Multisensor Multi-Target Tracking Based on GM-PHD Using Out-Of-Sequence Measurements


Abstract
:1. Introduction
2. Problem Formulation
2.1. System Model
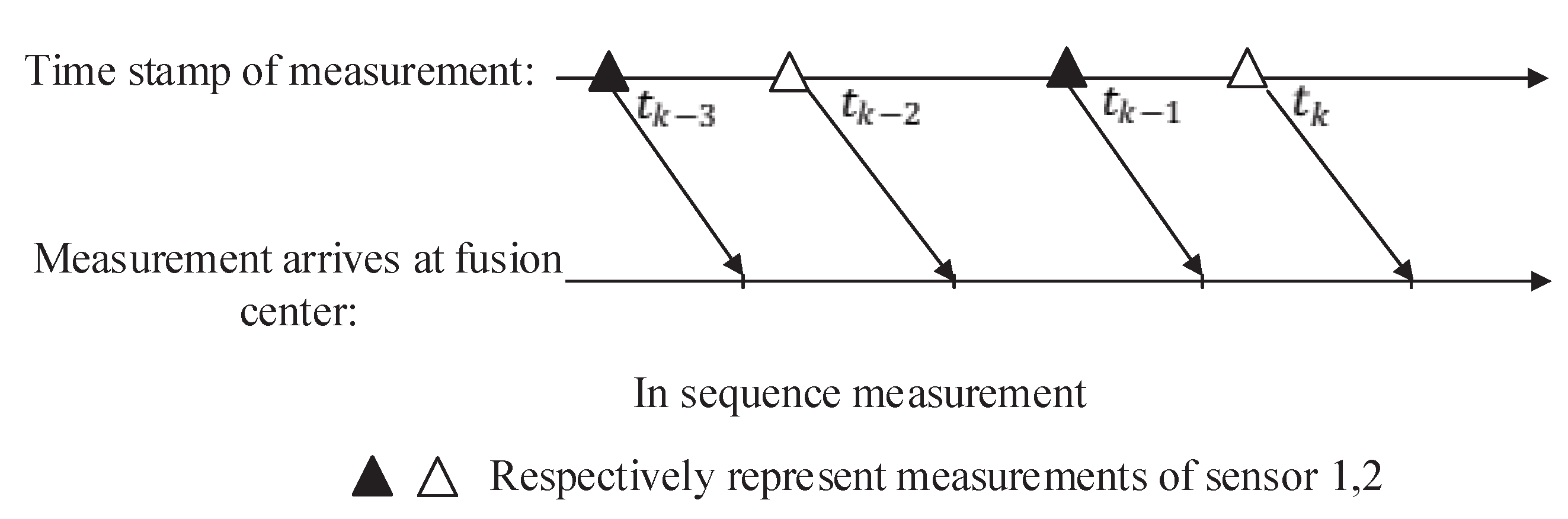
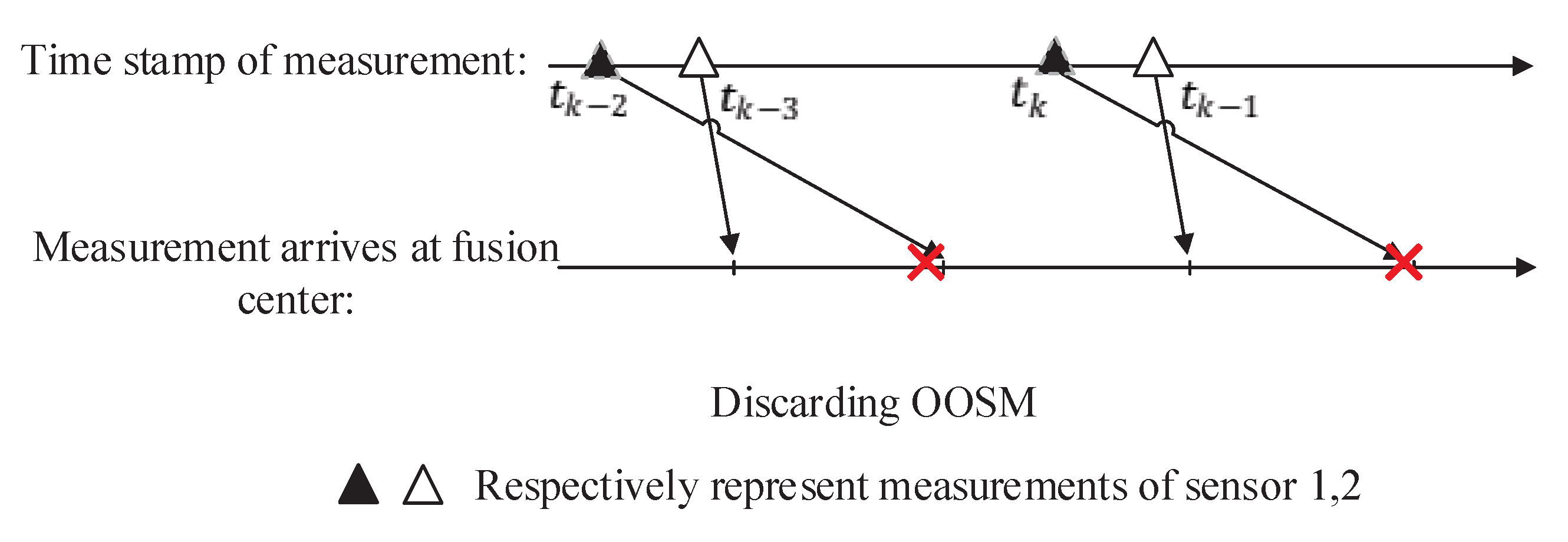
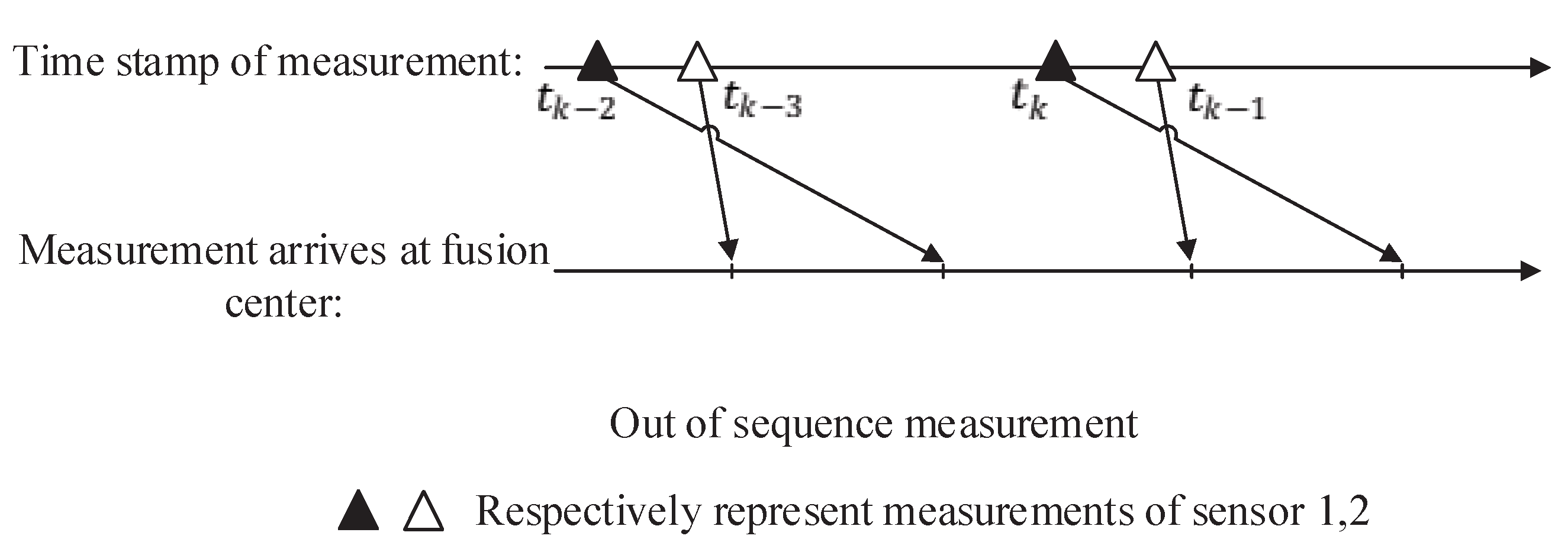
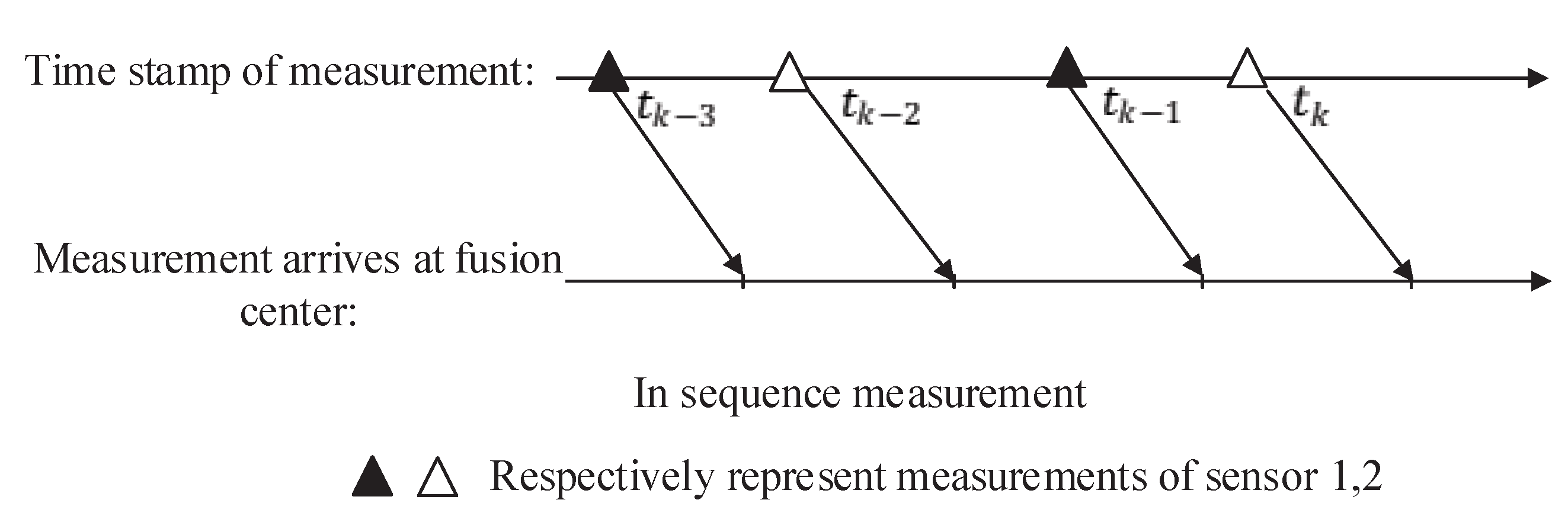
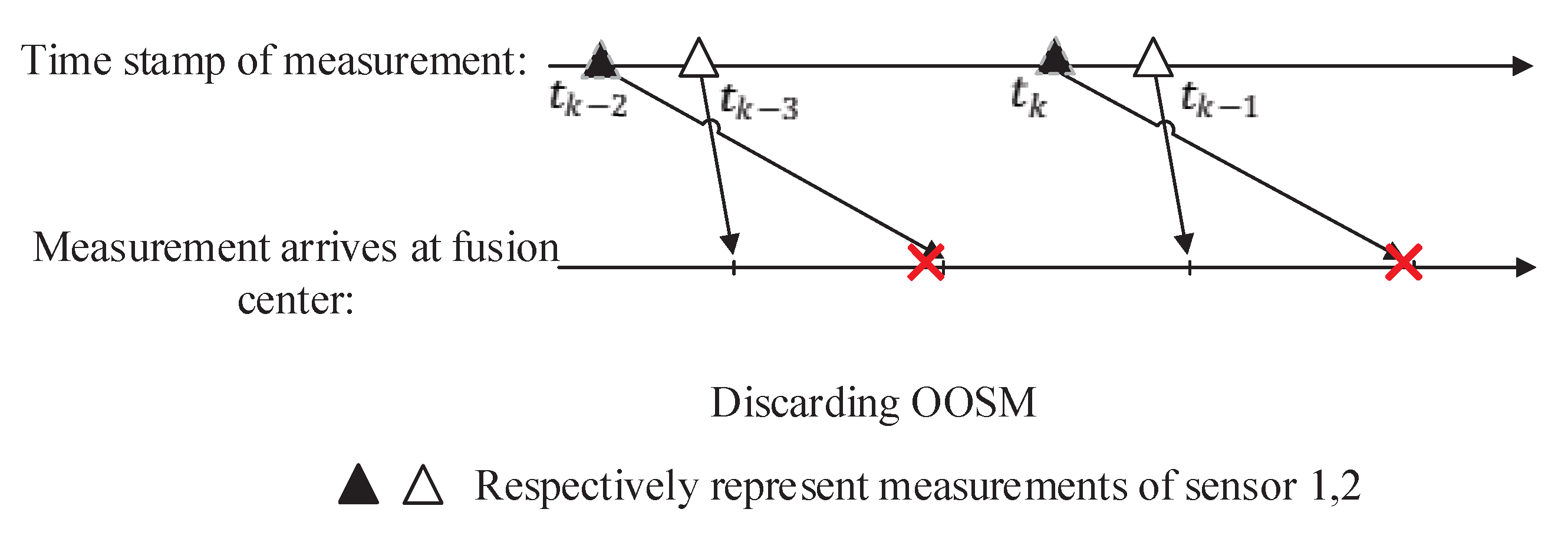
2.2. OOSM B1 One-Step-Lag Algorithm
2.3. GM-PHD Filter
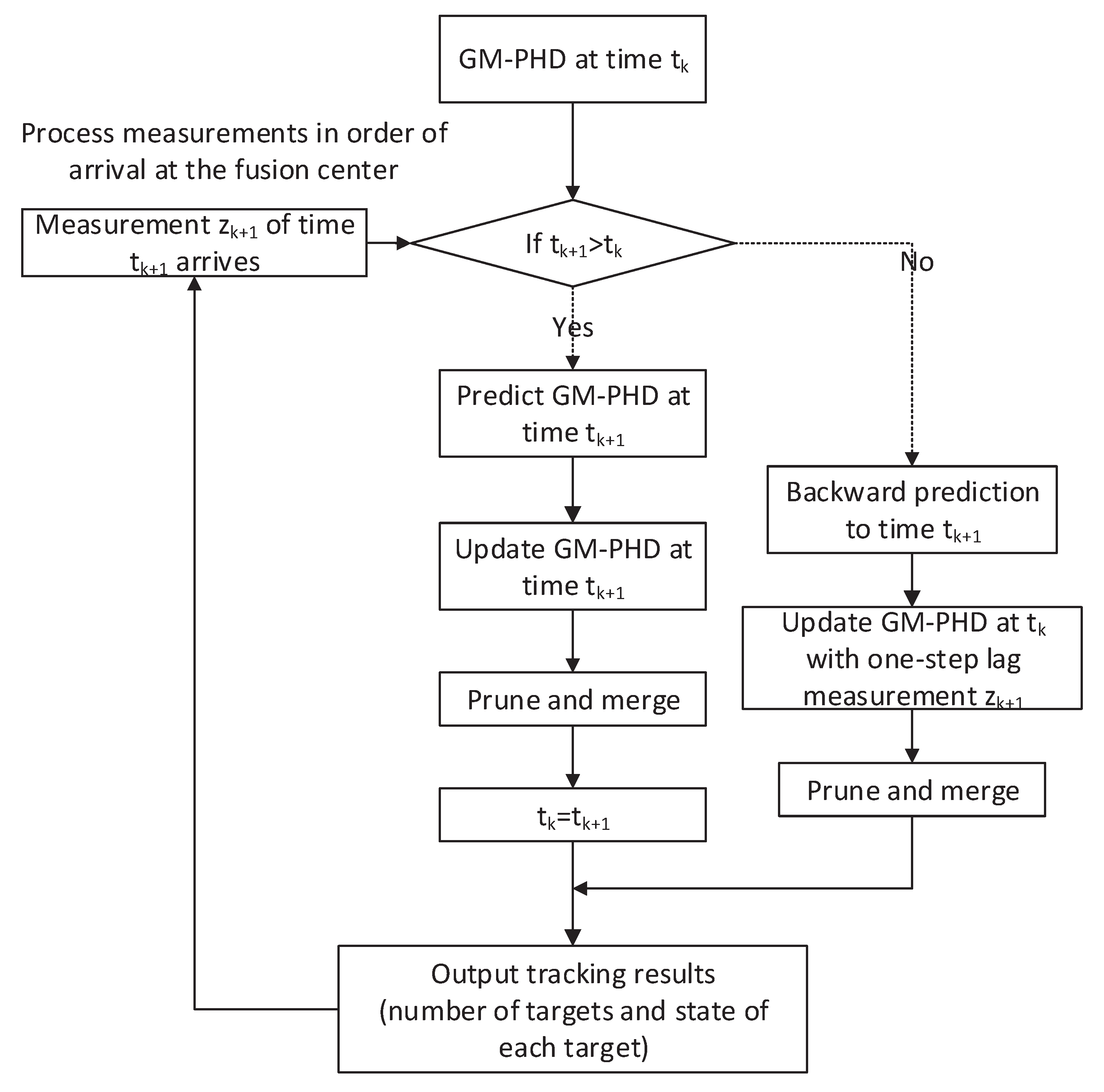
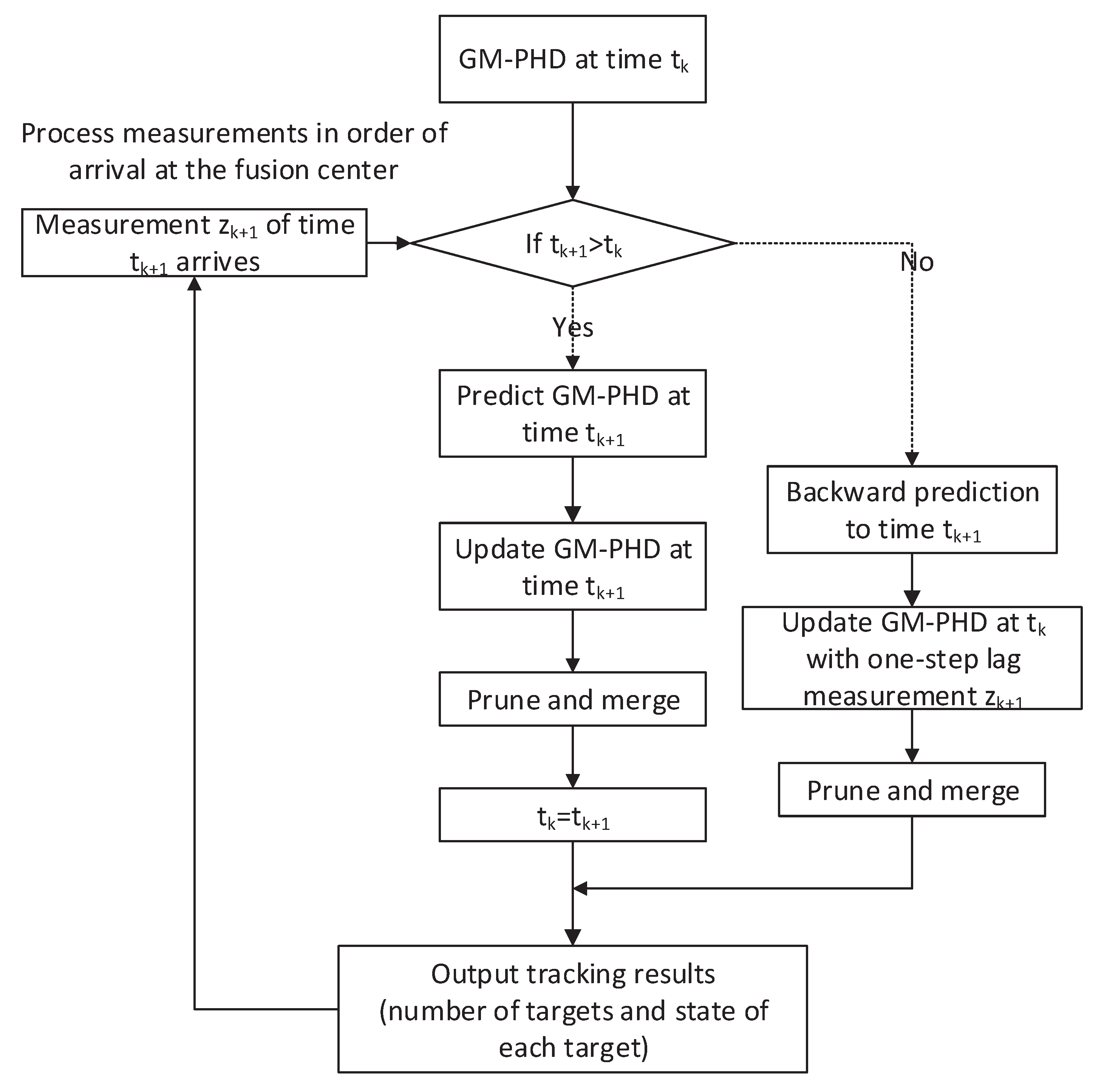
3. Multi-Target OOSM Tracking Algorithm
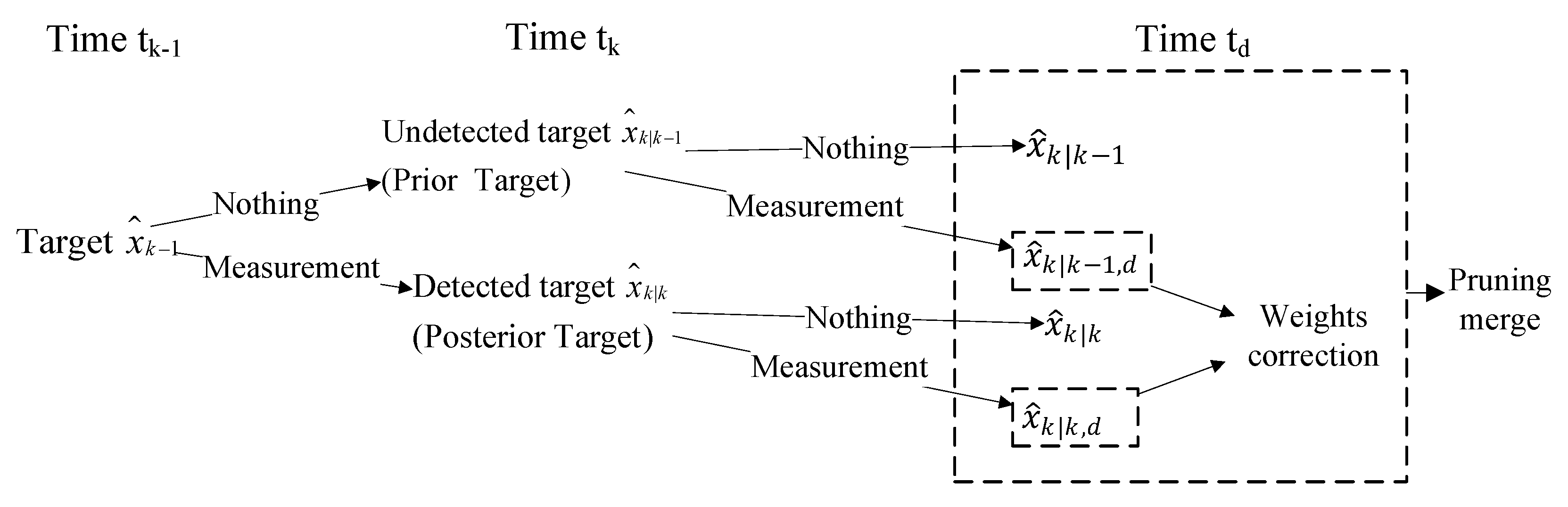
3.1. Backward State Prediction
| Algorithm 1 Backward state prediction |
|
3.2. Re-Update with OOSM
| Algorithm 2 Re-update using OOSM |
|
3.3. Weights Correction
| Algorithm 3 Weight correction |
|
| Algorithm 4 RFS-based multi-target tracking using OOSM |
|
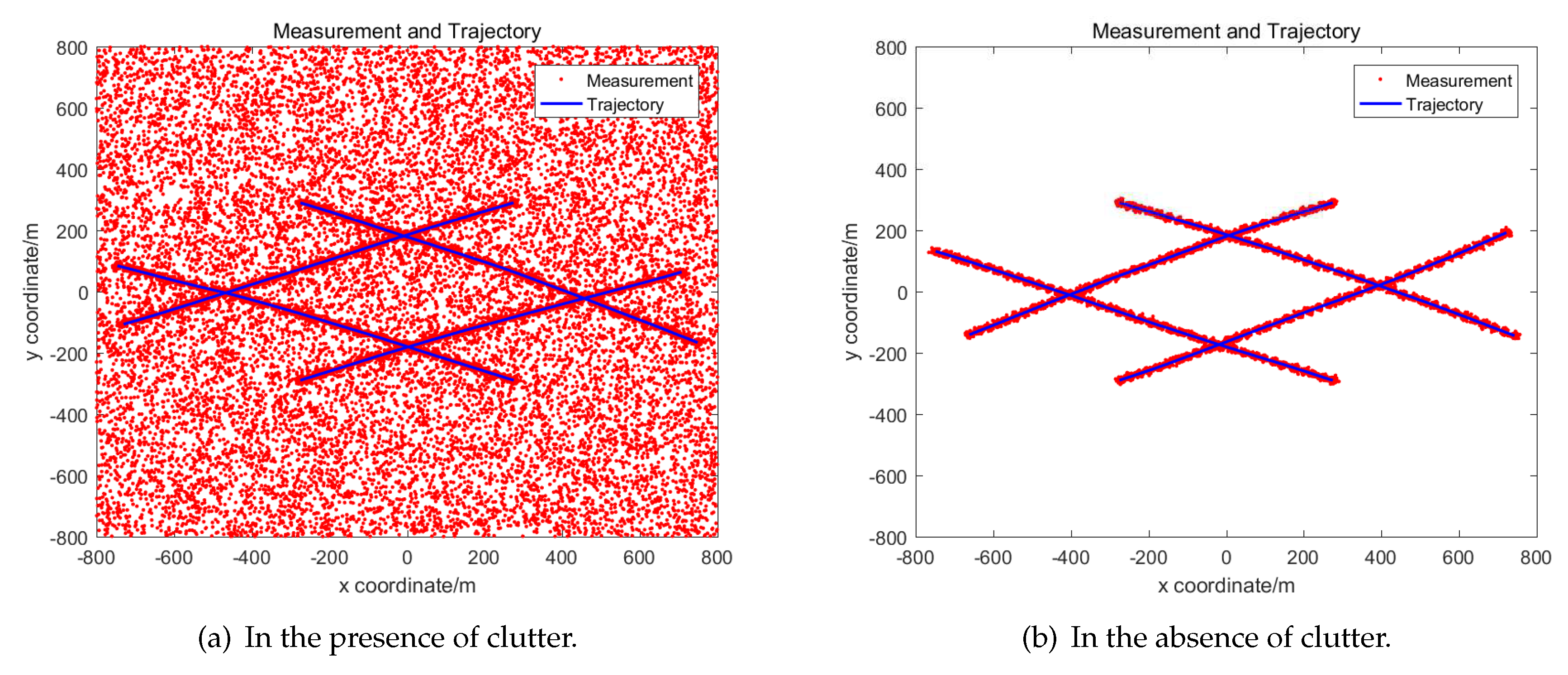
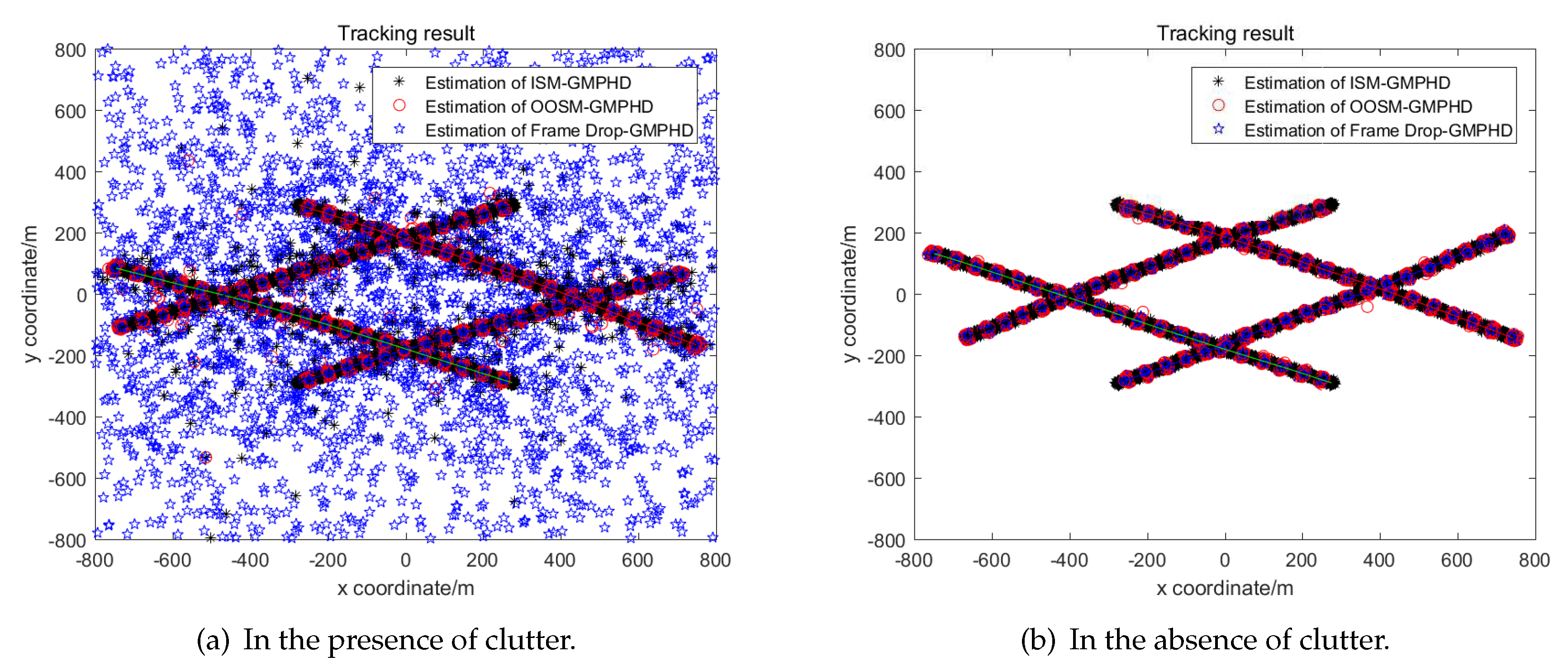
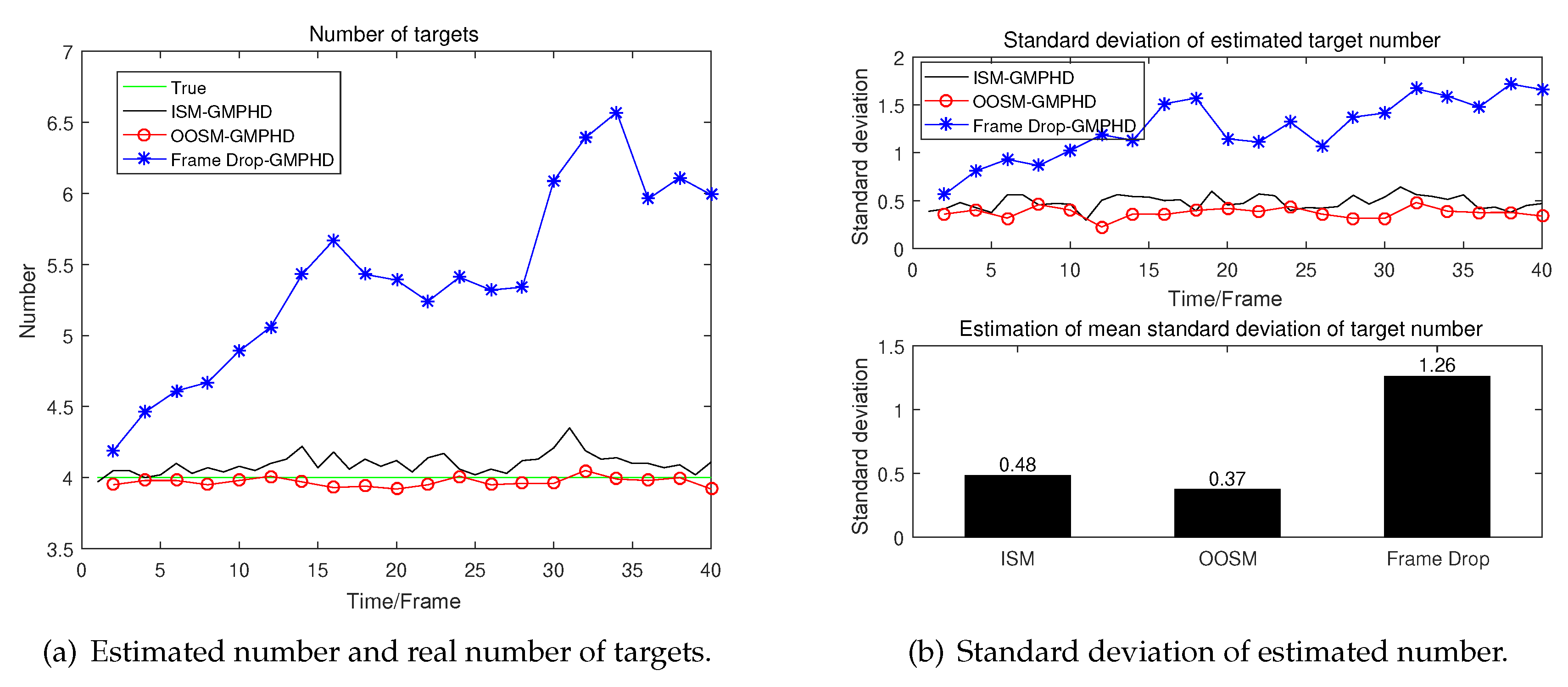
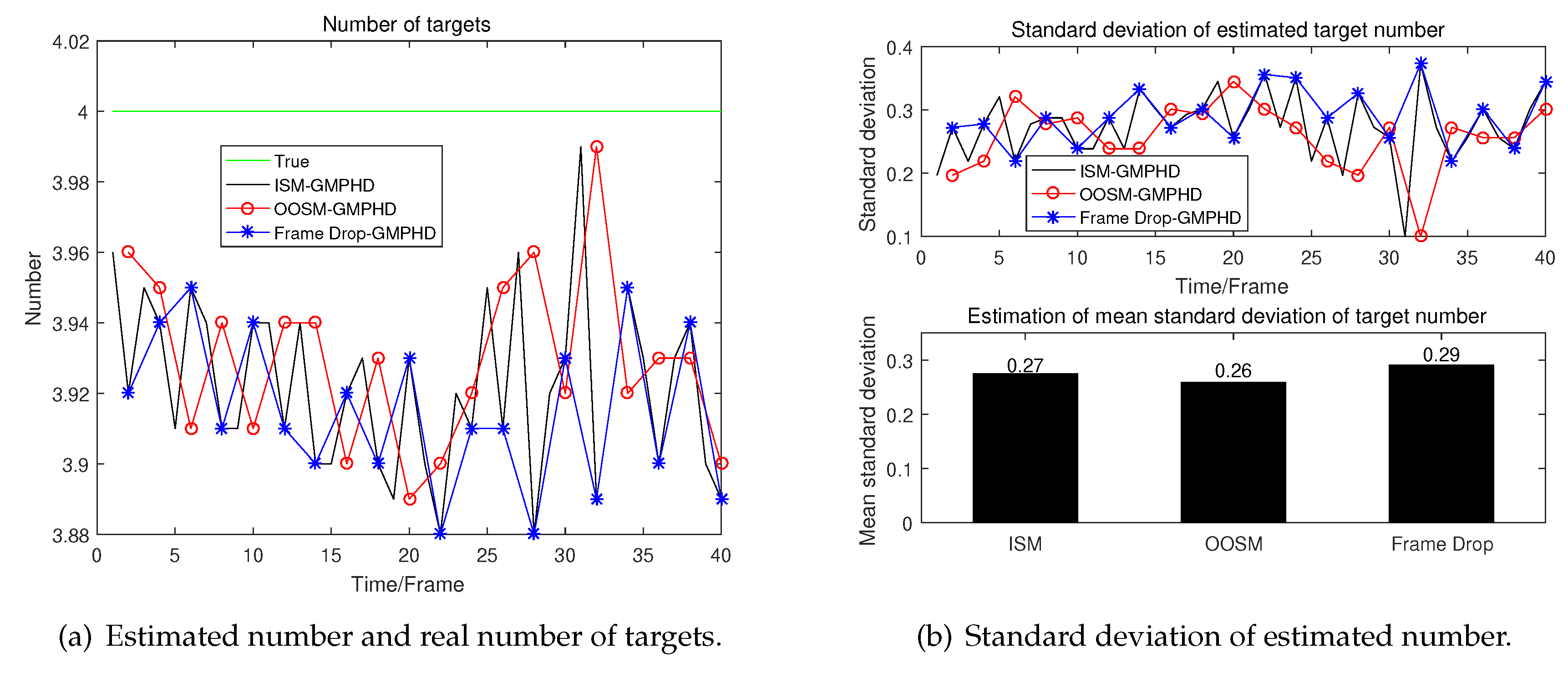
4. Simulations
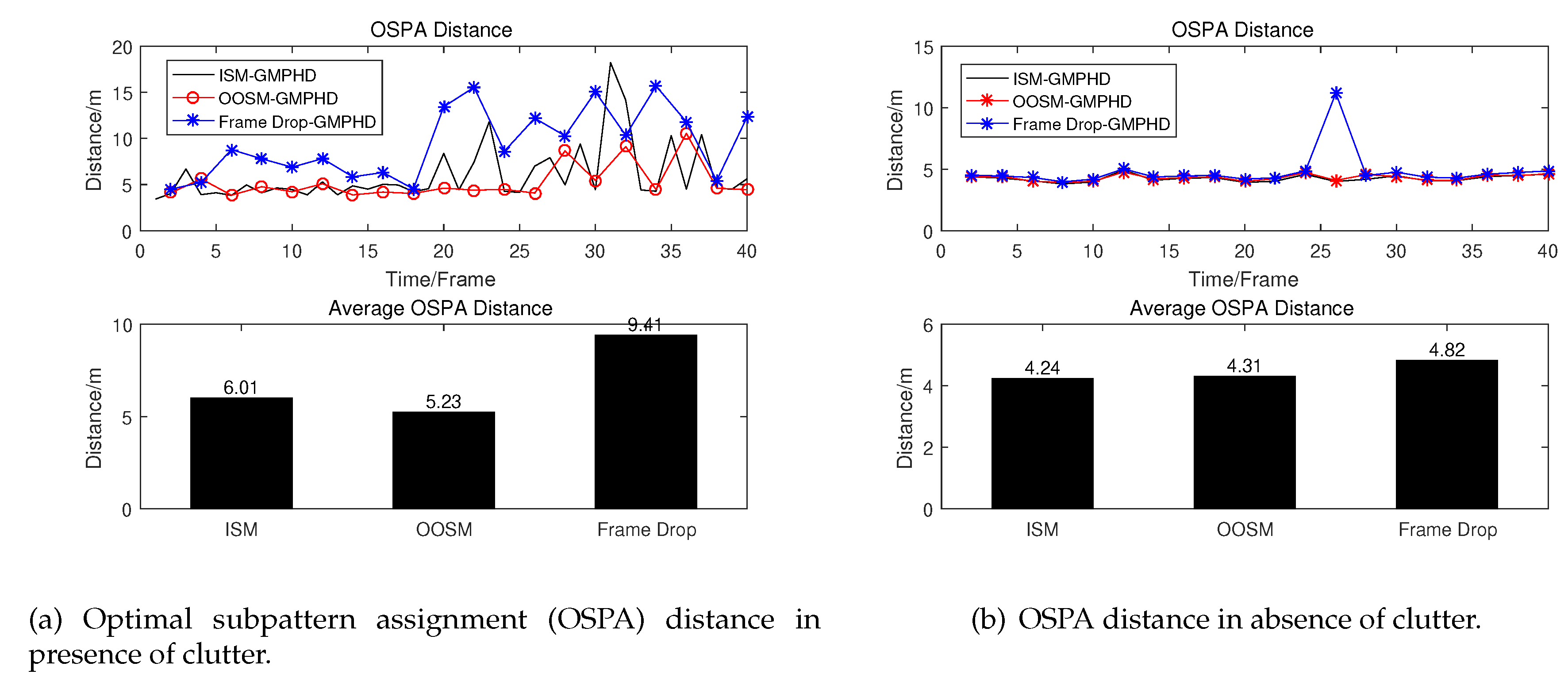
4.1. Distance
4.2. Compared Algorithm
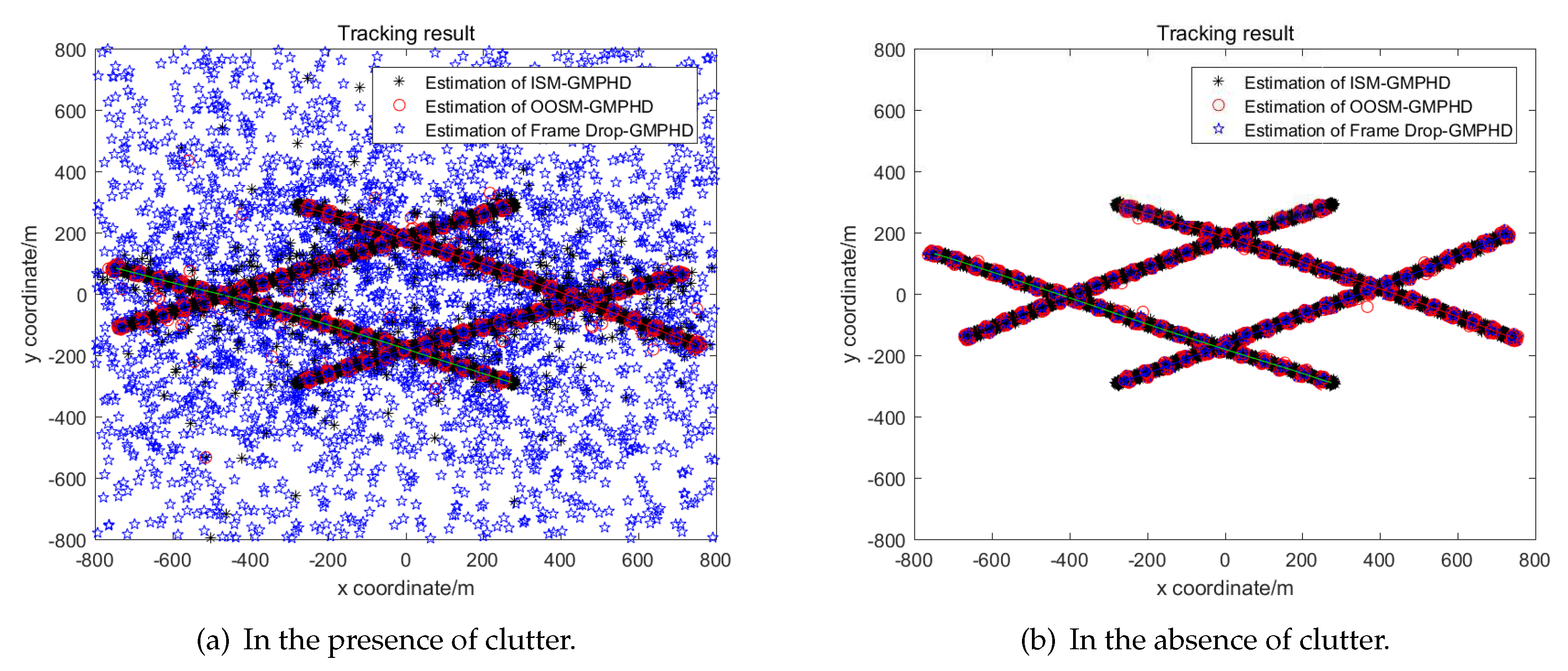
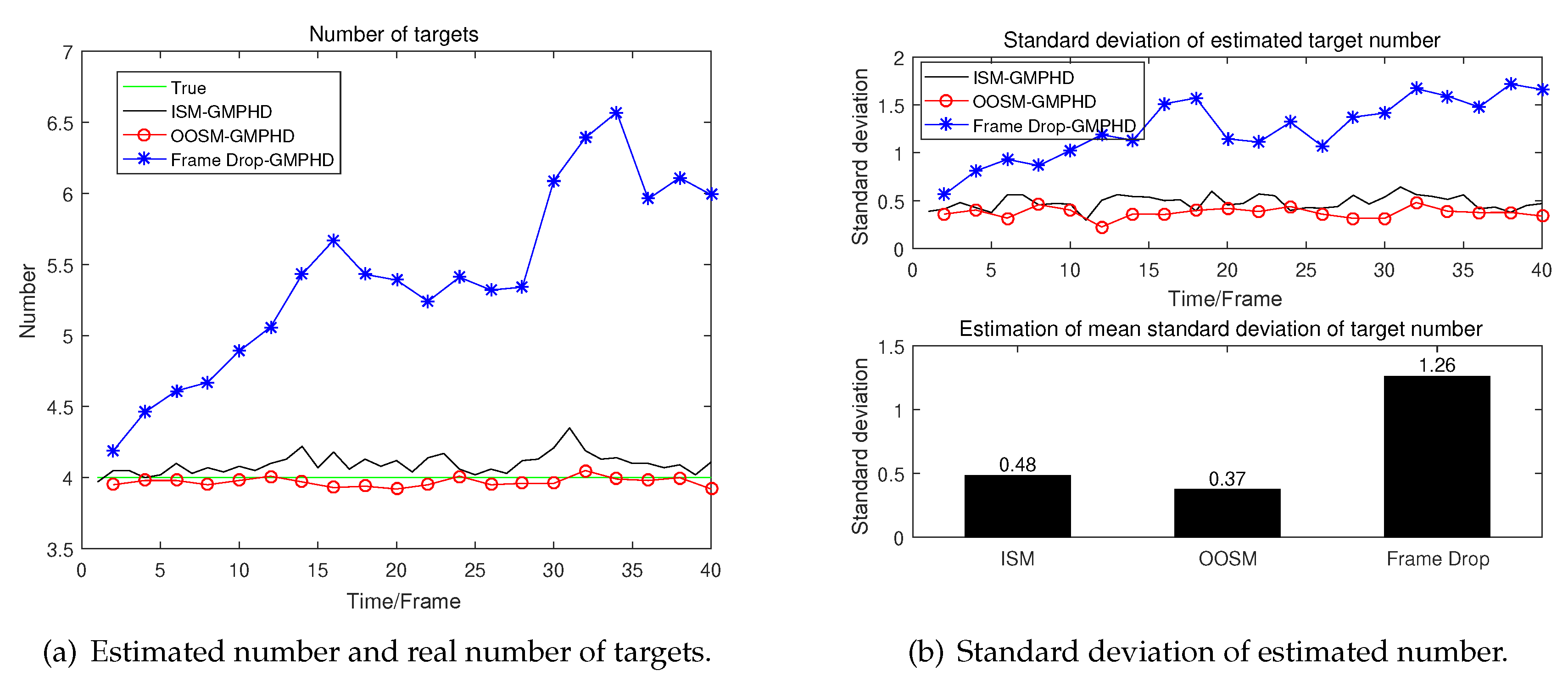
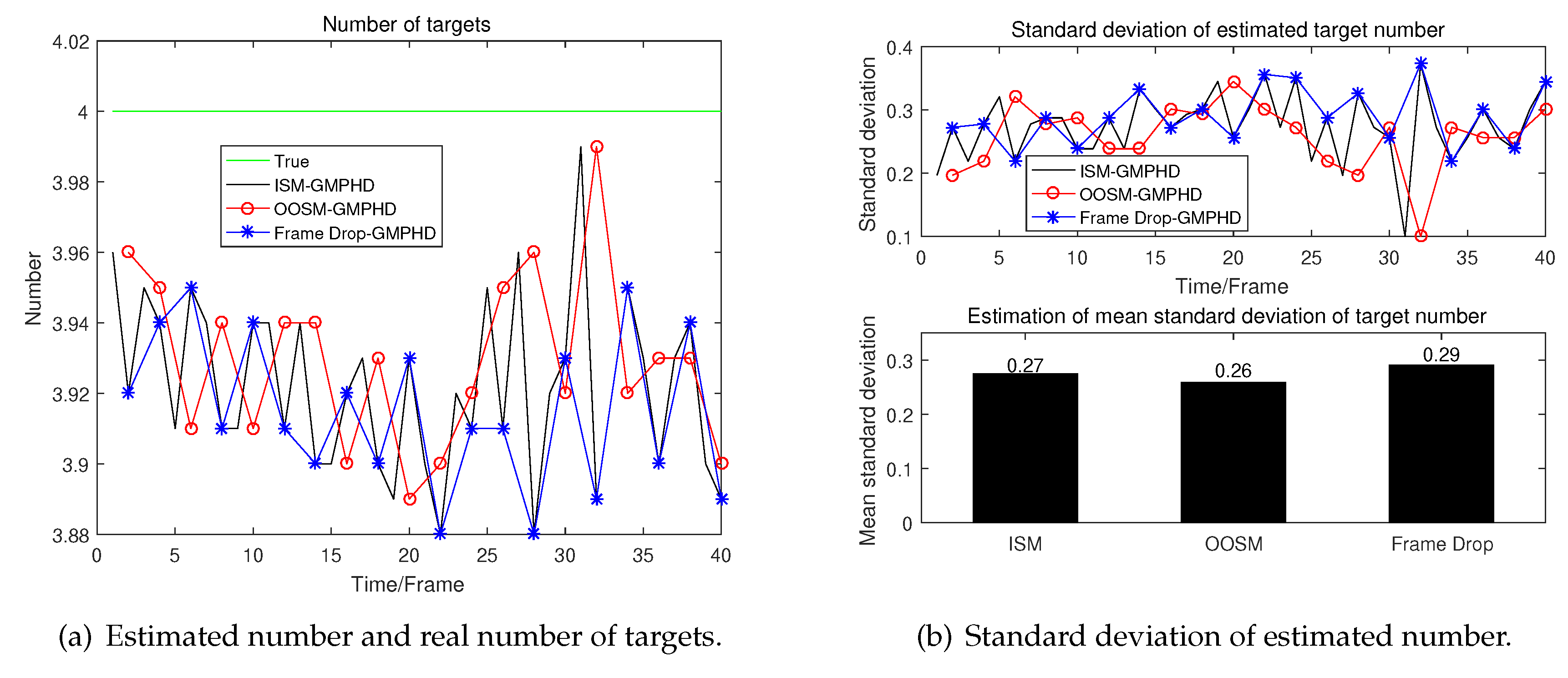
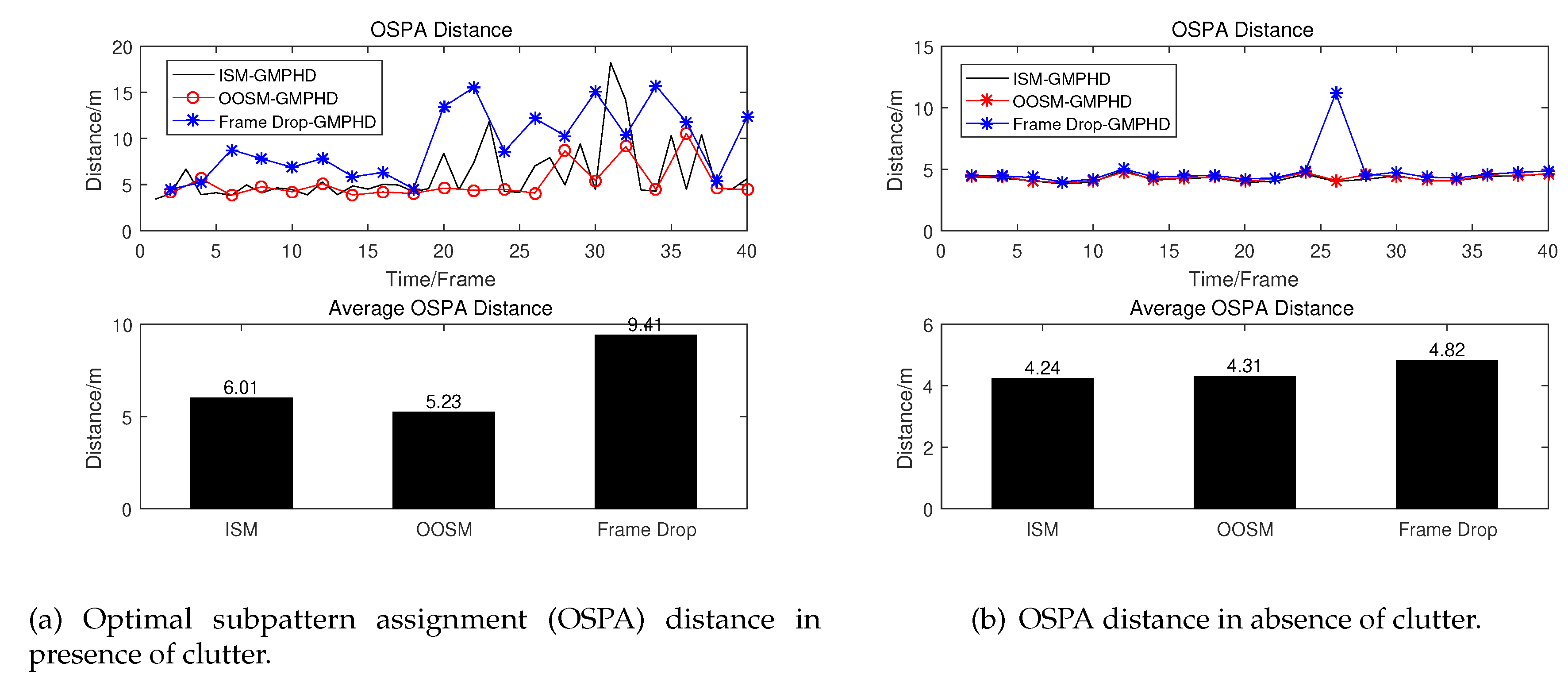
4.3. Simulations Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bar-Shalom, Y. Tracking and Data Association; Academic Press: Boston, MA, USA, 1987. [Google Scholar]
- Blackman, S.S. Multiple-Target Tracking with Radar Applications; Artech House, Inc.: Norwood, MA, USA, 1986. [Google Scholar]
- Reid, D. An algorithm for tracking multiple targets. IEEE Trans. Autom. Control 1979, 24, 843–854. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar] [CrossRef]
- He, S.; Shin, H.S.; Tsourdos, A. Joint probabilistic data association filter with unknown detection probability and clutter rate. Sensors 2018, 18, 269. [Google Scholar]
- Coraluppi, S.; Carthel, C.; Coon, A. An MHT approach to multi-sensor passive sonar tracking. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 480–487. [Google Scholar]
- Chong, C.Y.; Mori, S.; Reid, D.B. Forty years of multiple hypothesis tracking-a review of key developments. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 452–459. [Google Scholar]
- Mahler, R.P. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Goodman, I.R.; Mahler, R.P.; Nguyen, H.T. Mathematics of Data Fusion; Springer Science & Business Media: Heidelberg, Germany, 2013; Volume 37. [Google Scholar]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Chen, Y.; Sheng, X.; Guo, L.; Li, P.; Hao, H.; Yin, J. Asynchronous Multisonar Data Integration Approach Used to Detect Sparse Targets. IEEE Access 2019, 7, 37908–37917. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Li, Y.; Yu, J. PHD and CPHD Algorithms Based on a Novel Detection Probability Applied in an Active Sonar Tracking System. Appl. Sci. 2018, 8, 36. [Google Scholar] [CrossRef]
- Tanzmeister, G.; Steyer, S. Spatiotemporal alignment for low-level asynchronous data fusion with radar sensors in grid-based tracking and mapping. In Proceedings of the 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Baden-Baden, Germany, 19–21 September 2016; pp. 231–237. [Google Scholar]
- Hunde, A.; Ayalew, B. Automated multi-target tracking in public traffic in the presence of data association uncertainty. In Proceedings of the 2018 Annual American Control Conference (ACC), Milwaukee, WI, USA, 27–29 June 2018; pp. 300–306. [Google Scholar]
- Zhang, Z.; Fu, K.; Sun, X.; Ren, W. Multiple target tracking based on multiple hypotheses tracking and modified ensemble kalman filter in multi-sensor fusion. Sensors 2019, 19, 3118. [Google Scholar] [CrossRef]
- He, S.; Shin, H.S.; Tsourdos, A. Distributed joint probabilistic data association filter with hybrid fusion strategy. IEEE Trans. Instrum. Meas. 2019, 1–15. [Google Scholar] [CrossRef]
- Li, G.; Yi, W.; Jiang, M.; Kong, L. Distributed fusion with PHD filter for multi-target tracking in asynchronous radar system. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 1434–1439. [Google Scholar]
- Hamid Rezatofighi, S.; Milan, A.; Zhang, Z.; Shi, Q.; Dick, A.; Reid, I. Joint probabilistic data association revisited. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 13–16 December 2015; pp. 3047–3055. [Google Scholar]
- Kim, D.Y.; Vo, B.N.; Vo, B.T.; Jeon, M. A labeled random finite set online multi-object tracker for video data. Pattern Recognit. 2019, 90, 377–389. [Google Scholar] [CrossRef]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli sensor-selection for multi-target tracking with unknown clutter and detection profiles. Signal Process. 2016, 119, 28–42. [Google Scholar] [CrossRef]
- Sheng, X.; Chen, Y.; Guo, L.; Yin, J.; Han, X. Multitarget tracking algorithm using multiple GMPHD filter data fusion for sonar networks. Sensors 2018, 18, 3193. [Google Scholar] [CrossRef] [PubMed]
- Úbeda-Medina, L.; García-Fernández, Á.F.; Grajal, J. Adaptive auxiliary particle filter for track-before-detect with multiple targets. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2317–2330. [Google Scholar] [CrossRef]
- Martino, L.; Elvira, V.; Camps-Valls, G. Group Importance Sampling for particle filtering and MCMC. Digital Signal Process. 2018, 82, 133–151. [Google Scholar] [CrossRef] [Green Version]
- Crisan, D.; Miguez, J. Nested particle filters for online parameter estimation in discrete-time state-space Markov models. Bernoulli 2018, 24, 3039–3086. [Google Scholar] [CrossRef]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digital Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Bar-Shalom, Y. Update with out-of-sequence measurements in tracking: exact solution. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 769–777. [Google Scholar] [CrossRef]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems (Artech House Radar Library); Artech House: Boston, MA, USA, 1999. [Google Scholar]
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; University of Connecticutl: Storrs, CT, USA, 1995. [Google Scholar]
- Zhang, S.; Bar-Shalom, Y. Out-of-sequence measurement processing for particle filter: Exact Bayesian solution. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 2818–2831. [Google Scholar] [CrossRef]
- Li, M.; Yi, W.; Yang, Q.; Kong, L. An Efficient Particle Filter for the OOSM Problem in Nonlinear Dynamic Systems. In Proceedings of the 2018 21st International Conference on Information Fusion (FUSION), Cambridge, UK, 10–13 July 2018; pp. 1890–1895. [Google Scholar]
- Hoffman, J.R.; Mahler, R.P. Multitarget miss distance via optimal assignment. IEEE Trans. Syst. Man Cybern. 2004, 34, 327–336. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | ISM | OOSM | Frame Drop | |
|---|---|---|---|---|
| OSPA Distance (m) | ||||
| clutter = 0 | 4.24 | 4.31 | 4.82 | |
| clutter = 4 | 6.01 | 5.23 | 9.41 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Huai, T.; Zheng, R.; Zhang, S. Multisensor Multi-Target Tracking Based on GM-PHD Using Out-Of-Sequence Measurements. Sensors 2019, 19, 4315. https://doi.org/10.3390/s19194315
Liu M, Huai T, Zheng R, Zhang S. Multisensor Multi-Target Tracking Based on GM-PHD Using Out-Of-Sequence Measurements. Sensors. 2019; 19(19):4315. https://doi.org/10.3390/s19194315
Chicago/Turabian StyleLiu, Meiqin, Tianyi Huai, Ronghao Zheng, and Senlin Zhang. 2019. "Multisensor Multi-Target Tracking Based on GM-PHD Using Out-Of-Sequence Measurements" Sensors 19, no. 19: 4315. https://doi.org/10.3390/s19194315