Development of a Bendable Outsole Biaxial Ground Reaction Force Measurement System

Abstract
:1. Introduction
2. Methods and Materials
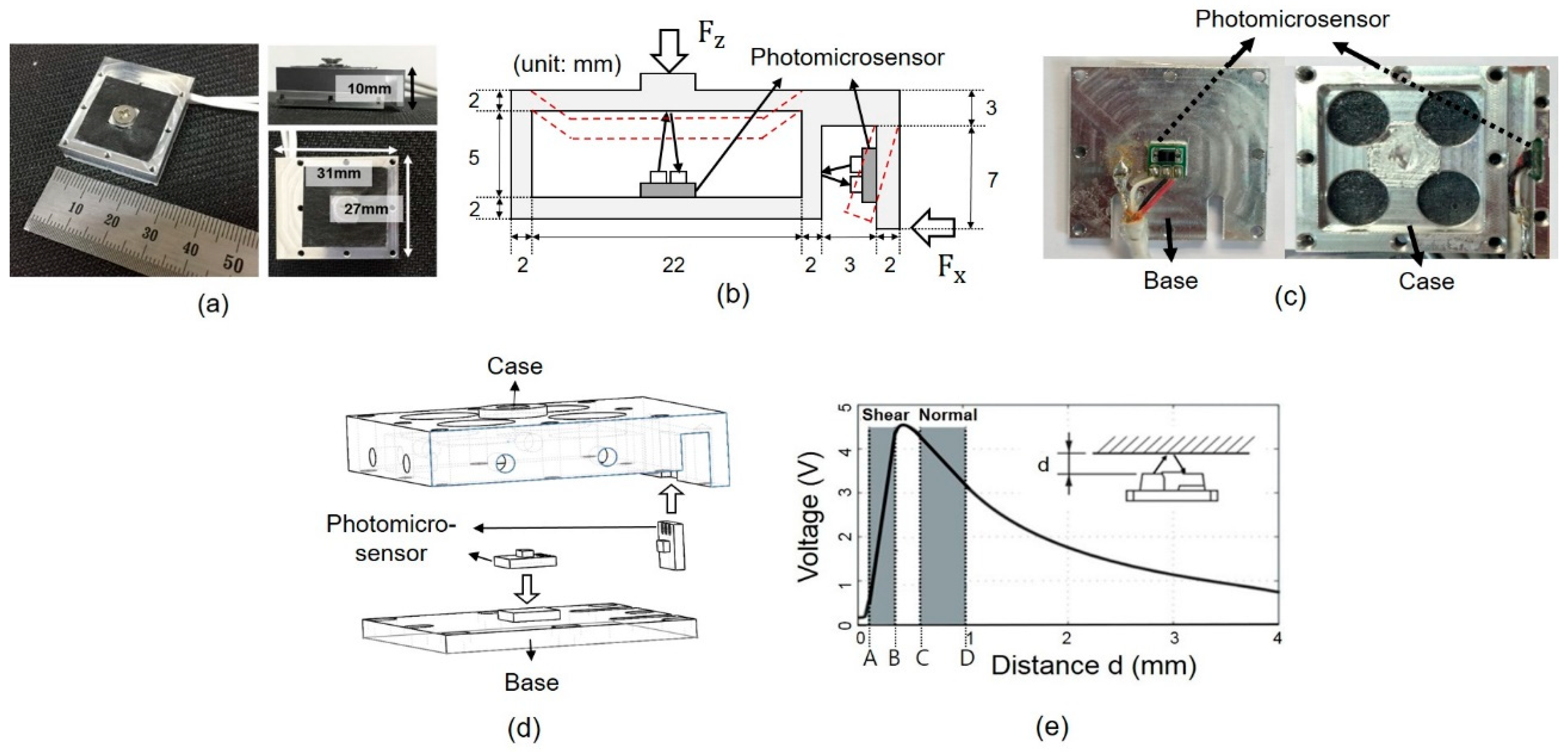
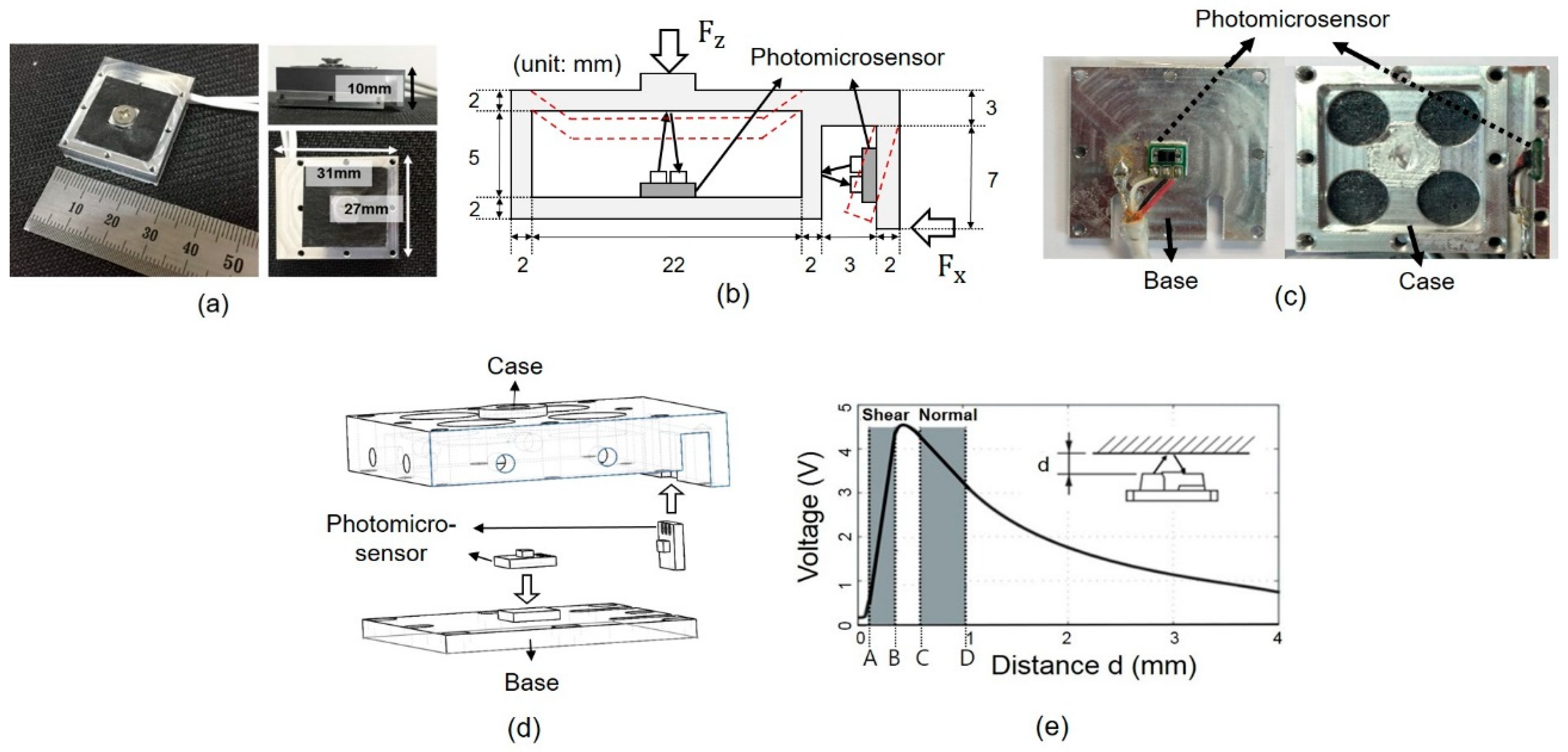
2.1. Biaxial Force Sensor Design
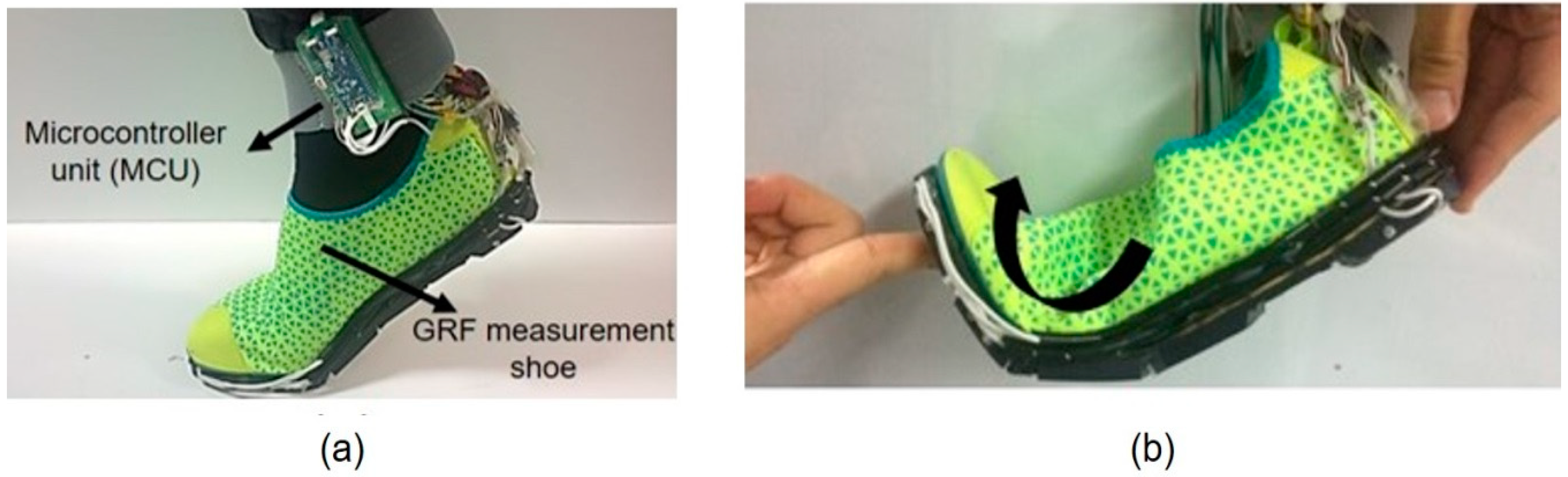
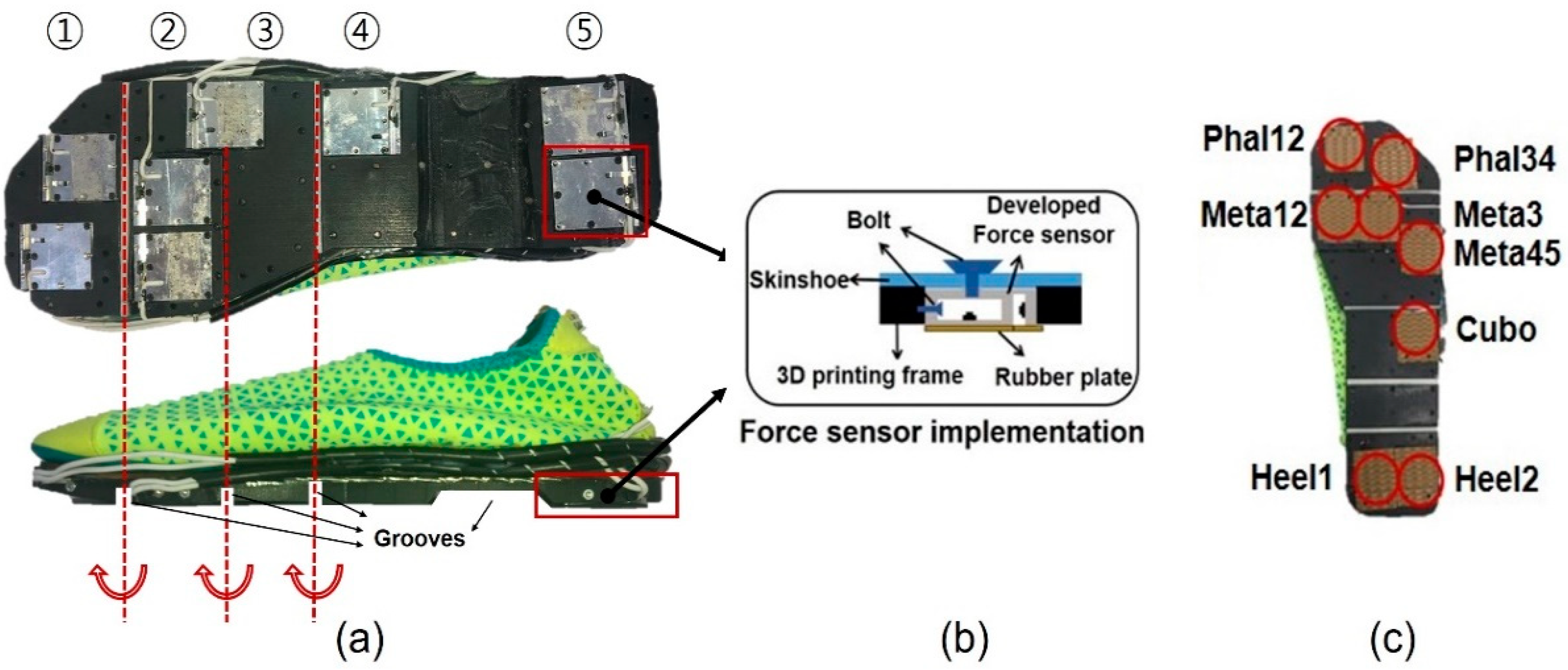
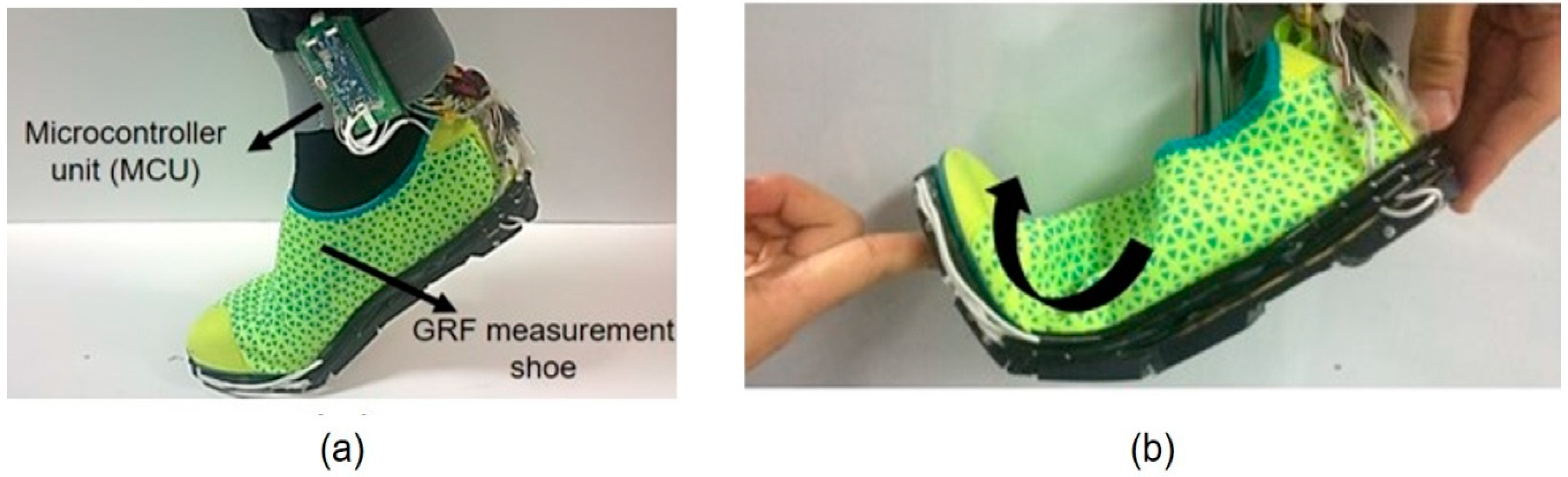
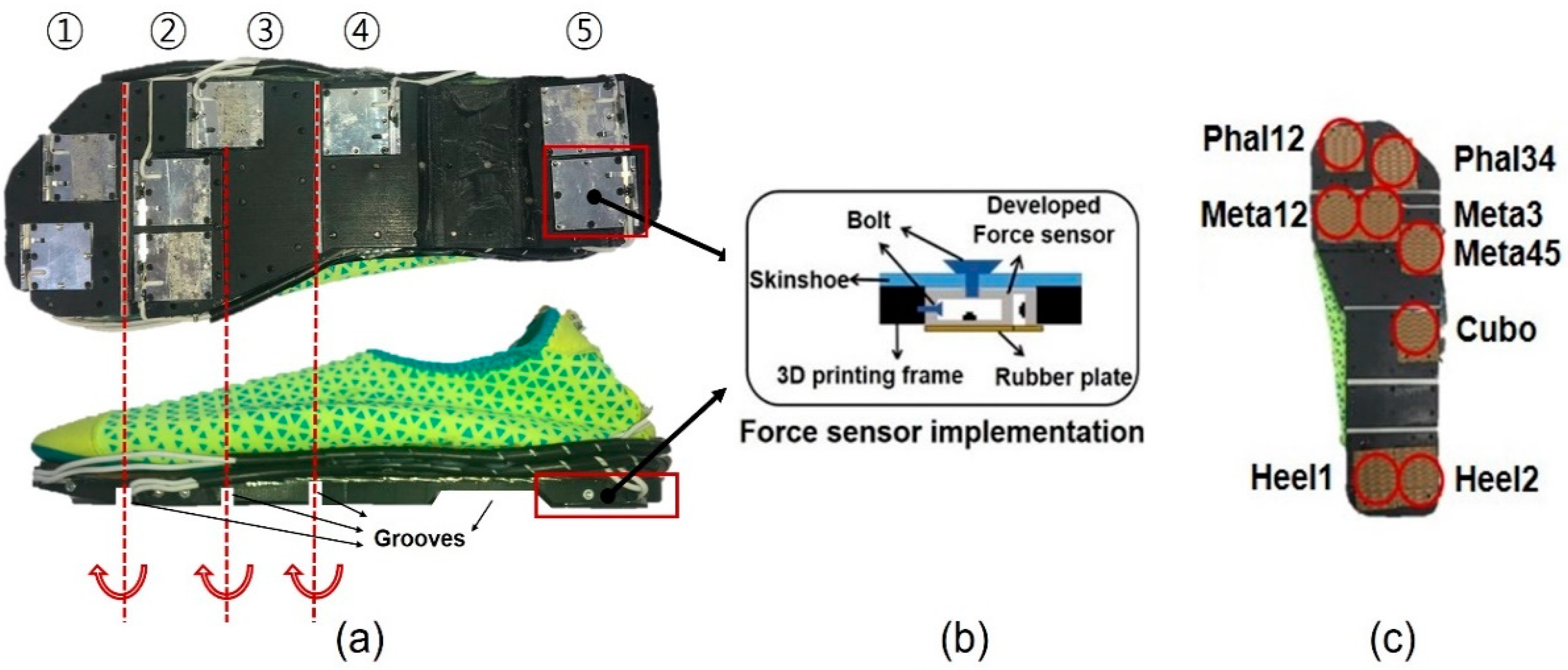
2.2. GRF Measurement System Design
3. Experiment Results and Discussion
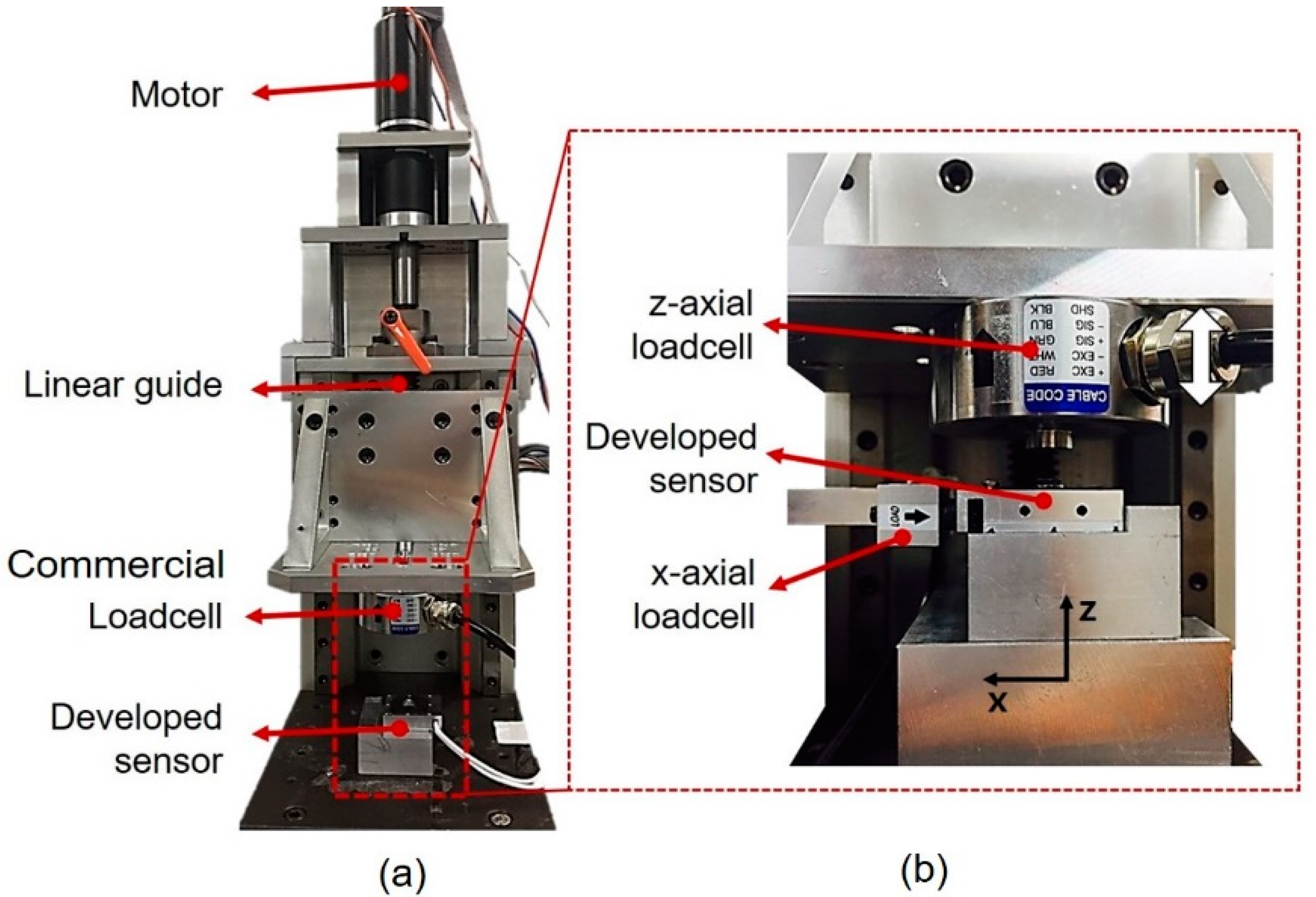
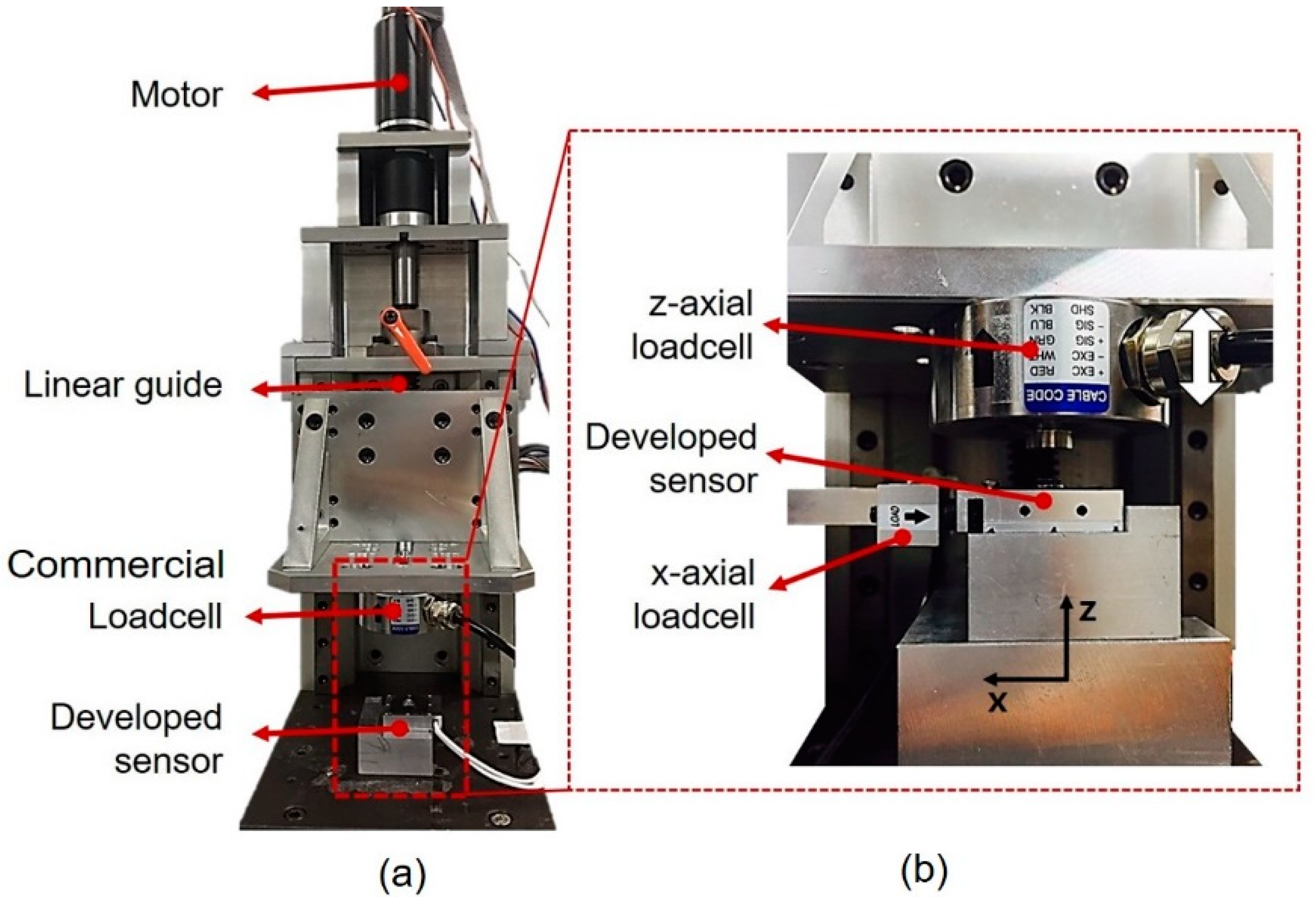
3.1. Experiments for Biaxial Force Sensor
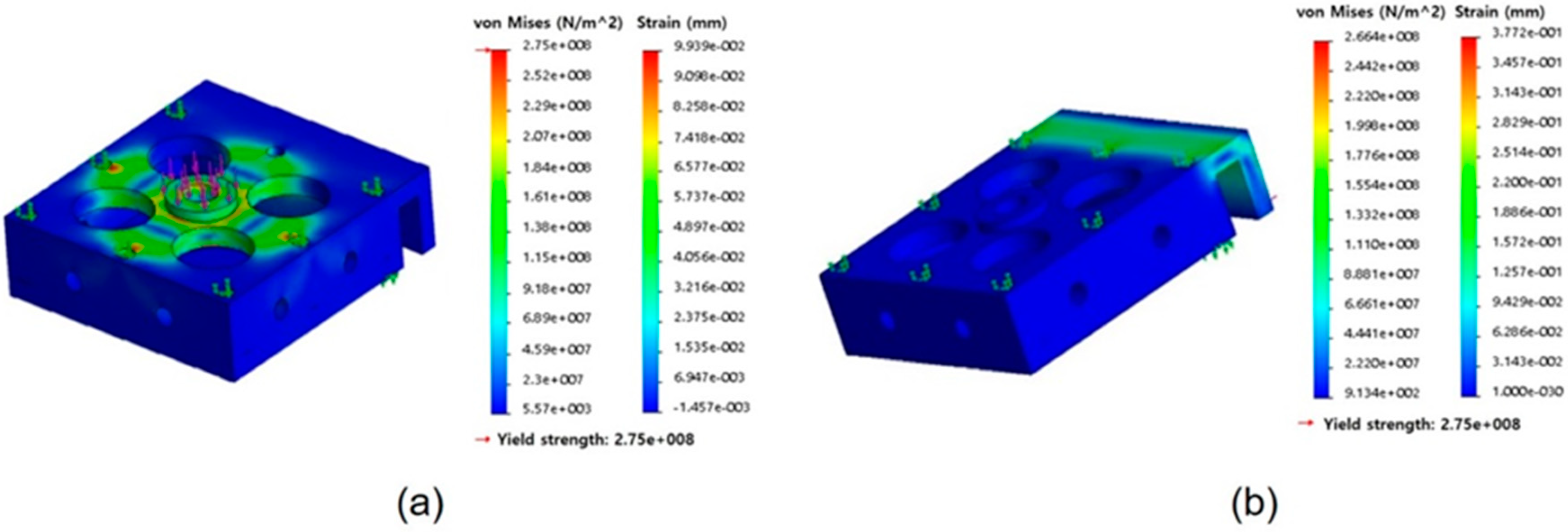
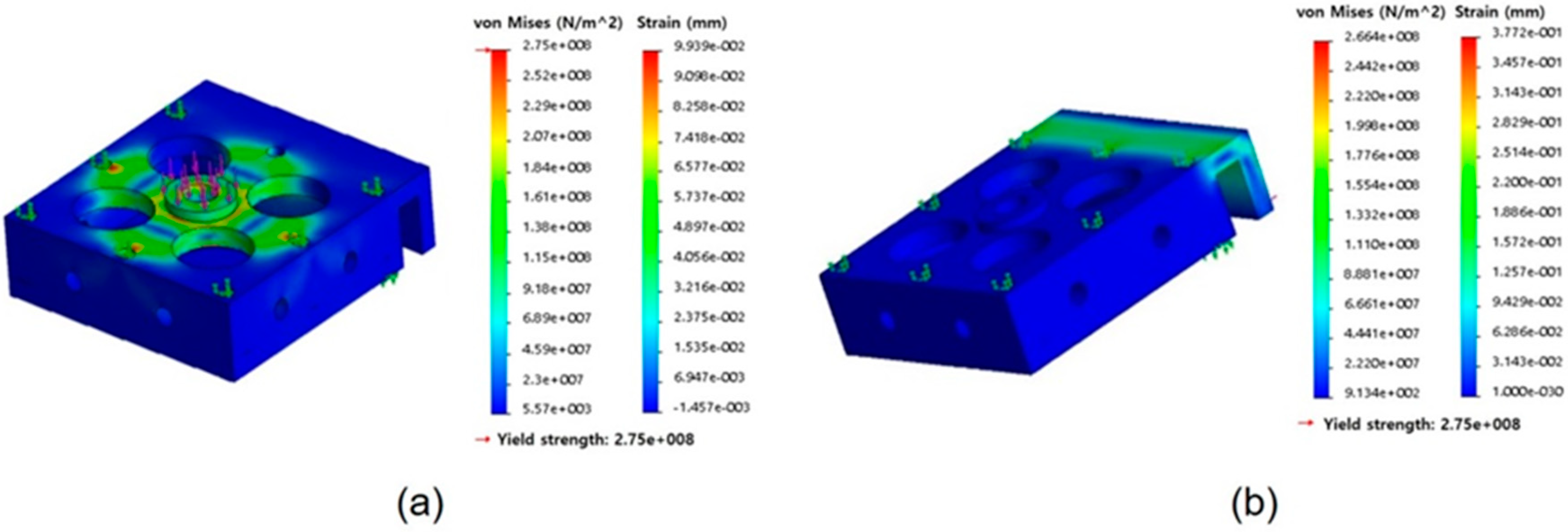
3.1.1. Finite Element (FE) Analysis
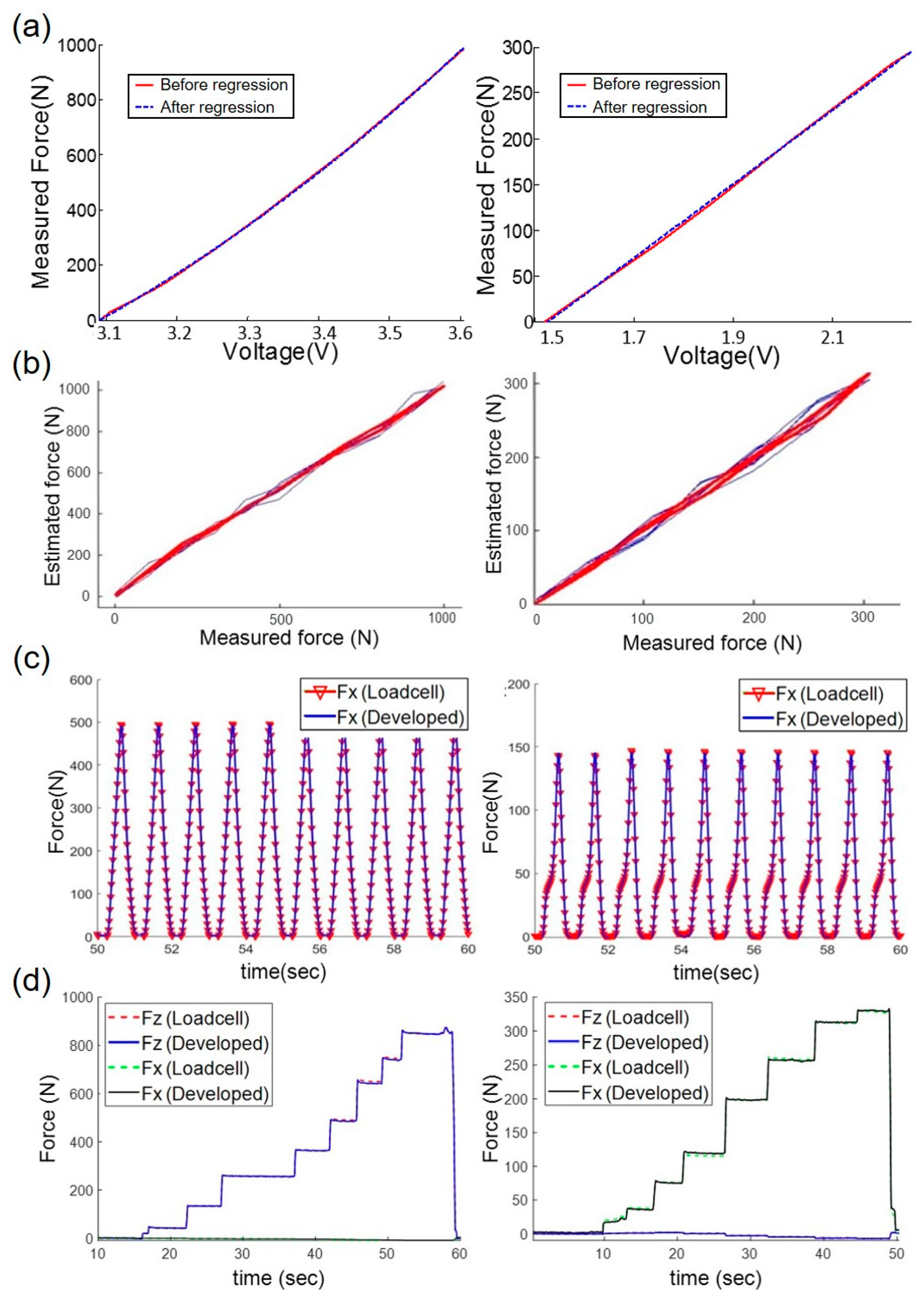
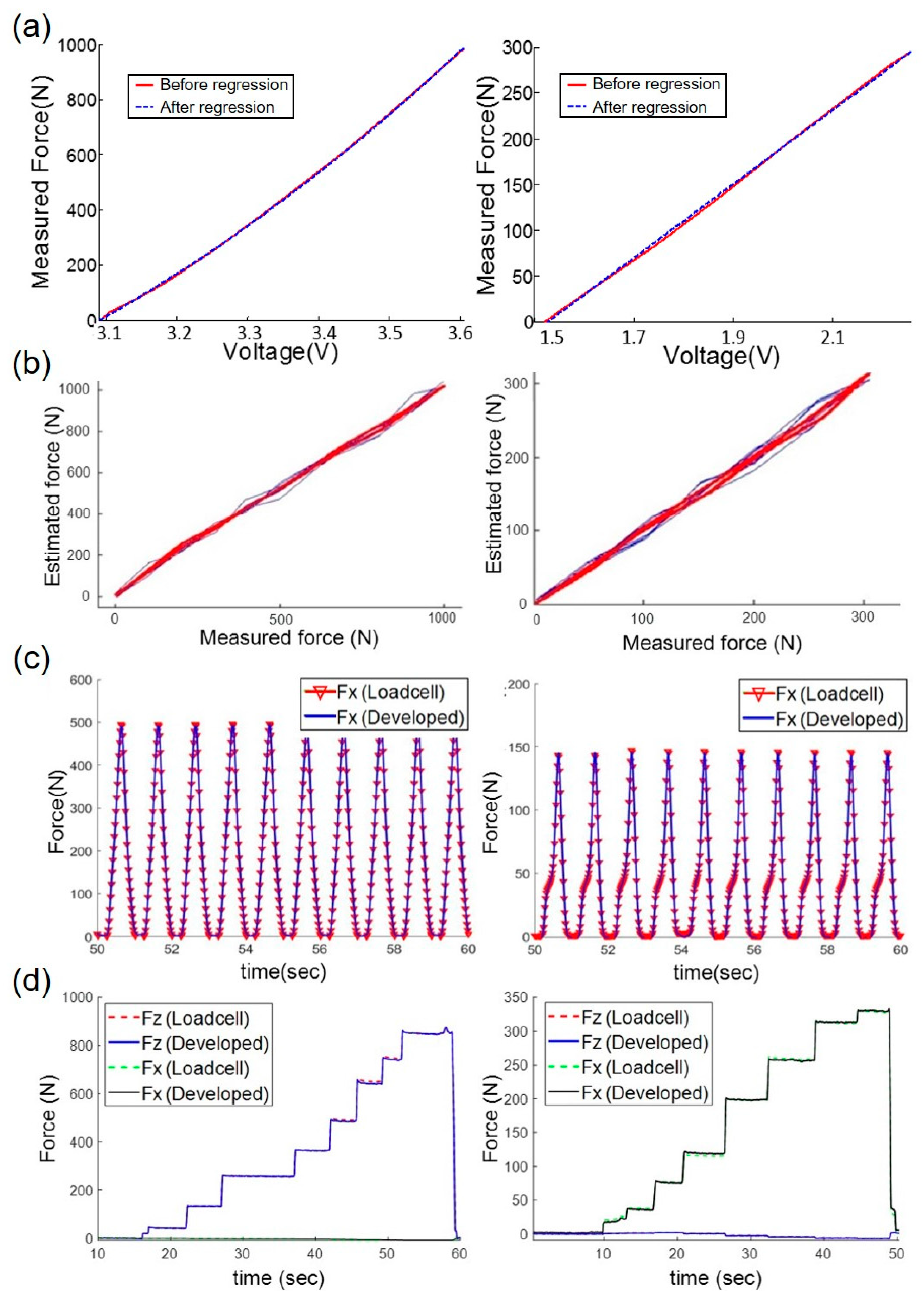
3.1.2. Sensor Characteristics
3.2. Experiments for GRF Measurement System
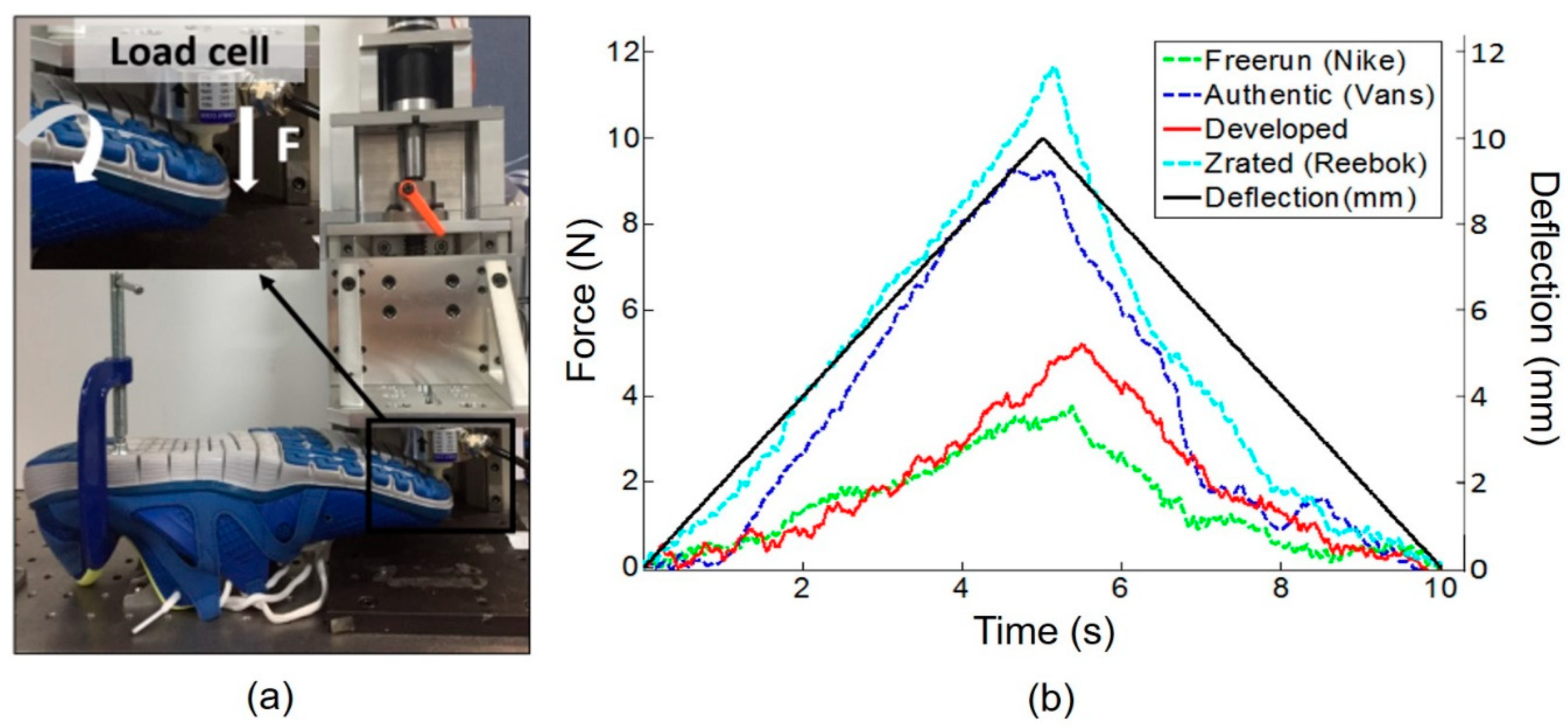
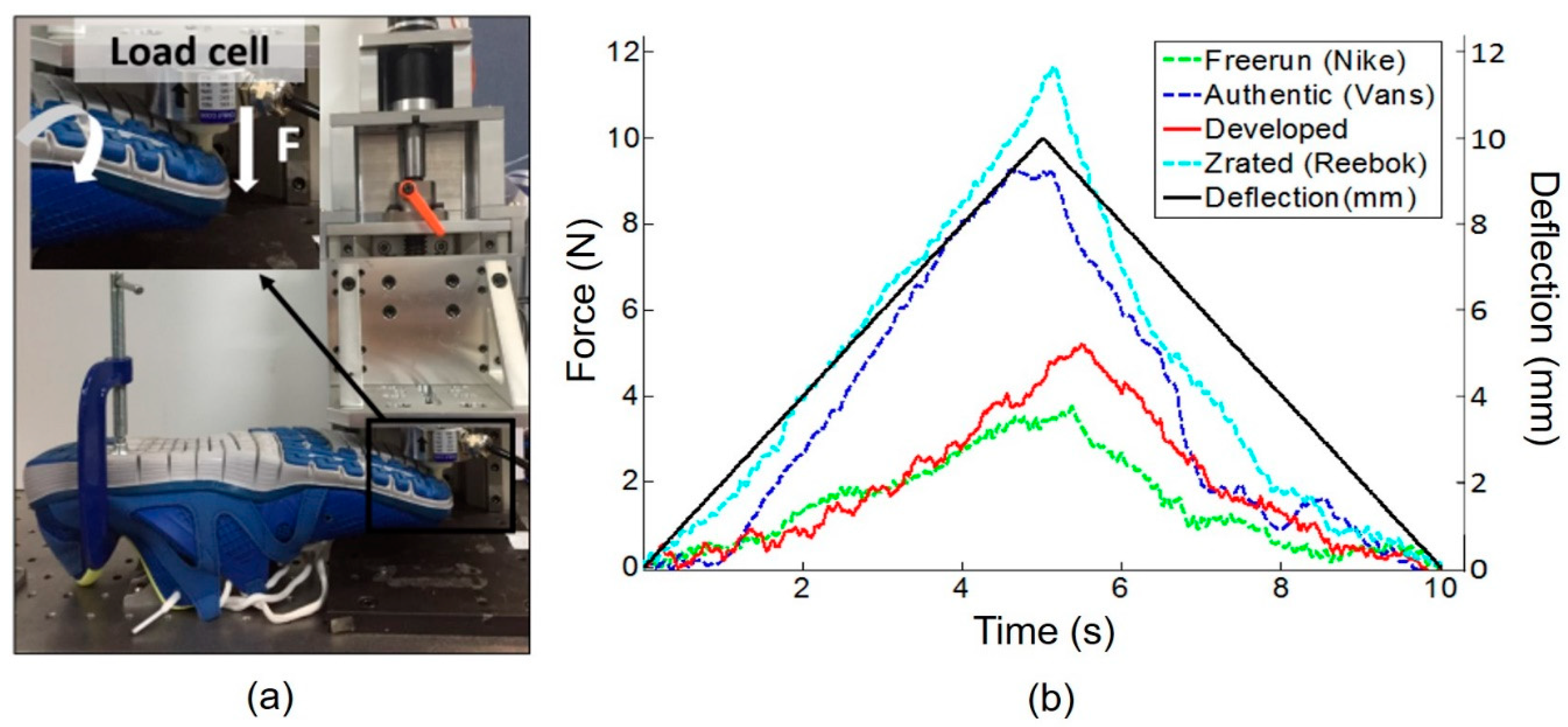
3.2.1. Forefooot Bending Stiffness Test
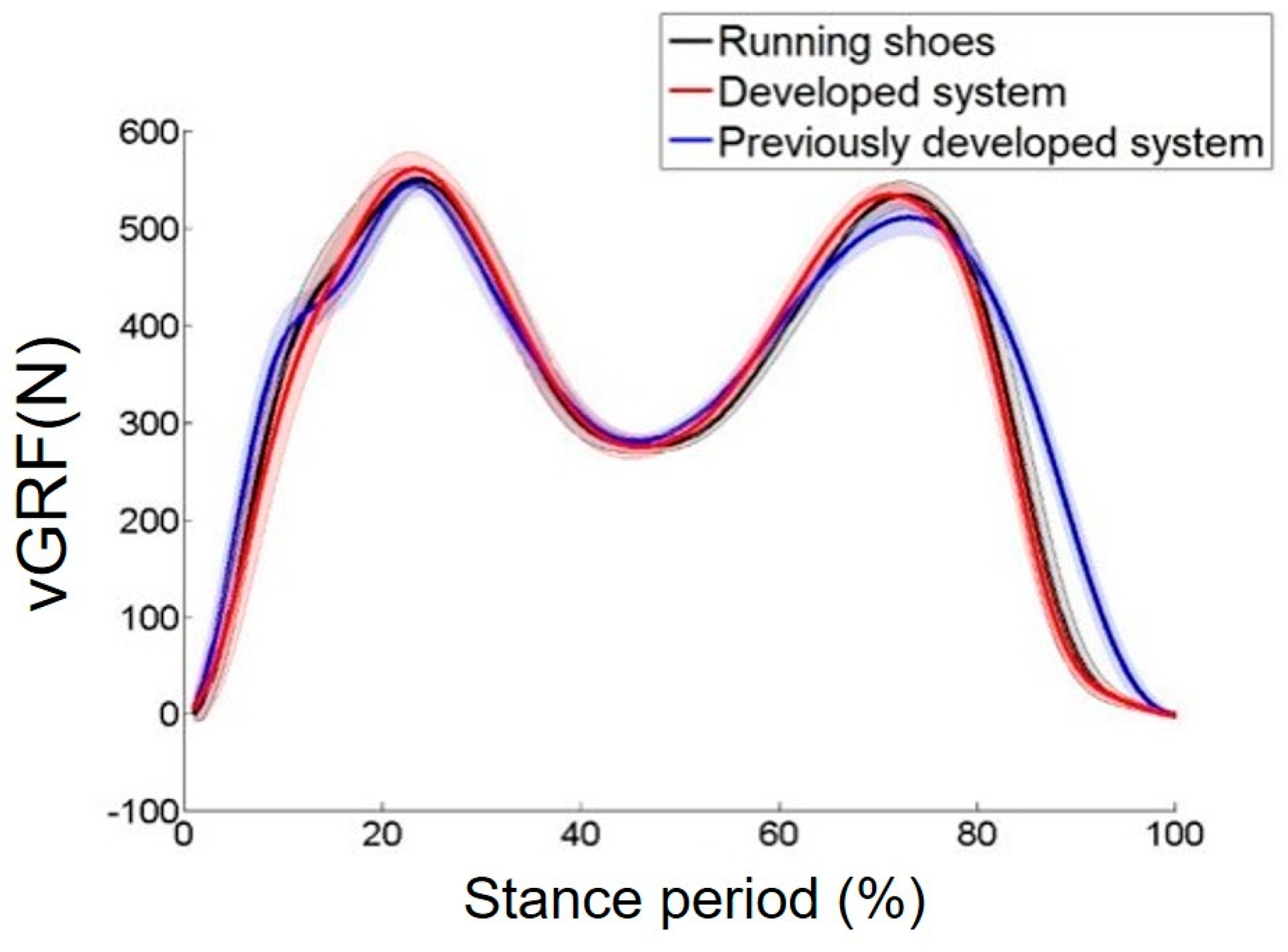
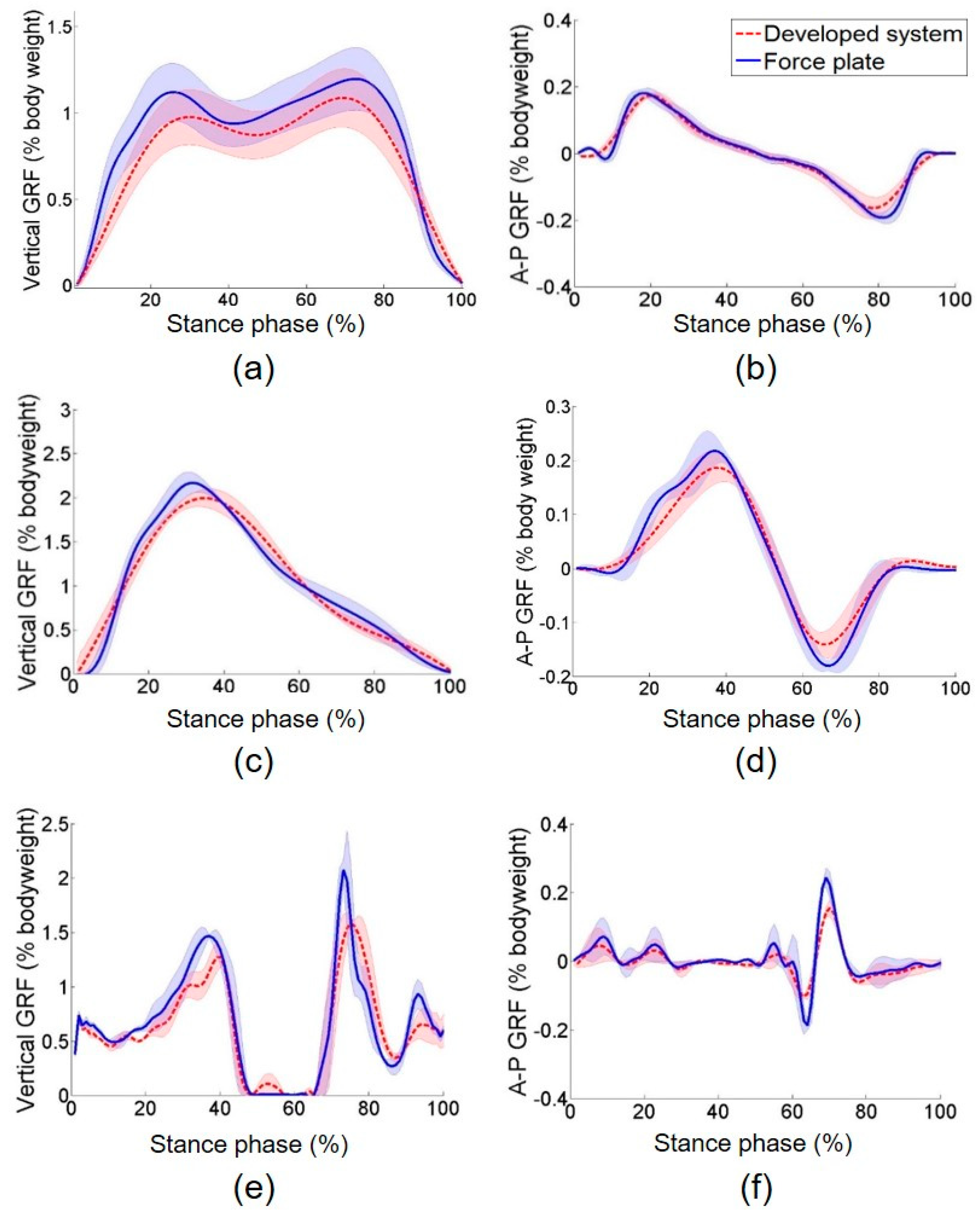
3.2.2. GRF Pattern Comparison with Other Outsole GRF Measurement Systems
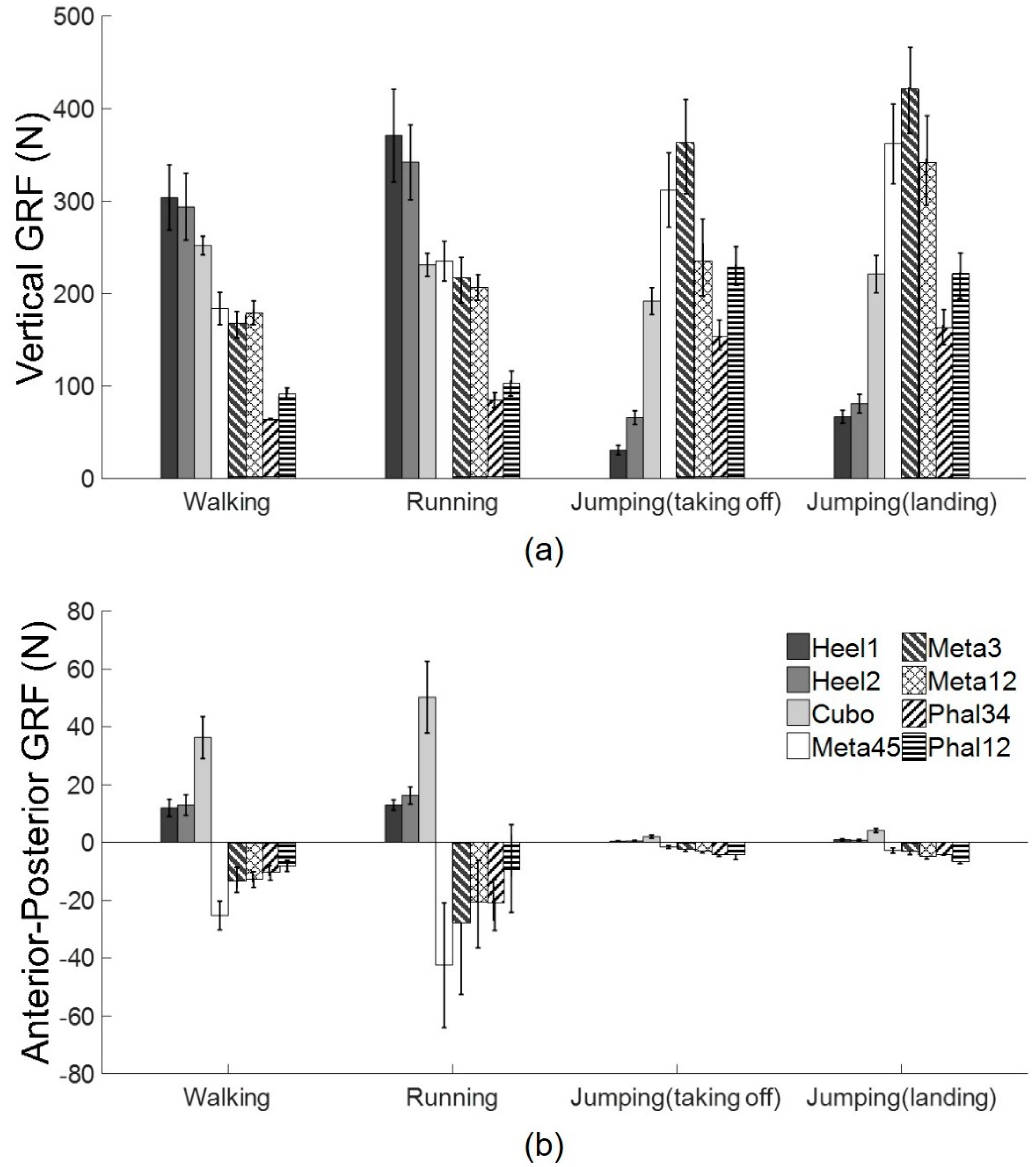
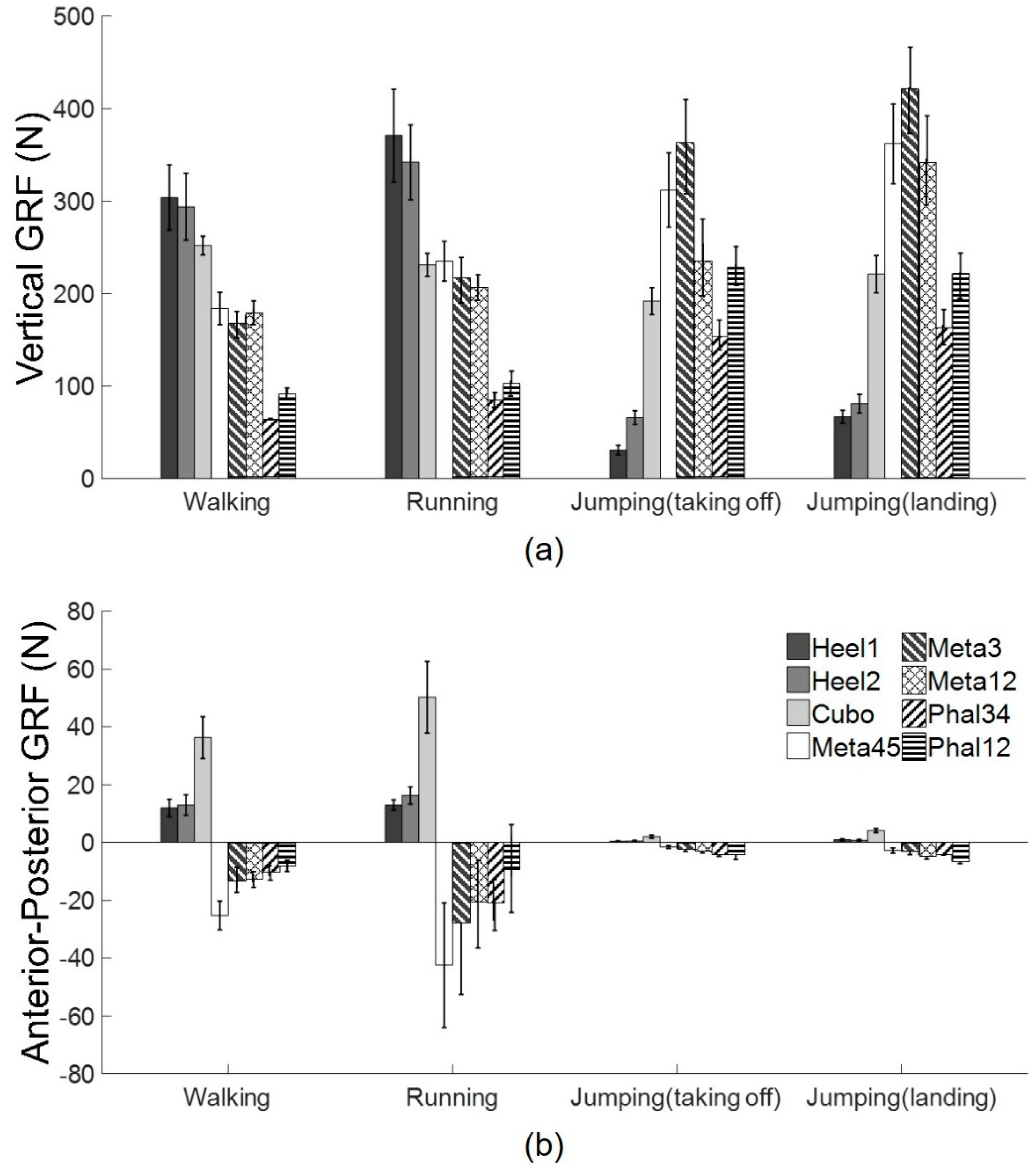
3.2.3. Walking, Running, and Jumping Experiments
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Perry, J. Gait Analysis; SLACK Inc.: Thorofare, NJ, USA, 1992. [Google Scholar]
- Kim, J.; Park, H.S.; Damiano, D.L. An interactive treadmill under a novel control scheme for simulating overground walking by reducing anomalous force. IEEE/ASME Trans. Mechatron. 2015, 20, 1491–1496. [Google Scholar] [CrossRef]
- Carrozza, M.C.; Persichetti, A.; Laschi, C.; Vecchi, F.; Lazzarini, R.; Vacalebri, P.; Dario, P. A wearable biomechatronic interface for controlling robots with voluntary foot movements. IEEE/ASME Trans. Mechatron. 2007, 12, 1–11. [Google Scholar] [CrossRef]
- McClay, I.S.; Robinson, J.R.; Andriacchi, T.P.; Frederick, E.C.; Gross, T.; Martin, P.; Cavanagh, P.R. A profile of ground reaction forces in professional basketball. J. Appl. Biomech. 1994, 10, 222–236. [Google Scholar] [CrossRef]
- Dierick, F.; Penta, M.; Renaut, D.; Detrembleur, C. A force measuring treadmill in clinical gait analysis. Gait Posture 2004, 20, 299–303. [Google Scholar] [CrossRef] [PubMed]
- Karamanidis, K.; Arampatzis, A.; Brüggemann, G.P. Reproducibility of electromyography and ground reaction force during various running techniques. Gait Posture 2004, 19, 115–123. [Google Scholar] [CrossRef]
- Lee, S.J.; Hidler, J. Biomechanics of overground vs. treadmill walking in healthy individuals. J. Appl. Physiol. 2008, 104, 747–755. [Google Scholar] [CrossRef] [PubMed]
- Riley, P.O.; Dicharry, J.; Franz, J.; Della Croce, U.; Wilder, R.P.; Kerrigan, D.C. A kinematics and kinetic comparison of overground and treadmill running. Med. Sci. Sports Exerc. 2008, 40, 1093–1100. [Google Scholar] [CrossRef] [PubMed]
- Bessone, V.; Petrat, J.; Schwirtz, A. Ground Reaction Forces and Kinematics of Ski Jump Landing Using Wearable Sensors. Sensors 2019, 19, 2011. [Google Scholar] [CrossRef] [PubMed]
- Jonsson, M.; Munkhammar, T.; Norrbrand, L.; Berg, H.E. Foot centre of pressure and ground reaction force during quadricepsresistance exercises; a comparison between force plates and a pressureinsole system. J. Biomech. 2019, 87, 206–210. [Google Scholar] [CrossRef] [PubMed]
- Deng, C.; Tang, W.; Liu, L.; Chen, B.; Li, M.; Wang, Z.L. Self-Powered Insole Plantar Pressure Mapping System. Adv. Funct. Mater. 2018, 28, 1801606. [Google Scholar] [CrossRef]
- Hurkmans, H.L.P.; Bussmann, J.B.J.; Selles, R.W.; Horemans, H.L.D.; Benda, E.; Stam, H.J.; Verhaar, J.A.N. Validity of the Pedar Mobile system for vertical force measurement during a seven-hour period. J. Biomech. 2006, 39, 110–118. [Google Scholar] [CrossRef] [PubMed]
- Hurkmans, H.L.P.; Bussmann, J.B.J.; Benda, E.; Verhaar, J.A.N.; Stam, H.J. Accuracy and repeatability of the Pedar Mobile system in long-term vertical force measurements. Gait Posture 2006, 23, 118–125. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors 2018, 18, 2564. [Google Scholar] [CrossRef] [PubMed]
- Fong, D.T.P.; Chan, Y.Y.; Hong, Y.; Yung, P.S.H.; Fung, K.Y.; Chan, K.M. Estimating the complete ground reaction forces withpressure insoles in walking. J. Biomech. 2008, 41, 2597–2601. [Google Scholar] [CrossRef] [PubMed]
- Schepers, H.M.; Koopman, H.F.J.M.; Veltink, P.H.; Member, S. Ambulatory Assessment of Ankle and Foot Dynamics. IEEE Trans. Biomed. Eng. 2007, 54, 895–902. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Inoue, Y.; Shibata, K.A. Wearable Ground Reaction Force Sensor System and Its Application to the Measurement of Extrinsic Gait Variability. Sensors 2010, 10, 10240–10255. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Inoue, Y.; Shibata, K.; Shiojima, K. A Mobile Force Plate and Three-Dimensional Motion Analysis System for Three-Dimensional Gait Assessment. IEEE Sens. J. 2012, 12, 1461–1467. [Google Scholar] [CrossRef]
- Adachi, W.; Tsujiuchi, N.; Koizumi, T.; Shiojima, K.; Tsuchiya, Y.; Inoue, Y. Development of Walking Analysis System Using by Motion Sensor with Mobile Forceplate. J. Syst. Des. Dyn. 2012, 6, 655–664. [Google Scholar]
- Li, G.; Liu, T.; Yi, J.; Wang, H.; Li, J.; Inoue, Y. The Lower Limbs Kinematics Analysis by Wearable Sensor Shoes. IEEE Sens. J. 2016, 16, 2627–2638. [Google Scholar] [CrossRef]
- Worobets, J.; Wannop, J.W.; Worobets, J.A.Y.; Wannop, J.W. Influence of basketball shoe mass, outsole traction, and forefoot bending stiffness on three athletic movements. Sports Biomech. 2017, 14, 352–361. [Google Scholar] [CrossRef] [PubMed]
- Stefanyshyn, D.; Fusco, C. Athletics: Increased shoe bending stiffness increases sprint performance. Sports Biomech. 2004, 3, 55–66. [Google Scholar] [CrossRef] [PubMed]
- Stefanyshyn, D.J.; Wannop, J.W. The influence of forefoot bending stiffness of footwear on athletic injury and performance. Footwear Sci. 2016, 8, 51–63. [Google Scholar] [CrossRef]
- Gu, G.M.; Park, K.; Kim, E.J.; Lee, D.Y.; Kim, J. Foot pronation monitoring using wireless biaxial force sensing system. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Singapore, 11–14 August 2015; pp. 19–24. [Google Scholar]
- Gu, G.M.; Kim, J. Wireless Multi-Axial Force Sensing Shoe for Gait Abnormalities Monitoring. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 13–19 November 2015. [Google Scholar]
- Marasovič, T.; Cecič, M.; Zanchi, V. Analysis and interpretation of ground reaction forces in normal gait. WSEAS Trans. Syst. 2009, 8, 1105–1114. [Google Scholar]
- Pu, F.; Yang, Y.; Fan, X.; Li, S.; Li, Y.; Li, D.; Fan, Y. Optimal estimation of total plantar force for monitoring gait in daily life activities with low-price insole system. J. Mech. Med. Biol. 2014, 14, 1450037. [Google Scholar] [CrossRef]
- Foot. Available online: https://en.wikipedia.org/wiki/Foot (accessed on 19 March 2018).
- Beck, T.J.; Ruff, C.B.; Shaffer, R.A.; Betsinger, K.; Trone, D.W.; Brodine, S.K. Stress fracture in military recruits: Gender differences in muscle and bone susceptibility factors. Bone 2000, 27, 437–444. [Google Scholar] [CrossRef]
- Robertson, D.D.; Mueller, M.J.; Smith, K.E.; Commean, P.K.; Pilgram, T.; Johnson, J.E. Structural changes in the forefoot of individuals with diabetes and a prior plantar ulcer. JBJS 2002, 84, 1395–1404. [Google Scholar] [CrossRef]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot plantar pressure measurement system: A review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef]
- Hessert, M.J.; Vyas, M.; Leach, J.; Hu, K.; Lipsitz, L.A.; Novak, V. Foot pressure distribution during walking in young and old adults. BioMed Cent. Geriatr. 2005, 5, 8. [Google Scholar] [CrossRef]
- Pataky, T.C. Spatial resolution in plantar pressure measurement revisited. J. Biomech. 2012, 45, 2116–2124. [Google Scholar] [CrossRef]
- Gu, G.M.; Shin, Y.K.; Son, J.; Kim, J. Design and characterization of a photo-sensor based force measurement unit (FMU). Sens. Actuators A Phys. 2012, 182, 49–56. [Google Scholar] [CrossRef]
- Keller, T.S.; Weisberger, A.M.; Ray, J.L.; Hasan, S.S.; Shiavi, R.G.; Spengler, D.M. Relationship between vertical ground reaction force and speed during walking, slow jogging, and running. Clin. Biomech. 1996, 11, 253–259. [Google Scholar] [CrossRef]
- Liu, T.; Inoue, Y.; Shibata, K. Wearable force sensor with parallel structure for measurement of ground-reaction force. Meas. J. Int. Meas. Confed. 2007, 40, 644–653. [Google Scholar] [CrossRef]
- Oleson, M.; Adler, D.; Goldsmith, P. A comparison of forefoot stiffness in running and running shoe bending stiffness. J. Biomech. 2005, 38, 1886–1894. [Google Scholar] [CrossRef] [PubMed]
- Kram, R.; Griffin, T.M.; Donelan, J.M.; Chang, Y.H. Force treadmill for measuring vertical and horizontal ground reaction forces. J. Appl. Physiol. 1998, 85, 764–769. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Walking | Running | Jumping | ||||
|---|---|---|---|---|---|---|
| vGRF | apGRF | vGRF | apGRF | vGRF | apGRF | |
| Subject 1 | 8.6 ± 2.5 | 4.8 ± 1.8 | 8.5 ± 1.8 | 5.1 ± 3.1 | 12.8 ± 3.0 | 7.4 ± 3.4 |
| Subject 2 | 11.8 ± 2.1 | 7.4 ± 1.5 | 10.6 ± 2.3 | 7.9 ± 2.4 | 11.3 ± 4.2 | 10.4 ± 4.6 |
| Subject 3 | 9.1 ± 3.5 | 6.0 ± 3.0 | 10.1 ± 2.7 | 5.7 ± 3.0 | 14.8 ± 4.0 | 8.1 ± 3.9 |
| Subject 4 | 9.6 ± 2.8 | 5.2 ± 2.1 | 8.9 ± 1.9 | 6.7 ± 2.7 | 11.6 ± 2.5 | 8.4 ± 2.8 |
| Subject 5 | 7.1 ± 1.9 | 4.4 ± 1.9 | 9.2 ± 2.1 | 4.9 ± 2.9 | 12.8 ± 3.1 | 7.9 ± 1.4 |
| Subject 6 | 8.4 ± 2.0 | 4.6 ± 2.0 | 9.1 ± 2.0 | 7.8 ± 3.8 | 13.1 ± 4.4 | 8.8 ± 3.5 |
| Average | 9.1 ± 2.4 | 5.4 ± 2.1 | 9.4 ± 2.1 | 6.4 ± 3.0 | 12.7 ± 3.5 | 8.5 ± 3.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Kim, S.J.; Na, Y.; Kim, Y.; Kim, J. Development of a Bendable Outsole Biaxial Ground Reaction Force Measurement System. Sensors 2019, 19, 2641. https://doi.org/10.3390/s19112641
Park J, Kim SJ, Na Y, Kim Y, Kim J. Development of a Bendable Outsole Biaxial Ground Reaction Force Measurement System. Sensors. 2019; 19(11):2641. https://doi.org/10.3390/s19112641
Chicago/Turabian StylePark, Junghoon, Sangjoon Jonathan Kim, Youngjin Na, Yeongjin Kim, and Jung Kim. 2019. "Development of a Bendable Outsole Biaxial Ground Reaction Force Measurement System" Sensors 19, no. 11: 2641. https://doi.org/10.3390/s19112641
APA StylePark, J., Kim, S. J., Na, Y., Kim, Y., & Kim, J. (2019). Development of a Bendable Outsole Biaxial Ground Reaction Force Measurement System. Sensors, 19(11), 2641. https://doi.org/10.3390/s19112641