Model-Based Autonomous Navigation with Moment of Inertia Estimation for Unmanned Aerial Vehicles


Abstract
1. Introduction
2. Solutions
2.1. Available Solutions
2.2. Proposed Concept
3. Performance Assessment
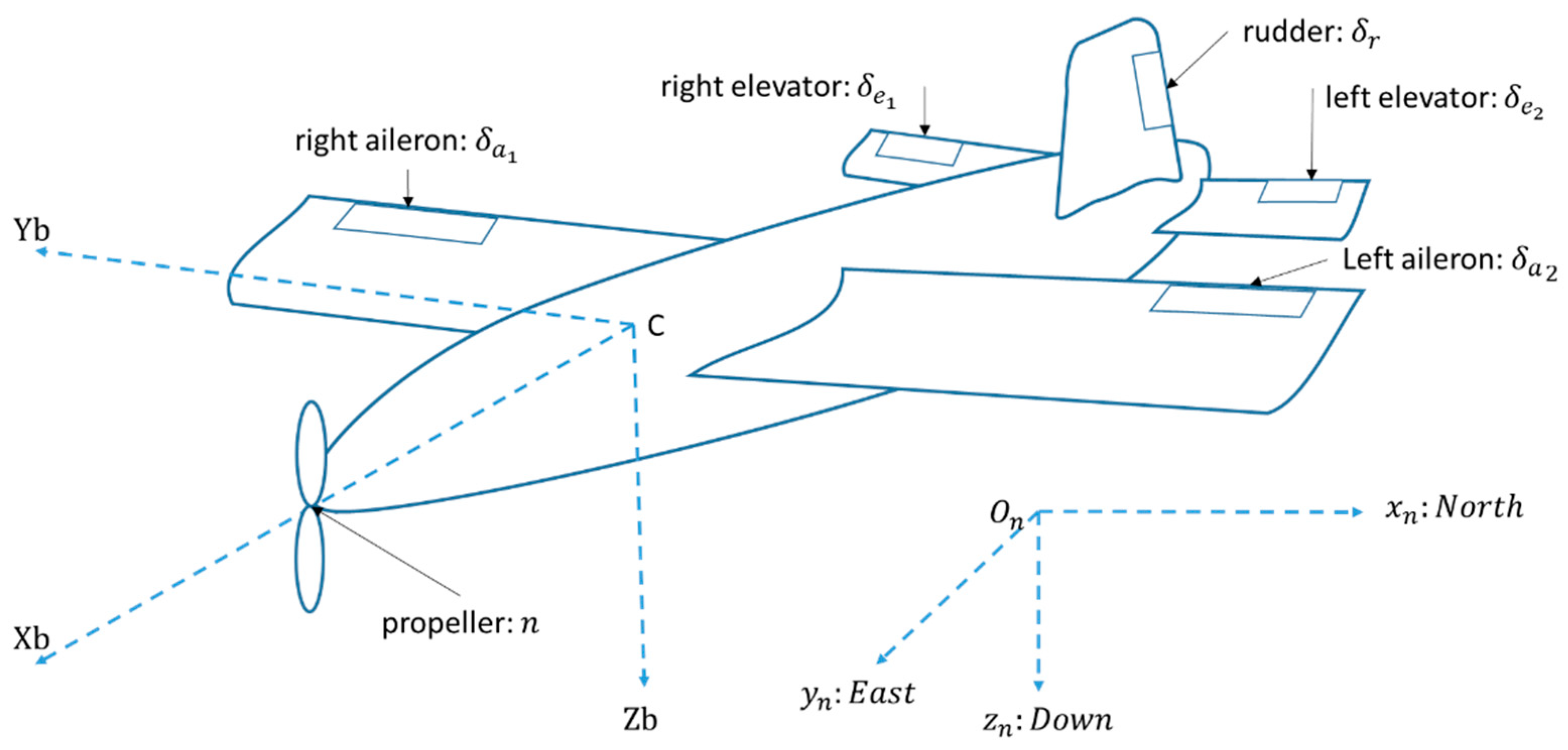
3.1. Coordinate Frame
3.2. Atmospheric Model
3.3. Equations of Rigid-Body Motion
3.4. Filtering Methodology
3.4.1. Process models
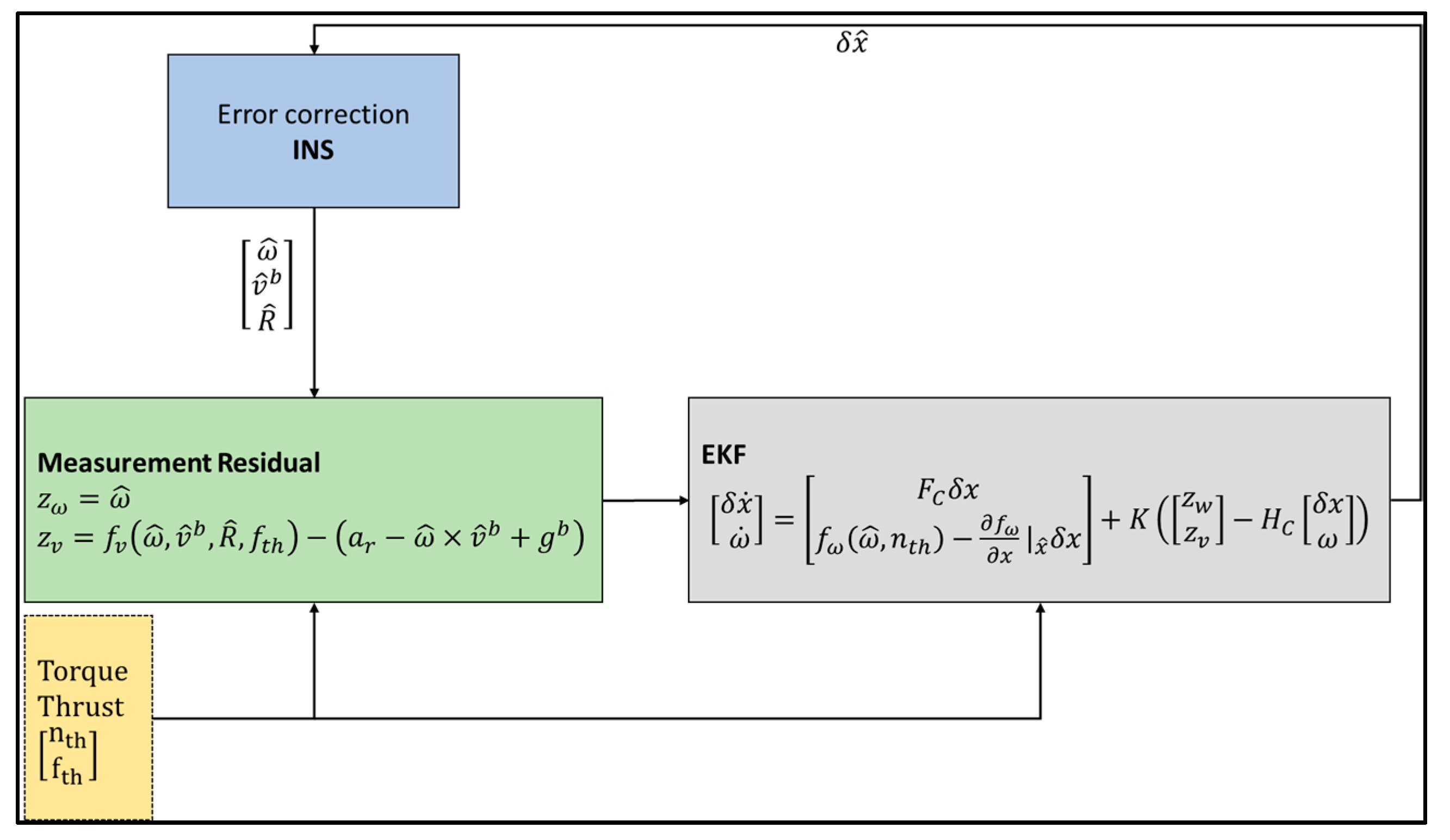
3.4.2. Observation Model
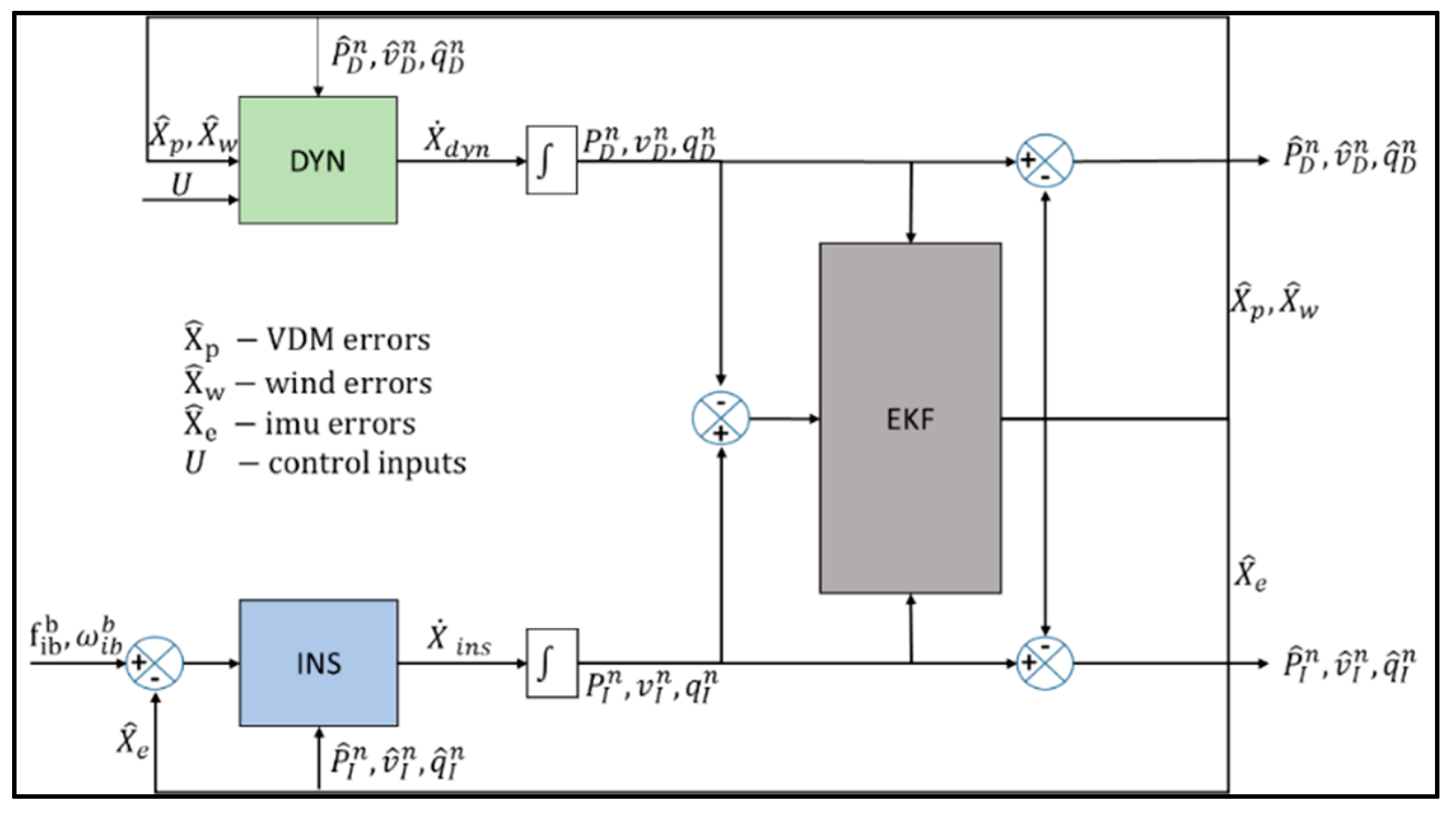
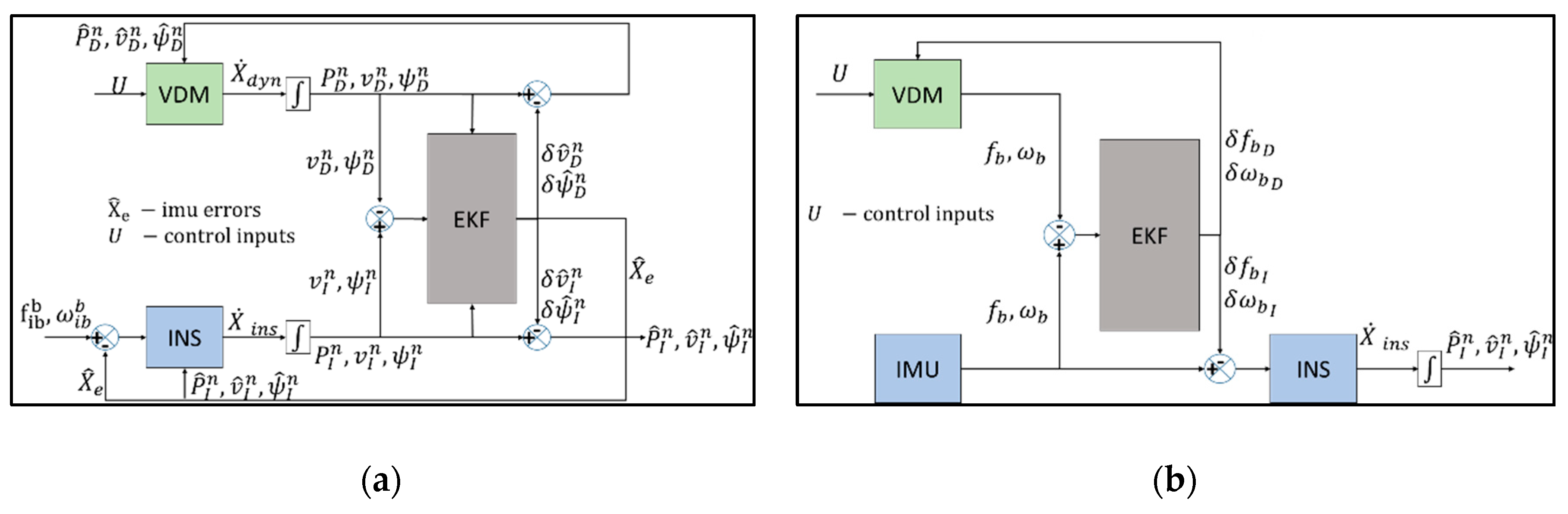
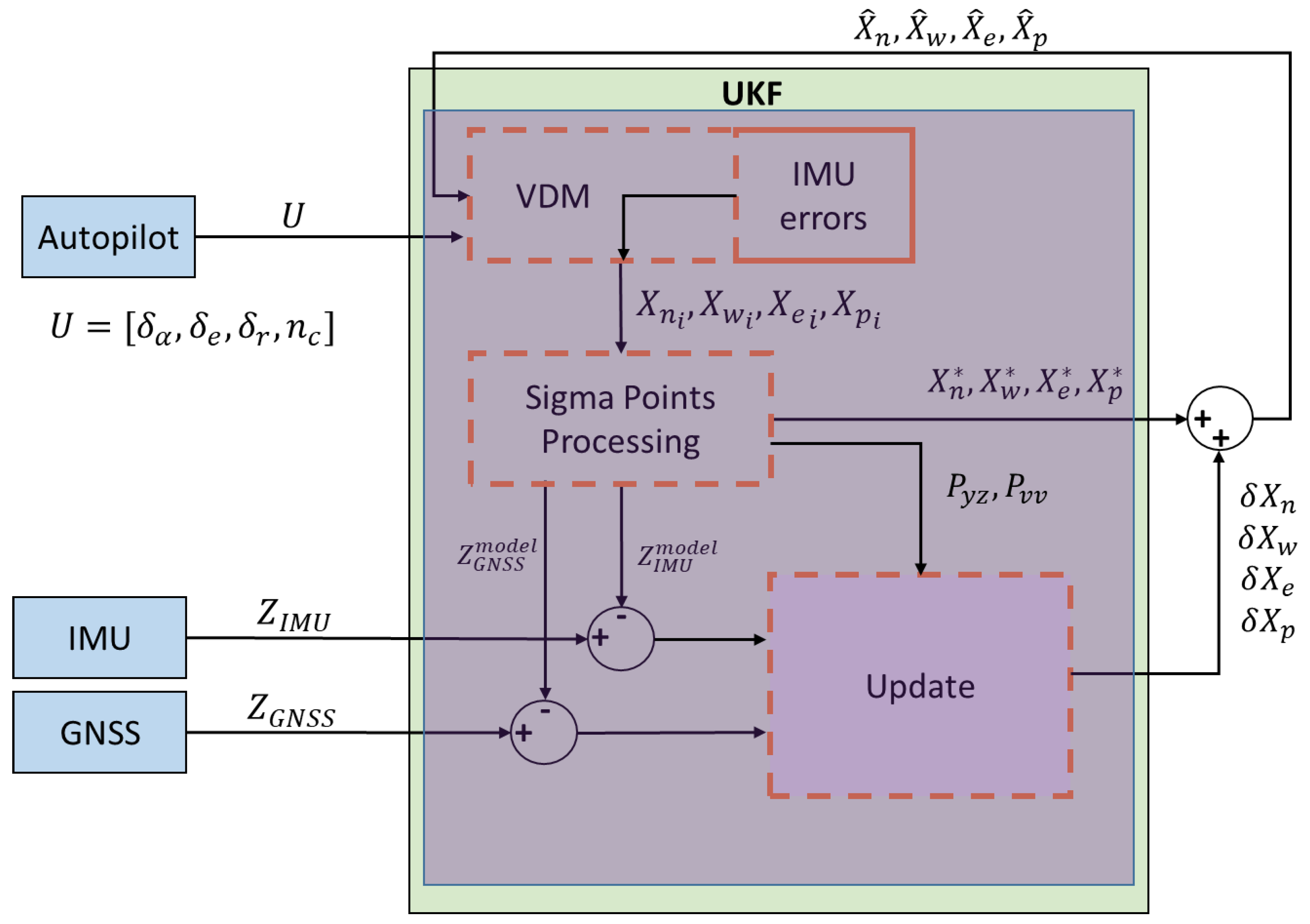
3.4.3. Structure
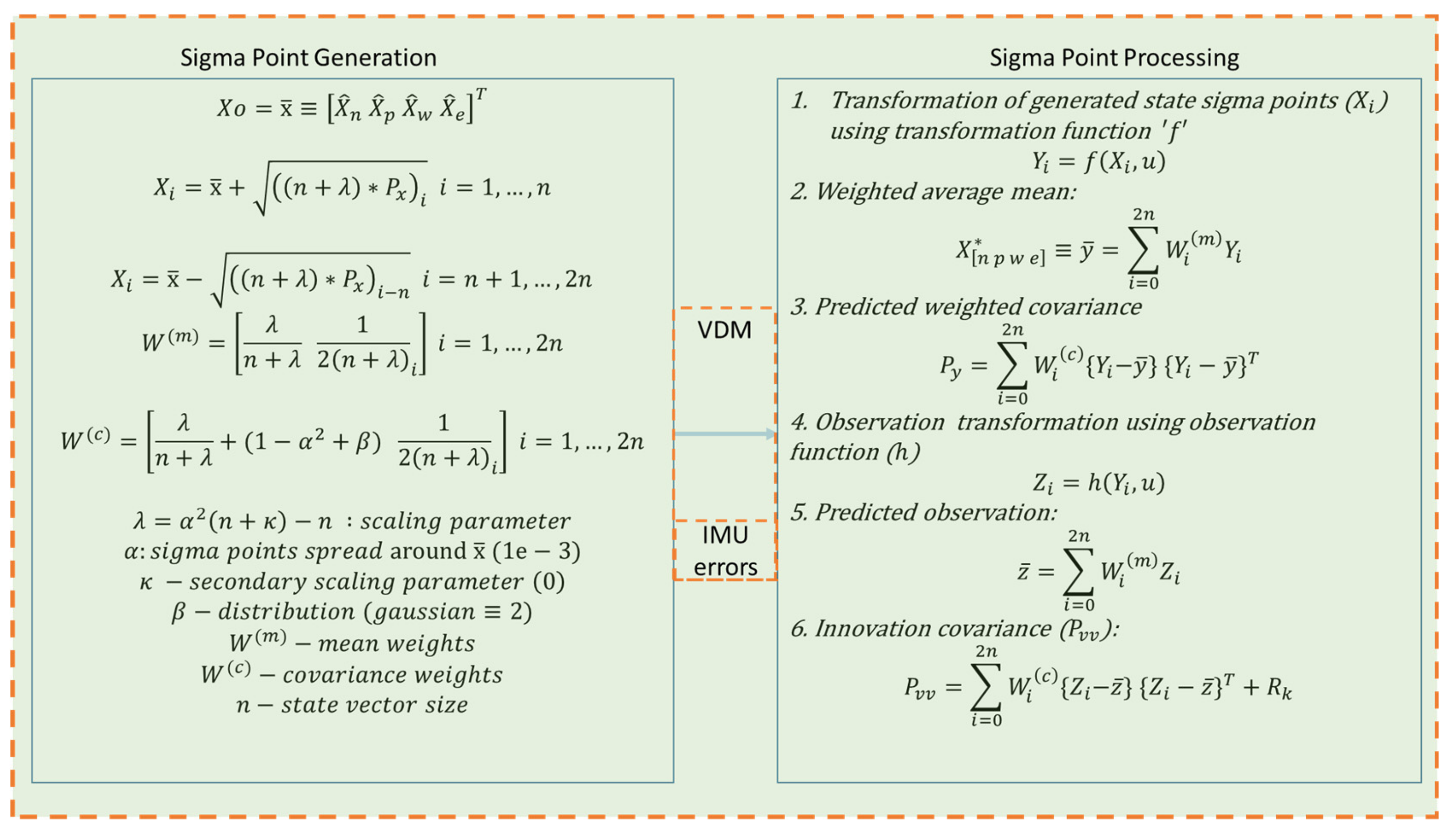
3.4.4. Implementation
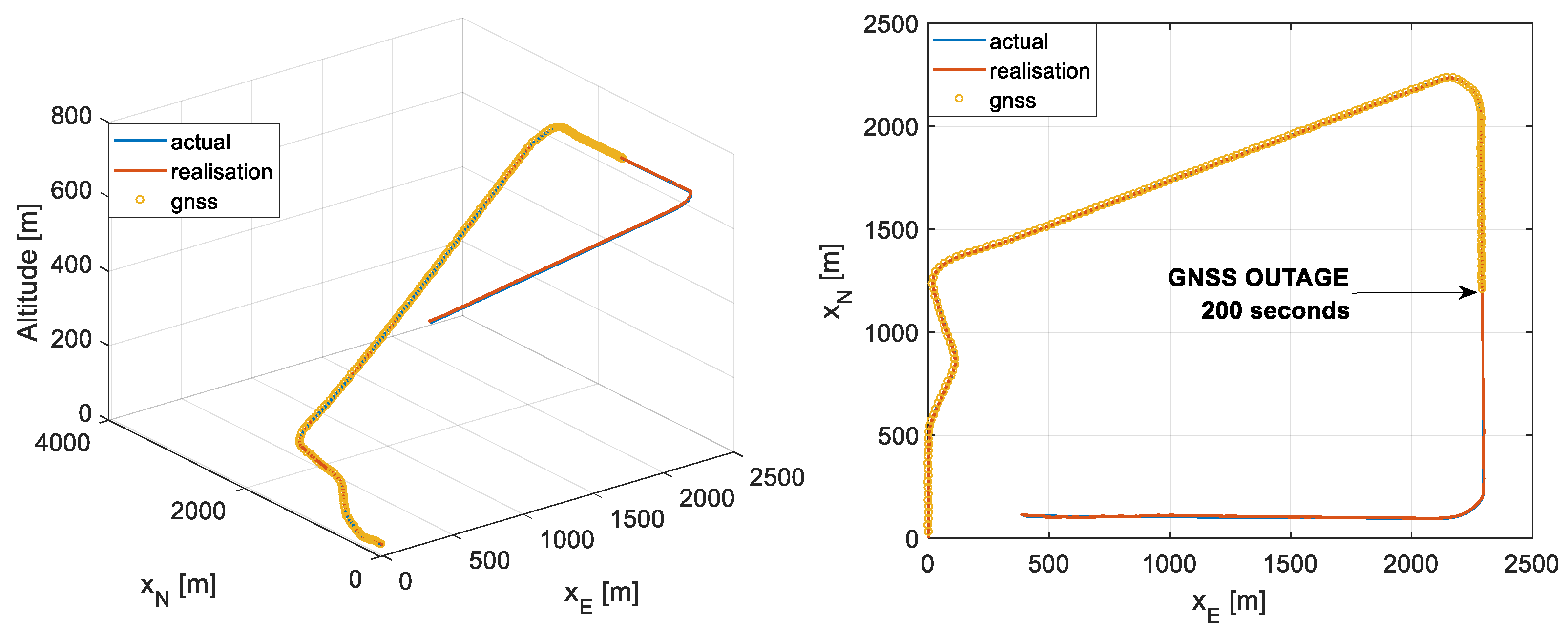
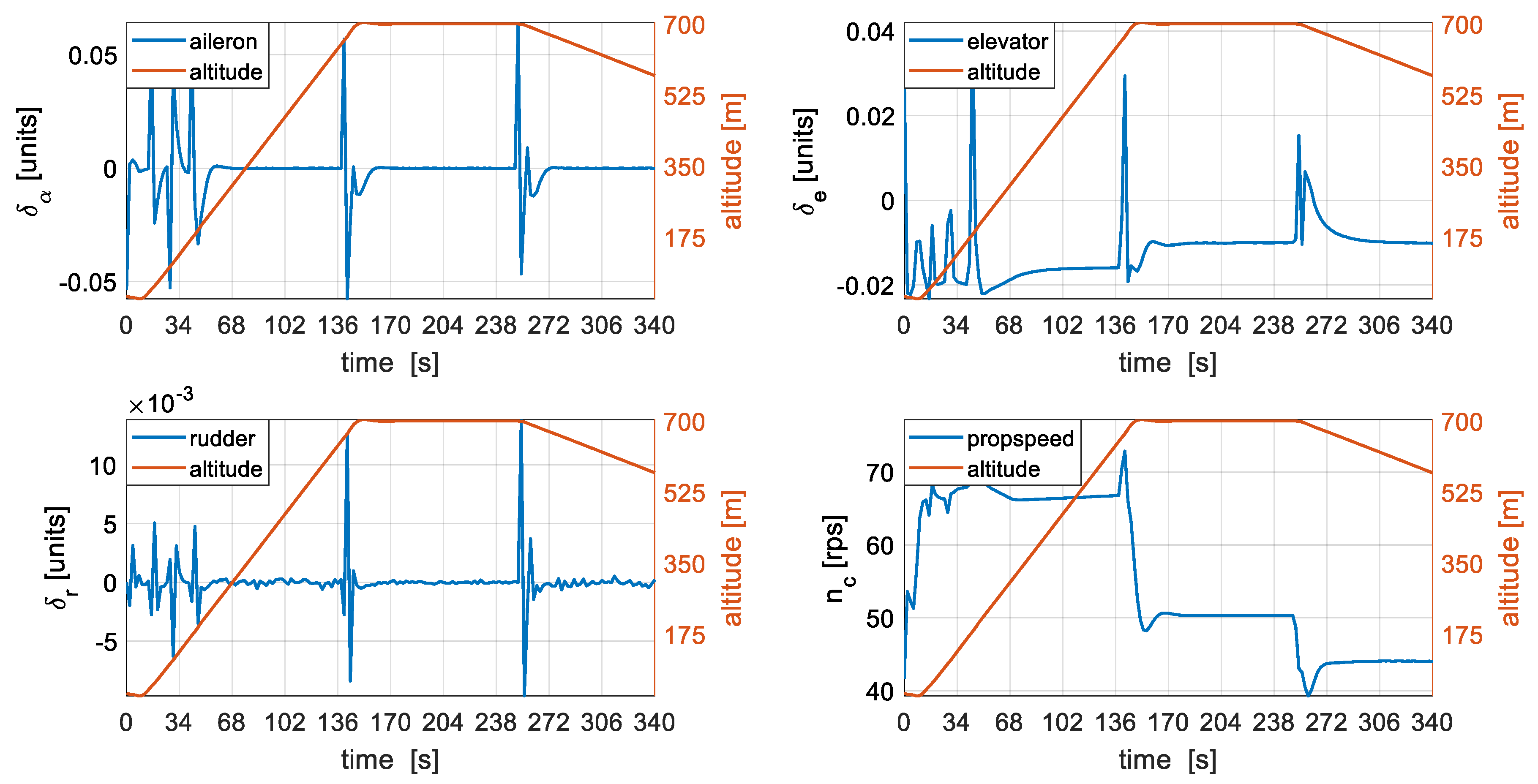
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kim, J.; Sukkarieh, S. A Baro-Altimeter Augmented INS/GPS Navigation System for an Uninhabited Aerial Vehicle. In Proceedings of the 6th International Symposium on Satellite Navigation Technology Including Mobile Positioning & Location Services, Melbourne, Australia, 22–25 July 2003; pp. 1–12. [Google Scholar]
- George, M.; Sukkarieh, S. Tightly Coupled INS/GPS with Bias Estimation for UAV Applications. In Proceedings of the Australasian Conference on Robotics and Automation 2005, Sydney, Australia, 5–7 December 2005. [Google Scholar]
- Babu, R.; Wang, J. Ultra-tight GPS/INS/PL integration: A system concept and performance analysis. GPS Solut. 2009, 13, 75–82. [Google Scholar] [CrossRef]
- Brown, R.; Hwang, P.Y. Introduction to Random Signals and Applied Kalman Filtering, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2012; ISBN 9780470609699. [Google Scholar]
- Falco, G.; Pini, M.; Marucco, G. Loose and tight GNSS/INS integrations: Comparison of performance assessed in real Urban scenarios. Sensors 2017, 17, 255. [Google Scholar] [CrossRef] [PubMed]
- Hide, C. Integration of GPS and Low Cost INS Measurements. Ph.D. Dissertation, University of Nottingham, Nottingham, UK, 2003. [Google Scholar]
- Wang, J.; Garratt, M.; Lambert, A.; Wang, J.J.; Han, S.; Sinclair, D. Integration of Gps/Ins/Vision Sensors to Navigate Unmanned Aerial Vehicles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 963–970. [Google Scholar]
- Lau, T.K.; Liu, Y.H.; Lin, K.W. Inertial-based localization for unmanned helicopters against GNSS outage. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1932–1949. [Google Scholar] [CrossRef]
- Quinchia, A.G.; Falco, G.; Falletti, E.; Dovis, F.; Ferrer, C. A comparison between different error modeling of MEMS applied to GPS/INS integrated systems. Sensors 2013, 13, 9549–9588. [Google Scholar] [CrossRef] [PubMed]
- Papadimitratos, P.; Jovanovic, A. Protection and fundamental vulnerability of GNSS. In Proceedings of the 2008 IEEE International Workshop on Satellite and Space Communications, Toulouse, France, 1–3 October 2008; pp. 167–171. [Google Scholar]
- Tawk, Y.; Tomé, P.; Botteron, C.; Stebler, Y.; Farine, P.-A. Implementation and Performance of a GPS/INS Tightly Coupled Assisted PLL Architecture Using MEMS Inertial Sensors. Sensors 2014, 14, 3768–3796. [Google Scholar] [CrossRef] [PubMed]
- Groves, P.D. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: Norwood, MA, USA, 2008; ISBN 978-1-58053-255-6. [Google Scholar]
- Madison, R.; Andrews, G.; DeBitetto, P.; Rasmussen, S.; Bottkol, M. Vision-Aided Navigation for Small UAVs in GPS-Challenged Environments. In Proceedings of the AIAA Infotech at Aerospace Conference, Rohnert Park, CA, USA, 7–10 May 2007. [Google Scholar]
- Beard, R.W.; McLain, T.W. Small Unmanned Aircraft: Theory and Practice; Princeton University Press: Princeton, NJ, USA, 2013; Volume 36, ISBN 9780691149219. [Google Scholar]
- Vasconcelos, J.F.; Silvestre, C.; Oliveira, P.; Guerreiro, B. Embedded UAV model and LASER aiding techniques for inertial navigation systems. Control Eng. Pract. 2010, 18, 262–278. [Google Scholar] [CrossRef]
- El-Diasty, M.; Pagiatakis, S. A Rigorous Temperature-Dependent Stochastic Modelling and Testing for MEMS-Based Inertial Sensor Errors. Sensors 2009, 9, 8473–8489. [Google Scholar] [CrossRef] [PubMed]
- Koifman, M.; Bar-Itzhack, I.Y. Inertial navigation system aided by aircraft dynamics. IEEE Trans. Control Syst. Technol. 1999, 7, 487–493. [Google Scholar] [CrossRef]
- Bryson, M.; Sukkarieh, S. Vehicle Model Aided Inertial Navigation for a UAV using Low-cost Sensors. In Proceedings of the Australasian Conference on Robotics and Automation 2004, Canberra, Australia, 6–8 December 2004. [Google Scholar]
- Crocoll, P.; Görcke, L.; Trommer, G.F.; Holzapfel, F. Unified Model Technique for Inertial Navigation. NAVIGATION 2013, 60, 179–193. [Google Scholar] [CrossRef]
- Khaghani, M.; Skaloud, J. Autonomous Vehicle Dynamic Model-Based Navigation for Small UAVs. NAVIGATION 2016, 63, 345–358. [Google Scholar] [CrossRef]
- Crocoll, P.; Seibold, J.; Scholz, G.; Trommer, G.F. Model-Aided Navigation for a Quadrotor Helicopter: A Novel Navigation System and First Experimental Results. NAVIGATION 2014, 61, 253–271. [Google Scholar] [CrossRef]
- Sendobry, A. Control System Theoretic Approach to Model Based Navigation; Technische Universität Darmstadt: Darmstadt, Germany, 2014. [Google Scholar]
- Lyu, P.; Lai, J.; Liu, J.; Zhang, L.; Liu, S. A novel integrated navigation system based on the quadrotor dynamic model. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 688–695. [Google Scholar]
- Julier, S.J.; Durrant-whyte, H.F. On the Role of Process Models in Autonomous Land Vehicle Navigation Systems. IEEE Trans. Robot. Autom. 2003, 19, 1–14. [Google Scholar] [CrossRef]
- Vissière, D.; Bristeau, P.-J.; Martin, A.P.; Petit, N. Experimental autonomous flight of a small-scaled helicopter using accurate dynamics model and low-cost sensors. In Proceedings of the 17th World Congress of the International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008; pp. 14642–14650. [Google Scholar]
- Dadkhah, N.; Mettler, B.; Gebre-egziabher, D. A Model-Aided AHRS for Micro Aerial Vehicle Application. In Proceedings of the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2008), Savannah, GA, USA, 16–19 September 2008; pp. 545–553. [Google Scholar]
- Crocoll, P.; Trommer, G.F. Quadrotor Inertial Navigation Aided by a Vehicle Dynamics Model with In-Flight Parameter Estimation. In Proceedings of the 27th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2014), Tampa, FL, USA, 8–12 September 2014; pp. 1784–1795. [Google Scholar]
- Mueller, K.; Crocoll, P.; Trommer, G.F. Model-Aided Navigation with Wind Estimation for Robust Quadrotor Navigation. In Proceedings of the 2016 International Technical Meeting of the Institute of Navigation, Monterey, CA, USA, 25–28 January 2016; pp. 689–696. [Google Scholar]
- Khaghani, M.; Skaloud, J. Assessment of VDM-based autonomous navigation of a UAV under operational conditions. Rob. Auton. Syst. 2018, 106, 152–164. [Google Scholar] [CrossRef]
- Sendobry, A. A Model Based Navigation Architecture for Small Unmanned Aerial Vehicles. In Proceedings of the European Navigation Conference, London, UK, 29 November–1 December 2011. [Google Scholar]
- Khaghani, M.; Skaloud, J. VDM-based UAV Attitude Determination in Absence of IMU Data. In Proceedings of the European Navigation Conference, ENC 2018, Gothenburg, Sweden, 14–17 May 2018; pp. 84–90. [Google Scholar]
- Zahran, S.; Moussa, A.; El-Sheimy, N.; Sesay, A.B. Hybrid Machine Learning VDM for UAVs in GNSS-denied Environment. NAVIGATION 2018, 65, 477–492. [Google Scholar] [CrossRef]
- Mohammadkarimi, H.; Nobahari, H. A Model Aided Inertial Navigation System for Automatic Landing of Unmanned Aerial Vehicles. NAVIGATION 2018, 65, 183–204. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Manual of the ICAO Standard Atmosphere Extended to 80 Kilometres (262,500 Feet), 3rd ed.; International Civil Aviation Organization: Montreal, QC, Canada, 1993; ISBN 92-9194-004-6. [Google Scholar]
- Ducard, G. Fault-Tolerant Flight Control and Guidance Systems for a Small Unmanned Aerial Vehicle; ETH: Zurich, Switzerland, 2007. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. New extension of the Kalman filter to nonlinear systems. Signal Process. Sensor Fusion Target Recogn. 1997. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-whyte, H.F. A New Approach for Filtering Nonlinear Systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Gelb, A.; Kasper, J.F.; Nash, R.A.; Price, C.F.; Sutherland, A.A. Applied Optimal Estimation; MIT Press: Cambridge, MA, USA, 1974; ISBN 0262200279. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Accelerometer | Gyroscope |
|---|---|---|
| Random bias () | ||
| White noise () | ||
| First-order Gauss–Markov | ||
| Correlation Time () | ||
| Sampling Frequency |
| State | Standard Deviation |
|---|---|
| Position | |
| Velocity | |
| Attitude | |
| Rotation rates | |
| Propeller speed | |
| Model parameters | |
| Moment of Inertia |
| State | Standard Deviation |
|---|---|
| Position | |
| Velocity | |
| Attitude | |
| Rotation rates | |
| Propeller speed Accelerometer Bias Gyroscope Bias Wind | |
| Model parameters | |
| Moment of Inertia |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mwenegoha, H.; Moore, T.; Pinchin, J.; Jabbal, M. Model-Based Autonomous Navigation with Moment of Inertia Estimation for Unmanned Aerial Vehicles. Sensors 2019, 19, 2467. https://doi.org/10.3390/s19112467
Mwenegoha H, Moore T, Pinchin J, Jabbal M. Model-Based Autonomous Navigation with Moment of Inertia Estimation for Unmanned Aerial Vehicles. Sensors. 2019; 19(11):2467. https://doi.org/10.3390/s19112467
Chicago/Turabian StyleMwenegoha, Hery, Terry Moore, James Pinchin, and Mark Jabbal. 2019. "Model-Based Autonomous Navigation with Moment of Inertia Estimation for Unmanned Aerial Vehicles" Sensors 19, no. 11: 2467. https://doi.org/10.3390/s19112467
APA StyleMwenegoha, H., Moore, T., Pinchin, J., & Jabbal, M. (2019). Model-Based Autonomous Navigation with Moment of Inertia Estimation for Unmanned Aerial Vehicles. Sensors, 19(11), 2467. https://doi.org/10.3390/s19112467