2. Data Model
Consider a ULA consisting of
M sensors with element spacing
d. Let
denote the wavelength of the carrier signal. Assume there are
Q far-field narrowband source signals impinging on the ULA. The arriving direction of the
qth signal is specified by
. Then, the steering vector of the ULA is
The signal received by the ULA array is given by the
vector
where
is the
steering matrix of the ULA with respect to the directions of the incoming source signals of
Q,
is the
source vector representing
Q source waveforms arriving at the ULA, and
is the
additive Gaussian noise vector.
In this paper, the superscripts T and H represent the transpose and conjugate transpose operations, respectively. For the (
2) model, three assumptions are introduced, which are considered to hold throughout the paper.
: The sources are zero-mean, stationary, and unrelated.
: The source is independent of the additive noise .
: is assumed to be stationary, zero-mean, and spatially white Gaussian.
Denote the gain-and-phase error of the
mth sensor with
and
, respectively. The received signal in the presence of gain-and-phase errors is
where
and
are diagonal matrices, and their
mth diagonal elements are
and
, respectively. Without loss of generality, we assume that
.
3. DOA Estimation Framework Based on Phase Retrieval
3.1. Gain Errors Estimation from Covariance Matrix
From (
3), the covariance matrix
can be expressed as
where
,
denotes the power of the
qth source,
denotes the power of the noise, and
is an
identity matrix.
The eigendecomposition of
is given as
where the eigenvalues
are arranged in descending order and
is the corresponding eigenvector. Then,
can be estimated as
Define the
mth diagonal element
of
. From (
4), we have
Recall that
, where the gain errors can be estimated as
3.2. Gain Errors Calibration
As the gain errors and noise power have been estimated, we are going to find a way to calibrate the gain errors. Since the information on arriving angle is included in the covariance matrix, it can be a feasible way to estimate the arriving angles from the covariance matrix, meaning that we need to eliminate the gain errors in this matrix.
As the noise power is estimated from (
6), we can remove the noise in the covariance matrix first:
Using the estimated gain errors from (
8), we can eliminate the gain errors by compensating for the covariance matrix:
where
. For the compensated covariance matrix
, we can find that the impact of gain errors and noise can be removed if they are correctly estimated. The next object is to eliminate the phase errors in the compensated covariance matrix,
.
3.3. A Simple Data Preprocessing Method
For the compensated covariance matrix
, we propose a new simple data preprocessing method in order to simplify the complexity of the problem. Define the
th element of
as
;
can then be expressed as (assume
)
Let
, and Equation (
11) can then be written as
Based on the Euler Theorem,
. Therefore, taking the magnitude squared of
, we obtain
It is easy to see that the magnitude information of
is independent of phase errors, but depends on the phase information related to the arriving angle
. This motivates the introduction of a DOA estimation approach based on the magnitude information of
. Taking the first column of
, we obtain an
vector
Then, taking the magnitude squared of
, we obtain
where
and the absolute value operator is applied element-wise to the vector
. The magnitude squared of the
nth column of
can be expressed as
where
and
denotes the
nth column of
.
Based on the following equation:
we have Lemma 1 about the magnitude squared of the elements in the compensated covariance matrix
.
Lemma 1. For any element in , there must be an equivalent element in . Therefore, we can say that contains all the magnitude information of .
Proof. The elements in
are given as
, and the elements in
are expressed as
. Because
, the lemma can be proved by (
16). □
Note that contains all the magnitude information of , and we can use , only a column of , to form the phase retrieval problem in order to reduce the computational cost. Therefore, we only use one column of without missing the magnitude information. The simple data preprocessing method for the compensated covariance matrix helps us to reduce the redundancy of the matrix and form the phase retrieval problem easily.
3.4. A New Way to Eliminate the Phase Errors
can be written as
where
, and
can be regarded as a new phase error matrix:
. In order to convert the DOA estimating problem into a nonlinear optimization in a sparse framework, we assume the source’s possible DOAs comply with a grid of
S points, with
. Consider the estimation error for the gain errors and noise power, where (
17) can be revised as
where
is defined as an
sparse vector that only has
Q non-zero elements representing source powers, and
is defined as a
dictionary matrix with a
sth column:
where
refers to a possible DOA. Our goal is to determine the
Q non-zero elements of
from the knowledge of
and
. The support of the sparse vector
has a one-to-one relation with the
Q arriving angles
. Based on
, we can obtain
Therefore, we have converted the DOA estimation problem into a phase retrieval problem [
13]. The rows of
can be regarded as the known measurement vectors. We can now propose estimating the support of
from
and
, and we can find that the phase errors are totally removed in (
21) by taking the magnitude squared of the elements in
.
3.5. Phase Ambiguities Solution
However, the phase ambiguity problem associated with phase retrieval solutions should be considered in the DOA estimation. It is significant to resolve the phase ambiguity problem to get a unique solution.
Consider the scenario of two sources, assume the compensated covariance matrix is approximated correctly, and let
, where
can be written as:
Assume the source power is known, and the arriving angle can be estimated from Equation (
22). To simplify the phase ambiguity problem, let
,
. Equation (
22) then becomes
The solution
to (
23) is subject to phase ambiguities, which consist of phase shift ambiguity and phase mirroring ambiguity. The phase shift ambiguity refers to the case that there exists an arbitrary
,
. The phase mirroring ambiguity originates from the fact that
and
can be the two solutions to (
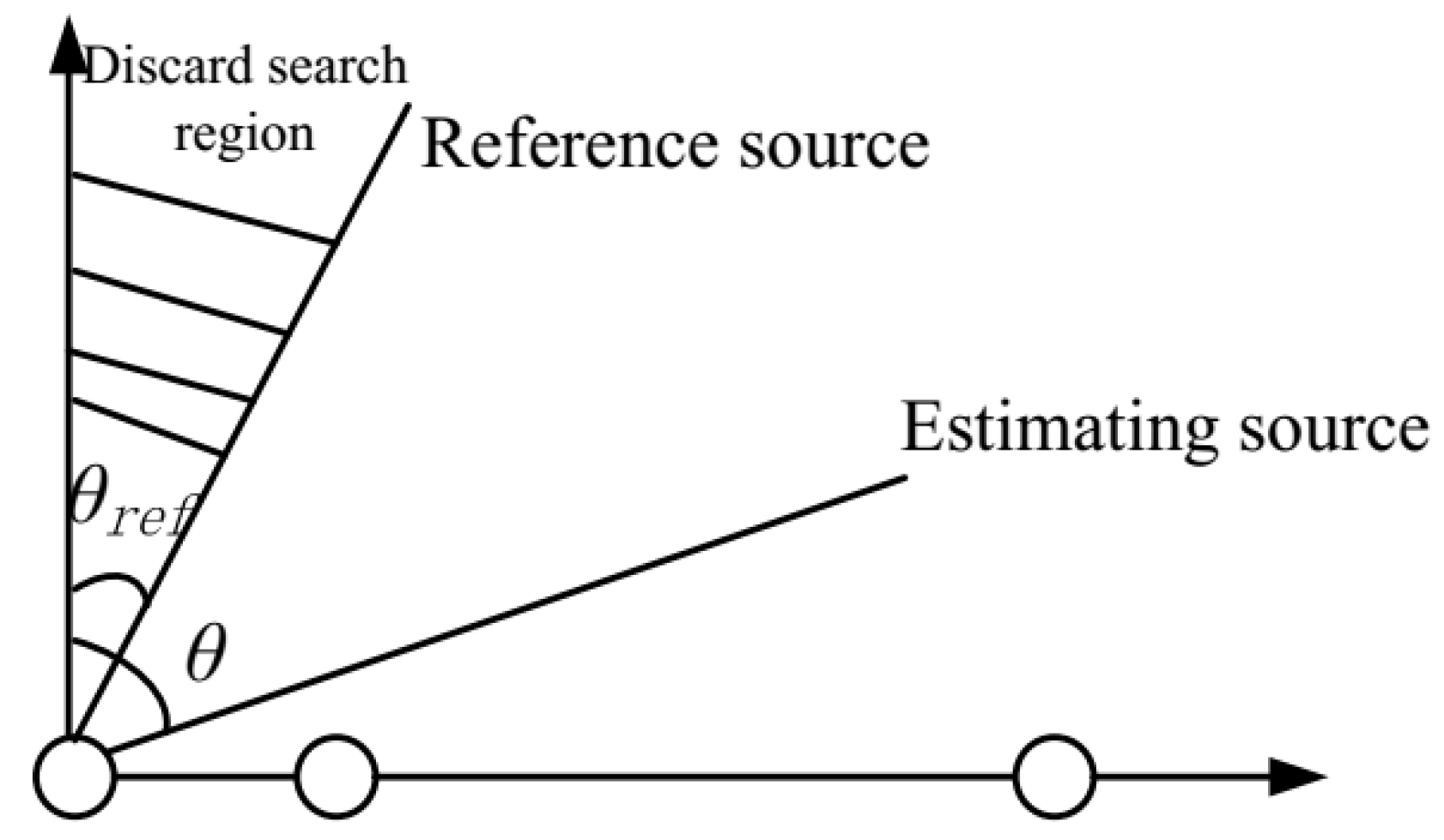
23). The phase ambiguity can be removed by placing known reference sources, where the DOA of a source can be estimated unambiguously if the source is restricted to only one side of the reference source. For example, if the DOA of the reference source is set at
rad, the estimating DOA can be estimated unambiguously if it is restricted to the region
. As depicted in
Figure 1, the angle ambiguities problem can be solved after a reference target is placed at the cost of a small loss in the visible region. For the multiple-sources DOA estimation problem, the ambiguity can be removed by setting multiple reference sources.
3.6. DOA Estimation Using Sparse Least-Square Feasible Point Pursuit (LS-FFP) Approach
Based on (
21), the DOA estimation problem can be considered as the optimization problem
Let
denote the
mth row of
, where (
24) can be recast as
where
and (
22) can be recognized as the least-squares (LS) formulation for phase retrieval. To solve (
25), we use the sparse Least-Square Feasible Point Pursuit (LS-FFP) algorithm, a phase retrieval algorithm that exploits sparsity [
28]. Firstly, (
25) is recast in the following equivalent form:
where
, and the equality constraints in (
26) are rewritten as
It is clear that (
28) is a non-convex constraint. In order to transform the optimization problem into a convex one, following the principles in [
29], (
28) can be replaced by
where
is an
random vector, and
is a slack variable. We thus obtained the following convex, quadratically constrained quadratic programming (QCQP) by:
where
, and
trades off the original objective function and the slack penalty term. For sparse LS-FFP, we have:
where
-norm
is an ideal description of sparsity, and
balances the objective function and the sparsity of
.
As indicated in
Section 3.5, reference sources should be added to resolve the ambiguity problem. In this paper, the sources are random variables distributed according to the standard Gaussian distribution, so the average power of each source is 1. For the scenario of the single-source DOA estimation, a reference source is set at
, and the estimating source is coming from
rad. The
dictionary matrix is
, and
. Thus, we modified (
31) to the following optimization problem by adding two constraints,
where
denotes the power of the
sth source, and
describes the reference source with direction-of-arrival (DOA)
rad. Using the convex optimization toolbox convex (CVX) [
30], we were able to solve the convex quadratically constrained quadratic programming (QCQP) (
32) in MATLAB.
LS-FPP is an iterative algorithm starting with a random initial
vector
. In the
kth iteration, we solve (
32) to obtain
, then setting
. Since the optimal value of the cost function in each iteration step is non-increasing [
28], the iteration stops until the difference of the optimal value between two adjacent iterations is less than a given threshold. As
is estimated, the DOA estimates can be obtained by seeking the peaks of
.
Consequently, the proposed approach for DOA estimation is summarized as follows:
Step 1: Estimate the covariance matrix with L snapshots
Step 2: Estimate the noise power and gain errors by (
6) and (
8).
Step 3: Calculate the compensated covariance matrix
as (
10).
Step 4: Take the first column of
and construct the data model as (
18).
Step 5: Use the sparse LS-FPP approach to solve the convex QCQP (
32) and obtain
.
Step 6: Obtain DOA estimates by seeking the peaks of .
3.7. Computational Complexity
Computational complexity of the proposed DOA estimation framework lies in three parts: gain errors estimation, compensated covariance matrix construction, and DOA estimation using the Sparse LS-FFP approach. For the gain errors estimation part, the computational complexity is
, which comes from the covariance matrix calculation and eigenvalue decomposition of the covariance matrix. For the compensated covariance matrix construction part, the computational complexity is
, which comes from Equation (
10). For the part where the DOA estimation was done using the Sparse LS-FFP approach, the computational complexity mainly comes from solving the optimization problem (
32), which is
. Assuming the maximum iteration is
, the complexity of the part where DOA estimation is done using the Sparse LS-FFP approach is
.
The computational complexity of Kim’s approach is
. For the approach in [
15], it cost
.
Figure 2 shows the computational complexity comparison of the proposed approach and other existing approaches. The maximum iteration is assumed to be
and
. It can be seen that the proposed approach requires more computational complexity to improve performance.
4. Numerical Simulations
In this section, numerical simulations are run to demonstrate the performance of the proposed DOA estimation approach. All the simulations are based on a ULA with
sensors, and the sensor spacing
. The number of snapshot is
. Let
rad, so a grid of
points is uniformly spaced over the
rad. A reference source of the known DOA is set at
rad, and the estimating source is located at
rad. We also evaluated the performance of the proposed approach for the multiple sources estimation, where two known reference sources were set at
rad and
rad, and the estimating sources are located at
rad and
rad. The input signal-to-noise ratio (SNR) of the
qth signal is defined as
. The gain-and-phase errors were generated by the following formulas, respectively:
where
and
are uniform random variables in interval
,
, and
are the standard deviations of gain-and-phase errors, respectively. To compare with Kim’s approach, we used the probability of error to evaluate the performance. The probability of error is defined as the ratio of incorrectly estimated DOAs to 100 simulations. Moreover, we compare this with a state-of-the-art sparse DOA estimation approach proposed by Zhao et al. [
15].
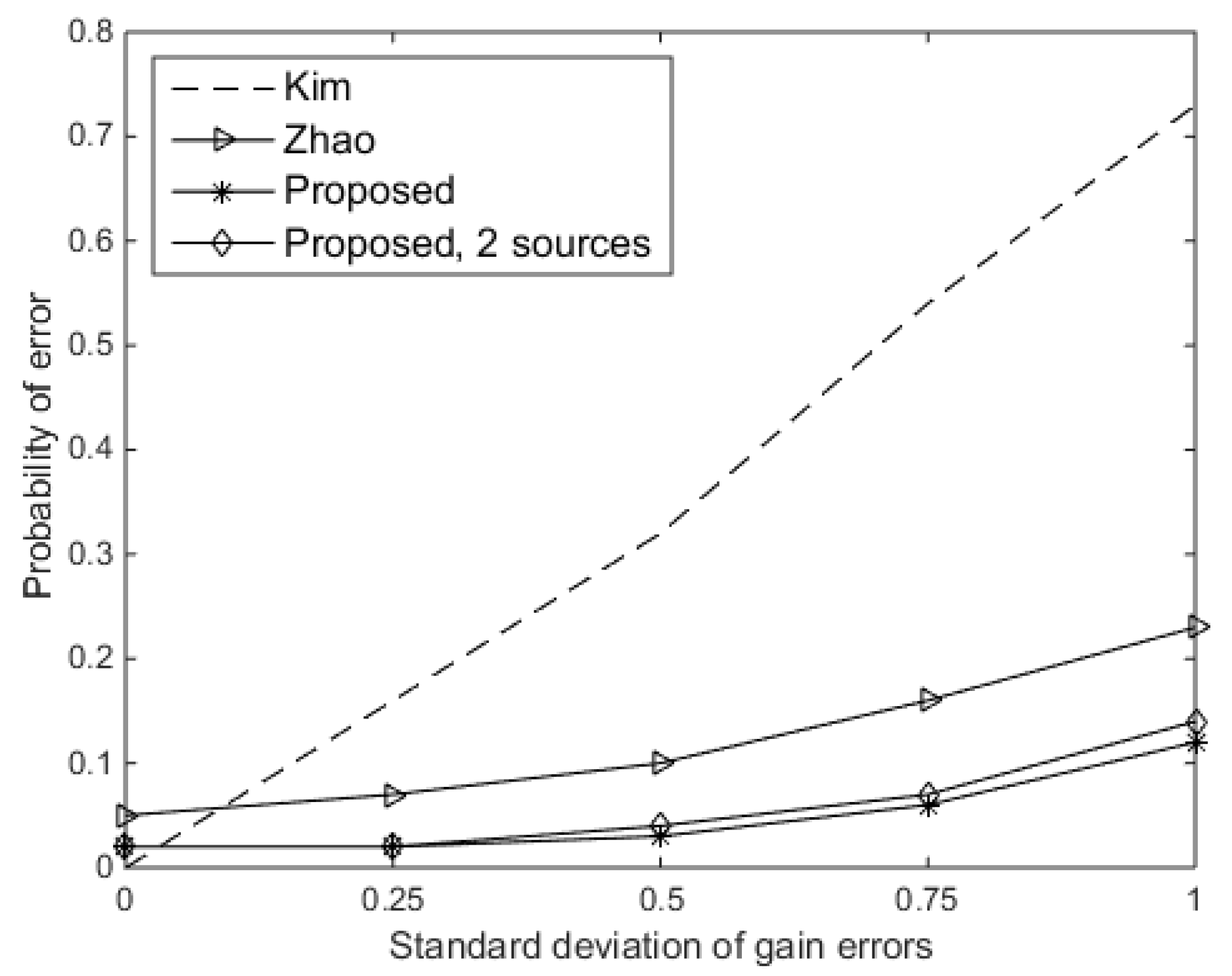
Firstly, we compared the probability of error of the DOA estimation versus the standard deviation of gain errors (
) for the existing approaches and the proposed approach of one or two sources. Here, the SNR was set at 10 dB, and the standard deviation of phase errors (
) was assumed to be
rad. As shown in
Figure 3, the performance of Kim’s approach noticeably began to deteriorate as
increased. For the proposed approach, it has a probability of error lower than 0.1 for
. Therefore, the proposed approach performs more robustly than Kim’s approach for a wide range of
. The proposed approach performs slightly better than Zhao’s approach; however, Kim’s approach is better when the gain errors do not exist. In the next two experiments, the standard deviation of gain errors is set at 0.5, and Kim’s approach is not considered in the next experiments because it is not suitable when the gain errors exist, as we can know from
Figure 3.
Then, we evaluated the probability of error of the DOA estimation versus SNR for the proposed approach of one or two sources. The standard deviation of phase errors (
) was assumed to be
rad, and the standard deviation of gain errors (
) was set at 0.5. From
Figure 4, it was shown that the probability of error of the proposed approach is lower than 0.1 for all SNRs. The proposed approach was shown to provide better performance than Zhao’s approach. It is remarkable that the proposed approach is robust to noise.
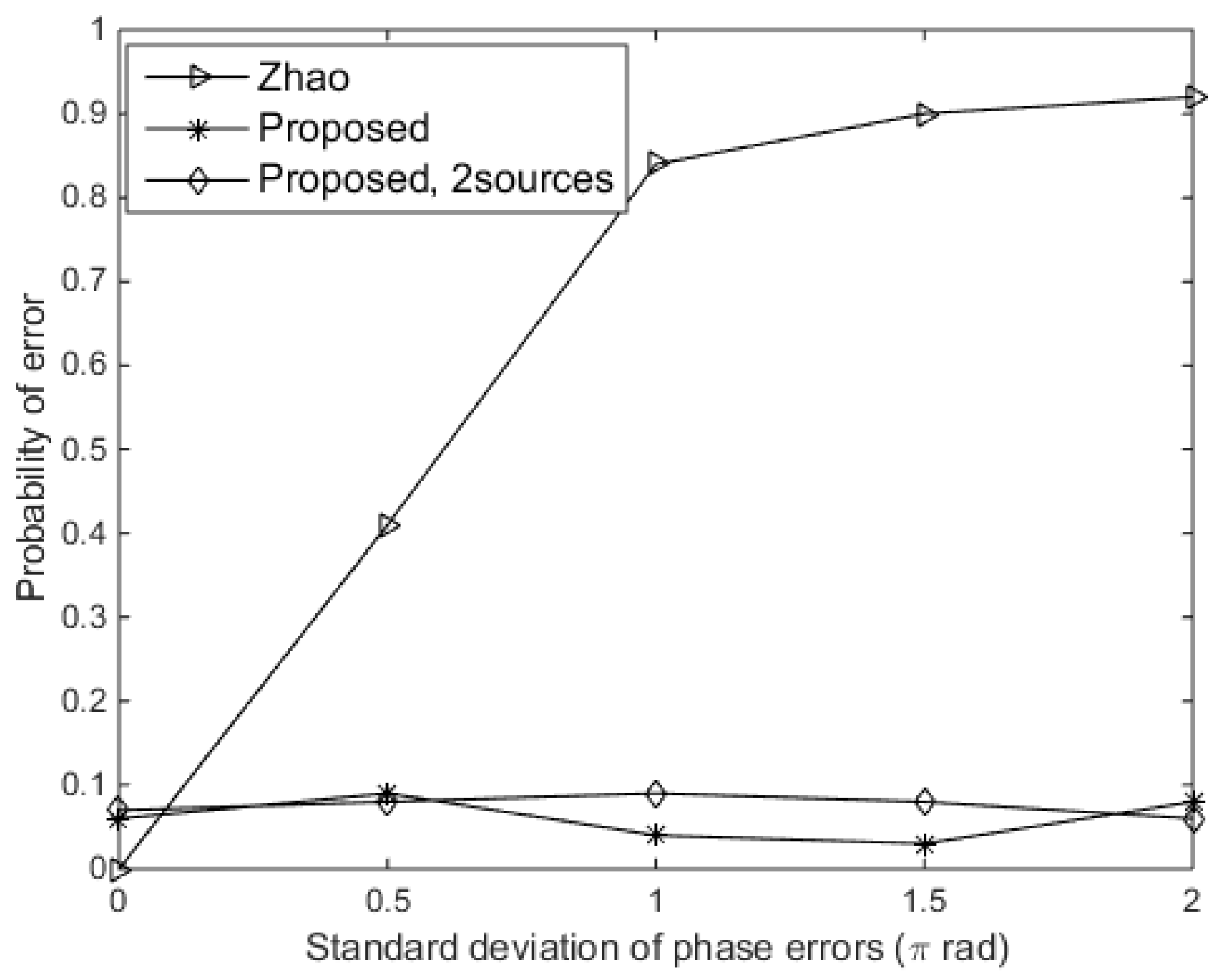
To demonstrate the effect of phase errors on DOA estimation, we evaluated the probability of error of the DOA estimation for the proposed approach with respect to the standard deviation of phase errors from 0 rad to
rad. Here, the standard deviation of gain errors (
) was set at 0.5, and the SNR was 10 dB.
Figure 5 shows that the probability of error of the proposed approach is lower than 0.1 as the standard deviation of phase errors varies. However, the performance of Zhao’s approach becomes degraded when
rad. Zhao’s approach was based on the assumption that the array errors are small [
15], and it is indicated that the phase errors have no effect on the proposed approach, which is a key benefit based on phase retrieval.
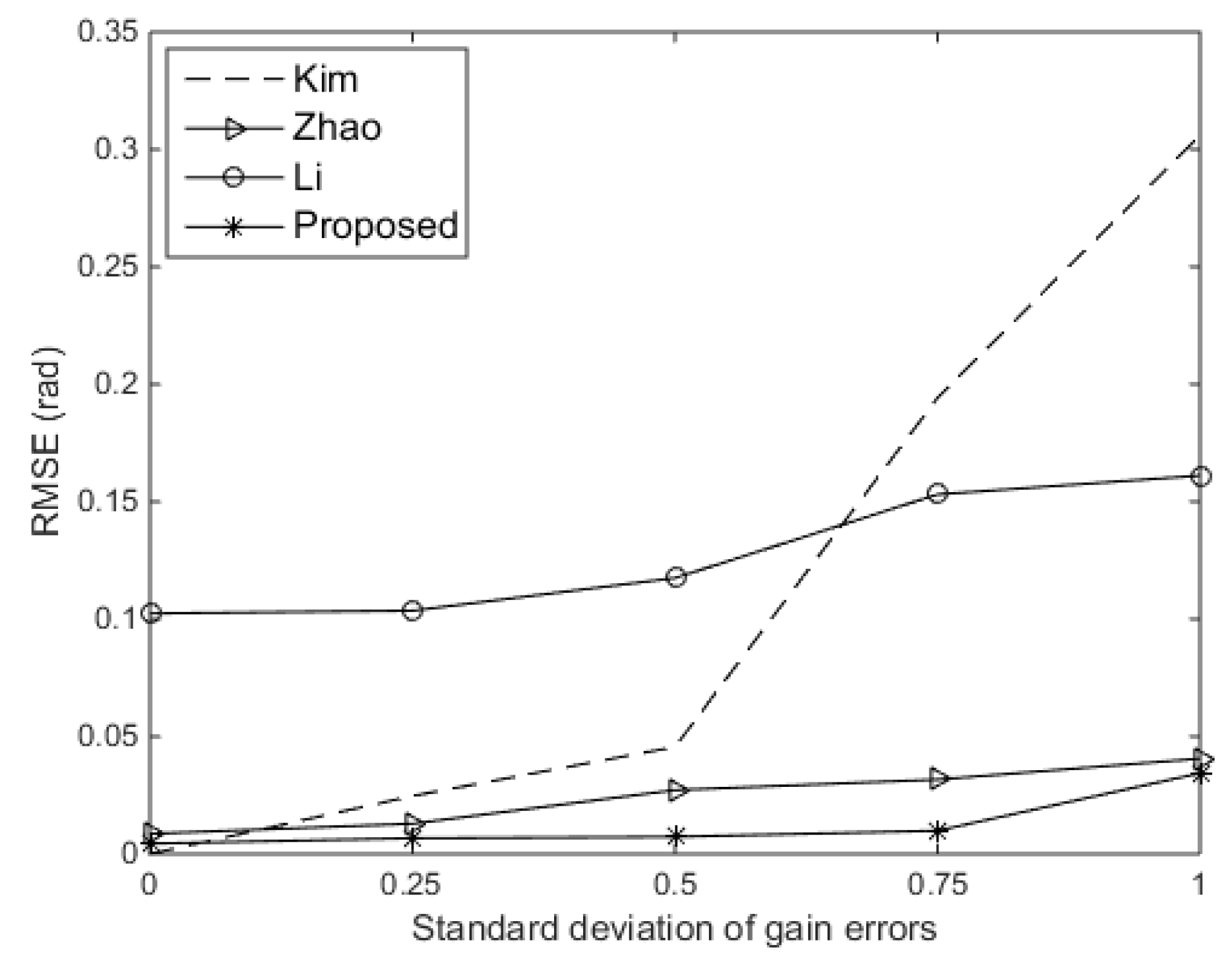
In order to explore the results better, we also evaluated the root mean square error (RMSE) on the DOA estimates. We compared the RMSE of the DOA estimates versus the standard deviation of gain errors for the existing approaches and the proposed approach. The SNR was set at 10 dB, and the standard deviation of phase errors was assumed to be
rad. We also compared with another existing techniques in [
13]. As shown in
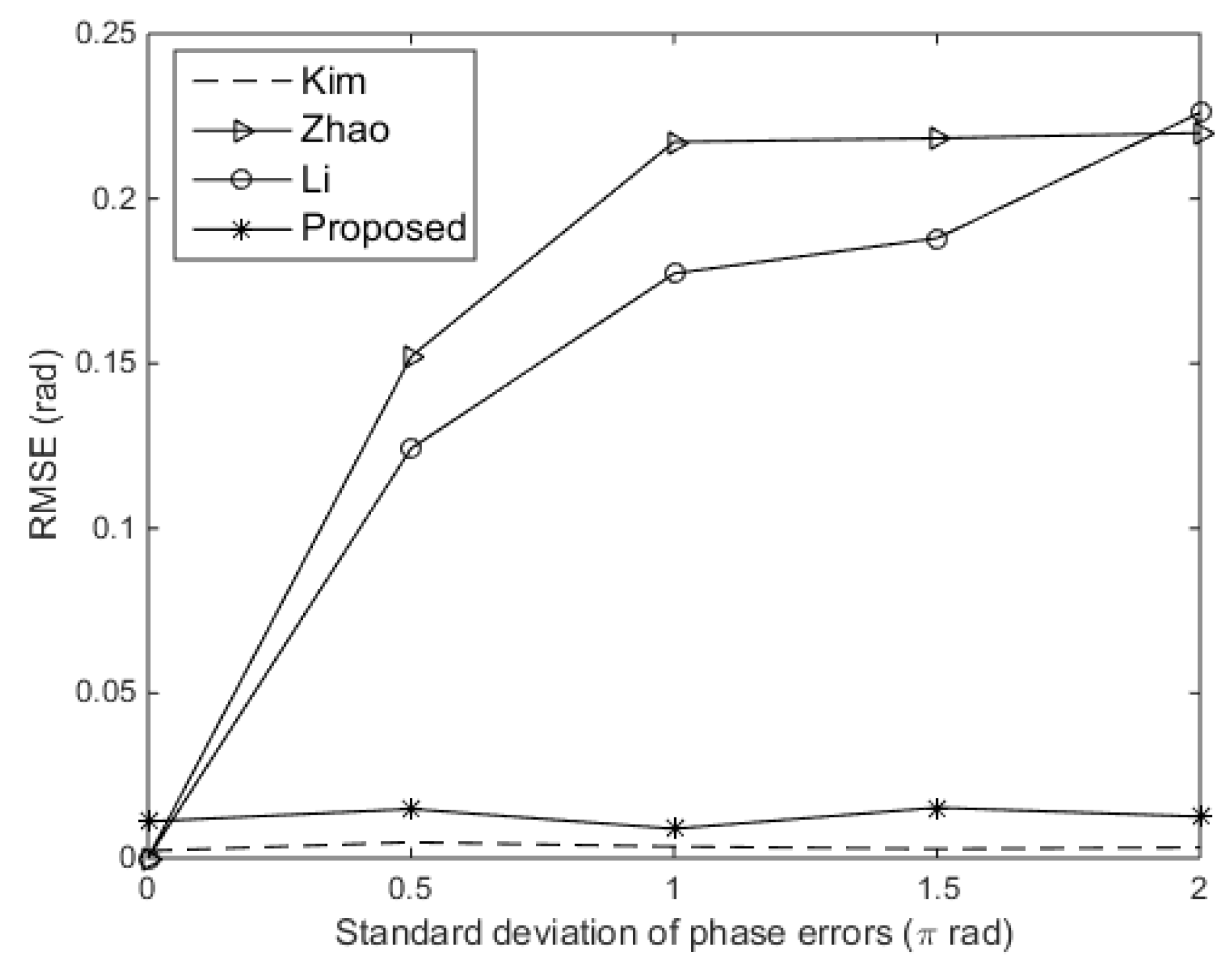
Figure 6, the proposed approach performs better than other existing approaches. Then, we compared the RMSE of the DOA estimates versus the standard deviation of gain errors for the existing approaches and the proposed approach. The SNR was set at 10 dB, and the standard deviation of gain errors was set at 0.15. Shown in
Figure 7, we can see that the proposed approach and Kim’s approach perform independently of phase errors. Kim’s approach even performs slightly better than the proposed approach, because the standard deviation of gain errors is relatively small in this experiment. However, Zhao’s approach and Li’s approach perform badly when the standard deviation of phase errors rise to
rad.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}