1. Introduction
There are at least two main concerns when dealing with structures presently. First, the global and fast-paced growth of modern constructions, to cater to the most diverse needs of the population, demands an increasingly rigorous performance from engineering areas. Second, due to the law of supply and demand, the concern to reduce costs and deadlines for concluding those works may decrease rigor in executing projects and the lifespan of construction. Consequently, corrosion and material fatigue may accelerate the occurrence of structural damage [
1]. Moreover, regarding modes of transportation, there is no doubt that pipelines are the best options to distribute water, gas, oil, and fluids in general, not only because they present lower costs when compared to terrestrial, railway, and air transport, but also because they are considered safe.
In this sense, structural health monitoring (SHM) is an area that has been growing significantly in the last few years since industrial engineers and academic researchers are becoming increasingly concerned with the health of structures such as pipelines. Therefore, they continuously seek systems and mechanisms to monitor structural health for detecting damage and/or gas or liquid leakage, to guarantee higher safety levels to users and the environment, as well as to reduce costs [
2,
3,
4,
5]. There are many methods according to the stages of SHM systems, but in the present work, the focus is the damage detection by means of the electromechanical impedance technique (EMI), which is based on low cost PZT (Pblead Zirconate Titanate) piezoelectric transducers. Such transducers are extremely sensitive in detecting local damage [
2,
4,
6,
7] and allow the implementation of non-invasive SHM systems. The basic principle of the EMI technique is to monitor the changes in the mechanical impedance of a structure, caused by alterations in its dynamic response, due to the presence of damage or even due to temperature variation. Considering that measuring the mechanical impedance of a structure is a complex task, PZT piezoelectric transducers are attached to the structure to monitor its mechanical impedance through measuring the electrical impedance, which is simpler to implement [
8,
9].
There are many studies and techniques to monitor the structural behavior of ducts and pipes based on EMI, in which the goal is to identify damage and/or leakage. One of the first studies involving pipelines was to assess a pipeline structure connected through flanges. The authors used a HP4194 impedance analyzer to measure the real part of the impedance, on a frequency range from 80 to 100 kHz, seeking to detect and analyze damage, as the screws of those flanges were removed [
10]. In another work, tests were performed in the same pipeline structure, but this time using HP36665A impedance analyzer to detect five types of damage in the 35–47.8 kHz frequency range [
11]. Both works presented good results, but did not explore the temperature variation effect. Another important work was developed using five MFC (Microfiber Composer) transducers, which are flexible and have similar characteristics to traditional piezoelectric ceramics. A tubular structure was monitored to analyze pipe-coupling flanges where the screws were loose to generate damage to the structure. A 4294 Agilent impedance analyzer was used to obtain measuring data, in two frequency ranges, 50–60 kHz and 110–120 kHz [
12]. In such case, the major problem was the absence of a study about the effect of the temperature. In [
5], there were experimental tests in tubular structures of different types and sizes of piezoelectric ceramics. For damage detection, two damage metric indices were used, the RMSD (Root Mean Square Deviation) and the CCDM (Correlation Coefficient Deviation Metric). The authors demonstrated that damage detection in tubular structures using low cost piezoelectric transducers is viable. In Ref. [
4], the authors carried out a review of several damage detection methods based on guided waves and applied to different types of structures, including pipelines, showing the advancements in recent years. Generally speaking, some experiments present difficult replication, especially considering different shapes and sizes of the structures.
In EMI-based damage detection techniques, in a general way, it can be observed that the execution of experiments to demonstrate the efficacy of such techniques is somewhat limited due to some reasons. In the case of sensors, for example there is a variety of PZT types, with different compositions, geometry, and stiffness. In the case of structures, there may be some differences on the type of material, size, and geometry. In addition, to perform an experiment, it is still necessary to damage the structure or simulate damage by placing small screws on the structure, for example. Such combinations may difficult some types of experiments. Therefore, to simplify the study and development of SHM techniques based on EMI, numerical methods are considered. A variety of options become possible when using numerical methods, since frequency response functions (FRF), which correspond to the electrical signatures studied on the EMI technique, can be characterized and analyzed by means of modeling and simulation programs based on finite elements analysis. Thus, in many cases, commercial finite element (FE) modeling software packages are used to analyze and simulate SHM systems based on EMI [
13]. This way, there are several studies that use numerical simulators based on FE, such as ANSYS, PZFlex, or ABAQUS, all applied to SHM systems.
From the moment that the numerical analysis began to be explored in the EMI context, many works have emerged. In Ref. [
13], the authors modeled and analyzed a simple aluminum structure using ANSYS software, with variations in size and thickness of the sensors, and with different coupling to the structure (bonded or loose). Efficiency assessment was based on the analysis of the real part of the PZT impedance, which was considered efficient in detecting local damage. In Ref. [
14], the authors used the software ABAQUS to model, via finite elements, underground oil pipelines and analyze the propagation characteristic of the guided waves generated by a PZT. Different types of damage were simulated, and the detection was performed using guided waves with a 70 kHz central frequency. The numerical results were compared to practical ones (measurements) and were considered satisfactory [
15].
Despite many previous studies on monitoring the pipeline and ducts structural integrity using the EMI technique, there is not a definitive solution yet. The major problem is compensating the temperature variations, as they affect the transducers properties and hinder real applications. Thus, the environmental temperature variation is cited in the literature as a critical problem for applications based on EMI since small alterations in temperature may cause significant changes in the electrical impedance signature of PZT transducers, on the same level of small damage [
16].
In this context, many authors have investigated the effects of temperature variation for detecting structural damage based on EMI and have proposed solutions to compensate such variations [
9,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27]. The most recurrent effects observed on EMI signatures are horizontal (frequency) and vertical (magnitude) shifts. Each technique proposed presents its advantages and limitations, which are present in the following.
Among the methods applied to compensate those shifts, there exist the ones based on effective frequency shift (EFS) and correlation analysis, and its variations [
9,
16,
18,
19,
20,
21]. The main limitation of this approach is that the EFS is constant over the frequency range; however, it was observed by some authors [
9,
16,
19] that the frequency shift changes according to the frequency of the resonance peak analyzed, since it usually increases as the frequency range increases. Therefore, this proposal reaches suitable results for narrow frequency ranges and it loses efficiency as the frequency range increases due to the frequency shift not be constant over large frequency spectrums. To overcome this drawback, in [
19], the entire compensation range was broken into small sub-bands. For compensating the vertical shifts, some of the EFS method usually incorporates a shift based on the difference of mean values of the signatures, with some variations [
9,
18,
20,
21]; however, when the temperature range becomes large, some authors considered the use of more than one baseline in order to have a more precise vertical compensation [
9]. On other studies, normalization is used to reduce the vertical shift [
19].
Ref. [
22] uses Lagrange interpolating polynomials for generating a compensated baseline at a given temperature. First, a horizontal compensation was done by tracking the peak impedance value of the impedance range. Second, a 2nd degree Lagrange interpolation was used to compensate the vertical shifts. One advantage is that this approach accounts for nonlinear (quadratic) dependence of the vertical shifts; however, the horizontal shift applied appears to be similar to the EFS approach, which is effective only for narrow frequency ranges.
Ref. [
23] proposed a normalized linear temperature-dependent coefficient for compensating the EMI signatures since the goal of the temperature compensation is to eliminate the temperature effect of the PZT sensor only, for a temperature range from 80°F to 160°F. This proposition does not eliminate the horizontal shift.
Other authors applied the linear principal component analysis (PCA) to filter out and remove the temperature effects on impedance signatures [
17,
25,
26]. In Ref. [
26], the damage detection in prestressed tendon anchorages was conducted by filtering impedance signatures; however, accuracy depends on the choice of the principal components, which are significantly influenced by the temperature variation. Overall, the study lacks investigations regarding wider temperature and frequency ranges.
In addition, several EMI damage detection systems based on pattern recognition algorithms have been developed using Artificial Neural Network (ANN) [
28,
29]. Moreover, among the ANN architectures, the radial basis function (RBF) is considered a powerful curve fitting tool [
24]; thus, they have been applied for compensating the temperature effect in impedance-based SHM systems [
24,
27]. More specifically, Ref. [
27] designed an RBF network-based regression algorithm for training a set of baseline measurements at various temperatures to compensate the temperature effect for each frequency sample of the EMI signatures. The authors also considered that the electrical impedance was a function of temperature and frequency; however, in this approach, it is not necessary to know how this dependence behaves (i.e., linear or quadratic). When using ANN, it is necessary to train the network in several different situations so that it can learn the pattern and present the correct result for untrained situations. In this study, to achieve accurate results, it was necessary the use of at least 168 training patterns. This is a large amount of pre-stored information, which is not always possible to obtain. Moreover, the computational load increases with the increase of the frequency range (number of frequency samples).
Nevertheless, considering that the accuracy on the temperature measurements is crucial when applying temperature compensation techniques and that the temperature on the structure could vary heterogeneously depending on its size or type of material, references [
30,
31] take advantage of the electrical impedance temperature dependence, so that the signatures themselves can be used for estimating the temperature of the PZT and structure, and for monitoring the soil freezing-thawing process, which is important for underground pipelines. By doing so, any temperature compensation technique becomes more economical since temperature sensors are not necessary anymore.
Moreover, the use of numerical methods and analytical models is becoming an important alternative for the study and development of temperature variation compensation methods since the temperature dependence of the PZT’s and structure’s properties can be analyzed separately [
32,
33].
On the basis of the previous works, the contributions of this paper lie in the following: First, this work outlines a complete analytical, numerical, and experimental study on the effect of the temperature on damage detection in pipelines, based on the EMI technique. Second, this study proposes an innovative approach for compensating the temperature effects on damage detection. The proposed method eliminates temperature effects through a simples and practical compensation method based on linear interpolation, which can be applied mainly to structures that present impedance amplitude and frequency shifts with linear dependence of the temperature and frequency. This paper introduces an algorithm with a very low computational complexity. The proposed method aims to use a minimum number of previously stored baselines. Third, this study examines two different damage metric indices (RMSD and CCDM indices) to evaluate damage detection in tubular structures. Finally, the feasibility of the proposed computational algorithm is verified by monitoring healthy and damaged structures under temperature-varying condition. The proposed method was tested in two steel pipes, compensating the temperature effect ranging from −40 °C to +80 °C, with analysis on the frequency range from 5 kHz to 120 kHz.
2. EMI Technique and the Effect of Temperature
The EMI technique is based on the piezoelectric effect, which allows establishing a relation between the mechanical properties of the host structure and the electrical impedance of the PZT transducer attached to the structure. This relation states that any change in the mechanical impedance of the structure will produce a variation in the electrical impedance measured through the PZT transducer. The electromechanical interaction of a PZT patch with its host structure is described by Equation (1) [
8,
20,
23,
34]:
where
Y is the electrical admittance (inverse of impedance
Z),
Za is the mechanical impedance of the PZT,
Zs is the mechanical impedance of the structure,
is the Young’s modulus of the PZT at zero electric field (inverse of compliance),
d3x is the piezoelectric strain constant at zeros stress,
is the permittivity at zero stress,
Wa is the width of the PZT,
la is the length of the PZT, and
ha is the thickness of the PZT. The parameter
δ is the dielectric loss factor. As mentioned before, temperature changes cause significant variations on the electrical impedance [
16,
23,
32,
35]. That occurs because the properties of the structure and the PZT, represented by the parameters in Equation (1), are affected by temperature [
36,
37].
2.1. Effect of Temperature on Parameters of the PZT
The piezoelectric ceramic parameters are highly dependent on temperature. The dielectric constant
is known to vary significantly with temperature [
21,
23]. Usually such dependence is nonlinear, but it may be characterized by a quadratic or cubic function. The Young’s modulus at zero electric field of PZT,
, is known to be slightly temperature dependent and it is affected by changes in the electric field [
23,
36]. Also, the piezoelectric coupling constant,
d3x, in the arbitrary
x direction at zero stress, is known to vary slightly with temperature. An increase in temperature leads to a very minimal increase in
d3x [
23]. Due to the thermal expansion coefficient, the PZT dimension, represented by
Wa,
la, and
ha, varies with temperature. Although such variations do affect the PZT operation, most parameters can be modeled as linearly temperature dependent.
To characterize the behavior of the resonance frequencies depending on the temperature, each of the parameters is represented by one type of function, linear or quadratic, considering the observed variation. Besides that, considering the complexity to represent impedances
Za and
Zs on Equation (1) as a function of frequency and temperature, the authors use the following equivalent equation:
where
a1,
b1,
a2, and
b2 are only constants.
Deriving the expression proposed on Equation (2) in relation to
ω and equaling to zero, the resonance frequencies are obtained. An approximation that specifies the frequencies of resonance as a function of the temperature, according to the requirements of Equation (2) is given by:
where
a3 and
b3 are only constants.
For a more precise analysis, real data obtained from each parameter would have to be considered, but unfortunately piezoelectric materials manufacturers do not provide such information. The linear temperature dependence of the resonance frequencies, Equation (3), will be evaluated when analyzing the experimental and simulated results.
In this work, for the development of a PZT/structure coupled system model considering the effect of temperature, it was necessary to characterize the main temperature-dependent parameters of both structure and PZT. To adequately model the piezoelectric materials, information on all its 13 independent parameters must be provided [
38]. The values of the material’s coefficients in relation to temperature, for the EC-65 PZT (which is the equivalent of a PZT 5A), were obtained from [
37]. Based on these results, the values of the following parameters were computed, ranging from −40 °C to +80 °C:
and
. On the other hand, regarding the density and mechanical
Q factor, their values were not characterized as a function of temperature, so the values provided by the manufacturer at room temperature were considered. The elasticity coefficient
was calculated according to [
39], as follows:
2.2. Effect of Temperature on Parameters of the Structure
The second term of Equation (1) includes the mechanical impedance for both PZT (
Za) and host structure (
Zs). When the PZT is bonded to the structure,
Za is fixed and, therefore,
Zs exclusively determines the contribution of the second term for impedance final value. The contribution of the second term is shown in the spectrum of impedance as sharp peaks on the electrical impedance. Since such peaks correspond to a specific structural resonance, they constitute a unique description of the dynamic behavior of the structure [
23]. Thus, considering that
Zs depends on the excitation frequency and temperature and that the Young’s modulus of the structure varies slightly in relation to the temperature [
23,
40], the effect of the variation of
Zs is an alteration of the resonance peaks, producing, especially, a frequency shift. Therefore, to take in account the temperature dependence of the structure, the density of the steel as a linear function of temperature and its thermal expansion coefficient, 12 × 10
−6 °C
−1, were used on the simulation.
2.3. Correlation Coefficients to Compare Simulated and Experimental Responses
To validate the electrical impedance measurements, the coefficient of correlation of Pearson (CC) was used in both experiment and simulation. The coefficient of correlation of Pearson (CC) is usually used to measure the degree of correlation between two variables of metric scale. Thus, Equation (5) is used to assess the degree of correlation between the two electrical impedance signatures ZE and ZS, obtained through simulation and experimentally, respectively. and are the average values of these signatures for the selected frequency range ( to ).
On the other hand, there is the coefficient of correlation of Spearman, which is also used to compare and validate two results. Such coefficient, frequently described as “non-parametric”, is generally used to relate linear and nonlinear systems. A perfect Spearman correlation occurs when the variables ZE and ZS are related to any monotonous function, in contrast to Pearson’s correlation, which gives a perfect correlation when ZE and ZS are related by a linear function. Thus, Equation (6) is used to assess the coefficient of Spearman.
When applying Equations (5) or (6), an analysis of the coefficient of correlation is done,
CC or
rs. To obtain a very strong positive correlation, the value must be between 0.80 and 1.00 [
41].
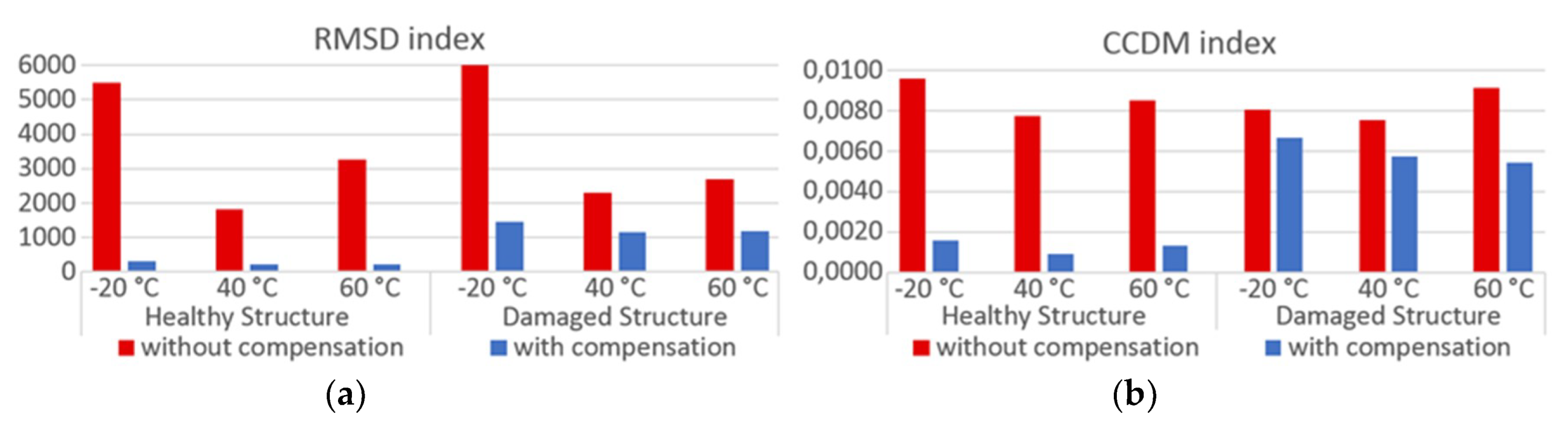
5. Effect of Temperature on Impedance-Based Damage Detection
In the EMI technique, two electrical impedance signatures are compared to detect changes in the dynamic response of the structure. A monitoring signature is compared to a baseline signature, previously registered as a healthy structure. In the occurrence of damage, the monitoring signature will exhibit horizontal and vertical shifts in relation to the baseline signature. However, according to the literature and to the analysis presented in this work, the damage detection systems based on EMI present a strong dependence on temperature, and, therefore, any change associated with a temperature variation can be confused with damage, which means the detection of a false positive.
For comparing both signatures, there are statistic indices or damage metric indices, normally based on the CCDM and RMSD. Overall, the CCDM index is more sensitive to changes in the shape of the impedance signature and the RMSD is more sensitive to variations in amplitude of the impedance signature. The smaller the metric values, the “closer” are the signatures [
23].
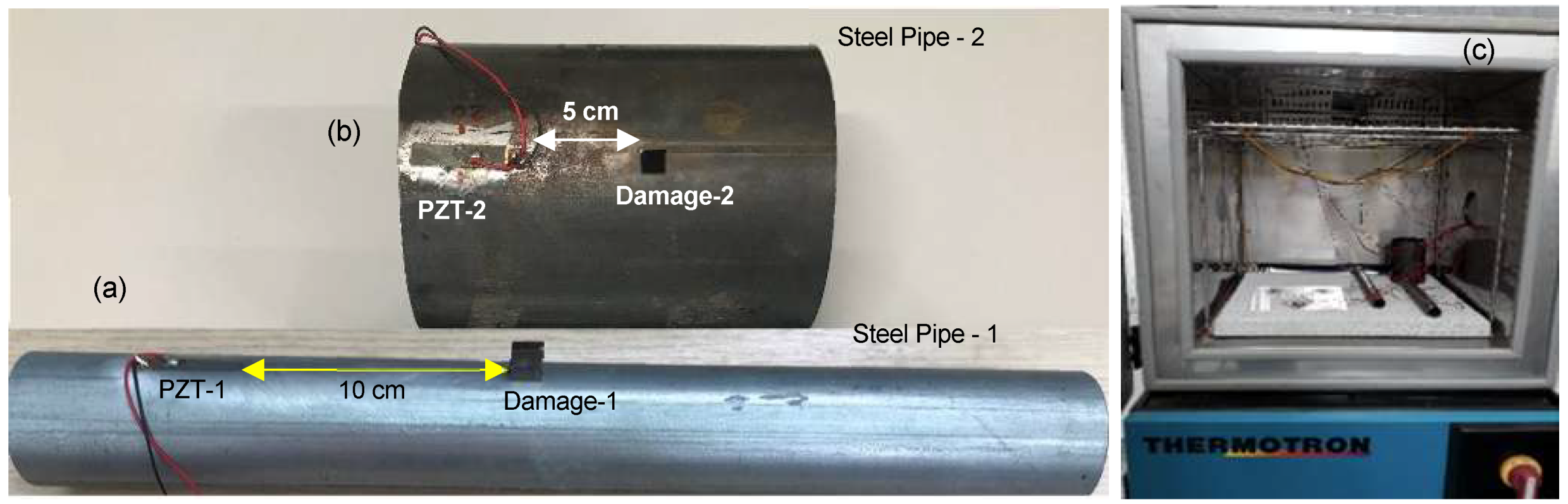
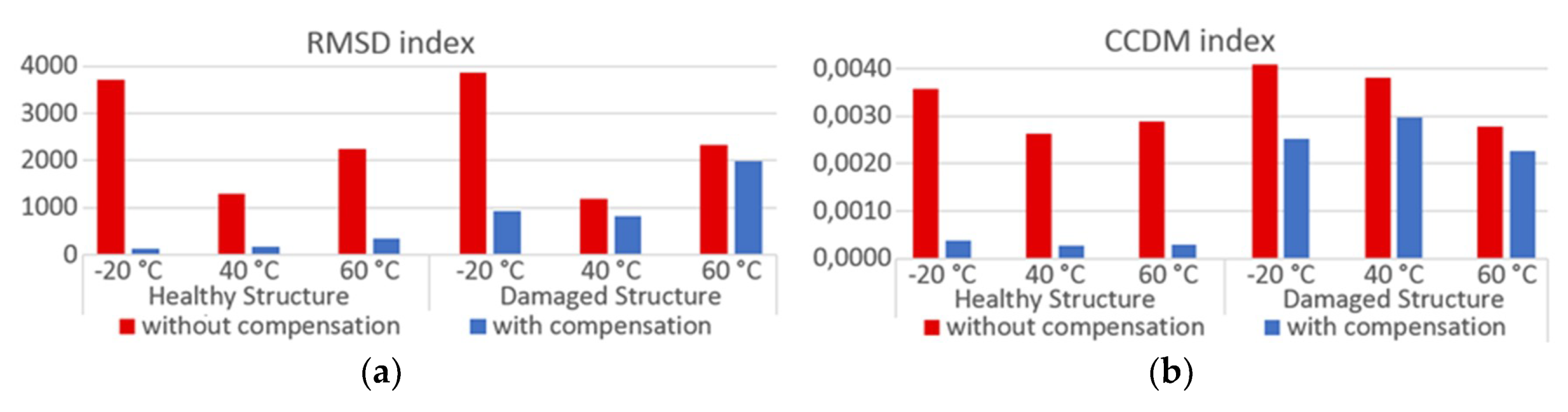
In this section, to calculate the CCDM and RMSD indices, the monitoring and baseline signatures obtained experimentally for pipe-1/PZT-1 were compared. The reference baseline signature was measured at +20 °C. The monitoring signatures were measured in two different situations. First, three baseline signatures were obtained only changing the temperature to +40 °C, +60 °C and +80 °C. Second, with the damage-1 attached to the structure, the monitoring signature was also measured at +20 °C.
Figure 10 shows the indices calculated for the frequency range from 5 kHz to 40 kHz.
In
Figure 10, it is observed that the real damage (red bar) presented a RMSD value lower than the values obtained by only changing the temperature, and a CCDM value very close to those obtained due to the temperature variation. In other words, in a real scenario, the temperature variation can cover real damage and it can also indicate false damage. The values of the indices get higher as the temperature increases. The same was observed when the temperature decreases, with the most significant differences registered for temperatures under 0 °C.
Therefore, for the EMI technique to be effectively employed, it is extremely required that the SHM systems include techniques or mechanisms to compensate the effects of temperature variation in the electrical impedance measurements from PZT sensors. In the following section, two mechanisms to perform the compensation of the temperature effect are presented.
6. Compensation of Temperature Effect in Impedance-Based SHM Systems
As exposed in the literature, several researchers have proposed solutions to compensate the temperature effect, but each of them indicates some restrictions, such as limitation for frequency and temperature ranges, the need for a large number of signatures and, in some cases, algorithms with high computational load. In this sense, the main challenge is still the search for new models to effectively compensate the temperature effect over wide frequency and temperature ranges.
Thus, considering the discussions of
Section 4 and
Section 5, in this section, two algorithms to compensate temperature effects are presented. Based on all numerical analysis, the vertical shifts are assumed to be linearly dependent of temperature and the horizontal shifts are assumed to be linearly dependent of temperature and frequency. It is known that these dependences could be nonlinear for other structures; however, since for the simulated structures the linear dependence was observed, the linear compensation method explained in this section was established. The proposal also considers that in fact, there are structures or systems, such as aircraft for instance that operate in extreme temperatures.
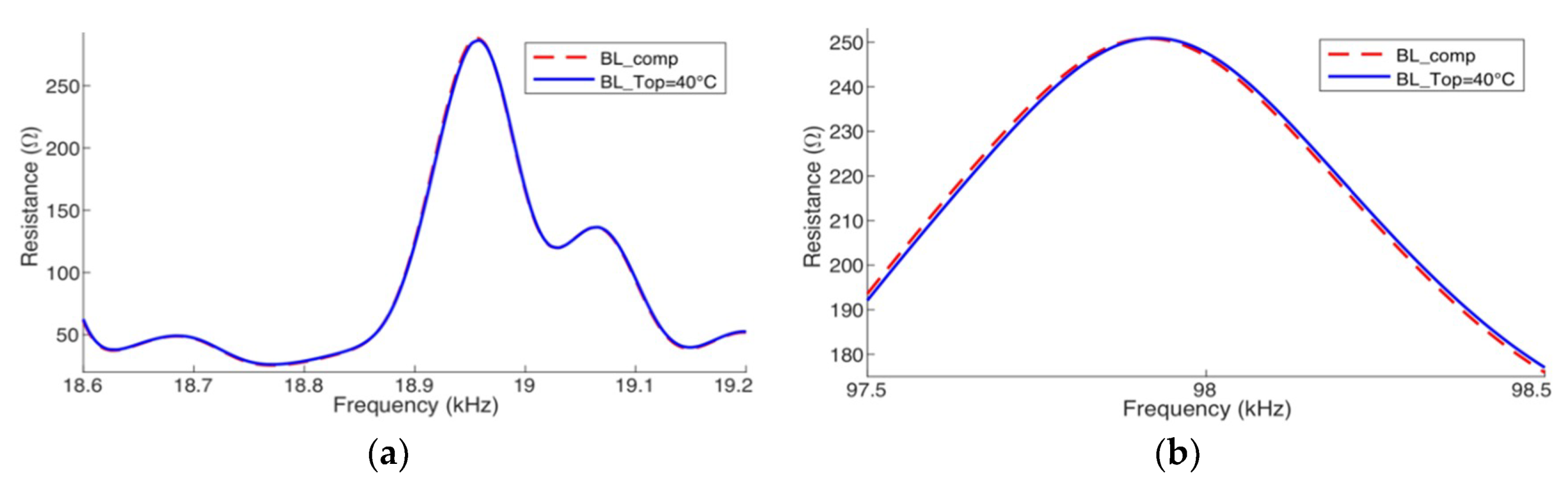
For the application of the method, at least two reference baseline signatures measured at different temperatures (BLT1 and BLT2) should be registered and stored before monitoring the structure. The method consists of estimating, based on a reference baseline, a new baseline (BLcomp) for the temperature of operation (Top), in which the monitoring will be performed. First, one of the reference signatures is compensated in frequency until reaching the temperature of operation. Next, the compensation in amplitude is made.
In the following sections, two algorithms to compensate the temperature effect are presented: the first one is to compensate the frequency shifts (horizontal compensation), while the second compensates for the amplitude variations (vertical compensation).
6.1. Algorithm to Compensate the Frequency Shifts: Horizontal Compensation
From the conclusions of
Section 4.1,
Section 4.3 and
Section 4.4, two important aspects that aim at properly compensating the frequency shift are highlighted. The first is that the electrical impedance signature suffers a horizontal shift to the left as the temperature increases and vice-versa as shown in
Figure 7. The second is that the impedance values range throughout a linear trendline as the temperature changes, but the inclination depends on the frequency. In this case, the higher the frequency, the smaller the inclination, as shown in
Figure 8.
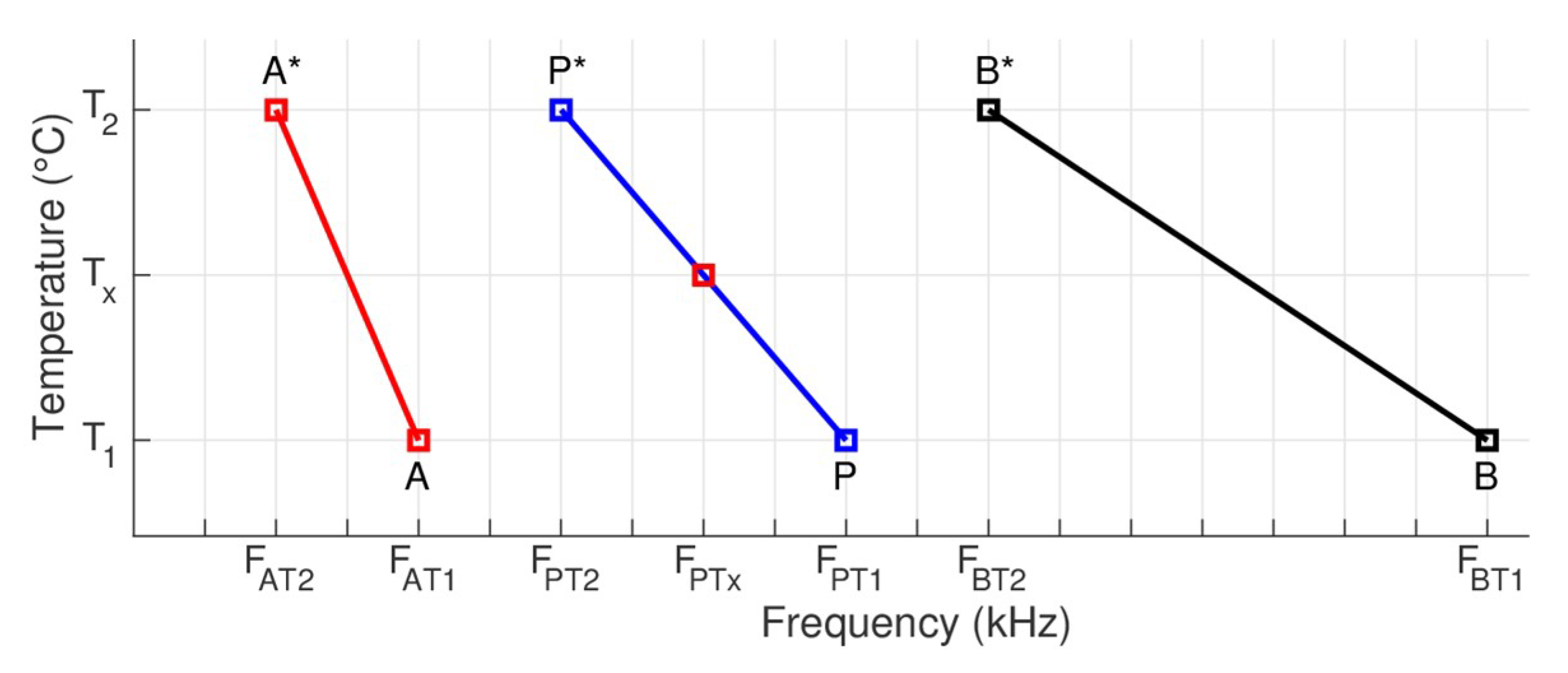
Therefore,
Figure 11 illustrates the information of two resonance peaks, identified as
A and
B for temperature
T1 and, identified as
A* and
B* for temperature
T2. These peaks should correspond to two reference baselines, known and measured at temperatures
T1 and
T2. In the figure,
FAT1 and
FAT2 are the frequencies of peak
A obtained at temperatures
T1 and
T2, respectively, while
FBT1 and
FBT2 are the frequencies of peak
B obtained at temperatures
T1 and
T2, respectively.
Thus, the goal is to calculate the frequency shift and determine the new
FPTx, frequency of a given impedance measurement
P, measured at the temperature
Tx. In the method, once
P is chosen, first, the frequency of
P* should be calculated. In this case,
P corresponds to a signature obtained at
T1 and
P* a signature obtained at
T2, where
FPT1 is the frequency of
P obtained at temperature
T1 and
FPTx is the frequency that would correspond to
P at temperature
Tx. Then, according to
Figure 11, while the frequency of
P might vary between the frequencies of
A and
B for the temperature
T1, the frequency of
P* may vary between the frequencies of
A* and
B* for the temperature
T2.
For this, Equation (7) defines the proportion between the frequency shifts from A to P and from A to B.
From Equation (7) and isolating FPT2, in Equation (8) the frequency of P can be calculated for the temperature T2.
In the triangle-rectangle that has as hypotenuse
P −
P*, the equivalences presented in Equations (9) can be similarly obtained:
Therefore, based on (9), isolating FPTx, in (10) there are two alternatives to calculate the frequency of P for the temperature of the operation Top = TX.
The use of the first expression (left side) is recommended if the temperature T1 is closer to Top. However, if the temperature T2 is closer to Top, it is recommended using the second expression (right side). The process is iterative; therefore, it must be repeated for all frequency samples, in other words, the impedance measurements that are intended to compensate. Nevertheless, it is clear that the process of horizontal compensation depends on the frequency.
6.2. Algorithm to Compensate the Amplitude Shift: Vertical Compensation
Based on the finding of
Section 4.2,
Section 4.3 and
Section 4.4, to compensate the amplitude shift, there are two hypotheses. The first is that the impedance amplitudes vary linearly with temperature, since, as the temperature increases, the amplitude decreases following a linear trendline. The second is that the higher the amplitude, the bigger the vertical shift. Therefore, for the amplitude compensation, a shift is applied for each frequency sample, depending on the temperature and on the amplitude of both reference baseline signatures aligned in frequency. For this reason, the horizontal compensation must be performed first.
Then,
Figure 12 illustrates the information of just one resonance peak, identified as
A1 and
A2, which corresponds to the reference baseline signatures, registered at temperatures
T1 and
T2, respectively. Before applying the method, the reference baseline signatures should be aligned in frequency, in other words, the frequencies of
A1 and
A2 should be the same. This way, for the first hypothesis,
A1 and
A2 belong to the same line. Therefore, for the same frequency sample, the (
Ax) amplitude for any operation temperature (
Tx) will be also located at the straight line.
Applying the similarity of triangles, Equation (11) is defined, in two ways, as the proportion between the amplitude shifts as a function of temperature.
From Equation (11), isolating AX, in Equation (12) there are two alternatives to calculate the amplitude for the temperature of operation Top = TX.
In this case, it is also recommended using the first expression (left side), if the temperature T1 is closer to Top. However, if the temperature T2 is closer to Top, it is recommended using the second expression (right side). The process is iterative and should be repeated for all frequency samples, i.e., the impedance measurements that are intended to compensate.
8. Conclusions
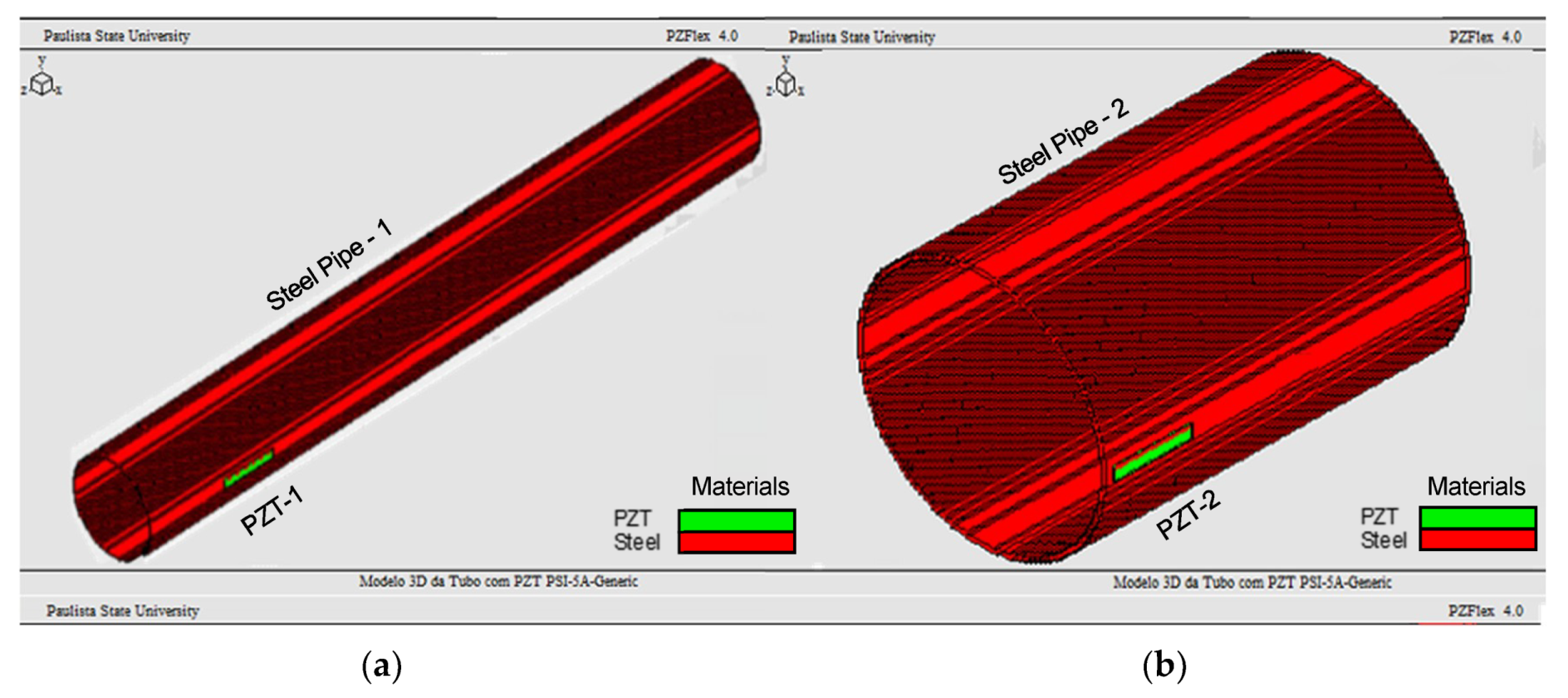
The present work has two important contributions related to EMI-based SHM systems, regarding the use of steel pipes. First, by modeling using finite elements, the EMI behavior under the temperature effect in two different situations are characterized, changing the values of PZT or/and pipe parameters as a function of temperature. Second, it proposes a new method to compensate the effect of temperature variation.
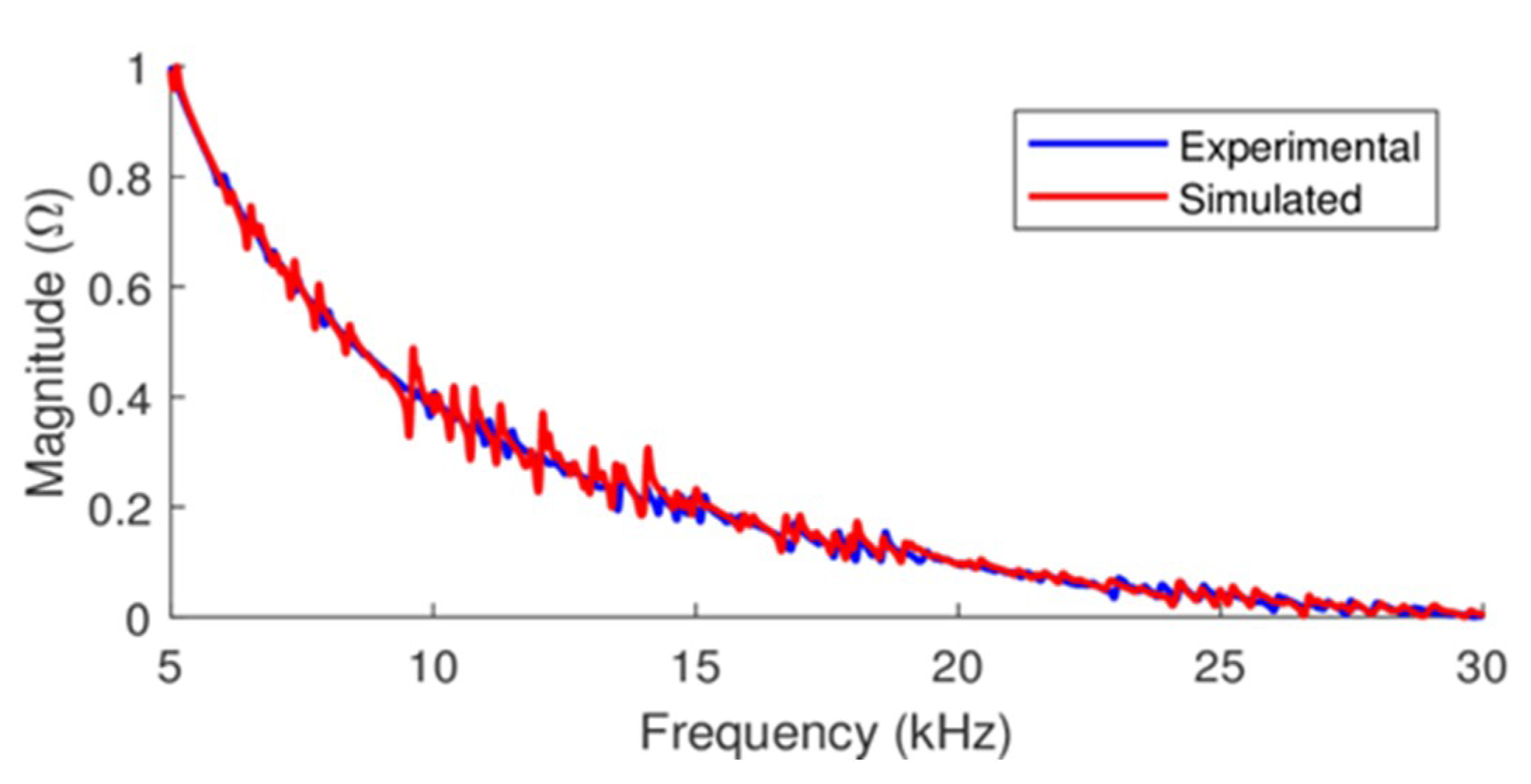
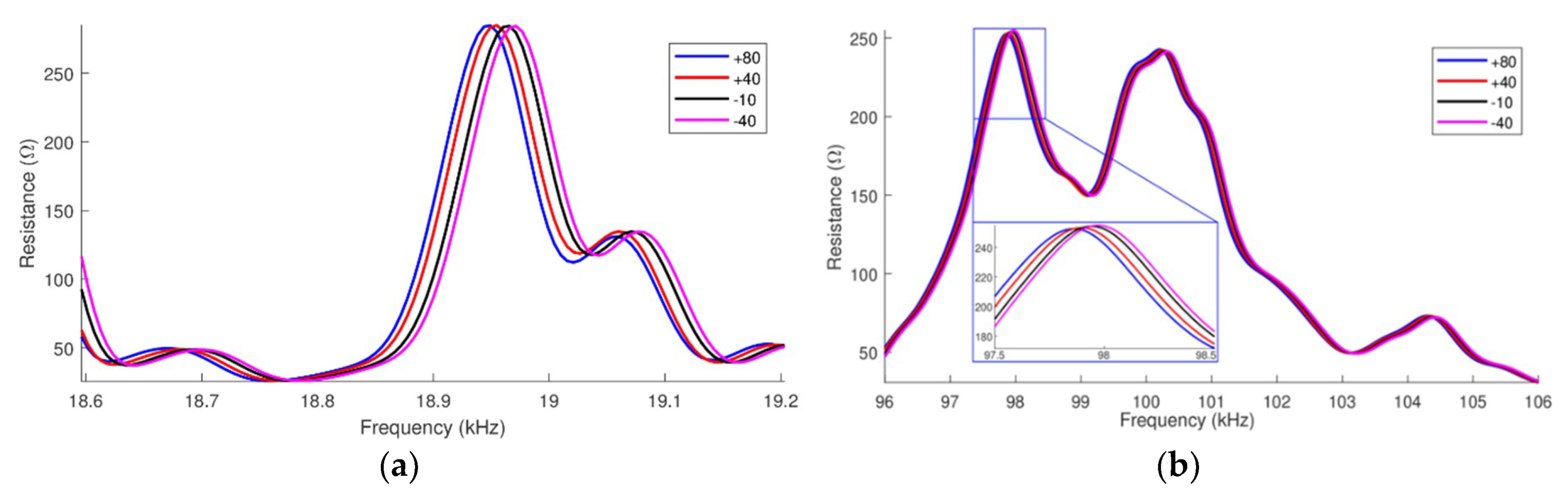
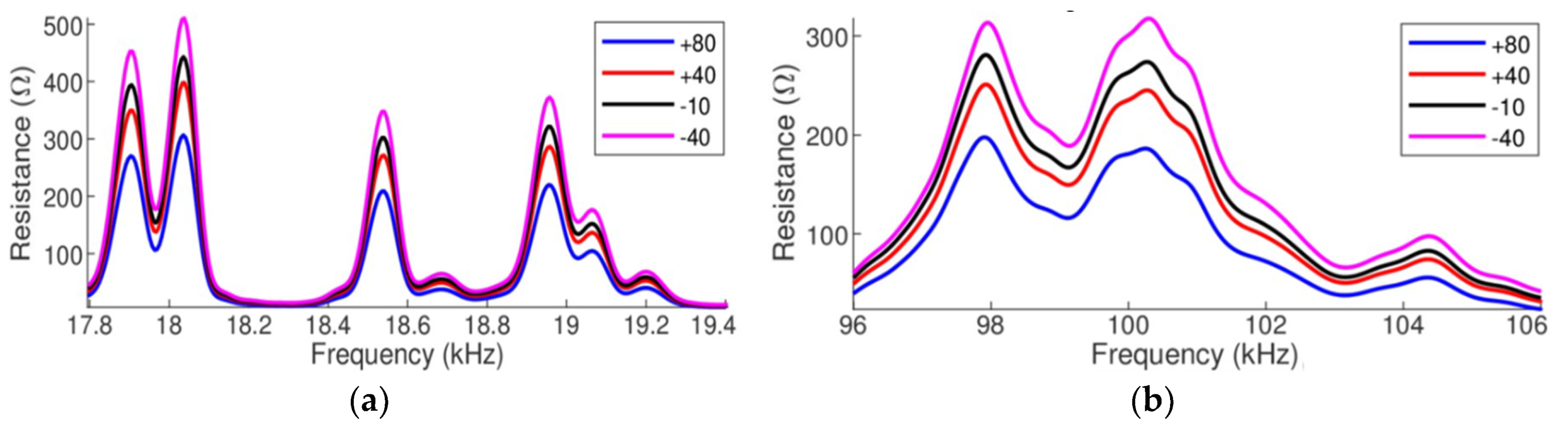
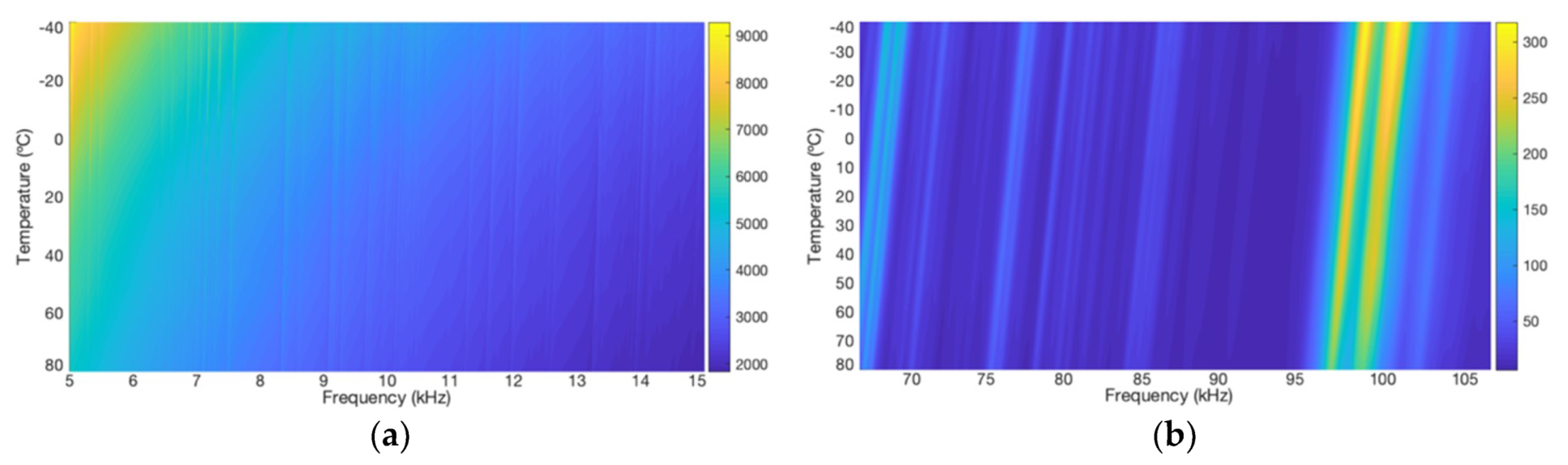
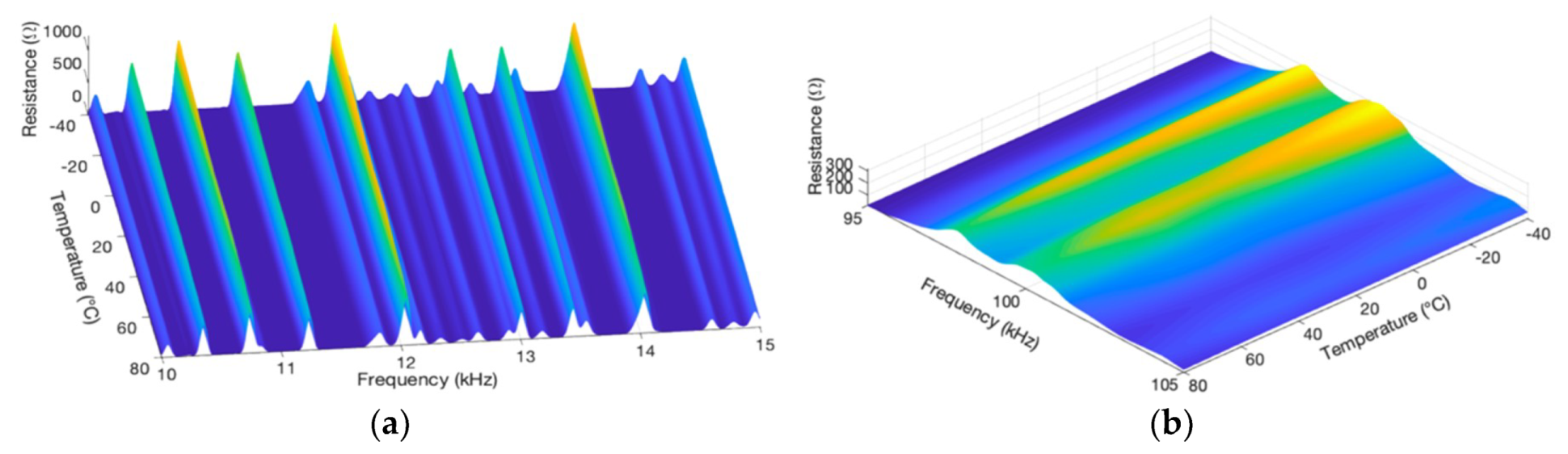
Initially, a numerical model was developed using the PZFlex® software. The results obtained from the experimental measurements and from the software were strongly correlated. Therefore, using a simulator, the alterations to the EMI signatures due to temperature variation were investigated and characterized. It was verified that by only changing the parameters of the steel pipe as a function of temperature, there is a frequency shift of the impedance to the left, as the temperature increases, and there is practically no variation in amplitude. However, changing the PZT parameters, it was observed that there are alterations in the EMI signature amplitudes and shifts in frequency. Finally, when changing the parameters of both pipe and PZT, the effects are added to each other.
Secondly, a new approach was developed to compensate the temperature effect in SHM, with application to steel pipes and by using two computational algorithms. The first one was used to compensate the frequency shifts, which vary linearly depending on the frequency and temperature. The second one was used to compensate the amplitude shifts, which vary linearly according to the temperature. Both algorithms can be easily implemented in any SHM system, embedded or not. Lastly, the metric indices CCDM and RMSD were used for evaluating the damage detection on pipe structures. The method was successfully tested for compensating the temperature effect of two steel pipes, both real and simulated, for temperatures ranging from −40 °C to +80 °C and for a frequency range from 5 kHz to 120 kHz.
In conclusion, this work conducted a complete analytical, numerical, and experimental study on temperature variation in EMI-based SHM systems applied to pipelines. The study also presented an original and efficient approach based on linear interpolation to compensate the effect of temperature variations in practical applications. The proposed method presents low computational complexity and aims to use a minimum number of previously stored baselines. Even though the tests were performed in steel pipes, the proposed method can be used in any SHM system (EMI-based), provided that the structure presents impedance amplitude and frequency shifts with linear dependence, regardless the structure type. The results obtained for the pipe structures attested the feasibility of the proposed computational algorithm in increasing the precision of damage detection on structures under temperature-varying condition.
Despite the promising results, the need for future works remains to better monitor the structures under the temperature-varying conditions. In addition, the proposed compensation algorithm should be improved to address more effectively the temperature effect compensation in structures that present vertical and horizontal shifts with nonlinear temperature and frequency dependences. Therefore, to achieve this goal, the authors are working on a temperature compensation proposal that uses polynomial interpolation by means of simple equations and low computational load.

 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}