Reconstruction of 3D Pavement Texture on Handling Dropouts and Spikes Using Multiple Data Processing Methods


Abstract
:1. Introduction
- Unevenness (500 mm < wavelength < 50 m)
- Mega-texture (50 mm < wavelength < 500 mm, 0.1 mm < amplitude < 50 mm)
- Macro-texture (0.5 mm < wavelength < 50 mm, 0.1 mm < amplitude < 20 mm).
- Micro-texture (wavelength < 0.5 mm, 1μm < amplitude < 500 μm).
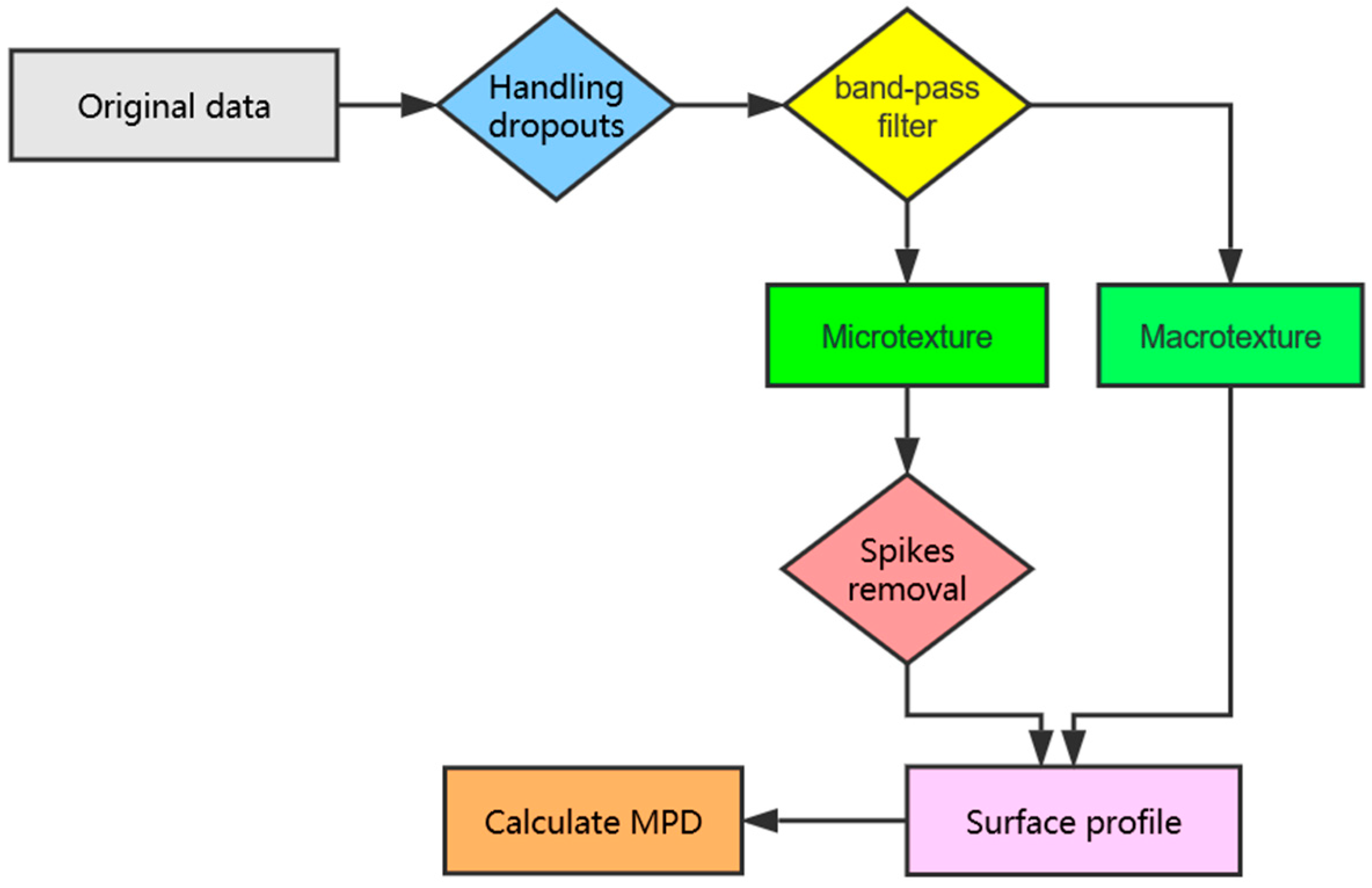
- Propose a method that can easily fill up the dropout area in the pavement profile.
- Develop a method that can identify and remove the spikes from the pavement texture measurements.
- Validate the above-mentioned methods by construction of a 3D surface profile and calculation of the mean profile depth (MPD) based on the original and corrected measurements.
2. Measurement Method
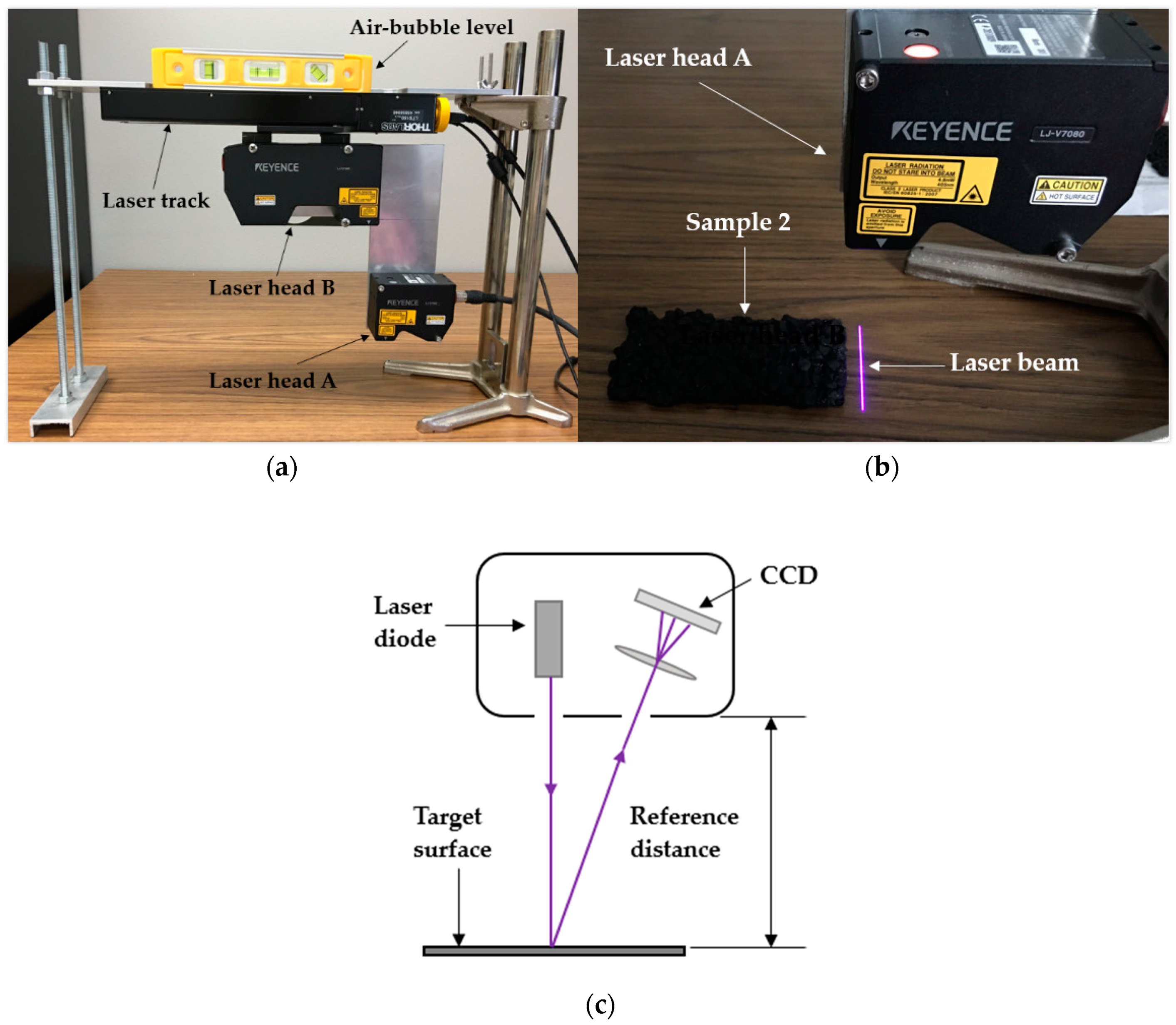
2.1. Test Device
2.2. Test Settings
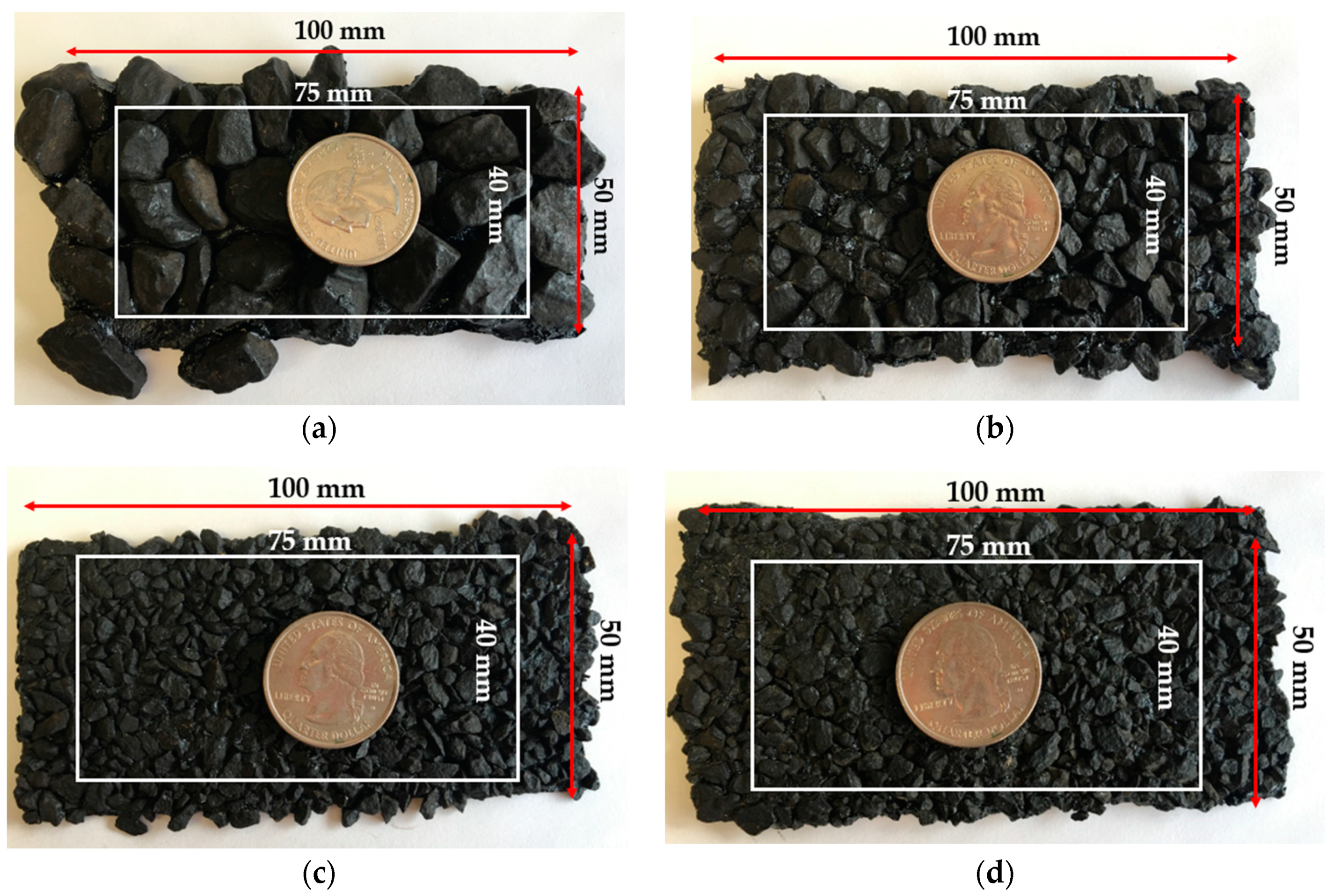
2.3. Sample for Measurement
3. Handling Dropout
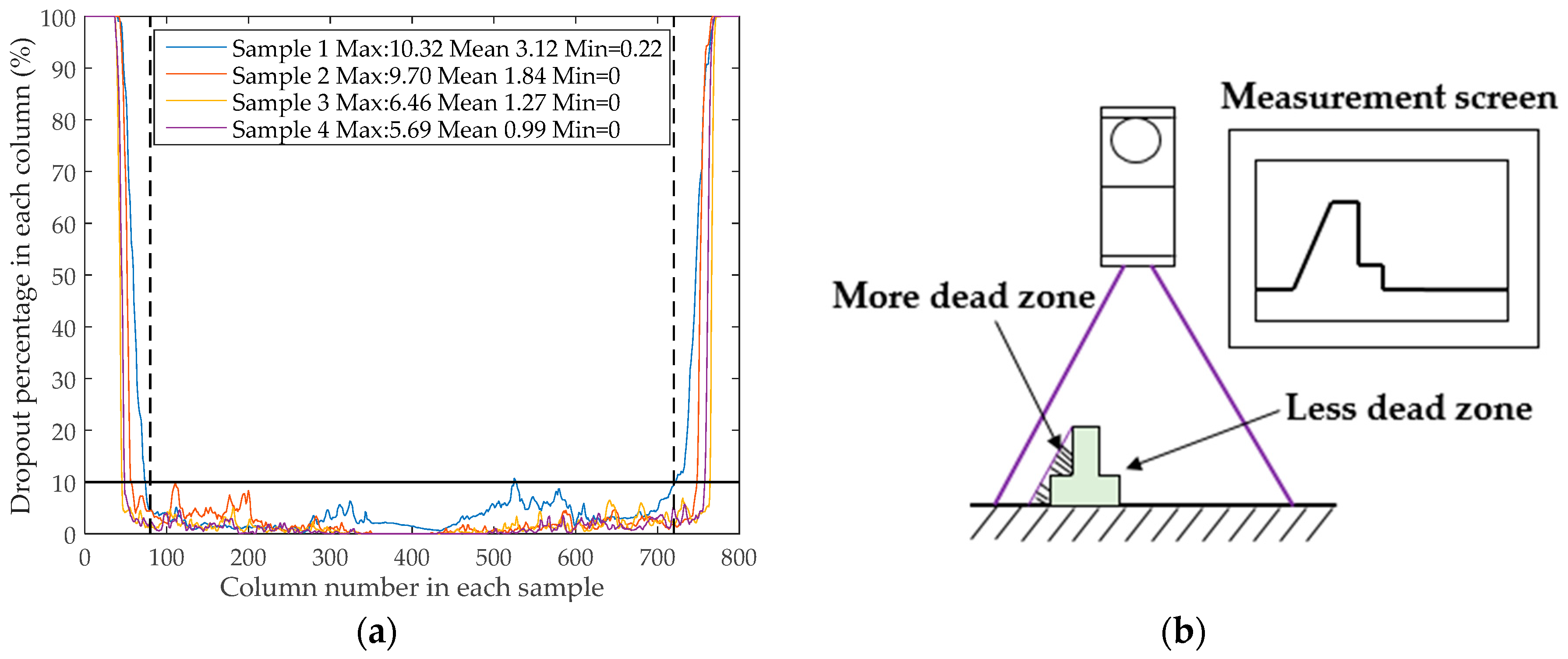
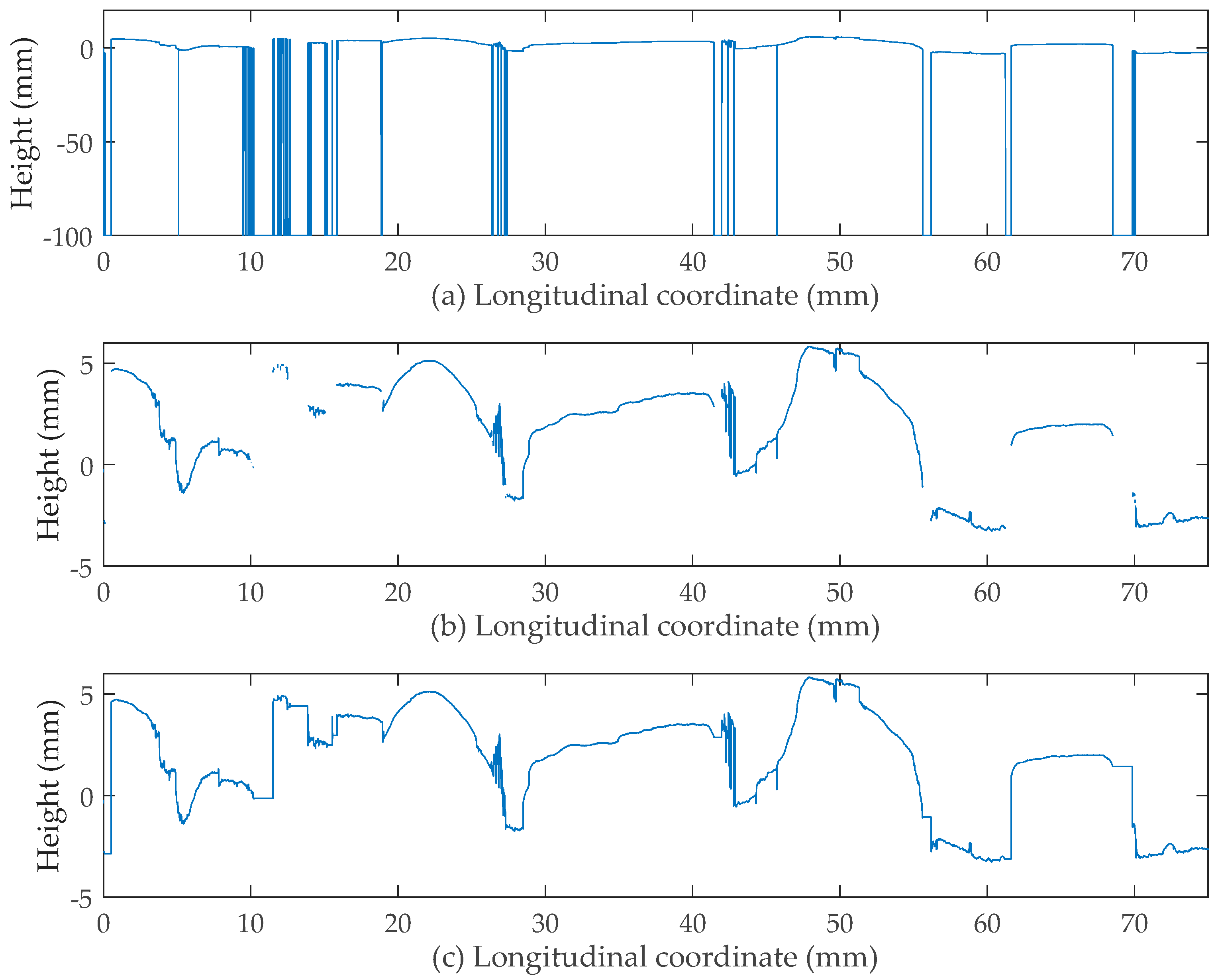
3.1. Dropout Distribution
3.2. Rectification Method
- = longitudinal position of point i or j, and
- = measurement of point , and
- = measurement of point .
3.3. Comparison before and after Correction
4. Spike Removal
4.1. Theoretical Background for Pavement Profile Analysis
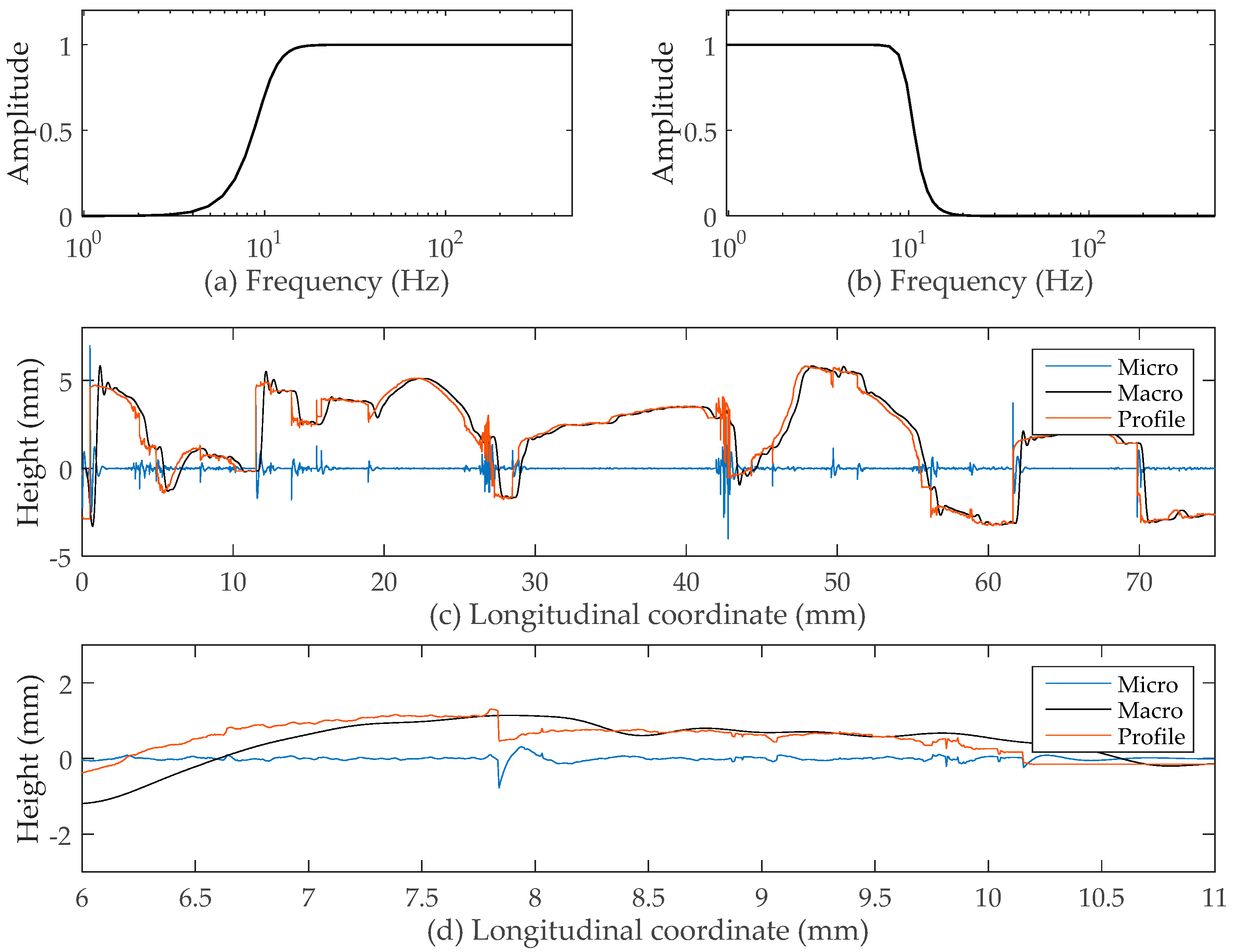
4.2. Application of Butterworth’s Filter
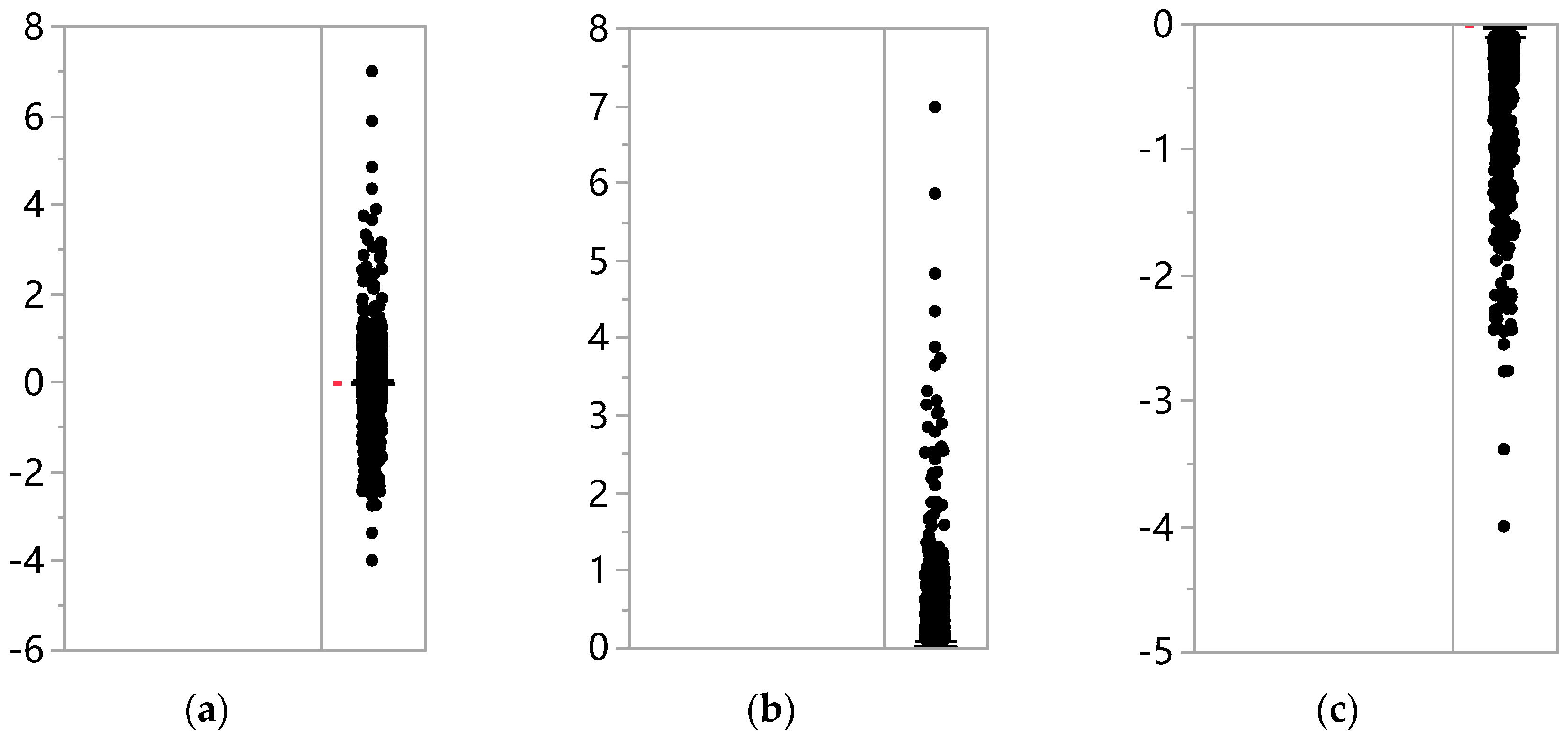
4.3. Statistical Analysis for Micro-texture
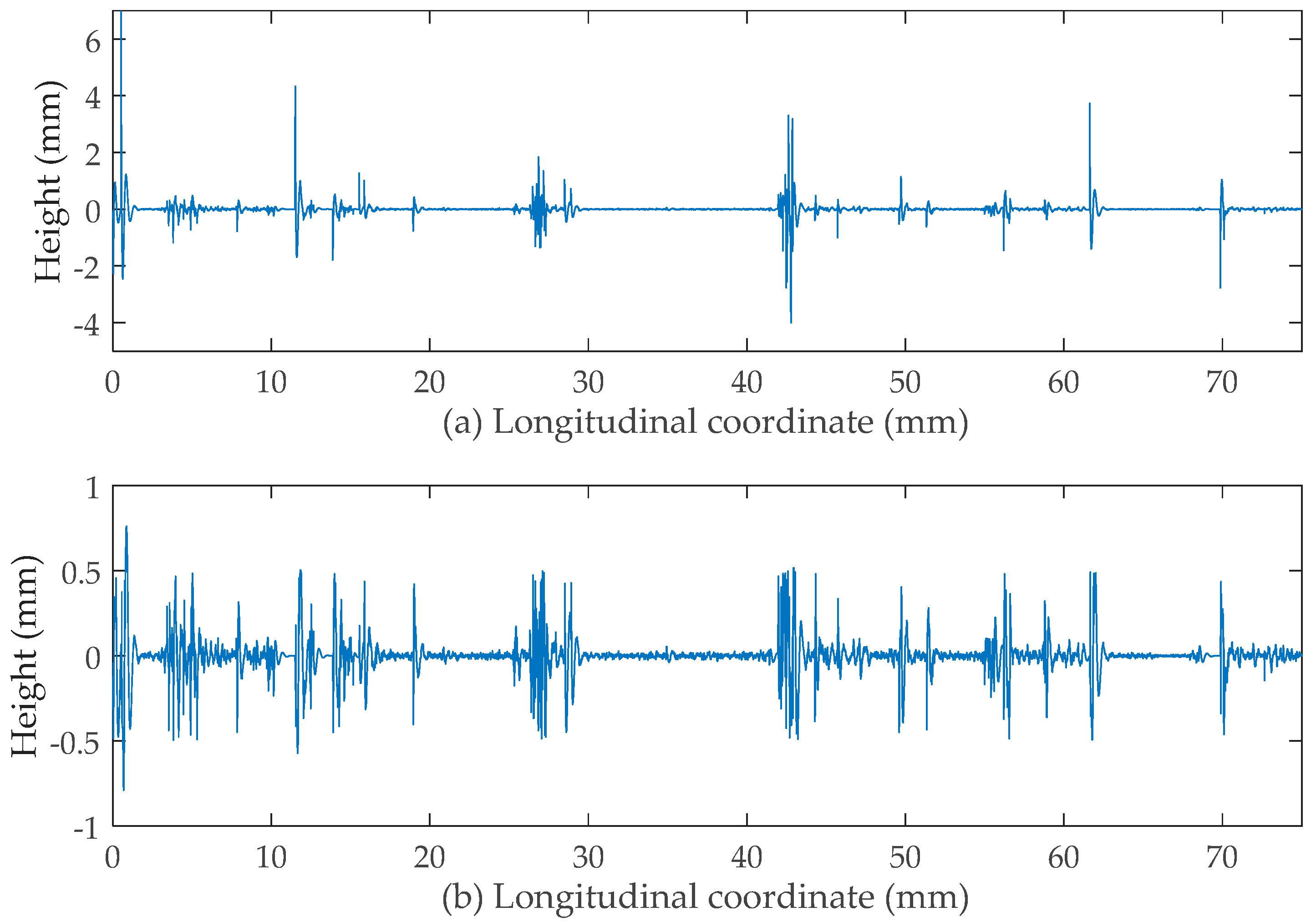
4.4. Application of Moving Average Filter
- is the output value at the i-th point for this filter, and
- is the sampling interval or distance between points, and
- is the input value, and
- is the computational base of the filter which identifies the extension of the interval which is averaged.
4.5. Reconstruction of a 3D Pavement Surface Profile
5. Calculation of MPD Value
- = number of points within the baseline, and
- = amplitude of point .
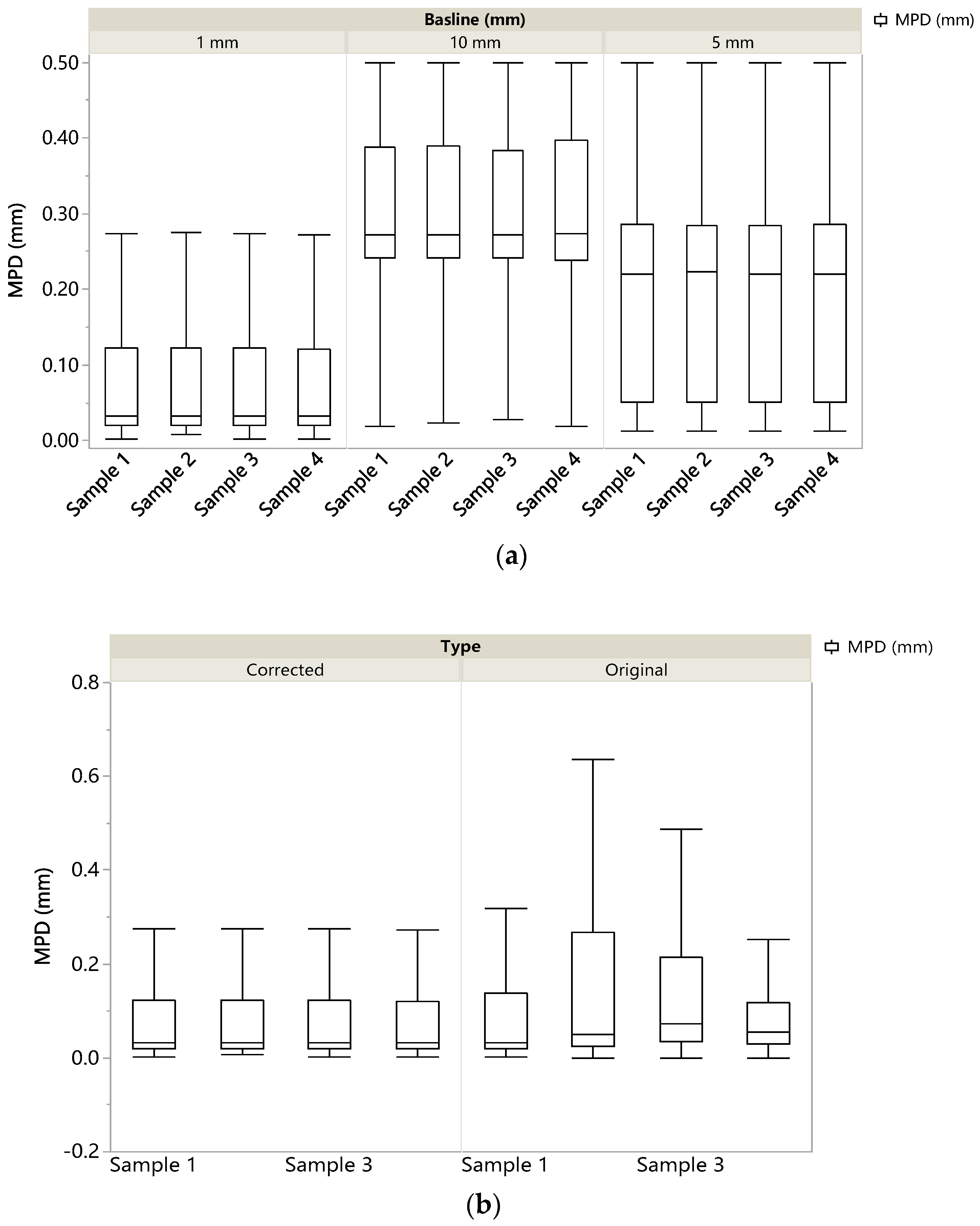
- Both the mean and the median values of the MPD undergo a significant growth as the baseline increases.
- In general, the mean MPD is much more sensitive to spikes than the median MPD.
- With the decrease of the baseline length, the difference of mean MPD between the corrected and original profiles becomes more and more insignificant, indicating that the errors caused by spikes in the MPD values were much reduced by choosing a shorter baseline.
- For each sample with a given baseline length, the mean MPD value is greater than its median.
- Compared with original results, both the mean and median MPD for the corrected profiles decreases to some extent.
6. Conclusions
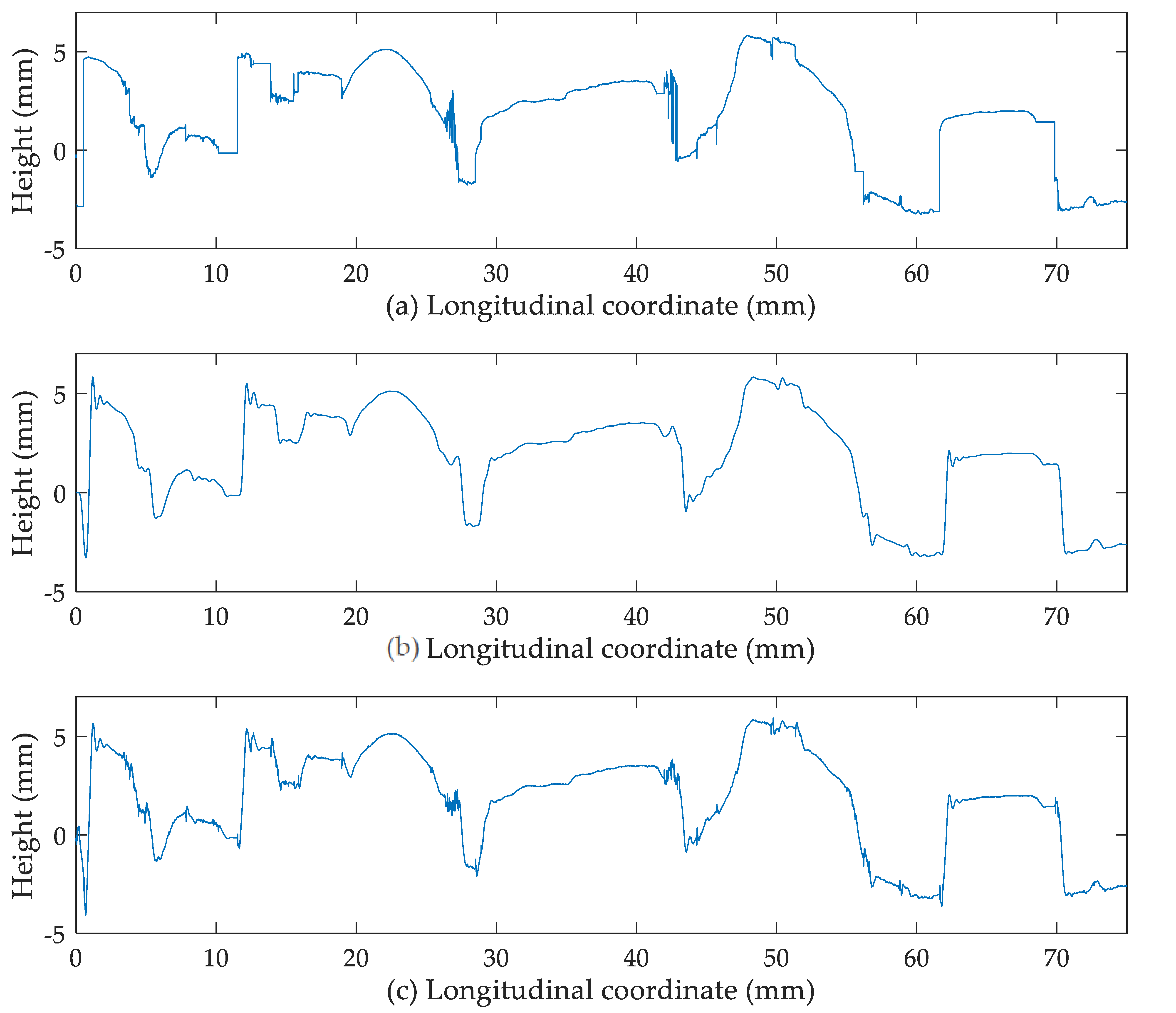
- The occurrence of dropouts was mainly due to two reasons. On one hand, when the location of the object is out of the effective scan coverage, a large number of dropouts will appear in the data and should be dismissed. On the other hand, due to the roughness of the pavement texture, some areas may be sheltered from the laser light, which leads to small number of dropouts. It was found that the dropouts were present more frequently as the gradation of the sample became coarser. Using a linear interpolation method proposed in this study, the dropout areas in the pavement profile were filled up. Though the correction effect is not perfect, this method still confers simplicity and efficiency for operation.
- Using Butterworth’s high-pass and low-pass filters with a cut-off frequency of 10 Hz and filter order of 4, the micro-texture and macro-texture components were separated from the measurements, respectively. However, because the spikes and micro-texture were overlapping in the frequency domain (wavelength), the spikes still remained in the micro-texture.
- A three-step spike removal method using moving average filter was developed to remove the spikes. The spikes were identified according to the amplitude range. In order to obtain an optimum smoothing effect, the moving average filter was applied three times with different computational bases (B) from long to short. The recommended B values were 15 mm, 5 mm and 1 mm, respectively. This method was only applied to spikes without changing the frequency and amplitude of non-spike points and therefore ensured the accuracy of the micro-texture measurements.
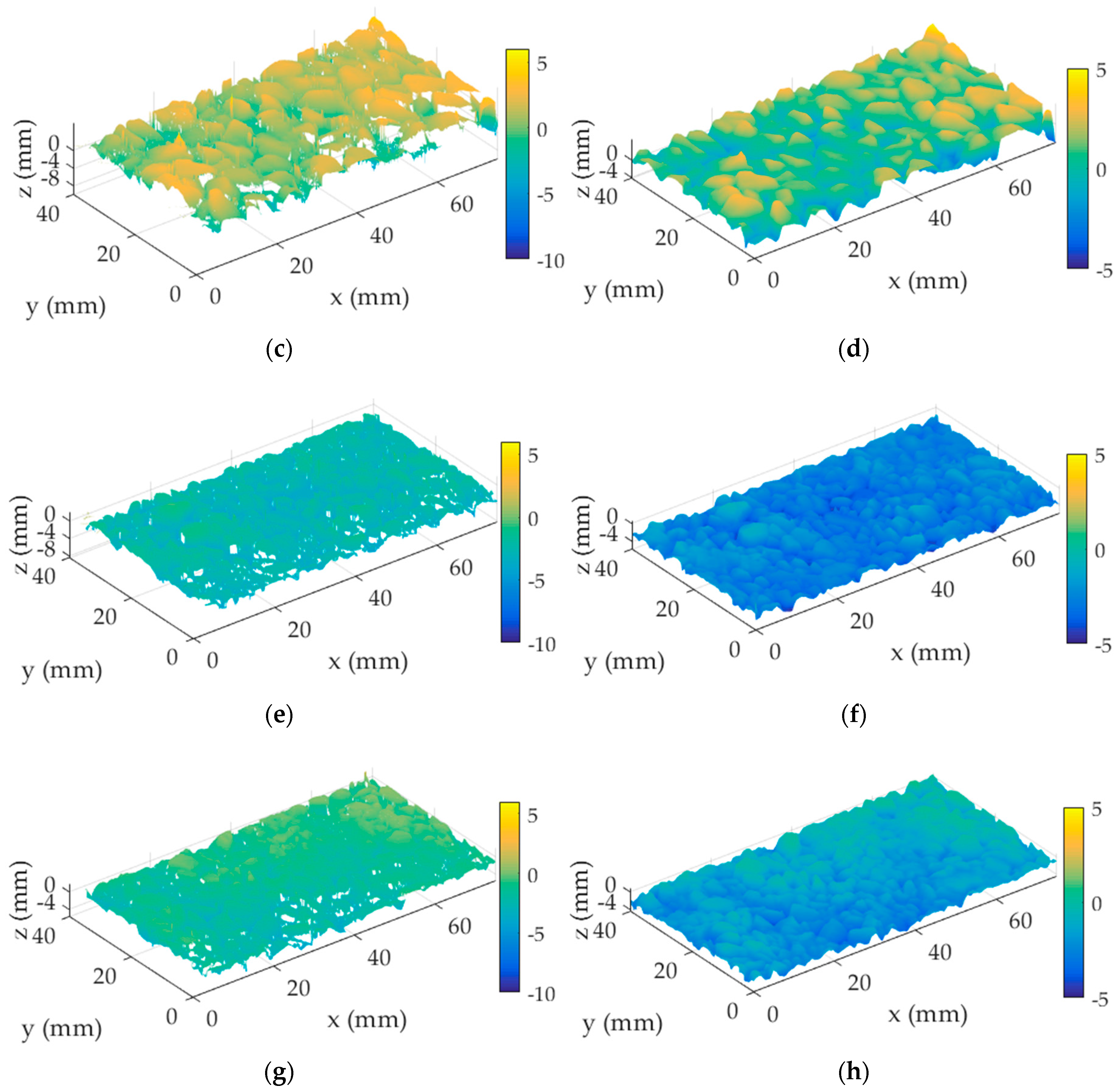
- The 3D pavement surface texture model was constructed to visually verify the effects of the proposed methods. It was found that the dropouts and spikes appearing in the original models no longer existed in the corrected ones, proving the effectiveness of the corrected methods proposed in this study.
- The presence of spikes certainly caused the MPD of the micro-texture to increase to some extent. The impact of spikes on the MPD was sensitive to the baseline length. With the baseline decreasing from 10 mm to 1 mm, the MPD value saw an apparent decrease and the errors caused by spikes in MPD values were much reduced. Thus, 1 mm was recommended as a better option for characterization of the micro and macro texture with a short wavelength so as to mitigate the impact of spikes on the accuracy of the MPD.
Author Contributions
Acknowledgments
Conflicts of Interest
References
- PIARC World Road Association. Report of the Committee on Surface Characteristics. In Proceedings of the XVIII World Road Congress, Brussels, Belgium, 13–19 September 1987. [Google Scholar]
- Sandberg, U.; Descornet, G. Road Surface Influence on Tire/Road Noise-Parts I and II. In Proceedings of the Inter-Noise 80, Miami, FL, USA, 8–10 December 1980; pp. 259–272. [Google Scholar]
- Bitelli, G.; Simone, A.; Girardi, F.; Lantieri, C. Laser scanning on road pavements: A new approach for characterizing surface texture. Sensors 2012, 12, 9110–9128. [Google Scholar] [CrossRef] [PubMed]
- ASTM E867. Standard Terminology Relating to Vehicle-Pavement Systems; Philadelphia American Society for Testing and Materials (ASTM): West Conshohocken, PA, USA, 2012. [Google Scholar]
- Sandberg, U. Influence of Road Surface Texture on Traffic Characteristics Related to Environment, Economy, and Safety: A State-of-Art-Study Regarding Measures and Measuring Methods; VTI notat53A-1997; Swedish National Road Association: Linkoping, Sweden, 1998. [Google Scholar]
- Dunford, A. Friction and the Texture of Aggregate Particles Used in the Road Surface Course. Ph.D. Thesis, University of Nottingham, Nottingham, UK, 2013. [Google Scholar]
- Hall, J.W.; Smith, K.L.; Titus-Glover, L.; Evans, L.D.; Wambold, J.C.; Yager, T.J. Guide for Pavement Friction Contractor’s Final Report for National Cooperative Highway Research Program (NCHRP) Project 01-43; Transportation Research Board of the National Academies: Washington, DC, USA, 2009. [Google Scholar]
- Kassem, E.; Awed, A.; Masad, E.; Little, D.N. Development of predictive model for skid loss of asphalt pavements. Transp. Res. Rec. 2013, 2372, 83–96. [Google Scholar] [CrossRef]
- Descornet, G. Criterion for optimizing surface characteristics. Transp. Res. Rec. 1989, 1215, 173–177. [Google Scholar]
- Pedro, A.S.; Andre, F.S.; Jorge, A.P. Incorporating surface microtexture in the prediction of skid resistance of flexible pavements. Transp. Res. Rec. 2014, 2457, 105–113. [Google Scholar]
- Luhmann, T. Close range photogrammetry for industrial applications. J. Photogramm. Remote Sens. 2010, 65, 558–569. [Google Scholar] [CrossRef]
- Blais, F. A review of 20 years of range sensors development. J. Electron. Imaging 2004, 13, 231–240. [Google Scholar] [CrossRef]
- Beyer, H. Geometric and Radiometric Analysis of a CCD-Camera Based Photogrammetric Close-Range System. Ph.D. Thesis, Institut für Geodäsie und Photogrammetrie, ETH Zürich, Zurich, Switzerland, 1992. [Google Scholar]
- Brown, J.; Dold, J. V STARS-A System for Digital Industrial Photogrammetry. In Optical 3D Measurement Techniques III; Gruen, A., Kahmen, H., Eds.; Wichmann Verlag: Heidelberg, Germany, 1995; pp. 12–21. [Google Scholar]
- Fraser, C.S.; Woods, A.; Brizzi, D. Hyper Redundancy for Accuracy Enhancement in Automated Close Range Photogrammetry. Photogramm. Rec. 2005, 20, 205–217. [Google Scholar] [CrossRef]
- Parian, J.A.; Grün, A.; Cozzani, A. High Accuracy Space Structures Monitoring by a Close-Range Photogrammetric Network. International Archives of Photogrammetry. Remote Sens. Spat. Inf. Sci. 2006, 36 Pt 5, 236–241. [Google Scholar]
- Rieke-Zapp, D.; Tecklenburg, W.; Peipe, J.; Hastedt, H.; Haig, C. Evaluation of the geometric stability and the accuracy potential of digital cameras-comparing mechanical stabilisation versus parametrisation. J. Photogramm. Remote Sens. 2009, 64, 248–258. [Google Scholar] [CrossRef]
- Perera, R.W.; Kohn, S.D. NCHRP Web Document 42: Issues in Pavement Smoothness: A Summary Report; Transportation Research Board of the National Academies: Washington, DC, USA, 2002. [Google Scholar]
- Masad, E.; Rezaei, A.; Chowdhury, A.; Harris, P. Predicting Asphalt Mixture Skid Resistance Based on Aggregate Characteristics; FHWA/TX-09/0-5627-1; Texas Transportation Institute, Texas A&M University System: College Station, TX, USA, 2009. [Google Scholar]
- Perera, R.W.; Kohn, S.D. Issues in Pavement Smoothness, A Summary Report. National Cooperative Highway Research Program; Soil and Materials Engineers, Inc.: Plymouth, MI, USA, March 2002. [Google Scholar]
- Sayers, M.W.; Karamihas, S.M. Interpretation of Road Roughness Profile Data; FHWA/RD-96/101; Federal Highway Administration: McLean, VA, USA, 1996.
- Selcom Optocator User’s Manual; LMI Technologies, Inc.: Delta, BC, Canada, 2013.
- Goubert, L.; Bergiers, A. About the reproducibility of texture profiles and the problem of spikes. In Proceedings of the 7th Symposium on Pavement Surface Characteristics: SURF 2012, Norfolk, VA, USA, 19–22 September 2012. [Google Scholar]
- Katicha, S.W.; Mogrovejo, D.E.; Flintsch, G.W.; Izeppi, E.D.D. Adaptive spike removal method for high-speed pavement macrotexture measurements by controlling the false discovery rate. Transp. Res. Rec. 2015, 2525, 100–110. [Google Scholar] [CrossRef]
- Katicha, S.W.; Mogrovejo, D.E.; Flintsch, G.W.; Izeppi, E.D.D. Latest development in the processing of pavement macrotexture measurements of high speed laser devices. In Proceedings of the 9th International Conference on Managing Pavement Assets, Washington, DC, USA, 18–21 May 2015. [Google Scholar]
- Keyence, Measurement Sensors. Available online: http://www.keyence.com/products/measure/index.jsp (accessed on 6 October 2018).
- Butterworth, S. On the theory of filter amplifiers. Exp. Wirel. 1930, 7, 536–541. [Google Scholar]
- ASTM E1845-09. Standard Practice for Calculating Pavement Macrotexture Mean Profile Depth; American Society for Testing and Materials (ASTM): West Conshohocken, PA, USA, 2009. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numberof Points | Moving Velocity (mm/s) | Sampling Frequency (Hz) | Sampling Interval (mm) | Scan Distance (mm) |
|---|---|---|---|---|
| 15,000 | 5 | 1000 | 0.005 | 75 |
| Indicator | Micro | Micro > 0 | Micro < 0 |
|---|---|---|---|
| Max | 6.971 | 6.971 | |
| 99.5% | 1.005 | 1.292 | |
| 97.5% | 0.345 | 0.645 | |
| 90% | 0.059 | 0.145 | −0.002 |
| 75% | 0.014 | 0.043 | −0.005 |
| Median | 0.014 | −0.014 | |
| a25% | −0.013 | 0.005 | −0.045 |
| 10% | −0.060 | 0.002 | −0.171 |
| 2.5% | −0.338 | −0.581 | |
| 0.5% | −1.258 | −1.652 | |
| Min | −4.005 | −4.005 | |
| Mean | 0.074 | −0.076 | |
| Number | 15,000 | 7609 | 7391 |
| MPD Value (mm) | Baseline Length (mm) | ||||
|---|---|---|---|---|---|
| 1 | 5 | 10 | |||
| Sample 1 | Original | Mean | 0.212 | 0.564 | 0.929 |
| Median | 0.033 | 0.267 | 0.631 | ||
| Corrected | Mean | 0.099 | 0.220 | 0.293 | |
| Median | 0.033 | 0.203 | 0.272 | ||
| Sample 2 | Original | Mean | 0.236 | 0.698 | 1.123 |
| Median | 0.051 | 0.565 | 1.024 | ||
| Corrected | Mean | 0.099 | 0.223 | 0.294 | |
| Median | 0.033 | 0.204 | 0.272 | ||
| Sample 3 | Original | Mean | 0.176 | 0.511 | 0.758 |
| Median | 0.072 | 0.435 | 0.714 | ||
| Corrected | Mean | 0.099 | 0.220 | 0.293 | |
| Median | 0.033 | 0.203 | 0.272 | ||
| Sample 4 | Original | Mean | 0.115 | 0.315 | 0.475 |
| Median | 0.054 | 0.242 | 0.420 | ||
| Corrected | Mean | 0.099 | 0.220 | 0.294 | |
| Median | 0.033 | 0.203 | 0.273 | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, N.; Prozzi, J.A.; Ni, F. Reconstruction of 3D Pavement Texture on Handling Dropouts and Spikes Using Multiple Data Processing Methods. Sensors 2019, 19, 278. https://doi.org/10.3390/s19020278
Dong N, Prozzi JA, Ni F. Reconstruction of 3D Pavement Texture on Handling Dropouts and Spikes Using Multiple Data Processing Methods. Sensors. 2019; 19(2):278. https://doi.org/10.3390/s19020278
Chicago/Turabian StyleDong, Niya, Jorge A. Prozzi, and Fujian Ni. 2019. "Reconstruction of 3D Pavement Texture on Handling Dropouts and Spikes Using Multiple Data Processing Methods" Sensors 19, no. 2: 278. https://doi.org/10.3390/s19020278
APA StyleDong, N., Prozzi, J. A., & Ni, F. (2019). Reconstruction of 3D Pavement Texture on Handling Dropouts and Spikes Using Multiple Data Processing Methods. Sensors, 19(2), 278. https://doi.org/10.3390/s19020278