Handshake Sense Multiple Access Control for Cognitive Radio-Based IoT Networks

 ,
, 

 ,
,  and
and 
Abstract
:1. Introduction
- We propose a new MAC protocol for densely deployed CR-based IoT networks that resolves the hidden primary terminal problem with the minimal possible overhead while effectively dealing with the classical hidden (secondary) terminal problem.
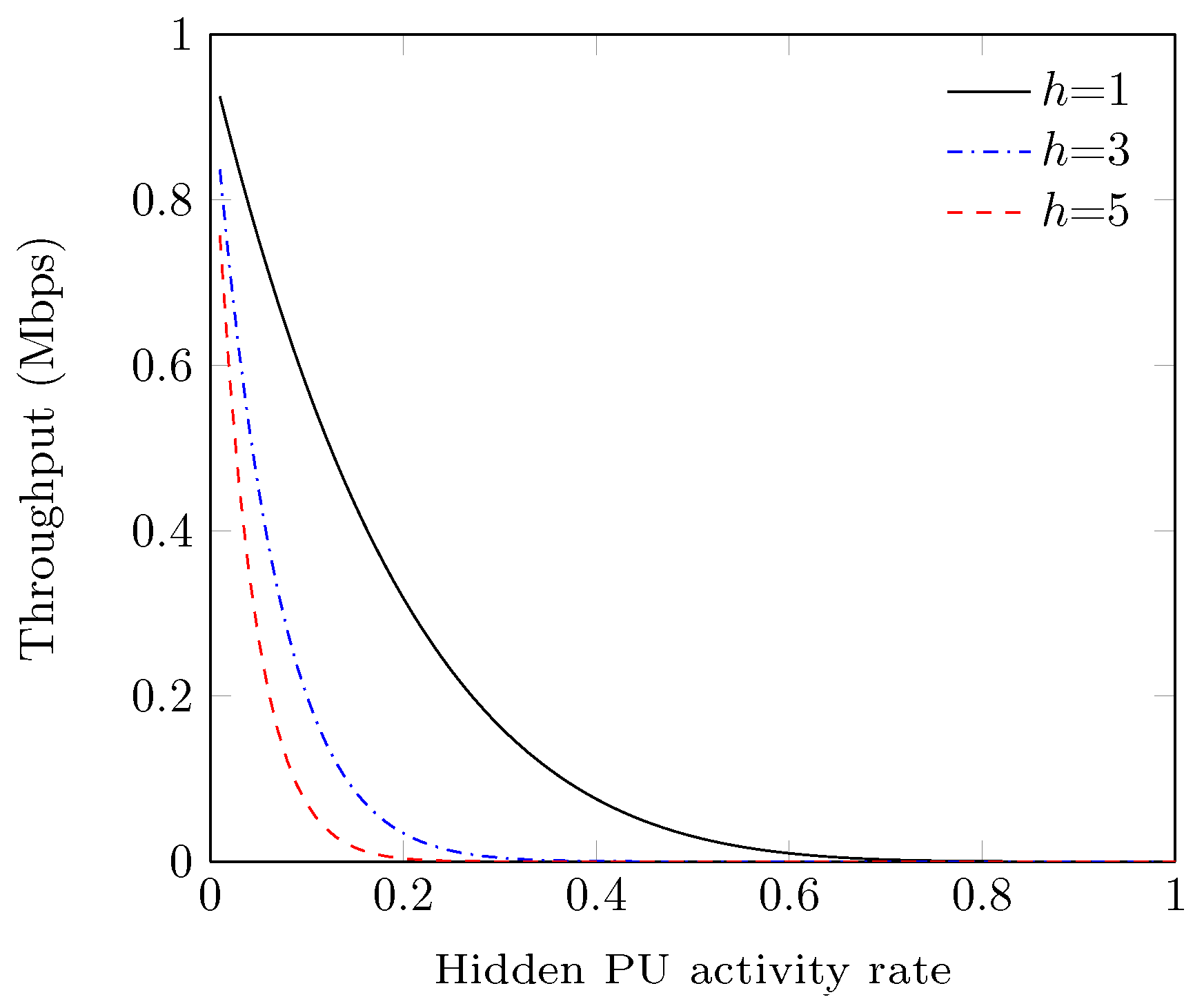
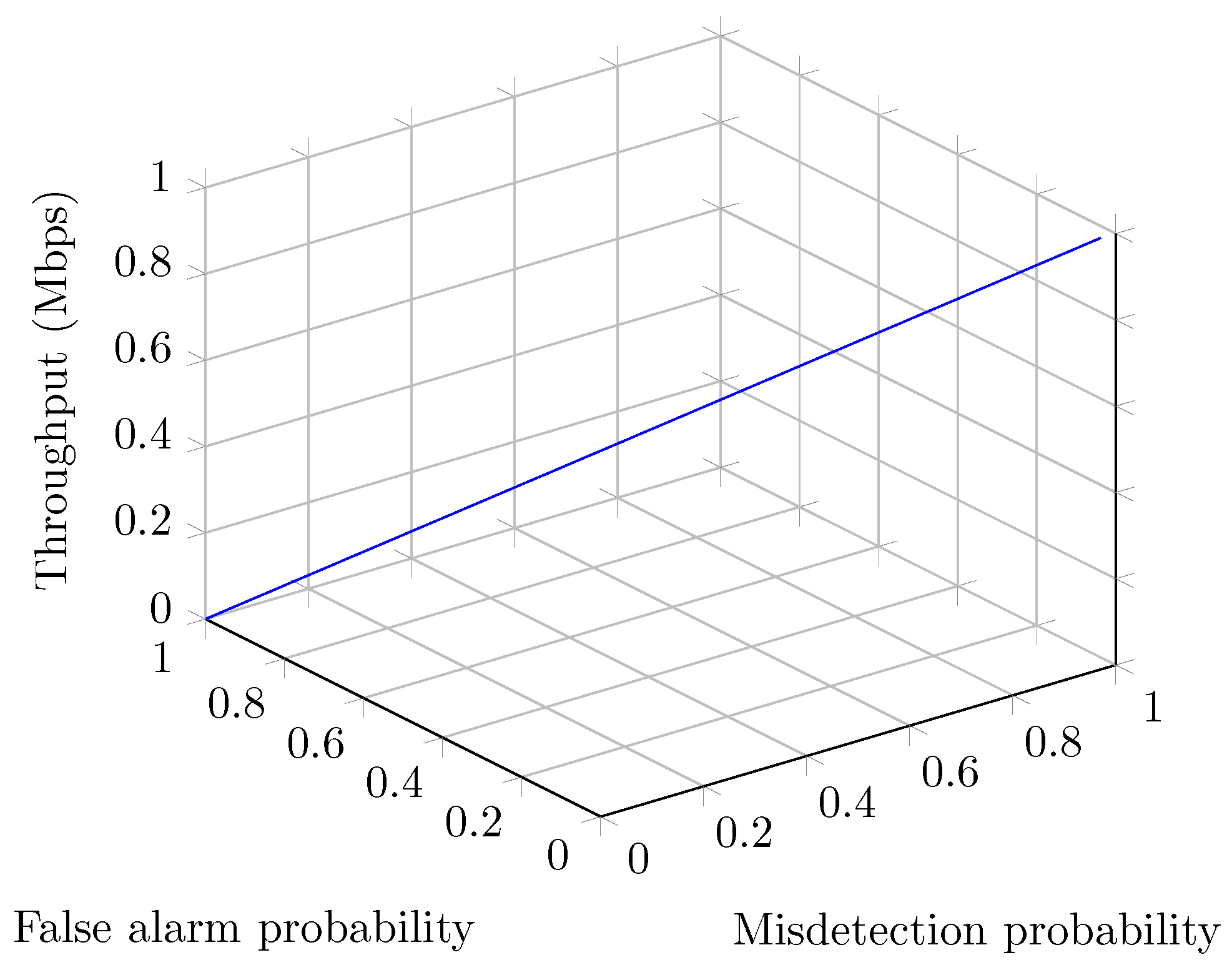
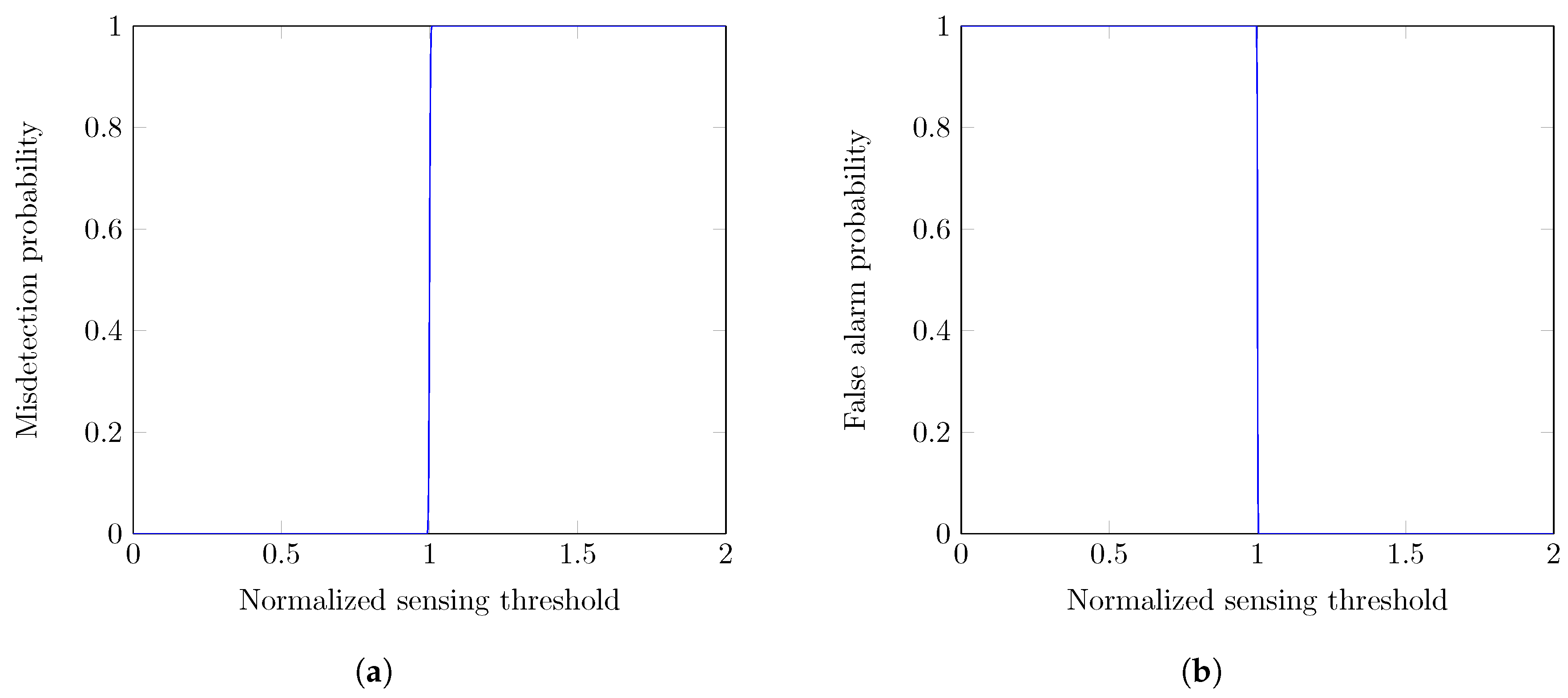
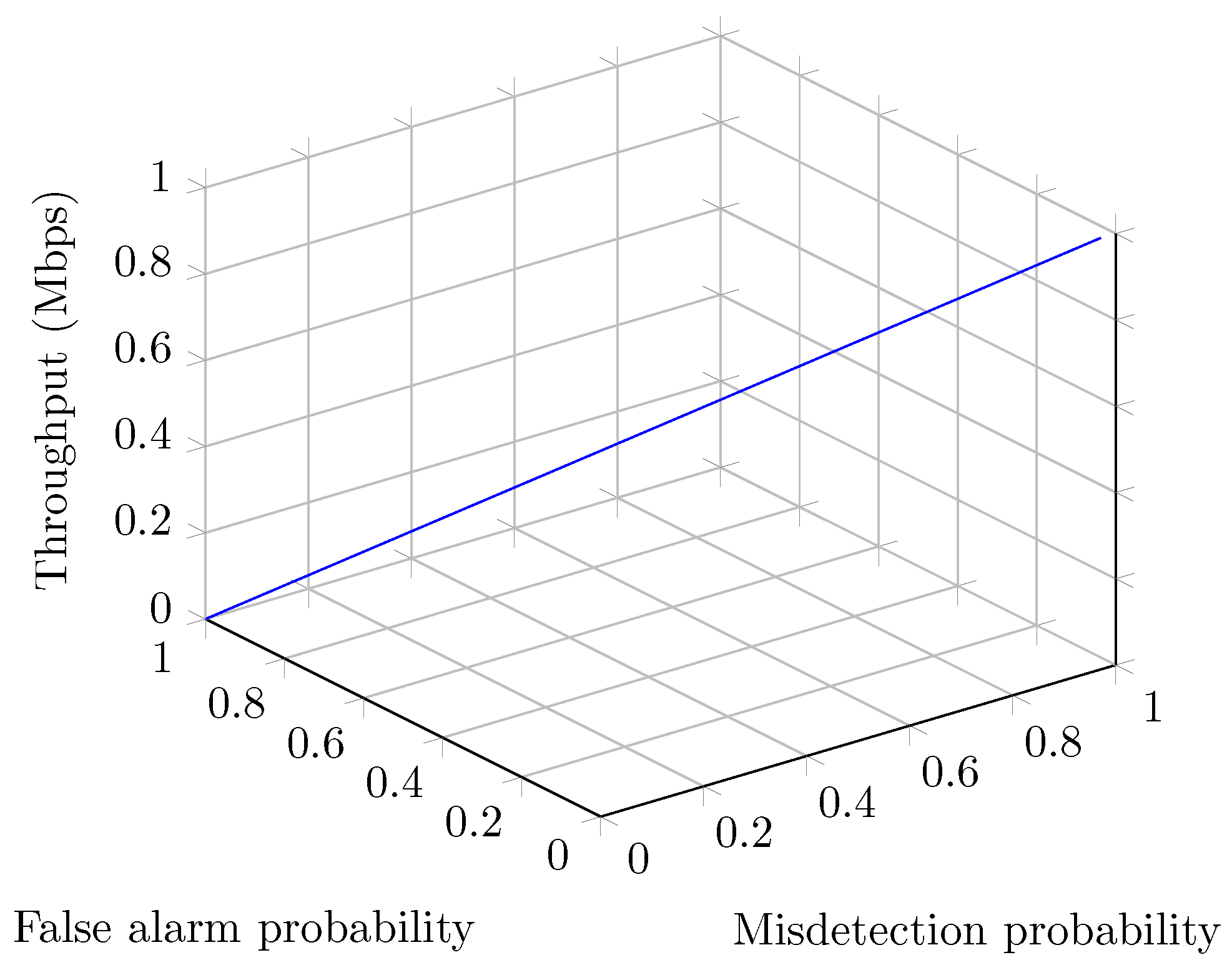
- We develop an optimization model to judicially adapt the spectrum sensing period considering the incidences of false alarm and misdetection and hidden primary terminal, in order to improve the system efficiency and reduce the interference to active PUs.
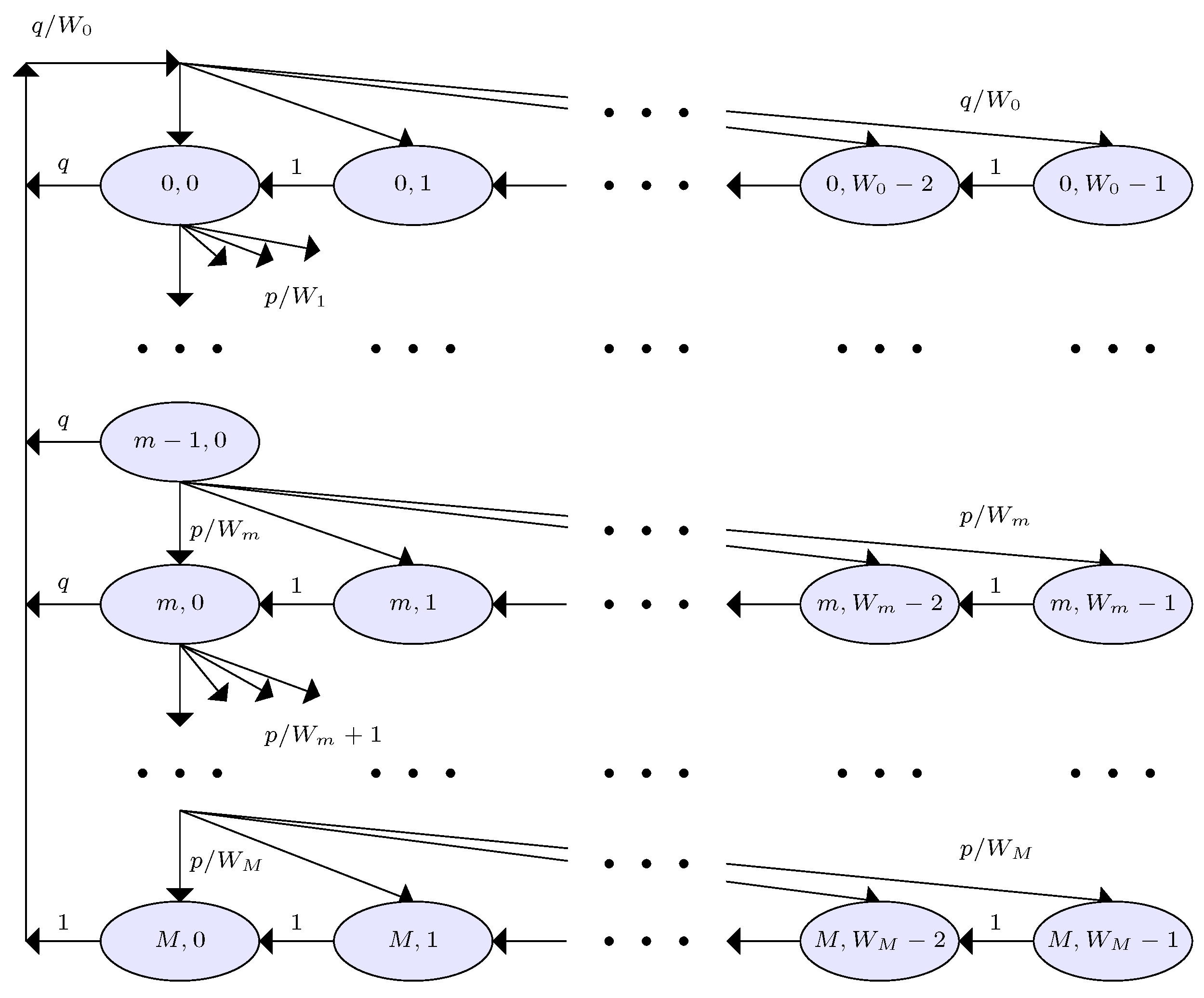
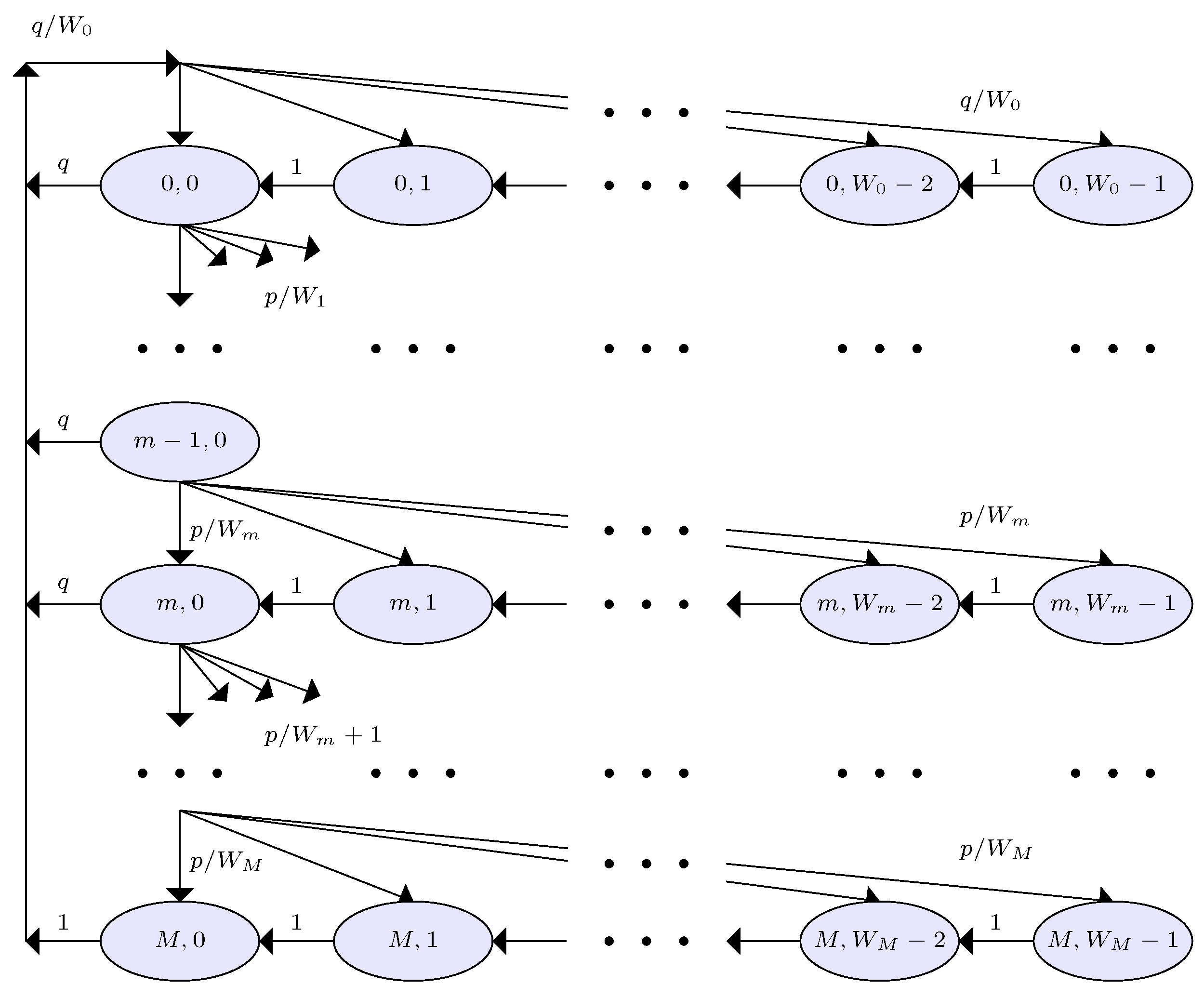
- We analyze the performance of our proposed protocol in terms of normalized throughput with the Markov chain model and compare the results with that of existing CR-MEGA and MSMA/CA protocols.
2. Issues of CR-Based IoT Networks
2.1. Heterogeneous Environment
2.2. Tradeoff between Sensing Schemes
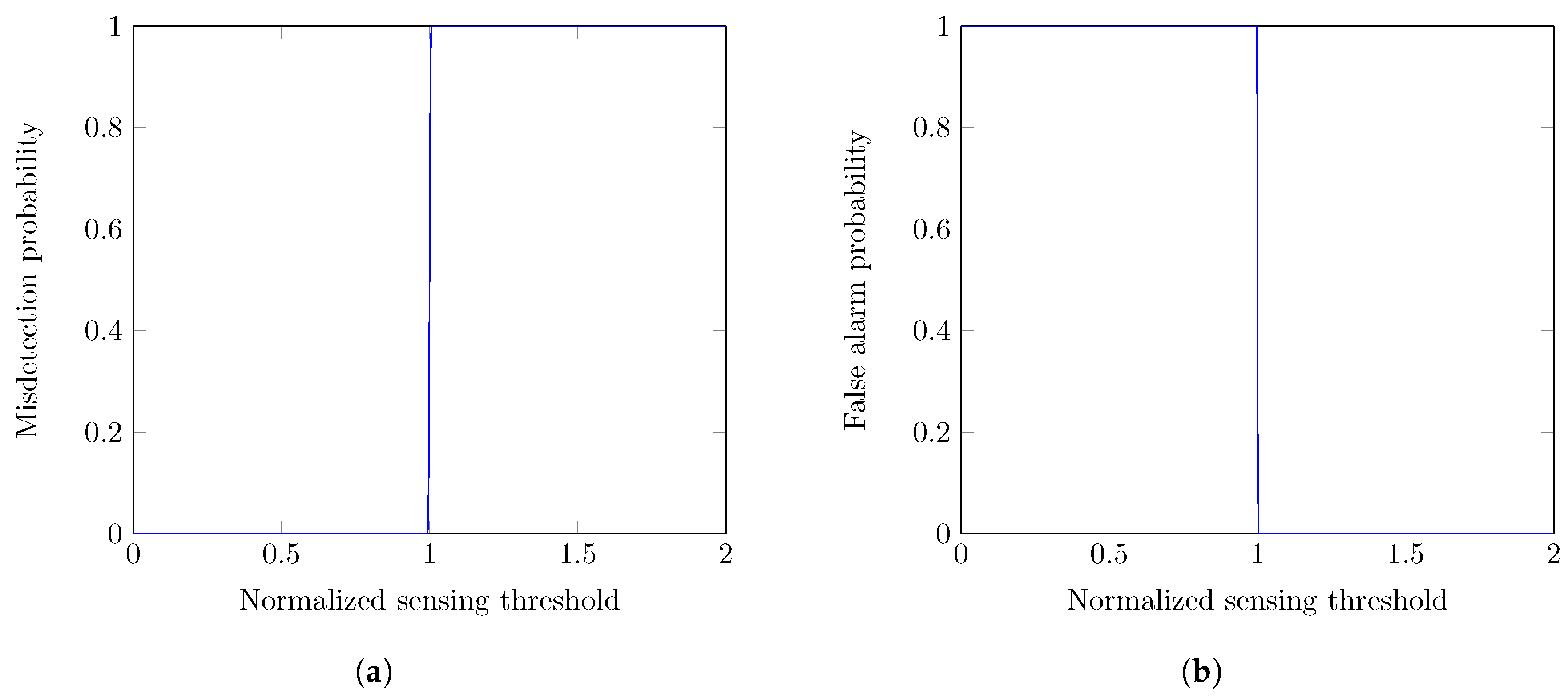
2.3. Sensing Performance
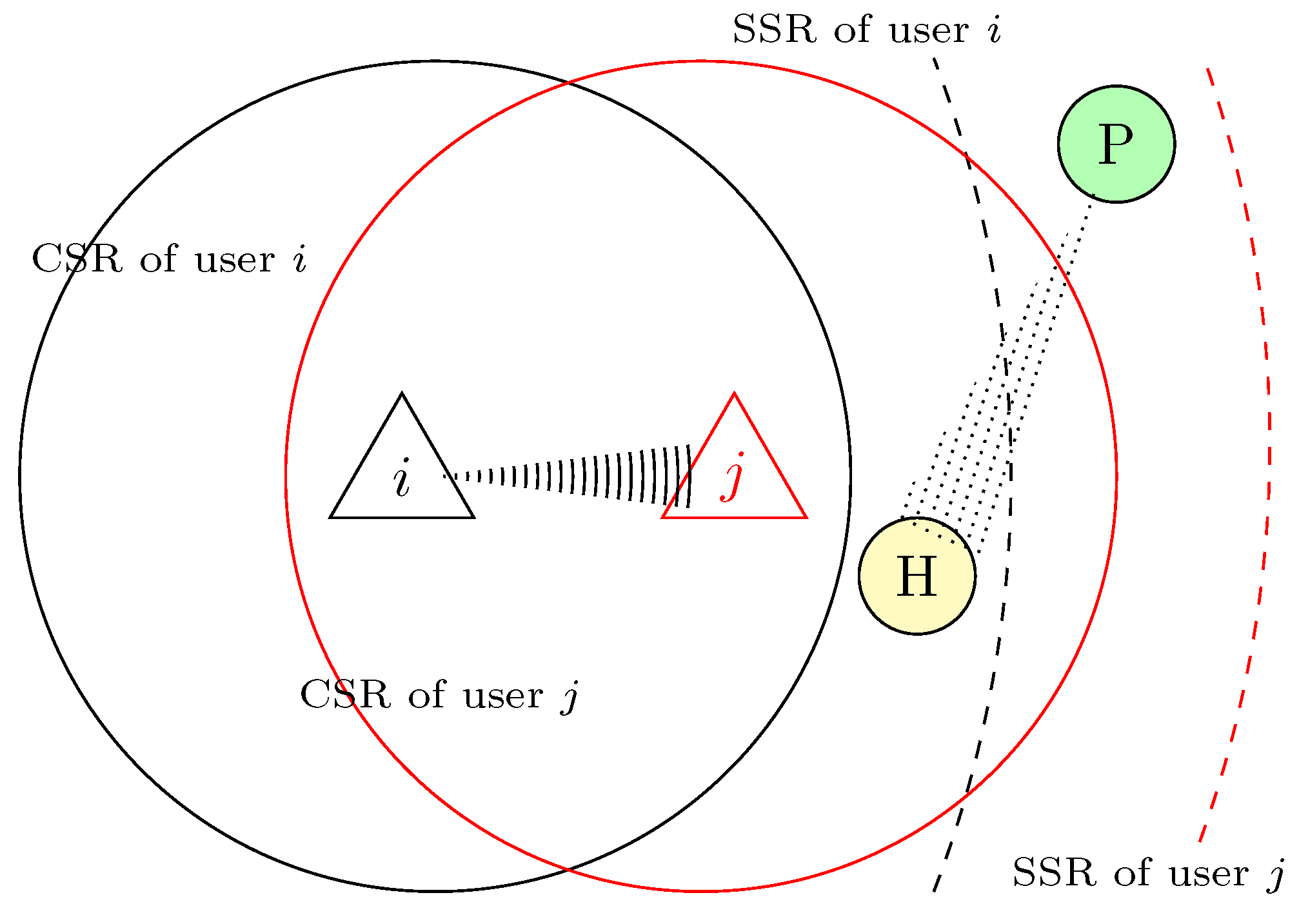
2.4. Hidden Primary Terminal Problem
3. System Model
4. Proposed MAC Protocol
4.1. NTS/CTS/ATS Access Mechanism
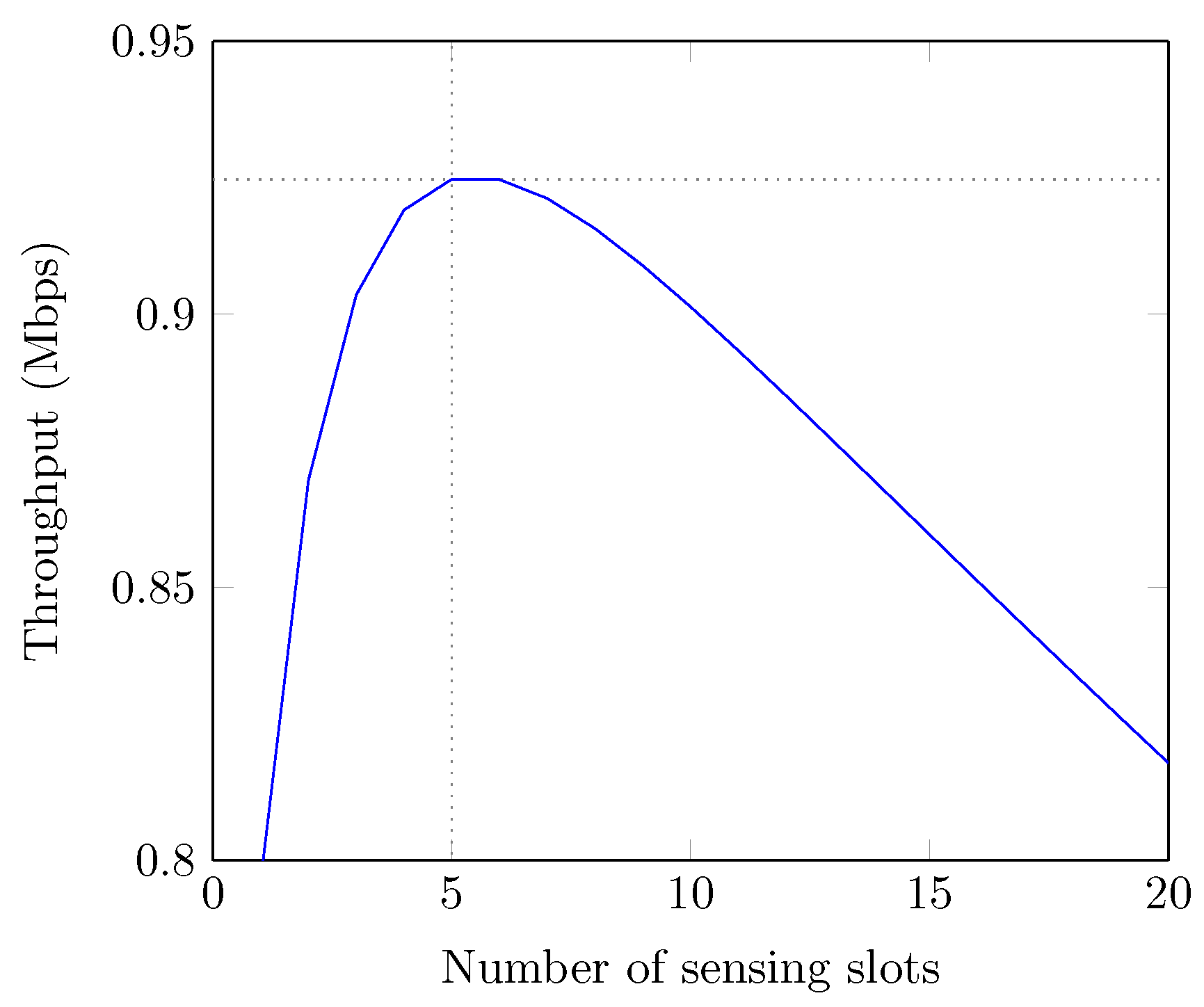
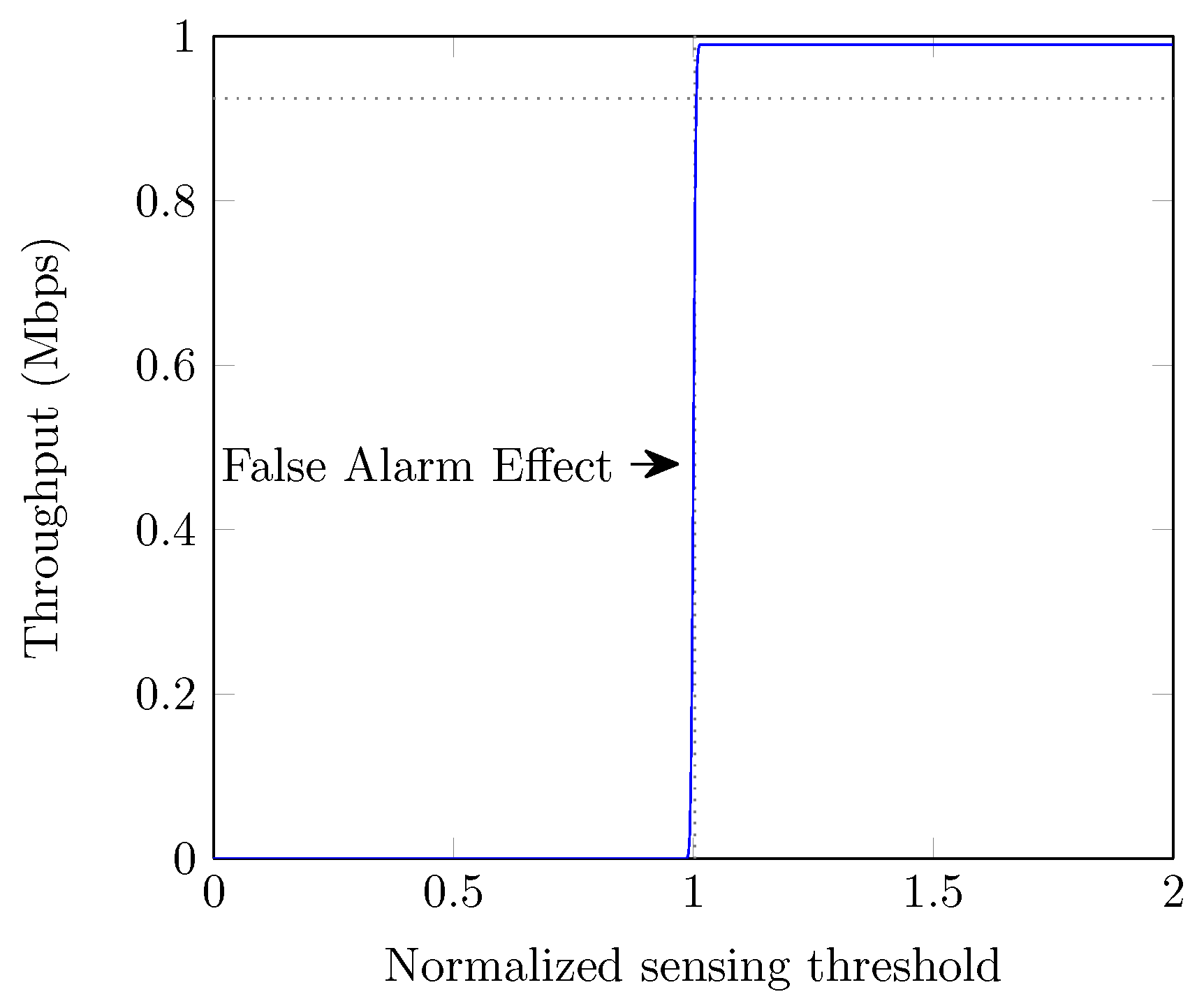
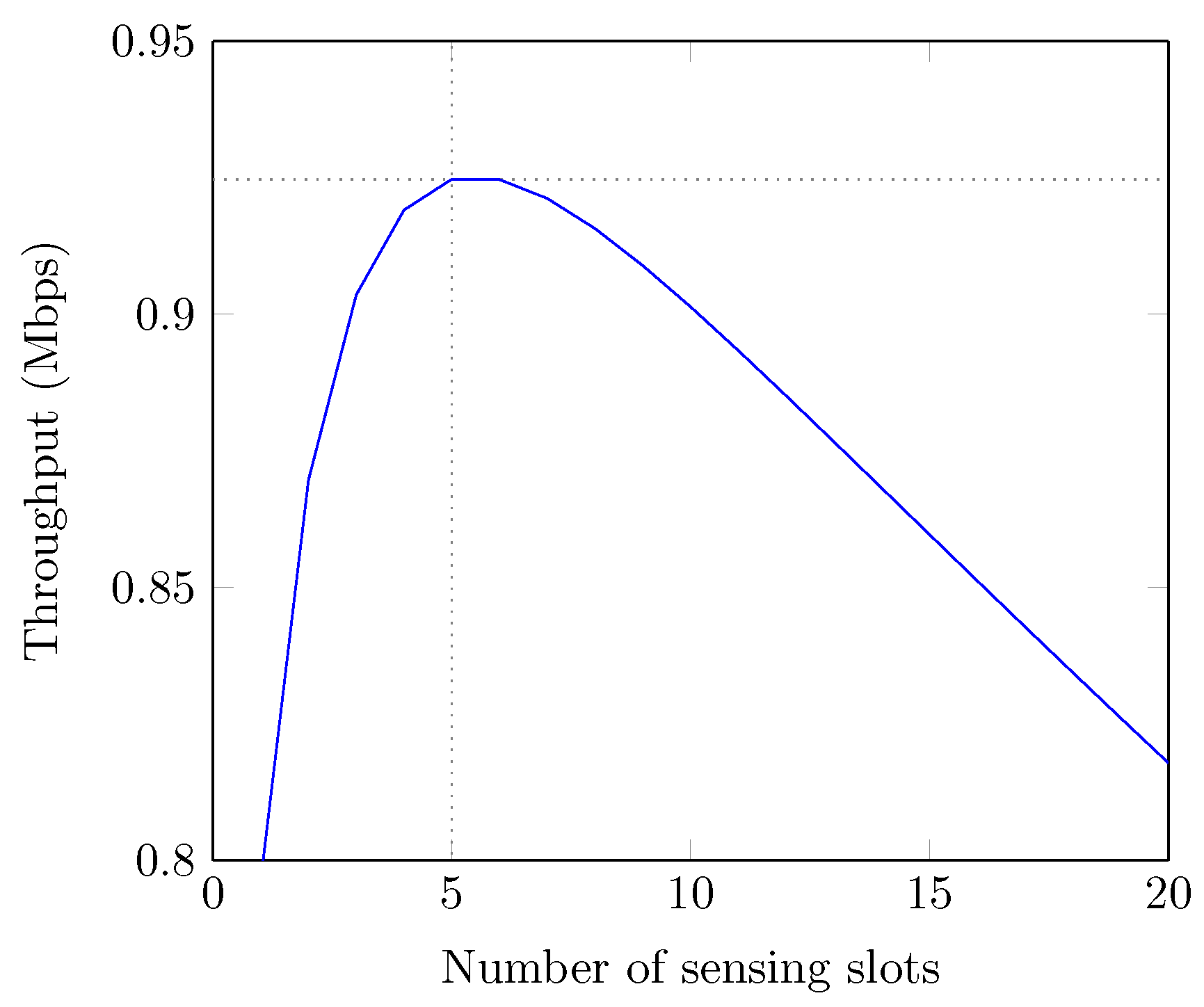
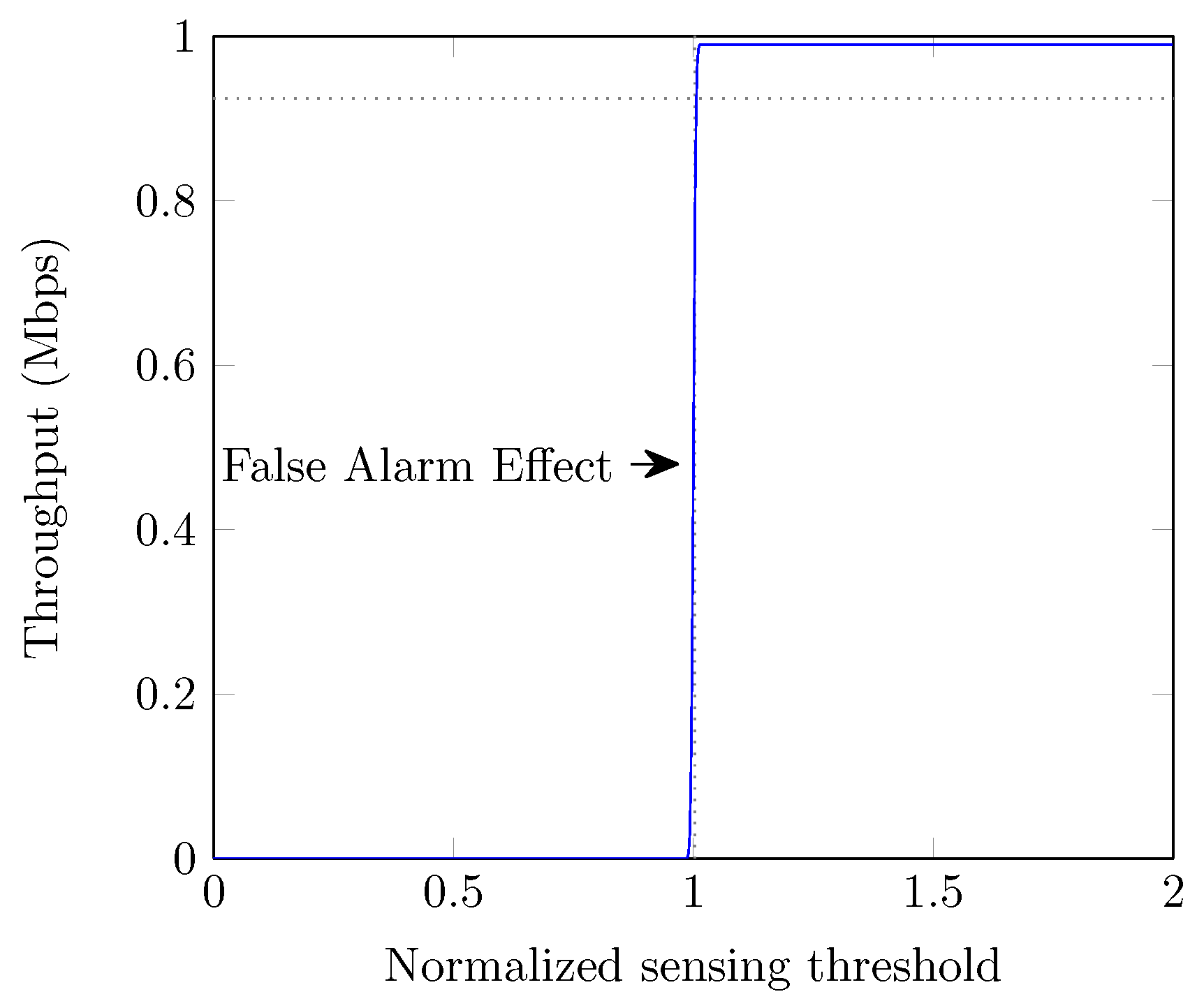
4.2. Spectrum Sensing Optimization
5. Performance Analysis
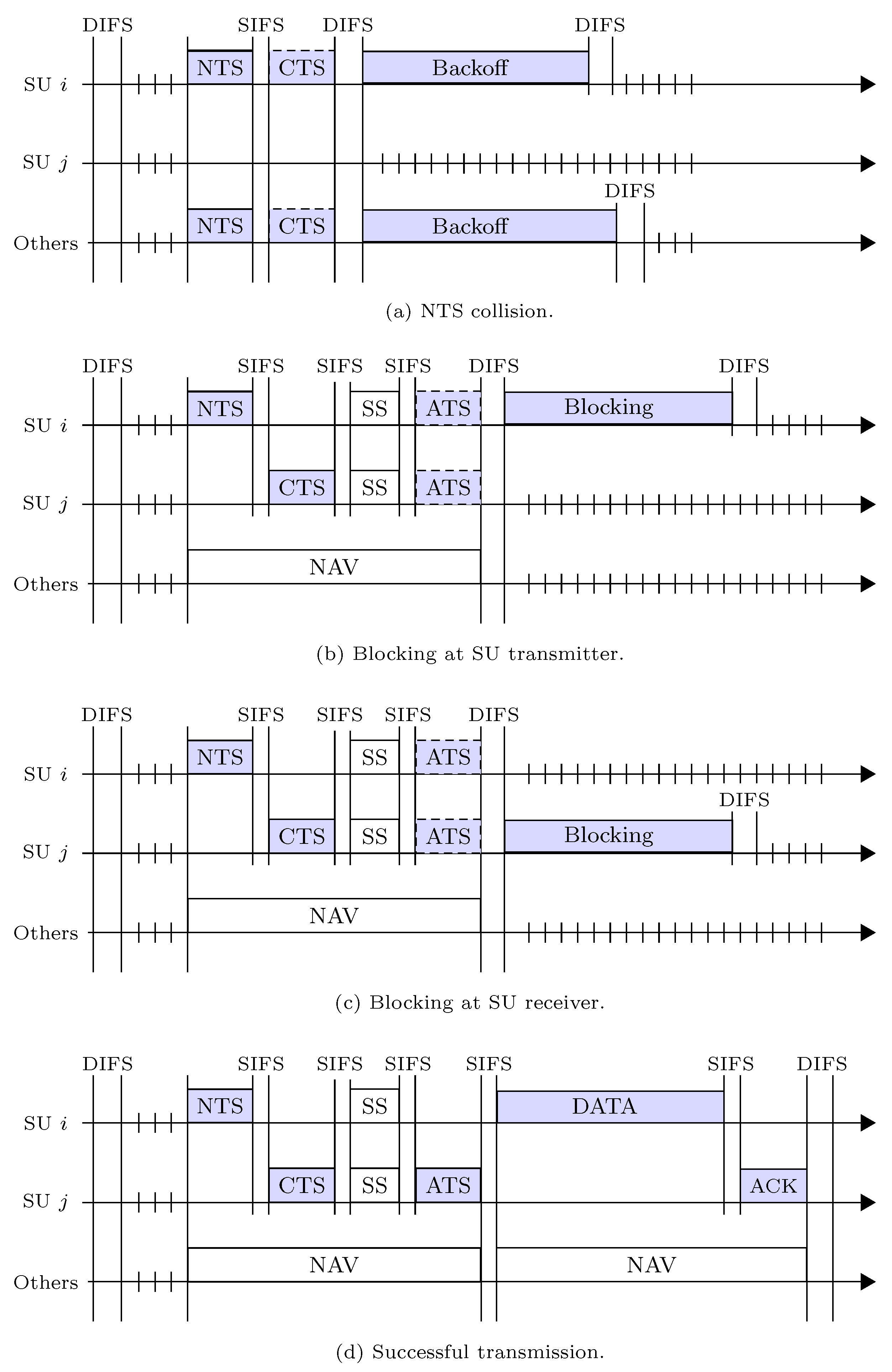
5.1. Packet Transmission Process
5.1.1. NTS collision
5.1.2. Blocking at SU Transmitter
5.1.3. Blocking at SU Receiver
5.1.4. Successful Transmission
5.2. Normalized Throughput
- The topology of the secondary network is composed of a fully connected complete graph, therein SUs are directly connected to each other with a single hop distance.
- The secondary network is saturated such that SUs have non-empty queues, in which there is always an DATA packet to send at each station.
- The transmission channel is error-free and there is no capture effect, so the packets are discarded when they receive collision.
- The control and DATA packets are sent through a single channel, which is shared among the SUs.
- The SUs use the same physical layer and their data transmission rate is also constant.
6. Results and Discussion
Simulation Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
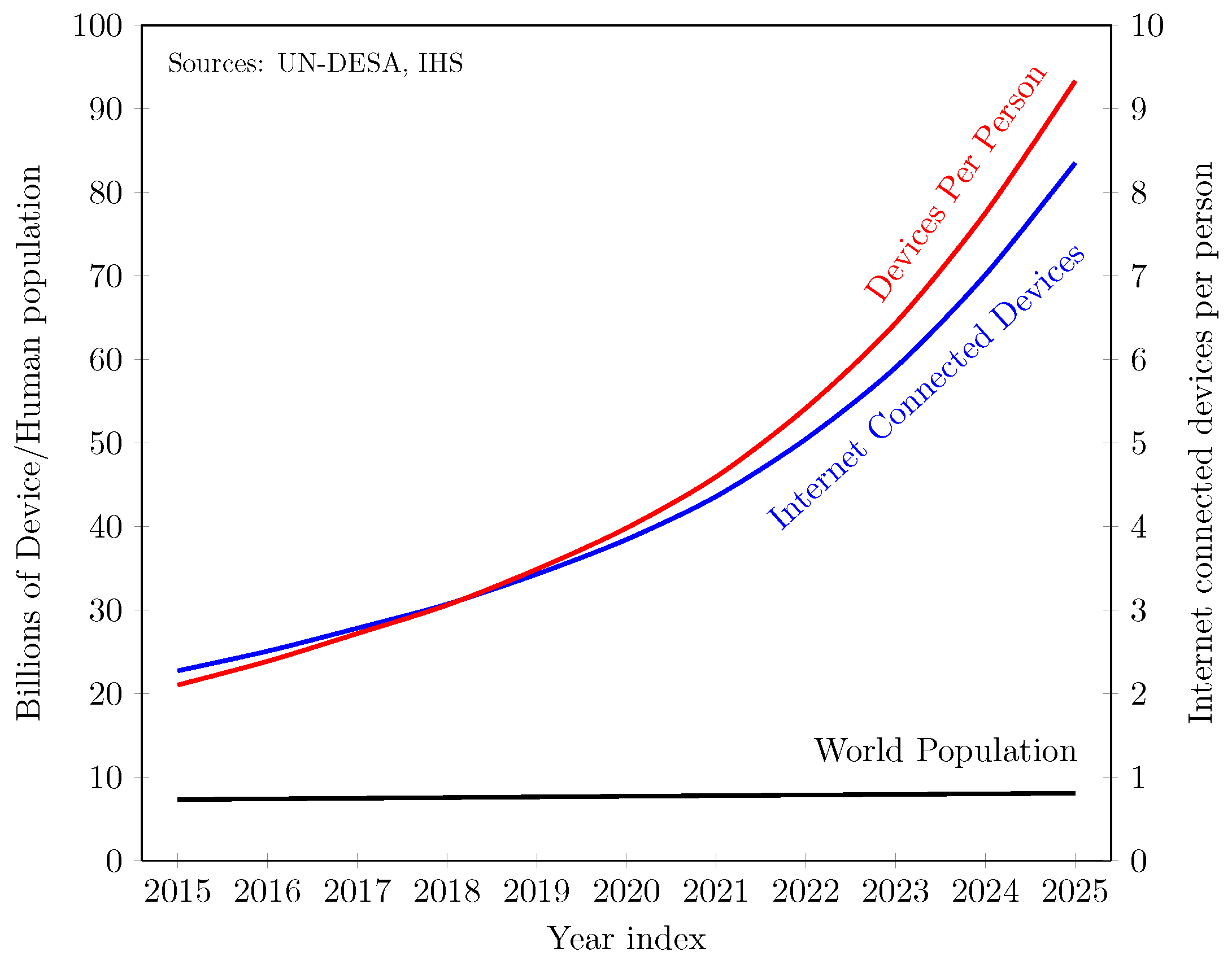
- Palattella, M.R.; Dohler, M.; Grieco, A.; Rizzo, G.; Torsner, J.; Engel, T.; Ladid, L. Internet of things in the 5G era: Enablers, architecture, and business models. IEEE J. Sel. Areas Commun. 2016, 34, 510–527. [Google Scholar] [CrossRef]
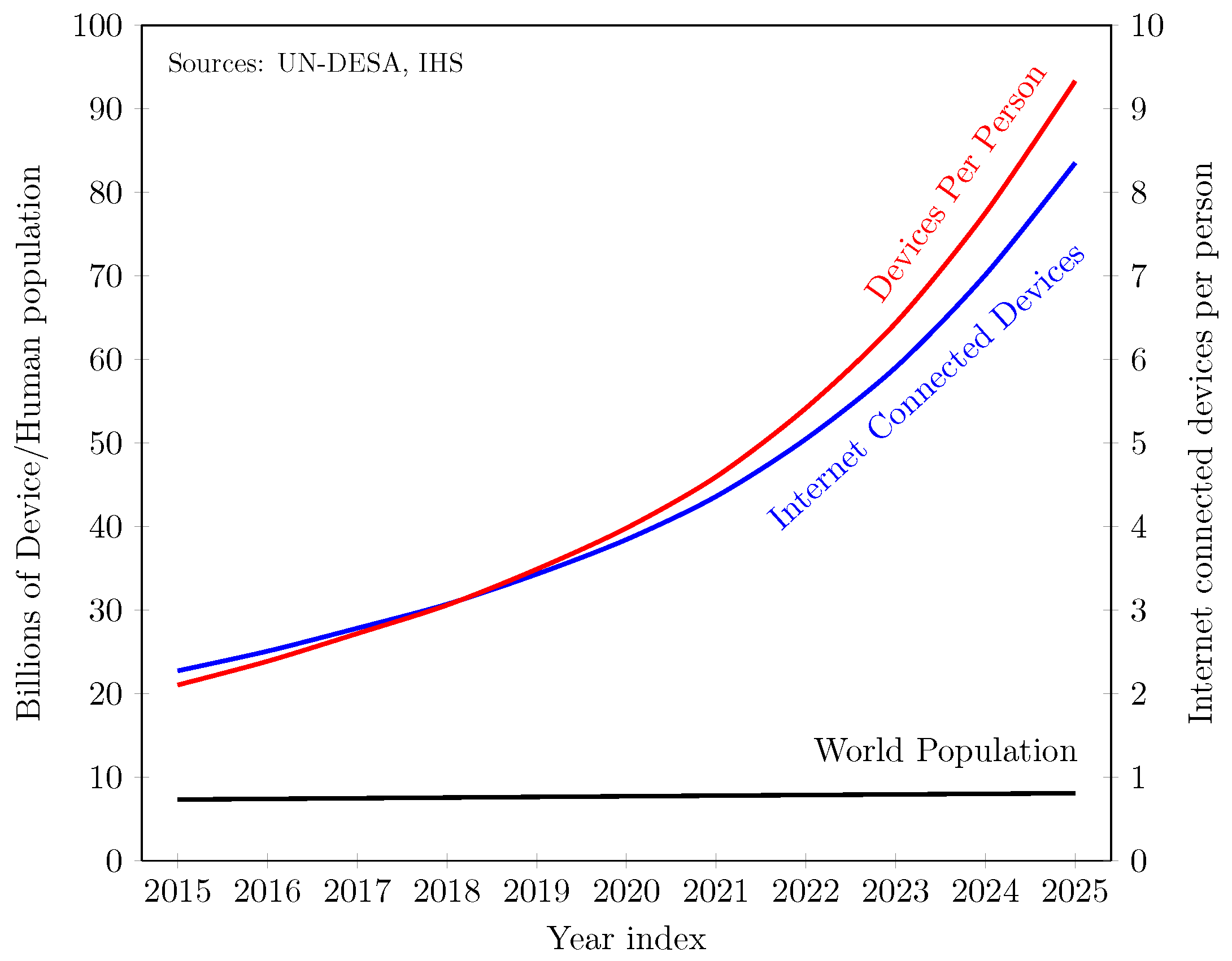
- Evans, D. The Internet of Things: How the Next Evolution of the Internet is Changing Everything; Cisco Internet Business Solutions Group: San Jose, CA, USA, 2011. [Google Scholar]
- Whitepaper: IoT Platforms-Enabling the Internet of Things 2016. Available online: https://www.ihs.com/Info0416/internet-of-things.html (accessed on 10 March 2018).
- World Population Prospects: The 2012 Revision; Population Division; UN, Department of Economic and Social Affairs: New York, NY, USA, 2013.
- Mitola, J.; Maguire, G.Q. Cognitive radios: Making software radios more personal. IEEE Pers. Commun. 1999, 6, 13–18. [Google Scholar] [CrossRef]
- Ali, K.A.; Rehmani, M.H.; Rachedi, A. When Cognitive Radio meets the Internet of Things. In Proceedings of the 2016 International Wireless Communications and Mobile Computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 469–474. [Google Scholar]
- Khan, A.A.; Rachedi, A.; Rehmani, M.H. Cognitive-radio-based internet of things: Applications, architectures, spectrum related functionalities, and future research directions. IEEE Wirel. Commun. 2017, 24, 17–25. [Google Scholar] [CrossRef]
- Lu, W.D.; Wang, J. Opportunistic Spectrum Sharing Based on Full-Duplex Cooperative OFDM Relaying. IEEE Commun. Lett. 2014, 18, 241–244. [Google Scholar] [CrossRef]
- Lertsinsrubtavee, A.; Malouch, N. Hybrid Spectrum Sharing through Adaptive Spectrum Handoff and Selection. IEEE Trans. Mob. Comput. 2016, 15, 2781–2793. [Google Scholar] [CrossRef]
- Musavian, L.; Aissa, S. Fundamental capacity limits of cognitive radio in fading environments with imperfect channel information. IEEE Trans. Commun. 2009, 57, 3473–3480. [Google Scholar] [CrossRef]
- Martinez, D.M.; Andrade, A.G. Reducing the effects of the noise uncertainty in energy detectors for cognitive radio networks. Int. J. Commun. Syst. 2017, 30, 1–17. [Google Scholar] [CrossRef]
- Pandit, S.; Singh, G. Spectrum Sensing in Cognitive Radio Networks: Potential Challenges and Future Perspective; Springer: Berlin, Germany, 2017. [Google Scholar]
- Shafiq, M.; Choi, J.-G. Adaptive Auction Framework for Spectrum Market in Cognitive Radio Networks. J. Netw. Syst. Manag. 2017, 1–29. [Google Scholar] [CrossRef]
- Ahmad, M.; Shafiq, M.; Irshad, A.; Afzal, M.K.; Kim, D.; Choi, J.-G. Adaptive and Economically-Robust Group Selling of Spectrum Slots for Cognitive Radio-Based Networks. Sensors 2018, 18, 2490. [Google Scholar] [CrossRef]
- Bentum, M.J.; Boonstra, A.J.; Baan, W.A. Impact of cognitive radio on radio astronomy. In Proceedings of the RFI Mitigation Workshop (RFI 2010), Groningen, The Netherlands, 29–31 March 2010; pp. 1–17. [Google Scholar]
- Ganesan, G.; Li, Y. Agility improvement through cooperative diversity in cognitive radio. In Proceedings of the IEEE Global Communications Conference, St. Louis, MO, USA, 28 November–2 December 2005; Volume 5, pp. 2505–2509. [Google Scholar]
- Cabric, D.; Tkachenko, A.; Brodersen, R. Spectrum Sensing Measurements of Pilot, Energy, and Collaborative Detection. In Proceedings of the IEEE Military Commun. Conference, Washington, DC, USA, 23–25 October 2006; pp. 1–7. [Google Scholar]
- Ganesan, G.; Li, Y. Cooperative spectrum sensing in cognitive radio networks. In Proceedings of the First IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Netw, Baltimore, MD, USA, 8–11 November 2005; pp. 137–143. [Google Scholar]
- Su, H.; Zhang, X. Cross-layer based opportunistic MAC protocols for QoS provisionings over cognitive radio wireless networks. IEEE J. Sel. Areas Commun. 2008, 26, 118–129. [Google Scholar] [CrossRef]
- Jeon, W.S.; Han, J.A.; Jeong, D.G. A novel MAC scheme for multichannel cognitive radio ad hoc networks. IEEE Trans. Mobile Comput. 2012, 11, 922–934. [Google Scholar] [CrossRef]
- Timmers, M.; Pollin, S.; Dejonghe, A.; Perre, L.V.; Catthoor, F. A distributed multichannel MAC protocol for multihop cognitive radio networks. IEEE Trans. Veh. Technol. 2009, 59, 446–459. [Google Scholar] [CrossRef]
- Jha, S.C.; Phuyal, U.; Rashid, M.M.; Bhargava, V.K. Design of OMC-MAC: An opportunistic multi-channel MAC with QoS provisioning for distributed cognitive radio networks. IEEE Trans. Wirel. Commun. 2011, 10, 3414–3425. [Google Scholar] [CrossRef]
- Salameh, H.A.B.; Krunz, M.M.; Younis, O. MAC protocol for opportunistic cognitive radio networks with soft guarantees. IEEE Trans. Mob. Comput. 2009, 8, 1339–1352. [Google Scholar] [CrossRef]
- Zhao, J.; Zheng, H.; Yang, G.-H. Distributed coordination in dynamic spectrum allocation networks. In Proceedings of the IEEE Dynamic Spectrum Access Networks (DySPAN 2005), Baltimore, MD, USA, 8–11 November 2005; pp. 259–268. [Google Scholar]
- Brandon, L.A. Survey of common control channel design in cognitive radio networks. Phys. Commun. 2011, 4, 26–39. [Google Scholar]
- Joshi, G.P.; Nam, S.Y.; Kim, S.W. Rendezvous Issues in AD Hoc Cognitive Radio Networks. KSII Trans. Internet Inf. Syst. 2014, 8, 3655–3673. [Google Scholar]
- Huang, S.; Liu, X.; Ding, Z. Opportunistic spectrum access in cognitive radio networks. In Proceedings of the IEEE INFOCOM, Phoenix, AZ, USA, 13–18 April 2008; pp. 1427–1435. [Google Scholar]
- Zhao, Q.; Tong, L.; Swami, A.; Chen, Y. Decentralized cognitive MAC for opportunistic spectrum access in ad hoc networks: A POMDP framework. IEEE J. Sel. Areas Commun. 2007, 25, 589–600. [Google Scholar] [CrossRef]
- Adamis, A.; Constantinou, P. Performance study of CSMA/CA over spectrum pooling environment for cognitive radios. In Proceedings of the Third IEEE International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob 2007), White Plains, NY, USA, 8–10 October 2007; pp. 31–36. [Google Scholar]
- Kondareddy, Y.R.; Agrawal, P. Synchronized MAC protocol for multi-hop cognitive radio networks. In Proceedings of the 2008 IEEE International Conference on Communications, Beijing, China, 19–23 May 2008; pp. 3198–3202. [Google Scholar]
- Chen, Q.; Liang, Y.-C.; Motani, M.; Wong, W.C. A two-level MAC protocol strategy for opportunistic spectrum access in cognitive radio networks. IEEE Trans. Veh. Technol. 2011, 60, 2164–2180. [Google Scholar] [CrossRef]
- Chen, Q.; Liang, Y.-C.; Motani, M.; Wong, W.C. CR-CSMA: A random access mac protocol for cognitive radio networks. In Proceedings of the 2009 IEEE 20th International Symposium on Personal, Indoor and Mobile Radio Communications, Tokyo, Japan, 13–16 September 2009; pp. 486–490. [Google Scholar]
- Chen, Q.; Motani, M.; Liang, Y.-C.; Wong, W.C. Opportunistic spectrum access protocol for cognitive radio networks. In Proceedings of the IEEE ICC 2011, Kyoto, Japan, 5–9 June 2011; pp. 1–6. [Google Scholar]
- Chen, Q.; Wong, W.C.; Motani, M.; Liang, Y.-C. MAC Protocol Design and Performance Analysis for Random Access Cognitive Radio Networks. IEEE J. Sel. Areas Commun. 2013, 31, 2289–2298. [Google Scholar] [CrossRef]
- Choi, Y.-J.; Park, S.; Bahk, S. Multichannel random access in OFDMA wireless networks. IEEE J. Sel. Areas Commu. 2006, 24, 603–613. [Google Scholar] [CrossRef]
- Kleinrock, L.; Tobagi, F. Packet switching in radio channels—Part I: Carrier sense multiple-access modes and their throughput-delay characteristics. IEEE Trans. Commun. 1975, 23, 1400–1416. [Google Scholar] [CrossRef]
- Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications, IEEE Std 802.11-2007 Part 11. 2007. Available online: https://ieeexplore.ieee.org/servlet/opac?punumber=7786993 (accessed on 25 November 2018).
- Shafiq, M.; Son, S.; Choi, J.-G.; Yu, H. CR-MEGA: Mutually Exclusive Guaranteed Access Control for Cognitive Radio Networks. In Proceedings of the IEEE Future Technologies Conference (FTC 2017), Vancouver, BC, Canada, 29–30 November 2017; pp. 89–96. [Google Scholar]
- Shafiq, M.; Choi, J.-G.; Irshad, A. Random Access Control for Cognitive Radio Networks with Hybrid Spectrum Sensing Technique. In Proceedings of the International Workshop on Electronics and Commun (WEC 2014), Chengdu, China, 27–28 October 2014. [Google Scholar]
- Shafiq, M.; Choi, J.-G.; Yu, H.; Afzal, M.K. Multiple Access Control with Adaptive Spectrum Sensing Technique for Cognitive Radio Networks. In Proceedings of the International Workshop on Emerging ICT (JCK-WS 2016), Tohoku University Sendai, Japan, 31 October–2 November 2016. [Google Scholar]
- Arslan, H.; Yücek, T. Spectrum sensing for cognitive radio applications. In Proceedings of the Cognitive Radio, Software Defined Radio, and Adaptive Wireless Systems, St. Petersburg, Russia, 27–29 August 2007; pp. 263–289. [Google Scholar]
- Sutton, P.D.; Nolan, K.E.; Doyle, L.E. Cyclostationary signatures in practical cognitive radio applications. IEEE J. Sel. Areas Commun. 2008, 26, 13–24. [Google Scholar] [CrossRef]
- Shafiq, M.; Choi, J.-G. MSMA/CA: Multiple Access Control Protocol for Cognitive Radio-Based IoT Networks. J. Internet Technol. 2017. accepted. [Google Scholar]
- Cabric, D.; Mishra, S.M.; Brodersen, R.W. Implementation issues in spectrum sensing for cognitive radios. In Proceedings of the Signals, Systems and Computers, Pacific Grove, CA, USA, 7–10 November 2004; Volume 1, pp. 772–776. [Google Scholar]
- Liang, Y.-C.; Zeng, Y.; Peh, E.; Hoang, A.T. Sensing-throughput tradeoff for cognitive radio networks. IEEE Trans. Wire. Commun. 2008, 7, 1326–1337. [Google Scholar] [CrossRef]
- Manesh, M.R.; Apu, M.S.; Kaabouch, N.; Hu, W.C. Performance evaluation of spectrum sensing techniques for cognitive radio systems. In Proceedings of the IEEE Annual 2016 Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 20–22 October 20; pp. 1–7.
- Akyildiz, I.F.; Lee, W.-Y.; Chowdhury, K.R. CRAHNs: Cognitive radio ad hoc networks. Ad Hoc Netw. J. 2009, 7, 810–836. [Google Scholar] [CrossRef]
- Mauwa, H.; Bagula, A.; Zennaro, M.; Pietrosemoli, E.; Lysko, A.; Brown, T.X. Systematic analysis of Geo-location and spectrum sensing as access methods to TV white space. In Proceedings of the IEEE ITU Kaleidoscope: ICTs for a Sustainable World (ITU WT), Bangkok, Thailand, 14–16 November 2016; pp. 1–8. [Google Scholar]
- Wyglinski, M.; Nekovee, M.; Hou, T. Cognitive Radio Communications and Networks: Principles and Practice; Academic Press: Burlington, MA, USA, 2009. [Google Scholar]
- Csurgai-Horvath, L.; Rieger, I.; Kertesz, J. A Survey of the DVB-T Spectrum: Opportunities for Cognitive Mobile Users. Mob. Inf. Syst. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Mehdawi, M.; Riley, N.; Paulson, K.; Fanan, A.; Ammar, M. Spectrum occupancy survey in HULL-UK for cognitive radio applications: Measurement and analysis. Int. J. Sci. Technol. Res. 2013, 2, 231–236. [Google Scholar]
- Patil, K.; Prasad, R.; Skouby, K. A survey of worldwide spectrum occupancy measurement campaigns for cognitive radio. In Proceedings of the International Conference on Devices and Communications (ICDeCom), Mesra, India, 24–25 February 2011; pp. 1–5. [Google Scholar]
- Chong, J.W.; Sung, Y.; Sung, D.K. RawPEACH: Multiband CSMA/CA-based cognitive radio networks. J. Commun. Netw. 2009, 11, 175–186. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| , | Active probability of PU around SU i |
| Inactive probability of PU around SU i | |
| Probability of false alarm by SU i | |
| Probability of misdetection by SU i | |
| N | Number of slots in a spectrum sensing period |
| Length of a spectrum sensing slot | |
| Probability of interference to hidden primary terminals | |
| A | Activity factor of hidden primary terminals |
| h | Number of hidden primary terminals |
| C | Capacity of the wireless channel |
| Probability of channel clearance from the active PU at SU i | |
| Probability of the encountered event () | |
| Time delay by encountered event () | |
| Probability of empty slots | |
| Probability of transmission slots | |
| Probability of no-transmission slots | |
| E | Transmission rate of the wireless channel |
| p | Probability of a failed transmission |
| q | Probability of a successful transmission |
| Probability of transmission trial by SU i | |
| Probability of packet transmission by an SU | |
| H | Size of the PHY plus MAC headers |
| P | Size of the packet payload bits an arbitrary SU |
| Length of an empty (or backoff) slot | |
| Probability of packet transmission by an SU | |
| Initial contention window size | |
| m | Backoff stage of an arbitrary SU |
| Size of contention window at m-th stage | |
| , | Sensing threshold, Normalized sensing threshold |
| , | Throughput, Normalized throughput of HSMA/CA |
| M | Maximum retrial limit of an arbitrary SU |
| Maximum contention window size | |
| , T | Noise power, Length of a spectrum sensing period |
| Average length of an arbitrary slot | |
| Average time delay of a successful transmission | |
| Average time delay of a failed transmission |
| Parameter Name | Value |
|---|---|
| PHY header | 120 bits |
| MAC header | 272 bits |
| Payload data unit | 8184 bits |
| NTS | 160 bits + PHY header |
| CTS, ATS and ACK | 112 bits + PHY header |
| SIFS time | 10 s |
| DIFS time | 50 s |
| Idle slot time | 20 s |
| Neighbor PU activity rate | 0.01 |
| Maximum spectrum sensing time | 0.70 ms |
| Transmission rate | 1 Mbps |
| Initial contention window size () | 32 |
| Maximum contention window size () | 1024 |
| Maximum retry limit (M) | 5 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shafiq, M.; Ahmad, M.; Khalil Afzal, M.; Ali, A.; Irshad, A.; Choi, J.-G. Handshake Sense Multiple Access Control for Cognitive Radio-Based IoT Networks. Sensors 2019, 19, 241. https://doi.org/10.3390/s19020241
Shafiq M, Ahmad M, Khalil Afzal M, Ali A, Irshad A, Choi J-G. Handshake Sense Multiple Access Control for Cognitive Radio-Based IoT Networks. Sensors. 2019; 19(2):241. https://doi.org/10.3390/s19020241
Chicago/Turabian StyleShafiq, Muhammad, Maqbool Ahmad, Muhammad Khalil Afzal, Amjad Ali, Azeem Irshad, and Jin-Ghoo Choi. 2019. "Handshake Sense Multiple Access Control for Cognitive Radio-Based IoT Networks" Sensors 19, no. 2: 241. https://doi.org/10.3390/s19020241
APA StyleShafiq, M., Ahmad, M., Khalil Afzal, M., Ali, A., Irshad, A., & Choi, J.-G. (2019). Handshake Sense Multiple Access Control for Cognitive Radio-Based IoT Networks. Sensors, 19(2), 241. https://doi.org/10.3390/s19020241