1. Introduction
Surfing is a popular sport all over the world and can be practiced in both leisurely or competitive ways. Minimal training and equipment makes this an appealing water sport for people to experiment and enjoy. Surfing consists in riding a surfboard along the unbroken section (or wall) of a wave, as it travels towards the shore. The main piece of equipment required to perform this sport is a foam and fibreglass surfboard, where the surf practitioner is expected to stand up erect on his feet in a wave ride [
1].
Lately, the market demand for surfboards has shown an increase in volume, mainly for advanced level surf practitioners. This market is expected to grow 12.24% during 2018–2022 [
2]. Due to its increasing popularity worldwide, new surf-related solutions have been developed in order to assist surfers in catching the best waves. For example, surf-specific websites such as
MagicSeaWeed [
3] or
Windguru [
4] provide weather forecast and sea conditions, constituting an essential tool for passionate surfers. Following this trend, the analysis and extraction of performance-related measurements to create automatic and accurate surf session profiles shall constitute an appealing and challenging research area with high commercial potential [
1], as there is, indeed, limited available information for surf practitioners and coaches in terms of key performance analytics that are currently quite commonly present for other sports [
1,
5]. Most of these sports monitoring systems generate biofeedback based on sensor data retrieved during the training session [
5,
6,
7], and are capable of providing useful information about the executed movements, as they are correctly or incorrectly performed [
6,
7]. Moreover, in surfing, as in most sports, evolving towards more sophisticated movements or manoeuvres requires the mentoring of a more experienced person, such as an instructor or coach; sensorisation and movement quantification can also assist this process.
A surf session is usually constituted by four main events: paddle, stationary, wave riding and miscellaneous events (i.e., events such as wading or duck diving that seldom occur) [
8]. Wave riding is the most important activity; however, it only typifies 3.8% of the surf session’s total time. Miscellaneous events have a low impact in the overall session, representing only 2.2%. The major events are paddling, accounting for 51–54% of the total session time, and stationary events, such as sitting or laying on the board (42.5%) [
9]. This distribution presents its own challenges in terms of developing surf monitoring solutions, due to the scarcity of some activities; in particular, wave riding, the most important surfing event, is very rare, increasing the difficulty to accurately annotate and monitor it.
Currently, most solutions base their estimations of speed, distance and movement patterns on Global Positioning System (GPS) measurements [
10,
11,
12,
13], using them to evaluate the performance of the surfer [
5,
14]. However, given the nature of this sport, and especially during manoeuvres, short and very intense periods of activity may be inaccurately characterised when solely using GPS data, making the estimated surf-related metrics unreliable [
5,
14,
15]. Moreover, stronger accelerations have been proven to negatively impact instantaneous velocity measurements provided by GPS data alone, i.e., higher accelerations frequently compromise the GPS’ speed estimation [
5,
15]. This is extremely relevant in the context of a surf session, since these solutions may not be suitable for computing performance-related metrics with the validity and reliability that surf practitioners need. These limitations could be mitigated by combining the use of GPS with a secondary source of data, namely inertial sensors [
6,
7,
10,
16,
17,
18]. Indeed, Chambers et al. [
6] stated that, in sport performance analytics, speed and distance calculations are frequently performed using GPS, but sport-specific movements are identified and characterised using inertial sensors. These sensors are widely spread and increasing its popularity, especially for biomedical and sports applications [
7,
19,
20], due to its small size, low cost, low energy requirements and the fact that they are embedded in many ubiquitous devices. Inertial measurement units (IMU) are usually composed by a triaxial accelerometer, gyroscope and magnetometer, measuring acceleration, angular velocity and magnetic field intensity, respectively, and are generally used to estimate position and orientation by tracking rotational and translational movements [
7,
16]. Several strategies have been proposed in recent years to overcome the most common inertial measurement-related errors (e.g., drift), usually based on sensor fusion methods which try to compensate for each sensor’s well-known sources of error by employing sophisticated filtering techniques, which ultimately output reliable orientation estimations [
16,
20].
This context motivated the development of a new algorithm for the detection and characterisation of surf session events from intermediate to advanced level surfers, combining both IMU and GPS data sources to achieve the most reliable outcome possible. In this sense, this manuscript presents an extension of the work reported in [
17], with an extended validation of the entire surf session profiling algorithm, namely concerning wave detection performance, with an improved dataset comprising approximately 7.5 h of annotated data and featuring a total of 327 waves, and an additional contribution:
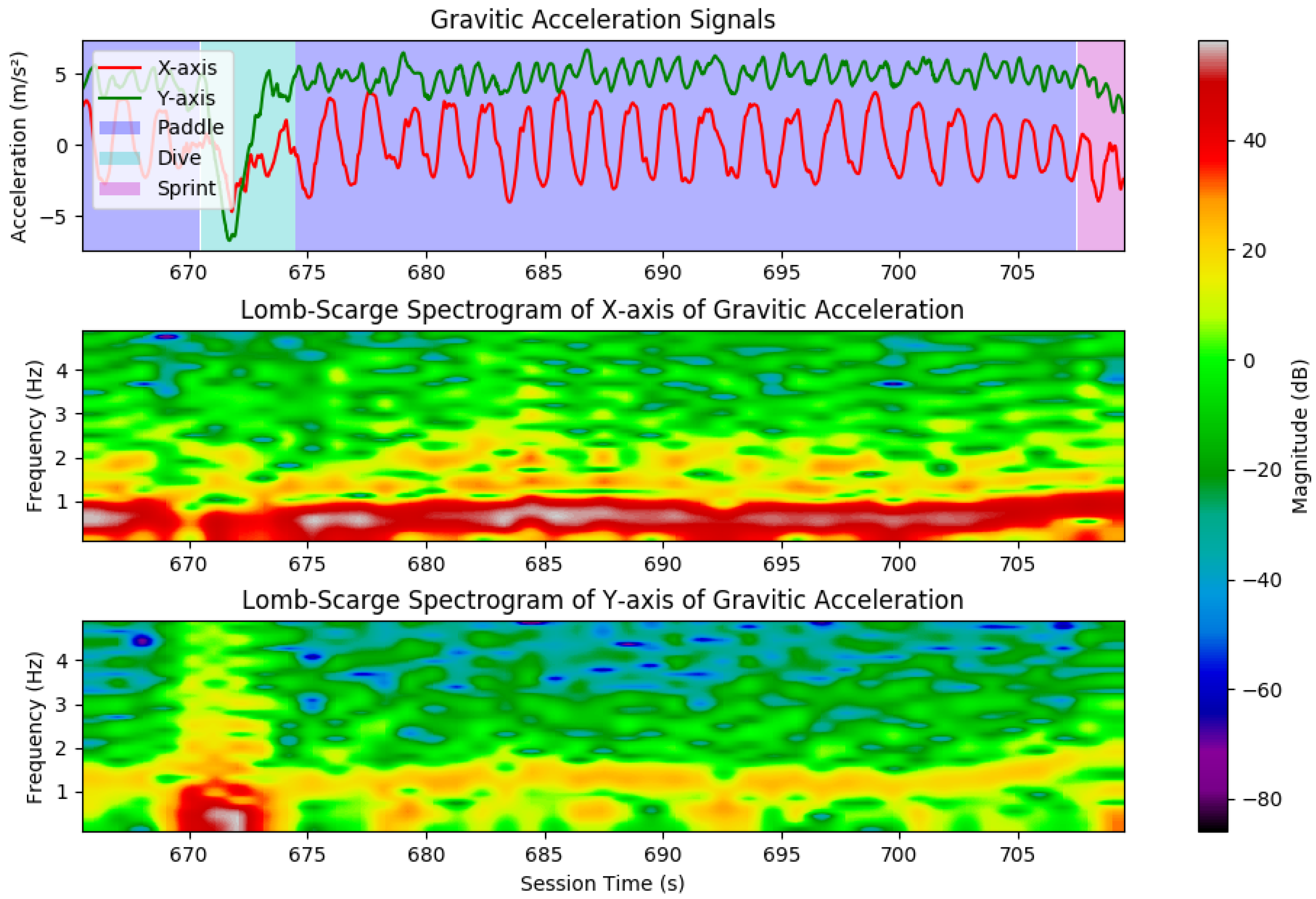
• Introduction of a novel and improved module of laying events classification, focusing in the distinction of paddle, sprint paddle, dives, and idle laying, using frequency-domain features.
The remainder of the paper is organised as follows.
Section 2 describes the prior work conducted in this field.
Section 3 describes all necessary equipment and methodology, which made this study possible.
Section 4 and
Section 5 report and discuss the main findings, respectively. Finally,
Section 6 highlights the main conclusions of this study and points out possible directions for future work.
2. Related Work
There are a few commercially available solutions for surf monitoring.
Rip Curl Search GPS watch [
11] uses GPS signals to perform some estimations and deliver a few surf-related metrics, such as wave count, travelled distance and wave speed. Solutions which mostly rely on GPS data alone to perform their core estimations are hardly able to detect complex surfing movements, such as in-wave manoeuvres, and may lack precision in the determination of the boundaries of some events (e.g., take-off and end-ride moments). Some mobile applications have also been developed (e.g.,
Surf Track [
21],
Dawn Patrol [
22], and
WavesTracker [
23]), but very little information is provided regarding their functioning, performance and system setup.
Glassy Pro is a wristband which combines GPS and inertial sensor data, namely the accelerometer and gyroscope sensors, in order to improve detection and characterisation of surf-related events [
12]. GPS data are mostly used for wave detection while inertial sensors are used to explore and detect other events, such as paddling periods. The fact that it is intended to be a wrist-worn device has both advantages and disadvantages. On the one hand, it is practical and mostly unobtrusive. On the other hand, monitoring surf movements based on wrist motion may be insufficient to retrieve the most useful information in some cases, especially during wave rides, in particular if one intends to monitor rotations. Torso and board rotation are important metrics for wave performance analysis and these will most likely be lost if wrist movement is the only one under analysis, due to the variety of movements of great amplitude enabled by the shoulder joint.
Trace Up is a dedicated device designed to be placed in the nose of the surfboard. It uses GPS and inertial sensors (gyroscope and magnetometer) to identify and analyse complex surf movements during a session [
13]. By combining several sources of data and their strategic placement on the board, it can provide information about wave riding times, distance, speed, number of turns and turn angle values. While this device provides a handful of useful features for surf monitoring, no performance evaluation studies were found to validate its detections and measurements. In addition, to the best of the authors’ knowledge, this product is no longer available for tracking surf sessions, since the scope of the company has evolved for focusing solely in football tracking [
13].
Xensr Air is another product, very similar to the previous [
24]; the device was also designed to be mounted in the surfboard, and uses GPS and a sensor fusion approach to monitor and extract surf session metrics; however, to best of the authors’ knowledge, this product is currently unavailable for purchase [
24].
Besides commercially available solutions, some research studies also aim at surf monitoring and/or performance analysis. Madureira et al. [
10] proposed an algorithm for wave detection which compared the use of GPS sensor alone against its combination with inertial sensors data, placing a smartphone on the upper back of the surfer. The results indicate that wave detection is more accurate when the algorithm uses both data sources (inertial and positioning sensors). This finding is consistent with that of our previous work [
17], which tested this premise under more demanding circumstances and with a significantly bigger dataset. The addition of inertial sensors also improved their definition of wave boundaries. Moreover, false positives were more frequent when using only speed estimation from GPS as a feature [
10].
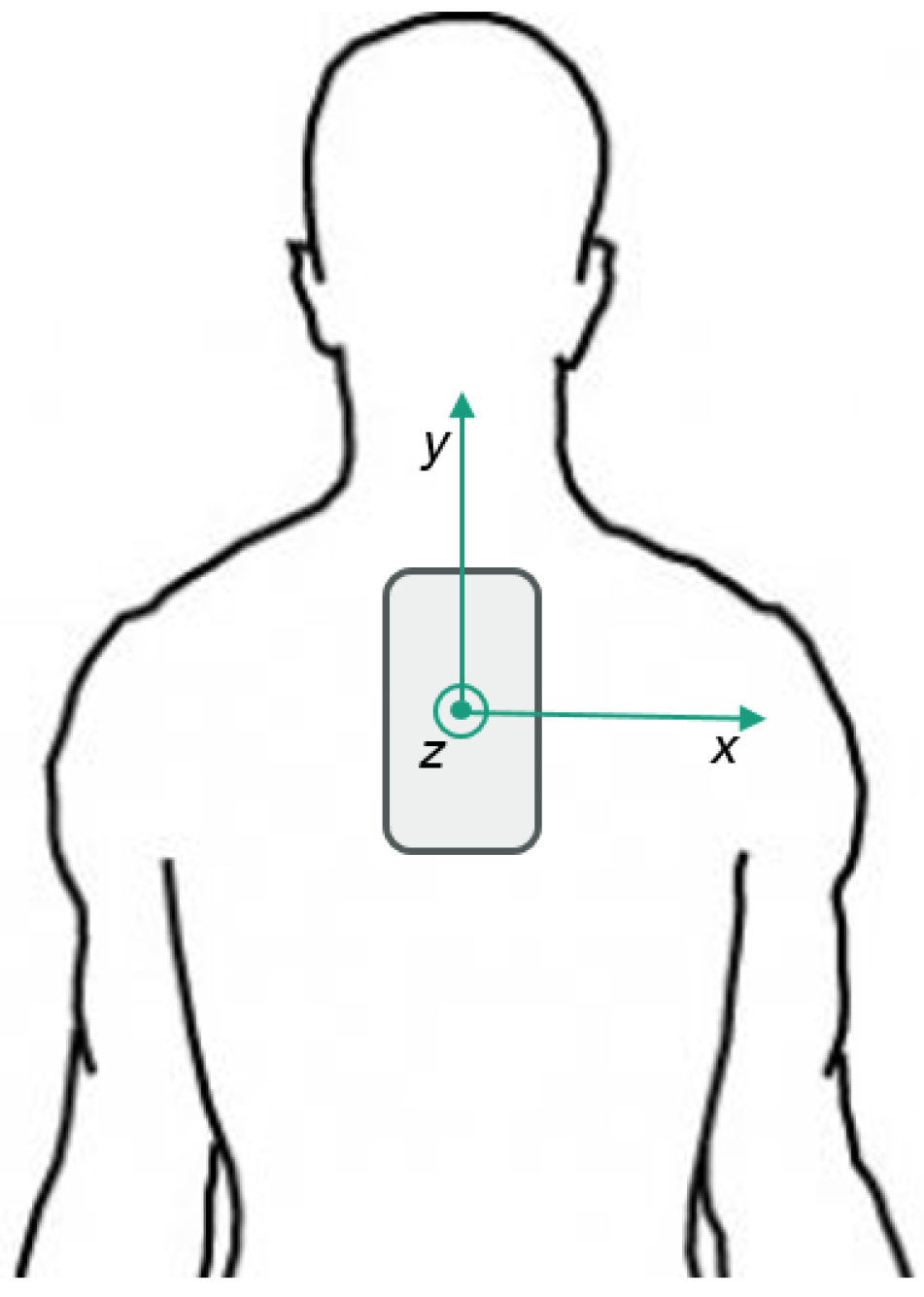
In another study, Hoettinger et al. [
25] proposed a machine learning approach for activity recognition in surf sessions using inertial data from a device placed on the surfer’s chest, inside a waterproof case, under the wetsuit. The goal of this work was to correctly identify specific events of a surf session, namely differentiating between wave and non-wave events, using two different machine learning techniques. The results show that both techniques could be suitable to fulfil this purpose, with only seven waves incorrectly classified from a total of 214 annotated waves [
25].
5. Discussion
Direct comparison of the five-label output event detection algorithm with the preliminary results reported in [
17] demands the recomputation of the confusion matrix presented in
Table 2 to solely feature a total of four labels instead of five, by fusing paddle and lay instances. From this rearrangement, an overall event detection accuracy of 93% was achieved using the
All events dataset described in
Table 1. This value is just slightly inferior to that reported in [
17]—95%, computed from the analysis of only three surf sessions—which proves the coherence and robustness of the algorithm itself. However, in this work, the confusion matrix presented in
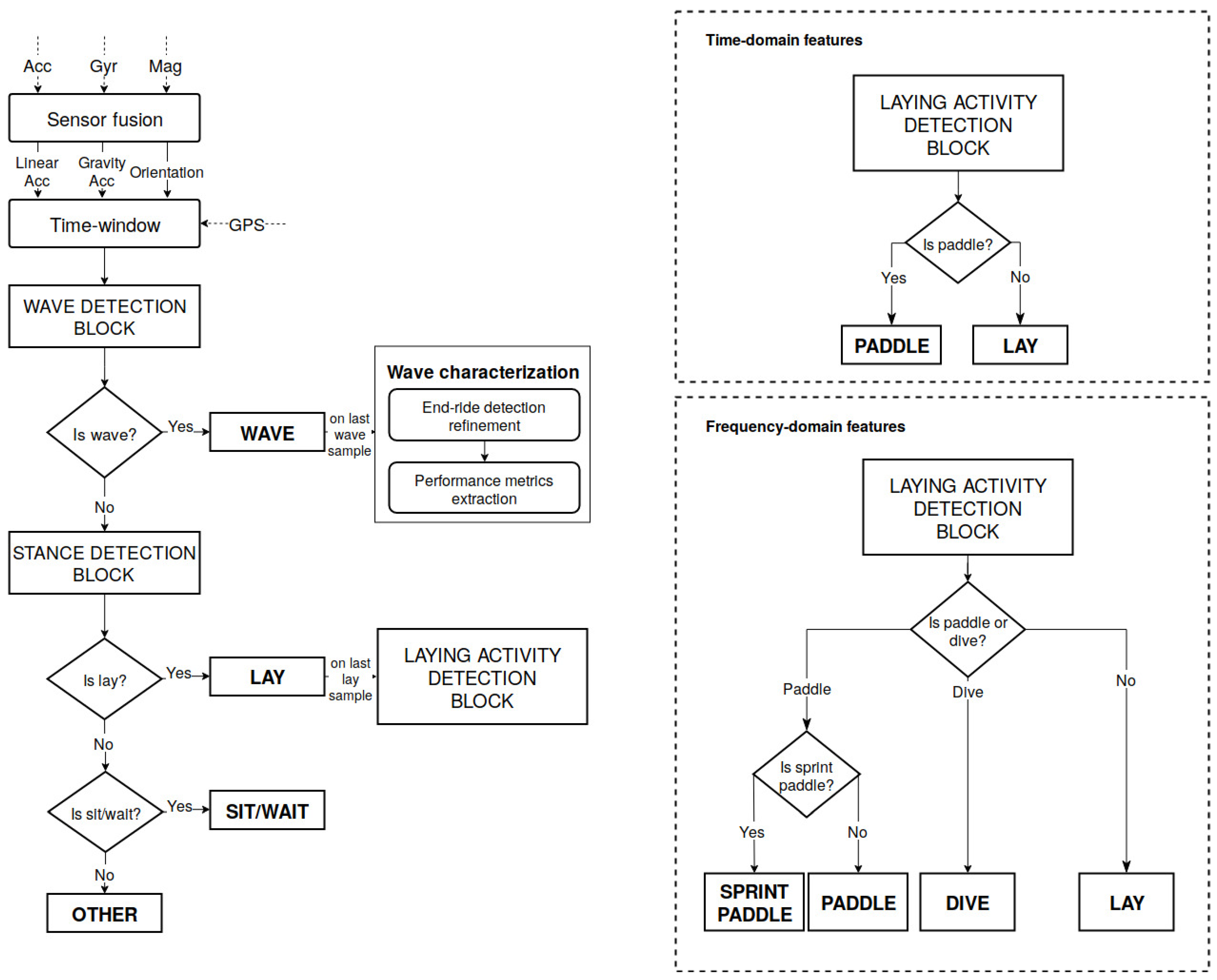
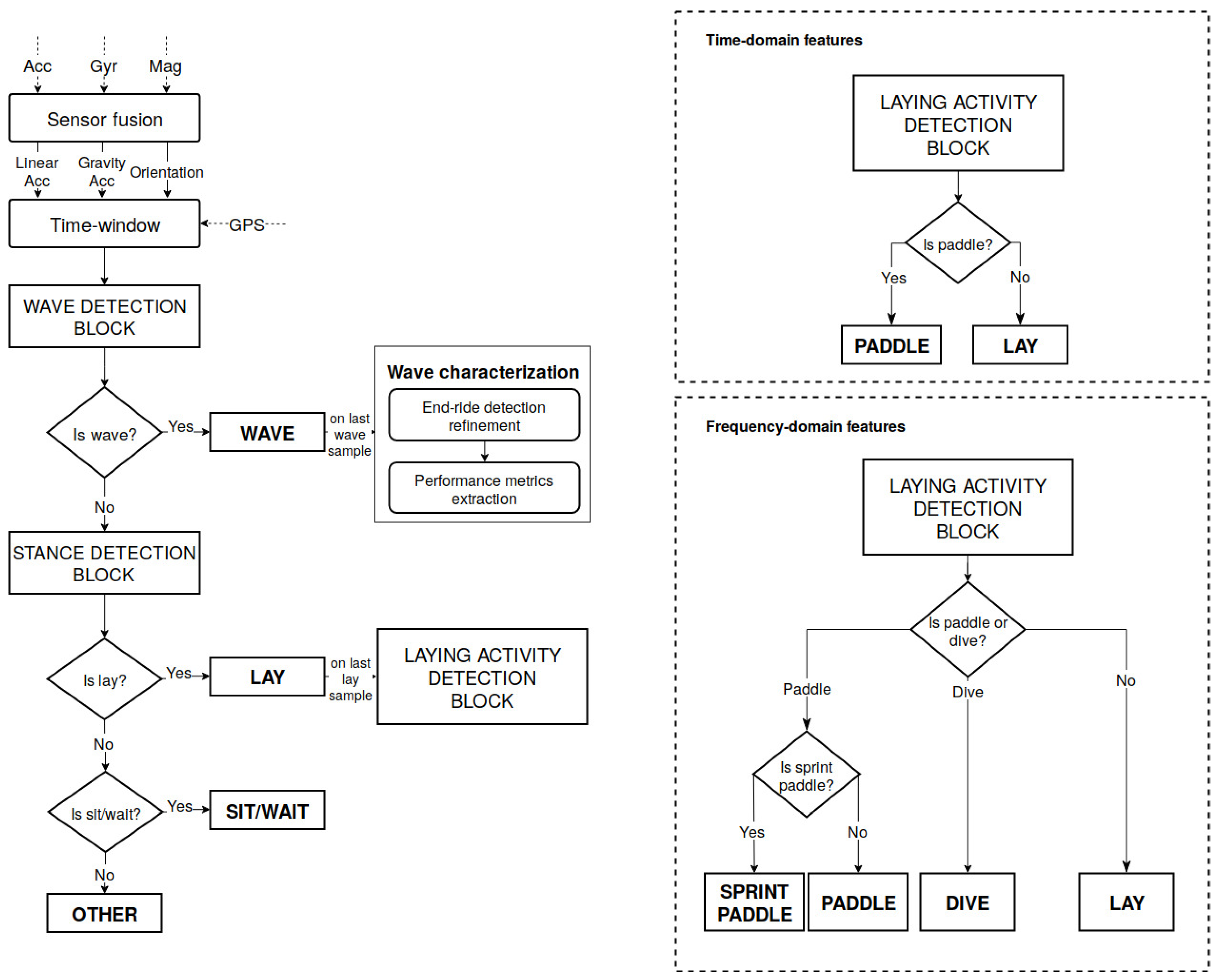
Table 2 discriminates paddle from still lay detections, in accordance with the labels returned by this version of the algorithm (see
Figure 2). When considering this extra activity, the performance in terms of accuracy drops to 87.5%, due to the frequent confusion of still laying with paddle. This problem can relate with the difficulty to annotate lay samples using video ground truth (e.g., situations when the surfer is too far away), but we believe it is mostly inherent to the nature of the algorithm itself: since there are no segmentation operations implemented over the laying periods arriving to the laying activity detection block, each period is simply assigned a single label, even if it featured more than one activity. This means that a sequence such as
paddle–lay–paddle would be simply labelled as paddle, if the periodicity threshold was surpassed, or lay, if it was not. This fact affects lay detection performance in particular, because lay events are scarce (as the low number of annotated lay samples in
Table 2 indicates) and frequently occur between paddling periods, which means that the surfer’s stance does not change, and, thus, the entire period will be assigned a single label—usually paddle because it was the most frequent activity in such periods. This problem revealed the importance of further segmenting laying periods.
Thus, the new version of the laying activities detection block started by implementing a segmentation method, splitting the laying period. Then, frequency-domain features were extracted and used to distinguish four types of laying activities. This flow of operations was expected to neutralise the problem identified and discussed in the previous paragraph, while increasing overall activity classification robustness. An accuracy of 88.1% was finally attained for the detection of all seven events. This means that a slightly superior performance was achieved for the classification of a higher number of activities, leading to a better description of the entire surf session. Laying activities are still the hardest to distinguish, with lay and dive instances frequently confused with paddle by the algorithm. The impact of this situation is, however, diminished if we take into consideration the low number of annotated lay and dive instances, which constitute a total of roughly 23 min (only 5% of all annotated data). The most frequent confusion occurs between sprint paddle and waves, which is expected due to the ambiguity of the annotation process in defining the boundaries of these activities. The algorithm was also optimised not to miss any wave data, as described in [
17], thus the inclusion of the latest moments of sprint paddle in wave periods segmentation was likely by design. Therefore, despite the higher complexity and computational load associated to the extraction of frequency-domain features (compared with the time-domain approach), these were deemed more suitable to describe and model the problem of laying activities’ distinction.
Regarding wave detection performance alone, one can highlight the achievement of 90.3% accuracy of wave detection with second precision, considering the annotated times as ground truth. Then, due to the importance of not missing any waves while still minimising false detections, the whole universe of wave events (327) was taken to compute precision and recall of wave detections, with values of 97.47% and 94.19%, respectively. This outcome was also coherent with the preliminary results reported in [
17] based on a much smaller dataset (in this work, the number of annotated waves increased to more than double), reporting the same precision and just slightly inferior recall.
These results shall stand as evidence of the appropriate performance and robustness of the algorithm. Moreover, it is important to highlight its user-independent nature, the span of conditions under which data collections took place (namely, different sea and weather conditions), and its near real-time event classification, which simultaneously increased the complexity of this work while making its outcome more appealing for usage in a real-world scenario. Besides our previous work [
17], no other studies were found for comparison when it comes to the classification of all events in a surf session.
Challenges and Limitations of the Study
This study presented some challenges and limitations which are worthy of a thorough discussion, mostly concerning the data collection setup and data annotation procedure, both associated to constraints of the surf activity itself. As such, the limitations of this study include the low percentage of annotated data of some activities of interest, allied with an ambiguous annotation process in some cases.
Video annotation was constrained by several difficulties, namely: (1) lack of direct sight of the surfers at all times; (2) impossibility of determining with certainty the identity and/or on-going activity of surfers standing too far away from the shore; and (3) ambiguous determination of ground truth start and end times of some surfing events (e.g., exact moment when the surfer initiates a dive or the moment when regular paddle becomes sprint paddle). Nonetheless, 44% of the data was annotated—approximately 7.5 h—which was considered sufficient to successfully validate activity classification.
The introduction of techniques that consider the sequential dependency between activities in a surf session could be an appropriate next step to improve the performance of event detection. Moreover, the addition of more cameras (another camera at a different location on the beach and/or a drone for top view of the surfers) could assist the problem of data annotation.
In fact, a drone was used in some data collections; however, its utilisation also has some limitations: (1) it is dependent on weather conditions, namely strong wind, making it impossible to use in every scheduled data collection; (2) each flight only lasts 15–20 min due to the battery life of the device, i.e., we cannot record the entire session with a single drone (even if we switch the batteries and send it back, several minutes are lost); (3) several sessions took place with two surfers at once, whom often cannot be spotted at the same time by the drone, i.e., we would not have ground truth data for both surfers under analysis during most of the time of each flight. While it could be interesting to use both beach video camera and drone images for annotation, the amount of data we would be able to annotate based on drone images would be very little compared to the total amount of acquired data that we can annotate with the beach video camera. Furthermore, it would imply the creation of different annotation protocols within the same experiment, with different synchronisation processes, which could be another source of error for little gain. Therefore, we opted for leaving all drone images out of these experiments, and plan to use them later on in further developments of our work, namely to study the surfers’ in-wave movements with great detail.
6. Conclusions
This manuscript conveys an extension of the work in [
17] by bringing forward an extended validation of the event detection algorithm with an enlarged and more mature dataset, and a new method that improved the characterisation of laying events. The algorithm proved to be 88.1% accurate in distinguishing seven surf-specific activities—wave riding, paddling, sprint paddling, diving, laying, and sitting on the board—with second precision. Besides its promising results, our overall solution is also user-independent and has a nearly real-time response, which reiterates its maturity and market value.
As future work, the proposed solution will be integrated and validated in real-time and real-world scenarios to ensure its reproducibility. Moreover, a manoeuvre detection block shall be implemented, aiming to characterise and evaluate in-wave events, and the potential of creating a model to assess the correctness of the movements of each surfer will be explored. Different segmentation techniques shall also be explored to assess their impact in the performance of our system. Finally, we shall explore the use of top view images (collected using a drone) and/or a second camera fixed at the beach to improve the process of data annotation, and perform a more thorough validation, not only of the activity recognition module, but also of further extraction of metrics of surfing performance (e.g., rotation angles).




{kind=link}
{kind=link}
{kind=link}