Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation
2.1. The Augmented State Motion Model with Delay
2.2. Measurement Model with Delay
3. Cooperative Localization with Communication Delays
| Algorithm 1: The cooperative localization algorithm based on State Estimation Error Compensation |
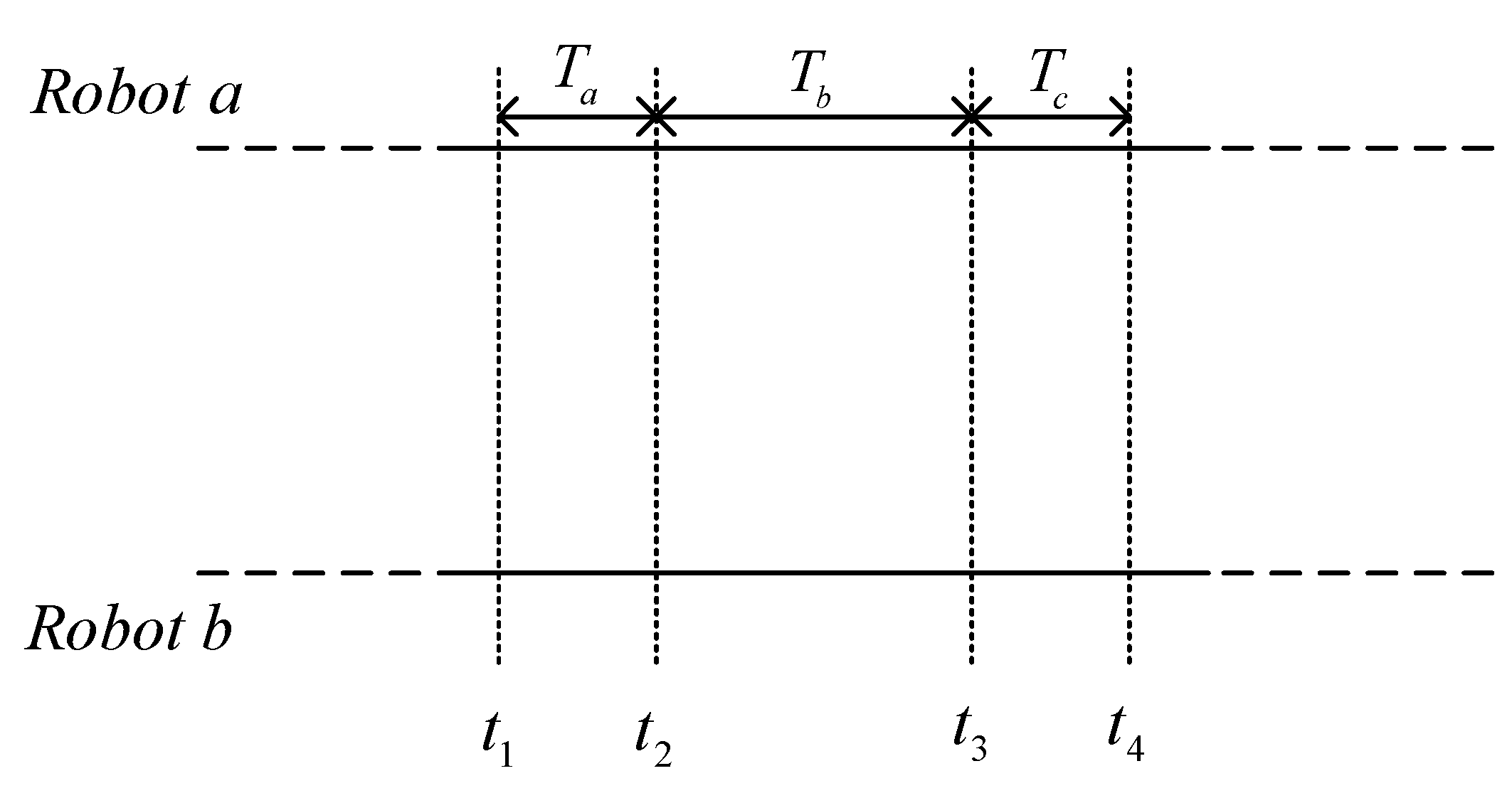
| 1:Initialize: Assume that each robot in the system initially knows its pose with respect to a given reference coordinate frame. As Figure 1 shows, consider that at time , the follower robot receives the pose information from the leader robot with time delay after Kalman filters at time . 2: State prediction and compensation: Give the one-step state prediction and covariance matrix: 3: Calculate the state estimation error compensation: 4: Compute the filter gain: 5: Construct the error-state propagation equation and the covariance propagation equation: 6:end |
4. Simulation Analysis
4.1. Setup
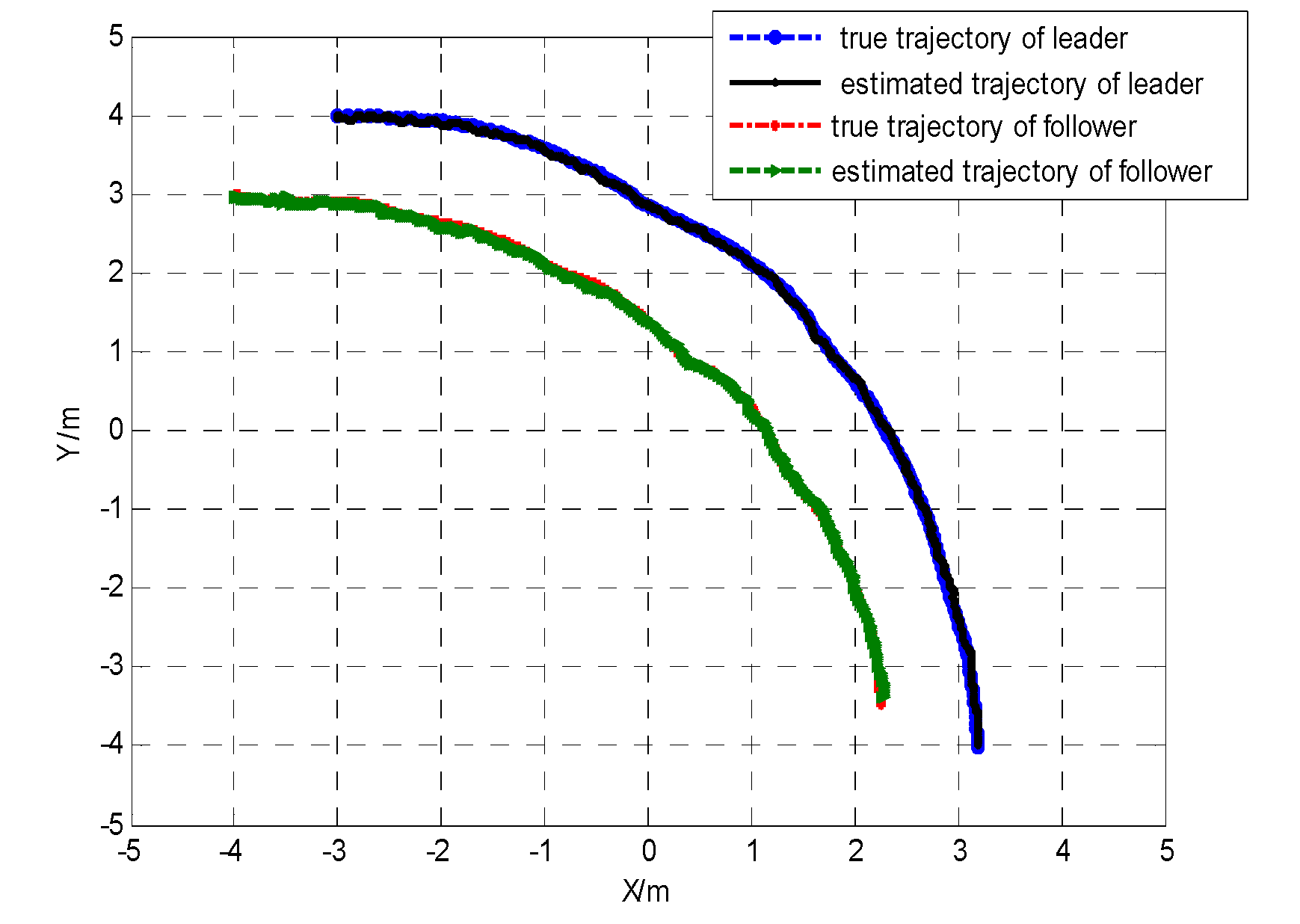
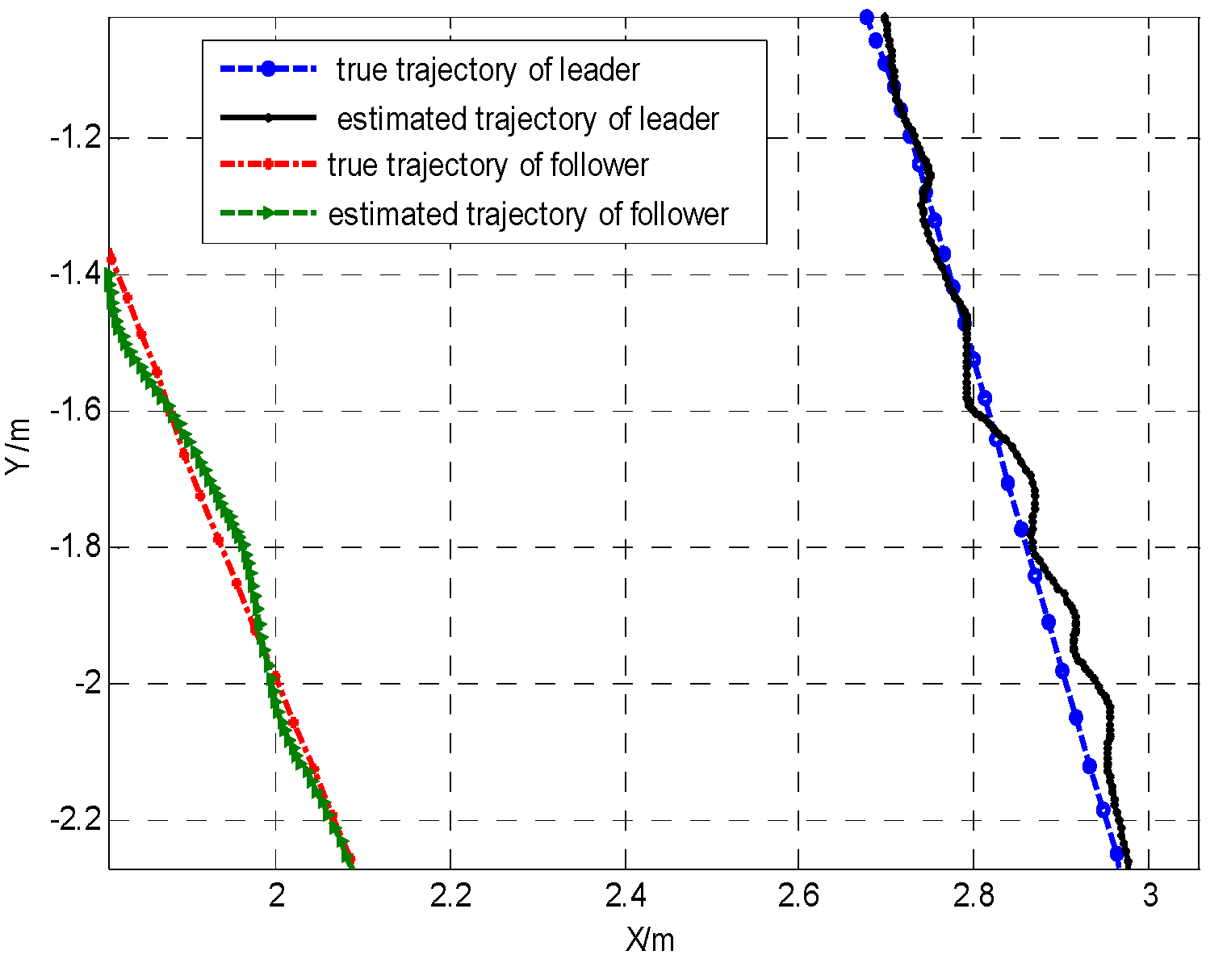
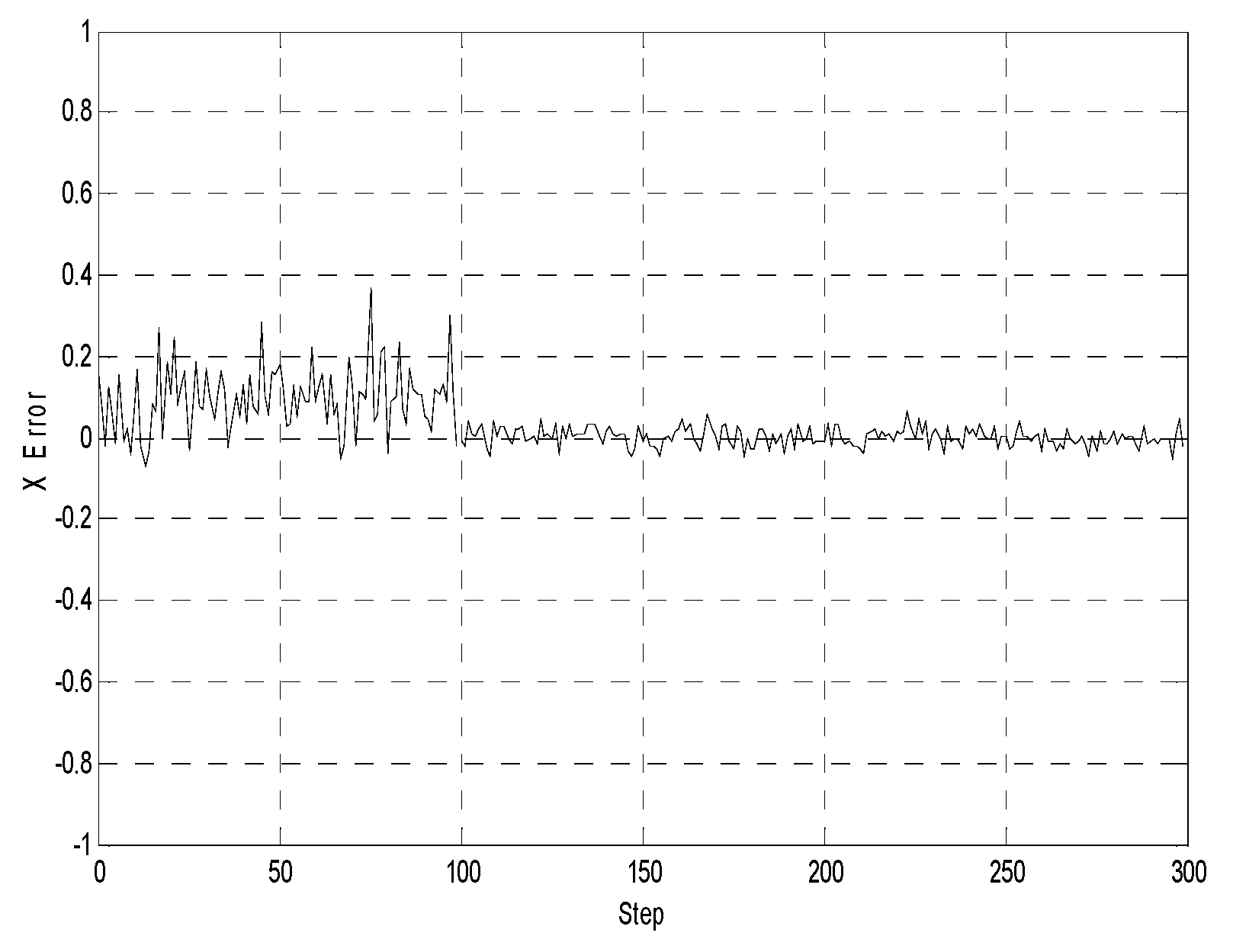
4.2. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Stroupe, A.W.; Martin, M.C.; Balch, T. Distributed Sensor Fusion for Object Position Estimation by Multi-Robot Systems. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; pp. 1092–1098. [Google Scholar]
- Soto, C.; Song, B.; Chowdhury, A.K. Distributed Multi-Target Tracking in a Self-Configuring Camera Network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 1486–1493. [Google Scholar]
- Oyekan, J.; Hu, H. Ant Robotic Swarm for Visualizing Invisible Hazardous Substances. Robotics 2013, 2, 1–18. [Google Scholar] [CrossRef]
- Parker, L.E. Distributed Algorithms for Multi-Robot Observation of Multiple Moving Targets. Auton. Robot. 2012, 12, 231–255. [Google Scholar] [CrossRef]
- Delle, F.; Canu, S.; Iocchi, L. Multi-Objective Multi-Robot Surveillance. In Proceedings of the 4th International Conference on Autonomous Robots and Agents, Wellington, New Zealand, 10–12 February 2009; pp. 68–73. [Google Scholar]
- Karakaya, M. Collaborative Localization in Visual Sensor Networks. ACM Trans. Sens. Netw. 2018, 10, 1–24. [Google Scholar] [CrossRef]
- Dong, W. Tracking Control of Multiple-Wheeled Mobile Robots with Limited Information of a Desired Trajectory. IEEE Trans. Robot. 2012, 28, 262–268. [Google Scholar] [CrossRef]
- Dong, W.; Chen, C.; Xing, Y. Distributed Estimation-Based Tracking Control of Multiple Uncertain Non-Linear Systems. Int. J. Syst. Sci. 2017, 45, 2088–2099. [Google Scholar] [CrossRef]
- Wang, X.; Sekercioglu, Y.; Drummond, T. Vision-Based Cooperative Pose Estimation for Localization in Multi-Robot Systems Equipped with RGB-D Cameras. Robotics 2018, 4, 1–22. [Google Scholar] [CrossRef]
- Kurazume, R.; Nagata, S.; Hirose, S. Cooperative Positioning with Multiple Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 1250–1257. [Google Scholar]
- Martinelli, A. Improving the Precision on Multi Robot Localization by Using a Series of Filters Hierarchically Distributed. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2017; pp. 1053–1058. [Google Scholar]
- Trawny, N.; Barfoot, T. Optimized Motion Strategies for Cooperative Localization of Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1027–1032. [Google Scholar]
- Caglioti, V.; Citterio, A.; Fossati, A. Cooperative, Distributed Localization in Multi-Robot Systems: A Minimum-Entropy Approach. In Proceedings of the IEEE Workshop on Distributed Intelligent Systems, Prague, Czech Republic, 15–16 June 2016; pp. 25–30. [Google Scholar]
- Roumeliotis, S.; Rekleitis, I. Propagation of Uncertainty in Cooperative Multirobot Localization: Analysis and Experimental Results. Auton. Robot. 2004, 17, 41–54. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Kruppa, H.; Thrun, S. A Probabilistic Approach to Collaborative Multi-Robot Localization. Auton. Robot. 2000, 8, 325–344. [Google Scholar] [CrossRef]
- Thrun, S.; Fox, D.; Burgard, W. Monte Carlo Localization with Mixture Proposal Distribution. In Proceedings of the AAAI National Conference Artificial Intelligence, Austin, TX, USA, 27–30 July 2000; pp. 859–865. [Google Scholar]
- Du, G.; Zhang, P. Markerless Human-Robot Interface Using Particle Filter and Kalman Filter for Dual Robots. IEEE Trans. Ind. Electron. 2015, 62, 2257–2264. [Google Scholar] [CrossRef]
- Du, G.; Zhang, P.; Liu, X. Markerless Human–Manipulator Interface Using Leap Motion with Interval Kalman Filter and Improved Particle Filter. IEEE Trans. Ind. Inf. 2017, 12, 694–704. [Google Scholar] [CrossRef]
- Du, G.; Zhang, P.; Li, D. Human–Manipulator Interface Based on Multisensory Process via Kalman Filters. IEEE Trans. Ind. Electron. 2014, 61, 5411–5418. [Google Scholar]
- Schenato, L. Optimal Estimation in Networked Control Systems Subject to Random Delay and Packed Drop. IEEE Trans. Autom. Control 2008, 53, 1311–1317. [Google Scholar] [CrossRef]
- Skrjanc, I.; Blazic, S. Predictive Functional Control Based on Fuzzy Model: Design and Stability Study. J. Intell. Robot. Syst. 2005, 43, 283–299. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, H.S.; Wang, W. Kalman Filtering for Multiple Time-Delay Systems. Automatica 2005, 41, 1455–1461. [Google Scholar]
- Pozna, C.; Precup, R.E.; József, K.; Krjanc, I.; Preitl, S. New Results in Modelling Derived from Bayesian Filtering. Knowl. Based Syst. 2010, 23, 182–194. [Google Scholar] [CrossRef]
- Sarma, K.K. Neural Network Based Feature Extraction for Assamese Character and Numeral Recognition. Int. J. Artif. Intell. 2009, 2, 37–56. [Google Scholar]
- Vrkalovic, S.; Lunca, E.C.; Borlea, I.D. Model-Free Sliding Mode and Fuzzy Controllers for Reverse Osmosis Desalination Plants. Int. J. Artif. Intell. 2018, 16, 208–222. [Google Scholar]
- Phung, M.D.; Van Nguyen, T.T.; Tran, T.H.; Tran, Q.V. Localization of Networked Robot Systems Subject to Random Delay and Packet Loss. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2016; pp. 1442–1447. [Google Scholar]
- Cognetti, M.; Salaris, P.; Giordano, P.R. Optimal Active Sensing with Process and Measurement Noise. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018. [Google Scholar]
- Stegagno, P.; Cognetti, M.; Oriolo, G.; Bülthoff, H.H.; Franchi, A. Ground and Aerial Mutual Localization using Anonymous Relative-Bearing Measurements. IEEE Trans. Robot. 2016, 32, 1133–1151. [Google Scholar] [CrossRef]
- Yao, Y.; Xu, D.; Yan, W.; Gao, B. Optimal Decision Making for Cooperative Localization of MAUVs. In Proceedings of the IEEE Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2018; pp. 1135–1142. [Google Scholar]
- Yao, Y.; Xu, D.; Yan, W. Cooperative Localization with Communication Delays for MAUVs. In Proceedings of the IEEE Conference on Intelligence Computing and Intelligent Systems, Shanghai, China, 20–22 November 2009; pp. 2143–2148. [Google Scholar]








© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Cao, Y. Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation. Sensors 2019, 19, 3842. https://doi.org/10.3390/s19183842
Zhang S, Cao Y. Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation. Sensors. 2019; 19(18):3842. https://doi.org/10.3390/s19183842
Chicago/Turabian StyleZhang, Shijie, and Yi Cao. 2019. "Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation" Sensors 19, no. 18: 3842. https://doi.org/10.3390/s19183842
APA StyleZhang, S., & Cao, Y. (2019). Cooperative Localization Approach for Multi-Robot Systems Based on State Estimation Error Compensation. Sensors, 19(18), 3842. https://doi.org/10.3390/s19183842