A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching

Abstract
1. Introduction
2. Materials and Methods
2.1. Participants
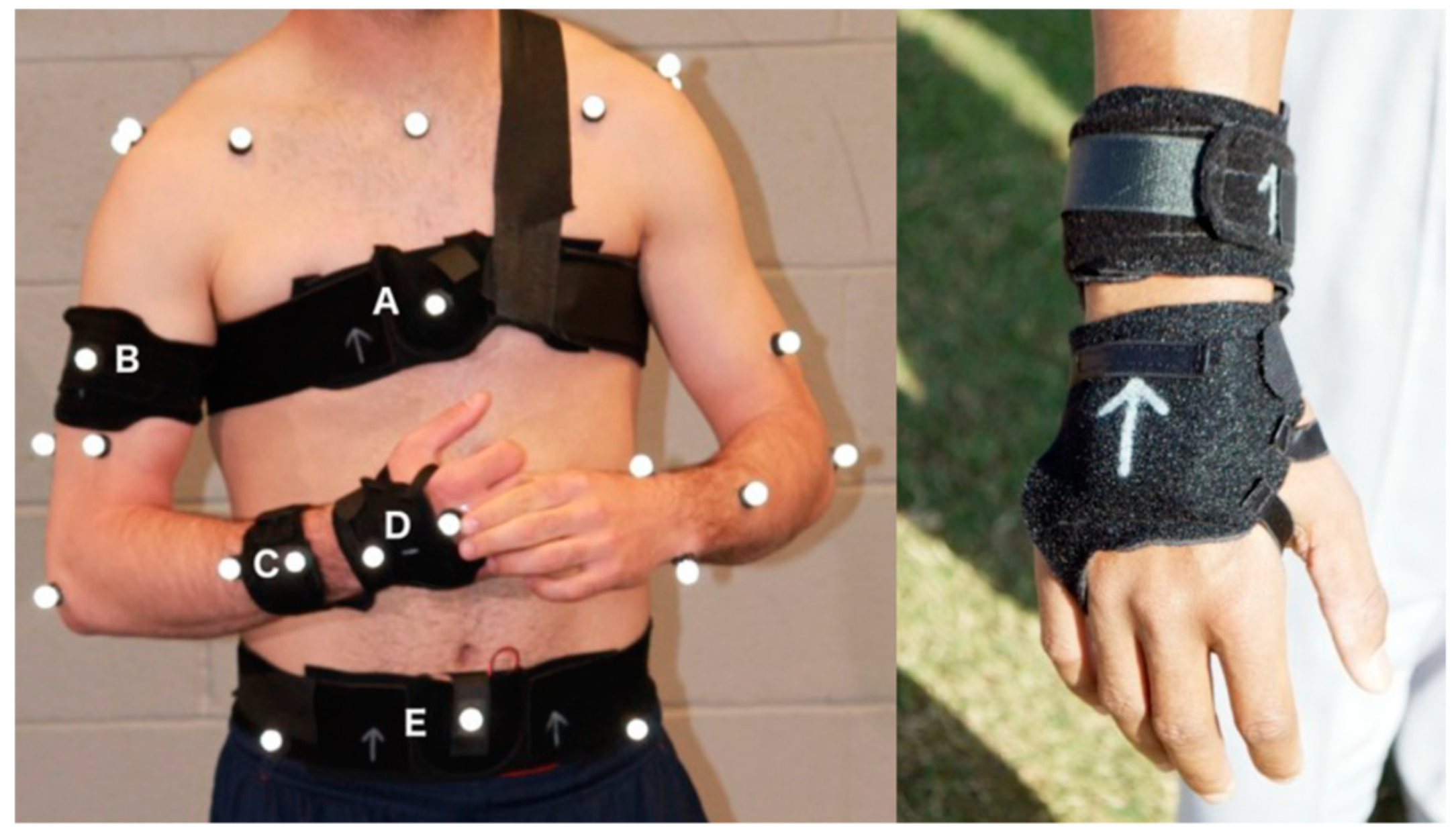
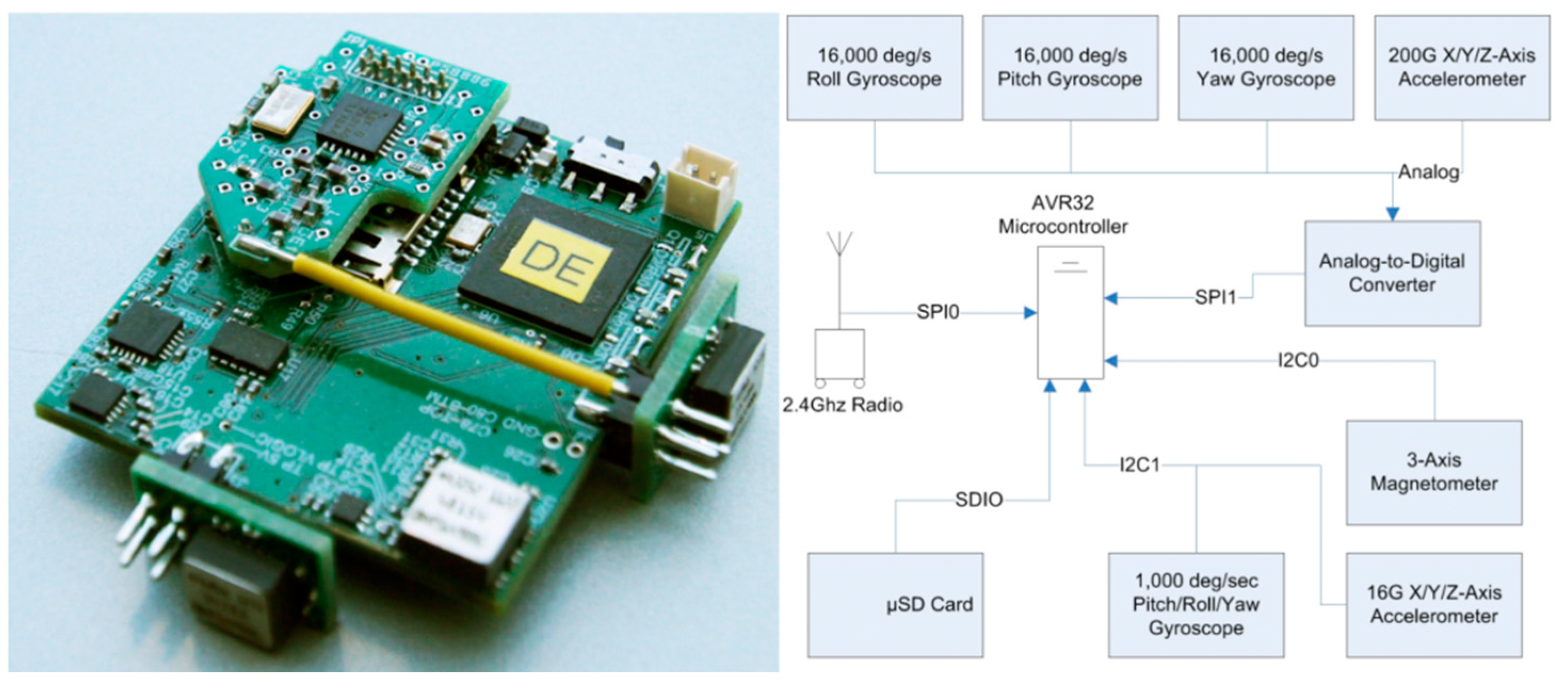
2.2. Wearable Sensor Hardware and Software
2.3. Optical 3D Motion Capture System Hardware and Software
2.4. Data Analysis
3. Results
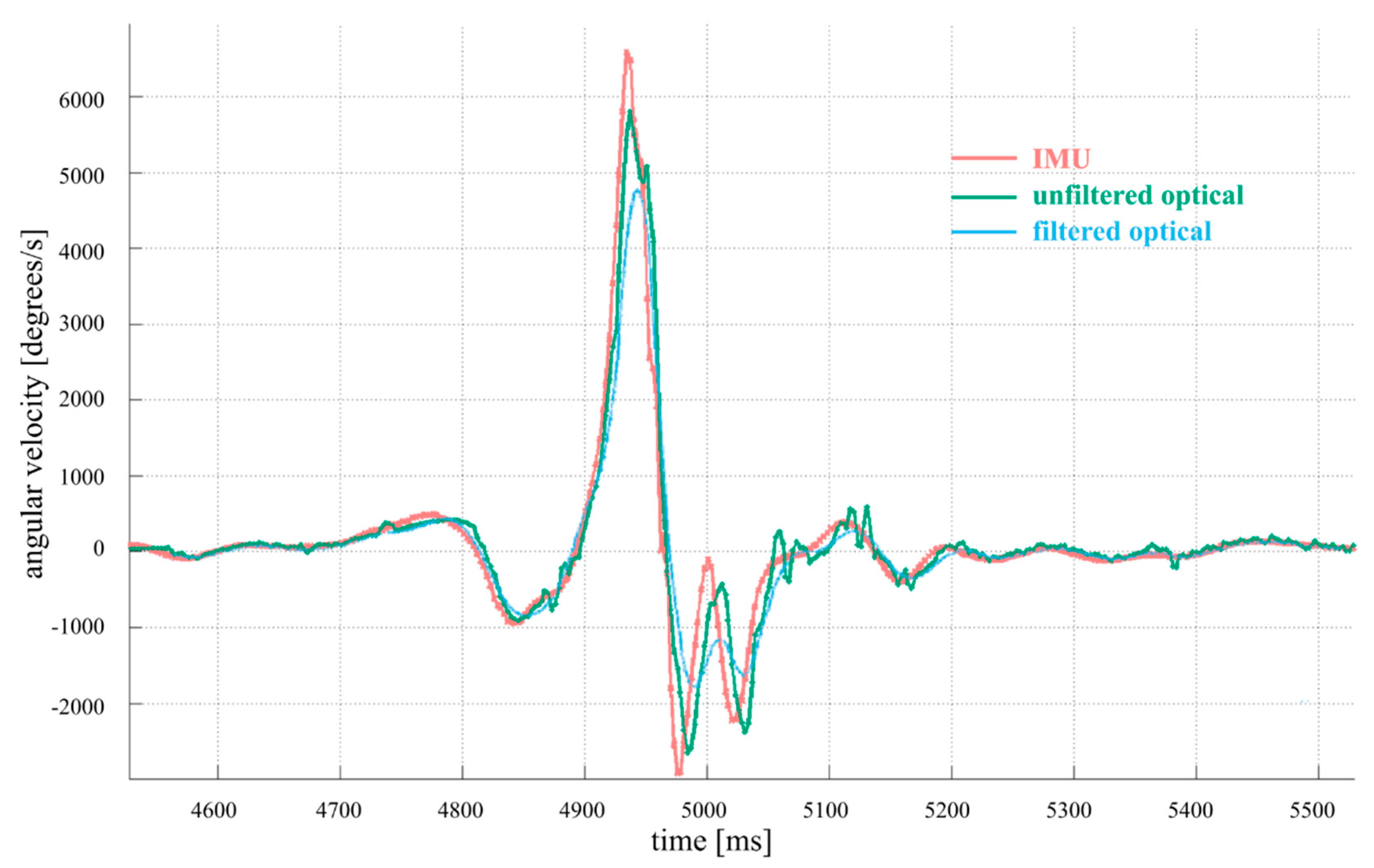
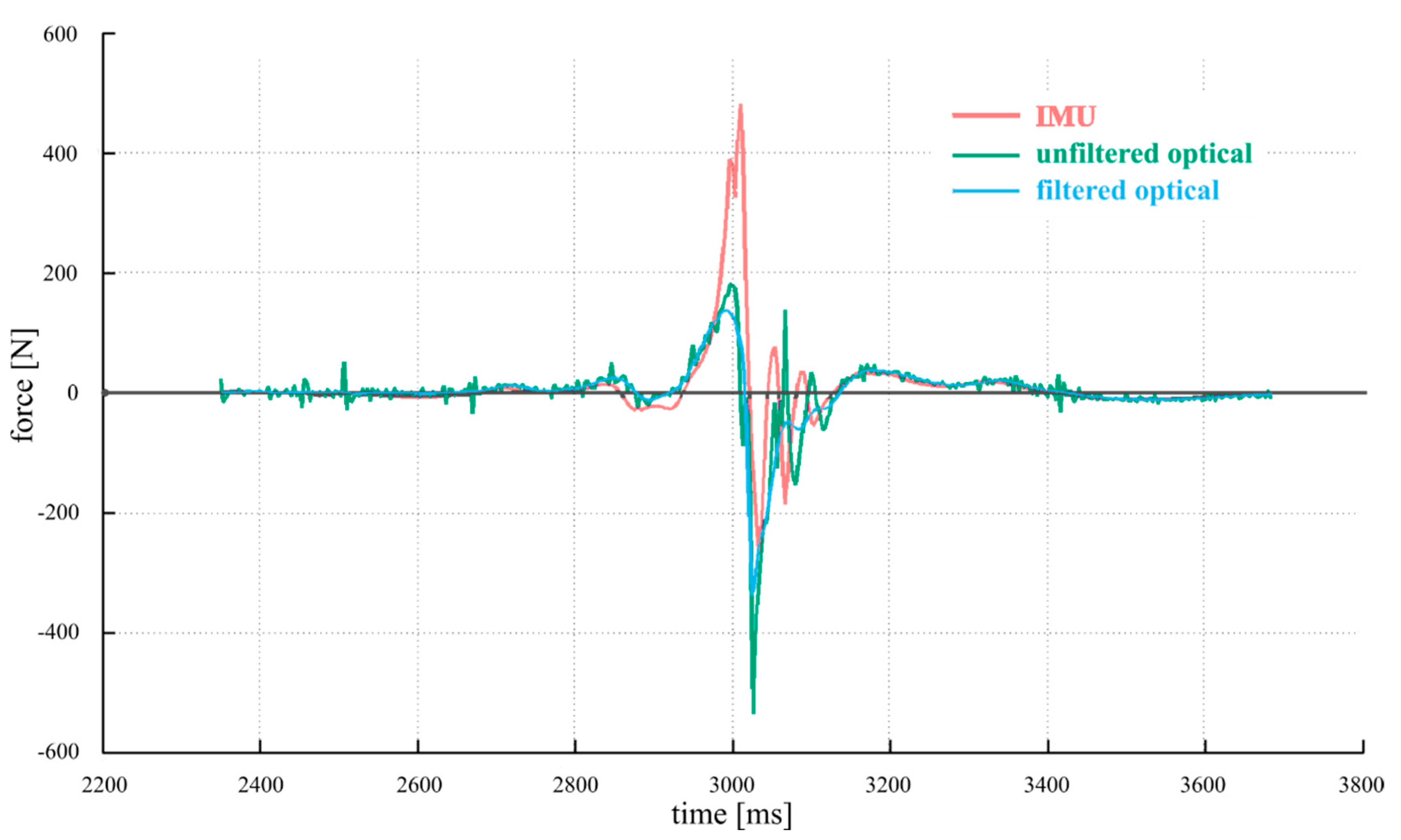
3.1. Qualitative Comparison of Data from the Multimodal IMU System and the Optical System
3.2. Elbow Valgus Loading and Shoulder Distraction Forces
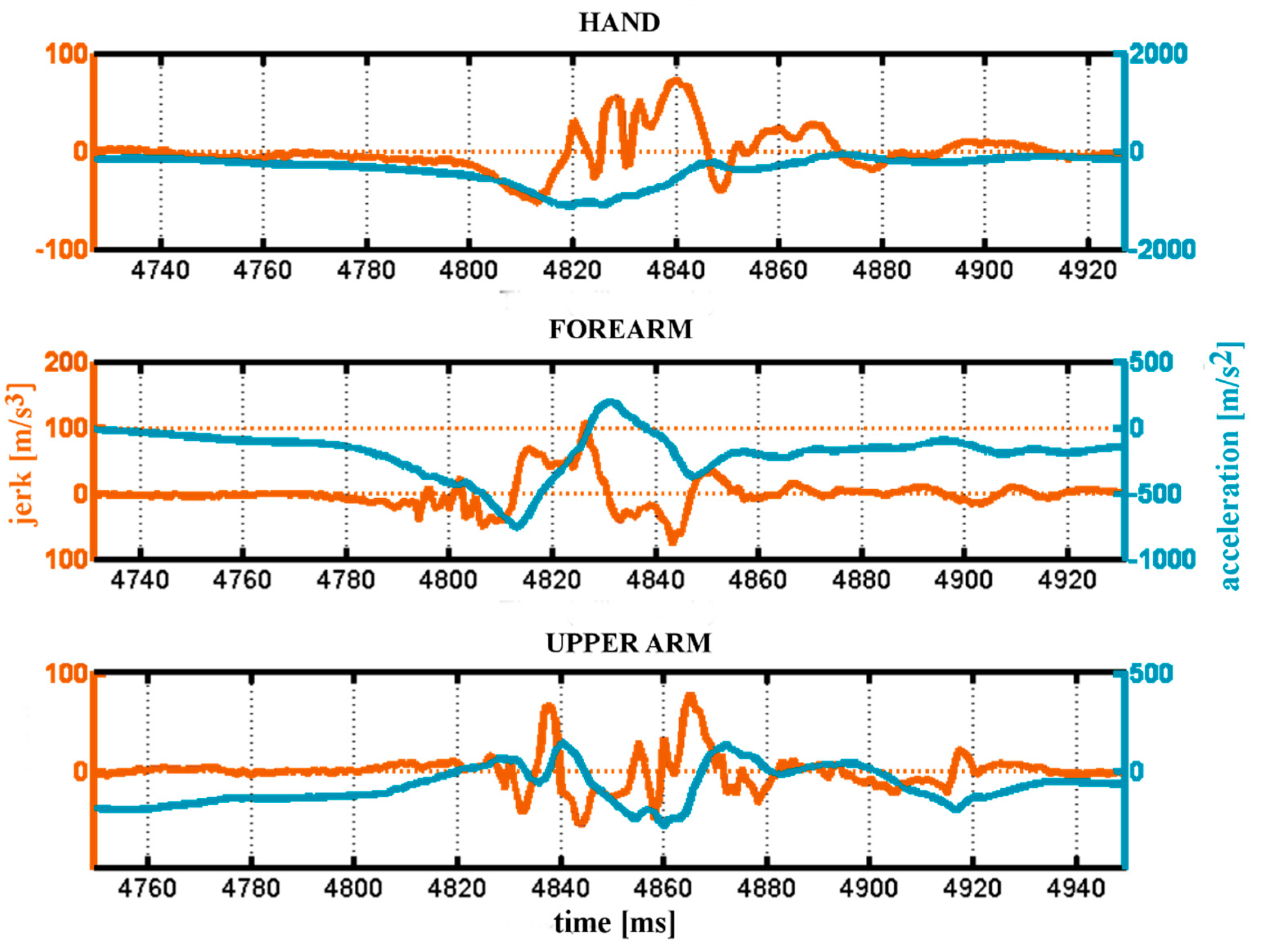
3.3. Jerk
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Fleisig, G.S.; Andrews, J.R. Prevention of Elbow Injuries in Youth Baseball Pitchers. Sports Health 2012, 4, 419–424. [Google Scholar] [CrossRef]
- Posner, M.; Cameron, K.L.; Wolf, J.M.; Belmont, P.J., Jr.; Owens, B.D. Epidemiology of Major League Baseball Injuries. Am. J. Sports Med. 2011, 39, 1676–1680. [Google Scholar] [CrossRef]
- Carroll, W. The Alarming Increase in MLB Pitchers Who’ve Had Tommy John Surgery. 2013. Available online: https://bleacherreport.com/articles/1699659-the-alarming-increase-in-mlb-pitchers-whove-had-tommy-john-surgery (accessed on 27 February 2019).
- Rechel, J.A.; Collins, C.A.; Comstock, R.D. Epidemiology of Injuries Requiring Surgery Among High School Athletes in the United States 2005 to 2010. Trauma 2011, 71, 982–989. [Google Scholar] [CrossRef]
- Calabrese, G.J. Pitching mechanics, revisited. Int. J. Sports Phys. Ther. 2013, 8, 652–660. [Google Scholar]
- Chalmers, P.N.; Erickson, B.J.; D’Angelo, J.; Ma, K.; Romeo, A.A. Epidemiology of Shoulder Surgery Among Professional Baseball Players. Am. J. Sports Med. 2019, 47, 1068–1073. [Google Scholar] [CrossRef]
- Anz, A.W.; Bushnell, B.D.; Griffin, L.P.; Noonan, T.J.; Torry, M.R.; Hawkins, R.J. Correlation of torque and elbow injury in professional baseball pitchers. Am. J. Sports Med. 2010, 38, 1368–1374. [Google Scholar] [CrossRef]
- Braun, S.; Kokmeyer, D.; Millett, P.J. Shoulder injuries in the throwing athlete. JBJS 2009, 91, 966–978. [Google Scholar] [CrossRef]
- Putnam, C. A Sequential motions of body segments in striking and throwing skills: Descriptions and explanations. J. Biomech. 1993, 26 (Suppl. 1), 125–135. [Google Scholar] [CrossRef]
- Scarborough, D.M.; Bassett, A.J.; Mayer, L.W.; Berkson, E.M. Kinematic sequence patterns in the overhead baseball pitch. Sports Biomech. 2018, 14, 1–18. [Google Scholar] [CrossRef]
- Fleisig, G.S.; Andrews, J.R.; Dillman, C.J.; Escamilla, R.F. Kinetics of Baseball Pitching with Implications About Injury Mechanisms. Am. J. Sports Med. 1995, 23, 233–239. [Google Scholar] [CrossRef]
- Waltz, E. Rocky Start for Wearables in Professional Sports Games. IEEE Spectrum Online. (Human OS Blog). 15 August 2016. Available online: https://spectrum.ieee.org/the-human-os/biomedical/devices/rocky-start-to-wearables-in-professional-sports (accessed on 20 August 2019).
- Lightman, K. Silicon Gets Sporty. IEEE Spectr. 2016, 53, 48–53. [Google Scholar] [CrossRef]
- Fleisig, G.S. Editorial Commentary: Changing Times in Sports Biomechanics: Baseball Pitching Injuries and Emerging Wearable Technology. Arthroscopy 2018, 34, 823–824. [Google Scholar] [CrossRef] [PubMed]
- Vicon Website. Available online: http://www.vicon.com (accessed on 27 February 2019).
- Qualysis Website. Available online: http://www.qualisys.com (accessed on 27 February 2019).
- Choppin, S.; Wheat, J. The potential of the Microsoft Kinect in sports analysis and biomechanics. Sports Technol. 2013, 6, 78–85. [Google Scholar] [CrossRef]
- Raab, F.H.; Blood, E.B.; Steiner, T.O.; Jones, H.R. Magnetic Position and Orientation Tracking System. IEEE Trans. Aerosp. Electron. Syst. 1979, 5, 709–718. [Google Scholar] [CrossRef]
- Cousins, S.J.; Hannah, R.E.; Foort, J. A clinically viable electrogoniometer. In Proceedings of the 2nd Annual Interagency Conference on Rehabilitation Engineering, Atlanta, GA, USA, 26–31 August 1979. [Google Scholar]
- Danisch, L.A. Patented Measurand Fiber Optic Sensors: Overview and Background Information. White Paper. 25 May 1995. Available online: http://www.shapewrap.com/shapewrap.html (accessed on 15 March 2019).
- Suh, M. Wearable Sensors for Athletes. In Electronic Textiles—Smart Fabrics and Wearable Technology; Dias, T., Ed.; Woodhead Publishing Series in Textiles: Number 166; Elsevier: Amsterdam, The Netherlands, 2015; Chapter 12; pp. 257–274. [Google Scholar]
- Sawchik, T. Plethora of New Tools Shows Analytics’ Growth in MLB. TRIB Live, 26 March 2015. Available online: http://triblive.com/sports/pirates/9952324-74/pirates-analytics-tools (accessed on 27 February 2019).
- Baard, M. Northeastern’s Smart Shirt Aims to Prevent Pitcher’s Elbow. The Boston Globe, 1 March 2010; p. B5. Available online: http://archive.boston.com/business/technology/articles/2010/03/01/northeasterns_smart_shirt_aims_to_prevent_pitchers_elbow/ (accessed on 16 August 2019).
- Xsens Technologies Website. Available online: http://www.xsens.com (accessed on 27 February 2019).
- Synertial UK Ltd. IGS Motion Cobra Suit Website. 2017. Available online: https://synertial.com/products/suits/ (accessed on 27 February 2019).
- Motus Global. Motus Baseball. Available online: http://motusglobal.com/motusbaseball.html (accessed on 27 February 2019).
- Camp, C.L.; Tubbs, T.G.; Fleisig, G.S.; Dines, J.S.; Dines, D.M.; Altchek, D.W.; Dowling, B. The Relationship of Throwing Arm Mechanics and Elbow Varus Torque: Within-Subject Variation for Professional Baseball Pitchers across 82,000 Throws. Am. J. Sports Med. 2017, 45, 3030–3035. [Google Scholar] [CrossRef] [PubMed]
- Figur8 Website. Available online: https://www.figur8.me/ (accessed on 27 February 2019).
- Weiser, M. The Computer for the 21st Century. Sci. Am. 1991, 265, 94–104. [Google Scholar] [CrossRef]
- Morris, I. Accelerometry—A Technique for the Measurement of Human Body Movements. J. Biomech. 1973, 6, 729–736. [Google Scholar] [CrossRef]
- Great Lakes Neurotechnologies. Continuous Parkinson’s Monitoring Using Wearables & App. Available online: http://glneurotech.com/kinesia/products/kinesia-360/ (accessed on 14 August 2017).
- Young, A.D.; Ling, M.J.; Arvind, D.K. Orient-2: A realtime wireless posture tracking system using local orientation estimation. In Proceedings of the 4th Workshop on Embedded Networked Sensors (EmNets ‘07), Cork, Ireland, 25–26 June 2007; ACM: New York, NY, USA, 2007; pp. 53–57. [Google Scholar]
- Comotti, D.; Ermidoro, M.; Galizzi, M.; Vitali, A. Development of a Wireless Low-Power Multi-Sensor Network for Motion Tracking Applications. In Proceedings of the 2013 IEEE International Conference on Body Sensor Networks, Cambridge, MA, USA, 6–9 May 2013. [Google Scholar]
- Arvind, D.K.; Bates, C.A. The Speckled Golfer. In Proceedings of the ICST 3rd International Conference on Body Area Networks, Tempe, AZ, USA, 13–17 March 2008. [Google Scholar]
- Arvind, D.K.; Valtazanos, A. Speckled Tango Dancers: Real-Time Motion Capture of Two-Body Interactions Using On-body Wireless Sensor Networks. In Proceedings of the Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; pp. 312–317. [Google Scholar]
- Sports Sensing Website. Available online: http://www.sports-sensing.com/products/sensor/dspms.html (accessed on 15 August 2017).
- Khan, A.; Nicholson, J.; Plotz, T. Activity Recognition for Quality Assessment of Batting Shots in Cricket using a Hierarchical Representation. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 62. [Google Scholar] [CrossRef]
- Picerno, P. 25 years of lower limb joint kinematics by using inertial and magnetic sensors: A review of methodological approaches. Gait Posture 2017, 51, 239–246. [Google Scholar] [CrossRef]
- Iosa, M.; Picerno, P.; Paolucci, S.; Morone, G. Wearable inertial sensors for human movement analysis. Expert Rev. Med. Devices 2016, 13, 641–659. [Google Scholar] [CrossRef]
- Fong, D.T.; Chan, Y.Y. The use of wearable inertial motion sensors in human lower limb biomechanics studies: A systematic review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends Supporting the In-Field Use of Wearable Inertial Sensors for Sport Performance Evaluation: A Systematic Review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Colyer, S.L. A Review of the Evolution of Vision-Based Motion Analysis and the Integration of Advanced Computer Vision Methods towards Developing a Markerless System. Sports Med. Open 2018, 4, 24. [Google Scholar] [CrossRef] [PubMed]
- Kleppner, D.; Kolenkow, R. An Introduction to Mechanics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Oyama, S. Baseball pitching kinematics, joint loads, and injury prevention. J. Sport Health Sci. 2012, 1, 80–91. [Google Scholar] [CrossRef]
- Fleisig, G.S.; Barrentine, S.W.; Zheng, N.; Escamilla, R.F.; Andrews, J.R. Kinematic and kinetic comparison of baseball pitching among various levels of development. J. Biomech. 1999, 32, 1371–1375. [Google Scholar] [CrossRef]
- Lapinski, M. A Platform for High-Speed Biomechanical Data Analysis Using Wearable Wireless Sensors. Ph.D. Dissertation, MIT, Cambridge, MA, USA, 2013. [Google Scholar]
- Aylward, R.; Paradiso, J.A. A Compact, High-Speed, Wearable Sensor Network for Biomotion Capture and Interactive Media. In Proceedings of the Sixth International IEEE/ACM Conference on Information Processing in Sensor Networks (IPSN 07), Cambridge, MA, USA, 25–27 April 2007; pp. 380–389. [Google Scholar]
- Paradiso, J.A.; Hsiao, K.Y.; Benbasat, A.Y.; Teegarden, Z. Design and Implementation of Expressive Footwear. IBM Syst. J. 2000, 39, 511–529. [Google Scholar] [CrossRef]
- Bamberg, S.J.M.; Benbasat, A.Y.; Scarborough, D.M.; Krebs, D.E.; Paradiso, J.A. Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 413–423. [Google Scholar] [CrossRef] [PubMed]
- Lapinski, M.; Berkson, E.; Gill, T.; Reinold, M.; Paradiso, J.A. A Distributed Wearable, Wireless Sensor System for Evaluating Professional Baseball Pitchers and Batters. In Proceedings of the IEEE International Symposium on Wearable Computers (ISWC 2009), Linz, Austria, 4–7 September 2019; pp. 131–138. [Google Scholar]
- Lapinski, M.; Feldmeier, M.; Paradiso, J.A. Wearable Wireless Sensing for Sports and Ubiquitous Interactivity. In Proceedings of the 2011 IEEE SENSORS Conference, Limerick, Ireland, 28–31 October 2011. [Google Scholar]
- Berkson, E.; Aylward, R.; Zachazewski, J.; Paradiso, J.; Gill, T. IMU arrays: The biomechanics of baseball pitching. Orthop. J. Harv. Med. Sch. 2007, 8, 90–94. [Google Scholar]
- Lapinski, M. A Wearable, Wireless Sensor System for Sports Medicine. Master’s Dissertation, MIT, Cambridge, MA, USA, 2008. [Google Scholar]
- Hamill, J.; Selbie, W.S.; Kepple, T. Three-Dimensional Kinetics. In Research Methods in Biomechanics, 2nd ed.; Robertson, G.E., Caldwell, G.E., Hamill, J., Kamen, G., Whittlesey, S., Eds.; Human Kinetics: Champaign, IL, USA, 2013. [Google Scholar]
- Meskers, C.G.M.; Van der Helm, F.C.; Rozendaal, L.A.; Rozing, P.M. In vivo estimation of the glenohumeral joint rotation center from scapular bony landmarks by linear regression. J. Biomech. 1997, 31, 93–96. [Google Scholar] [CrossRef]
- Wu, G.; Van der Helm, F.C.; Veeger, H.D.; Makhsous, M.; Van Roy, P.; Anglin, C.; Nagels, J.; Karduna, A.R.; McQuade, K.; Wang, X.; et al. ISB recommendation on definitions of joint coordinate systems of various joints for the reporting of human joint motion—Part II: Shoulder, elbow, wrist and hand. J. Biomech. 2005, 38, 981–992. [Google Scholar] [CrossRef]
- Aguinaldo, A.L.; Buttermore, J.; Chambers, H. Effects of Upper Trunk Rotation on Shoulder Joint Torque Among Baseball Pitchers of Various Levels. J. Appl. Biomech. 2007, 23, 42–51. [Google Scholar] [CrossRef] [PubMed]
- Stodden, D.F.; Fleisig, G.S.; McLean, S.P.; Lyman, S.L.; Andrews, J.R. Relationship of Pelvis and Upper Torso Kinematics to Pitched Baseball. J. Appl. Biomech. 2001, 17, 164–172. [Google Scholar] [CrossRef]
- Milewski, M.D.; Õunpuu, S.; Solomito, M.; Westwell, M.; Nissen, C.W. Adolescent Baseball Pitching Technique: Lower Extremity Biomechanical Analysis. J. Appl. Biomech. 2012, 28, 491–501. [Google Scholar] [CrossRef] [PubMed]
- Aguinaldo, A.L.; Chambers, H. Correlation of Throwing Mechanics with Elbow Valgus Load in Adult Baseball Pitchers. Am. J. Sports Med. 2009, 37, 2043–2048. [Google Scholar] [CrossRef] [PubMed]
- Burkhart, T.A.; Dunning, C.E.; Andrews, D.M. Determining the optimal system-specific cut-off frequencies for filtering in-vitro upper extremity impact force and acceleration data by residual analysis. J. Biomech. 2011, 44, 728–731. [Google Scholar] [CrossRef] [PubMed]
- C-Motion Website. Available online: https://www.c-motion.com/products/visual3d (accessed on 27 February 2019).
- Medeiros, C.B. Investigating Soft Tissue Artifact in Baseball Pitch. 2014. Available online: www.carolinabrum.com/baseball (accessed on 27 February 2019).
- Fleisig, G.S.; Escamilla, R.F.; Andrews, J.R. Applied Biomechanics of Baseball Pitching. In Athletic and Sport Issues in Musculoskeletal Rehabilitation; Elsevier Saunders: St. Louis, MO, USA, 2011; pp. 350–384. [Google Scholar]
- Leardini, A. Human movement analysis using stereophotogrammetry. Part 3: Soft tissue artifact assessment and compensation. Gait Posture 2005, 21, 212–225. [Google Scholar] [CrossRef]
- Karlsson, D.; Lundberg, A. Accuracy estimation of kinematic data derived from bone anchored external markers. In Proceedings of the 3rd International Symposium on 3D Analytical Human Movement, Stockholm, Sweden, 4–8 July 1994. [Google Scholar]
- Cutti, A.G.; Cappello, A.; Davalli, A. A new technique for compensating the soft tissue artefact at the upper-arm: In vitro validation. J. Mech. Med. Biol. 2005, 5, 333–347. [Google Scholar] [CrossRef]
- Cutti, A.G.; Cappello, A.; Davalli, A. In vivo validation of a new technique that compensates for soft tissue artifact in the upper-arm: Preliminary results. Clin. Biomech. 2006, 21, S13–S19. [Google Scholar] [CrossRef] [PubMed]
- Cerveri, P.; Pedotti, A.; Ferrigno, G. Kinematical models to reduce the effect of skin artifacts on marker-based human motion estimation. J. Biomech. 2004, 38, 2228–2236. [Google Scholar] [CrossRef]
- Medeiros, C.B.; Wanderley, M.M. Multiple-Model Linear Kalman Filter Framework for Unpredictable Signals. IEEE Sens. J. 2014, 14, 979–991. [Google Scholar] [CrossRef]
- Todorov, E. Probabilistic inference of multijoint movements, skeletal parameters and marker attachment from diverse motion capture data. IEEE Trans Biomed. Eng. 2007, 54, 1927–1939. [Google Scholar] [CrossRef] [PubMed]
- Buffi, J.; Murray, W. Effect of forearm posture on the elbow varus torque generated by the flexor pronator muscles: Implications for the ulnar collateral ligament. In Proceedings of the 37th Annual Meeting of the American Society of Biomechanics Conference, Omaha, NE, USA, 4–7 September 2013. [Google Scholar]
- Servati, A.; Zou, L.; Wang, Z.J.; Ko, F.; Servati, P. Novel Flexible Wearable Sensor Materials and Signal Processing for Vital Sign and Human Activity Monitoring. Sensors 2017, 17, 1622. [Google Scholar] [CrossRef] [PubMed]
- Nag, A.; Mukhopadhyay, S.C.; Kosel, J. Wearable Flexible Sensors: A Review. IEEE Sens. J. 2017, 17, 3949–3960. [Google Scholar] [CrossRef]
- Garlant, J.A.; Ammann, K.R.; Slepian, M.J. Stretchable Electronic Wearable Motion Sensors Delineate Signatures of Human Motion Tasks. ASAIO J. 2018, 64, 351–359. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pitcher | Pitch Type | Sample Size | Average Speed (km/h) | Average Peak Valgus Force (Nm) | Average Peak Distractive Force (N) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| IMU | Optical | Factor | p-value | IMU | Optical | Factor | p-value | ||||
| A | fastball | 33 | 124.4 | µ = 159.66 σ = 40.61 | µ = 100.22 σ = 7.17 | 1.59 | 0 | µ = 2994.62 σ = 345.88 | µ = 633.29 σ = 38.74 | 4.73 | 0 |
| change-up | 3 | 116.2 | µ = 108.76 σ = 1.56 | µ = 93.96 σ = 0.73 | 1.16 | 0 | µ = 2290.87 σ = 228.77 | µ = 628.08 σ = 17.69 | 3.65 | 0 | |
| B | fastball | 18 | 114.9 | µ = 75.84 σ = 22.67 | µ = 45.39 σ = 6.77 | 1.67 | 0 | µ = 812.79 σ = 90.90 | µ = 519.22 σ = 127.75 | 1.57 | 0 |
| change-up | 4 | 102 | µ = 97.57 σ = 20.68 | µ = 65.97 σ = 43.76 | 1.48 | 0.0871 | µ = 794.62 σ = 154.07 | µ = 444.90 σ = 63.80 | 1.79 | 0 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lapinski, M.; Brum Medeiros, C.; Moxley Scarborough, D.; Berkson, E.; Gill, T.J.; Kepple, T.; Paradiso, J.A. A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching. Sensors 2019, 19, 3637. https://doi.org/10.3390/s19173637
Lapinski M, Brum Medeiros C, Moxley Scarborough D, Berkson E, Gill TJ, Kepple T, Paradiso JA. A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching. Sensors. 2019; 19(17):3637. https://doi.org/10.3390/s19173637
Chicago/Turabian StyleLapinski, Michael, Carolina Brum Medeiros, Donna Moxley Scarborough, Eric Berkson, Thomas J. Gill, Thomas Kepple, and Joseph A. Paradiso. 2019. "A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching" Sensors 19, no. 17: 3637. https://doi.org/10.3390/s19173637
APA StyleLapinski, M., Brum Medeiros, C., Moxley Scarborough, D., Berkson, E., Gill, T. J., Kepple, T., & Paradiso, J. A. (2019). A Wide-Range, Wireless Wearable Inertial Motion Sensing System for Capturing Fast Athletic Biomechanics in Overhead Pitching. Sensors, 19(17), 3637. https://doi.org/10.3390/s19173637