Investigation of Parameter Effects on Virtual-Spring-Force Algorithm for Wireless-Sensor-Network Applications

 ,
,
Abstract
:1. Introduction
2. Theory of Virtual-Spring-Force Algorithms
2.1. Original Virtual-Spring-Force Algorithm
| Algorithm 1: Distributed Algorithm for Leapfrog in Virtual Spring Force (VFA-SF) in Wireless Sensor Networks. |
 |
2.2. Optimized VFA-SF Strategy
3. Performance Evaluation of the VFA-SF
4. Parameter Effects on VFA-SF and VFA-SF-OPT
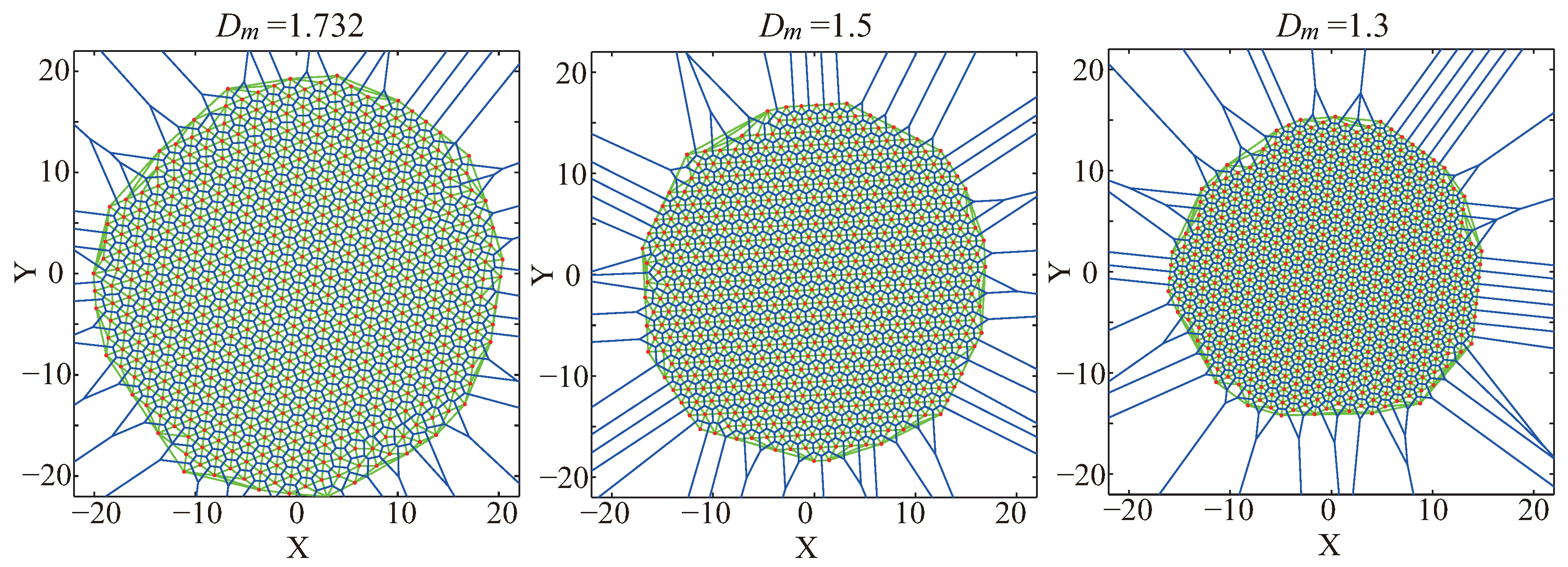
4.1. Effect of Node Equilibrium Distance
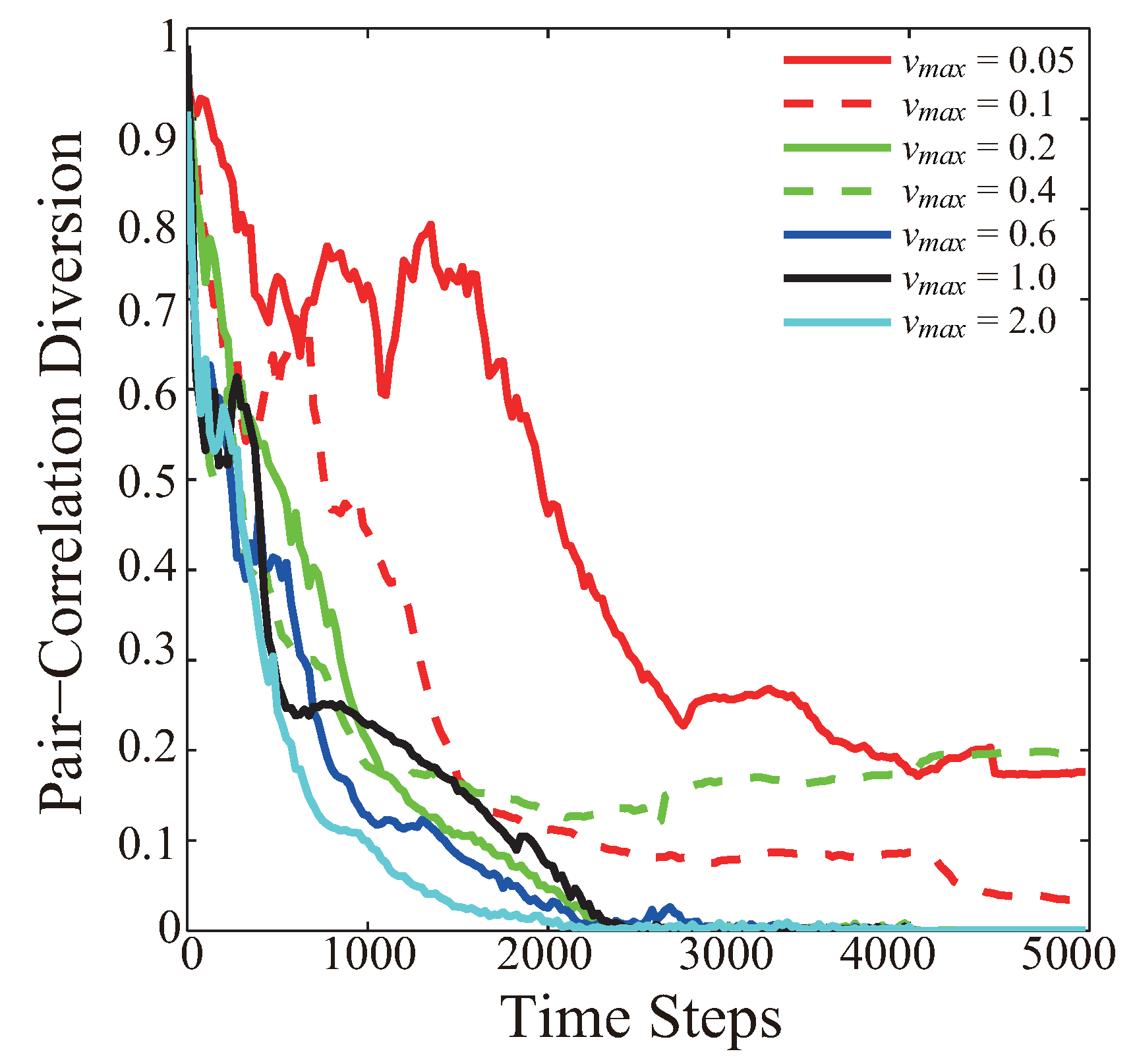
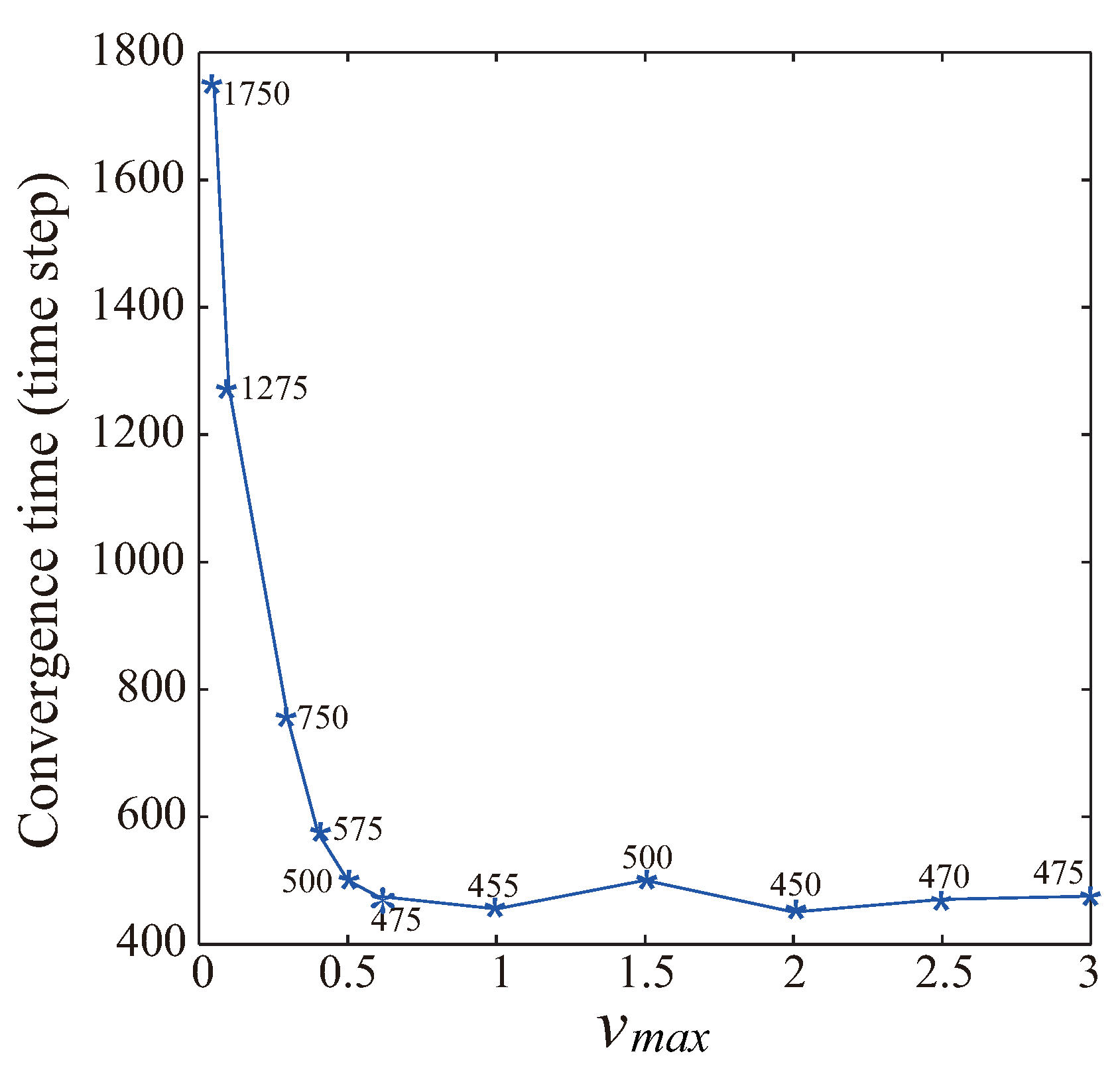
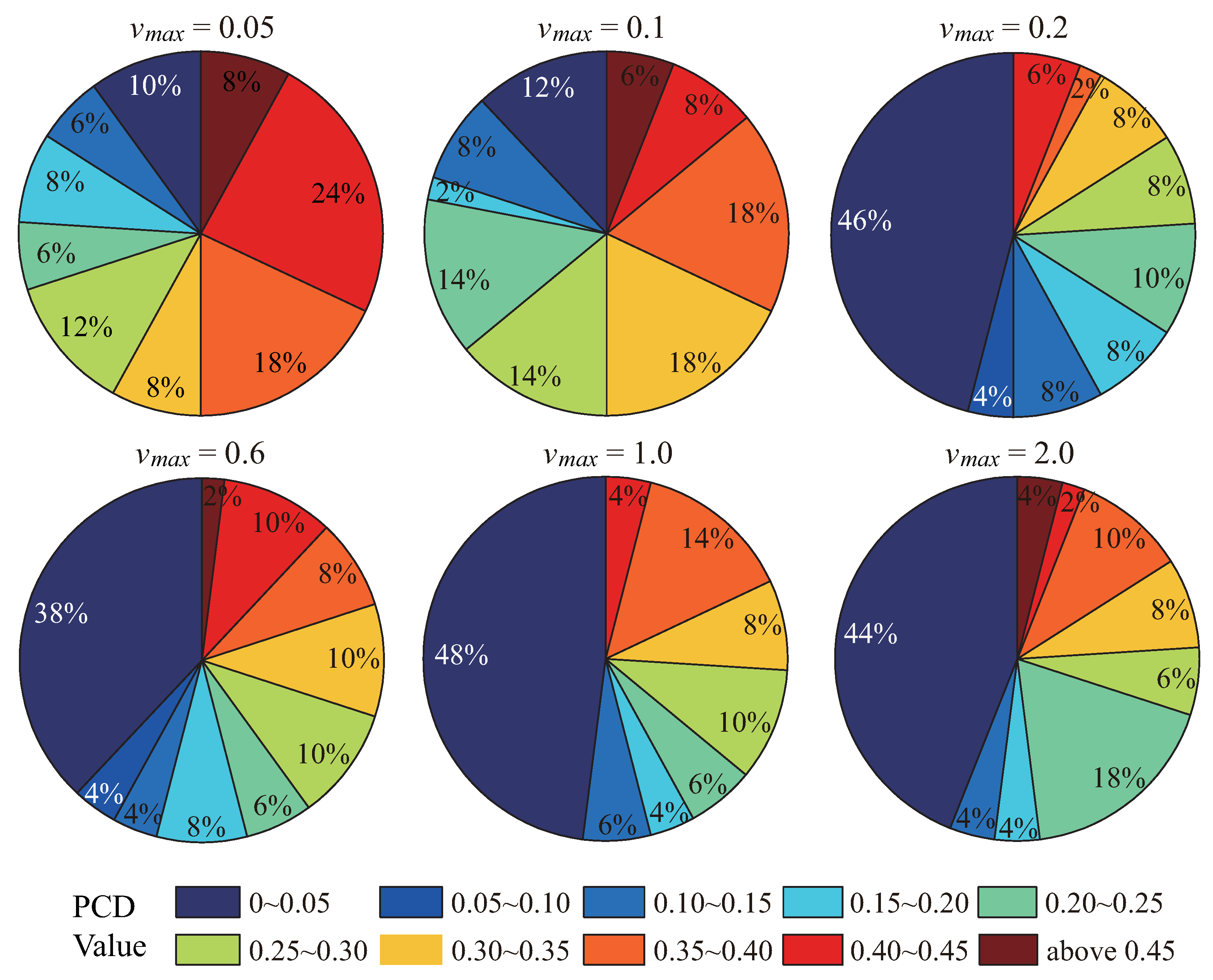
4.2. Effect of Node Velocity
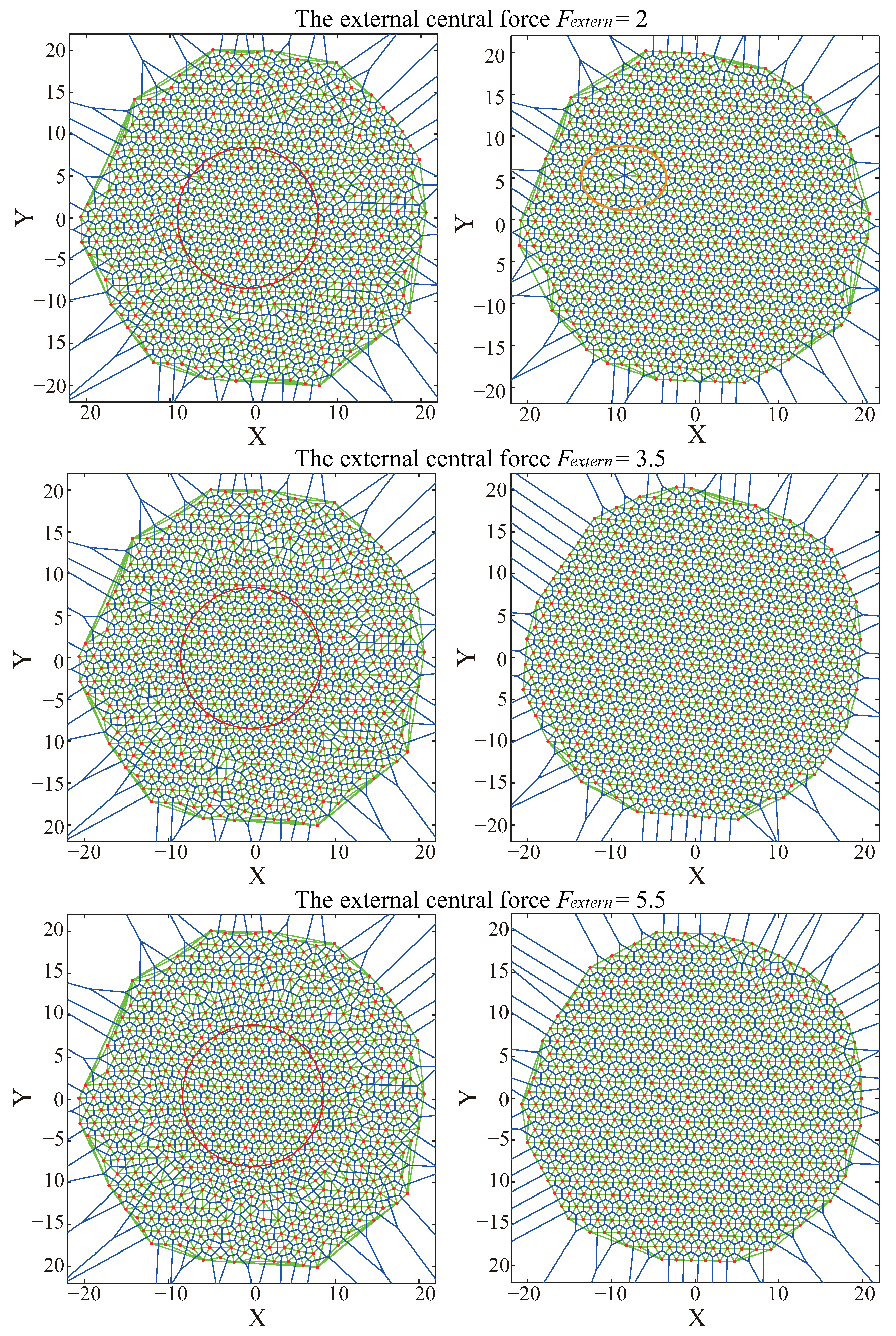
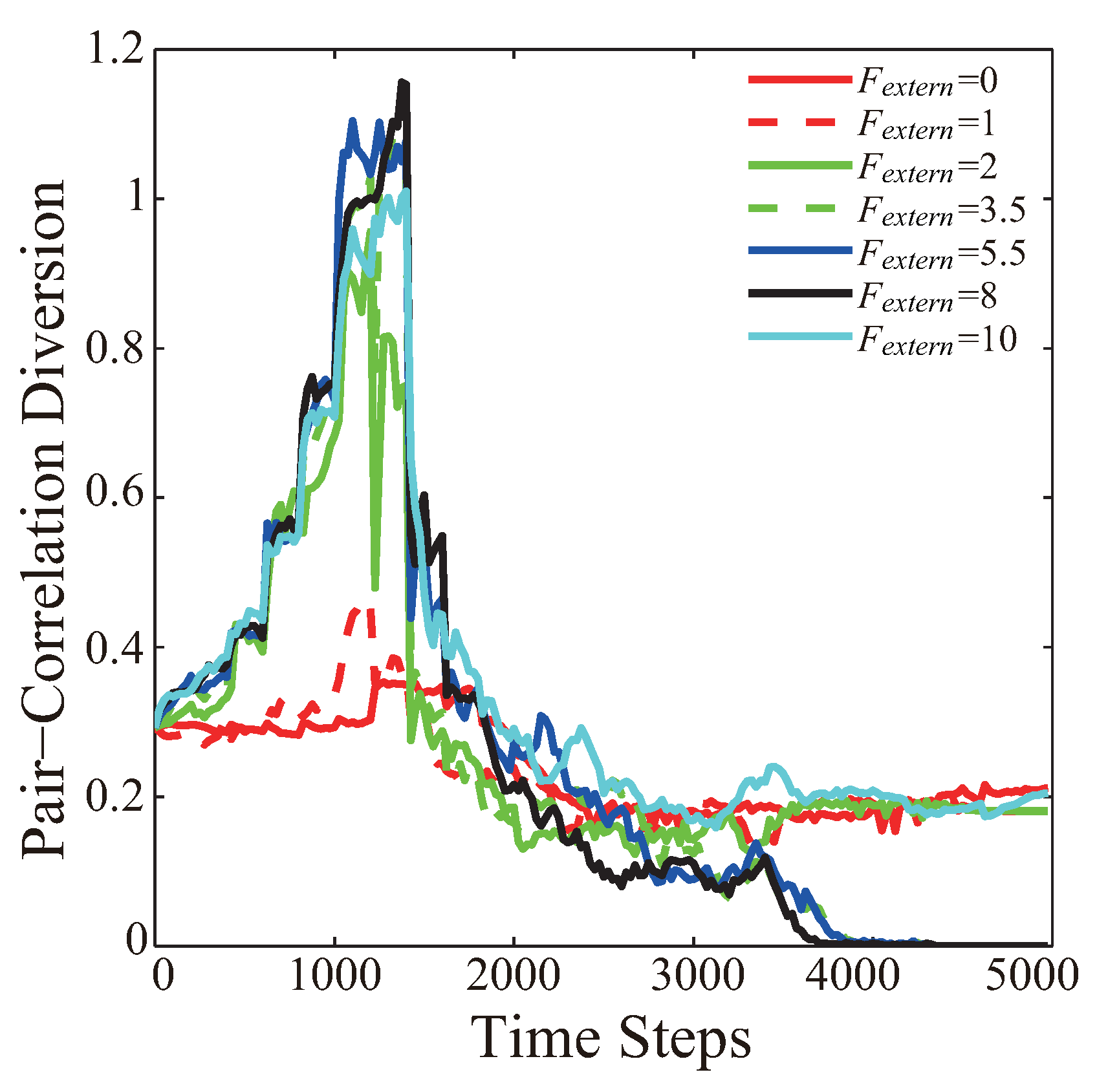
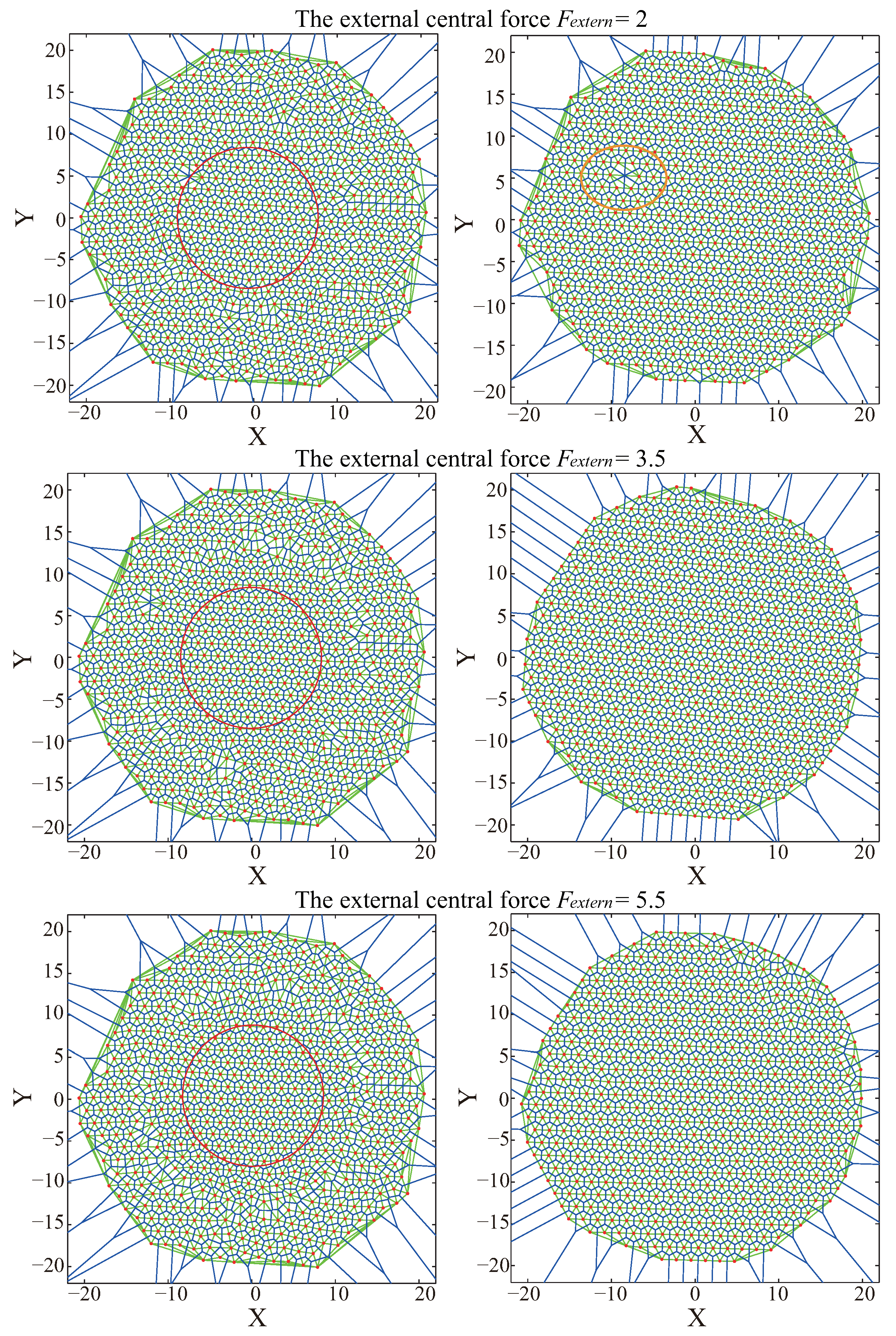
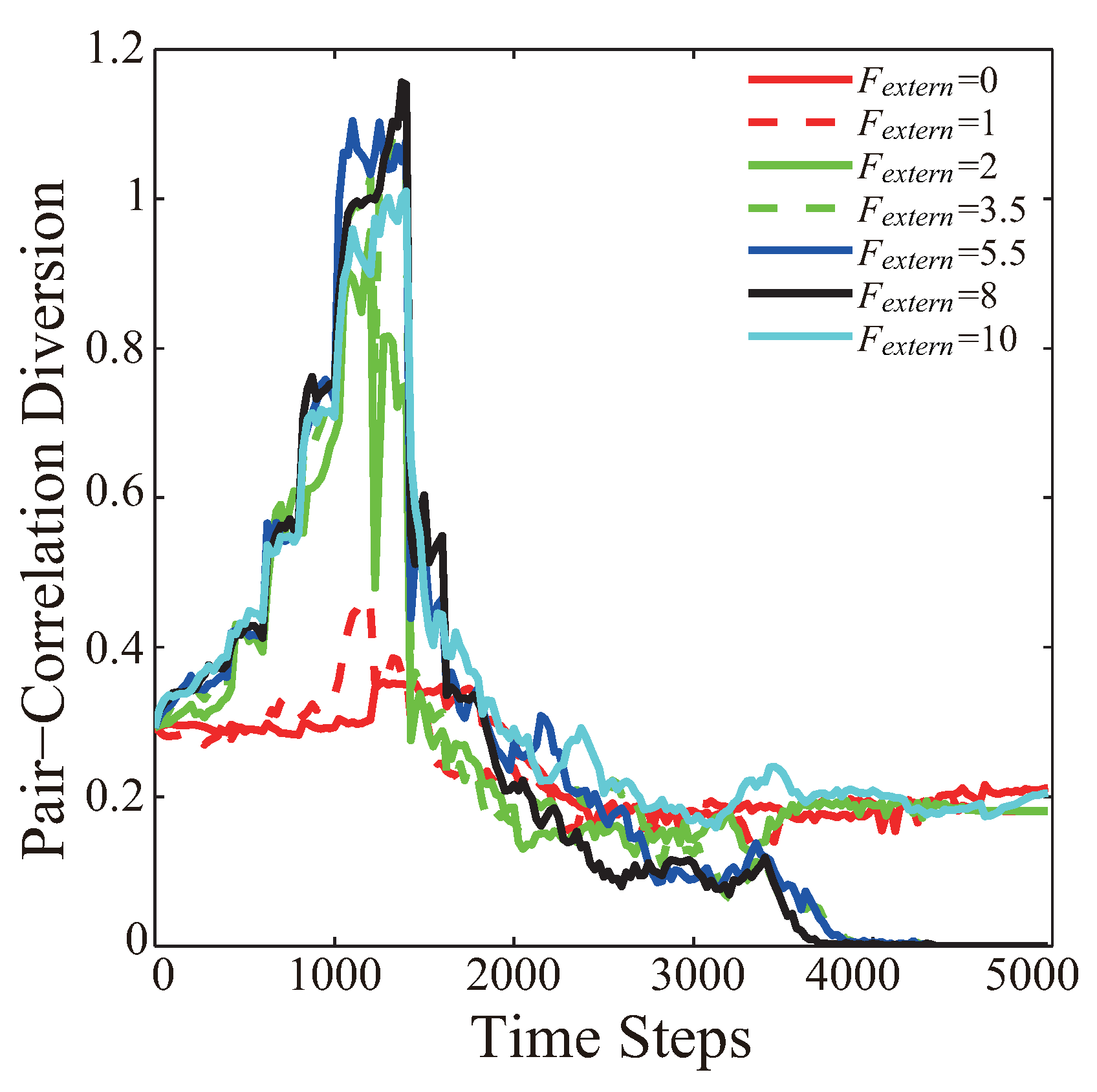
4.3. Effect of External Central Force
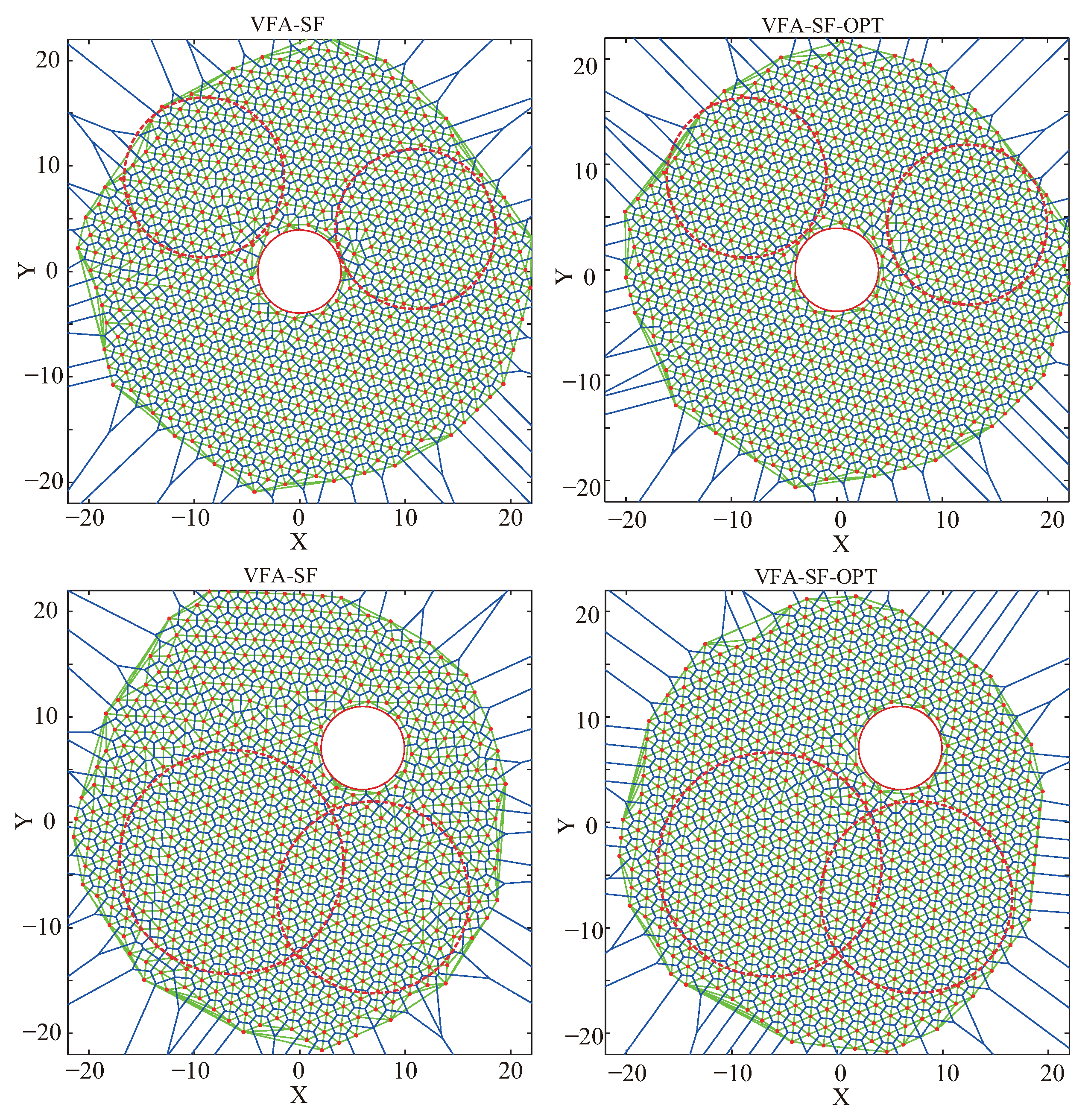
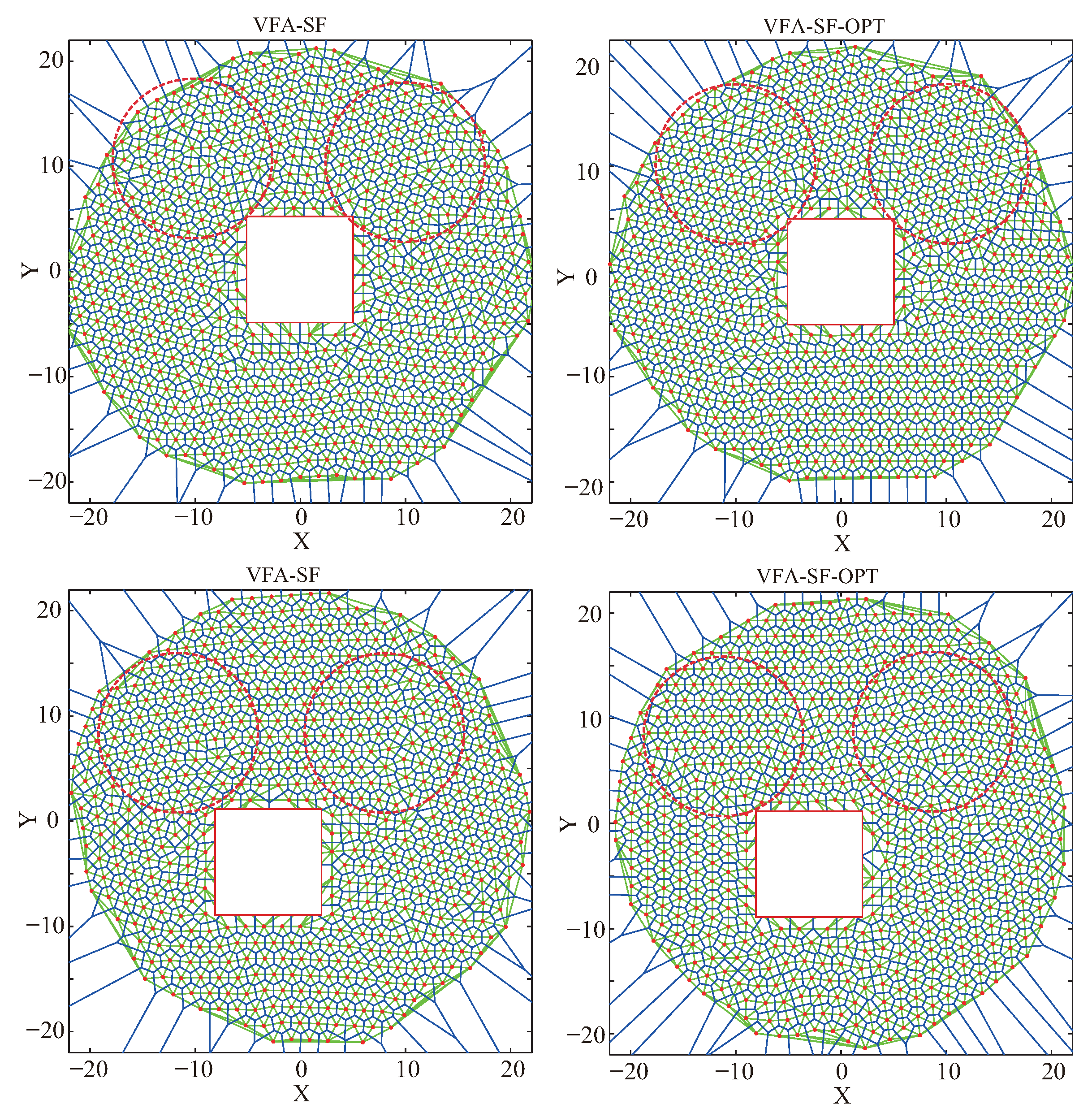
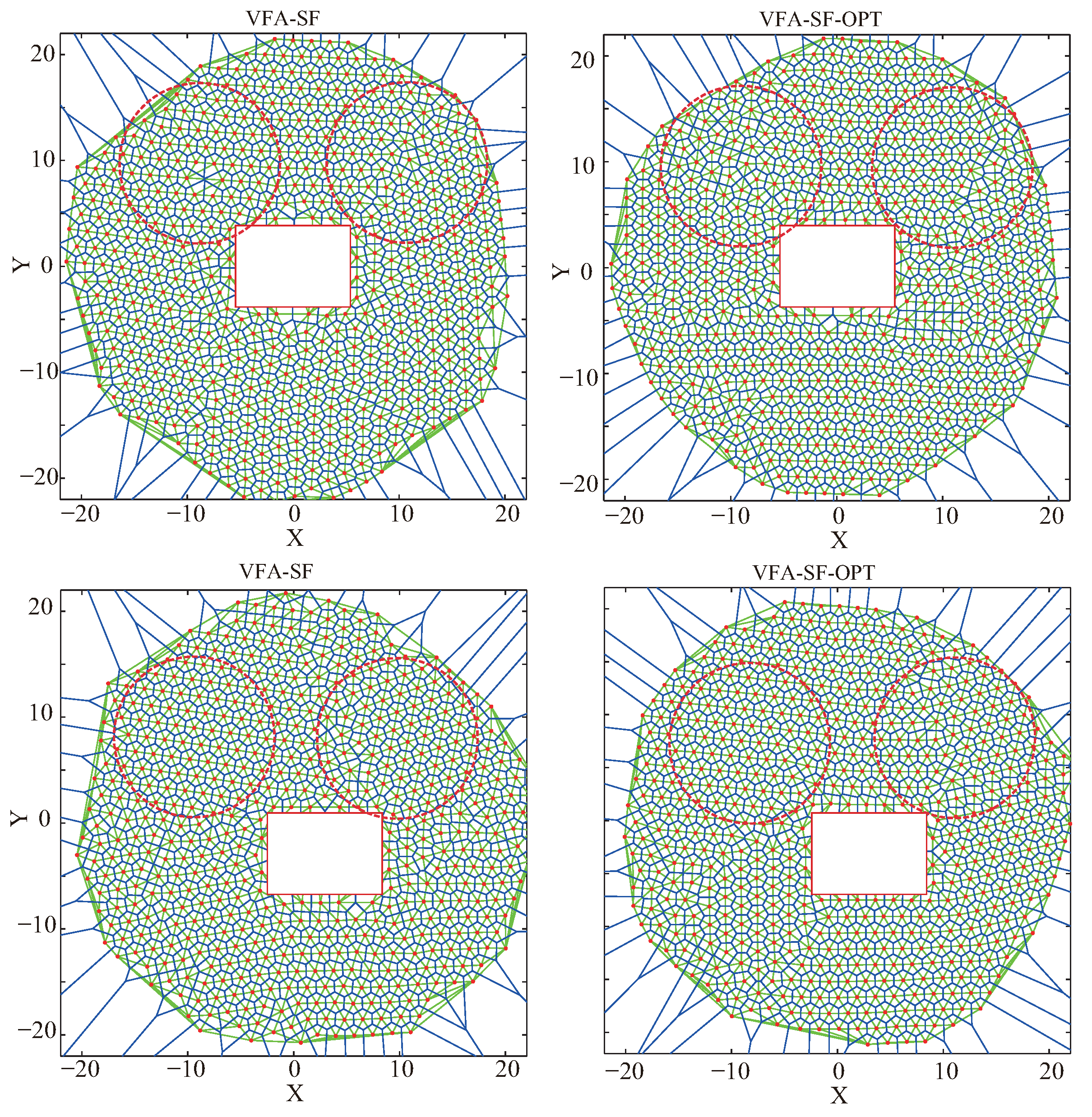
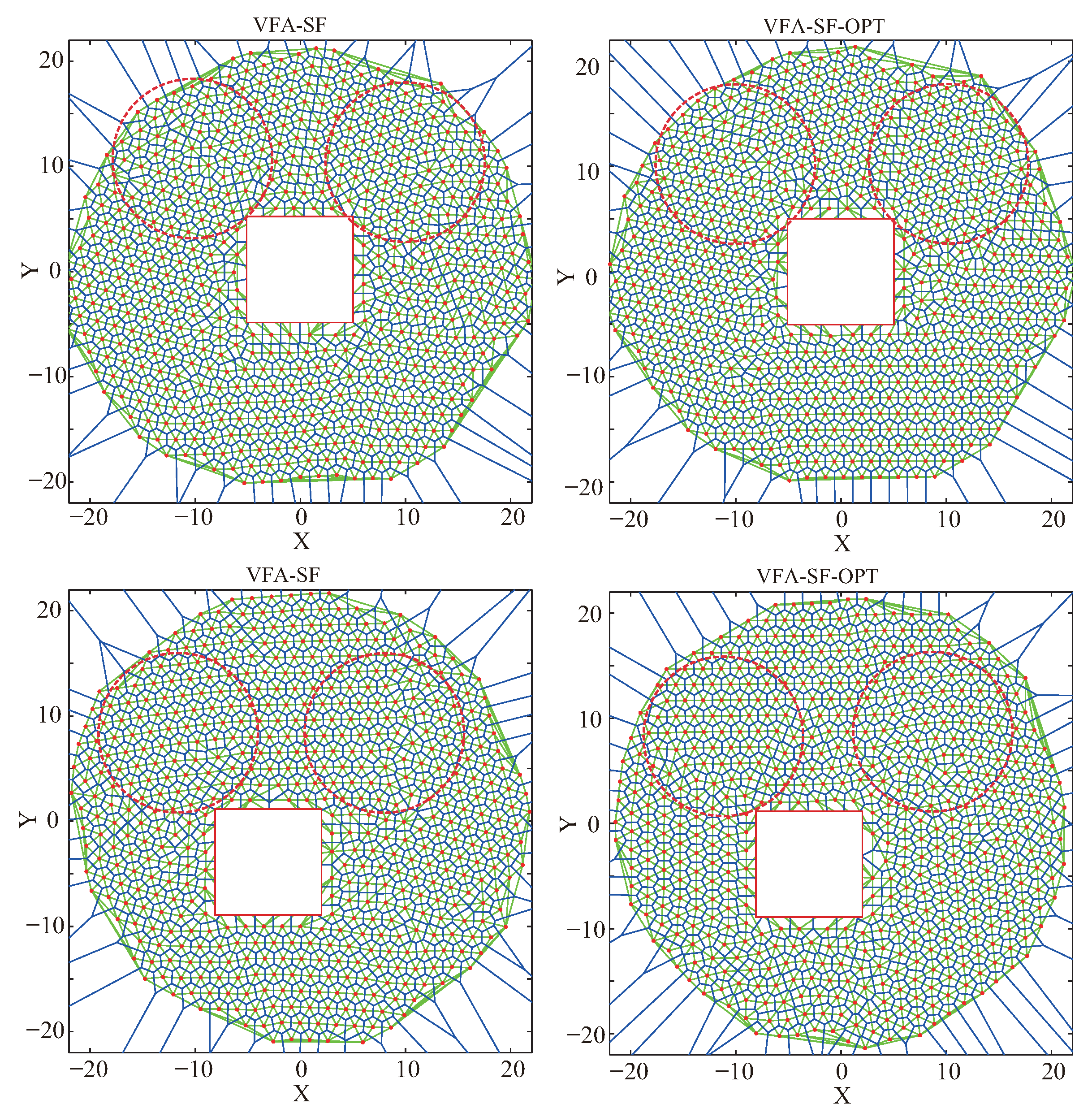
4.4. Effect of Different Obstacles
5. Conclusions
- (1)
- As for the VFA-SF, statistical analysis indicates that, for maximum node velocity, a smaller causes worse node deployment in WSN applications. When , the possibility of a perfect hexagonal network in the final deployment is stable at 42–50%. A larger helps to improve the final network deployment but does not increase the possibility of perfect hexagonal topology. Most importantly, it should be noted that the whole algorithm converges quicker as the limit increases.
- (2)
- In the VFA-SF-OPT optimization, it is very clear that it is harder for smaller external virtual force to eliminate a coverage hole or twisted structure in the final node distribution. When external central force increases, it causes the compression of the central area during the process of optimization deployment. The nodes newly involved in the VFA-SF-OPT need to move for a longer distance and consume more energy. Therefore, experimental should be slightly greater than the optimal value, which is determined based on the requirements of environment scenarios or location accuracy for some real WSN applications.
- (3)
- Experiments of three typical obstacles were simulated by using both the VFA-SF and the VFA-SF-OPT. For the circle obstacle, two algorithms could still obtain good final distributions, and the VFA-SF-OPT had a better effect. However, for the square and rectangular obstacles, final node deployment was worse. This means that the VFA-SF and the VFA-SF-OPT are more useful in a central-symmetry obstacle event based on virtual-spring-force theory.
Author Contributions
Funding
Conflicts of Interest
References
- Patil, M.; Mishra, M.P. Improved mobicast routing protocol to minimize energy consumption for underwater sensor networks. Int. J. Res. Sci. Eng. 2017, 3, 197–204. [Google Scholar]
- Bu, X. Guaranteeing prescribed performance for air-breathing hypersonic vehicles via an adaptive non-affine tracking controller. Acta Astronaut. 2018, 151, 368–379. [Google Scholar] [CrossRef]
- Bai, X.; Kumar, S.; Xuan, D.; Yun, Z.; Lai, T. Delpoying wireless sensors to achieve both coverage and connectivity. In Proceedings of the 7th ACM International Symposium on Mobile AD HOC Networking and Computing, Florence, Italy, 22–25 May 2006; pp. 131–142. [Google Scholar]
- Howard, A.; Matari, M.J.; Sukhatme, G.S. Mobile sensor network deployment using potential fields: A distributed, scalable solution to the area coverage problem. In Proceedings of the 6th International Symposium on Distributed Autonomous Robotics Systems (DARS02), Fukuoka, Japan, 25–27 June 2002; pp. 299–308. [Google Scholar]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization based on virtual forces. In Proceedings of the 22nd Annual Joint Conference of the IEEE Computer and Communications Societies (IEEE Cat. No.03CH37428), San Francisco, CA, USA, 30 March–3 April 2003; Volume 2, pp. 1293–1303. [Google Scholar]
- Garetto, M.; Gribaudo, M.; Chiasserini, C.F.; Leonardi, E. A distributed sensor relocatlon scheme for environmental control. In Proceedings of the Mobile Adhoc and Sensor Systems, Pisa, Italy, 8–11 October 2007; pp. 1–10. [Google Scholar]
- Heo, N.; Varshney, P.K. A distributed self spreading algorithm for mobile wireless sensor networks. In Proceedings of the Wireless Communications and Networking, New Orleans, LA, USA, 16–20 March 2003; pp. 1597–1602. [Google Scholar]
- Zou, Y.; Chakrabarty, K. Sensor deployment and target localization in distributed sensor networks. ACM Trans. Embed. Comput. Syst. 2004, 3, 61–91. [Google Scholar] [CrossRef]
- Kribi, F.; Minet, P.; Laouiti, A. Redeploying mobile wireless sensor networks with virtual forces. In Proceedings of the Wireless Days, Paris, France, 15–17 December 2009; pp. 1–6. [Google Scholar]
- Yu, X.; Liu, N.; Huang, W.; Qian, X.; Zhang, T. A node deployment algorithm based on Van der Waals force in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 2013, 505710. [Google Scholar] [CrossRef]
- Tang, R.; Nie, C.; Qian, X.; Deng, X.; Chen, Z.; Liu, Z.; Xu, X. Optimized node deployment algorithm and parameter investigation in a mobile sensor network for robotic systems. Int. J. Adv. Robot. Syst. 2015, 12, 152. [Google Scholar] [CrossRef]
- Tang, R.; Chen, Z.; Liu, Z.; Qian, X.; Yu, X.; Nie, C. Investigation of the shielding length on yukawa system crystallization in mobile sensor network applications. IEEE Trans. Plasma Sci. 2016, 44, 1025–1031. [Google Scholar] [CrossRef]
- Deng, X.; Yu, Z.; Tang, R.; Qian, X.; Yuan, K.; Liu, S. An Optimized Node Deployment Solution Based on a Virtual Spring Force Algorithm for Wireless Sensor Network Applications. Sensors 2019, 19, 1817. [Google Scholar] [CrossRef] [PubMed]
- Yu, X.; Liu, N.; Qian, X.; Zhang, T. A deployment method based on spring force in wireless robot sensor networks. Int. J. Adv. Robot. Syst. 2014, 11, 79. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameter Values |
|---|---|
| Basic parameters | , , , , |
| , | |
| Spring coefficient | |
| Damping coefficient | |
| (0–300 time steps) | |
| ( after 300 time steps) | |
| External central force | , the theoretical value in the reference [13] |
| in Figure 6 | |
| Radius to calculate PCD | 18, 15, 10, respectively in Figure 1 of Section 4.1 |
| 18 used in Section 4.2 | |
| 10 used in Section 4.3 | |
| red dashed circles in Section 4.4 |
| PCD Value | = 0.05 | = 0.1 | = 0.2 | = 0.6 | = 1.0 | = 2.0 |
|---|---|---|---|---|---|---|
| 0–0.05 | 5 | 6 | 23 | 19 | 24 | 22 |
| 0.05–0.10 | 0 | 0 | 2 | 2 | 0 | 0 |
| 0.10–0.15 | 3 | 4 | 4 | 2 | 3 | 2 |
| 0.15–0.20 | 4 | 1 | 4 | 4 | 2 | 2 |
| 0.20–0.25 | 3 | 7 | 5 | 3 | 3 | 9 |
| 0.25–0.30 | 6 | 7 | 4 | 5 | 5 | 3 |
| 0.30–0.35 | 4 | 9 | 4 | 5 | 4 | 4 |
| 0.35–0.40 | 9 | 9 | 1 | 4 | 7 | 5 |
| 0.40–0.45 | 12 | 4 | 3 | 5 | 2 | 1 |
| >0.45 | 4 | 3 | 0 | 1 | 0 | 2 |
| External Central Force | Average Node Distance | Average Moving Distance |
|---|---|---|
| 0 (only spring force) | 1.7317 | 1.2182 |
| 1 | 1.6964 | 1.6711 |
| 2 | 1.6805 | 2.1062 |
| 3.5 | 1.6682 | 2.6069 |
| 5.5 | 1.6642 | 2.7995 |
| 8 | 1.6602 | 3.0432 |
| 10 | 1.6563 | 3.0828 |
| Node Distance | Moving Distance | Node Distance | Moving Distance | ||||
|---|---|---|---|---|---|---|---|
| 0.3 | 0 | 1.7315 | 1.1759 | 1.0 | 0 | 1.7310 | 1.1759 |
| 1 | 1.6942 | 1.6919 | 1 | 1.695 | 2.0404 | ||
| 2 | 1.6819 | 2.7282 | 2 | 1.6796 | 2.6884 | ||
| 3.5 | 1.6718 | 3.9669 | 3.5 | 1.6641 | 3.1902 | ||
| 5.5 | 1.6692 | 4.2612 | 5.5 | 1.6587 | 3.4111 | ||
| 8 | 1.6561 | 4.1812 | 8 | 1.6544 | 3.4891 | ||
| 10 | 1.6557 | 4.1766 | 10 | 1.6529 | 3.4779 |
| Obstacle | Obstacle Position | PCD Values from the VFA-SF | PCD Values from the VFA-SF-OPT | ||
|---|---|---|---|---|---|
| Left Circle | Right Circle | Left Circle | Right Circle | ||
| circle | at center | 0.1749 | 0.2564 | 0.0652 | 0.0680 |
| circle | off-center | 0.1866 | 0.1507 | 0.0865 | 0.0908 |
| square | at center | 0.3687 | 0.2979 | 0.1916 | 0.1569 |
| square | off-center | 0.3772 | 0.3549 | 0.2108 | 0.2915 |
| rectangular | at center | 0.4167 | 0.4038 | 0.2218 | 0.2556 |
| rectangular | off-center | 0.3824 | 0.5683 | 0.2040 | 0.2829 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Tang, R.; Yuan, K.; Lin, H.; Qian, X.; Deng, X.; Liu, S. Investigation of Parameter Effects on Virtual-Spring-Force Algorithm for Wireless-Sensor-Network Applications. Sensors 2019, 19, 3082. https://doi.org/10.3390/s19143082
Yu Z, Tang R, Yuan K, Lin H, Qian X, Deng X, Liu S. Investigation of Parameter Effects on Virtual-Spring-Force Algorithm for Wireless-Sensor-Network Applications. Sensors. 2019; 19(14):3082. https://doi.org/10.3390/s19143082
Chicago/Turabian StyleYu, Zhiyong, Rongxin Tang, Kai Yuan, Hai Lin, Xin Qian, Xiaohua Deng, and Shiyun Liu. 2019. "Investigation of Parameter Effects on Virtual-Spring-Force Algorithm for Wireless-Sensor-Network Applications" Sensors 19, no. 14: 3082. https://doi.org/10.3390/s19143082
APA StyleYu, Z., Tang, R., Yuan, K., Lin, H., Qian, X., Deng, X., & Liu, S. (2019). Investigation of Parameter Effects on Virtual-Spring-Force Algorithm for Wireless-Sensor-Network Applications. Sensors, 19(14), 3082. https://doi.org/10.3390/s19143082