Investigation of Acoustic Injection on the MPU6050 Accelerometer

 ,
,
Abstract
1. Introduction
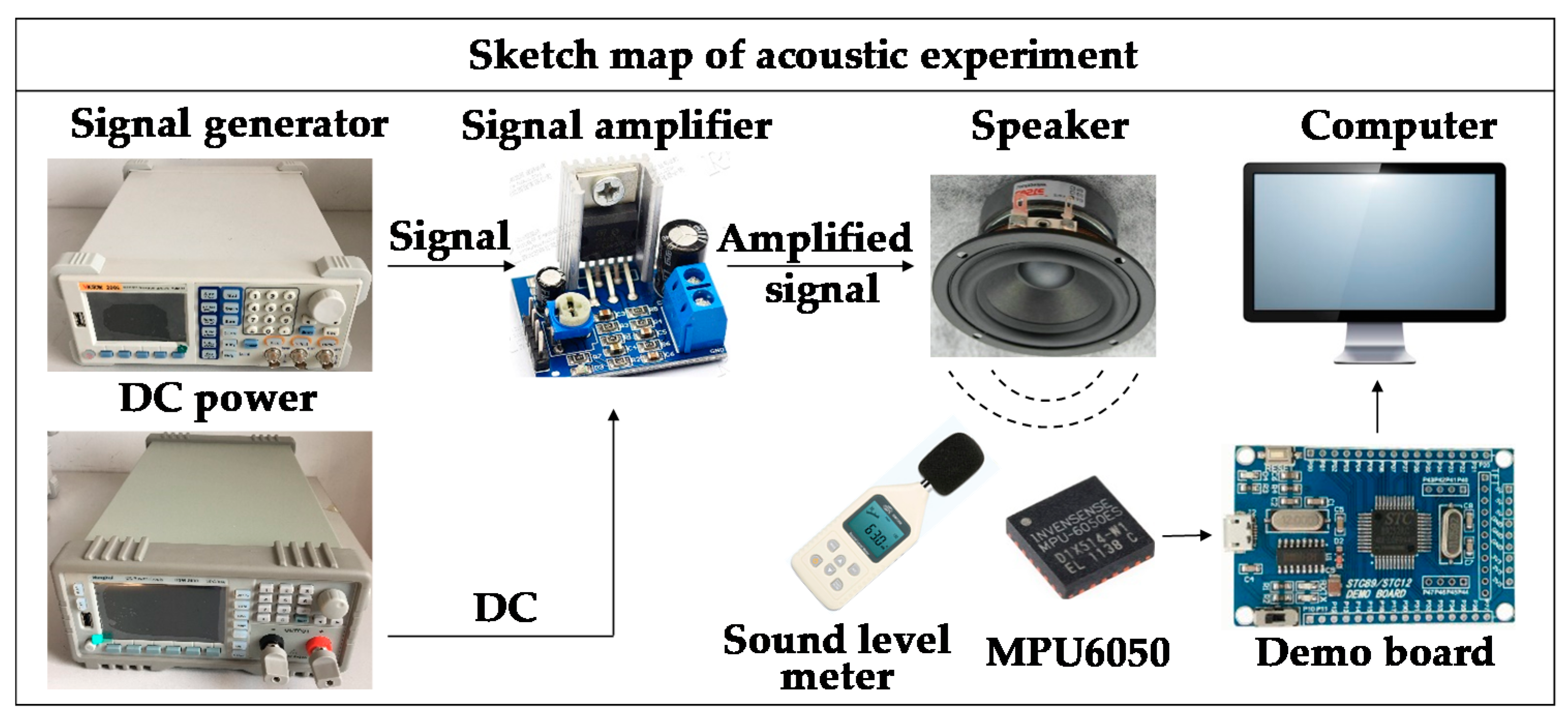
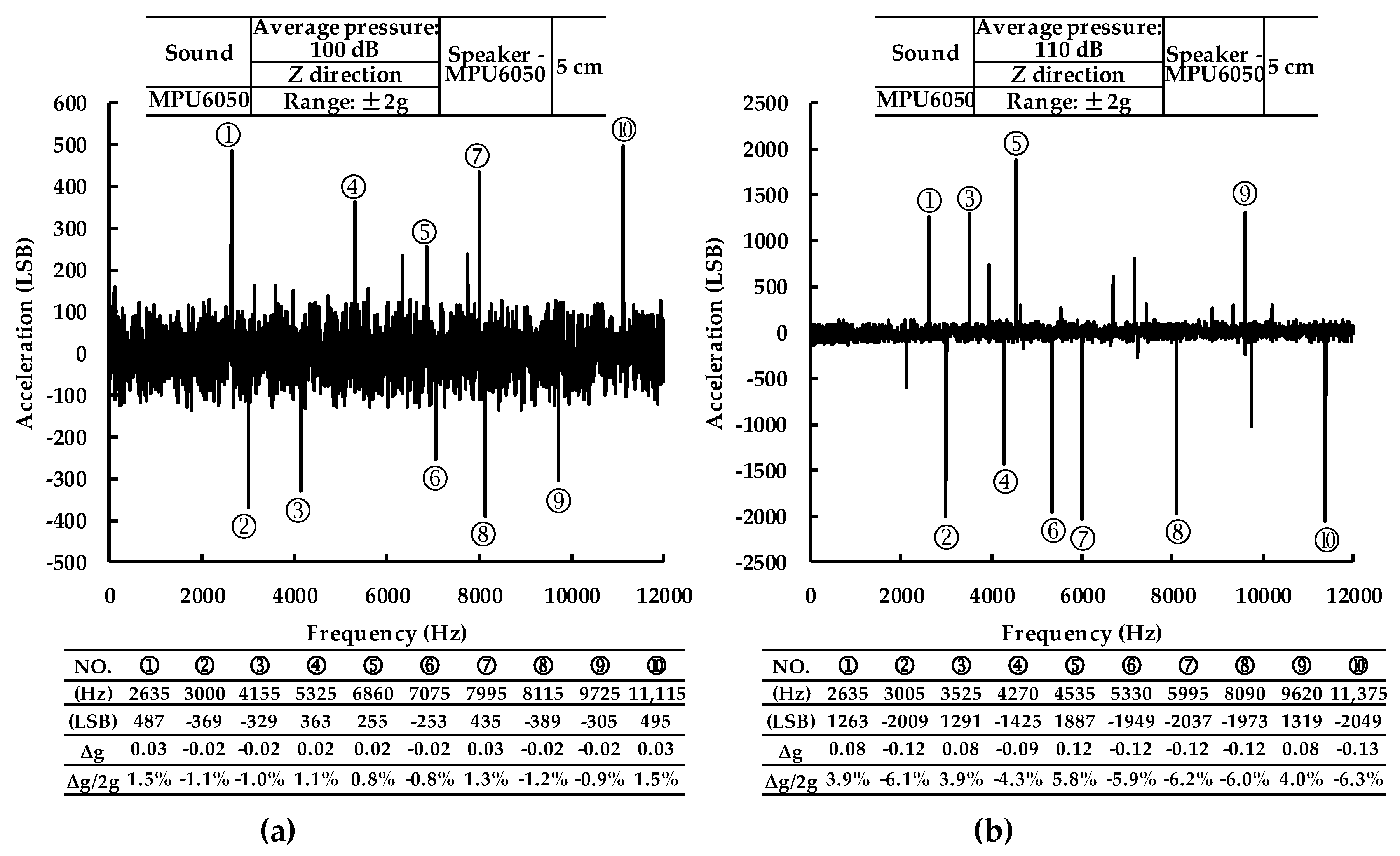
2. Experiment Investigation
3. Modeling and Simulation
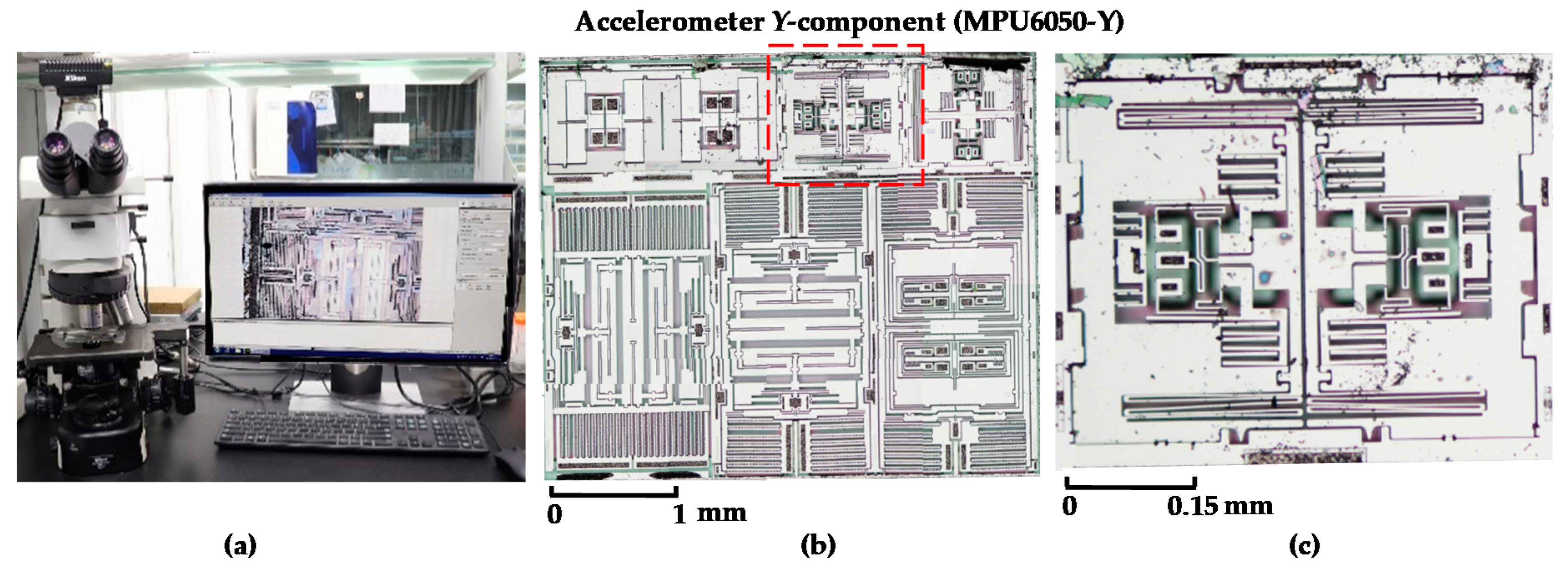
3.1. Disassembly of MPU6050
3.2. Geometric Model
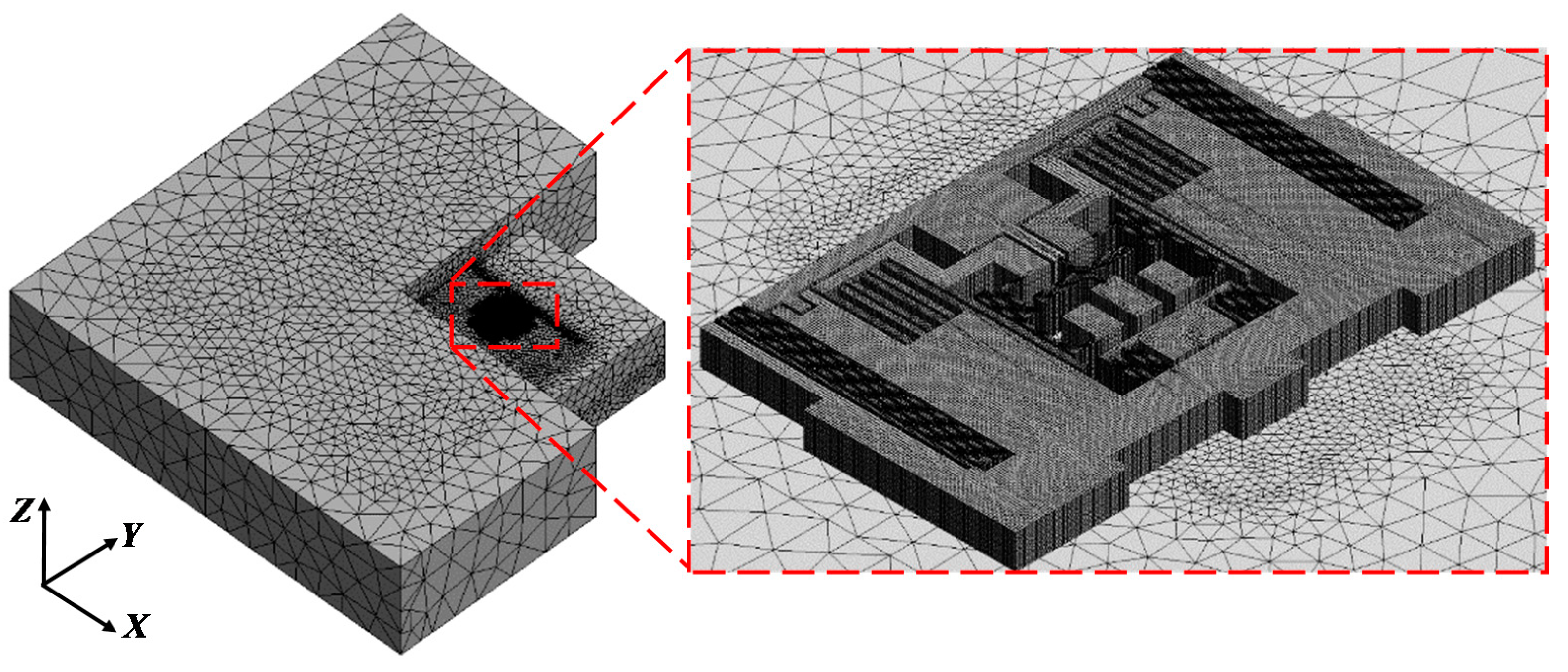
3.3. Finite Element Model
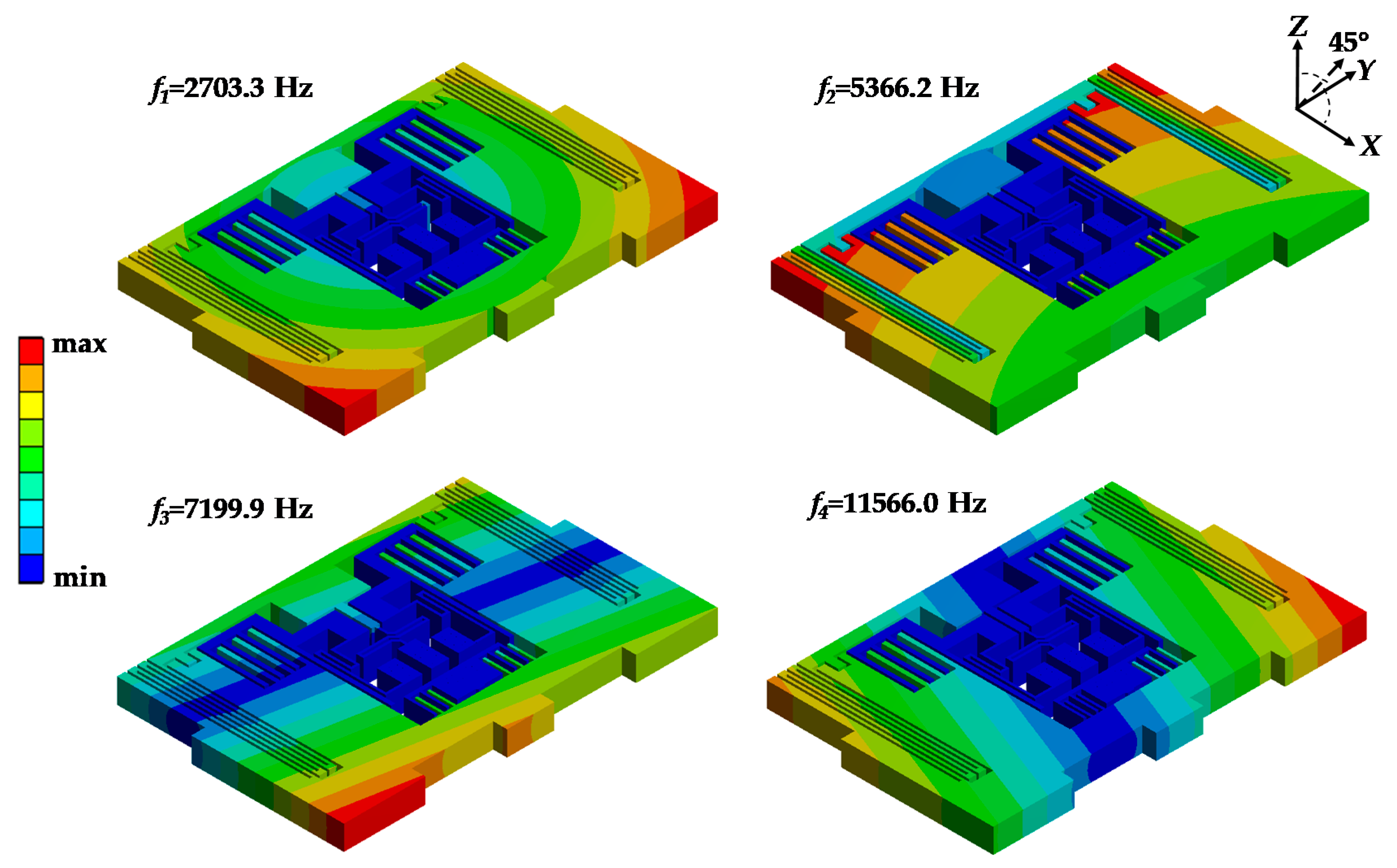
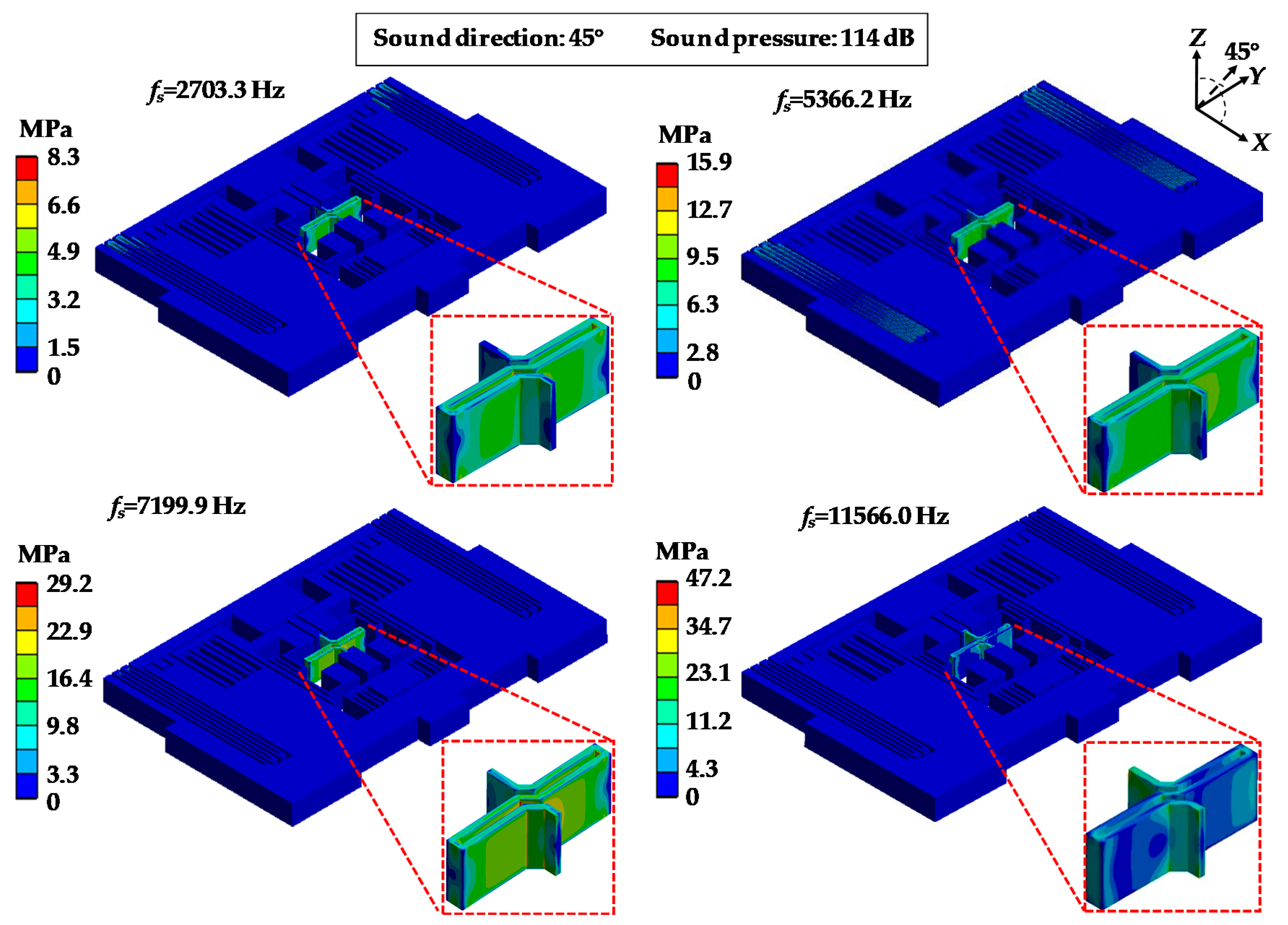
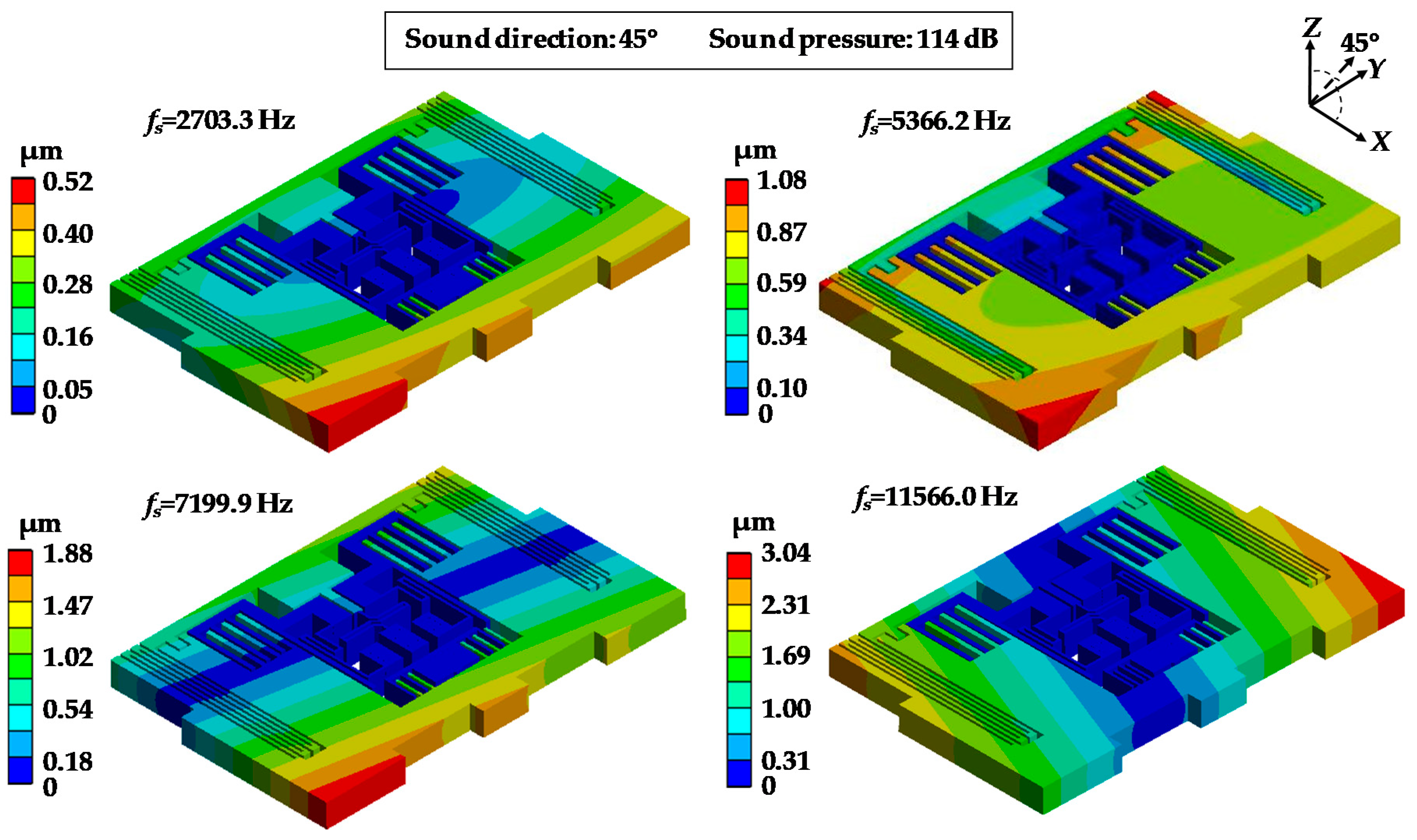
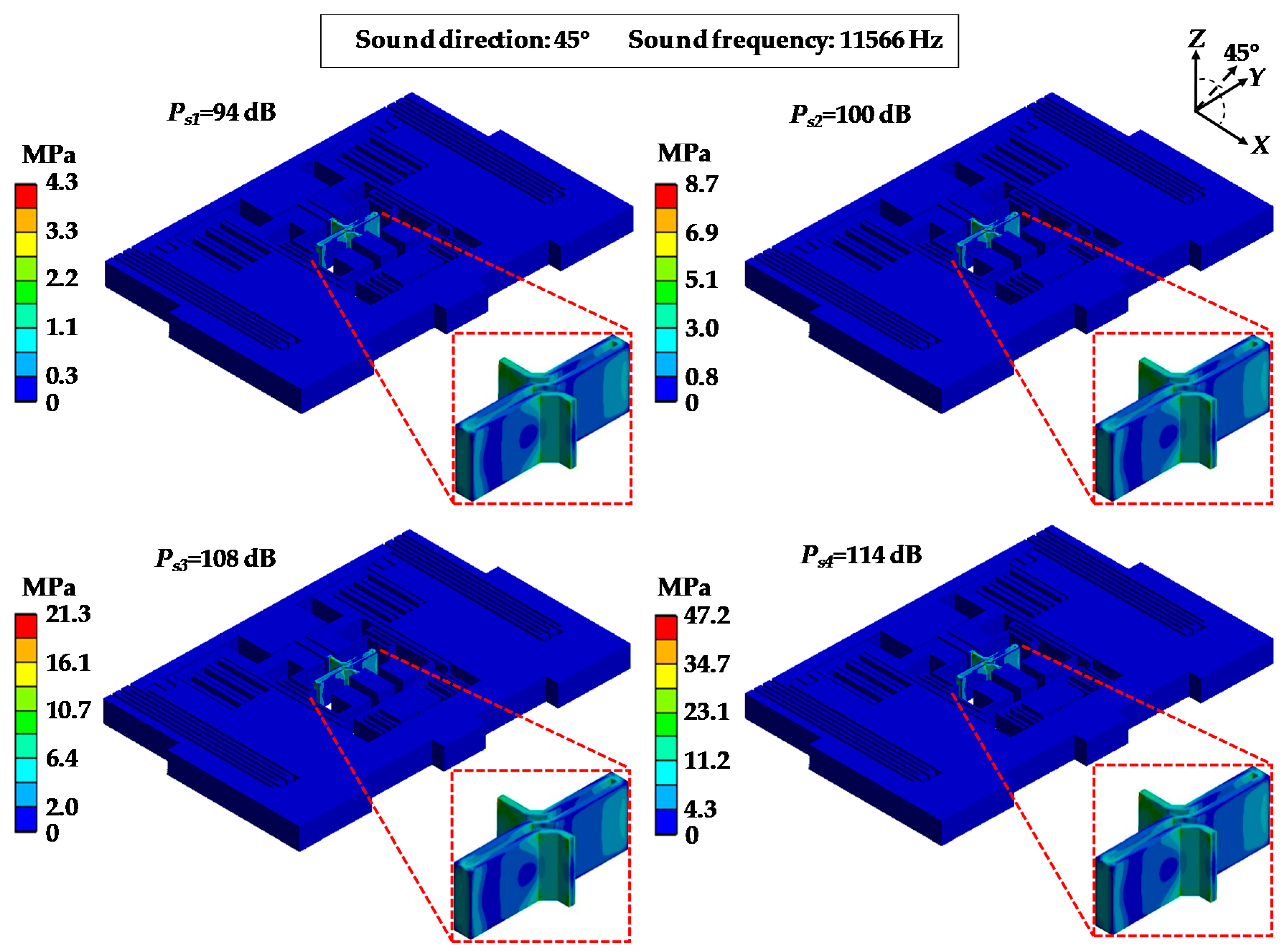
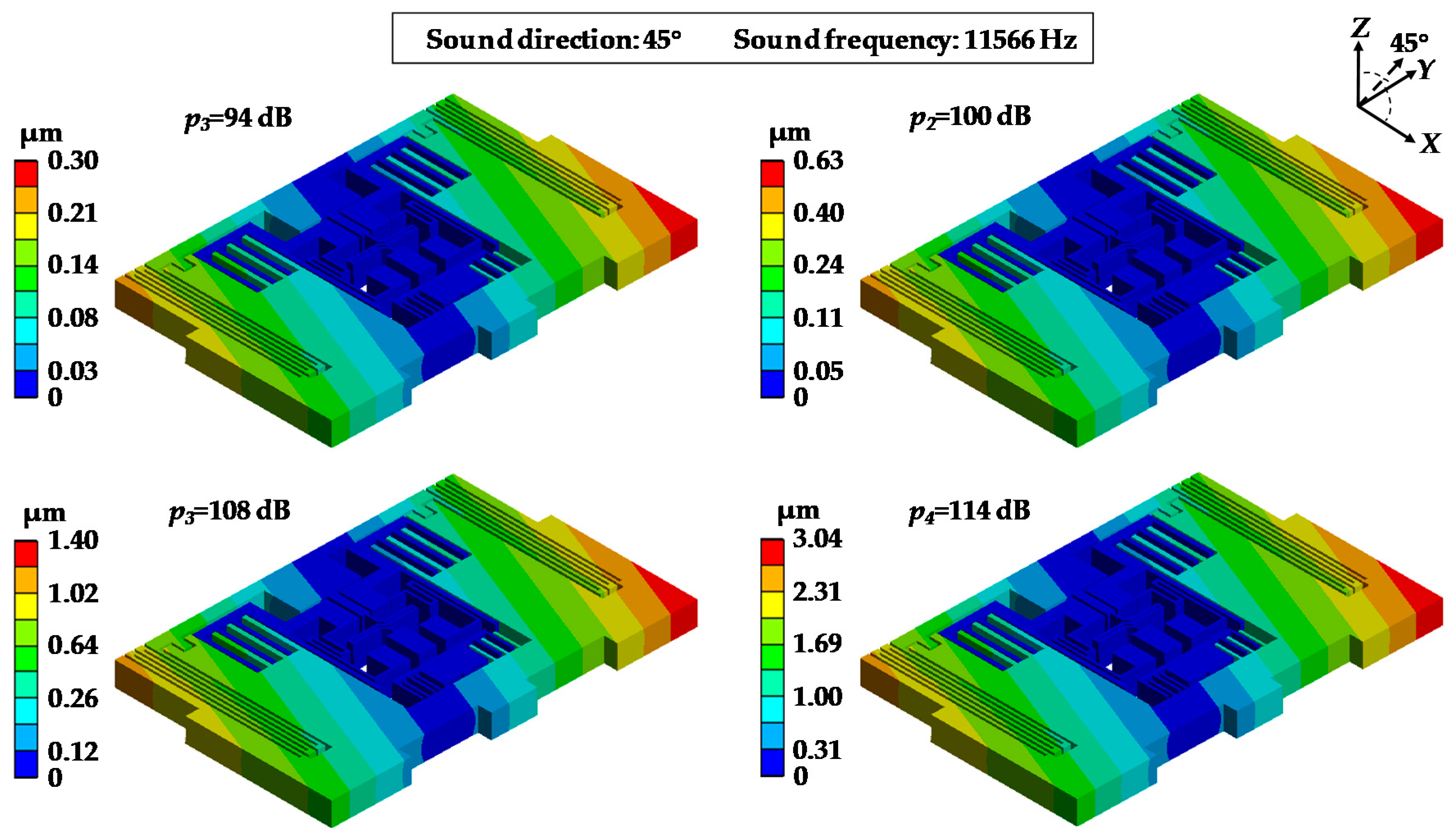
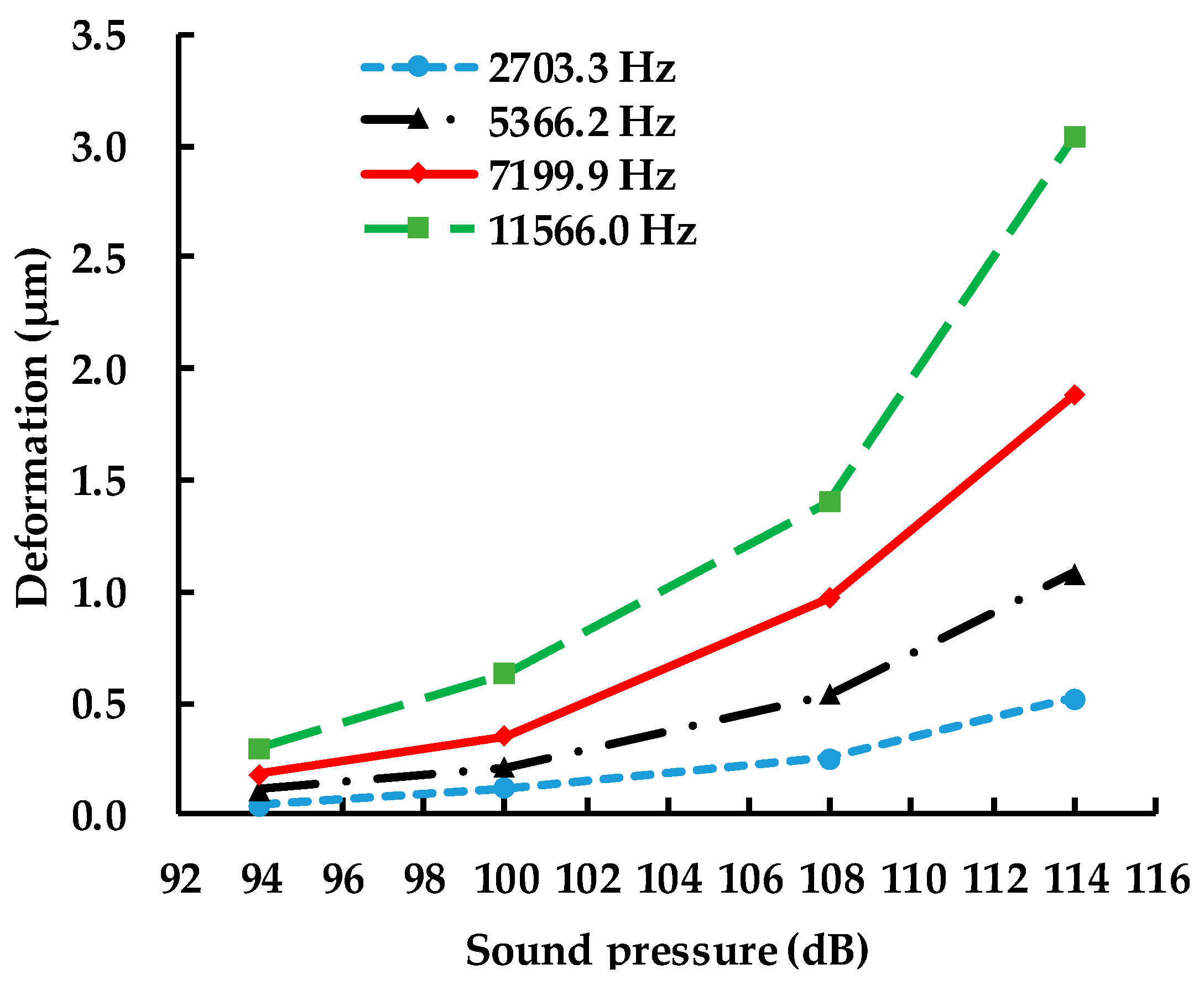
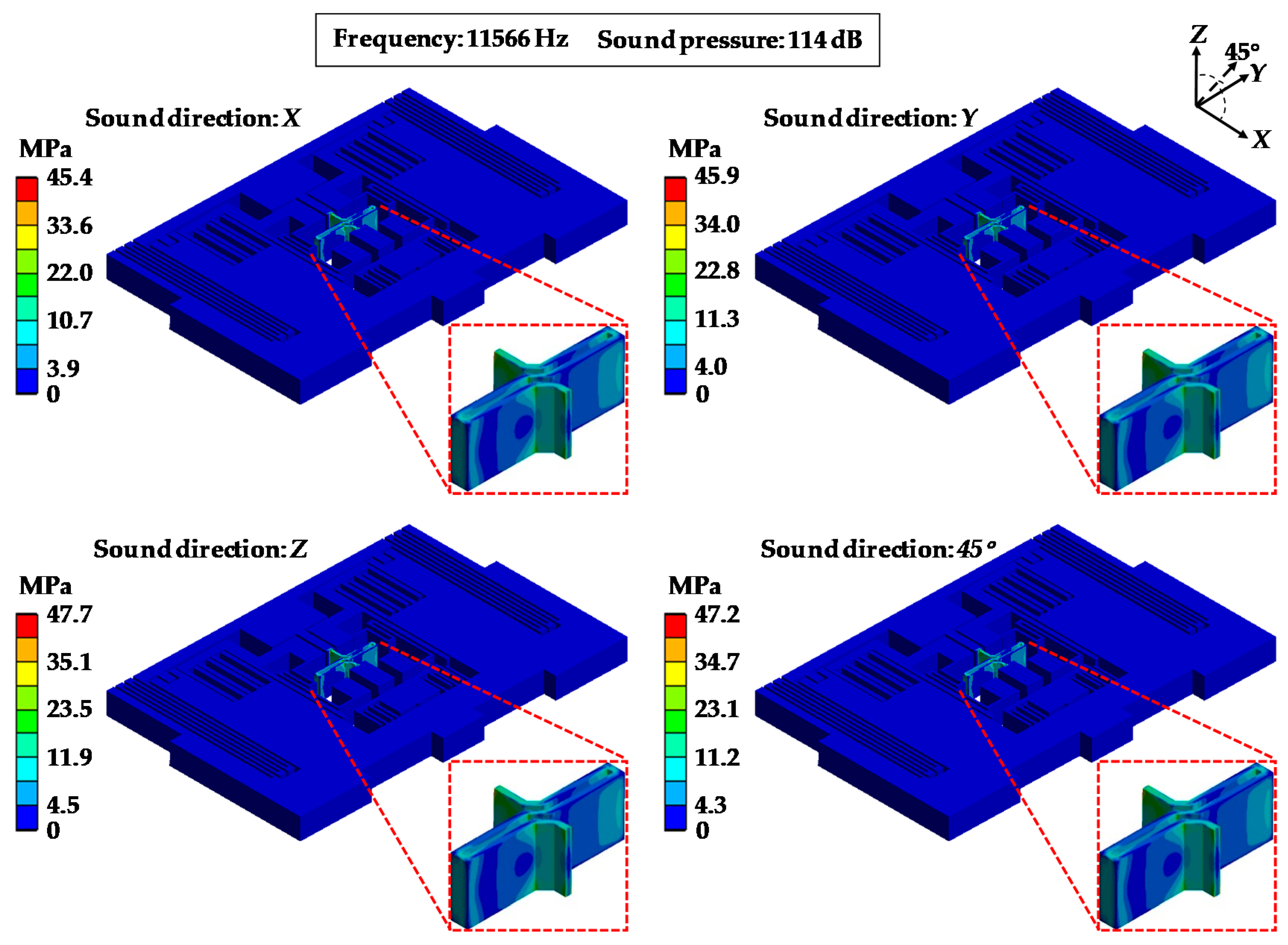
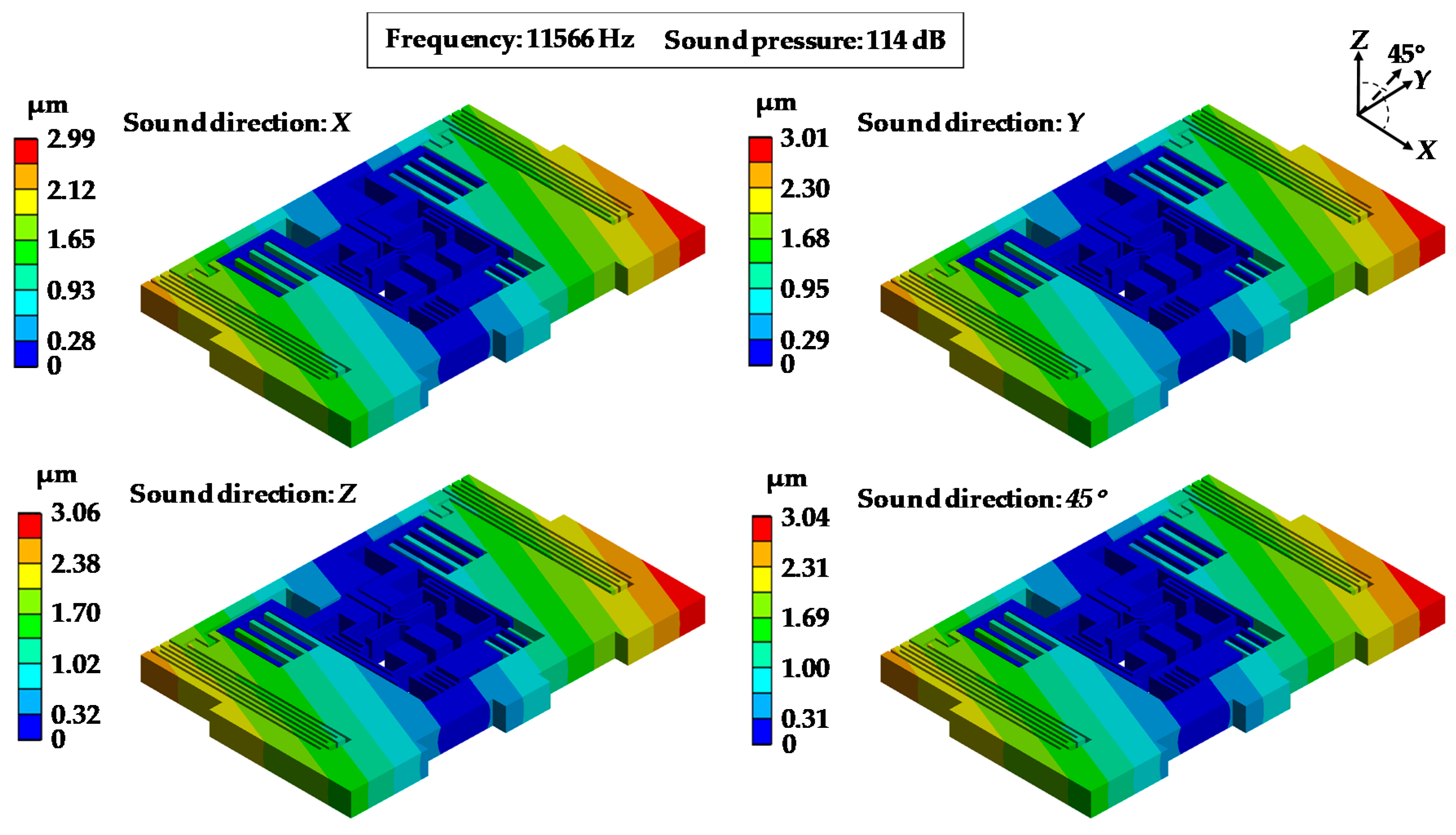
3.4. Simulation Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kim, B.J.; Meng, E. Review of polymer MEMS micromachining. J. Micromech. Microeng. 2016, 26, 013001. [Google Scholar] [CrossRef]
- Kundu, A.; Jang, J.H.; Lee, H.R.; Kim, S.H.; Gil, J.H.; Jung, C.R.; Oh, Y.S. MEMS-based micro-fuel processor for application in a cell phone. J. Power Sources 2006, 162, 572–578. [Google Scholar] [CrossRef]
- Clarke, R. Understanding the drone epidemic. Comput. Law Secur. Rev. 2014, 30, 230–246. [Google Scholar] [CrossRef]
- Xie, R.; Sun, X.; Xia, X.; Cao, J. Similarity matching-based extensible hand gesture recognition. IEEE Sens. J. 2015, 15, 3475–3483. [Google Scholar] [CrossRef]
- Dong, Y.; Zwahlen, P.; Nguyen, A.M.; Frosio, R.; Rudolf, F. Ultra-high precision MEMS accelerometer. In Proceedings of the IEEE 2011 16th International Solid-State Sensors, Actuators and Microsystems Conference, Beijing, China, 5–9 June 2011. [Google Scholar]
- Albarbar, A.; Badri, A.; Sinha, J.K.; Starr, A. Performance evaluation of MEMS accelerometers. Measurement 2009, 42, 790–795. [Google Scholar] [CrossRef]
- Beliveau, A.; Spencer, G.T.; Thomas, K.A. evaluation of MEMS capacitive accelerometers. Des. Test Comput. IEEE 1999, 16, 48–56. [Google Scholar] [CrossRef]
- Sadek, K.; Lueke, J.; Moussa, W. A coupled field multiphysics modeling approach to investigate RF MEMS switch failure modes under various operational conditions. Sensors 2009, 9, 7988–8006. [Google Scholar] [CrossRef] [PubMed]
- Lu, W.; Teng, J.; Li, C.; Cui, Y. Reconstruction to sensor measurements based on a correlation model of monitoring data. Appl. Sci. 2017, 7, 243. [Google Scholar] [CrossRef]
- Georg, J.; Sebastian, Z.; Casimiro, A. Generic sensor failure modeling for cooperative systems. Sensors 2018, 18, 925. [Google Scholar]
- Tao, Y.K.; Liu, Y.F.; Dong, J.X. Flexible stop and double-cascaded stop to improve shock reliability of MEMS accelerometer. Microelectron. Reliab. 2014, 54, 1328–1337. [Google Scholar] [CrossRef]
- Pradeep, L.; Nakul, K.; Jessica, G. Mechanical shock reliability analysis and multiphysics modeling of MEMS accelerometers in harsh environments. In Proceedings of the ASME 2015 International Technical Conference, San Francisco, CA, USA, 2–5 August 2015. [Google Scholar]
- Tu, H.; Lou, W.; Sun, Z.; Qian, Y. Structural reliability simulation for the latching mechanism in MEMS-based Safety and Arming device. Adv. Eng. Softw. 2017, 108, 48–56. [Google Scholar] [CrossRef]
- Khanna, V.K. Adhesion–delamination phenomena at the surfaces and interfaces in microelectronics and MEMS structures and packaged devices. J. Phys. D Appl. Phys. 2011, 44, 034004. [Google Scholar] [CrossRef]
- Lucibello, A.; Capoccia, G.; Proietti, E.; Marcelli, R.; Margesin, B.; Mulloni, V.; Giacomozzi, F.; Vitulli, F.; Scipioni, M.; Bartolucci, G. Reliable response of RF MEMS LTCC packaged switches after mechanical and thermal stress. Microsyst. Technol. 2016, 22, 495–501. [Google Scholar] [CrossRef]
- Yan, M.; Nakibly, G.; Nakibly, G. Gyrophone: Recognizing speech from gyroscope signals. In Proceedings of the Usenix Conference on Security Symposium, San Francisco, CA, USA, 22–25 August 2014. [Google Scholar]
- Son, Y.; Shin, H.; Kim, D.; Park, Y.; Noh, J.; Choi, K.; Choi, J.; Kim, Y. Rocking drones with intentional acoustic noise on gyroscopic sensors. In Proceedings of the USENIX Security Symposium, Washington, DC, USA, 12–14 August 2015. [Google Scholar]
- Soobramaney, P.; Flowers, G.; Dean, R. Mitigation of the effects of high levels of high-frequency noise on MEMS gyroscopes using microfibrous cloth. In Proceedings of the ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 2–5 August 2015. [Google Scholar]
- TDK InvenSense. Available online: www.invensense.com/products/motion-tracking/6-axis/mpu6050 (accessed on 14 February 2019).
- Oral, I.; Guzel, H.; Ahmetli, G. Determining the mechanical properties of epoxy resin (DGEBA) composites by ultrasonic velocity measurement. J. Appl. Polym. Sci. 2012, 127, 1667–1675. [Google Scholar] [CrossRef]
- Sohail, I.; Afzaal, A.M.; Rana, I.S. Design and analysis of novel micro displacement amplification mechanism actuated by chevron shaped thermal actuators. Microsyst. Technol. 2019, 25, 861–875. [Google Scholar]
- Columbia Metals. Available online: www.columbiametals.com/products/controlled-expansion-alloys/alloy-42 (accessed on 9 March 2019).
- Saitoh, T.; Matsuyama, H.; Toya, M. Numerical stress analysis of resin cracking in LSI plastic packages under temperature cyclic loading. IEEE Trans. Compon. Packag. Manuf. Technol. Part B 2002, 21, 407–412. [Google Scholar] [CrossRef]
- Engineers Edge. Available online: https://www.engineersedge.com/calculators/air-density.htm (accessed on 18 March 2019).
- Yang, W.D.; Li, Y. Sound absorption performance of natural fibers and their composites. Sci. China Technol. Sci. 2012, 55, 2278–2283. [Google Scholar] [CrossRef]
- Kinsler, L.; Frey, A.; Coppens, A. Fundamentals of Acoustics; John Wiley & Sons, Inc.: New York, NY, USA, 1999; ISBN 0-471-84789-5. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Material | Property (Unit) | Value | Reference |
|---|---|---|---|---|
| Package | Epoxy resin | Density: ρ1 (kg/m3) | 980 | [20] |
| Young’s modulus: E1 (GPa) | 2.89 | [20] | ||
| Poisson ratio: v1 | 0.40 | [20] | ||
| MEMS cap ASIC Accelerometer | Silicon | Density: ρ2 (kg/m3) | 2330 | [21] |
| Young’s modulus: E2 (GPa) | 150 | [21] | ||
| Poisson ratio: v2 | 0.22 | [21] | ||
| Lead frame | Alloy 42 | Density: ρ3 (kg/m3) | 8150 | [22] |
| Young’s modulus: E3 (GPa) | 145 | [23] | ||
| Poisson ratio: v3 | 0.30 | [23] |
| Property (Unit) | Value | Reference |
|---|---|---|
| Air density: ρa (kg/m3) | 1.225 | [24] |
| Pressure of acoustic wave: ps (Pa) | 1/2/5/10 | |
| Frequency of acoustic wave: fs (Hz) | 2703.3/5366.2/ 7199.9/11,566 | |
| Distance between acoustic source and MPU6050: L (cm) | 5 | |
| Direction of acoustic wave | x/y/z/45° | |
| Gravity: G (m/s2) | 9.8 | |
| Acoustic absorption coefficient of epoxy resin: αer | 0.15 | [25] |
| Acoustic impedance of air: Za (Pa·s/m) | 409.4 | [26] |
| Acoustic impedance of epoxy resin: Zer (Pa·s/m) | 931,000 | [26] |
| Simulation | Mode 1 | Mode 2 | Mode 3 | Mode 4 | ||||
| 2703.3 Hz | 5366.2 Hz | 7199.9 Hz | 11,566.0 Hz | |||||
| 100 dB experiment | NO. 1 | Δ | NO. 4 | Δ | NO. 6 | Δ | NO. 10 | Δ |
| 2635 Hz | −2.5% | 5325 Hz | −0.8% | 7075 Hz | −1.7% | 11,115 Hz | −3.9% | |
| 110 dB experiment | NO. 1 | Δ | NO. 6 | Δ | NO. 8 | Δ | NO. 10 | Δ |
| 2635 Hz | −2.5% | 5330 Hz | −0.7% | 8090 Hz | 12.4% | 11,375 Hz | 1.7% | |
| Amplitude (dB) | Frequency (Hz) | Maximum Deformation (μm) | |||
|---|---|---|---|---|---|
| X | Y | Z | 45° | ||
| 114 | 2703.3 | 0.51 | 0.52 | 0.54 | 0.52 |
| 5366.2 | 1.06 | 1.09 | 1.10 | 1.08 | |
| 7199.9 | 1.85 | 1.87 | 1.90 | 1.88 | |
| 11,566.0 | 2.99 | 3.01 | 3.06 | 3.04 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, H.; Shen, S.; Zhang, G.; Yang, Y.; Liu, Z.; Xie, Q.; Gao, C.; Zhang, P.; Zhao, W. Investigation of Acoustic Injection on the MPU6050 Accelerometer. Sensors 2019, 19, 3083. https://doi.org/10.3390/s19143083
Zhang Y, Li H, Shen S, Zhang G, Yang Y, Liu Z, Xie Q, Gao C, Zhang P, Zhao W. Investigation of Acoustic Injection on the MPU6050 Accelerometer. Sensors. 2019; 19(14):3083. https://doi.org/10.3390/s19143083
Chicago/Turabian StyleZhang, Yunfan, Hui Li, Shengnan Shen, Guohao Zhang, Yun Yang, Zefeng Liu, Qisen Xie, Chaofu Gao, Pengfei Zhang, and Wu Zhao. 2019. "Investigation of Acoustic Injection on the MPU6050 Accelerometer" Sensors 19, no. 14: 3083. https://doi.org/10.3390/s19143083
APA StyleZhang, Y., Li, H., Shen, S., Zhang, G., Yang, Y., Liu, Z., Xie, Q., Gao, C., Zhang, P., & Zhao, W. (2019). Investigation of Acoustic Injection on the MPU6050 Accelerometer. Sensors, 19(14), 3083. https://doi.org/10.3390/s19143083