Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project

 , , , and
, , , and {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Project Overview
- Design and fabrication of an artificial nose (e-nose) adapted to the requirements of a mobile robot. Most of the e-noses used in mobile robotics are designed for measuring only the chemical concentration, aiming at tasks such as the creation of concentration maps and/or the search of the emission sources. In the context of the present project, it is necessary that the electronic nose is designed to also provide information on the type of gas, that is, be as effective as possible in the classification of the detected chemical volatile. The objective is, therefore, to combine both facets which requires integrating different sensor technologies into a single device.
- Gas classification and object recognition for robotics applications. The robot, equipped with a vision system (e.g., one or multiple RGB or RGB-D cameras) and an electronic nose, could successfully improve the vision-based recognition of simple objects, exploiting the odor information gathered in the surroundings, as well as enhancing the gas classification when considering the semantic information and the probabilistic categorization of the detected object.
- Exploiting high-level olfactory and visual semantic information in the planning and execution of tasks. Semantics provide additional human-like information to the perceived elements. For example, a high concentration of gases related to rotten food suggest that somebody forgot about it. Semantic information can be exploited to automatically infer new robot tasks in order to maintain a set of pre-stablished human-like norms, in this case, rotten food should be taken out of the house [12]. Among the multiple tasks that can benefit from such inference process, we focus on the challenging task of source localization with a mobile robot in indoor environments, aiming at minimizing the necessary time to locate the object emanating the gases in the environment.
3. Hardware Description
3.1. Electronic Noses
3.2. Mobile Robots
- Rhodon is a laboratory robot built upon a commercial PatrolBot platform (refer to Figure 2a), capable of being tele-operated or even to autonomously navigate (i.e., self localization and obstacle avoidance) by using a pair of 2D laser scanners: a SICK PLS (front) and a Hokuyo URG (back). The on-board PC controls both the navigation and data acquisition by means of a set of software modules running within a ROS framework. Since the experiments described in this paper corresponds to different stages of the IRO project and aimed to different purposes, diverse robot setups have been adopted, as specified in Section 4. The Rhodon robot has been available from the beginning of the IRO project, and is capable of carrying heavy loads, becoming ideal for the attachment of a robotic arm used in one of the experiments.
- The second robotic platform employed is the so called Giraff robot [21,22]. It has been used during the experiments regarding object recognition, as described in Section 6. In a nutshell, it is a telepresence robotic platform equipped with a frontal 2D laser range finder for navigation and localization, and a set of RGB-D cameras to capture 3D information from the environment (see Figure 2b). The Giraff robot became available later during the project and, as it is lighter and easier to transport than Rhodon, it was chosen for the experiments related to semantics, due to the need for recording visual measurements in a real house.
4. Gas Recognition and Classification for Robotic Applications
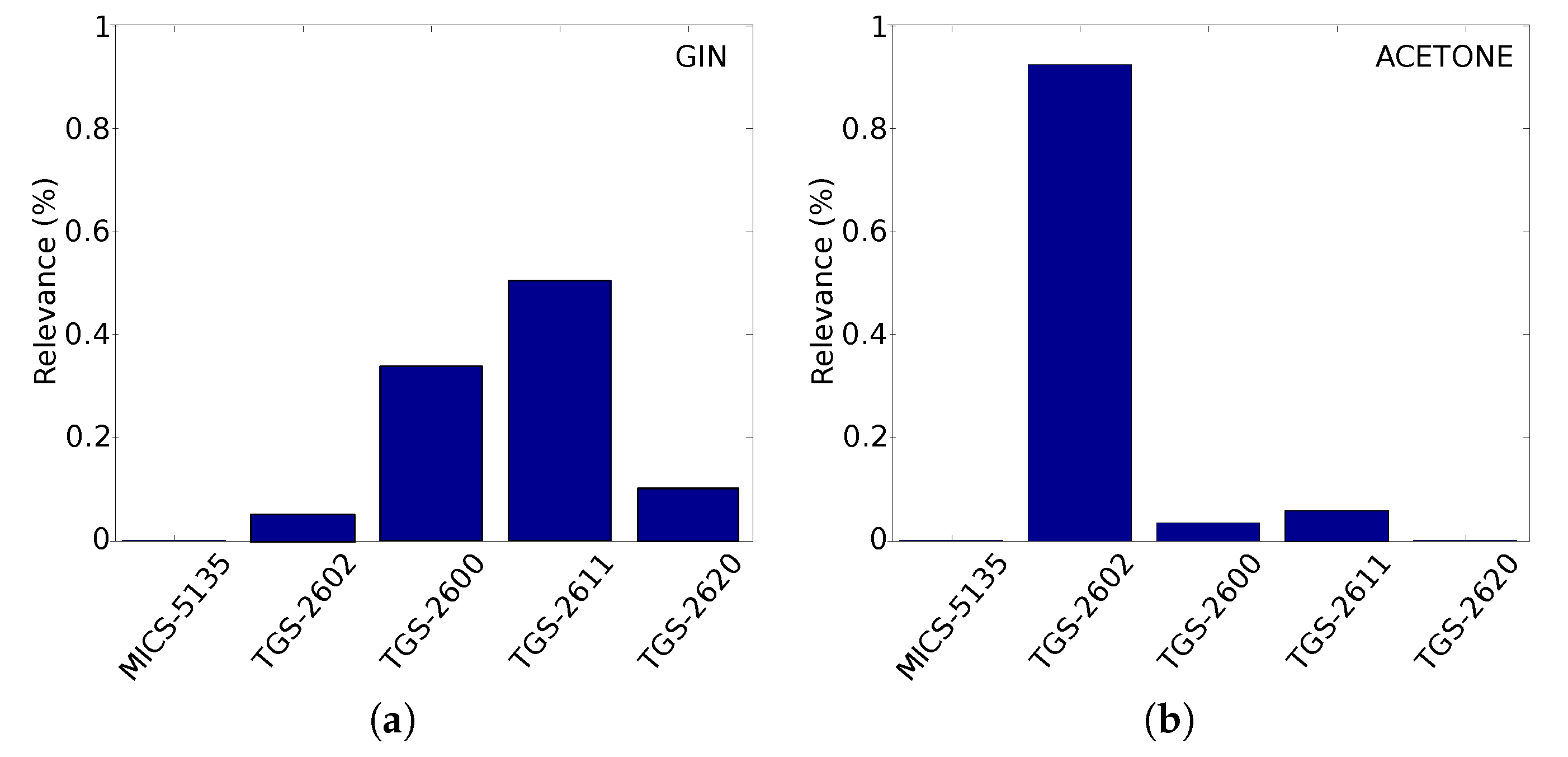
4.1. Gas Classification
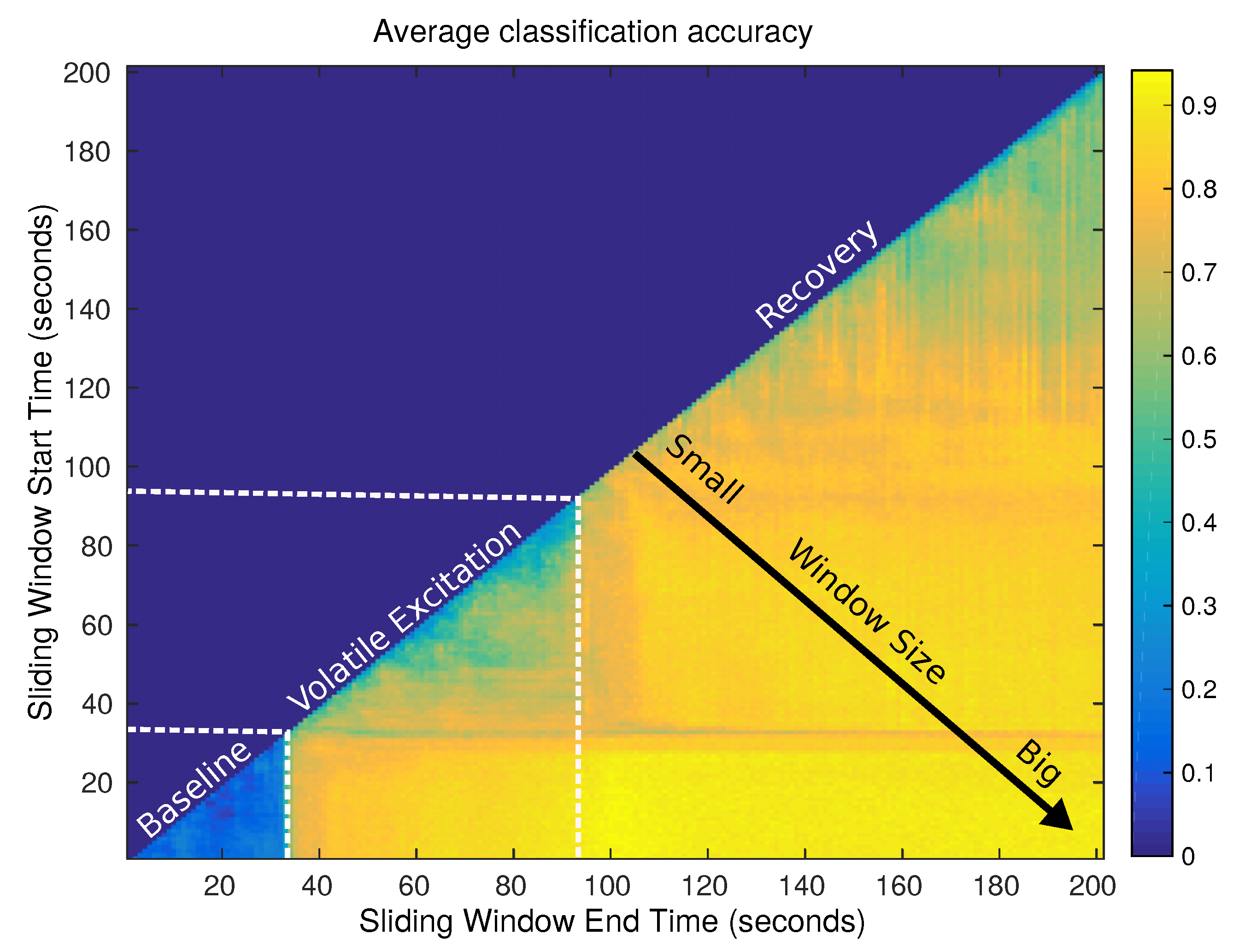
4.2. Continuous Chemical Classification
4.3. Gas Classification in Motion
5. Object Recognition and Semantic Knowledge for Robotic Applications
6. Exploiting High-Level Olfactory and Visual Semantic Information in the Planning and Execution of Tasks
6.1. Olfactory Telerobotics
6.2. Semantic-Based Autonomous Gas Source Localization
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Shepherd, G.M. The human sense of smell: Are we better than we think? PLoS Biol. 2004, 2, e146. [Google Scholar] [CrossRef] [PubMed]
- Leite, I.; Martinho, C.; Paiva, A. Social Robots for Long-Term Interaction: A Survey. Int. J. Soc. Robot. 2013, 5, 291–308. [Google Scholar] [CrossRef]
- Truong, X.; Ngo, T. “To Approach Humans?”: A Unified Framework for Approaching Pose Prediction and Socially Aware Robot Navigation. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 557–572. [Google Scholar] [CrossRef]
- Palacín, J.; Martínez, D.; Clotet, E.; Pallejà, T.; Burgués, J.; Fonollosa, J.; Pardo, A.; Marco, S. Application of an array of Metal-Oxide Semiconductor gas sensors in an assistant personal robot for early gas leak detection. Sensors 2019, 19, 1957. [Google Scholar] [CrossRef] [PubMed]
- Vincent, T.A.; Xing, Y.; Cole, M.; Gardner, J.W. Investigation of the response of high-bandwidth MOX sensors to gas plumes for application on a mobile robot in hazardous environments. Sens. Actuators B Chem. 2019, 279, 351–360. [Google Scholar] [CrossRef]
- Röck, F.; Barsan, N.; Weimar, U. Electronic nose: Current status and future trends. Chem. Rev. 2008, 108, 705–725. [Google Scholar] [CrossRef]
- Monroy, J.; Palomo, E.J.; Lopez-Rubio, E.; Gonzalez-Jimenez, J. Continuous Chemical Classification in Uncontrolled Environments with Sliding Windows. Chemom. Intell. Lab. Syst. 2016, 158, 117–129. [Google Scholar] [CrossRef]
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. An Electronic Architecture for Multi-Purpose Artificial Noses. J. Sens. 2018, 2018, 5427693. [Google Scholar] [CrossRef]
- Sanchez-Garrido, C.; Monroy, J.; Gonzalez-Jimenez, J. A Configurable Smart E-Nose for Spatio-Temporal Olfactory Analysis. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1968–1971. [Google Scholar] [CrossRef]
- Monroy, J.; Gonzalez-Jimenez, J. Towards Odor-Sensitive Mobile Robots. In Electronic Nose Technologies and Advances in Machine Olfaction; IGI Global: Hershey, PA, USA, 2018; pp. 244–263. [Google Scholar]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Probability and Common-Sense: Tandem Towards Robust Robotic Object Recognition in Ambient Assisted Living. In Proceedings of the 10th International Conference on Ubiquitous Computing and Ambient Intelligence, Las Palmas de Gran Canaria, Spain, 29 November–2 December 2016; Volume 10070. [Google Scholar] [CrossRef]
- Galindo, C.; Saffiotti, A. Inferring robot goals from violations of semantic knowledge. Robot. Auton. Syst. 2013, 61, 1131–1143. [Google Scholar] [CrossRef]
- Gutierrez-Osuna, R.; Nagle, H.T. A method for evaluating data-preprocessing techniques for odour classification with an array of gas sensors. IEEE Trans. Syst. Man Cybern. Part B 1999, 29, 626–632. [Google Scholar] [CrossRef]
- Gunter, A.T.; Koren, V.; Chikkadi, K.; Righettoni, M.; Pratsinis, S.E. E-nose sensing of low-ppb formaldehyde in gas mixtures at high relative humidity for breath screening of lung cancer. Acs Sens. 2016, 1, 528–535. [Google Scholar] [CrossRef]
- Monroy, J.; Lilienthal, A.; Blanco, J.L.; Gonzalez-Jimenez, J.; Trincavelli, M. Probabilistic Gas Quantification with MOX Sensors in Open Sampling Systems—A Gaussian Process Approach. Sens. Actuators B Chem. 2013, 188, 298–312. [Google Scholar] [CrossRef]
- Kim, H.J.; Lee, J.H. Highly sensitive and selective gas sensors using p-type oxide semiconductors: Overview. Sens. Actuators B Chem. 2014, 192, 607–627. [Google Scholar] [CrossRef]
- Ponzoni, A.; Comini, E.; Sberveglieri, G.; Zhou, J.; Deng, S.Z.; Xu, N.S.; Ding, Y.; Wang, Z.L. Ultrasensitive and highly selective gas sensors using three-dimensional tungsten oxide nanowire networks. Appl. Phys. Lett. 2006, 88, 203101. [Google Scholar] [CrossRef]
- Cui, S.; Wang, J.; Yang, L.; Wu, J.; Wang, X. Qualitative and quantitative analysis on aroma characteristics of ginseng at different ages using E-nose and GC–MS combined with chemometrics. J. Pharm. Biomed. Anal. 2015, 102, 64–77. [Google Scholar] [CrossRef] [PubMed]
- Monroy, J.; Gonzalez-Jimenez, J.; Blanco, J.L. Overcoming the slow recovery of MOX gas sensors through a system modeling approach. Sensors 2012, 12, 13664–13680. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez-Jimenez, J.; Monroy, J.; Blanco, J.L. The Multi-Chamber Electronic Nose–An Improved Olfaction Sensor for Mobile Robotics. Sensors 2011, 11, 6145–6164. [Google Scholar] [CrossRef]
- Coradeschi, S.; Cesta, A.; Cortellessa, G.; Coraci, L.; Galindo, C.; Gonzalez-Jimenez, J.; Karlsson, L.; Forsberg, A.; Frennert, S.; Furfari, F.; et al. GiraffPlus: A System for Monitoring Activities and Physiological Parameters and Promoting Social Interaction for Elderly. In Human-Computer Systems Interaction: Backgrounds and Applications 3; Springer: Cham, Switzerland, 2014; pp. 261–271. [Google Scholar]
- Luperto, M.; Monroy, J.; Ruiz-Sarmiento, J.R.; Moreno, F.A.; Basilico, N.; Gonzalez-Jimenez, J.; Borghese, N.A. Towards Long-Term Deployment of a Mobile Robot for at-Home Ambient Assisted Living of the Elderly. In Proceedings of the European Conference on Mobile Robots, Prague, Czech Republic, 4–6 September 2019. [Google Scholar]
- Trincavelli, M.; Coradeschi, S.; Loutfi, A. Odour classification system for continuous monitoring applications. Sens. Actuators B Chem. 2009, 139, 265–273. [Google Scholar] [CrossRef]
- Onkal-Engin, G.; Demir, I.; Engin, S.N. Determination of the relationship between sewage odour and BOD by neural networks. Environ. Model. Softw. 2005, 20, 843–850. [Google Scholar] [CrossRef]
- Monroy, J.; Gonzalez-Jimenez, J.; Sanchez-Garrido, C. Monitoring Household Garbage Odors in Urban Areas Through Distribution Maps. In Proceedings of the IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1364–1367. [Google Scholar] [CrossRef]
- Hasenfratz, D.; Saukh, O.; Walser, C.; Hueglin, C.; Fierz, M.; Arn, T.; Beutel, J.; Thiele, L. Deriving high-resolution urban air pollution maps using mobile sensor nodes. Pervasive Mob. Comput. 2015, 16, 268–285. [Google Scholar] [CrossRef]
- Guo, D.; Zhang, D.; Li, N.; Zhang, L.; Yang, J. A novel breath analysis system based on electronic olfaction. IEEE Trans. Biomed. Eng. 2010, 57, 2753–2763. [Google Scholar] [CrossRef]
- Gibb, K.A.; Yee, A.S.; Johnston, C.C.; Martin, S.D.; Nowak, R.M. Accuracy and usefulness of a breath alcohol analyzer. Ann. Emerg. Med. 1984, 13, 516–520. [Google Scholar] [CrossRef]
- Hlastala, M.P. The alcohol breath test—A review. J. Appl. Physiol. 1998, 84, 401–408. [Google Scholar] [CrossRef] [PubMed]
- Marques, L.; Nunes, U.; de Almeida, A.T. Olfaction-based mobile robot navigation. Thin Solid Film. 2002, 418, 51–58. [Google Scholar] [CrossRef]
- Vergara, A.; Fonollosa, J.; Mahiques, J.; Trincavelli, M.; Rulkov, N.; Huerta, R. On the performance of gas sensor arrays in open sampling systems using Inhibitory Support Vector Machines. Sens. Actuators B Chem. 2013, 185, 462–477. [Google Scholar] [CrossRef]
- Trincavelli, M. Gas discrimination for mobile robots. KI-Künst. Intell. 2011, 25, 351–354. [Google Scholar] [CrossRef]
- Fu, T.C. A review on time series data mining. Eng. Appl. Artif. Intell. 2011, 24, 164–181. [Google Scholar] [CrossRef]
- Schleif, F.M.; Hammer, B.; Monroy, J.; Gonzalez-Jimenez, J.; Blanco, J.L.; Biehl, M.; Petkov, N. Odor recognition in robotics applications by discriminative time-series modeling. Pattern Anal. Appl. 2016, 19, 207–220. [Google Scholar] [CrossRef]
- Monroy, J.; Gonzalez-Jimenez, J. Gas Classification in Motion: An Experimental Analysis. Sens. Actuators B. Chem. 2017, 240, 1205–1215. [Google Scholar] [CrossRef]
- Galleguillos, C.; Belongie, S. Context Based Object Categorization: A Critical Survey. Comput. Vis. Image Underst. 2010, 114, 712–722. [Google Scholar] [CrossRef]
- Oliva, A.; Torralba, A. The role of context in object recognition. Trends Cogn. Sci. 2007, 11, 520–527. [Google Scholar] [CrossRef] [PubMed]
- Koller, D.; Friedman, N. Probabilistic Graphical Models: Principles and Techniques-Adaptive Computation and Machine Learning; The MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Uschold, M.; Gruninger, M. Ontologies: Principles, methods and applications. Knowl. Eng. Rev. 1996, 11, 93–136. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. A survey on learning approaches for Undirected Graphical Models. Application to scene object recognition. Int. J. Approx. Reason. 2017, 83, 434–451. [Google Scholar] [CrossRef]
- Murphy, K.P.; Weiss, Y.; Jordan, M.I. Loopy Belief Propagation for Approximate Inference: An Empirical Study. In Proceedings of the Fifteenth Conference on Uncertainty in Artificial Intelligence, Stockholm, Sweden, 30 July–1 August 1999; pp. 467–475. [Google Scholar]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Robot@Home, a robotic dataset for semantic mapping of home environments. Int. J. Robot. Res. 2017, 36, 131–141. [Google Scholar] [CrossRef]
- Ruiz-Sarmiento, J.R.; Galindo, C.; Gonzalez-Jimenez, J. Building Multiversal Semantic Maps for Mobile Robot Operation. Knowl. Based Syst. 2017, 119, 257–272. [Google Scholar] [CrossRef]
- Galindo, C.; Saffiotti, A.; Coradeschi, S.; Buschka, P.; Fernandez-Madrigal, J.A.; Gonzalez, J. Multi-hierarchical semantic maps for mobile robotics. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 2278–2283. [Google Scholar] [CrossRef]
- Kostavelis, I.; Gasteratos, A. Semantic mapping for mobile robotics tasks: A survey. Robot. Auton. Syst. 2015, 66, 86–103. [Google Scholar] [CrossRef]
- Kam, M.; Zhu, X.; Kalata, P. Sensor fusion for mobile robot navigation. Proc. IEEE 1997, 85, 108–119. [Google Scholar] [CrossRef]
- Kowadlo, G.; Russell, R.A. Robot odor localization: A taxonomy and survey. Int. J. Robot. Res. 2008, 27, 869–894. [Google Scholar] [CrossRef]
- Monroy, J.; Melendez-Fernandez, F.; Gongora, A.; Gonzalez-Jimenez, J. Integrating Olfaction in a Robotic Telepresence Loop. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28 August–1 September 2017; pp. 1012–1017. [Google Scholar] [CrossRef]
- Monroy, J.; Ruiz-Sarmiento, J.R.; Moreno, F.A.; Galindo, C.; Gonzalez-Jimenez, J. Towards a Semantic Gas Source Localization under Uncertainty. In Proceedings of the International Conference on Information Processing and Management of Uncertainty in Knowledge-Based Systems, Cádiz, Spain, 11–15 June 2018; pp. 504–516. [Google Scholar] [CrossRef]
- Gongora, A.; Monroy, J.; Gonzalez-Jimenez, J. A Robotic Experiment Toward Understanding Human Gas-Source Localization Strategies. In Proceedings of the 2017 ISOCS/IEEE International Symposium on Olfaction and Electronic Nose (ISOEN), Montreal, QC, Canada, 28–31 May 2017; pp. 1–3. [Google Scholar] [CrossRef]
- Gongora, A.; Gonzalez-Jimenez, J. Olfactory telerobotics. A feasible solution for teleoperated localization of gas sources? Robot. Auton. Syst. 2019, 113, 1–9. [Google Scholar] [CrossRef]
- Ishida, H.; Tanaka, H.; Taniguchi, H.; Moriizumi, T. Mobile robot navigation using vision and olfaction to search for a gas/odor source. Auton. Robot. 2006, 20, 231–238. [Google Scholar] [CrossRef]
- Monroy, J.; Ruiz-Sarmiento, J.R.; Moreno, F.A.; Melendez-Fernandez, F.; Galindo, C.; Gonzalez-Jimenez, J. A Semantic-Based Gas Source Localization with a Mobile Robot Combining Vision and Chemical Sensing. Sensors 2018, 18, 4174. [Google Scholar] [CrossRef] [PubMed]
- Monroy, J.; Hernandez-Bennetts, V.; Fan, H.; Lilienthal, A.; Gonzalez-Jimenez, J. GADEN: A 3D Gas Dispersion Simulator for Mobile Robot Olfaction in Realistic Environments. Sensors 2017, 17, 1479. [Google Scholar] [CrossRef] [PubMed]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monroy, J.; Ruiz-Sarmiento, J.-R.; Moreno, F.-A.; Galindo, C.; Gonzalez-Jimenez, J. Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project. Sensors 2019, 19, 3488. https://doi.org/10.3390/s19163488
Monroy J, Ruiz-Sarmiento J-R, Moreno F-A, Galindo C, Gonzalez-Jimenez J. Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project. Sensors. 2019; 19(16):3488. https://doi.org/10.3390/s19163488
Chicago/Turabian StyleMonroy, Javier, Jose-Raul Ruiz-Sarmiento, Francisco-Angel Moreno, Cipriano Galindo, and Javier Gonzalez-Jimenez. 2019. "Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project" Sensors 19, no. 16: 3488. https://doi.org/10.3390/s19163488
APA StyleMonroy, J., Ruiz-Sarmiento, J.-R., Moreno, F.-A., Galindo, C., & Gonzalez-Jimenez, J. (2019). Olfaction, Vision, and Semantics for Mobile Robots. Results of the IRO Project. Sensors, 19(16), 3488. https://doi.org/10.3390/s19163488