2. The Observer Setup–Problem Formulation of the MHE-Based GNSS/INS Fusion
In a realistic application with a consumer quality GPS sensor, a latency between 50–1000 ms [
11,
12] is usually considered. This implies a drastic delay in comparison to other in-vehicle sensor systems, for example, the inertial measurement unit (IMU). Here, this fact motivates the discussed observer example with highly delayed measurements in a vehicle position estimation application.
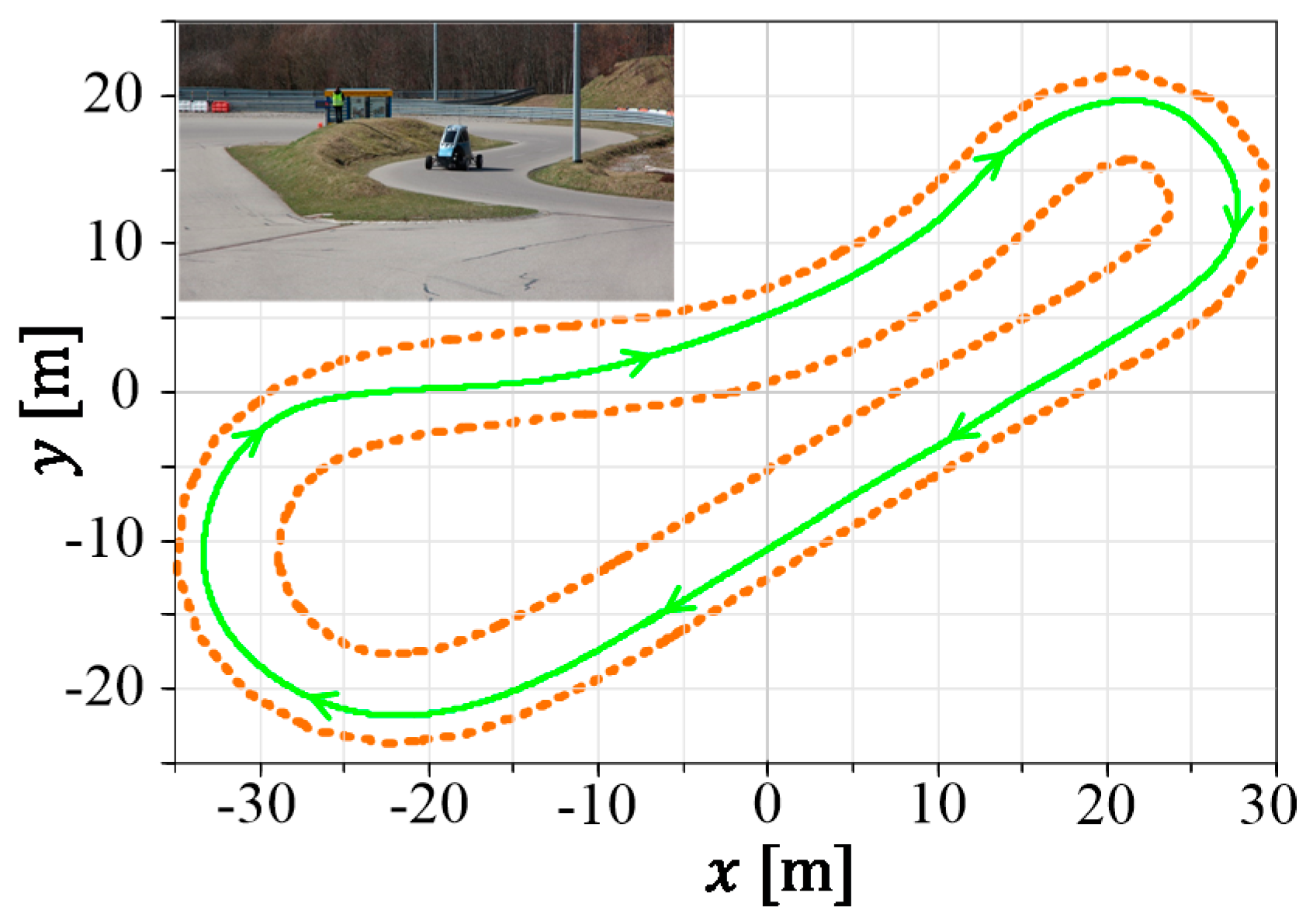
For the experimental evaluation of the constrained state estimation of DLR’s ROboMObil, several test campaigns were carried out at the ADAC (General German Automobile Club) vehicle testing ground in Kempten, Germany. Here, tests of an advanced version of the interactive vehicle path following control (PFC) [
2,
3] have been performed. In the top left of
Figure 1, a portrait of the testing track is shown. The green line depicts the preplanned vehicle path, while the road boundaries are represented by the dotted-orange lines.
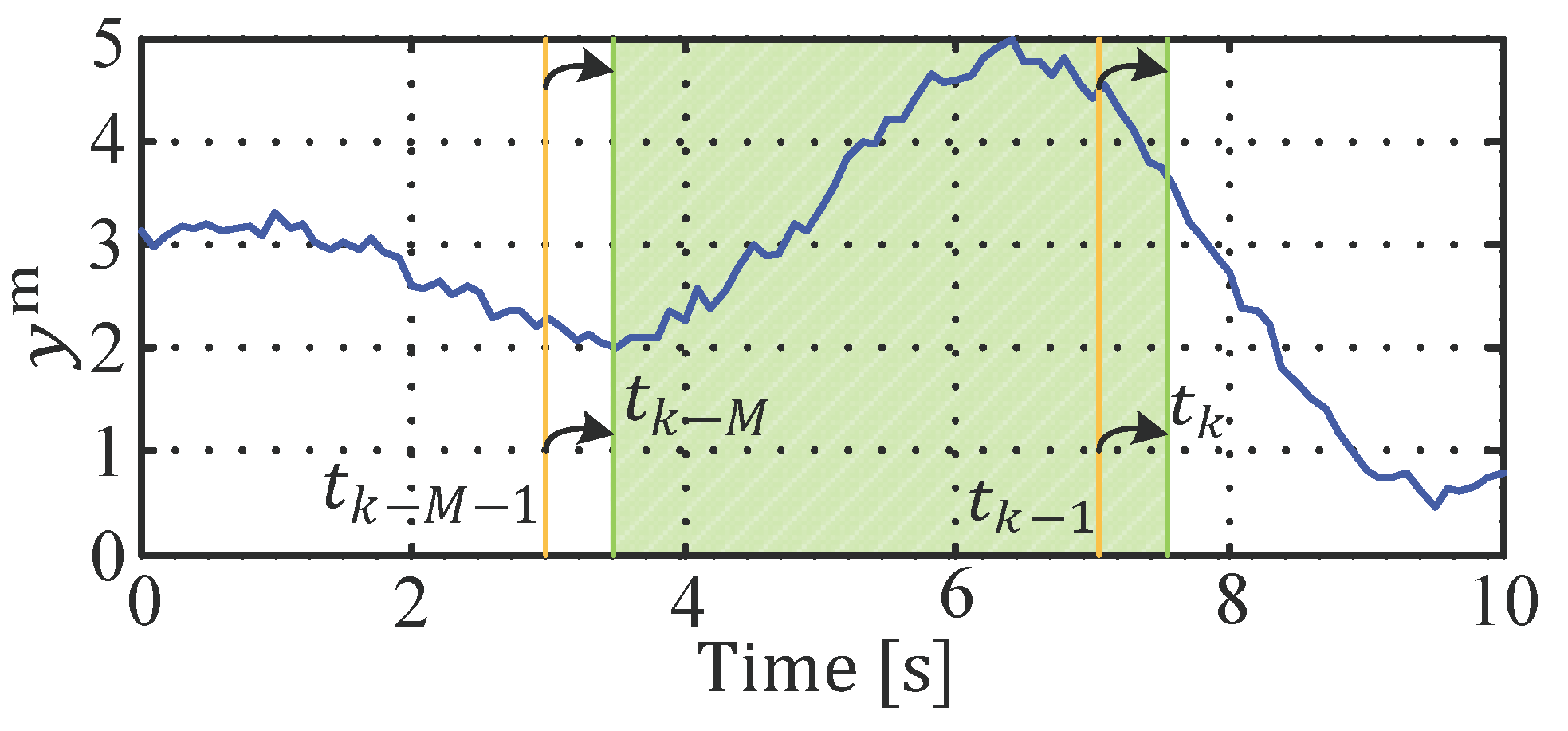
The ground-truth data was gathered with help of a differential GPS in order to guarantee high fidelity vehicle state measurements for the experimental validation. In
Figure 2, the situation of the MHE estimator proposed here with delayed measurements is depicted. At the current time instance
, the estimator receives the measurements of the current vehicle yaw rate state (
) and the delayed measurements (
), which are delayed for
samples, and thus belong to the past vehicle state (
). Later, it will be shown that the incorporation of these delayed measurements in a conventional one-step estimation approach (i.e., a Kalman filter) leads to a poor performance or even instability.
2.1. The Extended Single Track Prediction Model
As the scope of the proposed observer (as implied in the introduction of this section) lies on the observation of the actual vehicle states,
for path following controllers in autonomous vehicles, as proposed by the authors of [
2], an observer synthesis model reproduction depth has been chosen that meets the requirements of the computational efficiency and fidelity. An extended single track model (ESTM) was chosen for the forward driving operation mode
, which incorporates vehicle standstill functionalities, rolling resistance, drag forces, and Pacejka’s Magic Formula [
18] lateral characteristics of the tires. The following nomenclature is defined (cf.
Figure 3):
The details of the extended single track model equation derivation are given in the
Appendix A. It is worth mentioning that with the Modelica modeling technology, it was easily possible to integrate “if-else” constructs, which are efficiently processed by the event handling features of the compiler, while experimenting with varying discretization methods and sample rates, as the model is in continuous-time formulation. The vehicle state vector is denoted as follows, and is graphically exemplified in
Figure 3:
2.2. Road Boundaries Constraint Formulation and Evaluation
In this section, a methodology is described for incorporating advance-known street boundaries (e.g., from digital maps in combination with vision sensors) into the vehicle position estimation. It is assumed that the initial vehicle position (
) is sufficiently precisely known, and the corresponding path parameter (
) (cf. Equation (2)) can be determined by means of a time independent path interpolation (TIPI) [
2,
3], which is explained in the following.
Ideally, the actual path position and the position of the car coincide,
(cf.
Figure 4). To approximate this condition, it is necessary to minimize the displacement (
) between the vehicle and reference path, as depicted in the following:
The geometrical interpretation of this minimization objective is that
can be determined by projecting
orthogonally on the path
. For the TIPI this condition implies that the inverse of the maximal curvature of the demanded vehicle path defines the maximum lateral displacement for which
exists:
The interested reader can find details on how this optimization problem is solved in the literature [
3].
The parametric path contains the following quantities for the calculation of the road boundaries constraints: the position and of the road middle lane, the positions of the left ( and the right () border, and the corresponding path orientation and its curvature .
The extension of the vehicle prediction model (cf.
Appendix A) with the roadway boundaries interpolation yields an extra state (
), which is a non-physical state that belongs to the estimation task. The experimental tests considering
as an estimated state showed that this configuration leads to unsatisfactory results in the overall observer performance. Therefore, this state is separated from the state correction step in the Kalman algorithms (cf.
Section 3.2).
In
Figure 5, the calculation of the roadway border constraints is graphically shown. By means of the above described algorithm, a path parameter (
) can be found for which the longitudinal derivation error of the vehicle’s actual position (
) tends to zero.
By means of the path normal vector (
), represented in the inertial coordinate system (Equation (2)), an inequality function
is calculated that penalizes the positions outside of the roadway borders, as follows:
This nonlinear inequality function,
, can be handled directly by a posteriori constraint projection method for an (extended) Kalman filter. Details on the simplified Newton descent search algorithm used here are given in
Appendix B. For the real-time capable moving horizon estimation algorithm in
Section 3. it is necessary to linearize
at all of the time instances
, where it is likely that a constraint may be violated by the estimator
, as follows:
By rearranging Equation (4), the linearized inequality description in Equation (5) can be formulated as follows:
Figure 6 shows an example for the calculation of the nonlinear constraint function. In the left plot, a street is marked with the left
and the right
street boundaries, while the car (red line with direction arrows) crosses the right boundary in the hairpin curve. This leads to a violation of the right border constraint condition
, as can be seen in the right plot of
Figure 6.
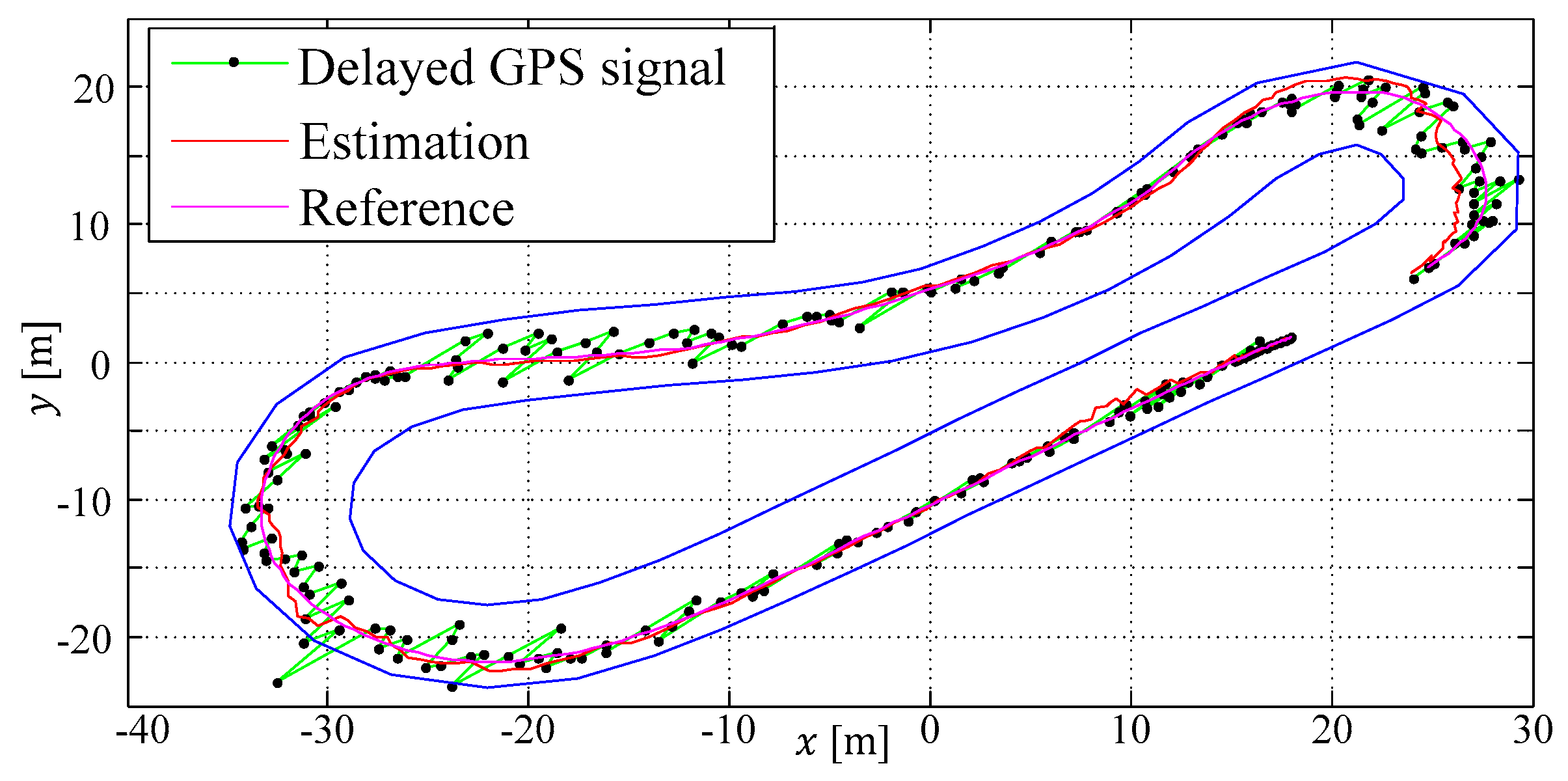
Assuming that only the vehicle yaw rate (
) is available to the (extended) Kalman filter, the position estimate would drift away, as shown in
Figure 7 dark green line). Making use of the proposed boundary estimation approach used here, in combination with the inequality handling feature from the author of [
2], yields a bounded and valid result (light green line), as follows:
3. Real-Time Nonlinear Moving Horizon Estimation
In this section, a nonlinear moving horizon estimator (MHE), which utilizes multiple past measurements to estimate the state at the current time instance, is introduced. In addition to the state constraints, delayed measurements can be directly incorporated into the problem formulation.
Referring to the literature [
19], the approach of the moving horizon estimation is the reformulation of the general optimization objective of the Kalman filter theory, also known as the full-information filter. In the nonlinear case, the minimization problem can be written as follows:
where in the nomenclature of
is denoted a with
, and is a weighted least squares minimization problem of a function
with respect to
. The functions
and
are the nonlinear state functions, resprectivley, of the model output equations. The matrix
and the vector
represent the initial guess values of the covariance and the system state. The matrix
denotes the covariance of the system states, and its entries constitute the confidence in the underlying prediction model and can be tuned by the application engineer. The second tuning matrix
represents the confidence in the actual measurements. The well-known Kalman filter algorithms (e.g., extended Kalman filter (EKF) and unscented Kalman filter (UKF)) are special cases of this optimization objective, in the case that only the measurements at the current time instance (
) are available [
19]. As the dimension,
, of the optimization problem would grow tremendously with proceeding time, in MHE theory, the time span is limited to a predefined length of previous time instances and is shifted in every sample step.
Therefore, a sliding window with
steps back from the actual time instance (
), is considered to smooth the state estimation. In every sample step (
), this window is shifted one-step ahead—in
Figure 8 this is illustrated for one measurement variable,
. At the filter initialization (
), only one measurement is available, and therefore the measurement storage must be filled with
steps before the window starts to move. Afterwards, the window length is kept constant and all of the past
measurements are taken into account (the window with
measurements is colored in green in the subsequent figures). In other words, MHE can be seen as a real-time calculable approximation of the full-information filter.
In this way, the estimate gets more robust against external disturbances, delayed measurements can be incorporated (cf.
Section 3.2.3), and also constraints can be imposed directly [
19].
By means of the proposed estimation framework presented in [
2], it is also possible to incorporate complex nonlinear Modelica-based prediction models to moving the horizon estimation. In the context of toolchains for observer code generation and nonlinear constraint MHE, different research studies were recently published that utilize the ACADO toolbox for embedded [
20] and real-time moving horizon estimation [
21,
22]. They make use of the real-time iteration (RTI) scheme transferred to the MHE approach in he literature [
23]. The basic strategy is to discretize the estimation problem with a multiple shooting discretization using numerical integration. Then, the main idea of the RTI scheme is to use the shifted state variables of the previous optimization run as the new linearization point, and to perform only one SQP step per sample time [
20].
In this work, the problem formulation in Equation (7) is extended for nonlinear systems incorporating linear state constraints, tailored to meet real-time application restrictions by means of a nonlinear gradient descent search. Details on the reasons for this approach are given in the following section.
All of the system function evaluations were done by the FMI [
6] (cf. also
Section 3.2) and are marked in red in the following section. The optimization vector (
) is assembled with
subsequent discrete state vectors within the current estimation window. The optimization cost function
in Equation (9) is composed of the following three parts.
The first argument
is the arrival cost, which summarizes all of the available information prior to the estimation window; this can also be seen as a regulation term on the states at
[
21]. It is introduced so as to guarantee that the oldest estimation (
) is coincident with the corrected Kalman filter state estimation (
) weighted with the information matrix (
). Note that in every moving horizon estimation step, a Kalman filter step from
to
is performed to fulfill the Kalman state estimation theory—Equation (7). The information matrix,
, is calculated via the inverse of the covariance matrix
. As direct matrix inversion should be avoided, because of the numerical stability and accuracy, the author proposes using a square root (SR)-UKF or SR-EKF Kalman filter algorithm that uses square-root decomposition and rank 1 updates to propagate the covariance matrix in a lower triangular form,
. The inverse of the lower triangular (
) can be efficiently calculated by the LAPACK routine DTRTRI, and therefore, the propagated information matrix results in
.
The second argument, is the, over the time instances ( to ) summarized and with weighted, difference between the available measurements and the output equations of the underlying prediction model as function of the states of the current optimization vector .
Finally, the third argument, , denotes the, over the time instances ( to ) summarized and with weighted, difference between the optimized states and the open loop integrated prediction model states in Equation (10). is calculated only once per optimization step by a simulation using as start vector and as input vector.
In
Figure 9, a qualitative graphical interpretation of the optimization problem for a scalar problem with
is shown. The circle points of the quantities denote the particular values at a discrete-time instance, which is evaluated in the objective function Equation (9).
The complete algorithm is summarized in Algorithm 1. In the first step, all of the past measurements are stored in a first in first out (FIFO) ring buffer. As long as not enough measurements for the complete window
are available, the measurements and the model inputs are appended to the buffer.
| Algorithm 1. Algorithm for a nonlinear MHE |
| Set and set |
| while (brake==false) do |
| Fill ring buffer with measurements and system inputs: |
| if then |
| append to and to |
| else |
| left shift one entry of and |
| and append respectively |
| end if |
| Optimize over stored measurement window (Equation (8)): |
| if then |
| Propagate via a Kalman Filter step (e.g., EKF or UKF cf. 2): |
| xKF( |
| Project states on the constrained area (c.f. Appendix B) |
| |
| end if |
|
| end while |
3.1. A Nonlinear Gradient Descent Opimization Algorithm for MHE
For the solution of the proposed MHE problem formulation, Equation (8) to Equation (10), a nonlinear gradient descent search algorithm (NG) was chosen, because for this solver, only the first derivatives of the minimization objective (Equations (8)–(10)) are needed, which is an important constraint for the available interfaces of the extended FMI 2.0 co-simulation interface (see [
2]—Section 4.2.2). Furthermore, linear equality and inequality constraints can be incorporated easily, and the method can be stopped after every optimization step, still offering a reliable sub-optimal solution. The latter is important if the optimization is not finalized at the next sample instant. The algorithm of the constrained NG is given in Algorithm 2, for more details see, for example [
24]. This gradient descent search algorithm is already successfully being used on a rapid-prototyping real-time system. For example, it was employed—similar to the one proposed in this manuscript—in previous research on path planning tasks [
4]. This gradient descent optimization has been implemented and successfully tested on a dSpace real-time control system with a sample time of 100 ms. The gradient descent algorithm has a fixed number of maximum iterations so as to guarantee the real-time constraint. Even if the global optimum is not found, the suboptimal solution will be better than the initial start solution. Here, the implemented NG algorithm for the observer framework is tailored for the nonlinear moving horizon estimator to meet the maximum flexibility in the calculation of the gradient, and the objective function calculation. That is, it is possible for the user to modify the calculation in Modelica with replaceable function pointers, without modifying the optimization algorithm itself. This will be shown later in an example in
Section 3.2.
| Algorithm 2. Nonlinear gradient search algorithm for MHE |
| Set and |
| whiledo |
| if unconstrained then |
| |
| elseif constrained then |
| |
| |
| end if |
| Determine step size via line search: |
| Optimization step: |
| |
| end while |
In step 1 (line 1), an initial solution,
, is needed. Well-proven strategies for its calculation are an open loop integration of the prediction model from
to
, or a left shift of the last optimization vector
and appending an open loop integration from
to
. In the unconstrained (lines 3–4) case of the second step, the gradient
of the descent direction can be directly calculated, as shown in Algorithm 3.
| Algorithm 3. MHE calculation by means of functional mockup unit (FMU) evaluations |
| Define: and |
|
| fordo |
|
| end for |
Also, if equality constraints (lines 5–7) should be incorporated,
, the descent direction must be projected on these by means of the Moore–Penrose pseudoinverse [
25]
. In most of the MHE applications, this step can be neglected (i.e.,
), as only inequality constraints are of mayor interest in order to limit the boundaries of the states. To guarantee that the descent direction does not violate the inequality constraints, a set of possible active constraints,
, in the null space of the linear constraints must be determined. The descent direction is projected on the active constraints
. More algorithm implementation details can be found in the literature [
24].
In step 3 (line 9), an iterative free line search via quadratic approximation by a second order Taylor series polynomial is performed (Equation (11)). Unfortunately, the derivatives of
must be calculated via numerical differences, as the extended FMU 2.0 co-simulation interface only supports directional derivatives with respect to the system states and inputs (see [
6]—Section 2.1.9). Note that the necessary determination of
in the differential quotient causes only evaluations of the algebraic output equations of the FMI (cf. Equation (9)), as the calculation of the initial guess
is only performed once in this approach.
In step 4 (line 10), the actual optimization step, , is computed. Finally, in the last step, it is checked whether the stop criterion has been reached. This can be, on the one hand, with a criterion that controls whether the change in the last iteration, , is small , and, on the other hand, a real-time constraint that stops the search in order to guarantee the cycle-time of the real-time system. In this case, it is assumed that the initial guess (), calculated by the high fidelity Modelica model, has been already a valid suboptimal solution, and the iterations of the NG did further improve it (cf. Algorithm 2), before the stop ().
3.2. Moving Horizon Estimation Algorithm Extensions
Here, for the analyzed ESTM MHE observer, different extensions are discussed, in comparison to the nominal MHE algorithm formulation in
Section 3. First, a computationally reliable method is introduced for the calculation of the prediction model and the observer constraints, by means of two multi-rate extended FMUs 2.0 for co-simulation (cf. [
2,
6,
26]). It enables enlarging the sampling time of the observer, inspite of the fact that the constraint calculation needs to be executed in a 50 times faster sampling rate, which gives large benefits to the real-time capability. Second, advanced methods for the coupling of discrete optimization variables are proposed. These enforce the physical coupling of the discrete tuner states (
) to overcome an unrealistic solution of the state trajectory. Third, a heuristic method is discussed to prevent optimization freezing through intelligent recalculation of the reference trajectory (
) in segments where no measurements are available.
3.2.1. Constraint Evaluation with a Multi-Rate FMU Model Splitting Concept
The first implementations of the constrained observer were based on a single prediction FMU that combined the ESTM prediction model (
Section 3) and the boundary constraint evaluation (
Section 2.2). To separate the estimated states from the state of the constraint evaluation (the path parameter
), Modelica’s logical vector indexing feature was used. However, a simulation experiment analysis showed that in this configuration, it is necessary to run the whole estimator with a fast sampling rate of
. This is due to the fast dynamics of the control loop to determine the current path parameter (
) in the constraint calculation module (cf.
Section 2.2). To overcome this issue, the ESTM and the boundary constraint (BC) model were split into two separate FMUs with different sample times (
). The connection of the multi-rate FMUs and the estimation algorithm are sketched in
Figure 10. Through the model splitting, the states of the ESTM FMU (
are the inputs of the boundary constraints of FMU, which only has one state, the corresponding path parameter
. The sample time of the constrained FMU is
times higher than the one of the ESTM, so as to guarantee numerical stability.
denotes the permutation matrix between the inputs of the BC FMU and the states of the ESTM FMU.
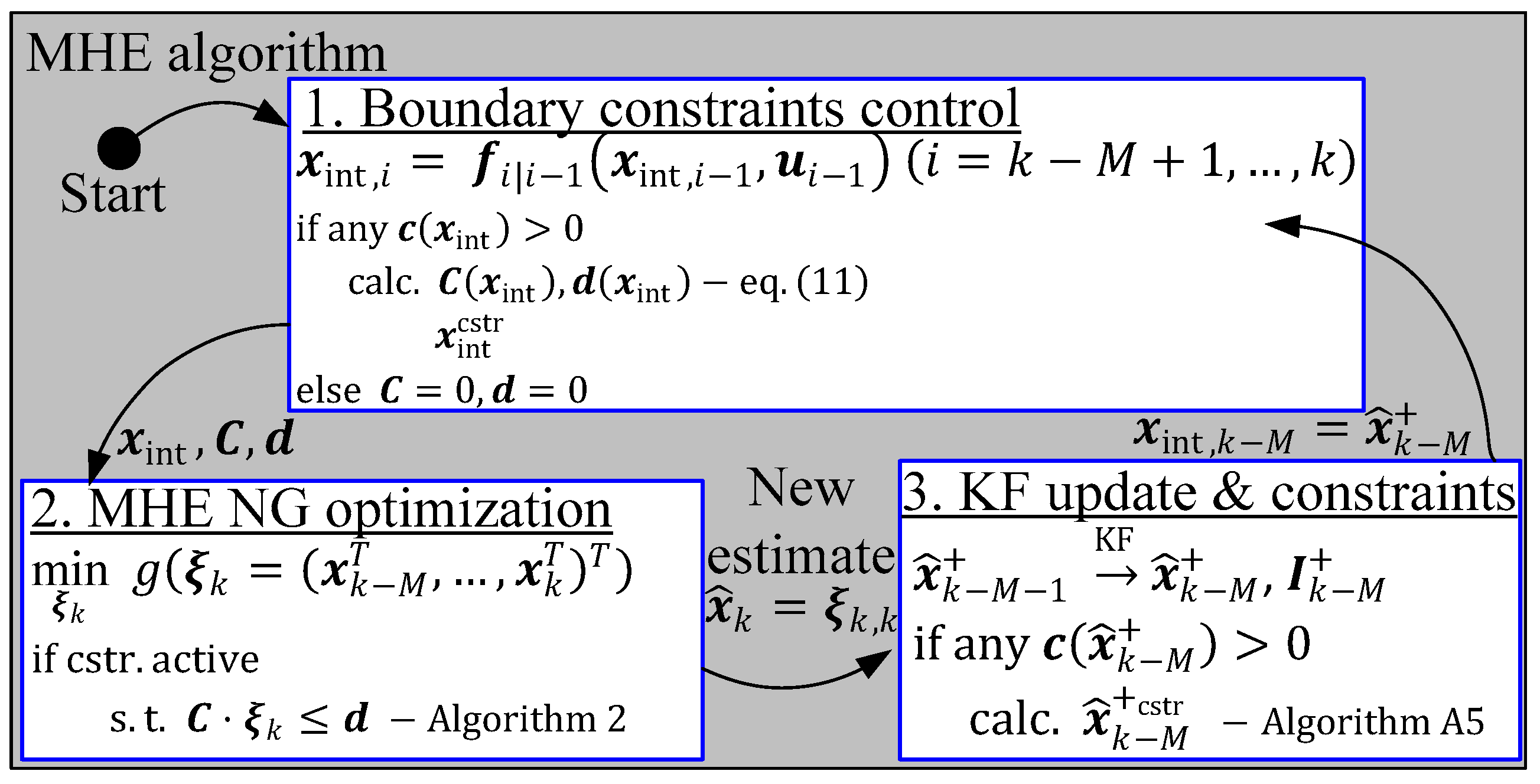
With this implementation, all of the necessary quantities for the constrained MHE are nested within the multi-rate FMU block, whose interfaces to the outside (denoted with blue arrows) are the same as if no inner model separation was performed. This gives a large benefit in the matter of computational effort, not only caused by the larger integration step, but it also enables the possibility to calculate the constraint only if it is necessary for the estimation algorithm. This benefit is shown in the following simplified flow diagram of the extended MHE algorithm proposed here (see
Figure 11). By means of a forward integration in step 1 from
to
, it is checked whether any constraint may be potentially activated (
) and if so, the constraints are linearized along the open loop state trajectory. In step 2, the nonlinear gradient algorithm performs the optimization over the estimation window, incorporating the linearized constraints if necessary. In the last step, step 3, the Kalman filter is updated with the consideration of the system constraints to guarantee that the initial state of the moving window in the next iteration step lies within the feasible region.
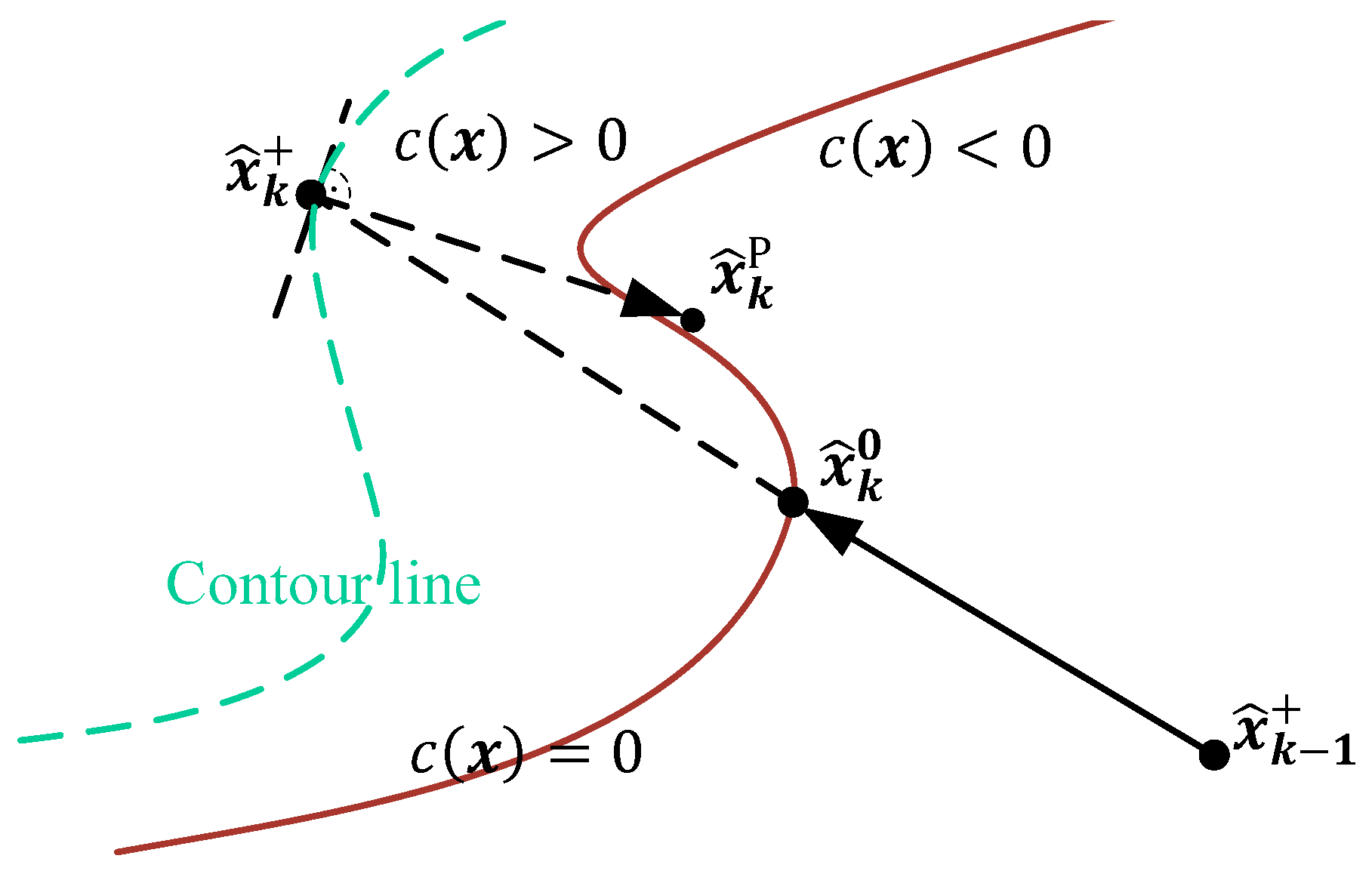
Qualitatively, the incorporation of the constraints is depicted in
Figure 12. The feasible region of the constraint is limited through the function of
and
(orange-dotted). In this example, the state propagation of the Kalman filter (step 3) causes a violation of
, and therefore, the a posteriori propagated state must be constrained by a method (e.g., state constraint projection in
Appendix B. The boundary constraints control (step 1) now starts with the corrected a posteriori estimate,
, and detects a constraint violation between the third and fourth sample point. This is only possible as the BC model is integrated fifty times between every ESTM evaluation and correction step. To guarantee that the initial solution of the NG solver lies in the feasible region, the
is limited via the simplified Newton descent search, as described in
Appendix B.
3.2.2. Multiple Shooting Inspired Optimization Objective Extension
In the original MHE problem formulation (Equation (8) to Equation (10)), the discrete system states within the moving window
are not coupled with each other between the sample points (
). This implies that the optimization algorithm does not have any information about the dynamic behavior of the ESTM prediction model between the sample points within the estimation window. In the case of the ESTM, with a large sample time
, this may lead to a physically unfeasible set
, which however minimizes the optimization criteria. A consideration to overcome this weak point is the introduction of coupling penalty terms between the time instances in the minimization criterion in Equations (9) and (10).
Figure 13 exemplifies the approach developed here, namely: the initial open loop integration from the time instance
to the current time instance
is denoted as
. The set of optimized state vectors
in the
-th NG descent step (cf. Algorithm 2) is marked with green circles.
The temporal evolution from these discrete states by means of the FMU yields a set of system states
denoted with a red circle, as follows:
In the depicted qualitative example (cf.
Figure 13), one can see, that through the evolution of the optimization process a displacement
is caused in the
j-th iteration step of the NG algorithm (see Algorithm 2). To minimize this gap, the MHE optimization objective is changed to the following:
In comparison to the original formulation, the quality functional is extended with an additional weighted least squares expression so as to enforce a stronger coupling of the piecewise integration () and the optimized stated vector () by means of the user tunable weighting matrix ().
Besides performing the integration () by means of the FMU (Equation (12)), it is necessary to approximate the integration rule for the gradient calculation. It is proposed that it is more important to generate a good approximated descent direction for the optimizer than the exact reproduction of the integration method used in the FMU.
In the simplest case, this is achieved by the consideration of the directional derivative at the past instance (later called V1). In the second version (V2), the integrator is approximated as an Euler 1 integration rule. The last optimization variable coupling approximation is formulated by a trapezoid integration rule (V3), as follows:
With these three versions, the complete extended MHE gradient computation is given in Algorithm 4. Comparing this gradient calculation to the original formulation in Algorithm 3, the main difference is the additional “for loop” with the index
, in which the operator ± denotes that all of the values are additively added to the existing entries from the earlier loop.
| Algorithm 4. Multiple shooting MHE gradient calculation |
| Define: ; |
| Define: |
|
| for to do |
| |
| if version == V3 then |
| |
| end if |
| end for |
| Define: |
| for to do |
| |
| switch(version) |
| case V1: |
| |
| case V2: |
| |
| case V3: |
| |
| end switch |
| end for |
3.2.3. Multi-Rate, Triggered, or Delayed Measurements in MHE
For the nonlinear MHE approach of
Section 3, it is proposed to keep the lagged sensor data in a ring buffer, to interconnect them with past measurements of non-lagged sensors, and to index the active sensors at the particular time instance. Comparing this with the formulation of Equation (9), all of the expressions that are connected with the measured output (the middle part) have to be calculated separately in each time step so as to incorporate the changing amount of available sensor information at the dedicated time step.
In Equation (15), all of the active measurements are denoted with an additional subscript (
) for the active sensors. In the construction of the active measurement matrix (
), the time-delays of the single sensors are already considered. To cope with the varying dimensions in the optimization problem, the implementation could utilize the vector indexing feature in the Modelica language. The same technique is used in the Kalman filter propagation (cf. Algorithm 1) for the reduced indexed measurements. This procedure is valid according to the Kalman theory, and can be seen in an analogy to sequential Kalman filtering (see [
10] – Section 6.1). In these implementations, the matrix vector notation of the Kalman filter algorithm is replaced by sequentially solving a scalar problem for each measurement. Therefore, more sensor information can improve the estimation in the sense of minimizing the covariance,
. In the case that less sensor information is available, larger values of
) occur, but the validity of the Kalman theory still holds. In the same manner, the dimension of the available measurements at
for the calculation of the information matrix
and the initial guess
also needs to be considered in the Kalman step.
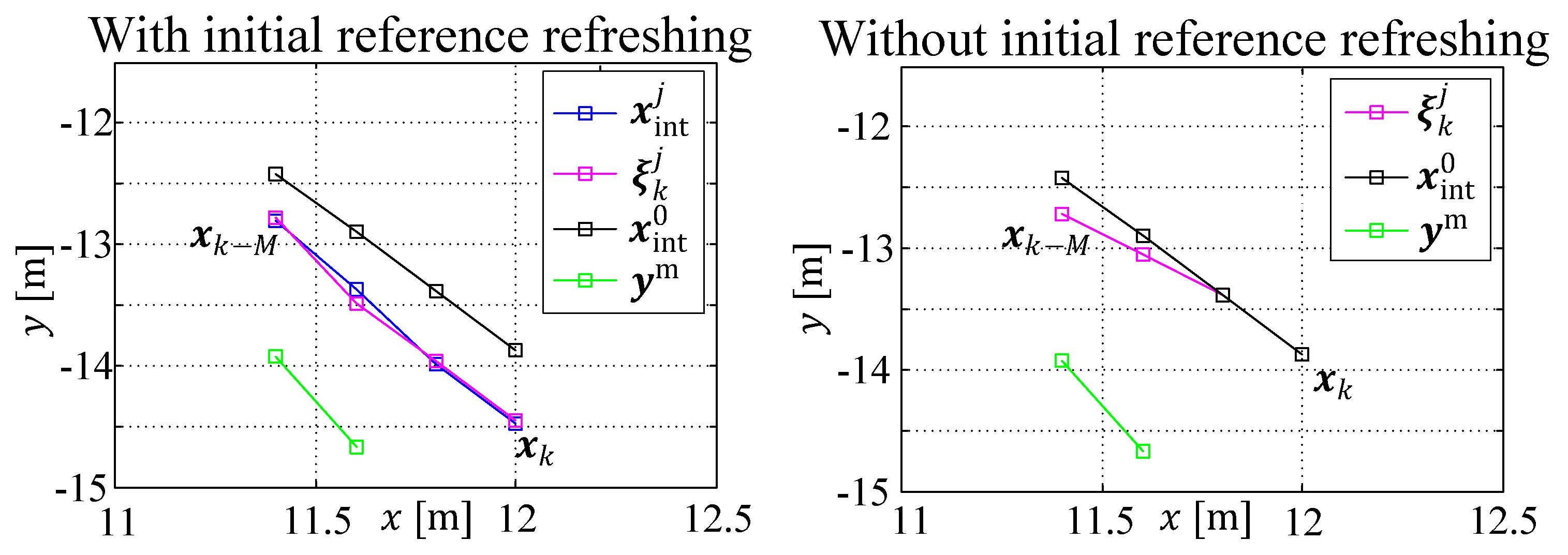
3.2.4. Adaptive Initial Reference Refreshing for Delayed Measurements
In
Section 3.2.3, a theory extension to MHE is given that enables the assignment of measurements to their particular time instance by intelligent measurement storage and temporal activation indexing. In
Figure 14, the measurement signal
is schematically sketched, which is only available at the time instances highlighted with a yellow flash. For example, between time instances
and
, no new measurement information is available.
Different algorithm experiments have shown that this may force the NG optimizer to tune the variable
towards the initial guess of the open loop state trajectory (
). To overcome this very conservative solution, a heuristic method is introduced in Equation (16) to refresh
after the optimization step (line 10 in Algorithm 2). It determines the gaps in the logical vector indexing matrix of the active measurements
and integrates from the last time instance where all of the measurements are available, as follows:



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















