Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Analysis of MEMS Gyroscope Error
2.1. Analysis of Noise Sources of MEMS Gyroscopes
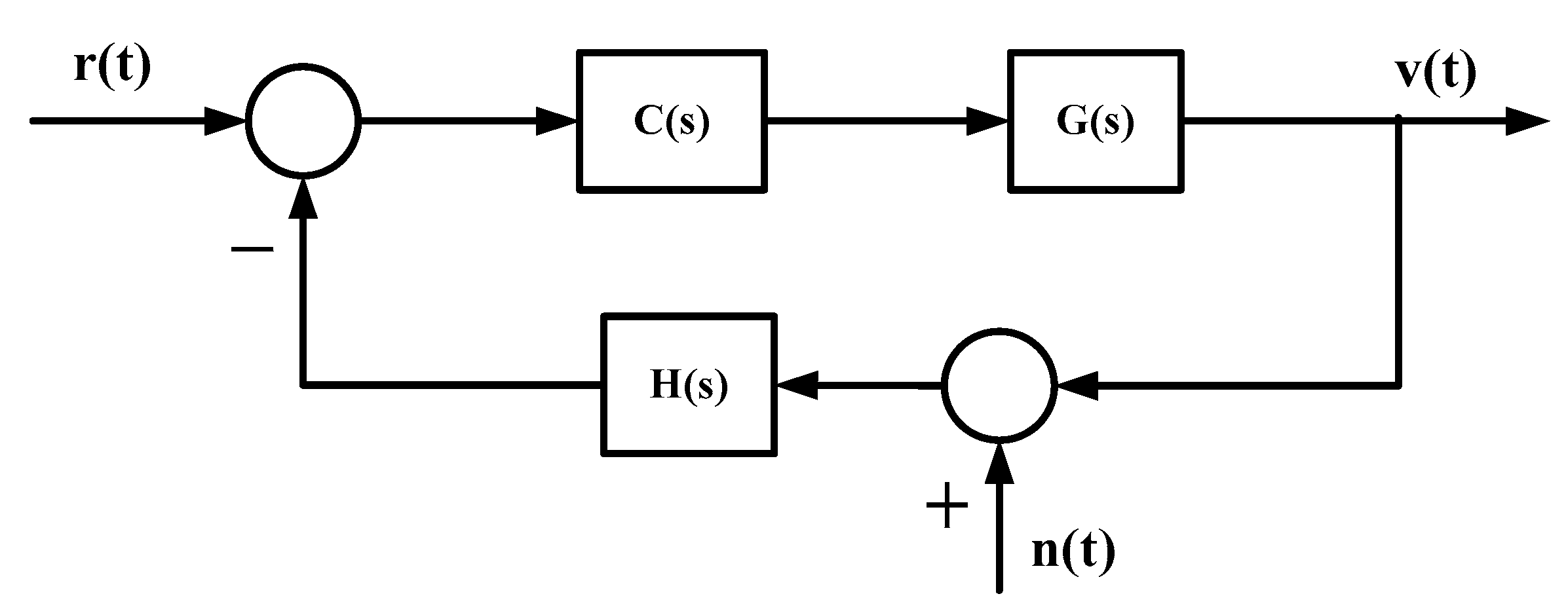
2.2. Influence of MEMS Gyroscope Error on Stable Platform System
3. Design and Simulation of the Filter Algorithm
3.1. Improved Kalman Filter Algorithm
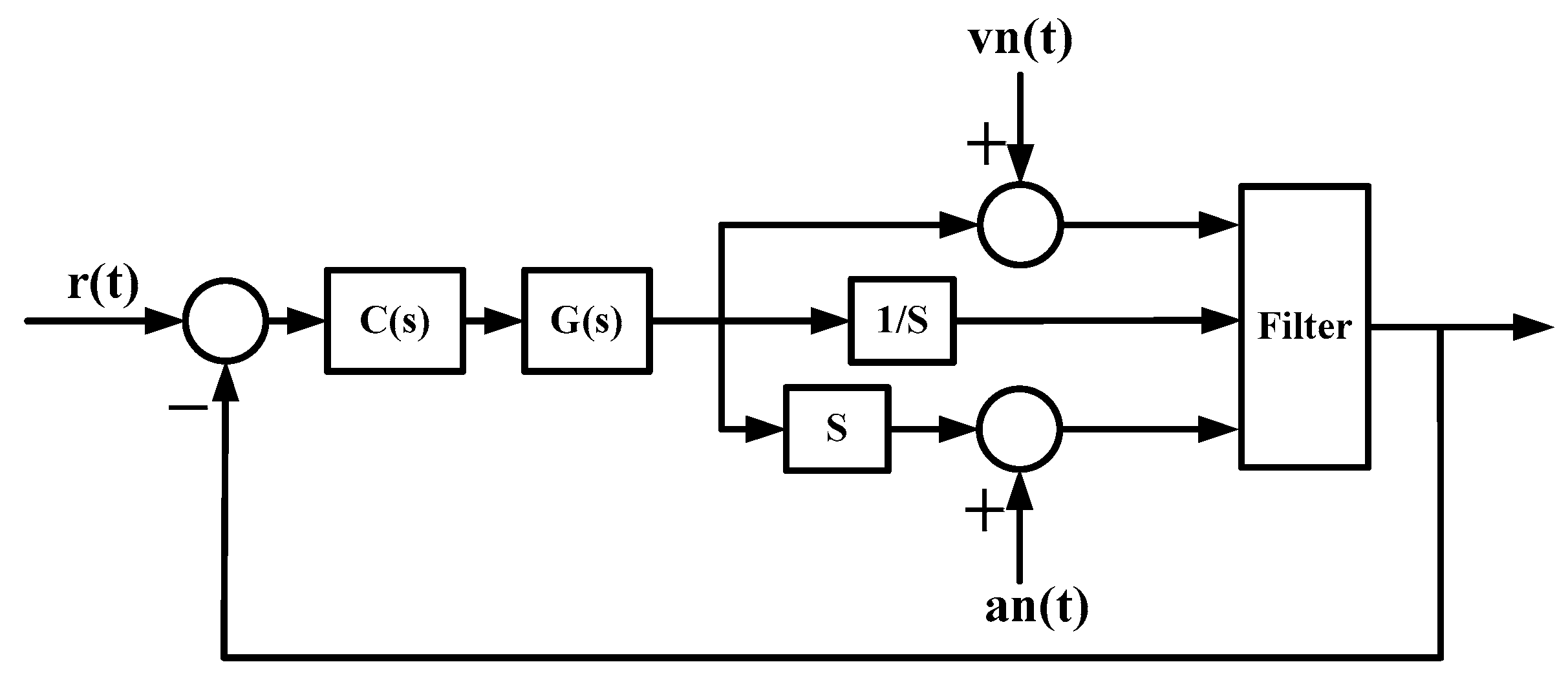
3.1.1. Design of Kalman Filtering Algorithm Based on Information Fusion
3.1.2. Proof of Stability of Kalman Filter Algorithm Based on Information Fusion
3.2. Forward Linear Prediction Filter Algorithm
3.3. Simulation Analysis of Filter Algorithm
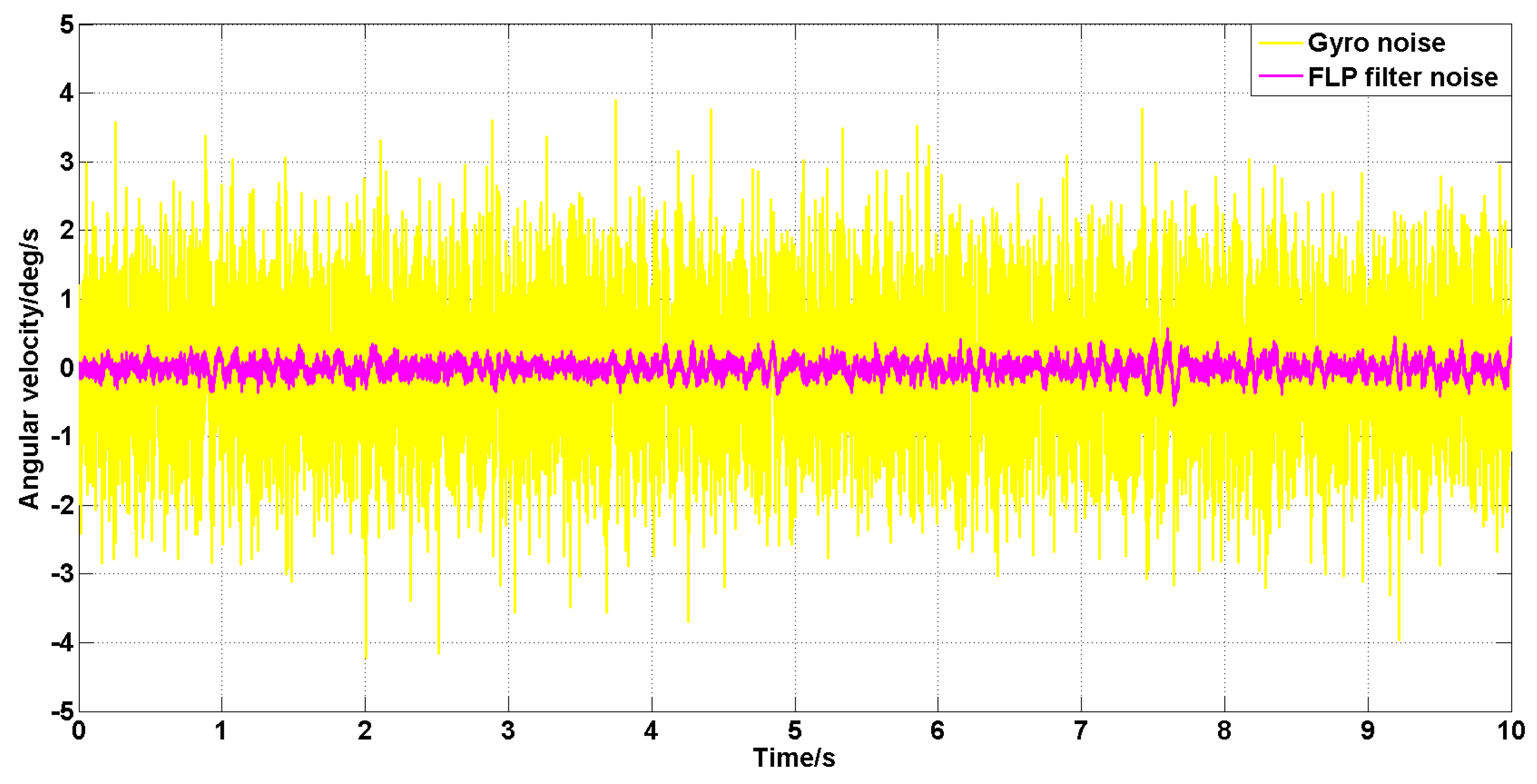
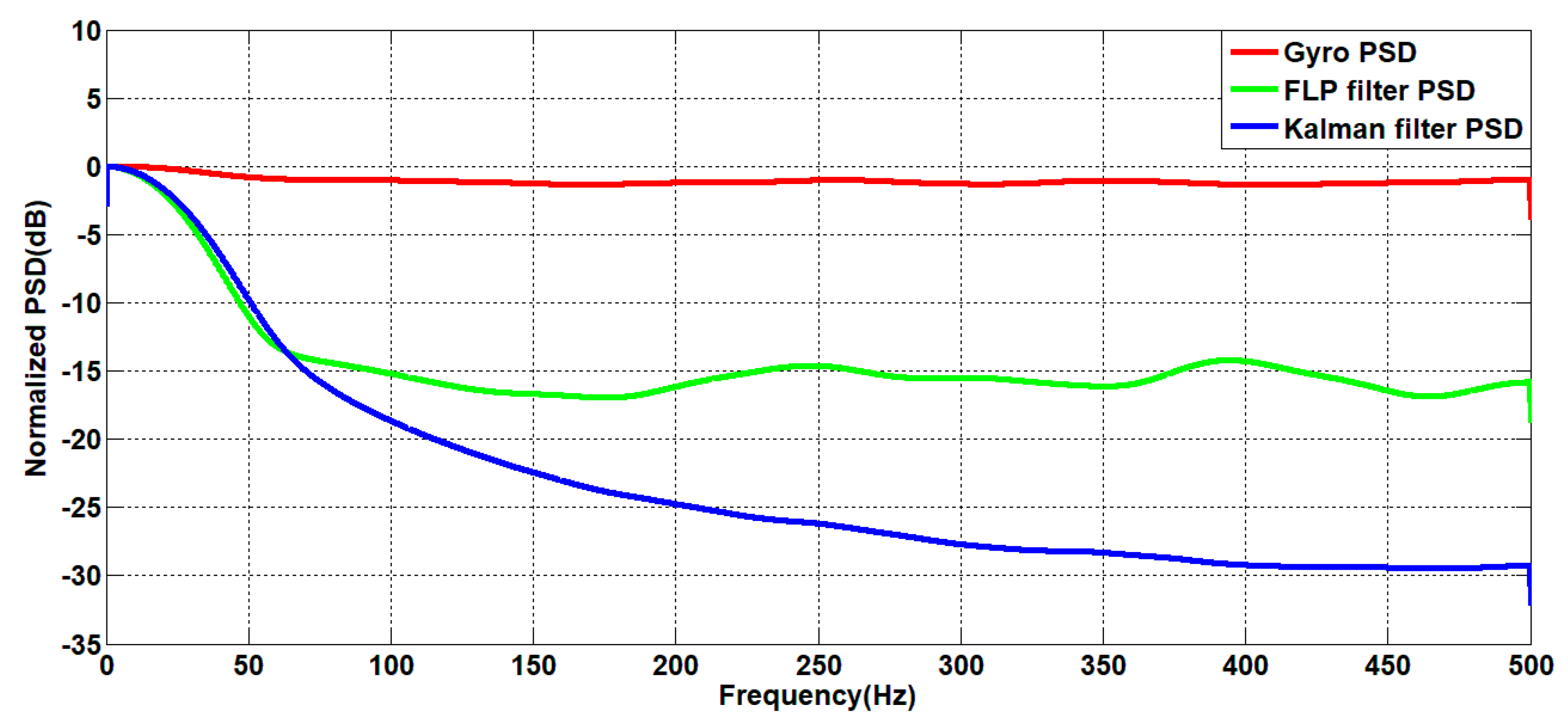
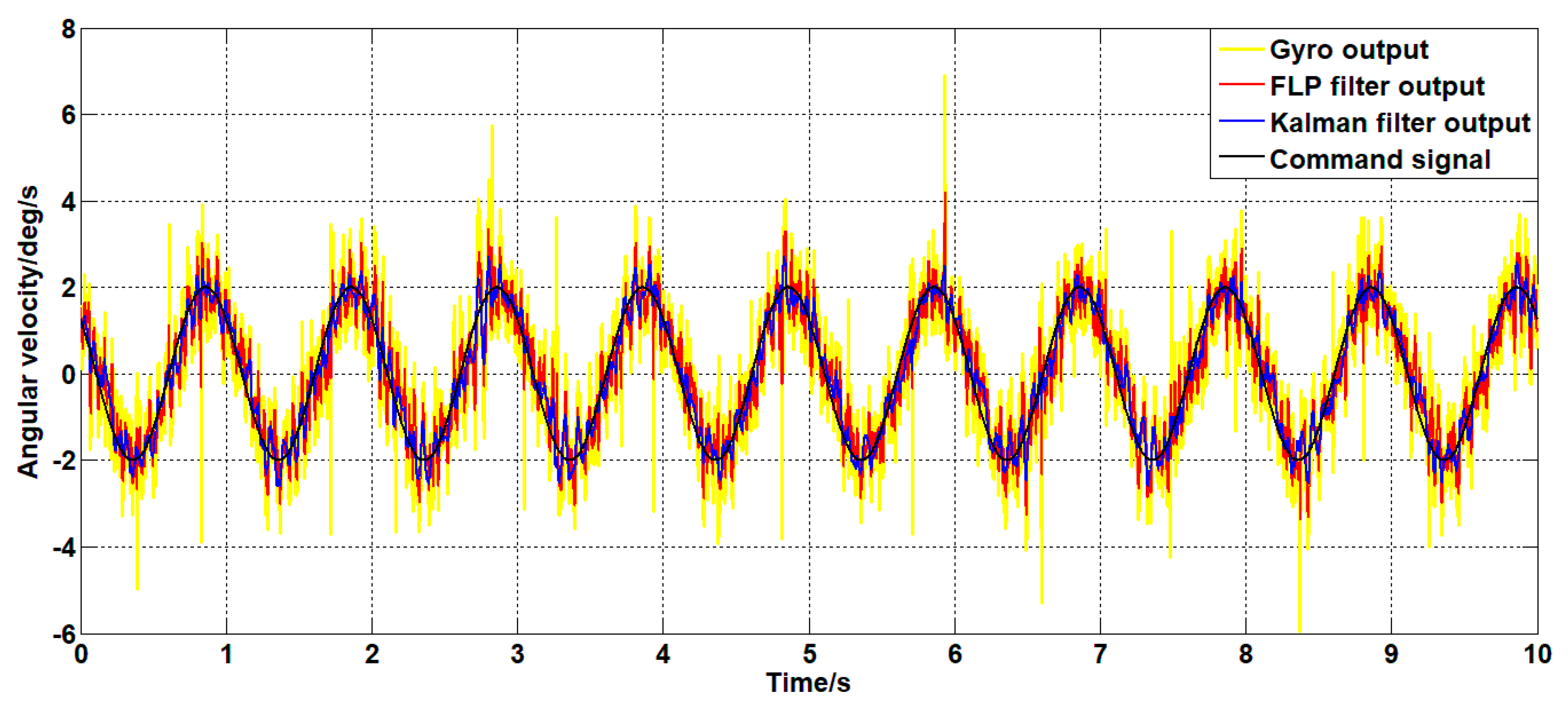
3.3.1. Analysis of Static Filtering
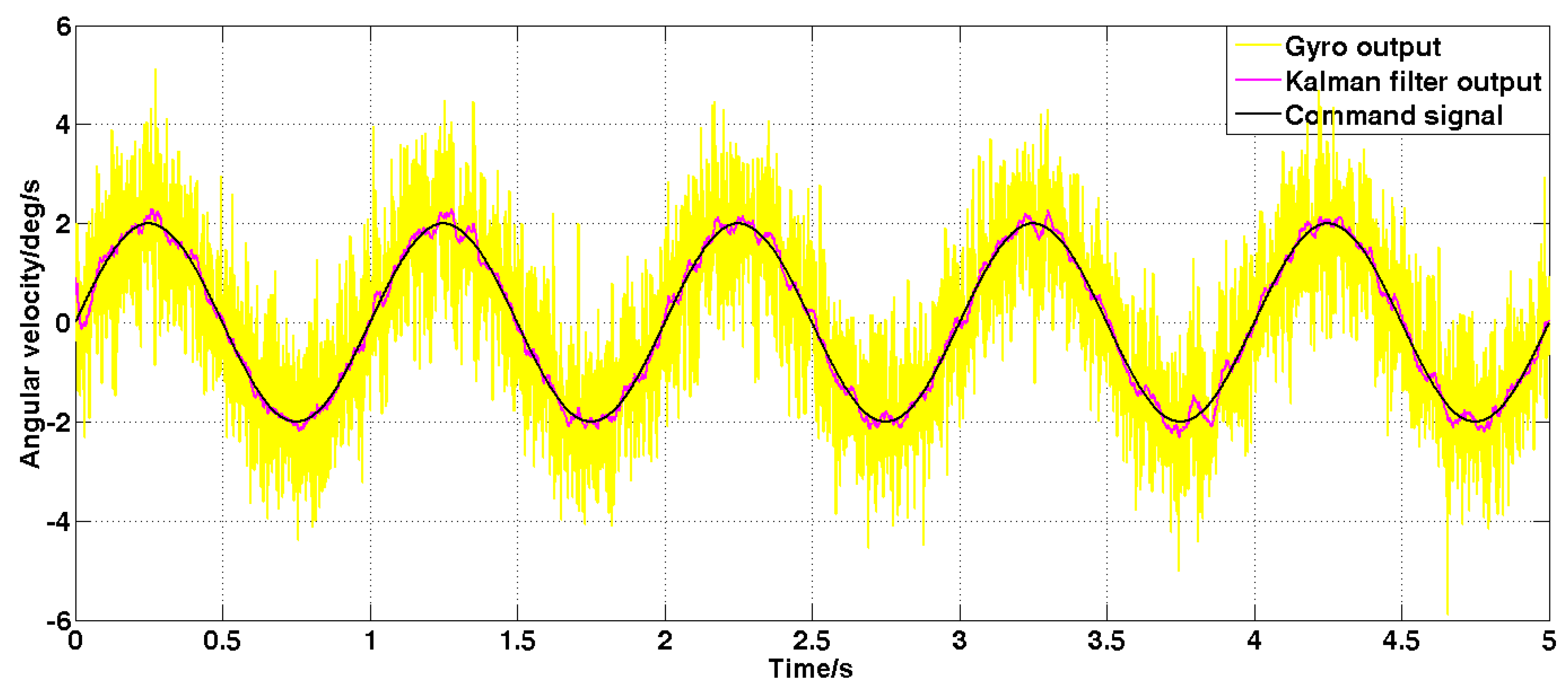
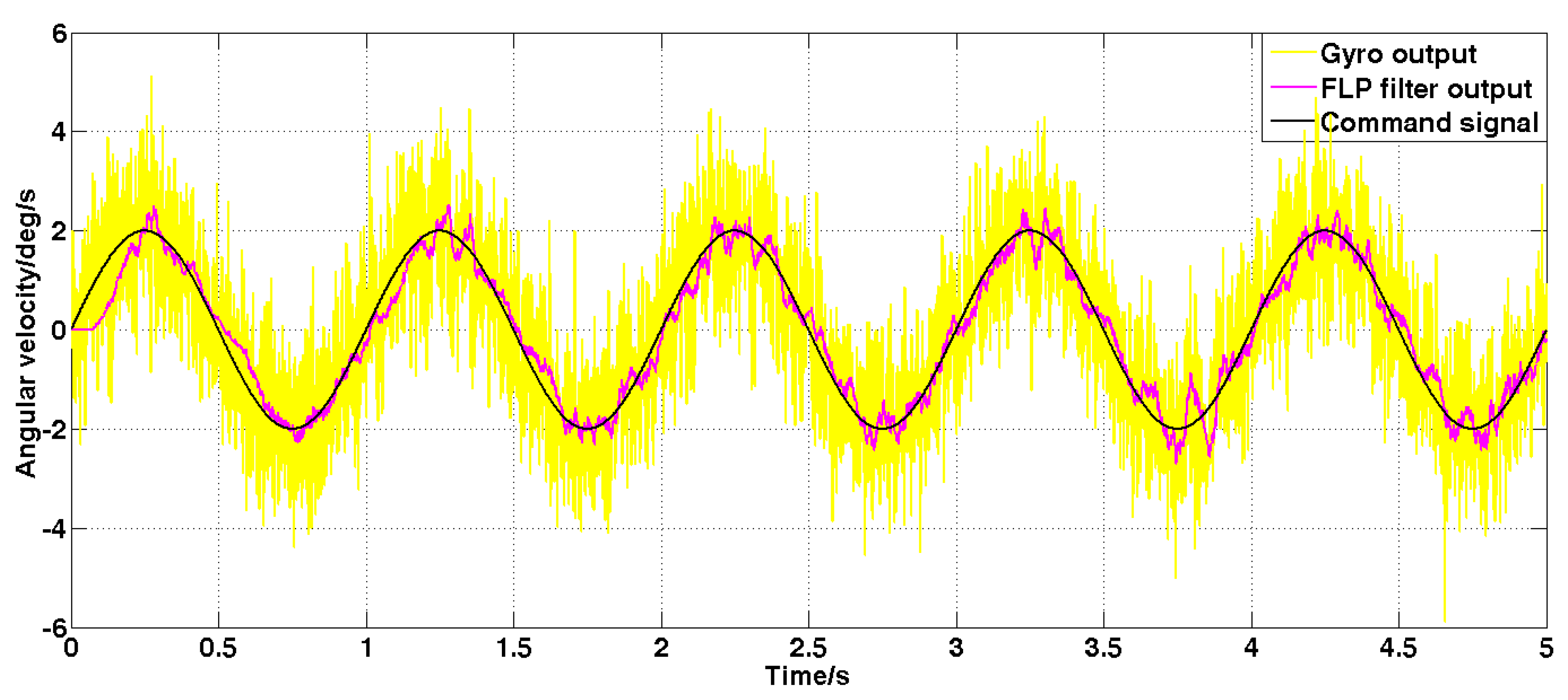
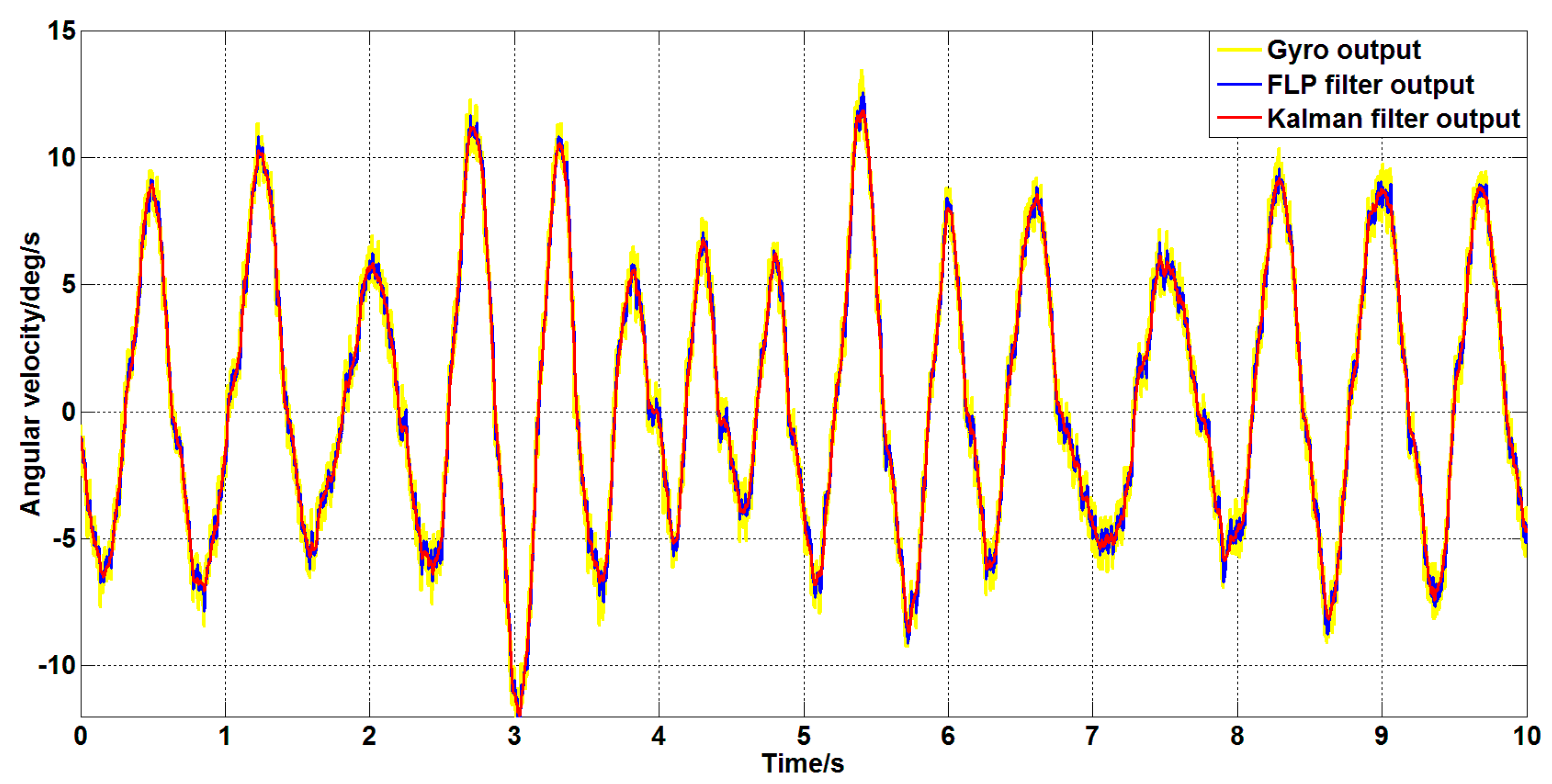
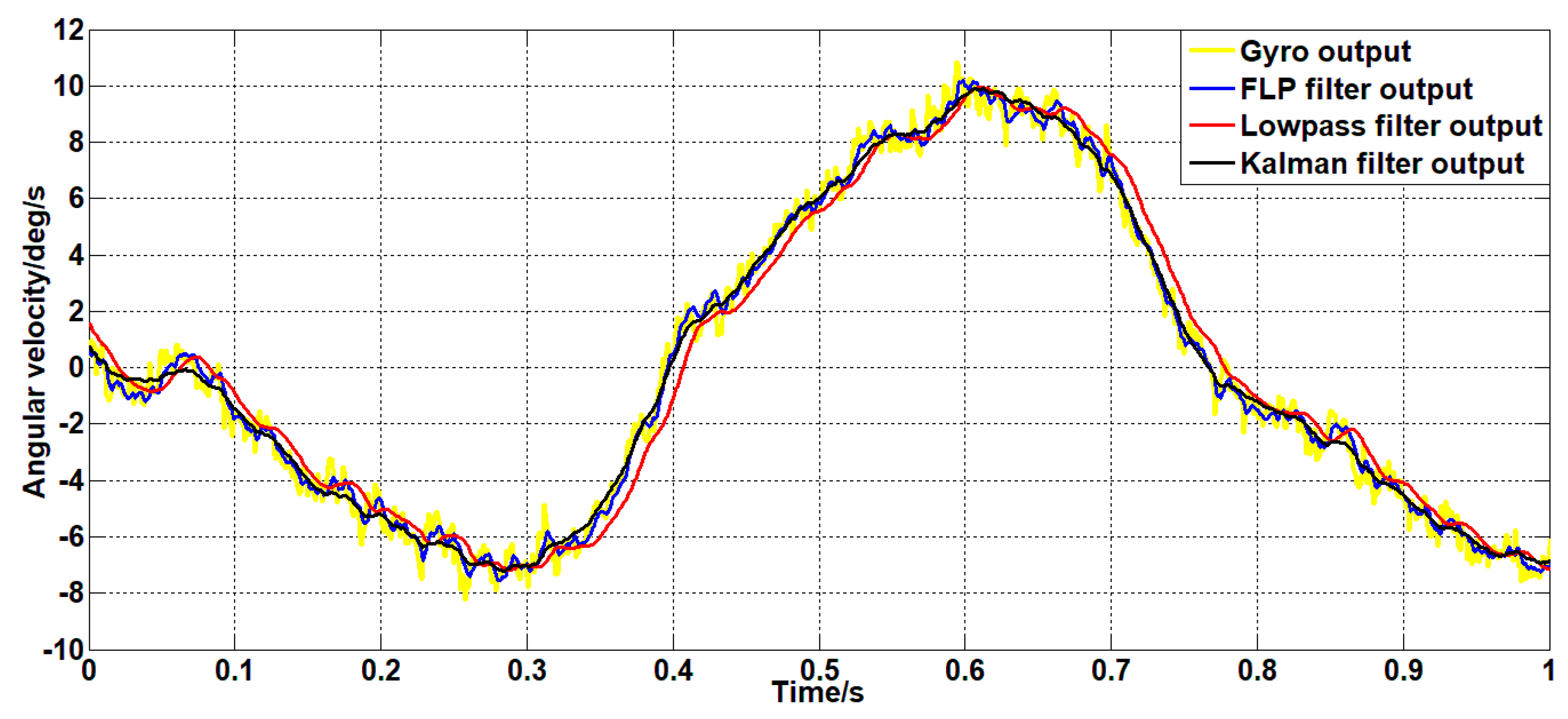
3.3.2. Analysis of Dynamic Filtering
4. Comparison and Analysis of Experimental Results
4.1. Filtering Experiment
4.1.1. Static Filtering Experiment
4.1.2. Dynamic Filtering Experiment
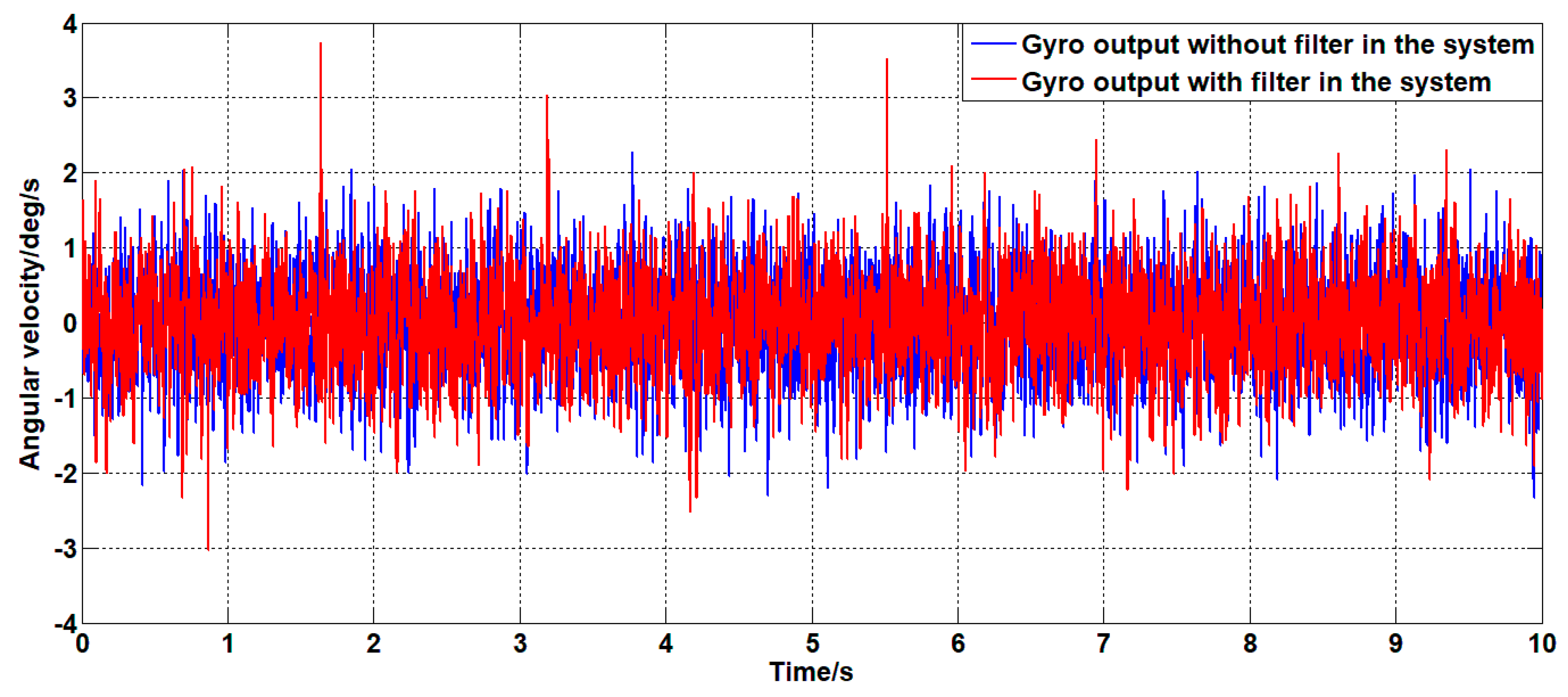
4.2. Influence of Signal Filtering on System Control Performance
5. Conclusions
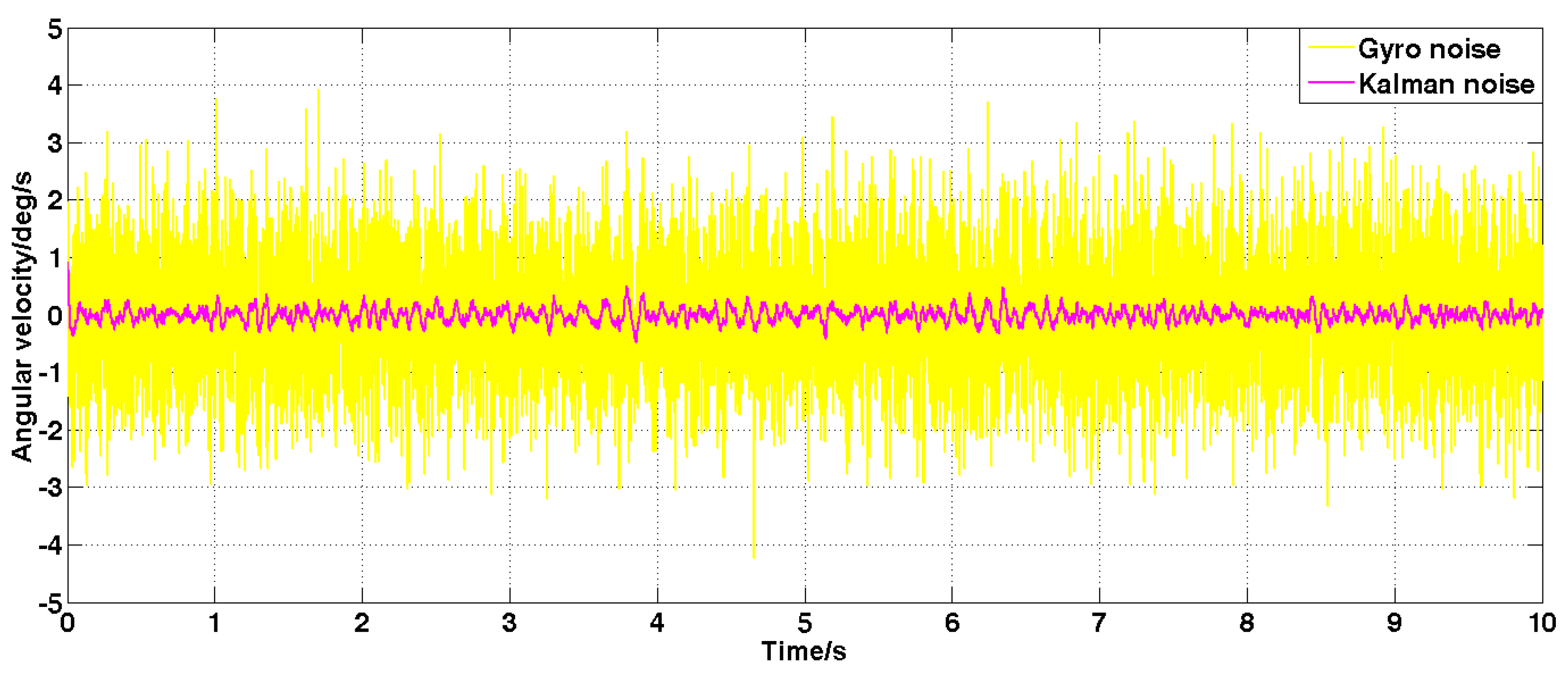
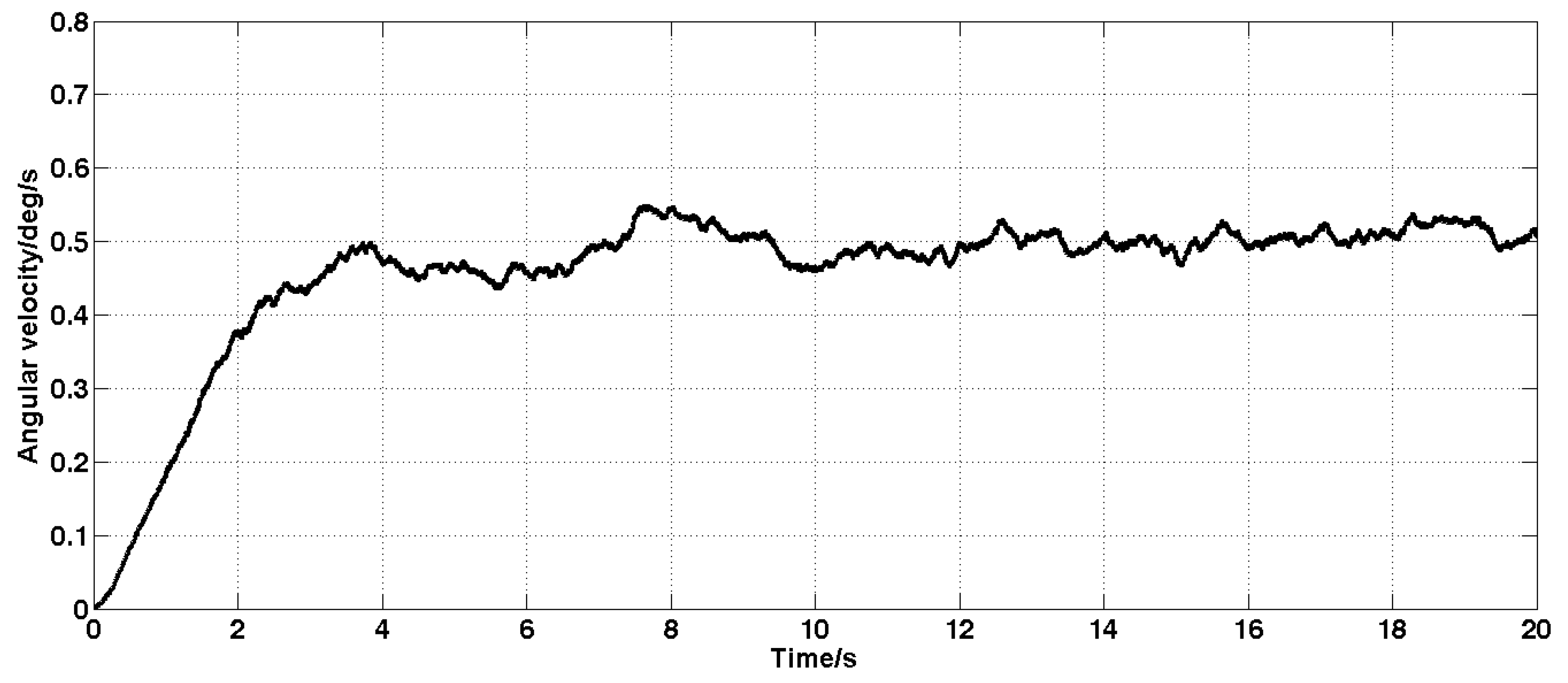
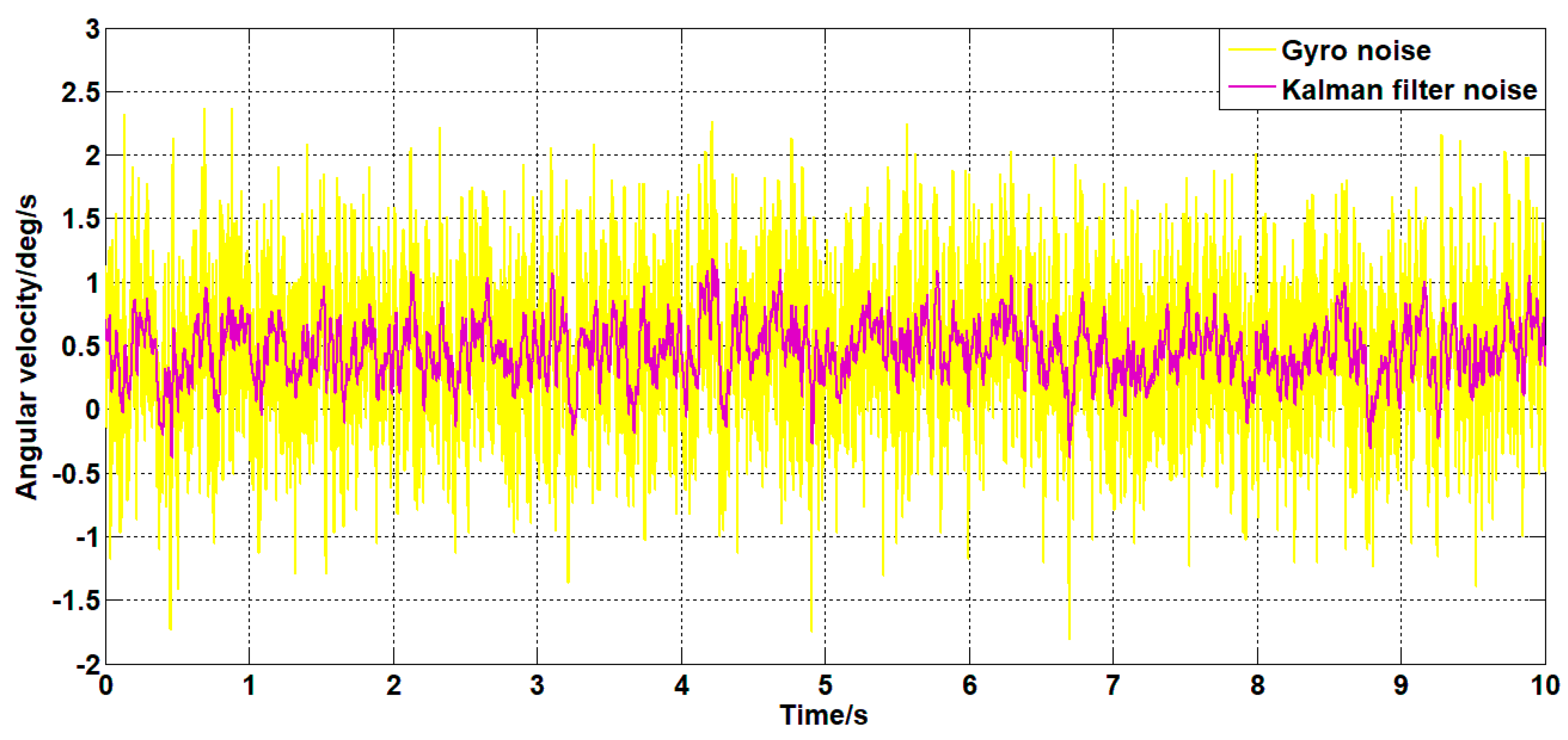
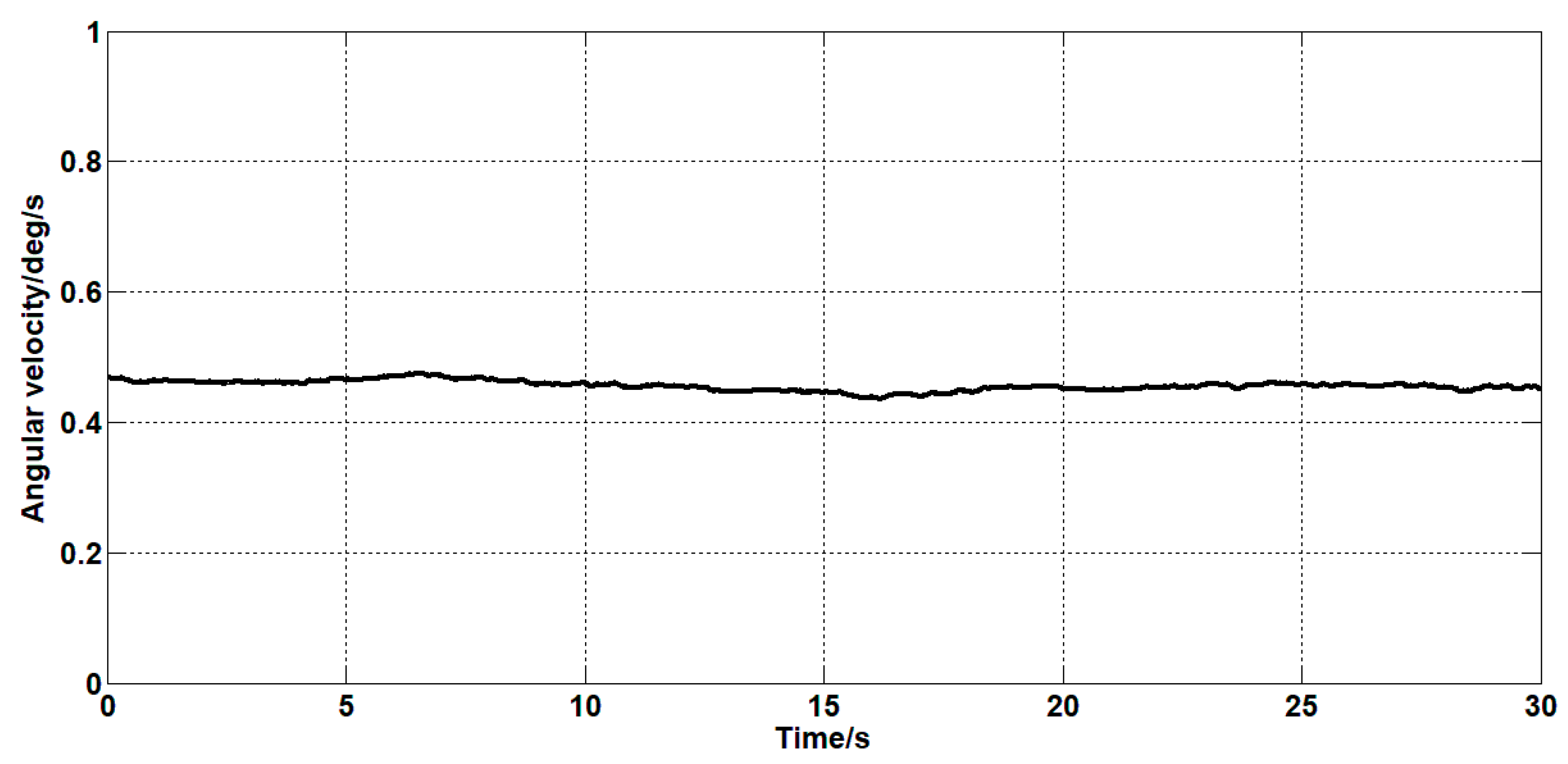
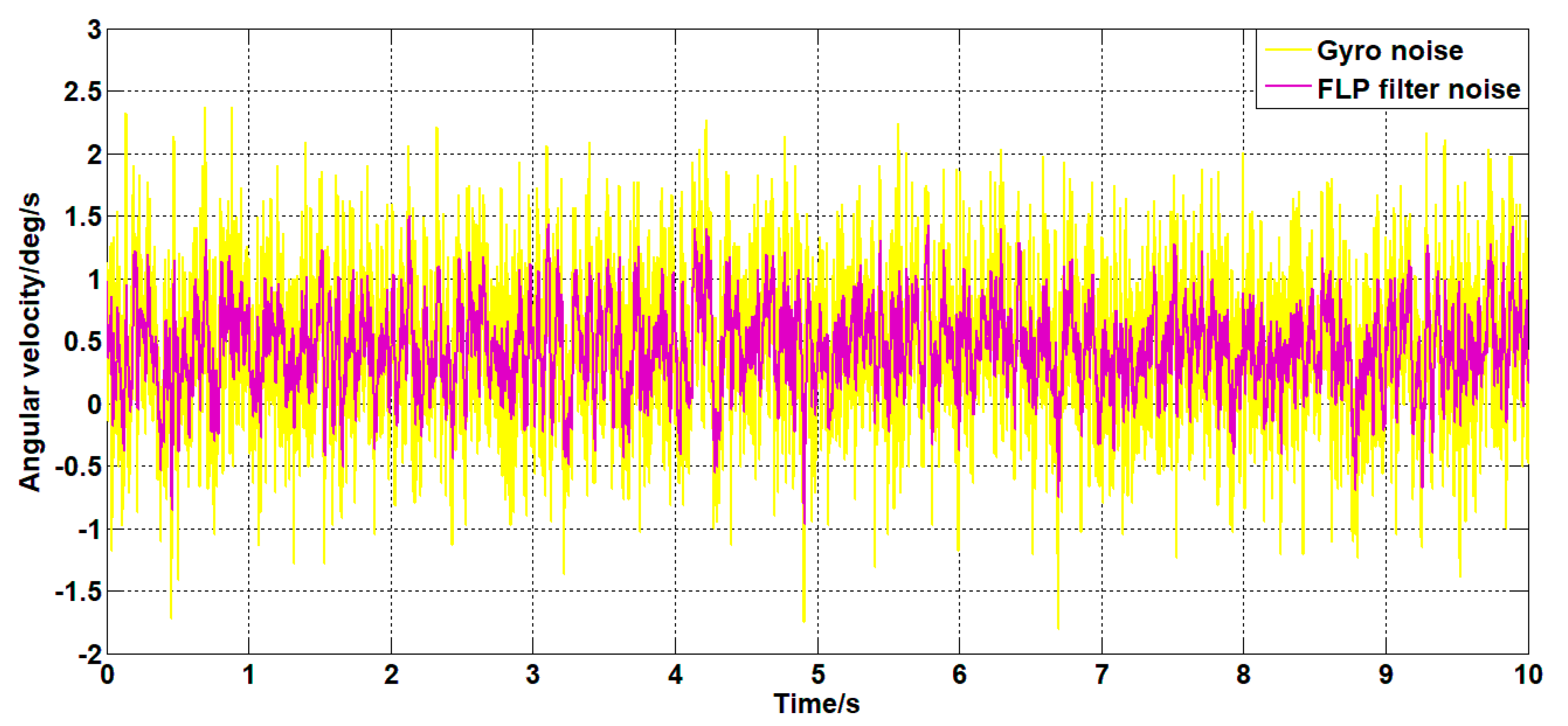
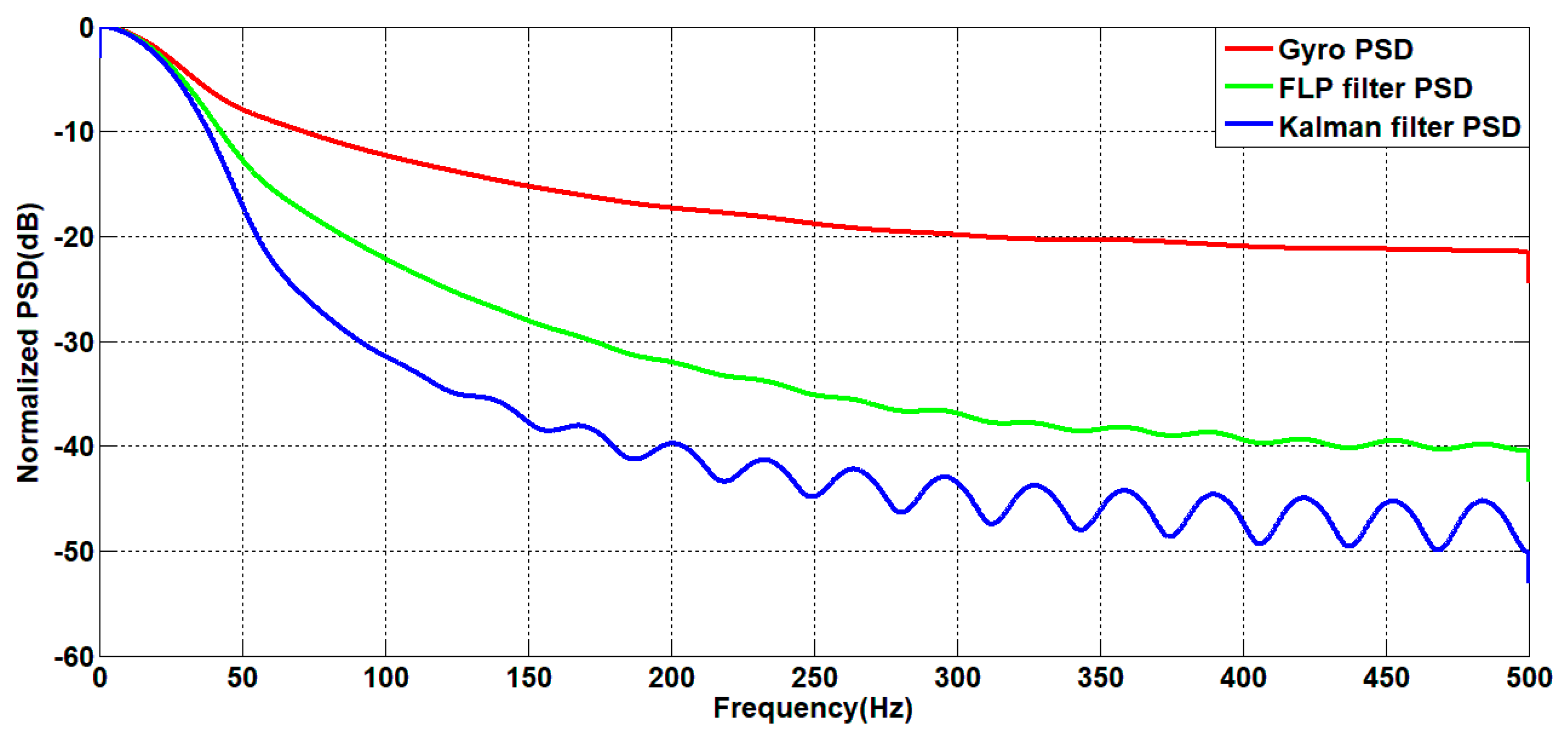
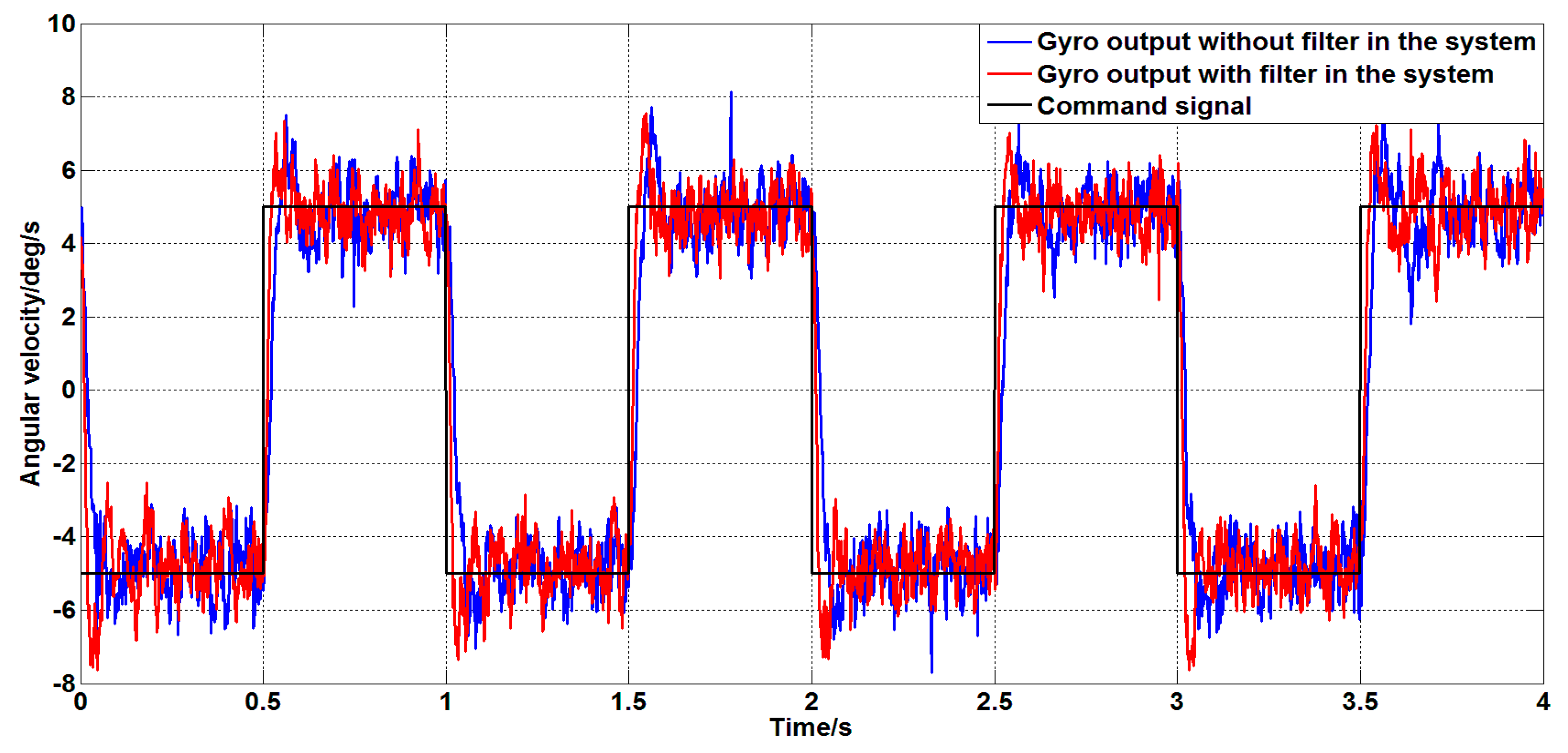
- Both filtering algorithms can reduce the noise level of the MEMS gyroscope. However, the filtering effect of the Kalman filter algorithm based on information fusion is better than that of the forward linear filter algorithm, and its noise reduction capability can reach up to 30dB. And it can estimate the constant drift of the MEMS gyroscope more accurately. The average error between the estimated and actual values is 0.02 .
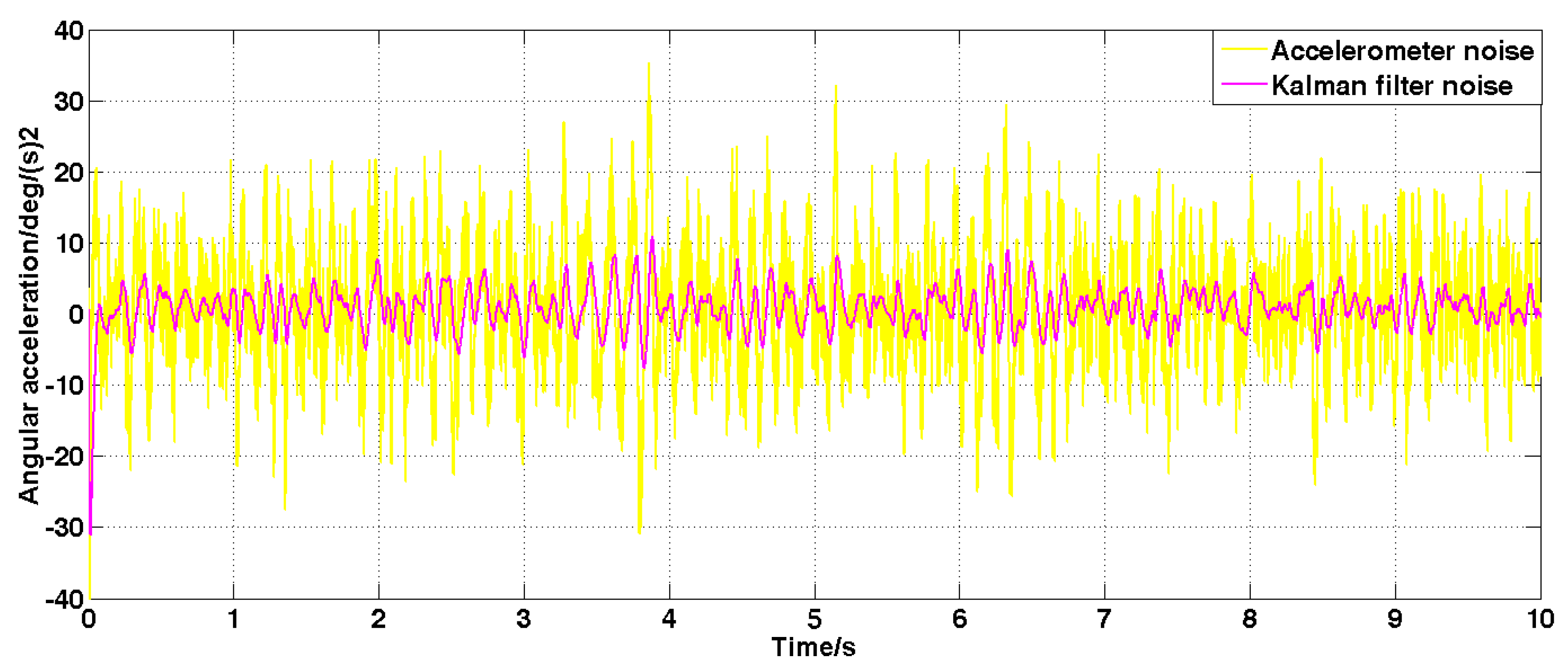
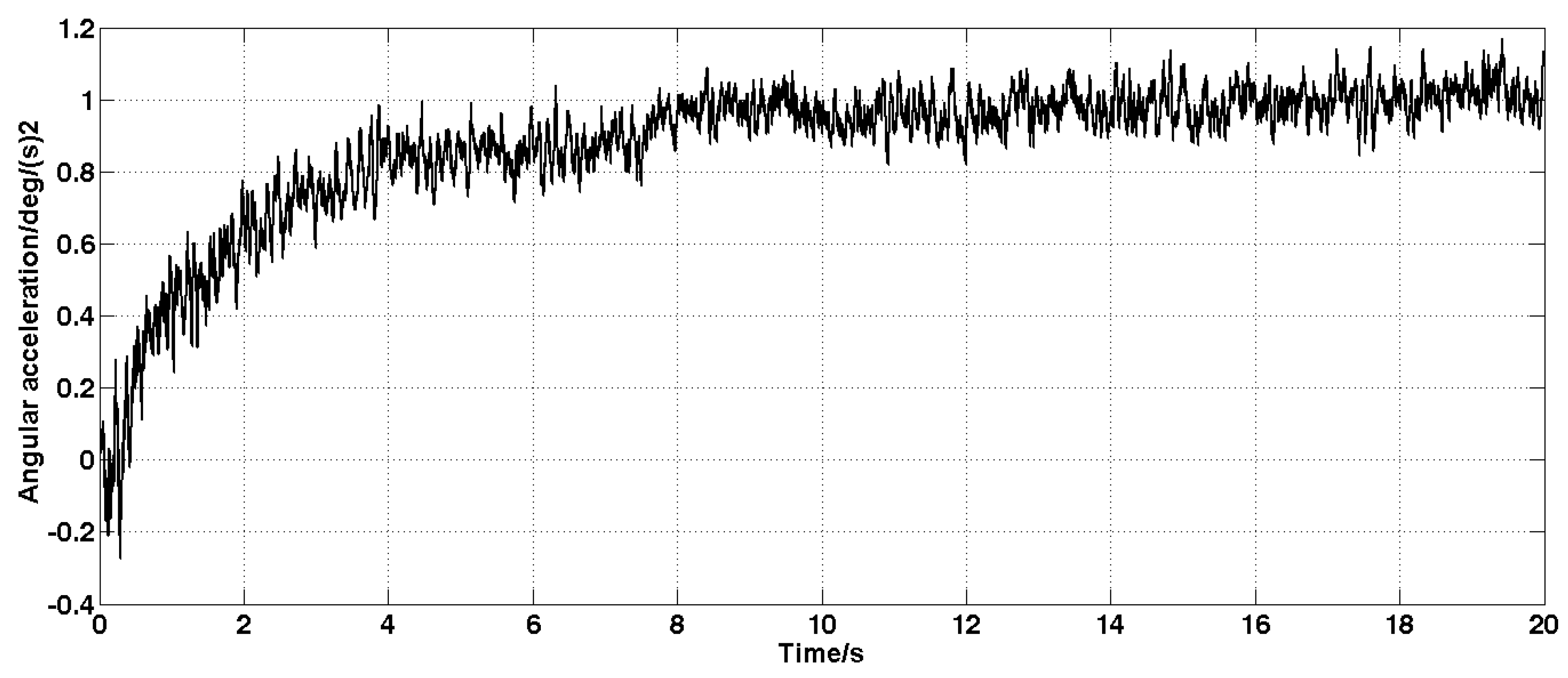
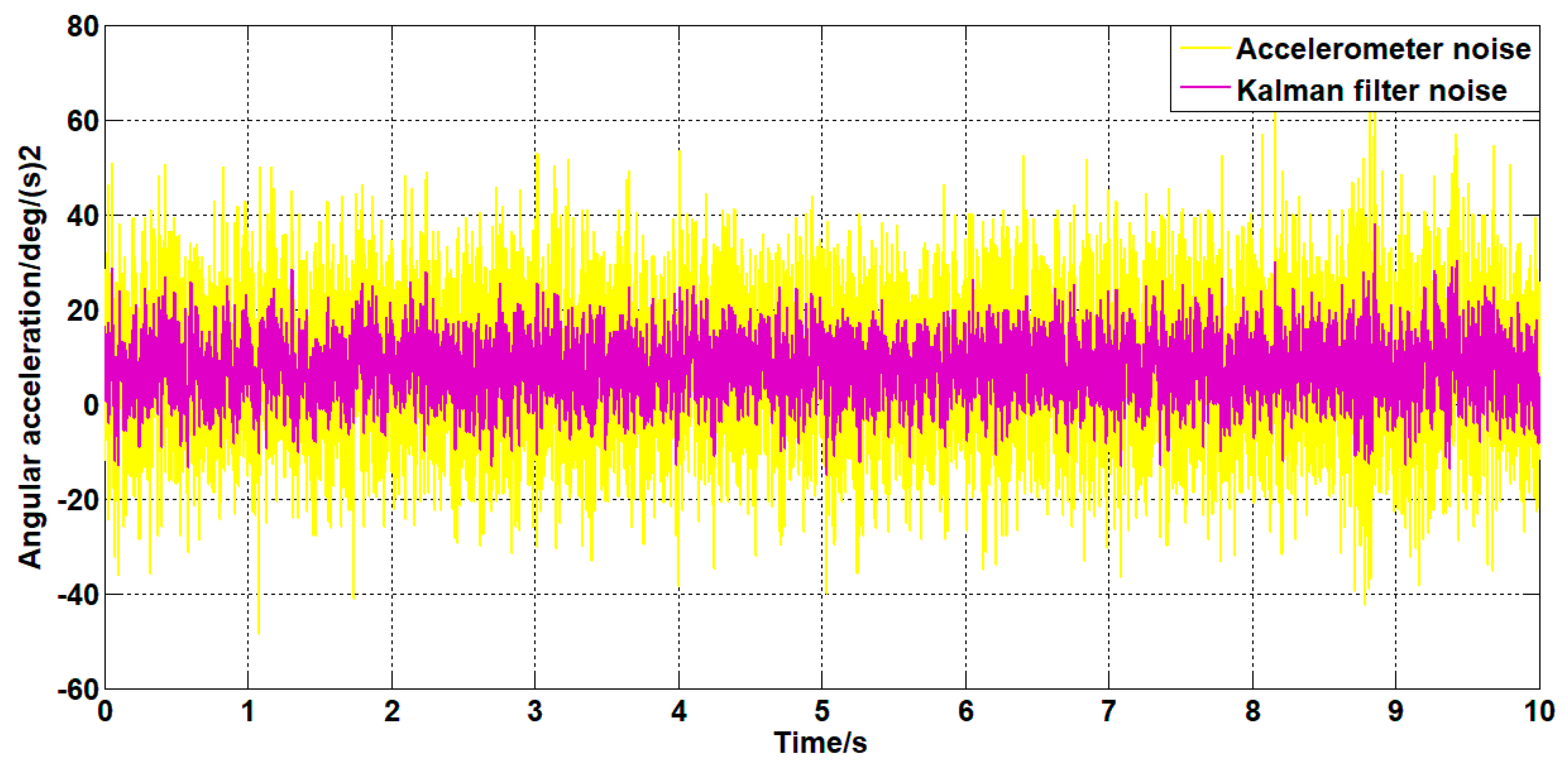
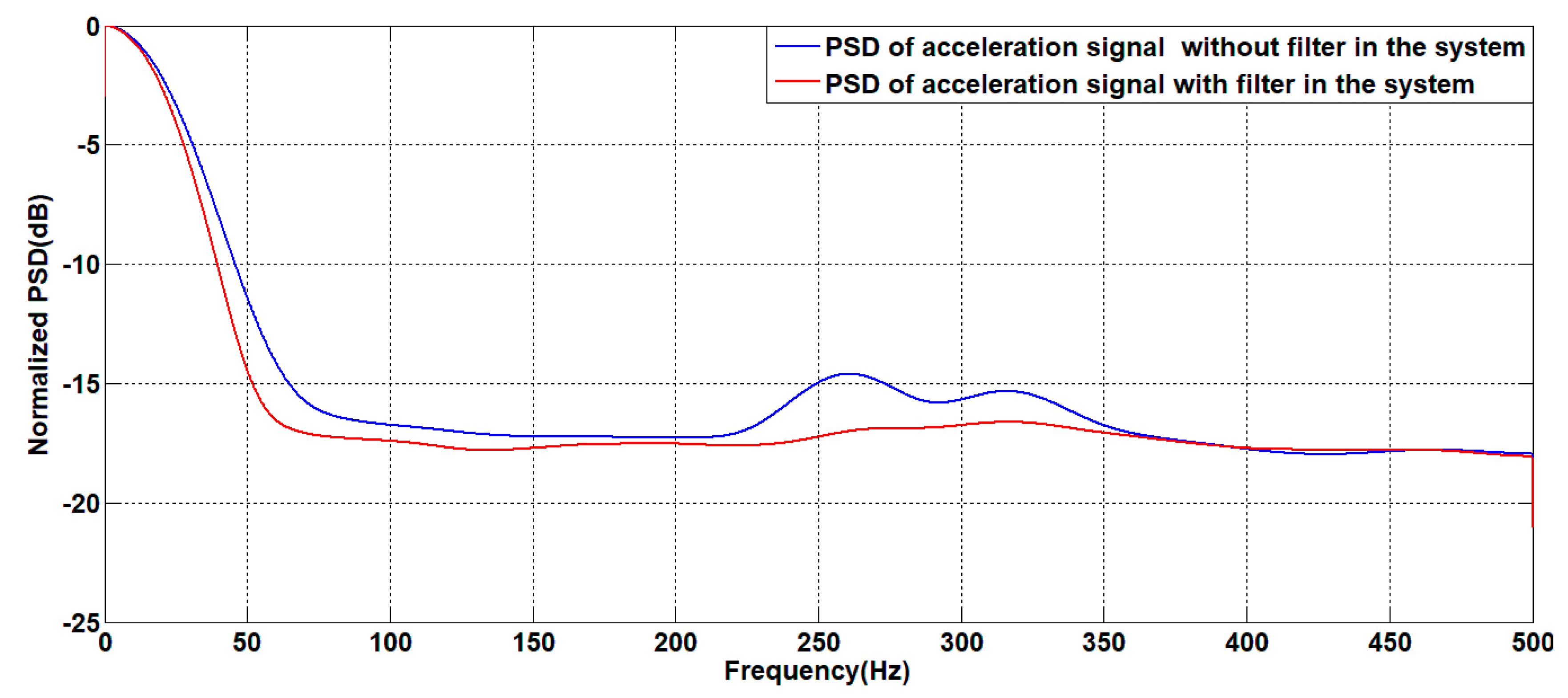
- The Kalman filter algorithm based on information fusion can simultaneously reduce the noise level of the accelerometer signal. It can also estimate the constant value drift of the accelerometer, and the average error between the estimated value and the actual value is 0.1 .
Author Contributions
Funding
Conflicts of Interest
References
- Wang, D.S.; Lu, Y.J.; Zhang, L.; Jiang, G.P. Intelligent Positioning for a Commercial Mobile Platform in Seamless Indoor/Outdoor Scenes based on Multi-sensor Fusion. Sensors 2019, 19, 1696. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.C.; Su, Z.; Zhao, H.; Li, Q.; Li, C. Attitude Measurement for High-Spinning Projectile with a Hollow MEMS IMU Consisting of Multiple Accelerometers and Gyros. Sensors 2019, 19, 1799. [Google Scholar] [CrossRef] [PubMed]
- Narasimhappa, M.; Nayak, J.; Terra, M.H.; Sabat, S.L. ARMA model based adaptive unscented fading Kalman filter for reducing drift of fiber optic gyroscope. Sens. Actuators A Phys. 2016, 251, 42–51. [Google Scholar] [CrossRef]
- Donoho, D.L. De-noising by soft-thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Qian, H.; Ma, J. Research on fiber optic gyro signal de-noising based on wavelet packet soft-threshold. J. Syst. Eng. Electron. 2009, 20, 607–612. [Google Scholar]
- Zhang, Q.; Wang, L.; Gao, P.; Liu, Z. An innovative wavelet threshold denoising method for environmental drift of fiber optic gyro. Math. Probl. Eng. 2016, 2016, 1–8. [Google Scholar] [CrossRef]
- Yuan, J.; Yuan, Y.; Liu, F.; Pang, Y.; Lin, J. An improved noise reduction algorithm based on wavelet transformation for MEMS gyroscope. Front. Optoelectron. 2015, 8, 413–418. [Google Scholar] [CrossRef]
- Wang, S.J. Research on Servo Control System of Gyro Stabilized Platform. Master’s Thesis, Harbin Institute of Technology, Harbin, China, 2008. [Google Scholar]
- Zhang, Z.Y.; Fan, D.P.; Li, K.; Zhang, W.B. Study on the filtering method of micro-electromechanical gyro zero drift data. J. Chin. Inert. Technol. 2006, 4, 67–69. [Google Scholar]
- Park, S.; Gil, M.S.; Im, H.; Moon, Y.S. Measurement Noise Recommendation for Efficient Kalman Filtering over a Large Amount of Sensor Data. Sensors 2019, 19, 1168. [Google Scholar] [CrossRef] [PubMed]
- Li, L.M.; Zhao, L.Y.; Tang, X.H.; He, W.; Li, F.R. Gyro Error Compensation Algorithm Based on Improved Kalman Filter. J. Transduct. Technol. 2018, 31, 538–544, 550. [Google Scholar]
- Zhou, X.Y. Research on Target Positioning Error Analysis and Correction of Photoelectric Detection System. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2011. [Google Scholar]
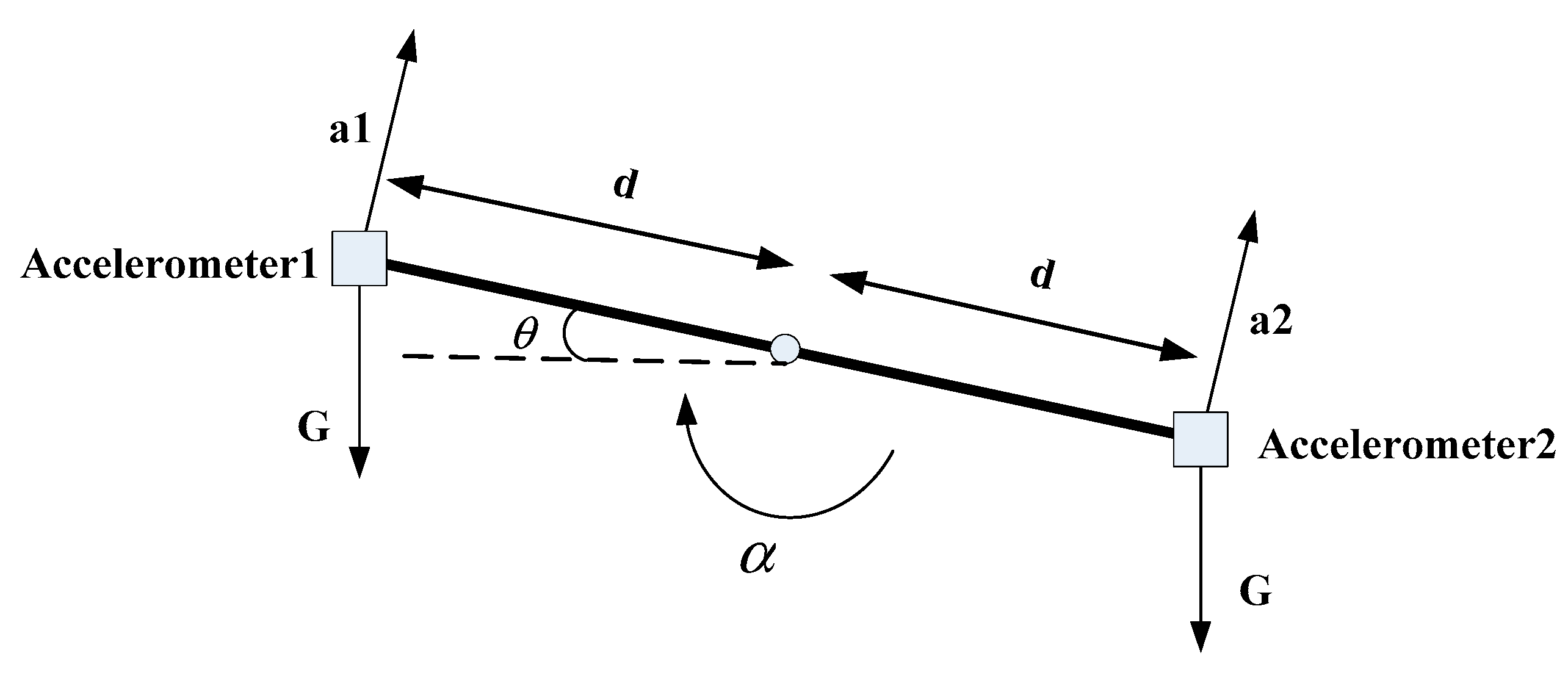
- Li, Q.G.; Zhang, H.L.; Hao, J.R. Research on Gyroscope Drift Compensation Algorithm Based on Six Accelerometers. Sens. Microsyst. 2009, 28, 42–44. [Google Scholar]
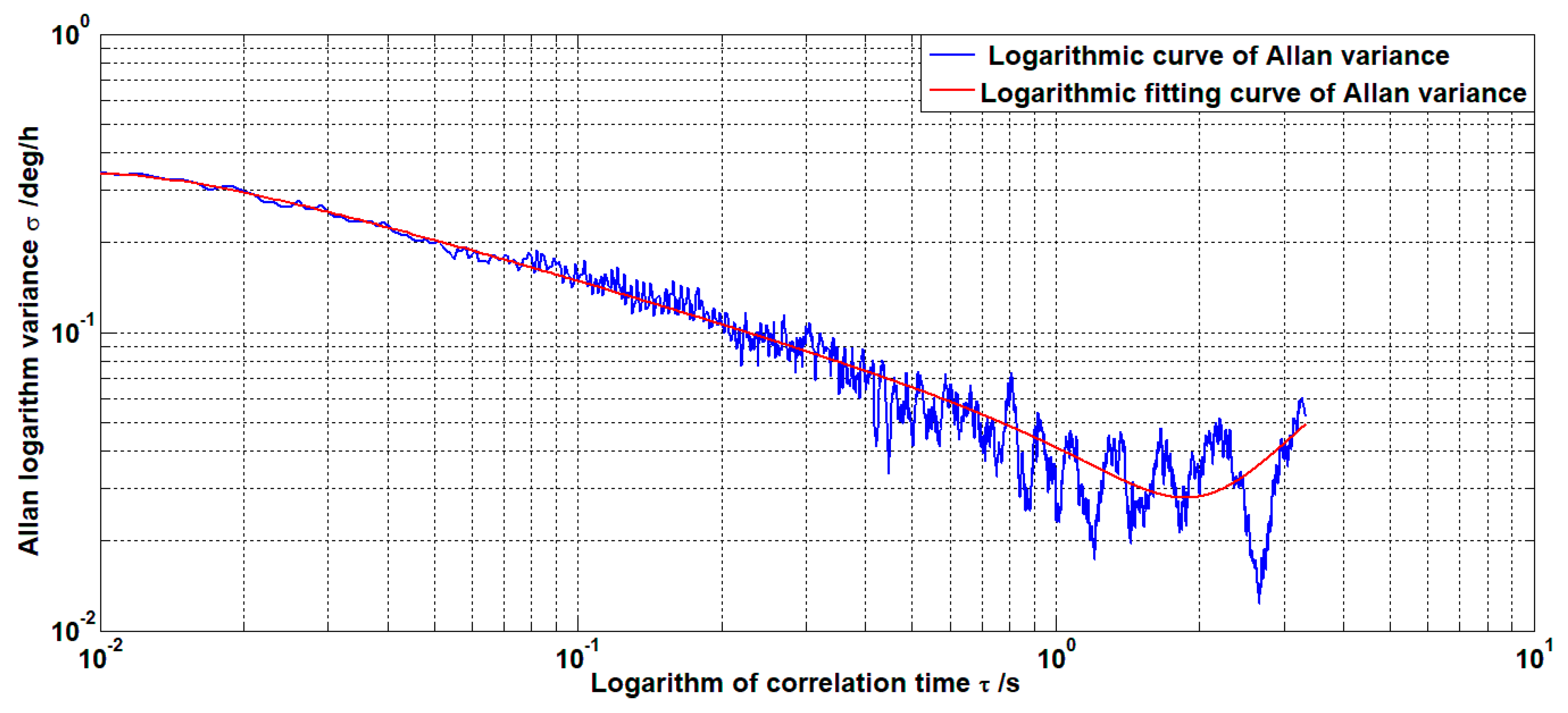
- Jiang, X.Y.; Zhang, X.F.; Li, M.W. Random Error Analysis Method of MEMS Gyroscope Based on Allan Variance. J. Test Meas. Technol. 2017, 3, 190–195. [Google Scholar]
- Xiong, B.F. Modeling and Correction of Low-Cost MEMS Gyroscope Random Drift Error. Master’s Thesis, Southwest University, Chongqing, China, 2017. [Google Scholar]
- Cao, H.; Lü, H.; Sun, Q. Model Design Based on MEMS Gyroscope Random Error. In Proceedings of the 2015 IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015. [Google Scholar]
- Zhou, X.Y.; Zhang, Z.Y.; Fan, D.P. Improved Angular Velocity Estimation Using MEMS Sensors with Applications in Miniature Inertially Stabilized Platforms. Chin. J. Aeronaut. 2011, 24, 648–656. [Google Scholar] [CrossRef]
- Fu, M.Y.; Deng, Z.H.; Yan, L.P. Kalman Filtering Theory and Its Application in Navigation System; Science Press: Beijing, China, 2010; pp. 38–43. [Google Scholar]
- Anderson, B.D.O. Stability properties of Kalman bucy filters. J. Frankl. Inst. 1971, 29, 137–144. [Google Scholar] [CrossRef]
- Zhou, Z.W.; Fang, H.T. Kalman Filtering Stability with Random Coefficient Matrix under Inexact Variance. Acta Autom. Sin. 2013, 39, 43–52. [Google Scholar] [CrossRef]
- Yi, K.; Li, T.Z.; Wu, W.Q. Application of FLP Filtering Algorithm in Fiber Optic Gyro Signal Preprocessing. J. Chin. Inert. Technol. 2005, 24, 60–64. [Google Scholar]
- Zhang, W.B. Research on the Working Characteristics of the Seeker Servo Mechanism and Advanced Measurement and Control Methods. Ph.D. Thesis, National University of Defense Technology, Changsha, China, 2009. [Google Scholar]




























© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, H.; Hong, H. Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion. Sensors 2019, 19, 3552. https://doi.org/10.3390/s19163552
Guo H, Hong H. Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion. Sensors. 2019; 19(16):3552. https://doi.org/10.3390/s19163552
Chicago/Turabian StyleGuo, Hui, and Huajie Hong. 2019. "Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion" Sensors 19, no. 16: 3552. https://doi.org/10.3390/s19163552
APA StyleGuo, H., & Hong, H. (2019). Research on Filtering Algorithm of MEMS Gyroscope Based on Information Fusion. Sensors, 19(16), 3552. https://doi.org/10.3390/s19163552