A Comparative Study of Computational Methods for Compressed Sensing Reconstruction of EMG Signal





Abstract
1. Introduction
2. Compressed Sensing Background
3. The Algorithms
3.1. Encoding
3.2. Basis Matrix
3.3. Reconstruction
3.3.1. Convex Optimization
L1-minimization
| Algorithm 1 L1-minimization |
| Input: Inizialize: Output: k-sparse coefficient vector x while do // reduce to binary vector if then // define the set of indices corresponding to a change from to else end if end while |
3.3.2. Greedy Algorithms
Orthogonal Matching Pursuit (OMP)
| Algorithm 2 OMP |
| Input: Initialize: Output: k-sparse coefficient vector x while do // find the column of A that is most strongly correlated with the residual // merge the new column // find the best coefficients from (31) // update the residual end while |
Compressive Sampling Matching Pursuit (CoSaMP)
Normalized Iterative Hard Thresholding (NIHT)
| Algorithm 3 CoSaMP |
| Input: Initialize: // find k columns of that are most strongly correlated with residual Output: k-sparse coefficient vector x while do // number of new columns to be selected // find columns of that are most strongly correlated with residual // merge the new columns such that // find the best coefficients for residual approximation // find the set of sparsity // find sparse vector x // update the residual end while |
| Algorithm 4 NIHT |
Input: Initialize: Output: k-sparse coefficient vector x whiledo // update residual // step size vector // normalized gradient vector // initialize the set of sparsity ifthen while (stop criterion on ) do // update with step size given by (46) // update set of sparsity // find sparse vector end while else // find sparse vector end if end while |
4. Comparative Study
4.1. Case Study A
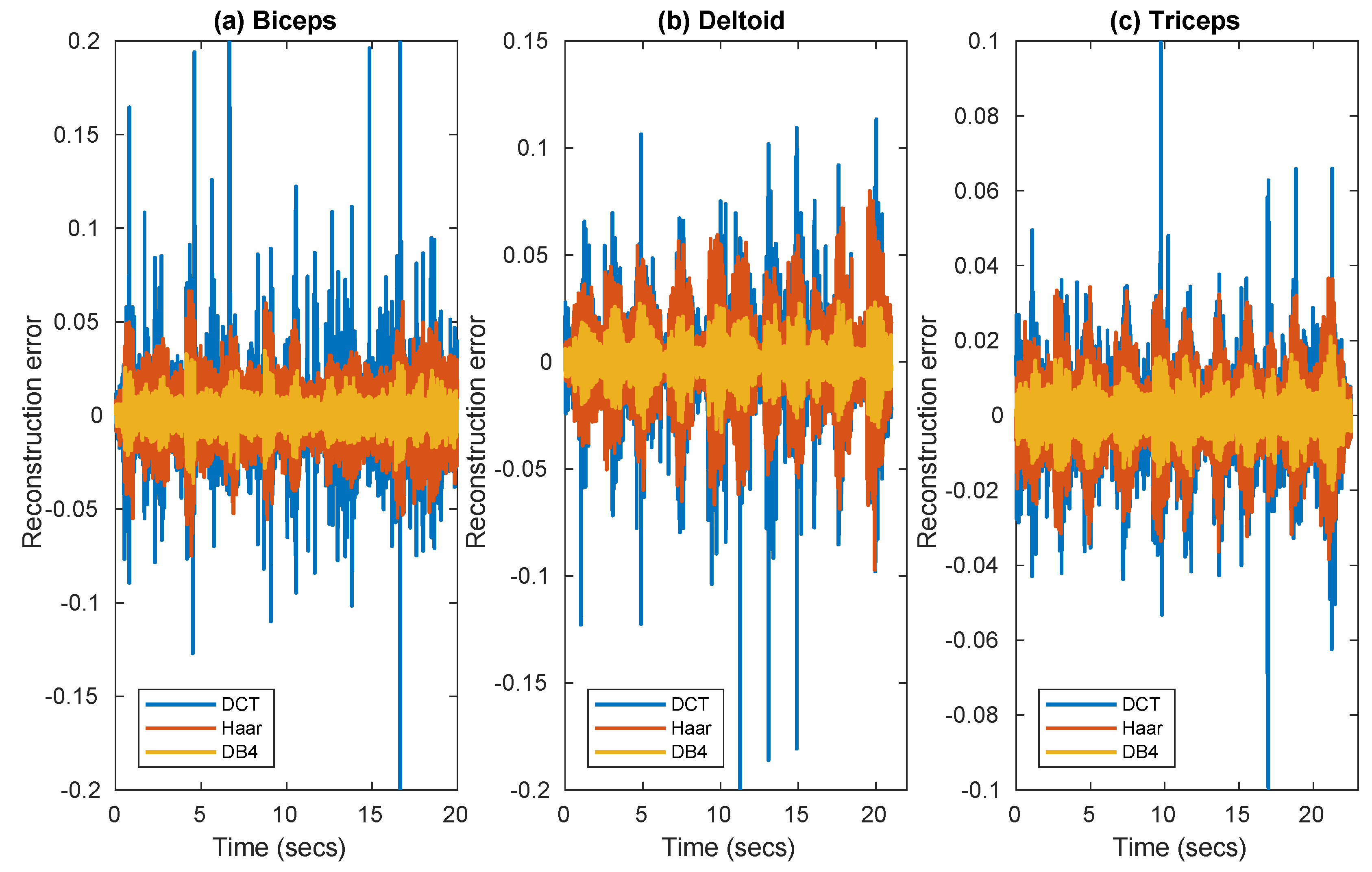
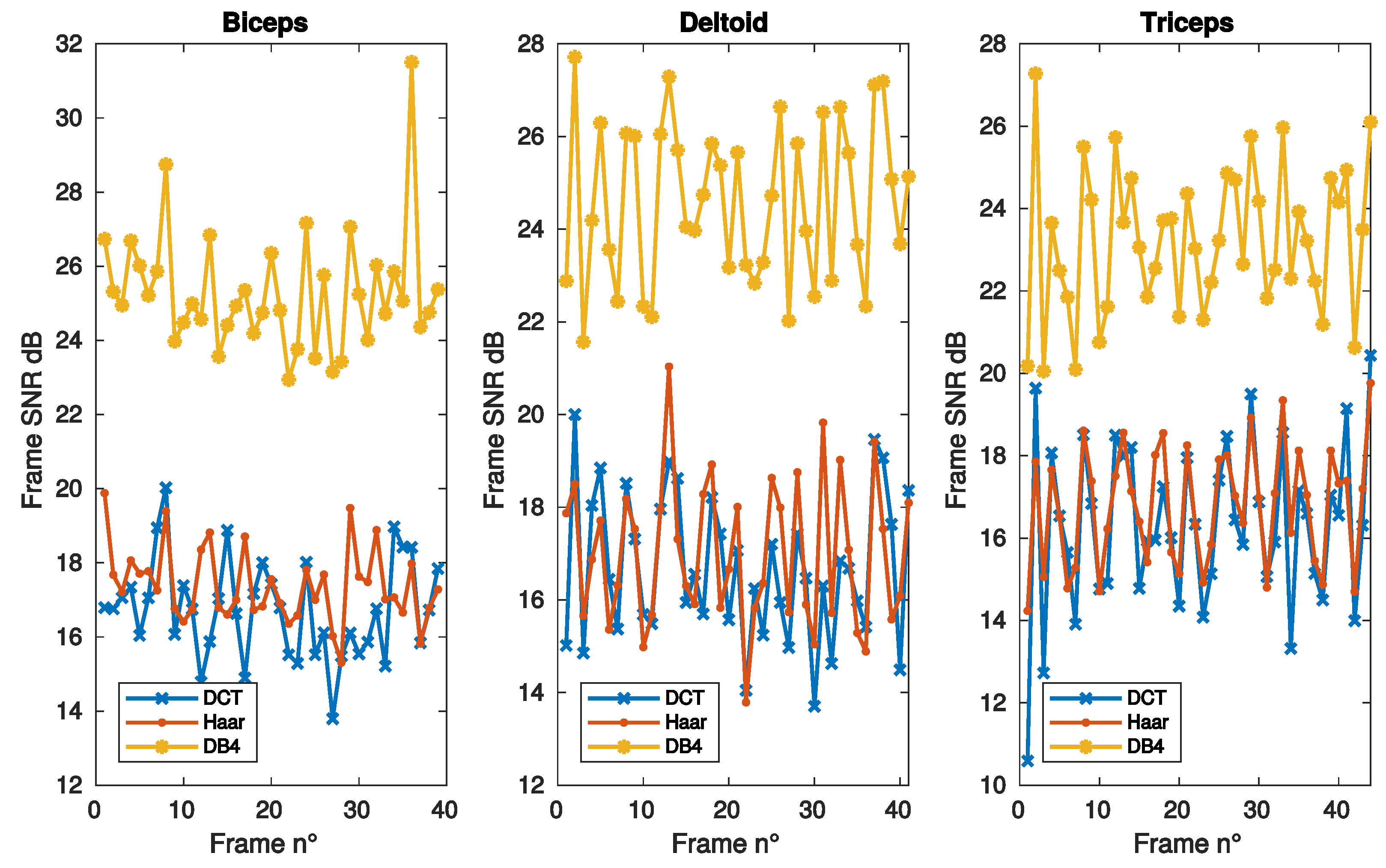
4.1.1. Basis Selection
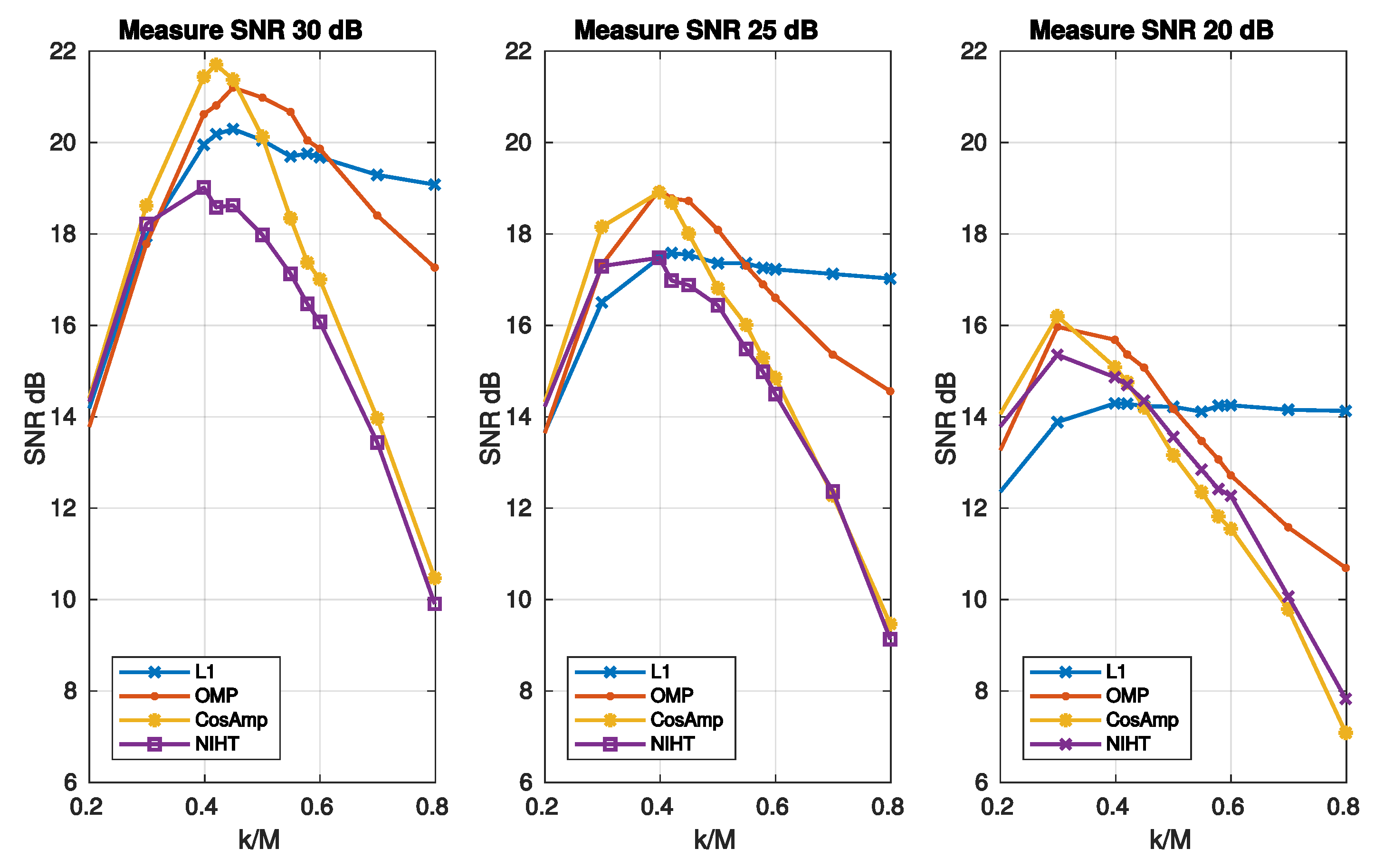
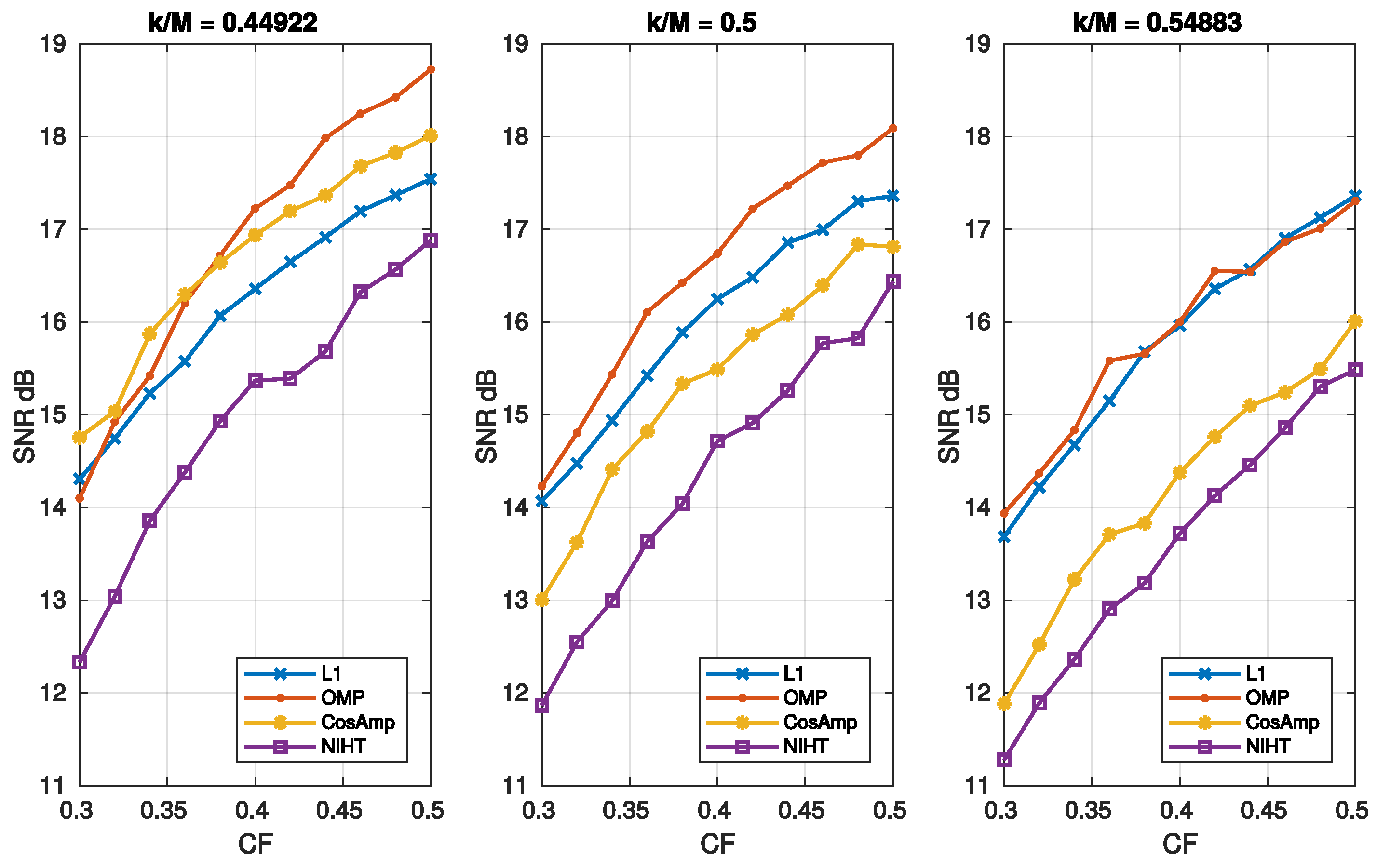
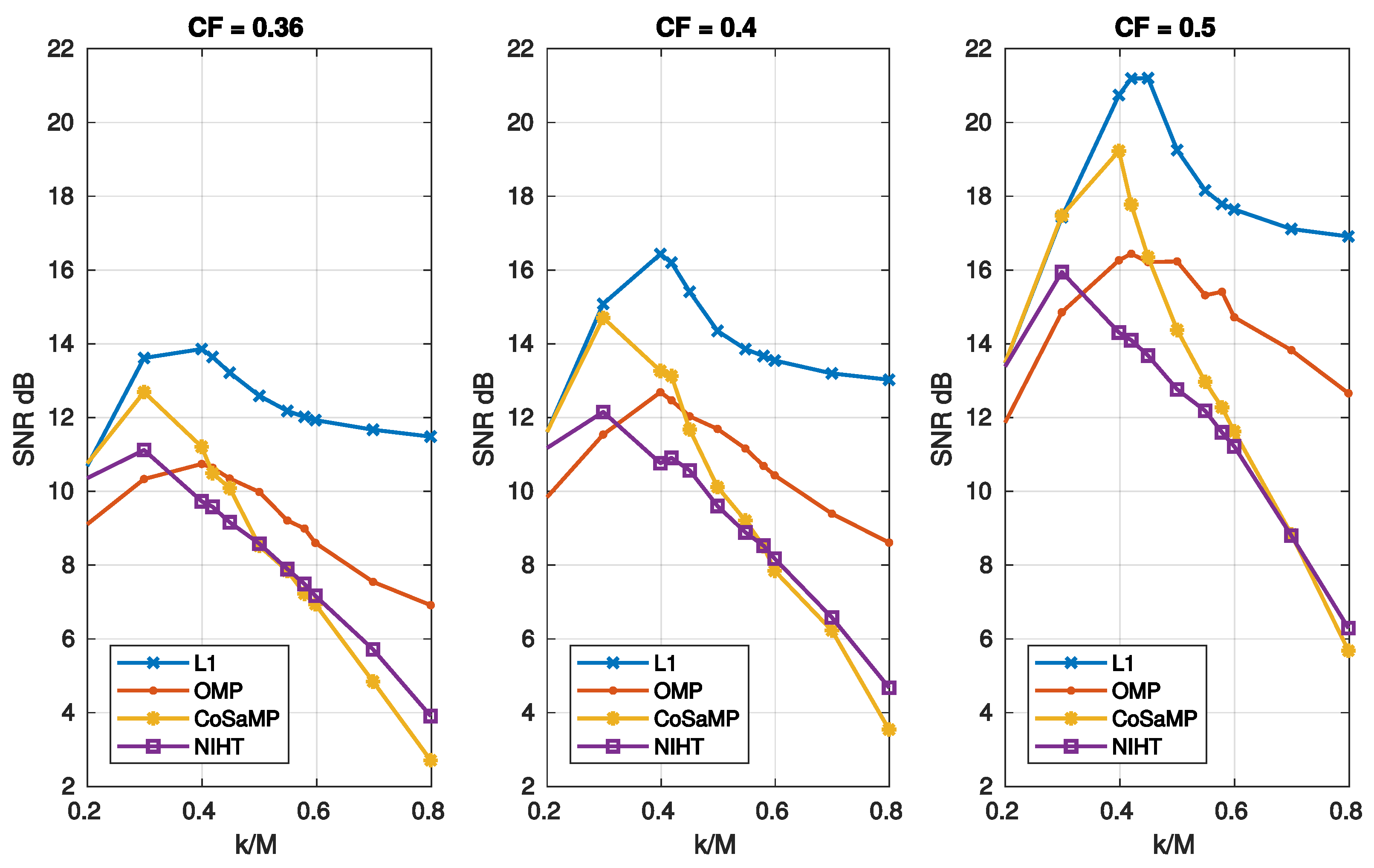
4.1.2. Comparison of Algorithms Performance
4.1.3. Noise Tolerance
4.2. Case Study B
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Naik, G.R.; Selvan, S.E.; Gobbo, M.; Acharyya, A.; Nguyen, H.T. Principal Component Analysis Applied to Surface Electromyography: A Comprehensive Review. IEEE Access 2016, 4, 4025–4037. [Google Scholar] [CrossRef]
- Merlo, A.; Farina, D.; Merletti, R. A fast and reliable technique for muscle activity detection from surface EMG signals. IEEE Trans. Biomed. Eng. 2003, 50, 316–323. [Google Scholar] [CrossRef] [PubMed]
- Fukuda, T.Y.; Echeimberg, J.O.; Pompeu, J.E.; Lucareli, P.R.G.; Garbelotti, S.; Gimenes, R.; Apolinário, A. Root mean square value of the electromyographic signal in the isometric torque of the quadriceps, hamstrings and brachial biceps muscles in female subjects. J. Appl. Res. 2010, 10, 32–39. [Google Scholar]
- Nawab, S.H.; Roy, S.H.; Luca, C.J.D. Functional activity monitoring from wearable sensor data. In Proceedings of the 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Francisco, CA, USA, 1–5 September 2004; Volume 1, pp. 979–982. [Google Scholar]
- Lee, S.Y.; Koo, K.H.; Lee, Y.; Lee, J.H.; Kim, J.H. Spatiotemporal analysis of EMG signals for muscle rehabilitation monitoring system. In Proceedings of the 2013 IEEE 2nd Global Conference on Consumer Electronics, Tokyo, Japan, 1–4 October 2013; pp. 1–2. [Google Scholar]
- Biagetti, G.; Crippa, P.; Curzi, A.; Orcioni, S.; Turchetti, C. Analysis of the EMG Signal During Cyclic Movements Using Multicomponent AM–FM Decomposition. IEEE J. Biomed. Health Inform. 2015, 19, 1672–1681. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.M.; Liu, S.H.; Wu, X.H. A wireless sEMG recording system and its application to muscle fatigue detection. Sensors 2012, 12, 489–499. [Google Scholar] [CrossRef]
- Ghasemzadeh, H.; Jafari, R.; Prabhakaran, B. A Body Sensor Network With Electromyogram and Inertial Sensors: Multimodal Interpretation of Muscular Activities. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 198–206. [Google Scholar] [CrossRef] [PubMed]
- Du, W.; Omisore, M.; Li, H.; Ivanov, K.; Han, S.; Wang, L. Recognition of Chronic Low Back Pain during Lumbar Spine Movements Based on Surface Electromyography Signals. IEEE Access 2018, 6, 65027–65042. [Google Scholar] [CrossRef]
- Spulber, I.; Georgiou, P.; Eftekhar, A.; Toumazou, C.; Duffell, L.; Bergmann, J.; McGregor, A.; Mehta, T.; Hernandez, M.; Burdett, A. Frequency analysis of wireless accelerometer and EMG sensors data: Towards discrimination of normal and asymmetric walking pattern. In Proceedings of the 2012 IEEE International Symposium on Circuits and Systems, Seoul, Korea, 20–23 May 2012; pp. 2645–2648. [Google Scholar]
- Zhang, X.; Chen, X.; Li, Y.; Lantz, V.; Wang, K.; Yang, J. A Framework for Hand Gesture Recognition Based on Accelerometer and EMG Sensors. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2011, 41, 1064–1076. [Google Scholar] [CrossRef]
- Rahimi, A.; Benatti, S.; Kanerva, P.; Benini, L.; Rabaey, J.M. Hyperdimensional biosignal processing: A case study for EMG-based hand gesture recognition. In Proceedings of the 2016 IEEE International Conference on Rebooting Computing (ICRC), San Diego, CA, USA, 17–19 October 2016; pp. 1–8. [Google Scholar]
- Brunelli, D.; Tadesse, A.M.; Vodermayer, B.; Nowak, M.; Castellini, C. Low-cost wearable multichannel surface EMG acquisition for prosthetic hand control. In Proceedings of the 2015 6th International Workshop on Advances in Sensors and Interfaces (IWASI), Gallipoli, Italy, 18–19 June 2015; pp. 94–99. [Google Scholar]
- Yang, D.; Jiang, L.; Huang, Q.; Liu, R.; Liu, H. Experimental Study of an EMG-Controlled 5-DOF Anthropomorphic Prosthetic Hand for Motion Restoration. J. Intell. Robot. Syst. 2014, 76, 427–441. [Google Scholar] [CrossRef]
- Oskoei, M.A.; Hu, H. Myoelectric control systems—A survey. Biomed. Signal Process. Control 2007, 2, 275–294. [Google Scholar] [CrossRef]
- Biagetti, G.; Crippa, P.; Falaschetti, L.; Turchetti, C. Classifier Level Fusion of Accelerometer and sEMG Signals for Automatic Fitness Activity Diarization. Sensors 2018, 18, 2850. [Google Scholar] [CrossRef] [PubMed]
- Roy, S.H.; Cheng, M.S.; Chang, S.S.; Moore, J.; Luca, G.D.; Nawab, S.H.; Luca, C.J.D. A Combined sEMG and Accelerometer System for Monitoring Functional Activity in Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 585–594. [Google Scholar] [CrossRef] [PubMed]
- Varshney, U. Pervasive Healthcare and Wireless Health Monitoring. Mob. Netw. Appl. 2007, 12, 113–127. [Google Scholar] [CrossRef]
- Movassaghi, S.; Abolhasan, M.; Lipman, J.; Smith, D.; Jamalipour, A. Wireless Body Area Networks: A Survey. IEEE Commun. Surv. Tutor. 2014, 16, 1658–1686. [Google Scholar] [CrossRef]
- Cavallari, R.; Martelli, F.; Rosini, R.; Buratti, C.; Verdone, R. A Survey on Wireless Body Area Networks: Technologies and Design Challenges. IEEE Commun. Surv. Tutor. 2014, 16, 1635–1657. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, F.; Shakhsheer, Y.; Silver, J.D.; Klinefelter, A.; Nagaraju, M.; Boley, J.; Pandey, J.; Shrivastava, A.; Carlson, E.J.; et al. A Batteryless 19 μW MICS/ISM-Band Energy Harvesting Body Sensor Node SoC for ExG Applications. IEEE J. Solid-State Circuits 2013, 48, 199–213. [Google Scholar] [CrossRef]
- Craven, D.; McGinley, B.; Kilmartin, L.; Glavin, M.; Jones, E. Compressed Sensing for Bioelectric Signals: A Review. IEEE J. Biomed. Health Inform. 2015, 19, 529–540. [Google Scholar] [CrossRef]
- Cao, D.; Yu, K.; Zhuo, S.; Hu, Y.; Wang, Z. On the Implementation of Compressive Sensing on Wireless Sensor Network. In Proceedings of the 2016 IEEE First International Conference on Internet-of-Things Design and Implementation (IoTDI), Berlin, Germany, 4–8 April 2016; pp. 229–234. [Google Scholar] [CrossRef]
- Ren, F.; Marković, D. A Configurable 12–237 kS/s 12.8 mW Sparse-Approximation Engine for Mobile Data Aggregation of Compressively Sampled Physiological Signals. IEEE J. Solid-State Circuits 2016, 51, 68–78. [Google Scholar]
- Kanoun, K.; Mamaghanian, H.; Khaled, N.; Atienza, D. A real-time compressed sensing-based personal electrocardiogram monitoring system. In Proceedings of the 2011 Design, Automation Test in Europe, Grenoble, France, 14–18 March 2011; pp. 1–6. [Google Scholar]
- Chen, F.; Chandrakasan, A.P.; Stojanovic, V.M. Design and Analysis of a Hardware-Efficient Compressed Sensing Architecture for Data Compression in Wireless Sensors. IEEE J. Solid-State Circuits 2012, 47, 744–756. [Google Scholar] [CrossRef]
- Mangia, M.; Paleari, M.; Ariano, P.; Rovatti, R.; Setti, G. Compressed sensing based on rakeness for surface ElectroMyoGraphy. In Proceedings of the 2014 IEEE Biomedical Circuits and Systems Conference (BioCAS) Proceedings, Cleveland, OH, USA, 17–19 October 2014; pp. 204–207. [Google Scholar]
- Marchioni, A.; Mangia, M.; Pareschil, F.; Rovatti, R.; Setti, G. Rakeness-based Compressed Sensing of Surface ElectroMyoGraphy for Improved Hand Movement Recognition in the Compressed Domain. In Proceedings of the 2018 IEEE Biomedical Circuits and Systems Conference (BioCAS), Cleveland, OH, USA, 17–19 October 2018; pp. 1–4. [Google Scholar]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Near-Optimal Signal Recovery From Random Projections: Universal Encoding Strategies? IEEE Trans. Inf. Theory 2006, 52, 5406–5425. [Google Scholar] [CrossRef]
- Donoho, D.L.; Stark, P.B. Uncertainty Principles and Signal Recovery. SIAM J. Appl. Math. 1989, 49, 906–931. [Google Scholar] [CrossRef]
- Candes, E.J.; Tao, T. Decoding by linear programming. IEEE Trans. Inf. Theory 2005, 51, 4203–4215. [Google Scholar] [CrossRef]
- Candes, E.J.; Romberg, J.; Tao, T. Robust uncertainty principles: Exact signal reconstruction from highly incomplete frequency information. IEEE Trans. Inf. Theory 2006, 52, 489–509. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B. An Introduction To Compressive Sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Qaisar, S.; Bilal, R.M.; Iqbal, W.; Naureen, M.; Lee, S. Compressive sensing: From theory to applications, a survey. J. Commun. Netw. 2013, 15, 443–456. [Google Scholar] [CrossRef]
- Tropp, J.A.; Wright, S.J. Computational Methods for Sparse Solution of Linear Inverse Problems. Proc. IEEE 2010, 98, 948–958. [Google Scholar] [CrossRef]
- Kim, S.; Koh, K.; Lustig, M.; Boyd, S.; Gorinevsky, D. An Interior-Point Method for Large-Scaleℓ1-Regularized Least Squares. IEEE J. Sel. Top. Signal Process. 2007, 1, 606–617. [Google Scholar] [CrossRef]
- Tropp, J.A. Greed is good: Algorithmic results for sparse approximation. IEEE Trans. Inf. Theory 2004, 50, 2231–2242. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal Recovery From Random Measurements Via Orthogonal Matching Pursuit. IEEE Trans. Inf. Theory 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Cai, X.; Zhou, Z.; Yang, Y.; Wang, Y. Improved Sufficient Conditions for Support Recovery of Sparse Signals Via Orthogonal Matching Pursuit. IEEE Access 2018, 6, 30437–30443. [Google Scholar] [CrossRef]
- Davis, G.; Mallat, S.; Avellaneda, M. Adaptive greedy approximations. Constr. Approx. 1997, 13, 57–98. [Google Scholar] [CrossRef]
- Pati, Y.C.; Rezaiifar, R.; Krishnaprasad, P.S. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the 27th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–3 November 1993; pp. 40–44. [Google Scholar]
- Needell, D.; Tropp, J. CoSaMP: Iterative signal recovery from incomplete and inaccurate samples. Appl. Comput. Harmon. Anal. 2009, 26, 301–321. [Google Scholar] [CrossRef]
- Dai, W.; Milenkovic, O. Subspace Pursuit for Compressive Sensing Signal Reconstruction. IEEE Trans. Inf. Theory 2009, 55, 2230–2249. [Google Scholar] [CrossRef]
- Blumensath, T.; Davies, M.E. Normalized Iterative Hard Thresholding: Guaranteed Stability and Performance. IEEE J. Sel. Top. Signal Process. 2010, 4, 298–309. [Google Scholar] [CrossRef]
- Ravelomanantsoa, A.; Rabah, H.; Rouane, A. Compressed Sensing: A Simple Deterministic Measurement Matrix and a Fast Recovery Algorithm. IEEE Trans. Instrum. Meas. 2015, 64, 3405–3413. [Google Scholar] [CrossRef]
- Ravelomanantsoa, A.; Rouane, A.; Rabah, H.; Ferveur, N.; Collet, L. Design and Implementation of a Compressed Sensing Encoder: Application to EMG and ECG Wireless Biosensors. Circuits Syst. Signal Process. 2017, 36, 2875–2892. [Google Scholar] [CrossRef]
- Shukla, K.K.; Tiwari, A.K. Efficient Algorithms for Discrete Wavelet Transform: With Applications to Denoising and Fuzzy Inference Systems; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Dixon, A.M.R.; Allstot, E.G.; Gangopadhyay, D.; Allstot, D.J. Compressed Sensing System Considerations for ECG and EMG Wireless Biosensors. IEEE Trans. Biomed. Circuits Syst. 2012, 6, 156–166. [Google Scholar] [CrossRef]
- Biagetti, G.; Crippa, P.; Falaschetti, L.; Orcioni, S.; Turchetti, C. A portable wireless sEMG and inertial acquisition system for human activity monitoring. Lect. Notes Comput. Sci. 2017, 10209 LNCS, 608–620. [Google Scholar]
- Biagetti, G.; Crippa, P.; Falaschetti, L.; Orcioni, S.; Turchetti, C. Human Activity Monitoring System Based on Wearable sEMG and Accelerometer Wireless Sensor Nodes. BioMed. Eng. OnLine 2018, 17 (Suppl. 1), 132. [Google Scholar] [CrossRef]
- PhysioBank. Available online: https://physionet.org/physiobank/ (accessed on 19 March 2019).
- Neuroelectric and Myoelectric Databases—Examples of Electromyograms. Available online: https://physionet.org/physiobank/database/emgdb/ (accessed on 19 March 2019).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description |
|---|---|
| ⊙ | element-wise product of two vectors, i.e., |
| ⊕ | bitwise XOR between two binary arrays |
| samples circular shift of vector x | |
| element-wise sign function of a vector x | |
| pseudo-inverse of matrix B | |
| support of x, the set of indices | |
| cardinality of the set (the number k of elements in the set) | |
| -norm of x | |
| -norm of x (for some ) | |
| sub-vector of x indexed by set | |
| sub-matrix of B made by columns indexed by set | |
| returns a set of k indexes corresponding to the largest values , | |
| returns a vector with the same elements of x in the sub-set and 0 elsewhere | |
| reduced operator |
| Algorithm | Accuracy | Noise Tolerance | Speed | Computational Cost |
|---|---|---|---|---|
| L1 | Excellent | Excellent | Excellent | |
| OMP | Good | Good | Bad | |
| CoSaMP | Fair | Fair | Good | |
| NIHT | Bad | Fair | Fair |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manoni, L.; Turchetti, C.; Falaschetti, L.; Crippa, P. A Comparative Study of Computational Methods for Compressed Sensing Reconstruction of EMG Signal. Sensors 2019, 19, 3531. https://doi.org/10.3390/s19163531
Manoni L, Turchetti C, Falaschetti L, Crippa P. A Comparative Study of Computational Methods for Compressed Sensing Reconstruction of EMG Signal. Sensors. 2019; 19(16):3531. https://doi.org/10.3390/s19163531
Chicago/Turabian StyleManoni, Lorenzo, Claudio Turchetti, Laura Falaschetti, and Paolo Crippa. 2019. "A Comparative Study of Computational Methods for Compressed Sensing Reconstruction of EMG Signal" Sensors 19, no. 16: 3531. https://doi.org/10.3390/s19163531
APA StyleManoni, L., Turchetti, C., Falaschetti, L., & Crippa, P. (2019). A Comparative Study of Computational Methods for Compressed Sensing Reconstruction of EMG Signal. Sensors, 19(16), 3531. https://doi.org/10.3390/s19163531