Chaotic Oscillators as Inductive Sensors: Theory and Practice

 ,
,  , and
, and 
Abstract
:1. Introduction
2. Materials and Methods
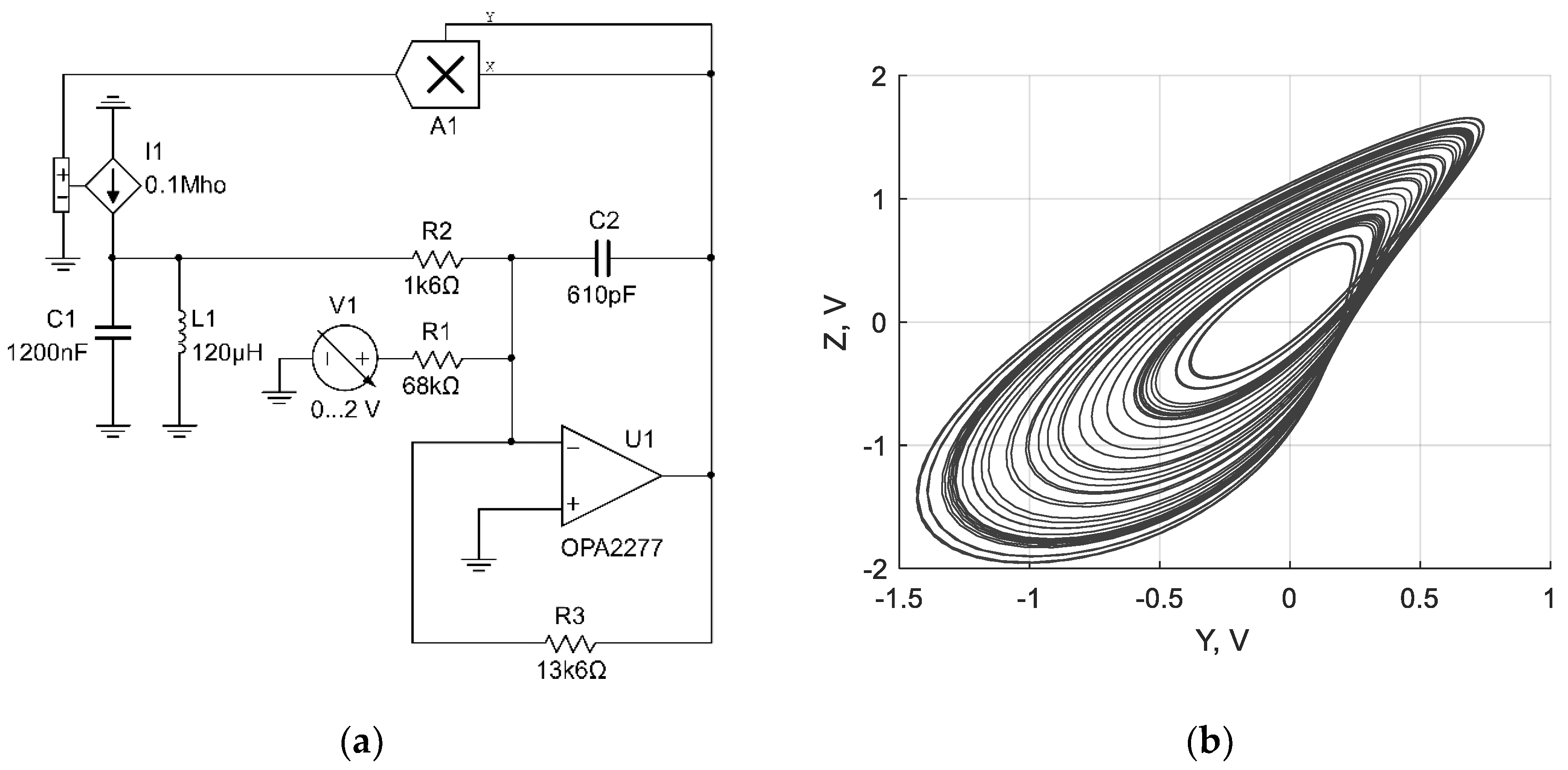
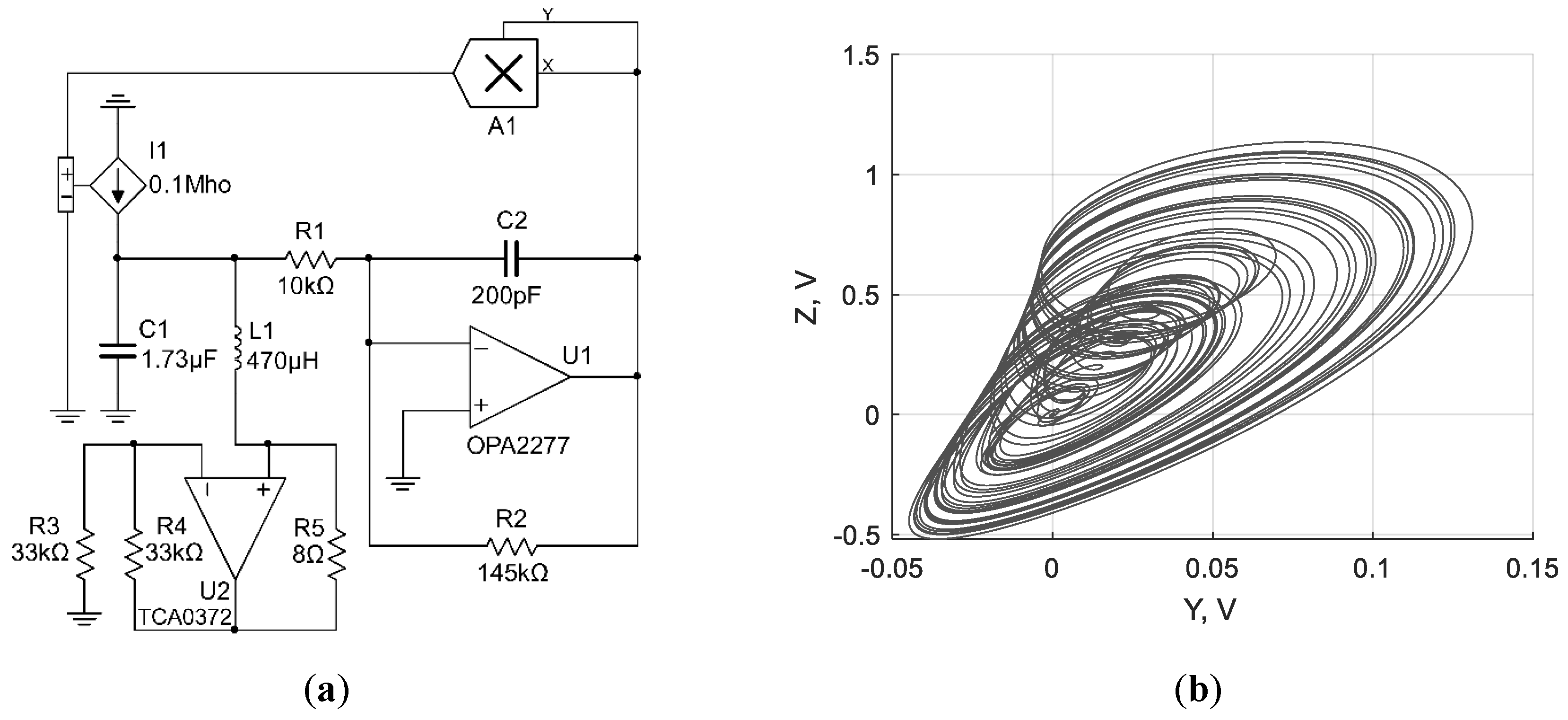
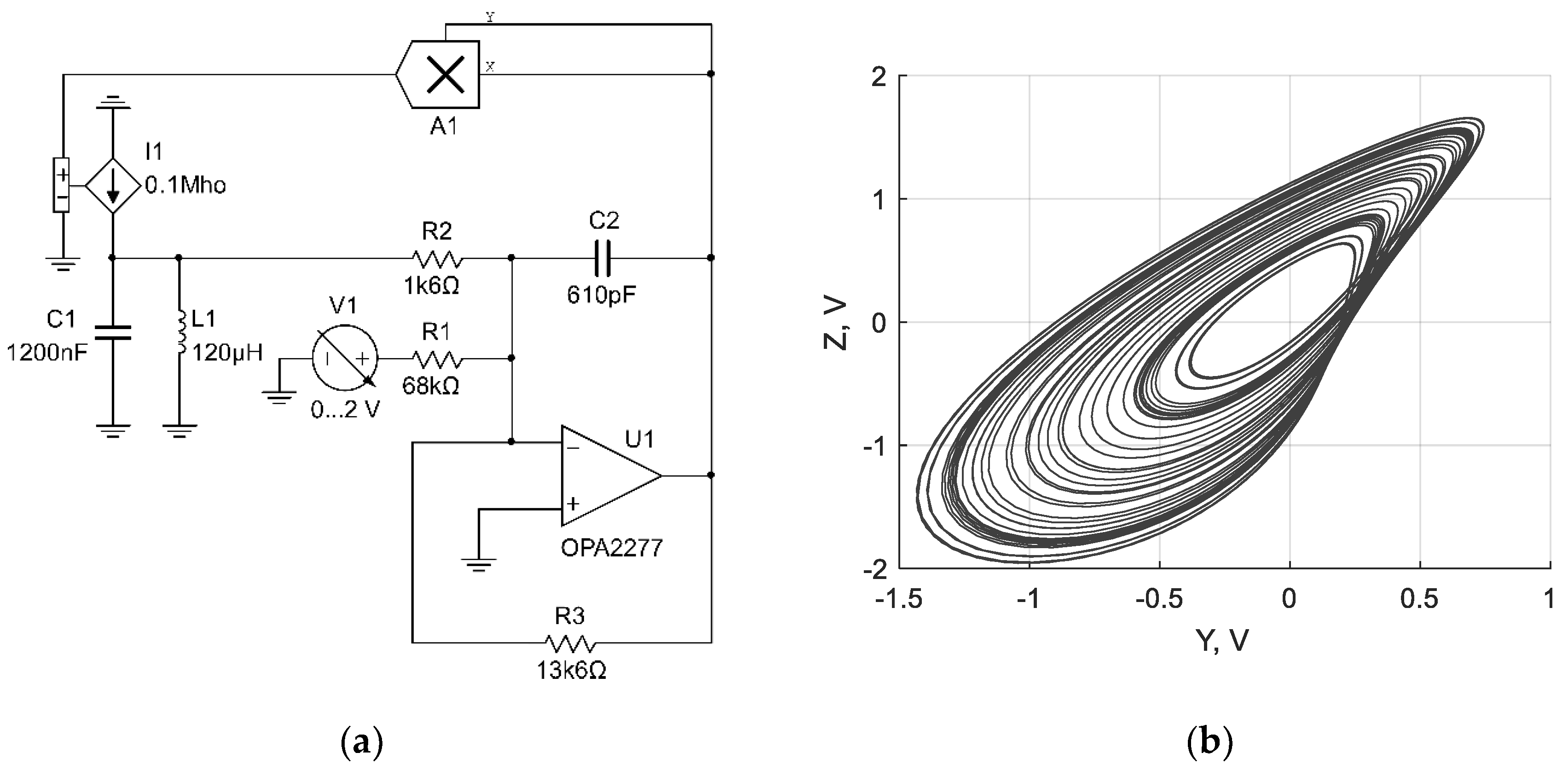
2.1. Synthesis of the Chaotic Circuit with Inductive Element
2.1.1. Converting the Differential Equation into the Circuit
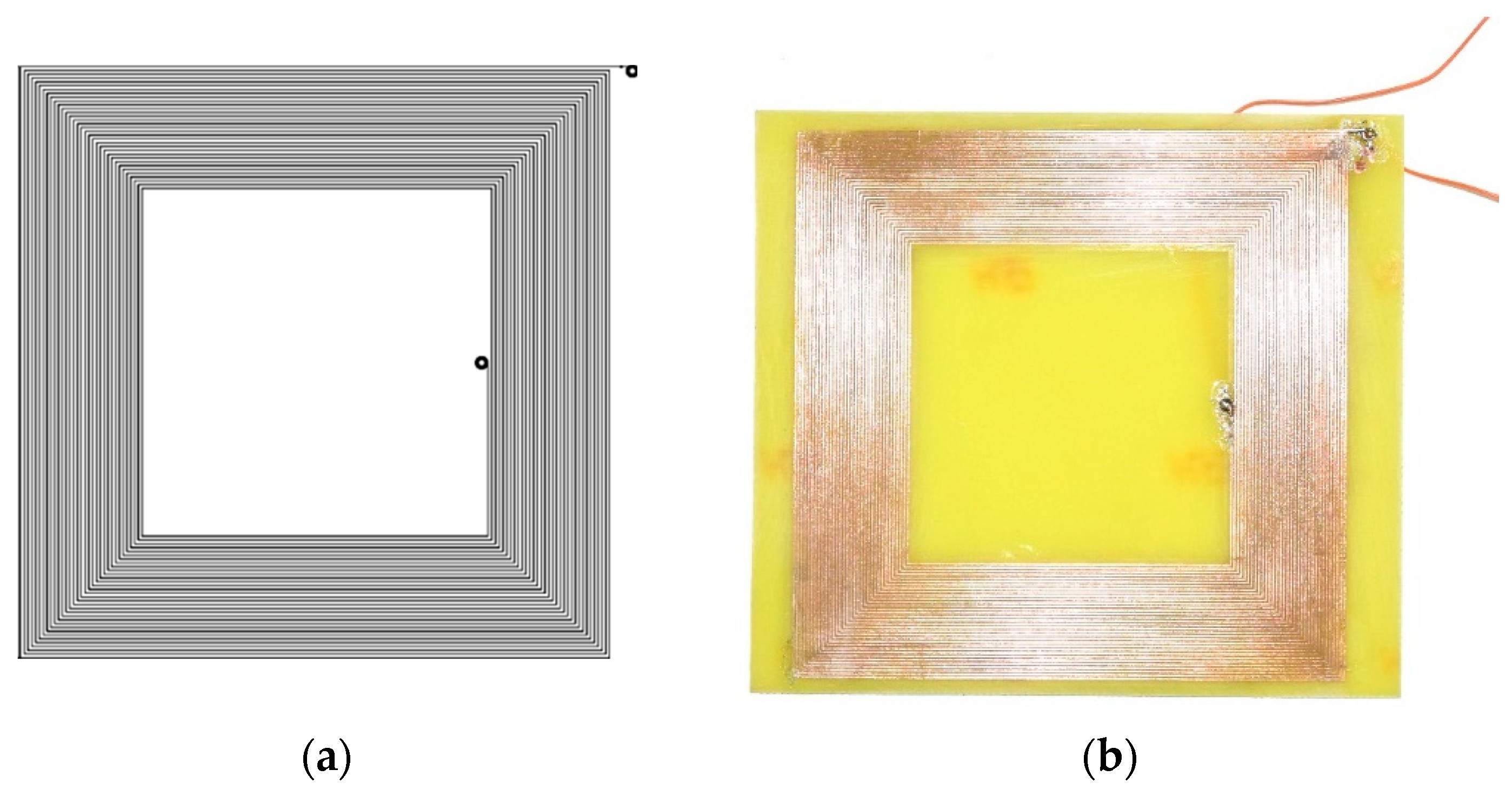
2.1.2. Coil and Targets
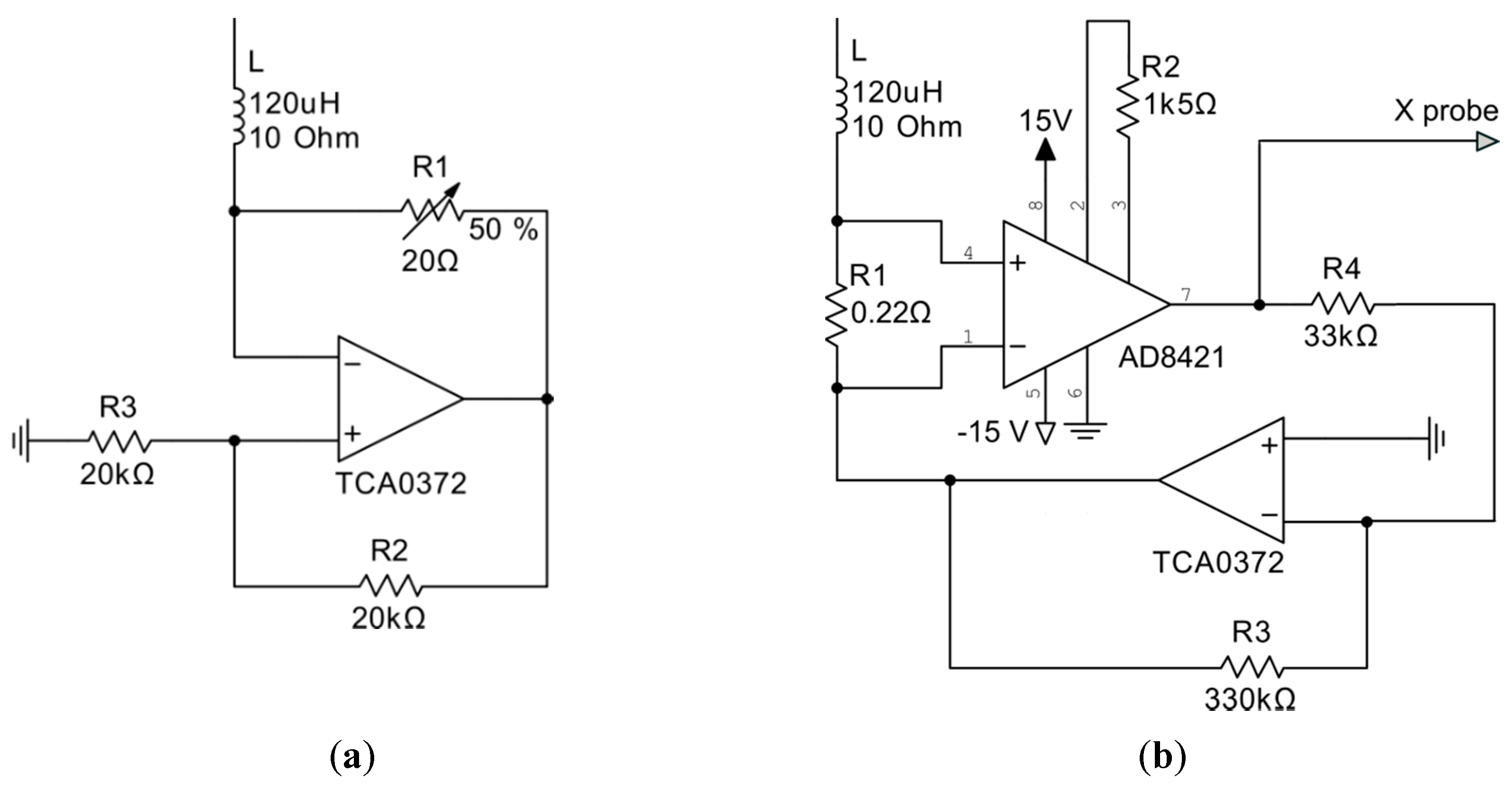
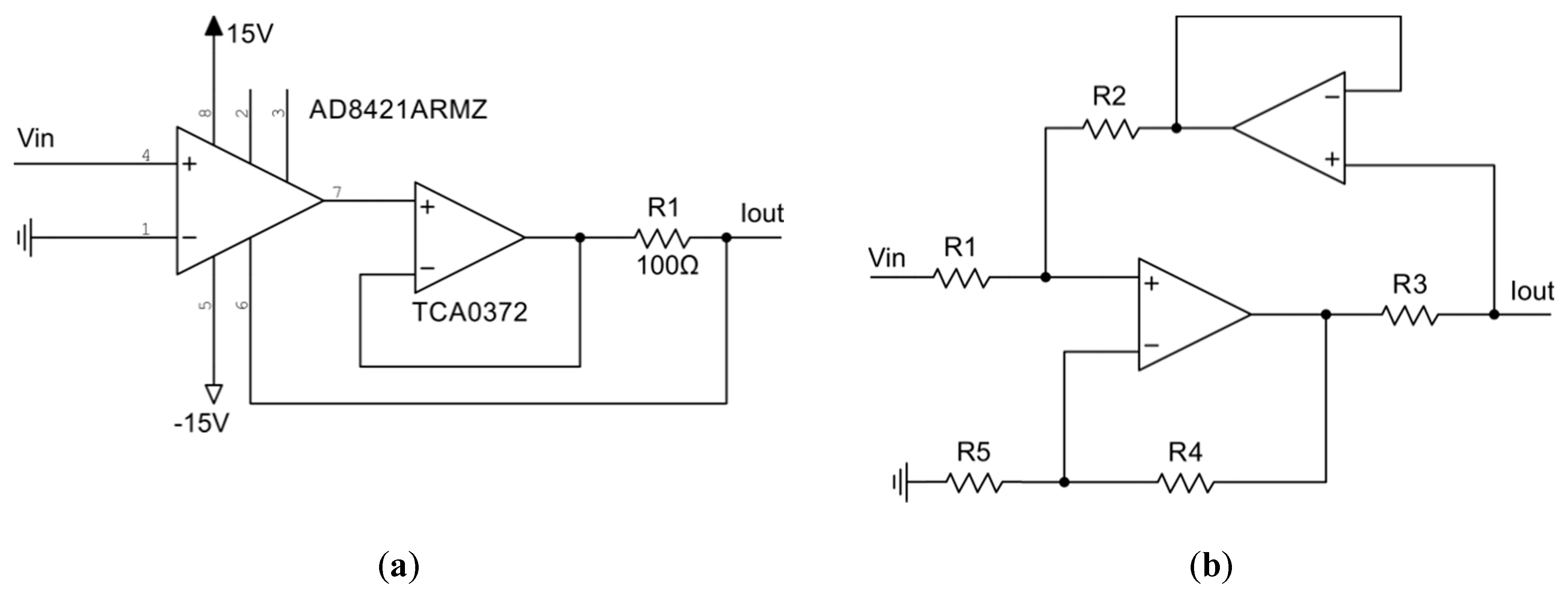
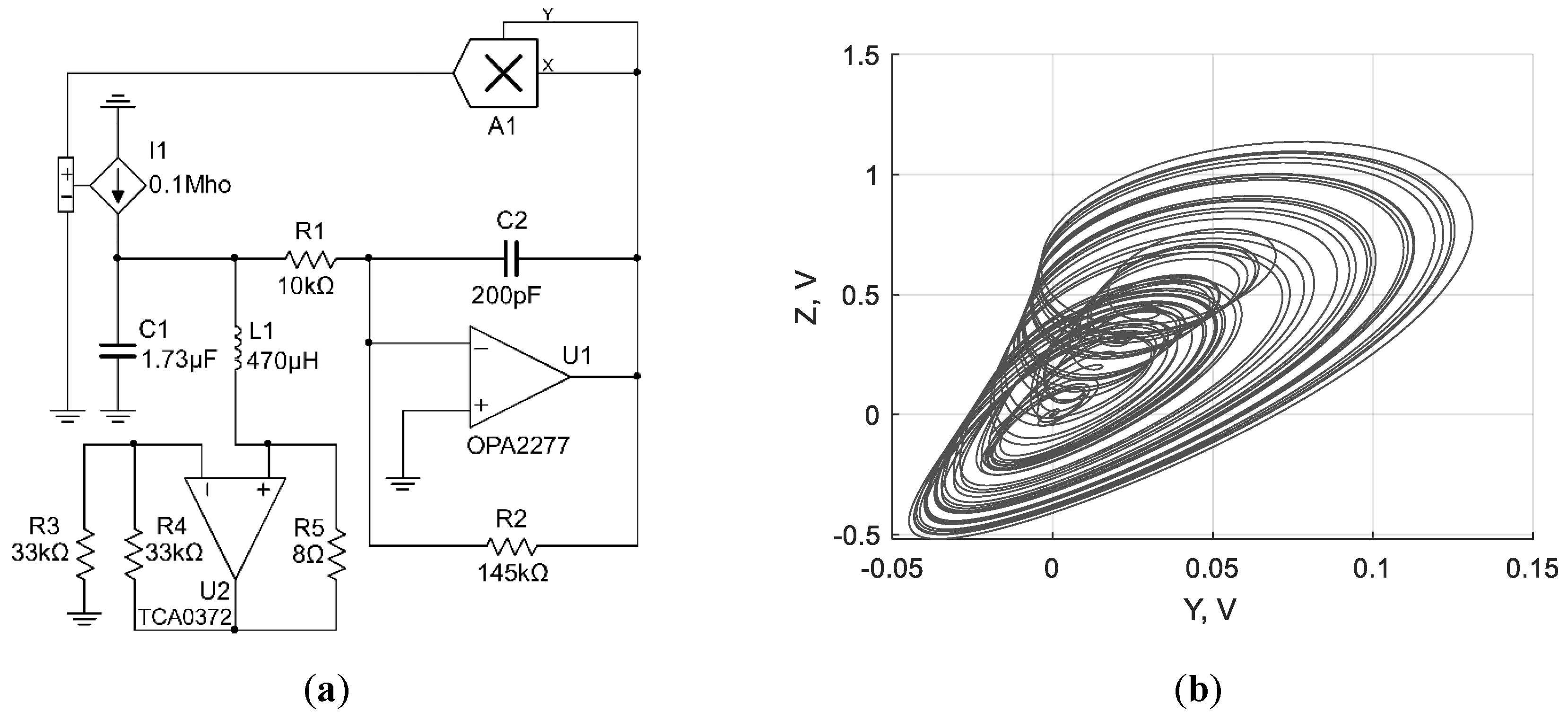
2.1.3. Effect of the Coil Series Resistance
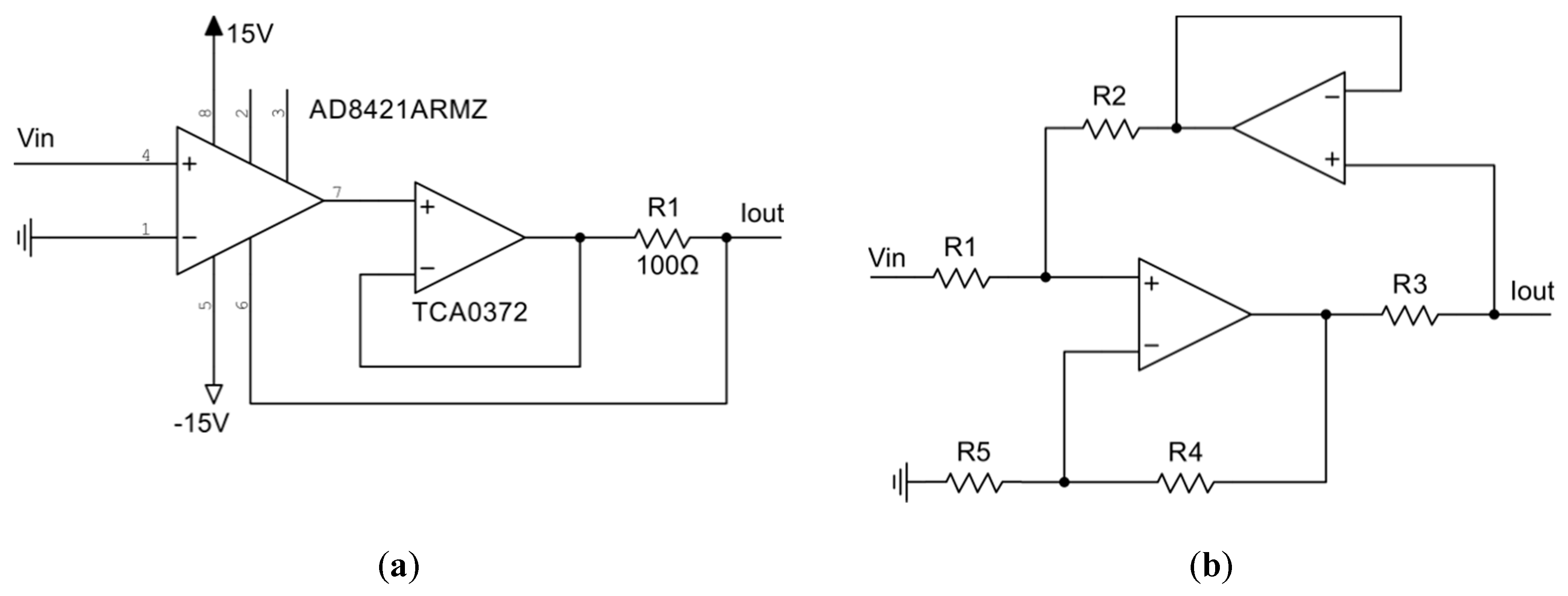
- The use of a negative impedance converter (NIC), see Figure 8a. Trimmer R1 is used when the resistance of the coil is unknown or when the circuit is to be used with several coils.
- The use of a current sensor with subsequent voltage compensation at the bottom connection point of the inductance. The appropriate circuit is shown in Figure 8b. The ratio of resistors R3 and R4 sets the gain of the operational amplifier and can be calculated by the following equation:
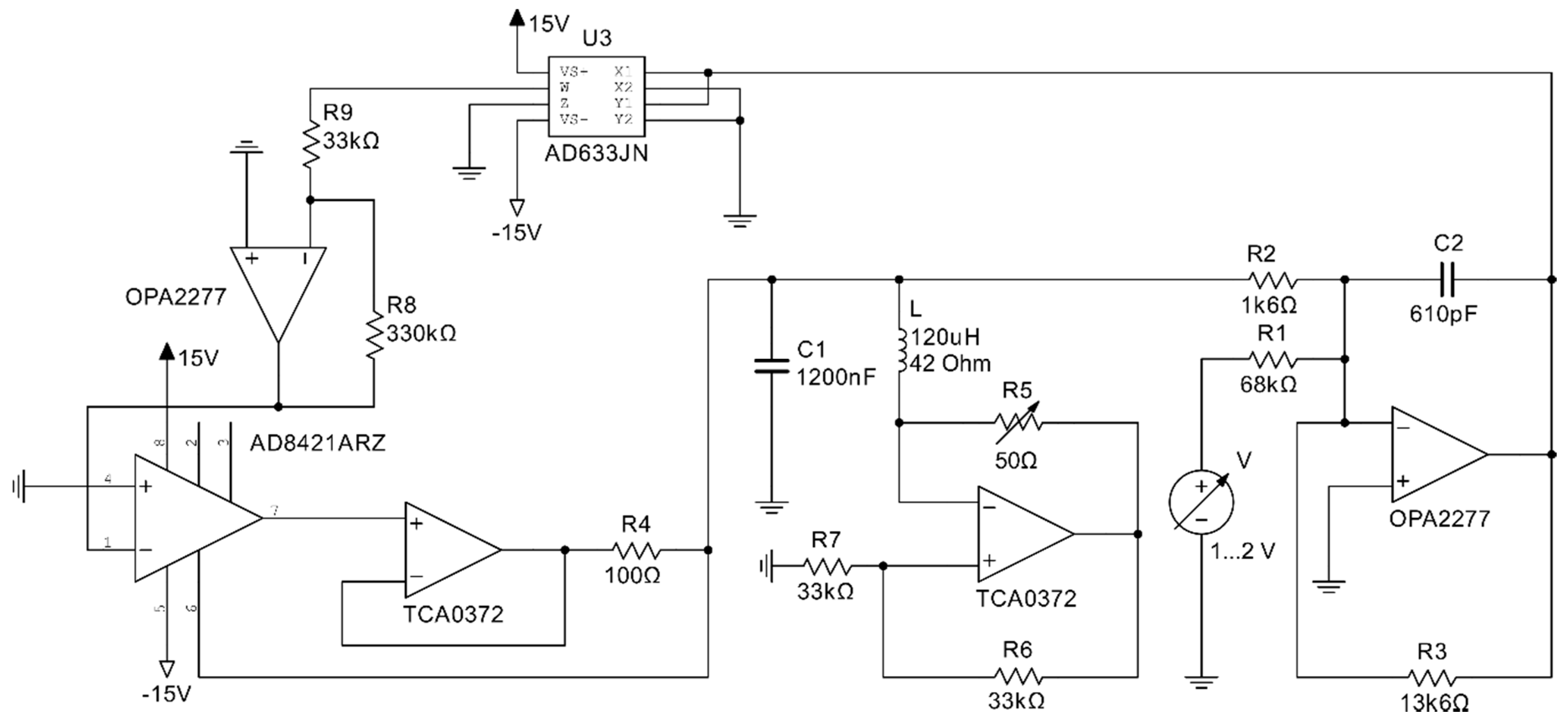
2.1.4. Controlled Source Implementation
2.1.5. Influence of the Voltage-Controlled Current Source
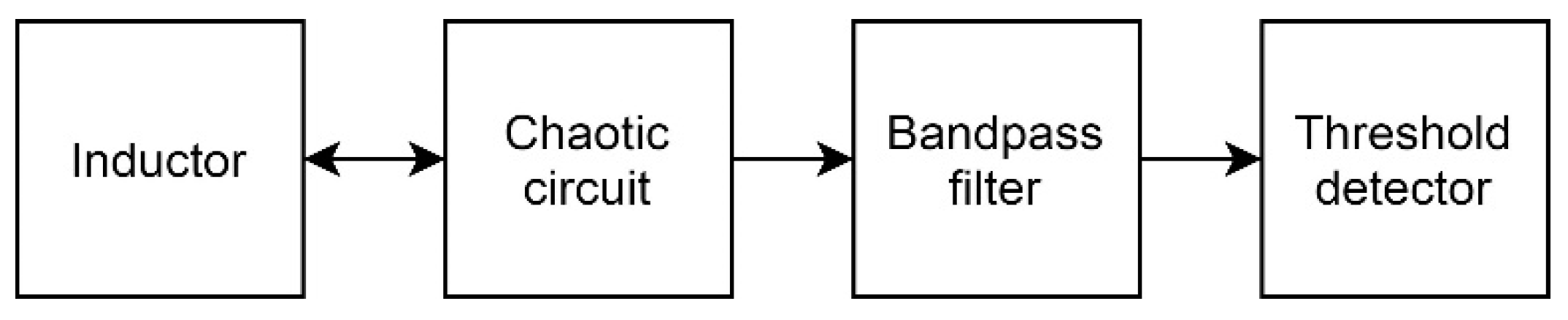
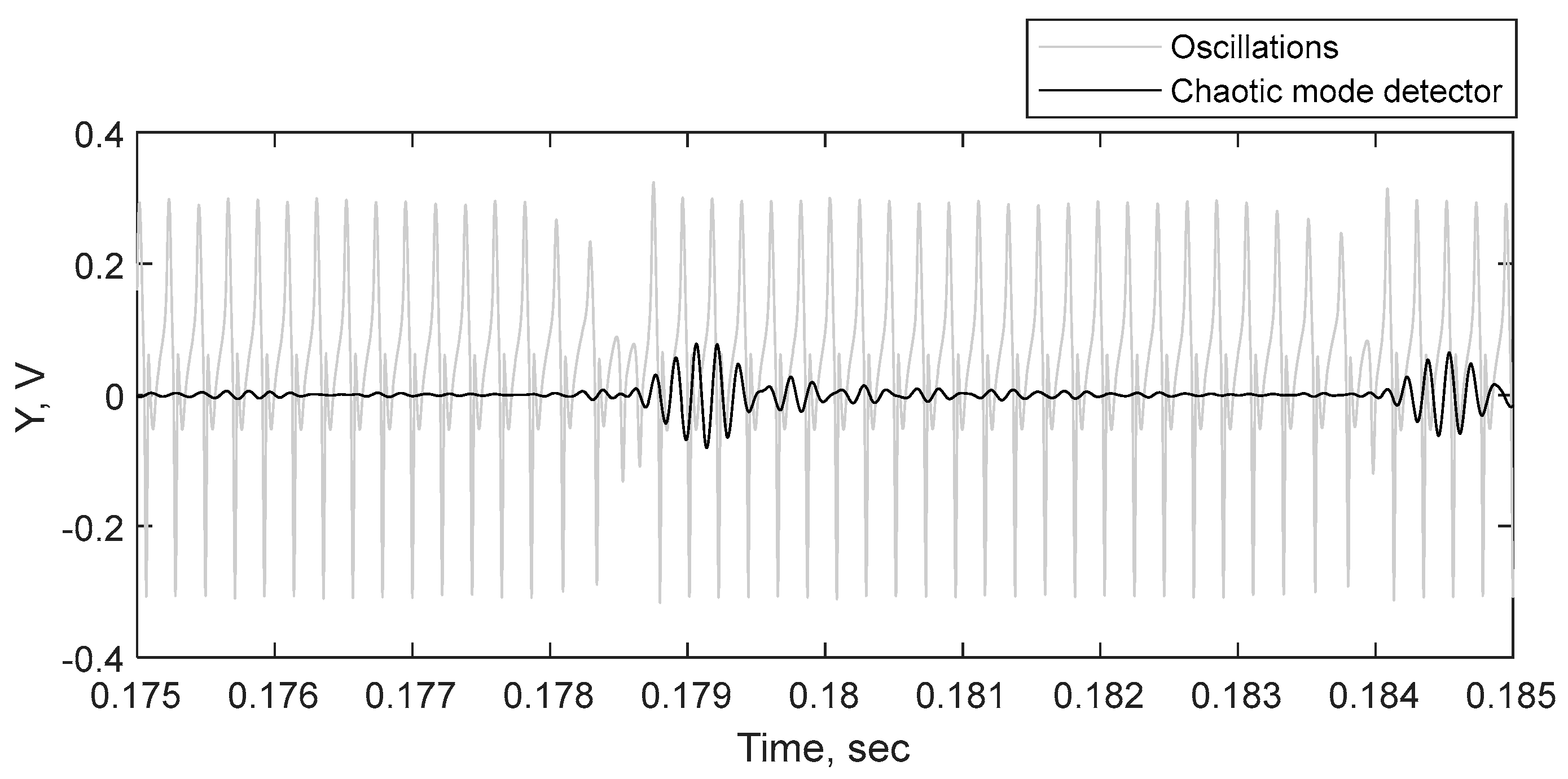
2.2. Target Detection
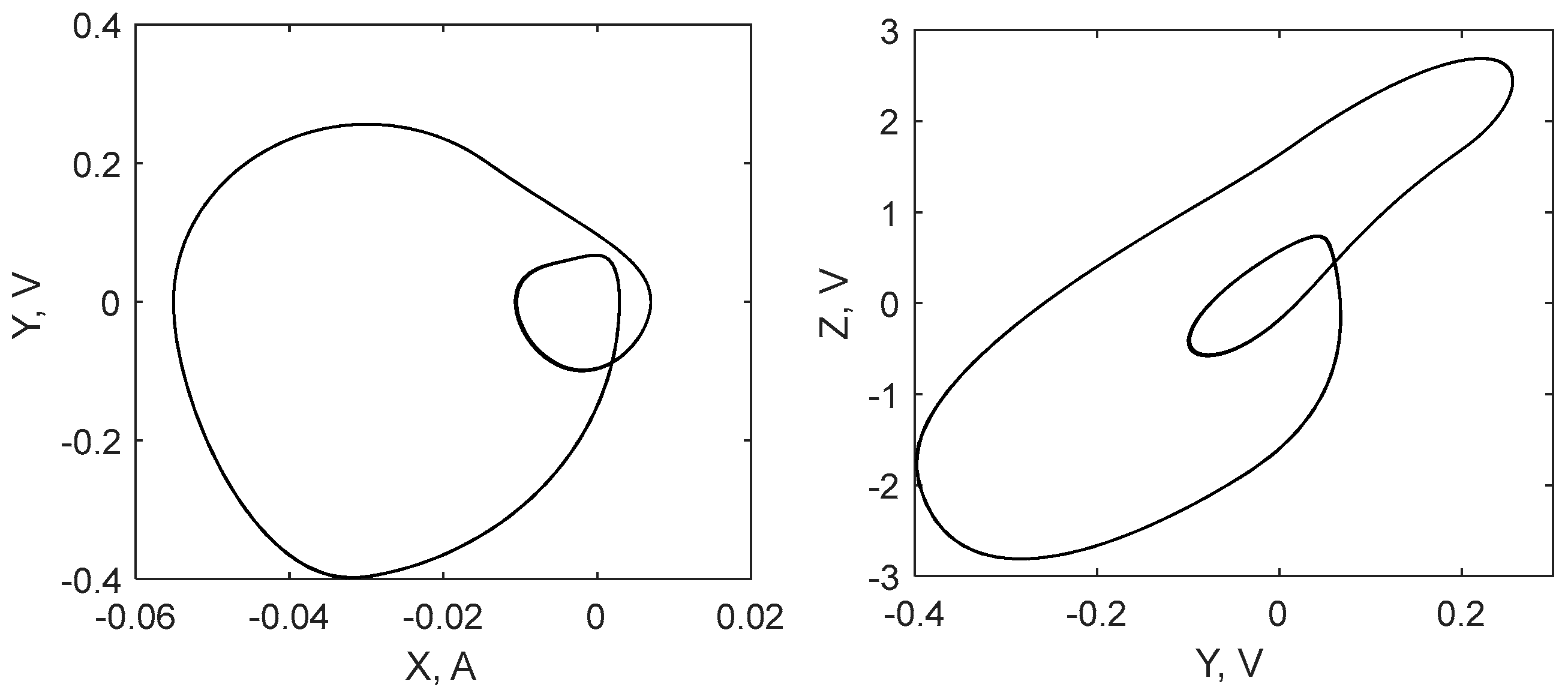
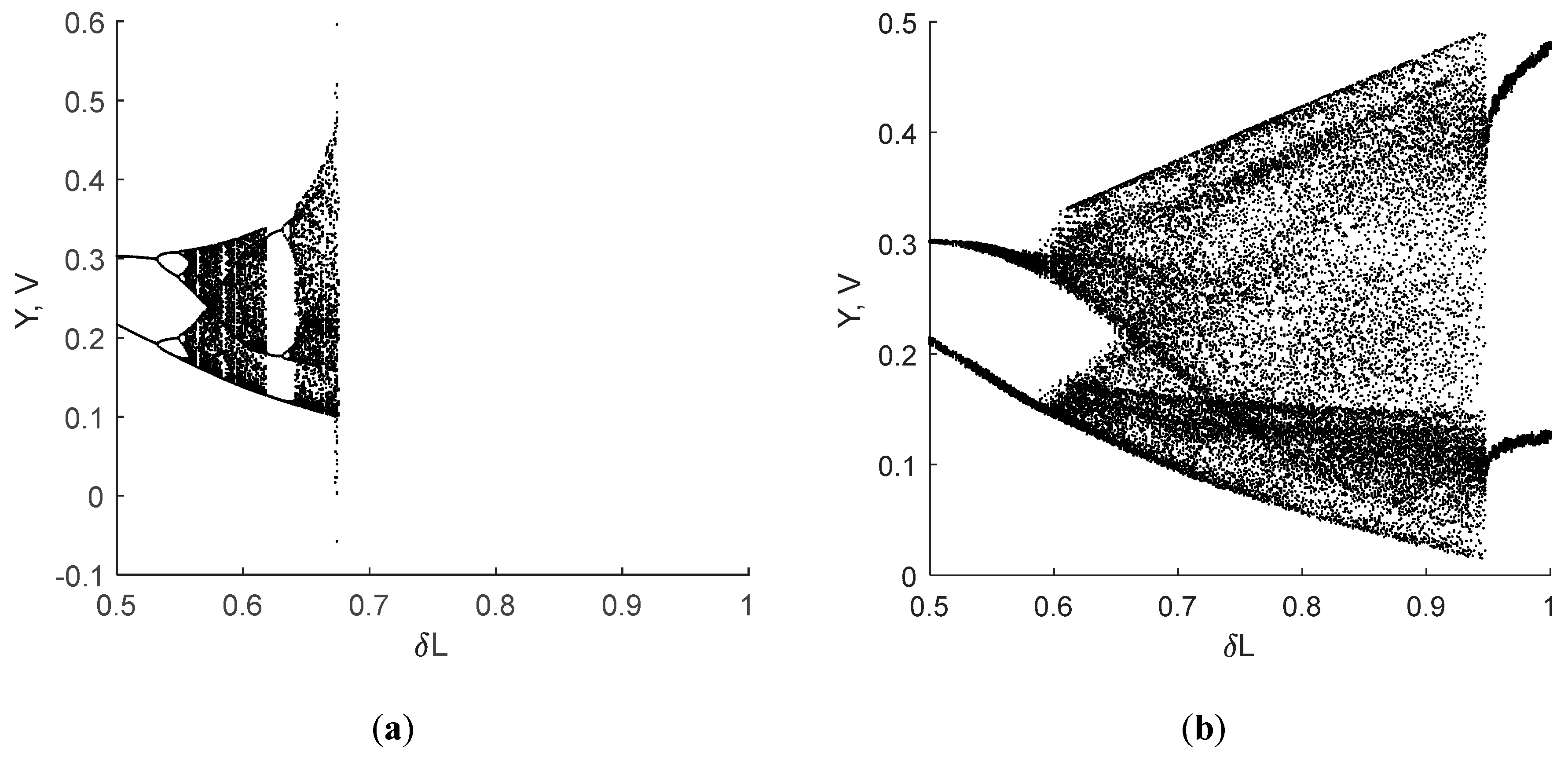
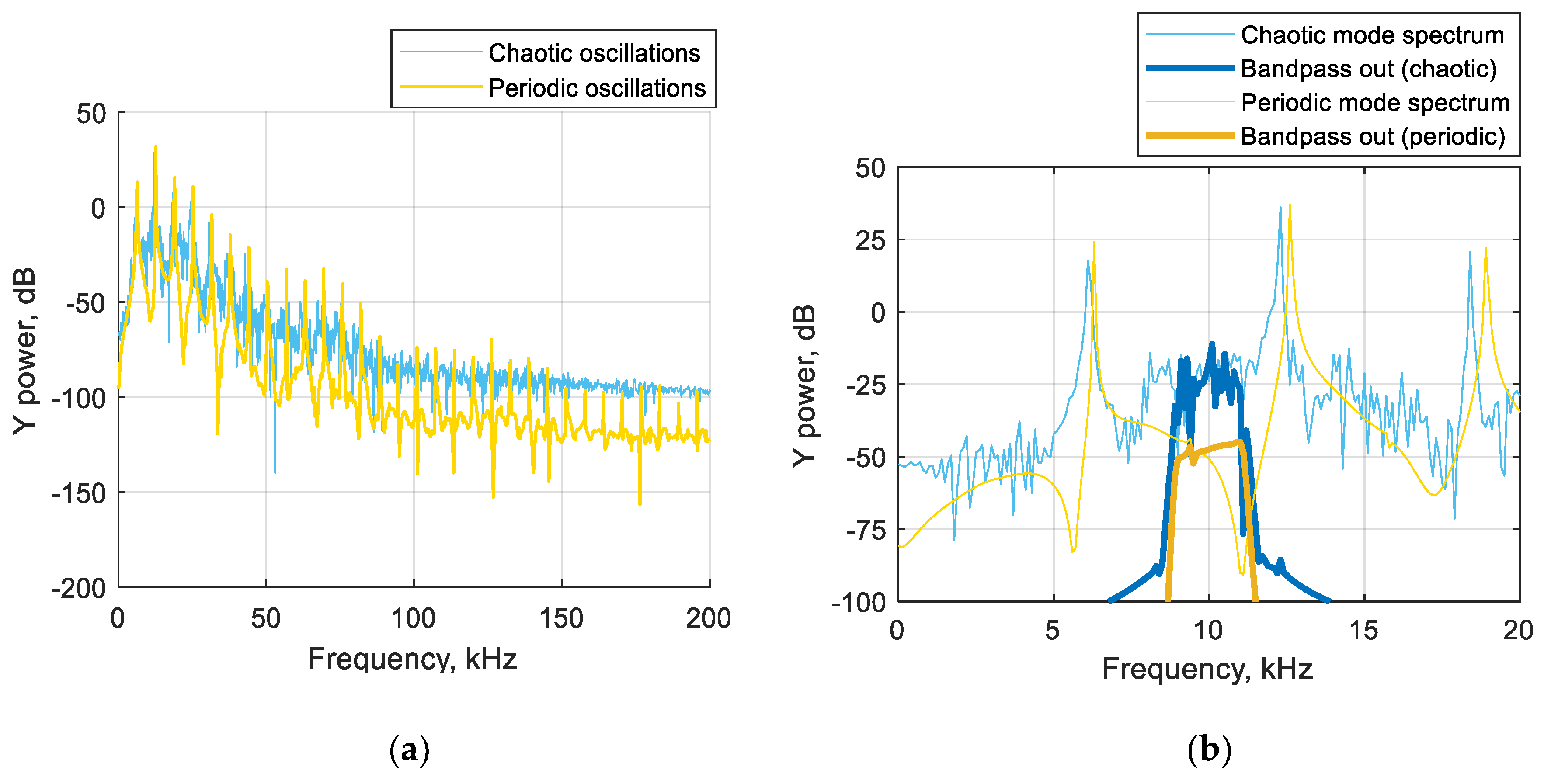
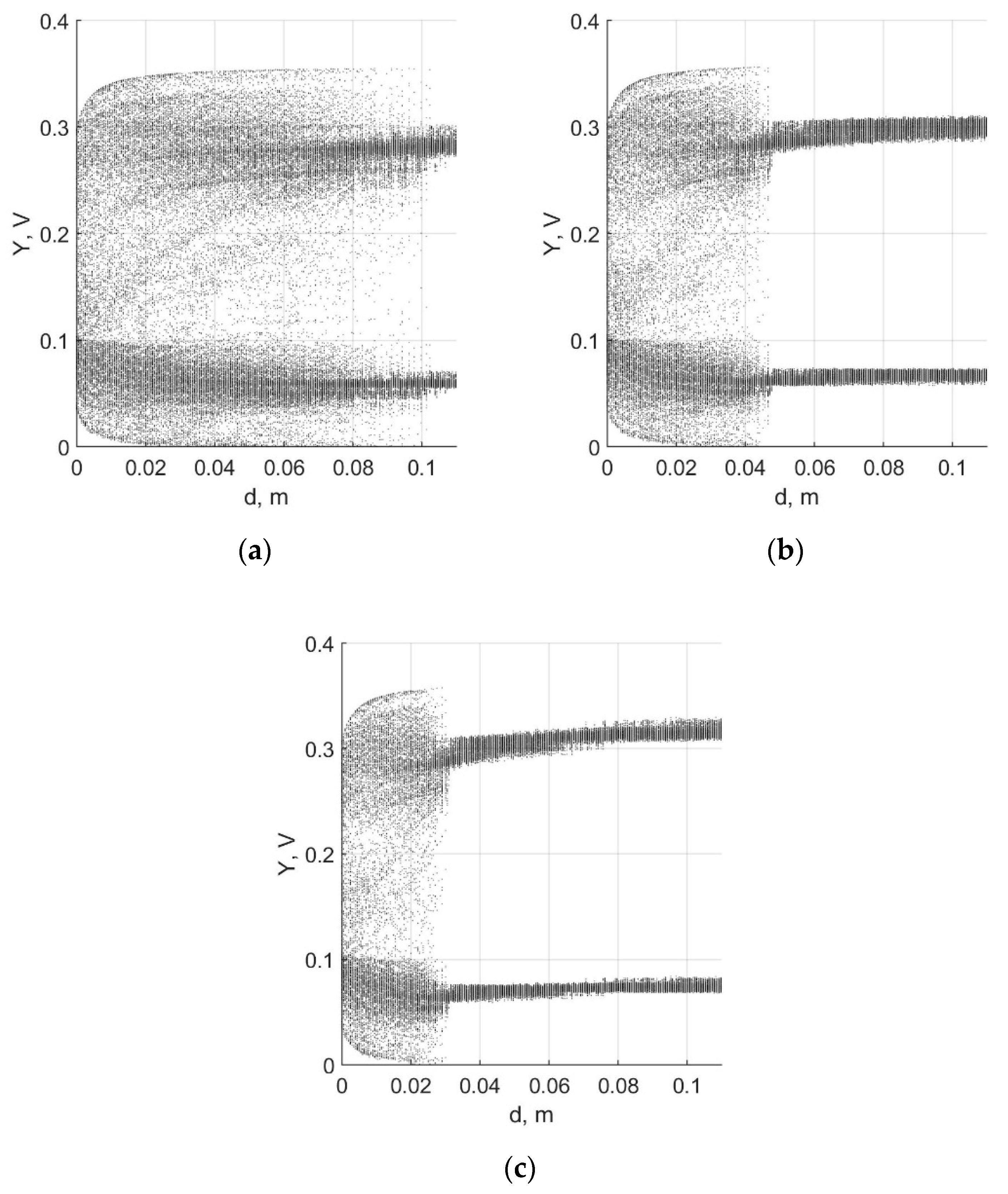
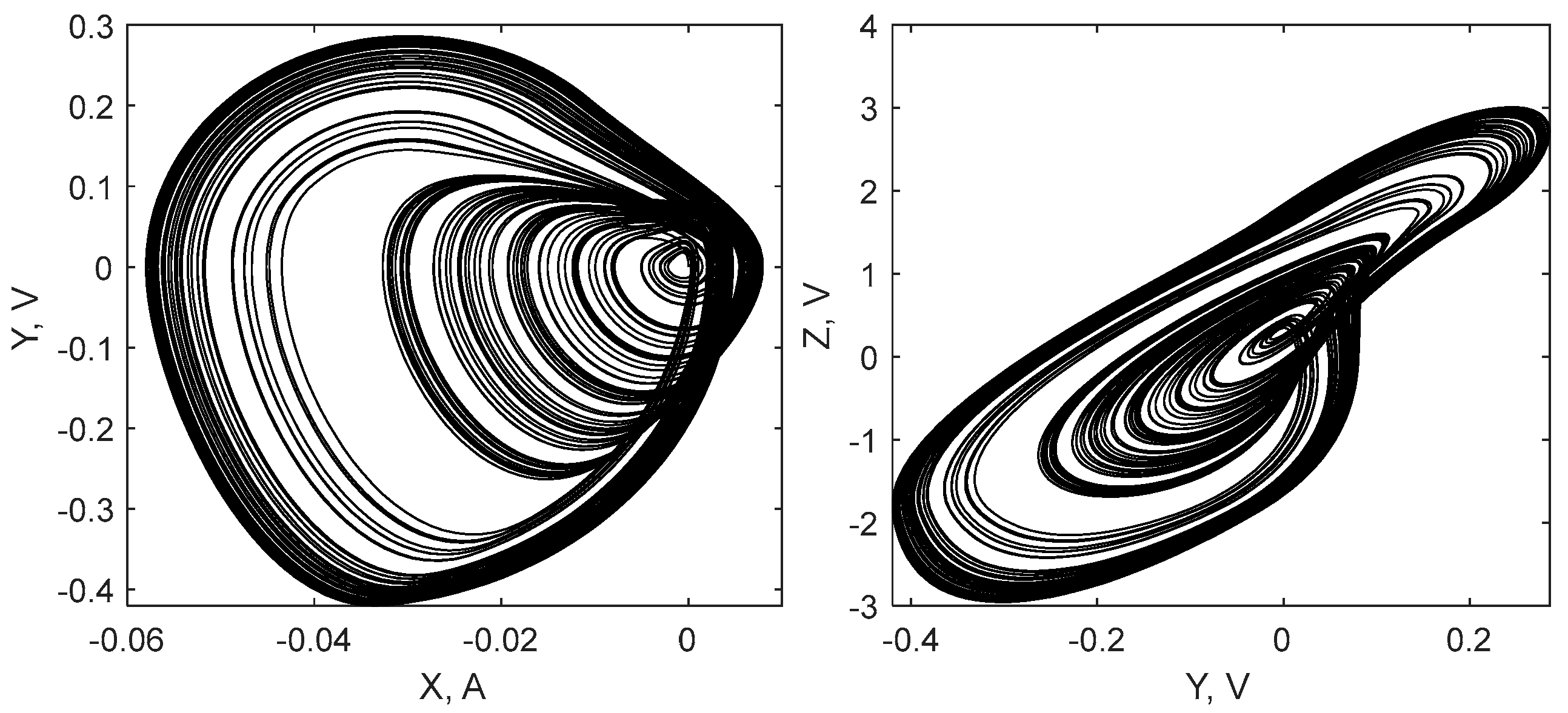
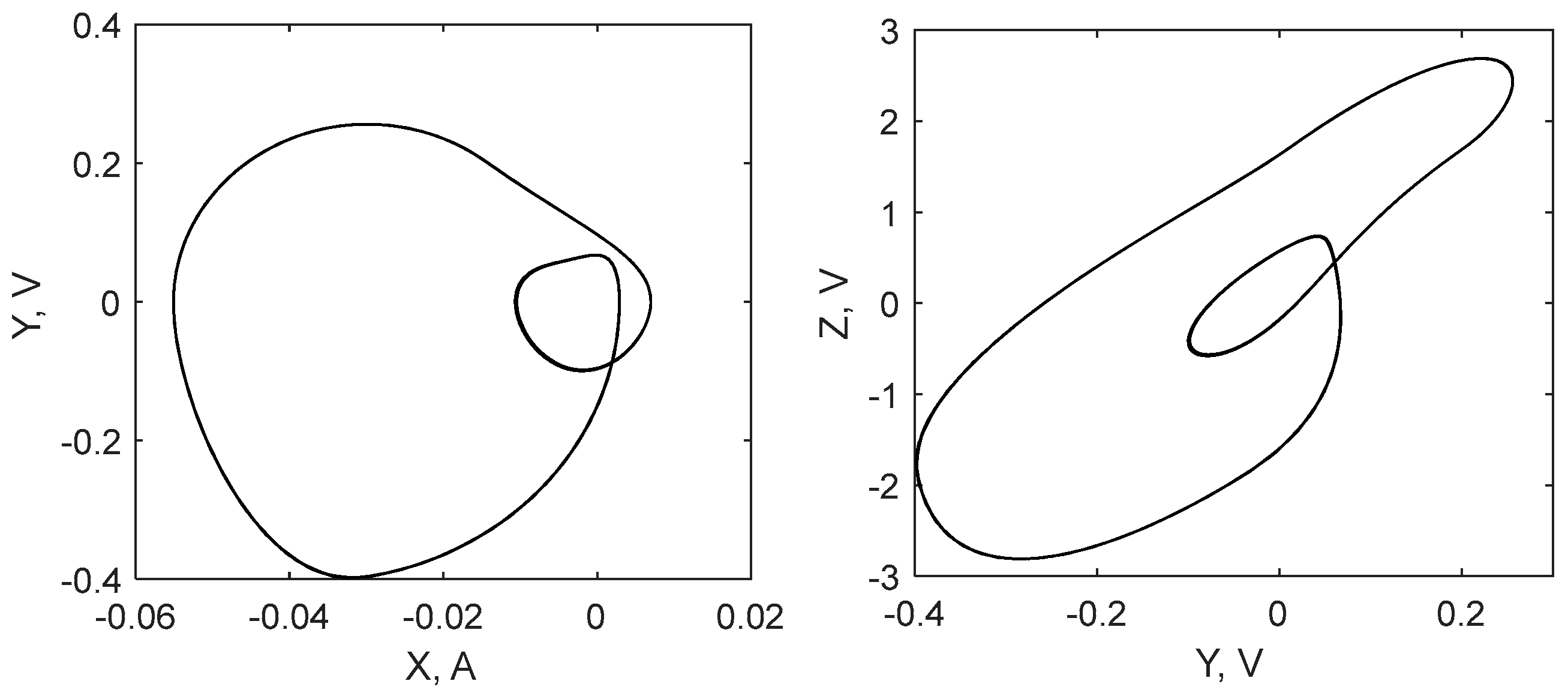
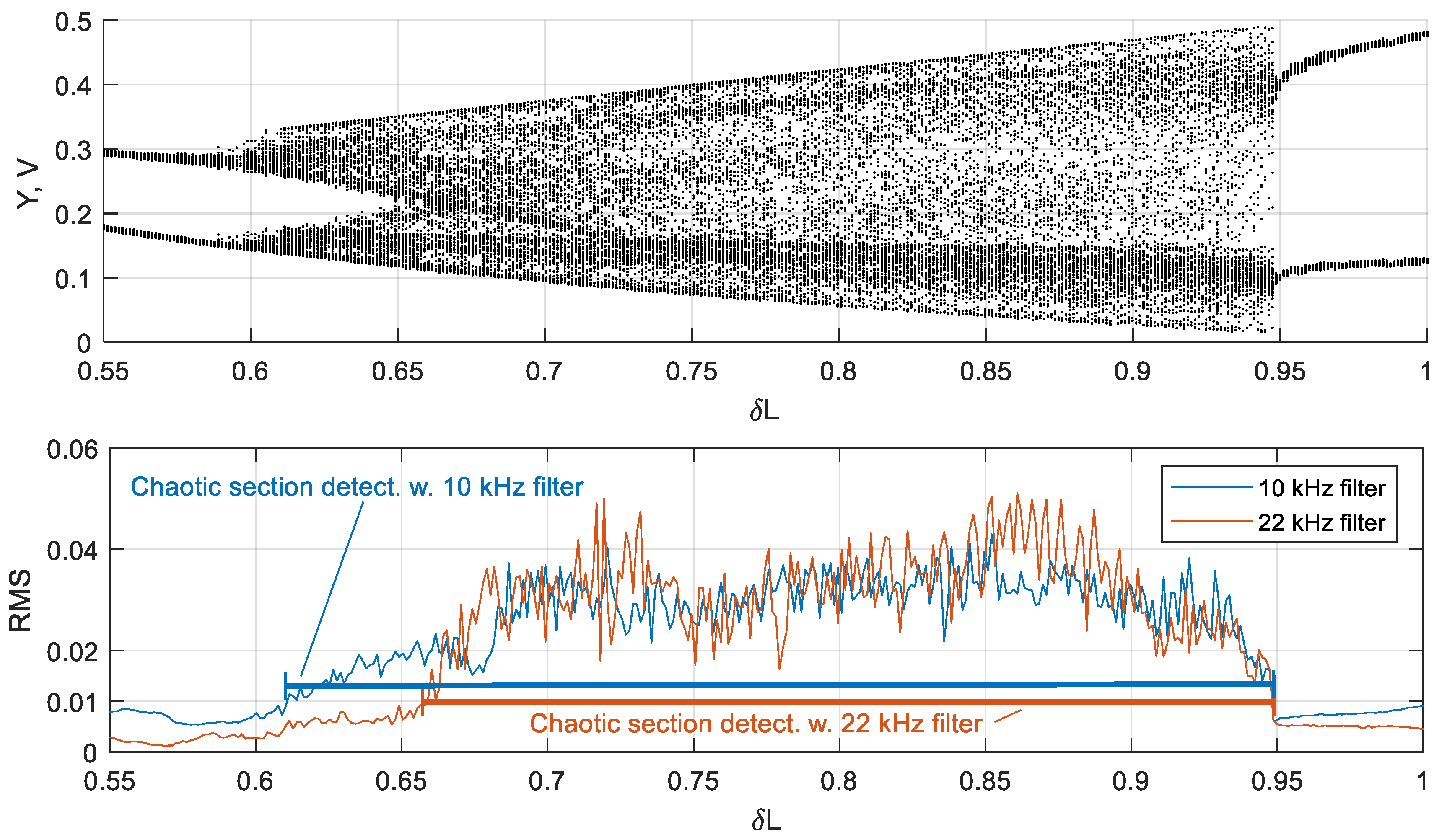
2.2.1. Analysis of the Oscillation Regime
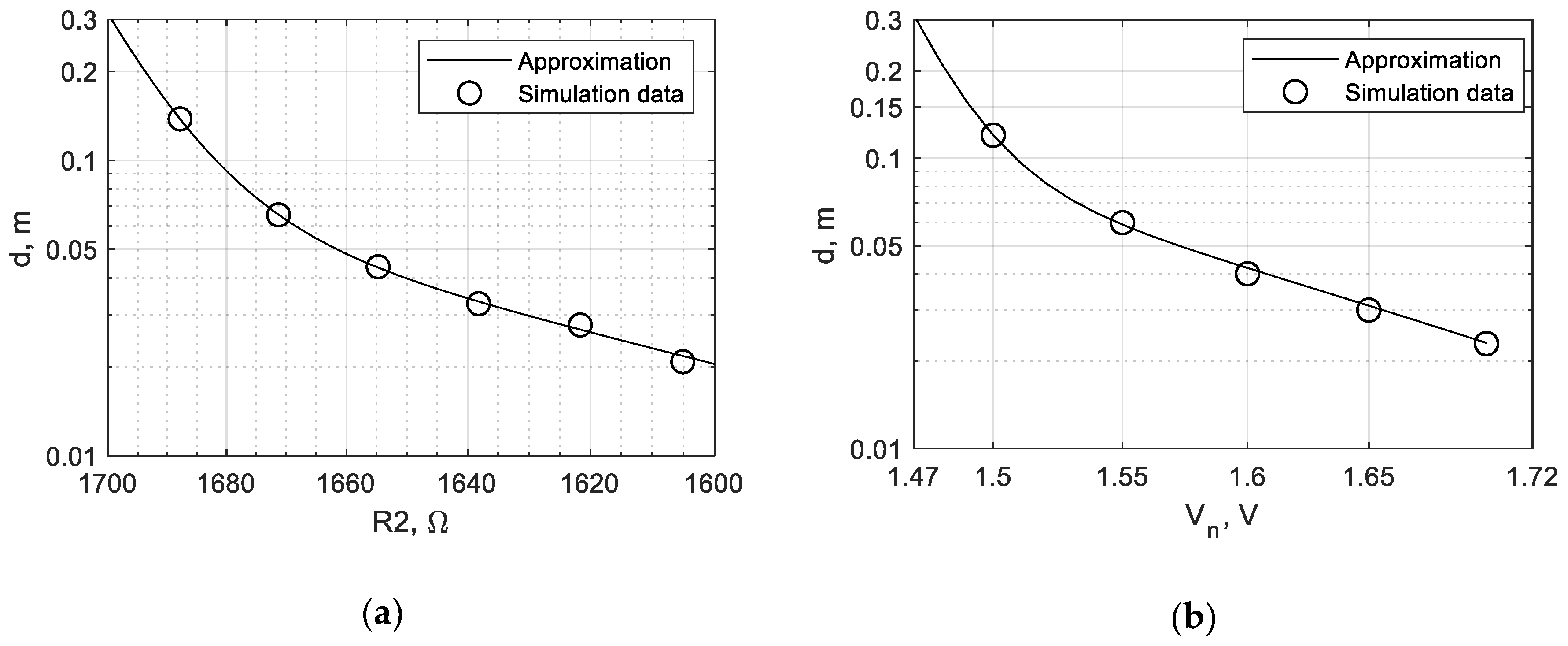
2.2.2. Sensitivity Tuning
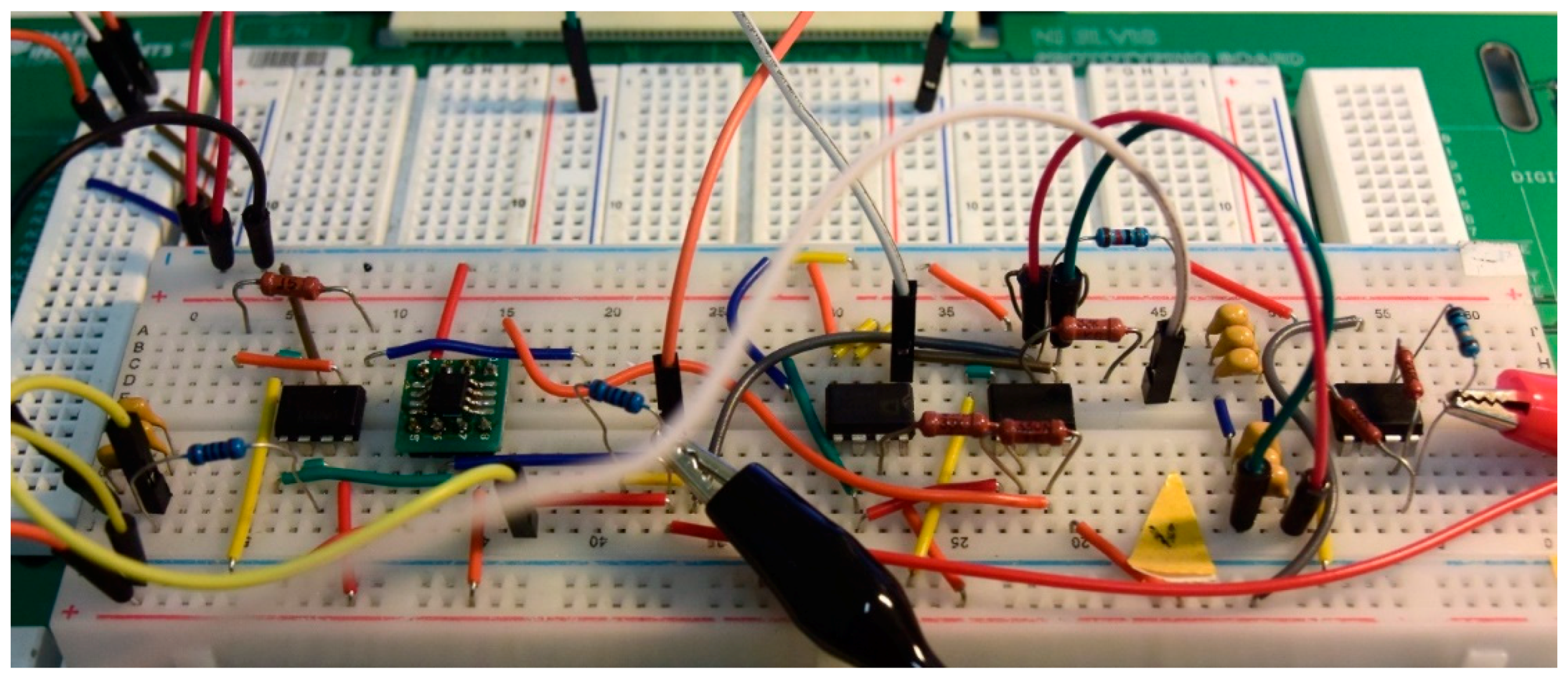
3. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Zuk, S.; Pietrikova, A.; Vehec, I. LTCC based planar inductive proximity sensor design. Period. Polytech. Electr. Eng. Comput. Sci. 2016, 60, 200–205. [Google Scholar] [CrossRef]
- Passeraub, A.; Besse, P.A.; Bayadroun, A.; Hediger, S.; Bernasconi, E.; Popovic, R.S. First integrated inductive proximity sensor with on-chip CMOS readout circuit and electrodeposited 1 mm flat coil. Sens. Actuators A Phys. 1999, 76, 273–278. [Google Scholar] [CrossRef]
- Sosnicki, O.; Michaud, G.; Claeyssen, F. Eddy Current Sensors on Printed Circuit Board for Compact Mechatronic Application. In Proceedings of the Sensoren und Messsysteme, Meylan, France, 18–19 May 2010; pp. 244–251. [Google Scholar]
- Guo, Y.-X.; Shao, Z.-B.; Li, T. An Analog-Digital Mixed Measurement Method of Inductive Proximity Sensor. Sensors 2016, 16, 30. [Google Scholar] [CrossRef] [PubMed]
- Antonovich, M.; Druzhina, O.; Serebryakova, V.; Butusov, D.; Kopets, E. The analysis of oscillations in chaotic circuit with sensitive inductive coil. In Proceedings of the IEEE Conference of Russian Young Researches in Electrical and Electronic Engineering (ElConRus), Saint Petersburg, Russia, 28–31 January 2019; pp. 52–56. [Google Scholar]
- Brown, R.; Chua, L.O.; Popp, B. Is sensitive dependence on initial conditions nature’s sensory device? Int. J. Bifurc. Chaos 1996, 2, 193–199. [Google Scholar] [CrossRef]
- Teodorescu, H.L. Modeling natural sensitivity: A Life sensitive, selective sensors. Biomed. Soft Comput. Hum. Sci. 2000, 6, 29–34. [Google Scholar]
- Teodorescu, H.N.; Cojocaru, V.P. Biomimetic Chaotic Sensors for Water Salinity Measurements and Conductive Titrimetry. In Proceedings of the Third International Conference on Emerging Security Technologies, Lisbon, Portugal, 5–7 September 2012; pp. 182–185. [Google Scholar]
- Hu, W.; Liu, Z. Study of Metal Detection Based on Chaotic Theory. In Proceedings of the 8th World Congress on Intelligent Control and Automation, Jinan, China, 7–9 July 2010; pp. 2309–2314. [Google Scholar]
- Shi, H.; Fan, S.; Xing, W.; Sun, J. Study of weak vibrating signal detection based on chaotic oscillator in mems resonant beam sensor. Mech. Syst. Signal Process. 2015, 50, 535–547. [Google Scholar] [CrossRef]
- Wang, G.; Chen, D.; Lin, J.; Chen, X. The application of chaotic oscillators to weak signal detection. IEEE Trans. Ind. Electron. 1999, 46, 440–444. [Google Scholar] [CrossRef]
- Korneta, W.; Garcia-Moreno, E.; Sena, A.L. Noise activated dc signal sensor based on chaotic Chua circuit. Commun. Nonlinear Sci. Numer. Simul. 2015, 24, 145–152. [Google Scholar] [CrossRef]
- Kumari, B.; Gupta, N. Impact of Sensing Element Coupled to Lambda Diode Based Chaotic Circuit. Sens. Lett. 2017, 15, 570–574. [Google Scholar] [CrossRef]
- Karimov, T.; Antonovich, M.; Mashanin, A.; Yastrebkov, A.; Slizh, A. Synthesis of chaotic circuits with inductive elements based on 3rd order differential equations. In Proceedings of the IEEE Conference of Russian Young Researches in Electrical and Electronic Engineering (ElConRus), Saint Petersburg, Russia, 28–31 January 2019; pp. 89–92. [Google Scholar]
- Sprott, J. Some simple chaotic flows. Phys. Rev. E-Stat. Phys. Plasmas Fluids Relat. Interdiscip. Top. 1994, 50, 647–650. [Google Scholar] [CrossRef] [PubMed]
- WEBENCH Coil Designer. Available online: https://webench.ti.com/wb5/LDC/#/spirals (accessed on 2 July 2019).
- Jiao, D.; Ni, L.; Zhu, X.; Zhe, J.; Zhao, Z.; Lyu, Y.; Liu, Z. Measuring Gaps Using Planar Inductive Sensors Based on Calculating Mutual Inductance. Sens. Actuators A Phys. 2019, 295, 59–69. [Google Scholar] [CrossRef]
- He, B.; Yang, C.J.; Zhou, Y.; Chen, Y. Using chaos to improve measurement precision. J. Zhejiang Univ. Sci. A 2002, 3, 47–51. [Google Scholar] [CrossRef]
- Teodorescu, H.L. Sensors based on nonlinear dynamic systems—A survey. In Proceedings of the International Conference on Applied Electronics (AE), Pilsen, Czech Republic, 5–6 September 2017; pp. 1–10. [Google Scholar]
- Omron. Ultra-Long Sensing-Distance Proximity Sensor. Available online: http://www.ia.omron.com/products/family/479/download/catalog.html (accessed on 2 July 2019).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target | Distance (cm) |
|---|---|
| Steel plate Ø = 150 mm | 16 |
| Copper plate 100 mm × 70 mm × 0.018 mm | 9 |
| Steel scale calibration weight 50 g | 3 |
| Silver ring Ø = 19 mm | 3 |
| Sensor | Max. Range/Coil Width |
|---|---|
| Cylinder coil and mixed analog–digital unit [4] | 0.66 |
| On-the-shelf sensor OMRON TL-L [20] | 1 |
| Multilayer PCB coil and ECS75 conditioner [3] | 1 |
| LTCC planar coil and TI LDC1000 chip [1] | 1.26 |
| Current study | 1.77 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karimov, T.; Nepomuceno, E.G.; Druzhina, O.; Karimov, A.; Butusov, D. Chaotic Oscillators as Inductive Sensors: Theory and Practice. Sensors 2019, 19, 4314. https://doi.org/10.3390/s19194314
Karimov T, Nepomuceno EG, Druzhina O, Karimov A, Butusov D. Chaotic Oscillators as Inductive Sensors: Theory and Practice. Sensors. 2019; 19(19):4314. https://doi.org/10.3390/s19194314
Chicago/Turabian StyleKarimov, Timur, Erivelton Geraldo Nepomuceno, Olga Druzhina, Artur Karimov, and Denis Butusov. 2019. "Chaotic Oscillators as Inductive Sensors: Theory and Practice" Sensors 19, no. 19: 4314. https://doi.org/10.3390/s19194314
APA StyleKarimov, T., Nepomuceno, E. G., Druzhina, O., Karimov, A., & Butusov, D. (2019). Chaotic Oscillators as Inductive Sensors: Theory and Practice. Sensors, 19(19), 4314. https://doi.org/10.3390/s19194314