper. Syst. Rev. 2008, 42, 342–355. [Google Scholar] [CrossRef]
- Ram, K.K.; Santos, J.R.; Turner, Y.; Cox, A.L.; Rixner, S. Achieving 10Gbps using safe and transparent network interface virtualization. In Proceedings of the International Conference on Virtual Execution Environments (VEE 09), Washington, DC, USA, 11–13 March 2009. [Google Scholar]
- Li, J.; Xue, S.; Zhang, W.; Qi, Z. When I/O interrupt becomes system bottleneck: Efficiency and scalability enhancement for SR-IOV network virtualization. IEEE Trans. Cloud Comput. 2017. [Google Scholar] [CrossRef]
- Jose, J.; Li, M.; Lu, X.; Kandalla, K.C.; Arnold, M.D.; Panda, D.K. SR-IOV support for virtualization on Infiniband clusters: Early experience. In Proceedings of the 13th IEEE/ACM International Symposium on Cluster, Cloud, and Grid Computing (CCGrid 2013), Delft, The Netherlands, 13–16 May 2013; pp. 385–392. [Google Scholar]
- Jansen, D.; Buttner, H. Real-time Ethernet: The EtherCAT solution. Comput. Control Eng. 2004, 15, 16–21. [Google Scholar] [CrossRef]
- Feld, J. PROFINET-scalable factory communication for all applications. In Proceedings of the 2004 IEEE International Workshop on Factory Communication Systems (WFCS 2004), Vienna, Austria, 22–24 September 2004. [Google Scholar]
- Farsi, M.; Ratcliff, K.; Barbosa, M. An overview of controller area network. Comput. Control Eng. 1999, 10, 113–120. [Google Scholar] [CrossRef]
- Pfeiffer, O.; Ayre, A.; Keydel, C. The CANopen standard. In Embedded Networking with CAN and CANopen; Copperhill Technologies Corporation: Greenfield, MA, USA, 2008; pp. 39–112. [Google Scholar]
- VMware. Available online: http://www.vmware.com (accessed on 2 September 2019).
- VirtualBox. Available online: http://www.virtualbox.org (accessed on 2 September 2019).
- Morabito, R.; Kjällman, J.; Komu, M. Hypervisors vs. lightweight virtualization: A performance comparison. In Proceedings of the 2015 IEEE International Conference on Cloud Engineering (ICCE 2015), Tempe, AZ, USA, 9–13 March 2015. [Google Scholar]
- Morabito, R. Virtualization on internet of things edge devices with container technologies: A performance evaluation. IEEE Access 2017, 5, 8835–8850. [Google Scholar] [CrossRef]
- Herber, C.; Richter, A.; Rauchfuss, H.; Herkersdorf, A. Spatial and temporal isolation of virtual CAN controllers. ACM SIGBED Rev. 2014, 11, 19–26. [Google Scholar] [CrossRef]
- Kim, J.-S.; Lee, S.-H.; Jin, H.-W. Fieldbus virtualization for integrated modular avionics. In Proceedings of the 16th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA 2011), Toulouse, France, 5–9 September 2011. [Google Scholar]
- Lee, S.-H.; Jin, H.-W.; Kim, K.; Lee, S. Phasing of periodic tasks distributed over real-time fieldbus. Int. J. Comput. Commun. Control 2017, 12, 645–660. [Google Scholar] [CrossRef][Green Version]
- Kang, H.; Kim, K.; Jin, H.-W. Real-time software pipelining for multidomain motion controllers. IEEE Trans. Ind. Inform. 2016, 12, 705–715. [Google Scholar] [CrossRef]
- Kim, I.; Kim, T. Guaranteeing isochronous control of networked motion control systems using phase offset adjustment. Sensors 2015, 15, 13945–13965. [Google Scholar] [CrossRef]
- Sung, M.; Kim, I.; Kim, T. Toward a holistic delay analysis of EtherCAT synchronized control processes. Int. J. Comput. Commun. Control 2013, 8, 608–621. [Google Scholar] [CrossRef]
- Carrascosa, E.; Coronel, J.; Masmano, M.; Balbastre, P.; Crespo, A. XtratuM hypervisor redesign for LEON4 multicore processor. ACM SIGBED Rev. 2014, 11, 27–31. [Google Scholar] [CrossRef]
- Seyfried, S. Resource management in Linux with control groups. In Proceedings of the 17th International Linux System Technology Conference (Linux-Kongress 2010), Nuremberg, Germany, 17–18 April 2013. [Google Scholar]
- Aeronautical Radio Inc. Avionics Application Software Standard Interface Part 1—Required Services; SAE-ITC: Bowie, MD, USA, 2015. [Google Scholar]
- AUTOSAR. Available online: http://www.autosar.org (accessed on 2 September 2019).
- Han, S.; Jin, H.-W. Resource partitioning for integrated modular avionics: Comparative study of implementation alternatives. Softw. Pract. Exp. 2014, 44, 1441–1466. [Google Scholar] [CrossRef]
- Katz, R.; Min, B.-K.; Pasek, Z. Open architecture control technology trends. ERC/RMS Rep. 2000, 35, 1–26. [Google Scholar]
- Hong, K.-S.; Choi, K.-H.; Kim, J.-G.; Lee, S. A PC-based open robot control system: PC-ORC. Robot. Comput. Integr. Manuf. 2001, 17, 355–365. [Google Scholar] [CrossRef]
- Nunes, B.A.A.; Mendonca, M.; Nguyen, X.N.; Obraczka, K.; Turletti, T. A survey of software-defined networking: Past, present, and future of programmable networks. IEEE Commun. Surv. Tutor. 2014, 16, 1617–1634. [Google Scholar] [CrossRef]
- Cruz, T.; Simões, P.; Monteiro, E. Virtualizing programmable logic controllers: Toward a convergent approach. IEEE Embed. Syst. Lett. 2016, 8, 69–72. [Google Scholar] [CrossRef]
- Kaur, K.; Garg, S.; Kaddoum, G.; Ahmed, S.H.; Atiquzzaman, M. KEIDS: Kubernetes based energy and interference driven scheduler for industrial IoT in edge-cloud ecosystem. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Hong, C.H.; Lee, K.; Kang, M.; Yoo, C. qCon: QoS-aware network resource management for fog computing. Sensors 2018, 18, 3444. [Google Scholar] [CrossRef]
- Barzegaran, M.; Cervin, A.; Pop, P. Towards quality-of-control-aware scheduling of industrial applications on fog computing platforms. In Proceedings of the Workshop on Fog Computing and the IoT (Iot-Fog ’19), Montreal, QC, Canada, 15 April 2019. [Google Scholar]
- Yin, L.; Luo, J.; Luo, H. Tasks scheduling and resource allocation in fog computing based on containers for smart manufacturing. IEEE Trans. Ind. Inform. 2018, 14, 4712–4721. [Google Scholar] [CrossRef]
- Martins, E.; Neves, P.; Fonseca, J. Architecture of a fieldbus message scheduler coprocessor based on the planning paradigm. Microprocess. Microsyst. 2002, 26, 97–106. [Google Scholar] [CrossRef]
- Zheng, W.; Chong, J.; Pinello, C.; Kanajan, S.; Sangiovanni-Vincentelli, A. Extensible and scalable time triggered scheduling. In Proceedings of the International Conference on Application of Concurrency to System Design (ACSD), St. Malo, France, 6–9 June 2005. [Google Scholar]
- Velasco, M.; Marti, P.; Yepez, J.; Villa, R.; Fuertes, J.M. Schedulability analysis for CAN-based networked control systems with dynamic bandwidth management. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Palma de Mallorca, Spain, 22–25 September 2009. [Google Scholar]
- Lukasiewycz, M.; Gla, M.; Milbredt, P.; Teich, J. FlexRay schedule optimization of the static segment. In Proceedings of the International Conference on Hardware/Software Codesign and System Synthesis (CODES+ISSS), Grenoble, France, 11–16 October 2009. [Google Scholar]
- Schneider, R.; Bordoloi, U.; Goswami, D.; Chakraborty, S. Optimized schedule synthesis under real-time constraints for the dynamic segment of FlexRay. In Proceedings of the IEEE/IFIP International Conference on Embedded and Ubiquitous Computing (EUC 10), Hong Kong, China, 11–13 December 2010. [Google Scholar]
- Zhang, H.; Shi, Y.; Wang, J.; Chen, H. A new delay-compensation scheme for networked control systems in controller area networks. IEEE Trans. Ind. Electron. 2018, 65, 7239–7247. [Google Scholar] [CrossRef]
- Elmenreich, W. Time-triggered fieldbus networks—State of the art and future applications. In Proceedings of the IEEE Symposium on Object Oriented Real-Time Distributed Computing (ISORC 08), Orlando, FL, USA, 5–7 May 2008. [Google Scholar]
- Cena, G.; Bertolotti, I.C.; Scanzio, S.; Valenzano, A.; Zunino, C. On the accuracy of the distributed clock mechanism in EtherCAT. In Proceedings of the IEEE International Workshop on Factory Communication Systems (WFCS), Nancy, France, 18–21 May 2010. [Google Scholar]
- Felser, M. Fieldbus based isochronous automation application. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Palma de Mallorca, Spain, 22–25 September 2008. [Google Scholar]
- Marti, P.; Camacho, A.; Velasco, M.; Mares, P.; Fuertes, J.M. Synchronizing sampling and actuation in the absence of global time in networked control systems. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Bilbao, Spain, 13–16 September 2010. [Google Scholar]
- Craciunas, S.S.; Oliver, R.S.; Ecker, V. Optimal static scheduling of real-time tasks on distributed time-triggered networked systems. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Barcelona, Spain, 16–19 September 2014. [Google Scholar]
- Shin, I.; Lee, I. Compositional real-time scheduling framework with periodic model. ACM Trans. Embed. Comput. Syst. 2008, 7, 30. [Google Scholar] [CrossRef]
- Yim, Y.-G.; Jo, H.-C.; Jin, H.-W.; Lee, S.-I. “Schedulability analysis of Linux task groups for hard real-time systems. In Proceedings of the 17th Real Time Linux Workshop (RTLWS 2015), Graz, Austria, 21–22 October 2015. [Google Scholar]
- Liu, C.; Layland, J. Scheduling algorithms for multiprogramming in a hard-real-time environment. J. ACM 1973, 20, 46–61. [Google Scholar] [CrossRef]
- Boyer, S.A. SCADA: Supervisory Control and Data Acquisition; International Society of Automation: Research Triangle, NC, USA, 2009. [Google Scholar]
- Fuhrer, T.; Muller, B.; Dieterle, W.; Hartwich, F.; Huge, R.; Walther, M. Time triggered communication on CAN (time triggered CAN-TTCAN). In Proceedings of the International CAN Conference, Helsinki, Finland, 11–14 June 2000. [Google Scholar]
- Eidson, J.C. A detailed analysis of IEEE 1588. In Measurement, Control, and Communication Using IEEE 1588; Springer: Palo Alto, CA, USA, 2006; pp. 61–132. [Google Scholar]
- Kim, K.; Sung, M.; Jin, H.-W. Design and implementation of a delay-guaranteed motor drive for precision motion control. IEEE Trans. Ind. Inform. 2012, 8, 351–365. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Sets | Sets of VCs | Virtual Controllers | Period () | Duration () | Tasks | Period (p) | Execution Time (e) |
|---|---|---|---|---|---|---|---|
| 0 | 2760 | 1000 | 5530 8800 9650 | 330 580 390 | |||
| 2970 | 1050 | 5950 7140 9980 | 310 490 550 | ||||
| 100,000 | 95,000 | 5530 8800 9650 | 330 580 390 | ||||
| 100,000 | 95,000 | 5950 7140 9980 | 310 490 550 | ||||
| 1 | 4000 | 1500 | 2000 2000 4000 | 60 100 110 | |||
| 4000 | 1500 | 2000 2000 4000 | 50 140 120 | ||||
| 100,000 | 95,000 | 2000 2000 4000 | 50 100 100 | ||||
| 100,000 | 950,000 | 2000 2000 4000 | 50 100 100 | ||||
| 2 | 2610 | 1100 | 5230 8840 9610 | 660 470 510 | |||
| 2840 | 1000 | 5680 10,580 11,090 | 440 650 420 | ||||
| 100,000 | 95,000 | 5230 8840 9610 | 660 470 510 | ||||
| 100,000 | 95,000 | 5680 10,580 11,090 | 440 650 420 |
| Parameters | Value |
|---|---|
| Phasing resolution | 50 |
| Simulation iterations | 1000 |
| Simulation resolution | 10 |
| Interrupt handling overhead | 20 |
| Tx and Rx queue size | 10 |
| Fieldbus bandwidth | 1 Mbps |
| Fieldbus forwarding delay | 1 |
| Message size | 8 bytes |
| Direct Memory Access (DMA) overhead | 10 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.-H.; Kim, J.-S.; Seok, J.-S.; Jin, H.-W. Virtualization of Industrial Real-Time Networks for Containerized Controllers. Sensors 2019, 19, 4405. https://doi.org/10.3390/s19204405
Lee S-H, Kim J-S, Seok J-S, Jin H-W. Virtualization of Industrial Real-Time Networks for Containerized Controllers. Sensors. 2019; 19(20):4405. https://doi.org/10.3390/s19204405
Chicago/Turabian StyleLee, Sang-Hun, Jong-Seo Kim, Jong-Soo Seok, and Hyun-Wook Jin. 2019. "Virtualization of Industrial Real-Time Networks for Containerized Controllers" Sensors 19, no. 20: 4405. https://doi.org/10.3390/s19204405
APA StyleLee, S.-H., Kim, J.-S., Seok, J.-S., & Jin, H.-W. (2019). Virtualization of Industrial Real-Time Networks for Containerized Controllers. Sensors, 19(20), 4405. https://doi.org/10.3390/s19204405