1. Introduction
City traffic is changing worldwide. Policies are designed to reduce the number of conventional fuel vehicles in city centers, to reduce pollution levels and give more space to other traffic participants [
1]. This should make it possible to improve public transport services so that people use them more. In addition, it is creating opportunities for the use of less contaminating means of transport (e.g., bicycles, scooters, and electric cars). These can better satisfy users’ requirements regarding the environment, health, and costs, while circumventing policies to restrict access to some city areas. Frequently, they also offer mobility which is more tailored to individual needs, with vehicles smaller than cars or motorbikes. These vehicles are appearing in large numbers in cities, often as part of vehicle-sharing services [
2,
3].
With these trends, we are seeing a rise in the number of areas with shared spaces [
4]. These are characterized by the blurring of barriers to segregate different types of traffic, for instance, areas with shared paths or painted lanes. This produces multi-modal traffic flows where interactions among participants become more complex [
5], as there is a greater variety of perceptions to evaluate regarding traffic and the environment, the capabilities of vehicles, people’ characteristics, and situations.
These shared environments make it necessary to reconsider the design of Driver Assistance Systems (DASs) [
6] and Intelligent Transportation Systems (ITSs) [
7]. These aim to enhance different aspects of traffic and travelling, such as active and integrated safety, fuel and energy consumption, and vehicle flows. For this purpose, they use different types of information, e.g., type and location of traffic signals, lanes, and the position and speed of obstacles. However, this “traditional” information does not seem to be enough in shared spaces, where methods of movement are heterogeneous, distances between participants are short, and trajectories can suddenly change. Here, the systems need more detailed information to provide their services.
One of the potential new types of information are the
social aspects considered in this work. These include factors that affect people’s behaviors and depend on their personal characteristics (e.g., gender, age, and capabilities), the surrounding people (e.g., type of companion or crowd), the resources they use (e.g., type of vehicle and mobile phones), and the context (e.g., activity and meaning of the environment). The literature already acknowledges the influence of these aspects on traffic (e.g., pedestrians in groups [
8], bicycles [
9], or passengers [
10]).However, there are few studies that focus on how to incorporate them into traffic systems, and most of them adopt ad-hoc approaches [
6,
7]. This makes it difficult to integrate systems or different information types to provide more sophisticated services.
The current study develops a framework for Social-Aware DASs (SADASs). These are intended to facilitate the inclusion of the previous social aspects in traffic systems. This is achieved through mechanisms for flexible management of that information, which can be adapted to different requirements and integrated with other information and components. This social information allows traffic systems to better understand their context and how different actors and elements can behave accordingly, thus improving their decision-making.
The SADAS framework has two components. The first one is a Modelling Language (ML) to specify social information and its transformation. The second one is the architecture that implements that processing and determines the interfaces to interact with the other elements in traffic systems.
The ML for SADAS (i.e., the SADAS-ML) is based on two previous studies. First, a general framework with an ML (i.e., the ITSML) to model and simulate ITSs [
11]. Its concepts include among others
sensor and
actuator,
agent and
person,
vehicle, and
information and
method. Second, a framework to model social systems in engineering contexts based on the concept of social activity [
12].
The SADAS-ML extends the ITSML with new concepts to model social information and its changes. For instance, the types for low-level sensor data and social information, physical objects and their characteristics, and processes such as social activities and information transformations. The language also introduces reliability attributes to indicate different degrees of certainty about information.
In this context, reusable knowledge is characterized as
traffic social properties. This follows the studies on
social properties [
12] as patterns on social information for software engineering. In SADASs, the properties describe prototypical information applicable in a wide range of traffic situations. For instance, that near a hospital there could be people with reduced mobility. This knowledge is usually extracted from literature, reports, and statistics. The properties are specified following the template for the original
social properties [
12], though using concepts and diagrams that conform to the SADAS-ML. Here, the discussion uses only the diagrams in these templates.
The framework also defines an architecture to work with the social information. It corresponds to a Multi-Agent System (MAS) [
13] with several specific
social components. These include:
sensing agents to transform low-level data from sensors into information;
reasoner agents to derive new information from that available;
observer agents that send the information to the rest of the traffic system and support external queries. These agents use specific resources to support their functionality, such as a social engine to derive information using processes. This kind of architecture follows common practices in information fusion [
14].
The processing of this social information uses a pattern-matching algorithm. It looks for instances of the query specifications among available information. When it is successful, it applies the processes linked to the query. For example, this allows it to be checked that current information meets some property, or to derive new information.
The case study that illustrates the application of the framework integrates two studies and extends them with a SADAS to improve their services. The first study is an ITS [
15] for the adaptive control of traffic signals using a hierarchical control strategy. It includes sensors such as cameras and inductive loops. The second one is a DAS [
16] that supports the distributed detection of pedestrians from cars with cameras. The use of cameras in both systems allows characteristics to be extracted from the environment and participants in traffic [
17,
18]. The SADAS uses this information to derive new information on people’s potential behaviors given their activities. This allows traffic signals and vehicle warnings to be adjusted for safer and more fluid traffic than in the original studies. This example is complemented with an additional discussion on other case studies.
The rest of the paper is organized as follows.
Section 2 introduces the background on the ITS framework [
11] and social properties [
12].
Section 3 describes the components of the SADAS framework. The experimentation in
Section 4 illustrates the use of the approach with the case study and contains an extended discussion.
Section 5 compares the framework with related work. Finally,
Section 6 discusses some conclusions and future work.
2. Background
The SADAS framework appears in the context of traffic systems and the management of social information. Its components and the information models relating to traffic are described using extensions of the concepts in the general modelling framework for ITSs in [
11] (see
Section 2.1). The description of social aspects extends the work on social properties [
12] (see
Section 2.2).
2.1. ITS Modelling and Simulation Framework
This framework aims to facilitate the Model-Driven Engineering (MDE) of simulations of ITSs [
11]. In MDE approaches [
19], development artefacts (e.g., code, documentation, and tests) are mostly generated from system specifications (i.e., models) using semi-automated transformations. In the case of this framework, such specifications are compliant with the ITSML. Its conceptual framework is based on the Driver-Vehicle-Environment (DVE) approach [
20].
The base concept of the ITSML is the component, which represents a general element of an ITS or the environment. It has an internal state defined as attributes, and interfaces characterized as methods (e.g., consult, modify and act). Control and information flows among components use those methods. A component can also have other components as parts.
Attributes, and the parameters and results of methods, are defined as pieces of information. They have a name, a type, and sometimes a value. Types can be primitive ones (e.g., string, Boolean and integer) or a reference to an already defined type of information.
An ITS consists of multiple containers and communication channels connecting them. Containers are computational nodes for sensors, actuators, utilities, and their controller managers. Sensors perceive events from the environment and use their methods to generate notifications to other components. These notifications can trigger the execution of methods, which in turn can generate new notifications. The triggered methods can belong to other sensors, actuators that act on the environment, or utilities that are pure software components working inside an ITS. Managers are agents that use the available information to check their goals and decide what tasks to attempt. The execution of these tasks can invoke methods.
Outside the ITS, there is an external environment that comprehends things (e.g., roads and signals). Persons actuate in this environment. Some of them can be in vehicles, either as drivers or passengers. All these elements are subclasses of a general place class and can interact with the others through their interfaces. A place contains multiple spots. These are both elements that can be observed and where containers can be located.
Following MDE practices, the ITSML is specified with a metamodel that includes the previous concepts. Metamodels define the abstract syntax of graph-based MLs, i.e., their primitives and constraints [
19]. Meta-MLs (MMLs) to define these metamodels usually have as primitives
nodes,
relationships, and
roles (i.e., the ends of relationships that connect them with nodes).
Properties are attributes or adornments of these elements. Some examples are names, visibility, or cardinality indications for roles.
There are also some standard relationships included in many MDE MLs, which correspond to similar ones existing at the level of their MMLs [
21]. Examples of them are inheritance and composition relationships, which the ITSML also includes. These relationships are introduced to facilitate making specifications with the MLs. Following usual conventions in the area [
22], in diagrams below, relationships with triangles represent inheritance, and with diamonds represent aggregation, using filled diamonds for composition and hollow diamonds for plain aggregation.
Elements in these MLSs can be in packages, and their fully qualified name includes the package name. For instance, the package “ITS” for the ITSML, and the fully qualified name of “component” as “ITS::component”.
At the level of the ITSML, the language also includes mechanisms to instantiate classes. In the metamodel, for a name meta-type, there is another Iname to represent its instances. The instanceOf meta-relationship links both meta-types. This allows linking instances to their actual types in models. For instance, the ISensor meta-type is linked by the instanceOf meta-relationship to the Sensor meta-type. With this, a model could have a sensor type named “Temperature sensor” (i.e., Sensor stereotype) with an actual instance named “Sensor1” (i.e., ISensor stereotype).
2.2. Social Properties
The work on
social properties [
12] seeks to provide effective ways to apply the knowledge from Social Sciences in Software Engineering. This entails having guidelines for its application supported by software tools. Its theoretical background comes from the Activity Theory (AT) [
23], which is focused on the description and analysis of social activities and their contexts. It establishes a conceptual framework and the rules that govern the evolution of activities.
The core concept of the AT is the activity. It represents a transformation act that is both intentional and social. The intentionality appears because all the participants endeavor to satisfy some high-level needs through the activity. The social dimension is due to the fact that every activity happens in a society/group, i.e., a subject (or group) carries it out using artefacts created by a society. Activities can mix both mental (e.g., learning and planning) and physical (e.g., driving or lifting a weight) aspects.
An activity is performed by subjects pursuing their objectives, which represent their needs. These objectives are satisfied by the activity’s outcome. The transformation of objects using tools produces those outcomes. The community represents the group where the activity takes place. In a wide sense, it represents the set of subjects that share an environment and meanings both now and historically. Two artefacts mediate the relationship between the activity and its community. The division of labor specifies how the community is organized for the execution of the activity. The rules are cultural artefacts that influence the activity, e.g., norms and tales. The ensemble of all the previous elements constitute the activity system of an activity.
There are two additional types of transformations. Activities are decomposed into actions. These are conscious intentional acts, but their goals do not correspond to high-level needs. Actions are in turn decomposed as operations, which are to a large extent non-conscious and only depend on the environment conditions.
Specifications of social contexts take the form of networks of activity systems linked by shared elements. These elements can play different roles in those activity systems, e.g., the object of an activity system can be a rule in another.
These networks evolve over time. Their elements change (e.g., they suffer damage or acquire new capabilities), and they appear and are destroyed. These changes produce competing goals and inadequacies between purposes and characteristics of elements. The AT names these conflicts
contradictions [
24]. Contradictions make activities somehow unsuitable to satisfy the subjects’ needs. For this reason, subjects try to remove or mitigate them by changing the activity systems. For instance, they can change some elements or introduce alternative activities. These changes are usually the origin of new tensions that produce further evolution.
The UML-AT ML [
12] formalizes this theoretical framework with a Unified-Modelling Language (UML) profile [
22]. It uses stereotypes to represent these concepts and their relationships. It also includes additional elements to facilitate the specifying tasks. For instance, the type
artefact represents any type in an activity system, and the relationship
change of role that a given concept adopts different types. It also includes some usual primitives in MDE MLs [
21] such as relationships to represent aggregation and inheritance, and cardinality adornments.
In this context, social properties represent knowledge about social activities applicable in different contexts and extracted from literature in Social Sciences. Their specification uses a template that combines UML-AT diagrams and text.
A pattern-matching algorithm uses those diagrams to check properties. It looks in available information for instances of the query specifications. The appearance of an instance of a property is used to explain the meaning of the information located, and its absence that those specifications do not satisfy the property.
This approach has been used in a variety of domains [
12]. Some examples are social analysis, cooperative work, and e-learning.
3. The SADAS Framework
The SADAS framework seeks to extend traffic systems with social information. To do so, it must interpret the available raw information to derive social information. For instance, from the observed position of a vehicle and a map indicating a nearby park, that there could be children, and thus speed must be reduced. This derived information includes characteristics of the people and their movements, activities, companion, and environment. From it, a SADAS can infer potential interactions with those elements in the near future and provide information based on that to the rest of the traffic system.
To achieve this functionality, the framework provides an ML to specify social information and its transformations (see
Section 3.1). Traffic social properties are ready-to-use specifications that represent knowledge of recurrent situations or changes (see
Section 3.2). A MAS architecture is used to process all these specifications (see
Section 3.3).
3.1. SADAS-ML
The SADAS-ML is a specific language for managing social information. It defines primitives to represent that information (see
Section 3.1.1) and its processing (see
Section 3.1.2). For the information, it extends elements from the ITSML and UML-AT MLs (see
Section 2) following the guidelines in [
21,
25]. For the processing, it mainly adopts the AT concept of activity [
23] (which is already present in the UML-AT, see
Section 2.2), and the new one of
transformation. The language also supports some general features regarding type instantiation and the use of variables (see
Section 3.1.3).
3.1.1. Social Information
The specification of social information relies on a conceptual hierarchy whose base element is the
component meta-type.
Figure 1 summarizes the base primitives related to it. They are the more abstract types of the SADAS-ML.
The
component meta-type extends the ITSML
component (see
Section 2.1) and represents any concept in the problem domain. Its only attribute is the
id, which must be unique among all instances of a specification. It can also have an arbitrary set of string
tags to describe it in a tailored way. For instance, to depict a point as a school or a museum. It can define arbitrary
associations with other component meta-types.
The component sub-types in the metamodel are the element and the process. The former represents concepts, and the latter functionality.
The
element extends the
component meta-type and the UML-AT concept of
artefact (see
Section 2.2). It adds a
timestamp attribute and may have
methods (which extend the SADAS-ML
process meta-type). The timestamp corresponds to the moment of its creation or update. It also includes reliability attributes to characterize the confidence in their information. These are the following.
Certainty indicates how probable the information is to be true using a value in
category. For instance, a sensor working in an environment with high-levels of noise probably perceives data of
low certainty.
Generation classifies information between
observed and
derived. For instance, the maximum speed of a vehicle is
observed when asserted according to sensor data, while
derived when deduced from observations on its previous speeds. In the case of observed information, the
source identifies its generator (e.g., specifications, sensor, or software).
Scheduling distinguishes between
past,
actual,
foreseen, and
stale information. Past information was applicable, actual is at the current moment, foreseen is expected to be in the future, and stale was foreseen but no longer and it did not become actual. For instance, when pedestrians are arriving at a crosswalk, it is foreseen that they will continue and cross; when they disappear from images, the expectation that their position is close to the last one will become stale after some time without them reappearing. These attributes are used to prioritize decisions based on information.
The element sub-types in the metamodel are data and information. The former is used to represent sensor observations as opposed to the latter for abstracted social information.
Information has as its sub-type
object, which represents elements from the traffic system or the external environment.
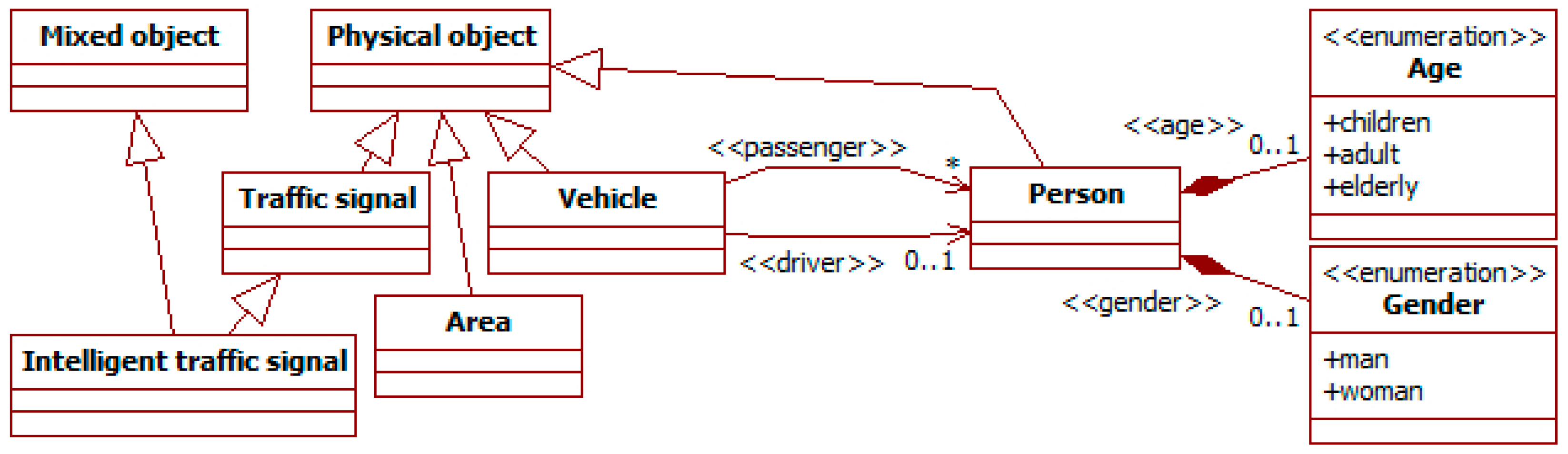
Figure 2 shows it with its immediate sub-types.
The
object for location meta-type distinguishes objects according to whether they have an associated location. They can be
physical (e.g., a person, vehicle, or sensor),
intangible (e.g., a group, norm or interaction), and
mixed (e.g., an activity or a museum with physical facilities and an intangible website). Physical objects have a
track to describe their movement. This has two attributes for its general characterization.
Maneuverability indicates the observed ability to change direction sharply, and
fastness describes the potential fastest speed. Both attributes take values in
category (see
Figure 1) to give a qualitative approximation to those characteristics. The track path is described as a sequence of
points over time. The
near relationship indicates that two points are in close positions.
The
agent sub-type of object represents an intentional and social entity in the vein of the AT subject (see
Section 2.2). The ML introduces it at this level to solve the dichotomy between its two sub-types:
software agents in traffic systems, which are mixed objects; and
persons, which are physical objects.
Figure 3 shows the hierarchy of concepts starting in the
physical object meta-type. There are several sub-types:
area,
traffic signals,
person and
vehicle.
Areas represent terrain extensions whose perimeter is delimited by the points in their track. They are used to specify delimited spaces, such as buildings or neighborhoods.
Traffic signals describe any sign or signal related to traffic. Examples of these are signals of speed limits or marks delimiting lanes. Its intelligent traffic signal sub-type is a mixed object. It includes as physical components traffic lights (with red, green, and yellow lights), a display, a speaker, and cameras to perceive surrounding traffic of both pedestrians and vehicles. It also includes the software controllers for these elements, which are intangible objects. With these features, this intelligent signal can represent most devices of this type in literature.
The person sub-type represents people in traffic. Its attributes describe their physical state (e.g., age and gender) or their socio-economic characteristics.
People can travel in vehicles represented by the
vehicle meta-type. It has several sub-types not shown in the figure, such as
car,
motorbike,
bicycle and
scooter. Their characteristics are described with specific values for the attributes inherited from their super-classes (e.g., the fastness from physical object), or additional attributes. Persons can be their drivers or passengers, as in the ITSML (see
Section 2.1).
People can also move together in
groups (see
Figure 4). These are intangible objects, as they only represent the association among their participants. A group has a
proximity attribute to represent how close those ties are. For instance, a family group usually has a
high value of proximity.
3.1.2. Processing
As introduced before, the
process meta-type represents functionality (see
Figure 1). This functionality for a type is described as transformations of
component types (see
Figure 5). Its semantics is that, when instances of all its
input types are available, it produces instances of all its
output types, meeting the constraints specified in its definition. Outputs can also be marked as
delete to indicate that an instance and all its dependents (i.e., targets of aggregation relationships) will be removed. Processes can have “snippets” to further specify these changes. Such snippets are described with arbitrary languages, e.g., plain text, code, or logics.
There are three sub-types of process (see
Figure 5).
Transformations represent automated derivations whose execution only depends on their information context. That is, when available information meets their input constraints, they always generate their output.
Methods are attached to the element of which they represent a capability.
Activities have an intentional and social meaning for their participants according to the AT [
23]. They indicate specific roles of inputs and outputs (e.g., subject, rules, or tool), and always have at least one agent acting as the
subject that executes them.
Inputs and outputs can have adornments. Existence adornments specify conditions on the availability of instances of a given input type: “NOT” for the absence of instances; “ANY” for the presence of at least one instance; “ALL” for every available instance of the input type. Both inputs and outputs can use cardinality adornments: * to indicate any number of instances equal to or greater than 0, a number for that exact number of instances, or a range N..M for several instances equal to or greater than N and equal to or less than M.
3.1.3. General Characteristics
Social information is specified using these meta-types (e.g., person or vehicle) in models. As in the ITSML, for every name meta-type, there is an Iname meta-type for its instances, and an instanceOf meta-relationship to link them. This allows distinctions to be made in models between types (with the stereotype name) and instances of these types (with the stereotype Iname). For instance, Person is the stereotype of instances of the meta-type Person in models, which are types (e.g., Young driver); the instances of these types use the stereotype IPerson (e.g., Person1 who is a young driver). The actual type of a model instance can be indicated with the instanceOf relationship. In the following diagrams, when the type of an Iname instance is omitted (no specific instanceOf relationship), it is considered to belong to any type of the indicated name meta-type.
Attributes of both types and instances can have values or not. Values introduce constraints over attributes. For instance, a person type without a value for age represents instances of any age, but with a value, only instances of that specific age. If the attribute has a value, this can be a constant or a variable. Constants are represented with their literal (e.g., 5, true or “museum”). Variables are represented with a name starting with an underscore (e.g., _AGE). Variables act as placeholders for the actual value of the related attributes. All the appearances of a variable in the same diagram take the same value. For example, this can be used to indicate that several instances of person are the same age.
A SADAS uses observations from sensors as inputs to describe its environment using the previous concepts. It categorizes surrounding objects and assigns attribute values to them. For instance, a person walking alone with a speed below the average (i.e.,
fastness low) may suggest an elderly person (i.e.,
age elderly) or somebody with mobility impairments [
26]. The latter information is not actually observed, but derived using social knowledge
3.2. Traffic Social Properties
Traffic social properties describe prototypical social contexts or processes over them. For instance, on the behavior of pedestrians in groups [
8], passengers in vehicles [
10], or AT contradictions (see
Section 2.2). They follow the template for general social properties [
12] but using the SADAS-ML.
Figure 6 shows an example of property. It considers that people moving together for a certain time probably belong to some kind of group [
27]. The diagram uses type instances to consider actual data available in the SADAS.
The diagram shows two instances of person (i.e., the person1 and person2) that are the input of the proximity group1 transformation. These instances have tracks with several positions. The diagram uses variables to indicate which positions are simultaneous. For instance, position1a and position2a happen at the same time, as they have the same value for the attribute timestamp (the shared variable _TIME1). The near relationship indicates that the linked positions are close in the space. The fact that _TIME1 and _TIME2 must be different but close in time cannot be graphically indicated. The snippet of the transformation can be used to specify it.
When the available information meets the previous constraints, the transformation creates an instance of the group1 group type that includes as participants the two instances of person. The instance of the bond type tag type highlights that the group is derived from the observation of the proximity in movements. This also leads to a low value for the certainty attribute of group1.
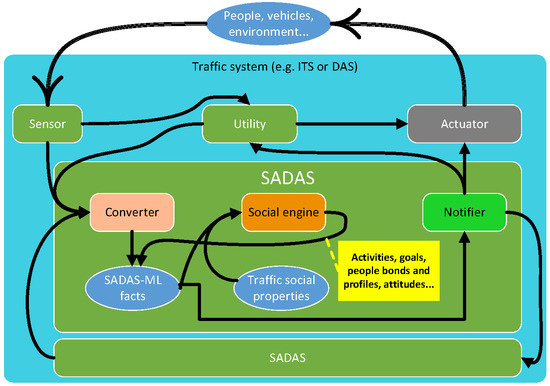
3.3. Architecture
The SADAS architecture includes components to manage social information as specifications compliant with the SADAS-ML (see
Section 3.2), and to integrate those components with others of traffic systems. The information processing follows an agent-based architecture for knowledge-based systems using external resources called MASSA [
28]. It decouples the pipeline to preprocess information from the knowledge-oriented components. To facilitate reasoning, a SADAS uses a shared representation of the context in a
social engine. Agents can consult and modify it using resources that implement the observer pattern. This follows common practices in context-aware systems, particularly the FAERIE component architecture [
14].
Figure 7 shows the main components of the architecture. It uses concepts of the ITSML such as agent, utility, or sensor (see
Section 2.1). The components
ASensor and
AComponent represent elements from the traffic system where the SADAS is integrated. The other components are specific to this study and work internally with SADAS-ML specifications.
There are three types of agent. Sensing managers get observations from the traffic system external to the SADAS. Reasoner managers manipulate the SADAS-ML information. Observer managers communicate the relevant information to the external system. These agents use several support utilities in these tasks.
The utility converter of sensing managers acts as an observer for the external components. These external components can be, for instance, sensors and other SADASs. The perceive method captures the events produced by those components and notifies them to the relevant components.
The social engine utility of reasoner managers implements a rule-based engine. Its Knowledge Base (KB) contains facts and traffic social properties. The engine provides two methods. The assert method allows new facts to be introduced in its KB. The consult method supports queries to the KB.
The notifier utility of observer managers supports the communication of social information to external components. It implements the notify method to be reported on changes in the KB. This utility also implements the observed element of the observer pattern. In this way, external components can use it to be notified on changes in the KB. The consult method supports external queries to the KB.
The workflow is as follows considering only utilities. When there is an external event, the converter is notified about it. It translates that external event into facts as SADAS-ML data instances and inserts them into the KB. When it has finished inserting new information, it triggers the engine reasoning to derive information and check properties. When this process ends, the engine notifies that to the utility notifier. The notifier uses the engine method consult to read the KB and gets the relevant information as SADAS-ML facts. It translates these facts into suitable formats for the rest of the traffic system. Then, the notifier changes its state, and the external components (e.g., actuators and other SADASs) acting as observers get notified on it.
When the previous process requires complex reasoning (e.g., translations using ontologies or requests among agents with speech acts), manager agents are introduced in the workflow. In that case, communications between utilities are mediated by their managers, so these can perform their tasks.
This design enables flexible management of social information. It isolates knowledge-related components in the SADAS, while components that participate in observer patterns (i.e., converters and notifiers) provide the interface with the rest of the traffic system. These same components and their managers carry out the translations among the external information and SADAS-ML specifications. The translation-related components can be reused among different SADASs, as they are tailored to specific targets (e.g., certain types of sensors). Inside the SADAS, the rule-based approach of the social engine and the reasoner manager facilitates modifying the used knowledge just changing the included traffic social properties.
4. Experimentation
This section illustrates the application of the previous framework (see
Section 3). It includes a case study (see
Section 4.1), and the discussion on it and additional experimentation (see
Section 4.2).
4.1. Case Study: Intelligent Traffic Signals with Social-Awareness
The case study considers a commercial area with shared spaces. There, several systems act together to make traffic flows safe and fluid using different signaling systems. The introduction of a SADAS is intended to use social information in this context. It will help to better describe the environment and profile people according to their characteristics, means of transport, and activities. In turn, this will be used to adjust traffic signal behavior and send tailored warnings to cars.
The traffic systems in the area are two presented in literature. First, there is an adaptive control of traffic signals [
15]. It is a hierarchical system that makes decisions at several levels: the area, intersections, and specific crosswalks. This control relies on several sensors to monitor the surrounding traffic, including cameras and inductive loops. The second system is a distributed DAS for the detection and tracking of pedestrians using car cameras in Vehicle Ad-hoc NETworks (VANETs) [
16]. The system supports cars to exchange information about their detections to reduce problems such as pedestrian occlusion. In both cases, the analysis of images from cameras enables extracting of different characteristics of traffic and their participants, e.g., pedestrian location, type of vehicle, obstacle speed, person age and gender [
17,
18]. The reliability of this information varies according to capture conditions.
The next sections discuss the previous aspects.
Section 4.1.1 focuses on properties to characterize people and the environment in this problem, and
Section 4.1.2 on properties that use the social information to make decisions on traffic control.
Section 4.1.3 discusses some specific aspects of the architecture of this SADAS. Finally,
Section 4.1.4 provides some examples of how the SADAS uses the previous elements.
4.1.1. Context Characterization
The SADAS works here with social information about four main groups of elements: the area, which is a commercial one; the used vehicles; people’ characteristics and activities; and companion. These groups of information are considered mutually interacting rather than isolated. Next, some examples of traffic social properties for these groups are introduced.
The type of area and its facilities are known to change some people’ attitudes (see for instance [
29,
30]). For example, people walking in a leisure area (e.g., a park, cultural facilities, or commercial area) are more likely to wander slowly around. There are also areas where vehicle drivers must be particularly aware of vulnerable pedestrians, such as children near a park or school, people with limitations close to a hospital, or distracted people in leisure areas.
Figure 8 considers this with a traffic social property that identifies some of these areas of particular concern.
The warning area from activity transformation looks for areas tagged with instances of the activity tag type. These indicate specific uses, in this case “commercial”. When one is found, an instance of information of the warning area type is created and attached to the area. This instance could contain information to operate in that area, e.g., maximum speed or types of vehicle allowed. The use of the variable _ID indicates that the two instances of area are the same, as they have the same identifier. This allows modifications of instances to be specified.
The type of vehicle used also implies differences in traffic behavior (e.g., for pedestrians [
8], cars [
10], bicycles [
9] and scooters [
31]). Vehicles have different characteristics (e.g., maneuverability, maximum speed, applicable norms, and allowed lanes). They are also used in different ways (e.g., scooters driven by children or adults), frequently depending on the purpose (e.g., a leisure walk or last-mile travel). One way to draw some expectations about this purpose is using the area activity. For instance, in leisure places (e.g., cultural and commercial areas), people using personal mobility solutions (e.g., bicycles and scooters) are more likely to be taking a leisurely walk than moving in transit to some place. For this last purpose, these areas are not the best option, as they are usually crowded.
Figure 9 depicts a traffic social property that considers this knowledge.
The transformation
personal mobility solutions in area considers
scooters, which are a sub-type of
vehicle. When they are moving in a leisure area (here a commercial one), the purpose of their drivers is drawn as leisure. The
current position of the scooter is extracted from its track (i.e., the
ATrack). The variable
_now is a special one in the SADAS-ML that means the actual moment. The commercial area is characterized using tags (as in
Figure 8). The presence of the scooter in it is represented using the
near relationship. The pleasant goal of the travel activity affects the way of moving described in the resulting
ATrack for the scooter. It has a
low fastness related to its wandering nature, though keeping a
high maneuverability (i.e., the probability of sharp changes in direction) related to the inherent characteristics of the type of vehicle. This last characteristic is part of the definition of the scooter type.
The previous transformation derives information for the track. It indicates that with the value derived in the generation attribute. The certainty about this derivation is medium.
People’s individual characteristics and activities also affect their behaviors in relation to traffic. For instance, young drivers are more prone to risky behavior and elderly ones with limited capabilities to suffer accidents [
31], and the gender and the moment of the week establish different preferred places to go [
30]. This knowledge can be used to extract information on expected behaviors, characteristics, or state.
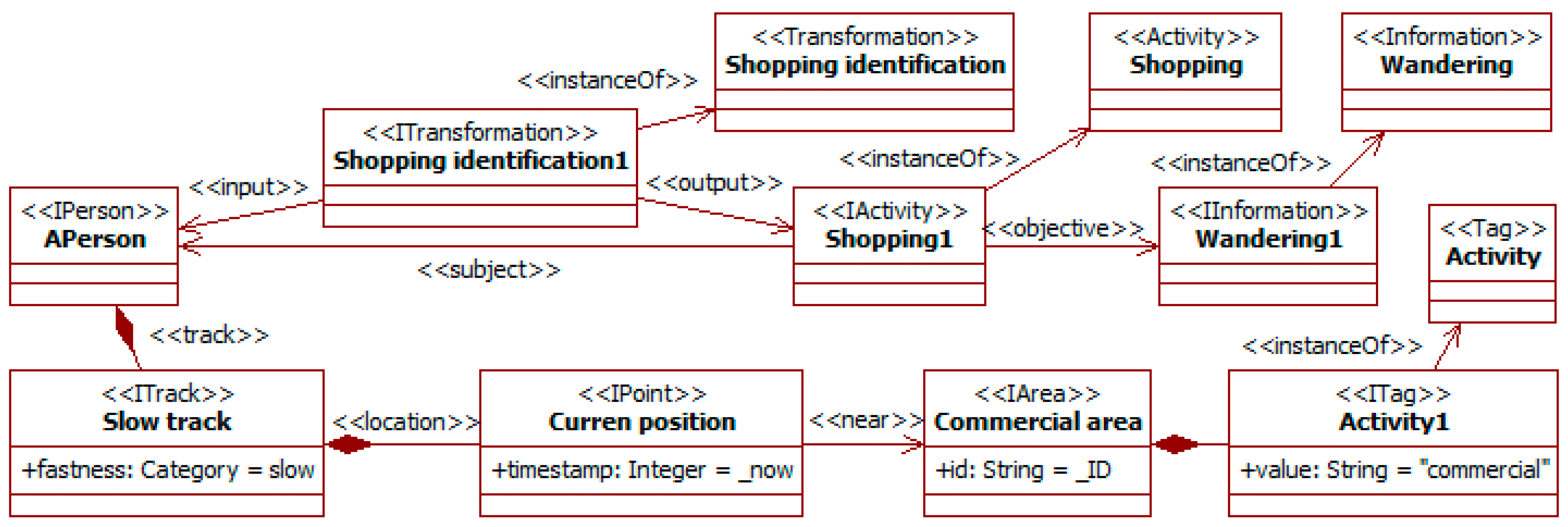
Figure 10 illustrates this possibility with a traffic social property that makes a guess on the kind of activity a pedestrian is engaged in from her/his observed movement.
The transformation shopping identification considers a pedestrian APerson moving slowly in a commercial area. From this information, it derives that the subject is probably performing an activity of type shopping with the only objective of wandering. Certainty attributes are omitted in the figure.
The last group of social information considered is related to social bonds among participants. Companion affects perception and behavior in traffic. For instance, passengers usually reduce accident risk, but less so for young drivers [
10]. This kind of traffic social property can also be considered.
Figure 11 shows that the movement of a person can be changed by the companion, here that of children by the presence of adults, and
Figure 12 that companion can alter the attention level to traffic.
The transformation
family movement takes as input an already identified group with a
child and the
parent (i.e., really an accompanying adult). This can be the result of a previous property (see
Figure 6) and feature extraction from images. In this situation, children usually have quieter movements than when they are alone, as there are adults surveying them. This is represented by modifying the
child track with a low value for the attributes
fastness and
maneuverability.
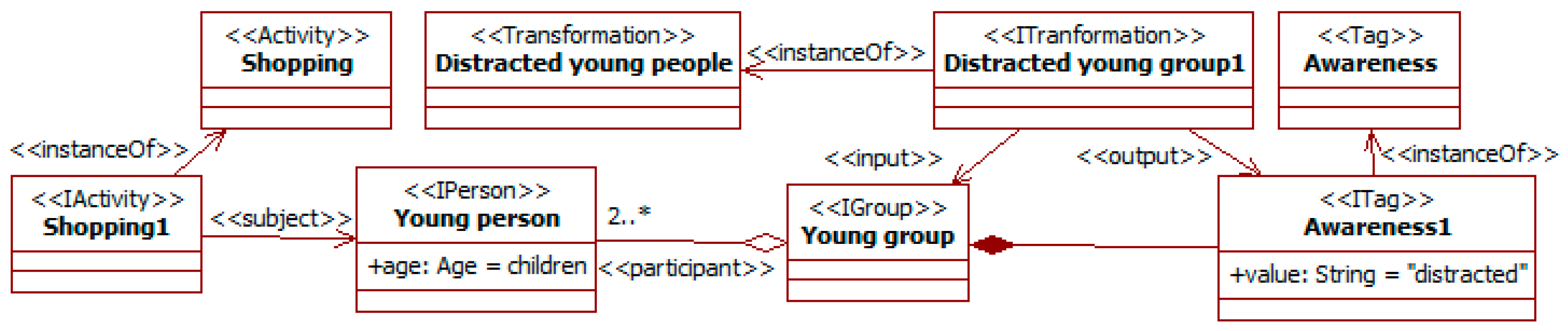
The transformation distracted young group considers that groups of young people involved in a leisure activity (here shopping) probably pay reduced attention to the surrounding traffic. This awareness is characterized with the specific tag for this aspect attached to the group.
The previous traffic social properties are used to derive information about the environment and the expected behavior of participants. The SADAS uses this to assist users and get a safer and more fluid traffic.
4.1.2. Traffic Decisions
The characteristics of people and the environment influence how traffic systems act, and social information contributes to this characterization. The SADAS helps here to consider it in the original systems. The next properties illustrate this point.
Social information can be used to choose when to activate the safety measures in the car detection system of [
16]. Some of the previous properties are related to the attention level of pedestrians (see
Figure 12). Moreover, the growing presence of silent vehicles (e.g., bicycles and electric cars and scooters) increases the probability of their reaching pedestrians’ positions unnoticed [
32].
Figure 13 considers this kind of situation.
The
raise sound alert transformation looks for vehicles (i.e., the
AVehicle instance) close to pedestrian groups with potentially low levels of attention (i.e., the
AGroup instance). This level of attention is characterized with the tag of type
awareness (as in
Figure 12). The fact that the vehicle and the group are close is described using the
near relationship with the current positions of the vehicle and some group participant. The suggestion of activating the sound alert is characterized as another tag of type
sound warning linked to the vehicle.
The social information can also be used in the ITS that controls traffic lights [
15]. For instance, to accommodate the duration of those lights to the presence of pedestrian groups. A group involved in a wandering activity (e.g., shopping or visiting a place) is likely to become dispersed. When such a group arrives at the traffic lights, some of their members may cross while others wait. This situation frequently causes some pedestrians to walk when their light is red. This danger can be reduced if all the group members remain on the same side of the road. To do that, the duration of the red light can be increased to force regrouping.
Figure 14 works on this situation.
It considers a group (i.e., the
AGroup instance) performing a wandering activity (i.e., the
AnActivty instance) with an objective
wandering (as in
Figure 10). This group could also be characterized using a tag
awareness (as in
Figure 12). The fact that this group is dispersed is described from the positions of its members (i.e., the
APerson1 and
APerson2 instances). At least two members have positions separated by a distance over a certain threshold. This condition is part of the snippet of the transformation
wait group1. Simultaneously, some members of the group (here
APerson2) have reached the position of the traffic lights (i.e., the
ASignal instance). This is characterized with the
near relationship. When available information meets these conditions, the transformation increases the time for the red light (i.e., the attribute
time_red).
4.1.3. Architecture
The architecture of this SADAS is very close to the generic one (see
Section 3.3). There are two groups of components: those from the original systems [
15,
16]; and those of the SADAS. As in
Section 3.3, the component types of the architecture come from the ITSML (see
Section 2.1).
The original components are represented by sensors, actuators and utilities. Managers are not included, as agents are more complex components and they are not required in these traffic systems. The only common requirement for the considered components is that they offer a public interface with consult methods. If they produce notifications, they must implement the observed component of the observer pattern. Components whose behavior the SADAS changes must also provide modify methods. In most cases, information for the SADAS comes from utilities that perform some processing of the raw data, such as feature extraction from images.
The car detection system [
16] can provide information on obstacle detection on elements such as cars and pedestrians, and thus about their positions over time. The control system for traffic signals [
15] includes cameras that contribute to this tracking. It also provides the position of its signals and crosswalks. Information about areas can be extracted from publicly available sources, such as open data initiatives from city governments.
The SADAS just includes the original components of its architecture (see
Figure 7). Agents are not required here, as there are not complex processes beyond the utilities. Specific converters and notifiers are required to communicate with the original components (those for the systems in [
15,
16]). The rest of the SADAS components are the general ones and do not need to be modified. Only the contents in the KB of the social engine change to be adapted to the current context. Nevertheless, parts of these contents can be reused from other systems (e.g., some properties, facts, and information types), as they are independent of specific external devices and utilities, and applicable to multiple social contexts.
The previous information allows more precise expectations on people’s behavior and movements to be derived than in the original systems. For instance, considering the probable influence of companion or the characteristics of people and vehicles. Attributes such as the expected maneuverability and fastness of an obstacle can help to determine a safety area around it with the potential next positions. It can also help to identify the most suitable warning mechanisms in a situation from people’s awareness and capabilities. The social information can also be an aspect to consider adjusting traffic flows. For instance, the times of traffic lights can be dynamically adapted to the presence of groups or people with mobility issues.
4.1.4. Functioning
An example of typical workflow of this SADA might be the adaptation of traffic lights and alarms to a group of friends doing shopping. It starts with information from the original DAS [
15] and ITS [
16], goes to the SADAS that derives new information, and sends part of this back to the actuators in the original systems.
Initially, some ITS utilities can consult (or be initialized with) information about the area. SADAS notifiers receive this information and assert it as
area instances with the
activity tag with value “commercial” (as in
Figure 8).
When the traffic systems are working, their cameras detect persons and vehicles, and start tracking them. Notifiers again receive this information. They respectively assert it as
person and
vehicle instances with their related
track instances (as in
Figure 6). This tracking continues over time, adding to those tracks new locations as
point instances.
For the group of friends, the previous points are close over a period. When the reasoning cycle of the social engine starts with this information, the property about social bonds (see
Figure 6) becomes executable. The pattern-matching algorithm finds that the inputs of the transformations are available and meet the constraints. Thus, the engine triggers the
proximity group transformation and generates the
group instance among the previous
person instances.
The information about the area and the people’s tracks also allows the property about activities to be triggered (see
Figure 10). The
track instances of friends indicate a slow movement, i.e., with
low fastness. At the same time, their locations are close to the area (in fact inside). This is asserted by a transformation that compares positions in its snippet. From this information, the property derives that these
person instances are engaged in a
shopping activity with a
wandering objective. In turn, this information with a group of youngsters would cause the property about the attention level (see
Figure 12) to derive that the group of friends is probably moving in a distracted way. This last information corresponds to an instance of the
awareness tag type.
When the positions of one of these friends and a vehicle become close, the DAS should trigger a suitable alarm. The property on sound alarms does it (see
Figure 13). The reasoning on positions is similar to the one for the previous group property. The group of the person also has an instance of the
awareness tag with the
distracted value attached. Thus, the inputs of the property transformation are available, and it generates the outputs. Here, the output is a tag of the
sound warning type attached to the vehicle. This information is sent to a SADAS converter that is observed by external components. Thus, its state change triggers the sound alarm of an external observing actuator in the DAS.
The previous information can also change the duration of traffic lights in the ITS. In this case, the property (see
Figure 14) requires that the positions of some group members are not close, and some of them are close to the crosswalk with the lights. The information on people’ positions could come from the cameras in the ITS or the DAS. In this last case, integration could be achieved through the direct exchange of information between the SADAS in both systems, as far as suitable converters and notifiers were configured for it. The previous information makes the property executable, and its triggering modifies the lights’ duration.
4.2. Discussion
The SADAS framework has been tested in several experiments. These considered different problem domains and research studies. Regarding the ML, they assessed its suitability to describe different types of participants, vehicles, and traffic systems, as well as transformations of this information. To evaluate the impact of using this information in traffic systems, experiments carried out simulations using the framework for ITS (see
Section 2.1) as basis. This enabled it to be validated that SADASs could be included in those traffic systems, and that social information changed their behavior and actually improved traffic. This section discusses the main findings of these experiments.
Regarding the modelling of participants, experiments have focused on profiles according to literature. These included differences regarding age [
26,
33,
34], gender [
26,
34], culture [
35], and socio-cultural level [
36]. In general, these studies offer statistical analyses of the relation between some profile characteristics and behaviors in traffic activities. These can be translated to the SADAS-ML using sub-types of the
person meta-type that include the required new attributes and their values. Their effect is modelled through processes, which use those characteristics as inputs to affect the values of other information.
In the case of studies that involve the actual decision-making of participants (e.g., [
29,
37,
38]), the SADAS-ML has some limitations. It allows modelling when an agent chooses an activity because it achieves some of its objectives. However, it does not include primitives to reason about those objectives (e.g., preferences, decomposition, suitability, or hard and soft goals). That kind of primitives has already been addressed in other studies. For instance, literature in the agent paradigm has paid attention to goal and means-ends modelling and analysis [
13]. Some of these primitives appear in the base languages of the SADAS-ML, i.e., the UML-AT and the ITSML (see
Section 2). However, these only address goal decomposition and positive and negative contributions to goals. Such primitives are not currently part of the SADAS-ML.
Different types of vehicle [
9,
31,
32,
39] can be modelled as sub-types with specific characteristics of the
vehicle meta-type. These vehicles can embark systems and people.
The main limitation found regarding the modelling of physical objects (e.g., people and other elements in the environment) has to do with their borders and movements. This is relevant for instance when dealing with collision detection. An approach similar to that for areas (i.e., defining their perimeter with points), could partially solve the problem of borders. Nevertheless, reasoning with physical models is not the goal of SADASs. The relevant information should be provided by external components related to those aspects. Regarding movement, the description of tracks as sequences of points causes a quick growth of data. A solution to reduce it may be by adding new points only when the trajectory changes its direction or speed.
The modelling of traffic systems has been studied with smart roads [
40], DASs [
41], and traffic control [
18,
42]. In most cases, SADASs only need to know the information these systems provide or use through standardized interfaces (i.e., implementations of the observer pattern). When there is a need to detail the components of these traffic systems, they can be included through sub-typing of the
object meta-type. The intelligent traffic signal is an example (see
Figure 3), with attributes and methods for sensors (e.g., camera) and actuators (e.g., lights). This supports a high-level perspective of traffic systems, which is well-suited for SADASs as they focus on social information.
Describing the evolution of systems over time also requires specific primitives. This aspect is currently addressed with the attributes
timestamp and
scheduling in the
element meta-type (see
Figure 1), and indirectly through the relationships produce-consume (i.e., output-input) of information in the
process meta-type (see
Figure 5). This makes frequent using the snippets to reason about this dimension with conditions on the timestamp attributes. Additional primitives for qualitative reasoning on time could help to alleviate this issue.
As happens in the case study (see
Section 4.1) and with time, numerical relationships among elements cannot be graphically represented in the SADAS-ML. Their specification resorts to snippets in arbitrary languages, where experts can use for instance their usual equations. Depending on their language, these snippets can be processed automatically (e.g., code). Even when this is not possible (e.g., free textual descriptions), these snippets are still useful to specify the system.
The experiments also enabled us to obtain an initial assessment of the impact of SADASs in traffic. They allowed information to be gathered on social aspects, and this changed the behavior of systems and participants in simulations. The results were similar to those reported in the case study. Regarding the impact of these changes in traffic flows, results were mixed. The considered social properties made systems very cautious with potential traffic problems (e.g., changes in obstacle trajectories). This was expected, as those properties were focused on safety issues. Though this reduced potential collisions, it also caused congestions in some flows and too many warnings on systems. Introducing some properties targeted to make flows more fluid and considering only collisions of high and medium probability could help to address these issues. The main conclusion is that the set of social properties must be carefully designed to get the desired balance between the different traffic aspects.
The final question raised from the experiments has to do with the need for guidelines to model and manage information. Beyond their description, there are no indications on how to choose when several concepts or relationships are possible (e.g., a mixed object as opposed to a physical object connected to intangible objects). It could also be difficult to design inheritance hierarchies for new needs, as choices entail tradeoffs that have impact on further extensions and the specification of traffic social properties. For instance, introducing new relationships to reason about time and decision-making. Choosing the right social properties for a SADAS is also challenging. Designers must consider the system requirements and problem tradeoffs. Experiments need to be crystallized in guidelines that help to understand the key aspects for decisions.
6. Conclusions
This paper has presented the SADAS framework for developing traffic systems (i.e., ITSs and DASs) that use social information. This information is related to characteristics of participants linked to their environment, activities and bonds, and their mutual influence. Considering this information allows extended models of traffic settings to be built, which results in better-informed decisions. Current traffic systems only partially consider this information, either at the macroscopic (e.g., to anticipate road load or conflicting points) or microscopic level (e.g., to measure response times or detect obstacles).
The paper includes an ML, an information management process, and an architecture. It is built on proven research in the areas of social information management [
12] and ITS development [
11].
The SADAS-ML offers an integrated conceptual basis to specify social information on traffic. It includes primitives to describe contexts and activities based on the AT [
23,
24] from Social Sciences. It can also specify traffic aspects including persons, vehicles, and their environment. The link between them allows traffic activities located in time, space, and social context to be described. The language also supports describing changes in information through processes (i.e., activities, transformations, and methods). These are specified with graphical primitives and snippets in arbitrary languages.
The language also provides extension mechanisms to tailor it. Among them are inheritance and instantiation of types in models.
This ML is used to describe the actual information of a system and prototypical knowledge applicable to it. The latter is specified as
traffic social properties, following the template for
social properties [
12] but using the SADAS-ML. This knowledge is the basis for reasoning about social information. Its modularization as independent properties enables its flexible management, as modifications only require changing the properties considered.
The architecture that supports the processing of social information is based on the principles of modularity and flexibility. The overall design follows the MAS organization in [
28]. It considers a pipeline of external tools. These provide information and methods for acting on the environment to the knowledge-based components. The interfaces with components outside a SADAS are isolated inside the converter and notifier components and follow an observer pattern [
59]. These components also perform the translations between the SADAS-ML and the formats of the external components. Agents are introduced to manage these components and reason on their information.
The knowledge management is implemented with a rule-based social engine. Properties play the role of rules to check and derive information. The engine implements a pattern-matching algorithm that looks for instances of a query (i.e., a SADAS-ML specifications) among the available information.
The SADAS framework has been tested in several experiments. The case study (see
Section 4.1) uses it to integrate two existing systems, an ITS to control the traffic lights in an area [
15] and an obstacle detection system for VANs [
16]. The proposed SADAS abstracts their information and uses its derivations to improve the planning of lights and the anticipation of potential movements of obstacles. The models allow most of its knowledge to be specified graphically, with only some conditions in process snippets. As stated before, modifications of this behavior mainly require changing the considered traffic social properties. Only when changes affect input data (e.g., from sensors) or acting outside the SADAS are new or modified interface components needed. Nevertheless, these interface components can be reused in projects. Similar findings appear in the other experiments reported, which consider other settings such as smart roads [
40] and people’s driving behavior [
37].
The approach still has several open issues, including some that already appeared in the paper. First, the SADAS-ML needs to include additional primitives. The experiments already required the introduction of new types (e.g., the information type wandering) and tagging (e.g., type of area). When these needs are recurrent, they point to potential new primitives. Another issue is the representation of decision-making. Currently, it appears as a produce-consume process on information, but there are no graphical ways to represent steps or preferences. For more complex processes, the specification must rely on snippets, which are less user-friendly for non-experts. Second, the use of the framework requires the development of guidelines for new users. Aspects such as choosing between alternative ways of modelling, or reviewing the knowledge basis, require training. Third, and following the previous points, additional tool support is required, in particular, to check the consistency of knowledge. This can be achieved with the available mechanisms through the introduction of meta-properties for validation. Finally, further experimentation is required. The framework has been tested with several existing studies, but there are still multiple traffic problems to check, such as rule breaking, incidents, autonomous vehicles, and highways. Moreover, some decisions already taken need further validation. For instance, the choice of enumeration types for some attributes and the possibilities of qualitative reasoning with them.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













