Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics


Abstract
:1. Introduction
2. The Theoretical Basis of the Magnetic Machine Coupling Model for the Giant Magnetostrictive Actuator (GMA)
2.1. The Fundamental Theory of the Magnetic Field Excited by the Winding for GMA
2.2. The Fundamental Theory of the Mechanical Field of GMA
2.3. The Conversion of the Weak Form Solution
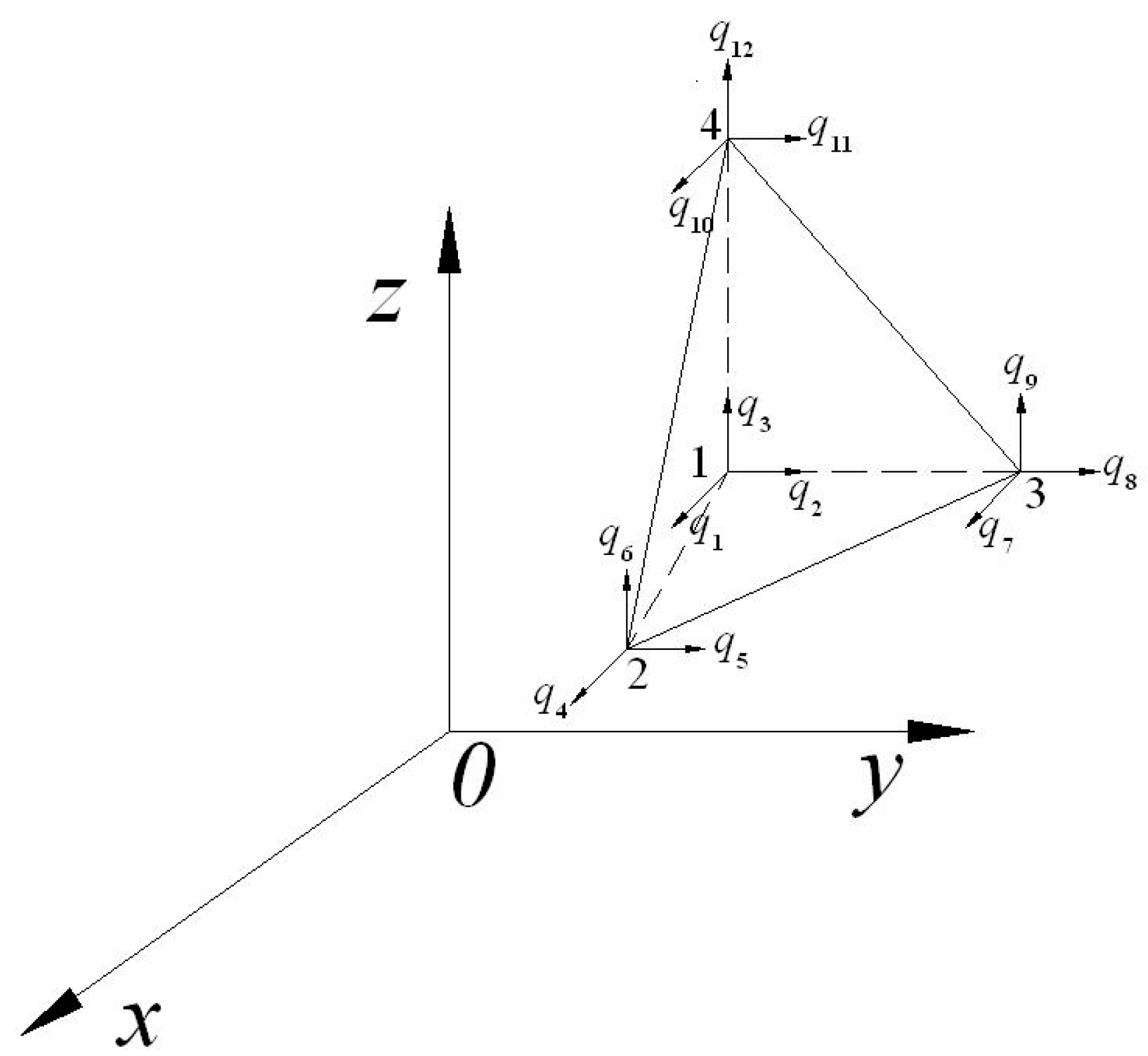
2.4. Three-Dimensional Finite Element Discrimination of Virtual Work Model for the System
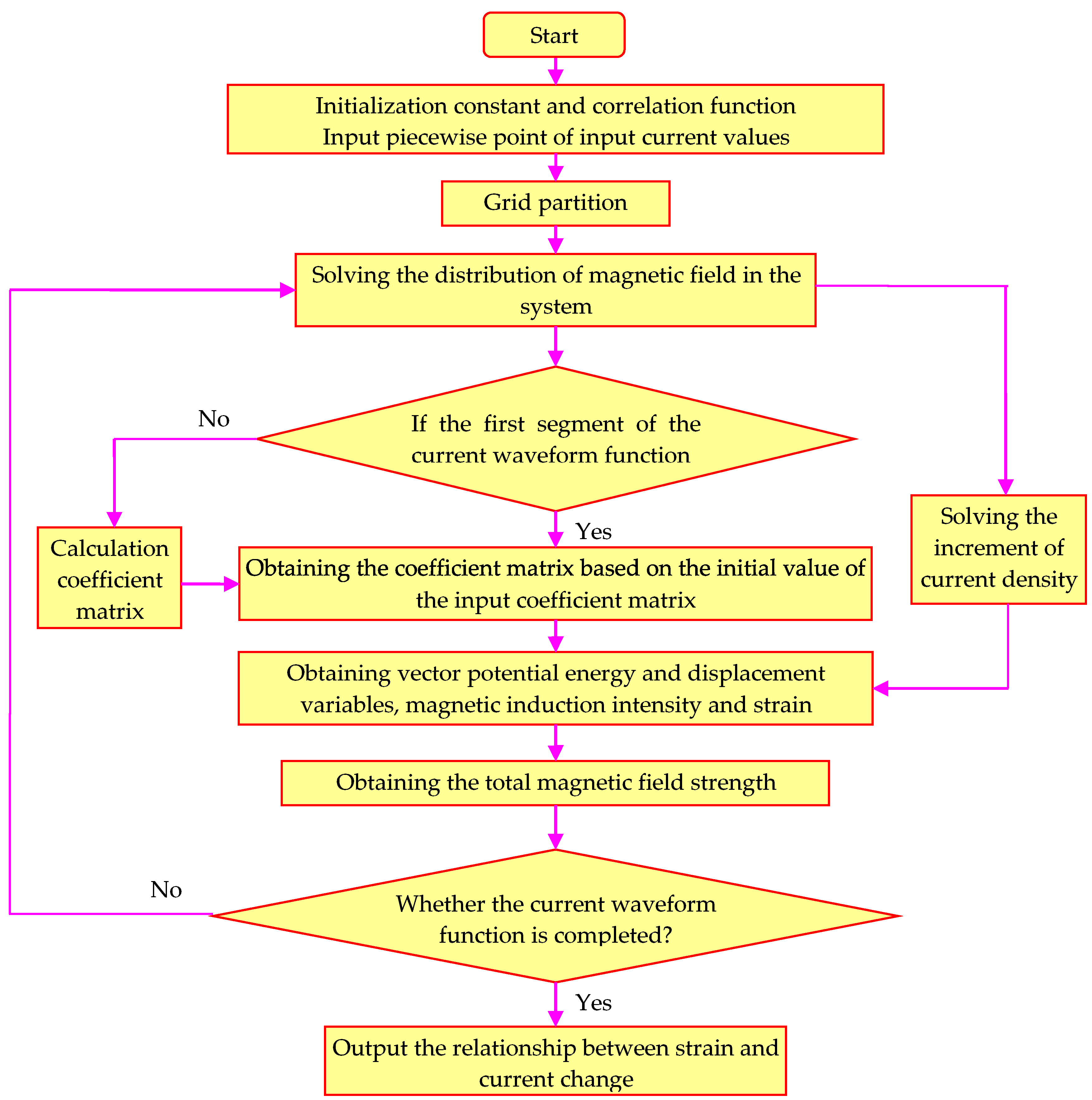
2.5. Magneto Mechanical Coupling Nonlinear Model
3. Calculation of the Coupling Model of Giant Magnetostrictive Actuator (GMA)
3.1. The Structure and Working Principle of the Giant Magnetostrictive Actuator
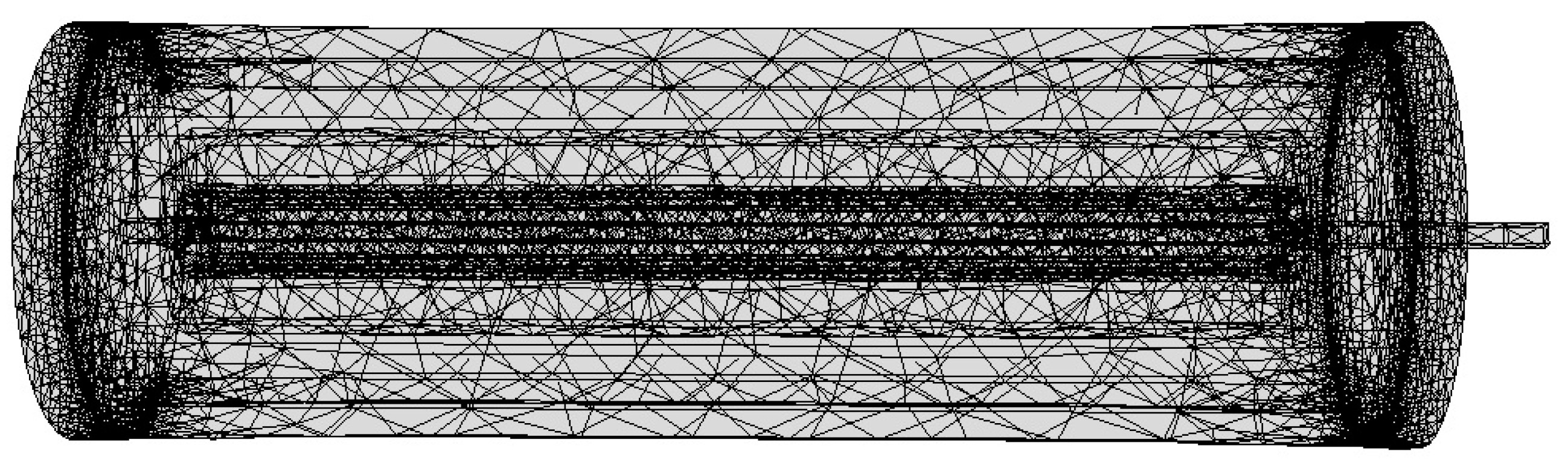
3.2. Finite Element Simulation of the Coupling Model of Giant Magnetostrictive Actuator (GMA)
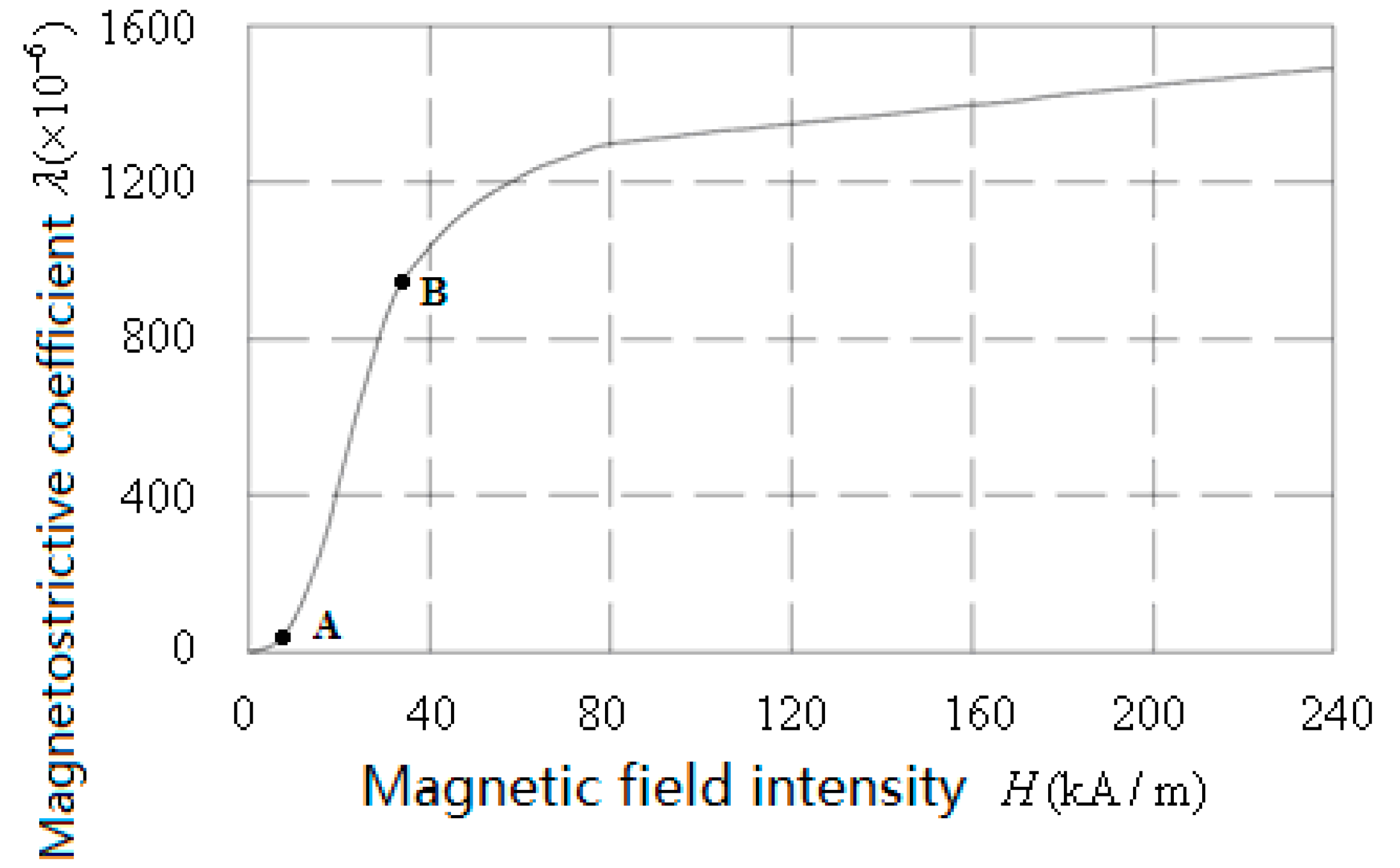
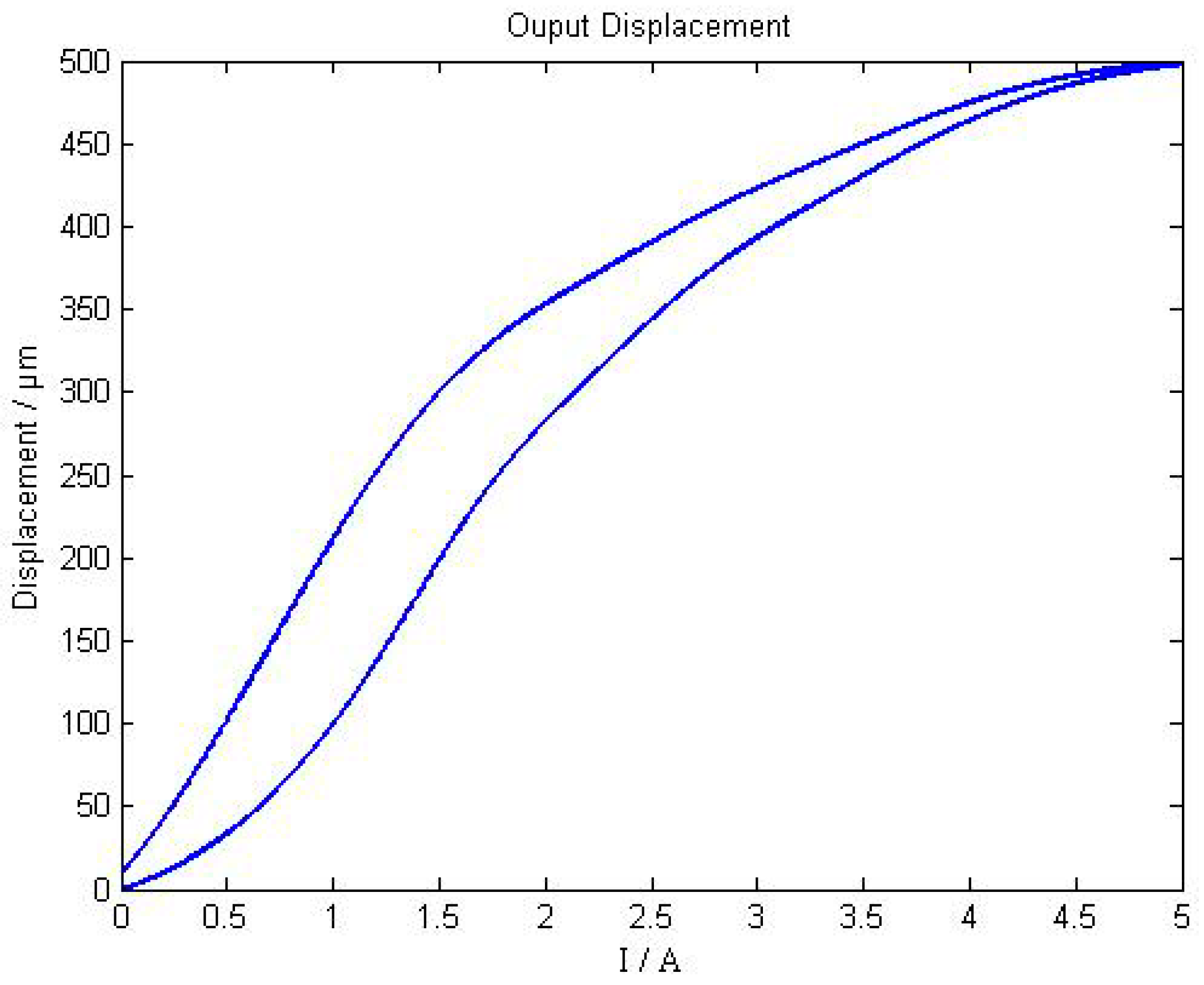
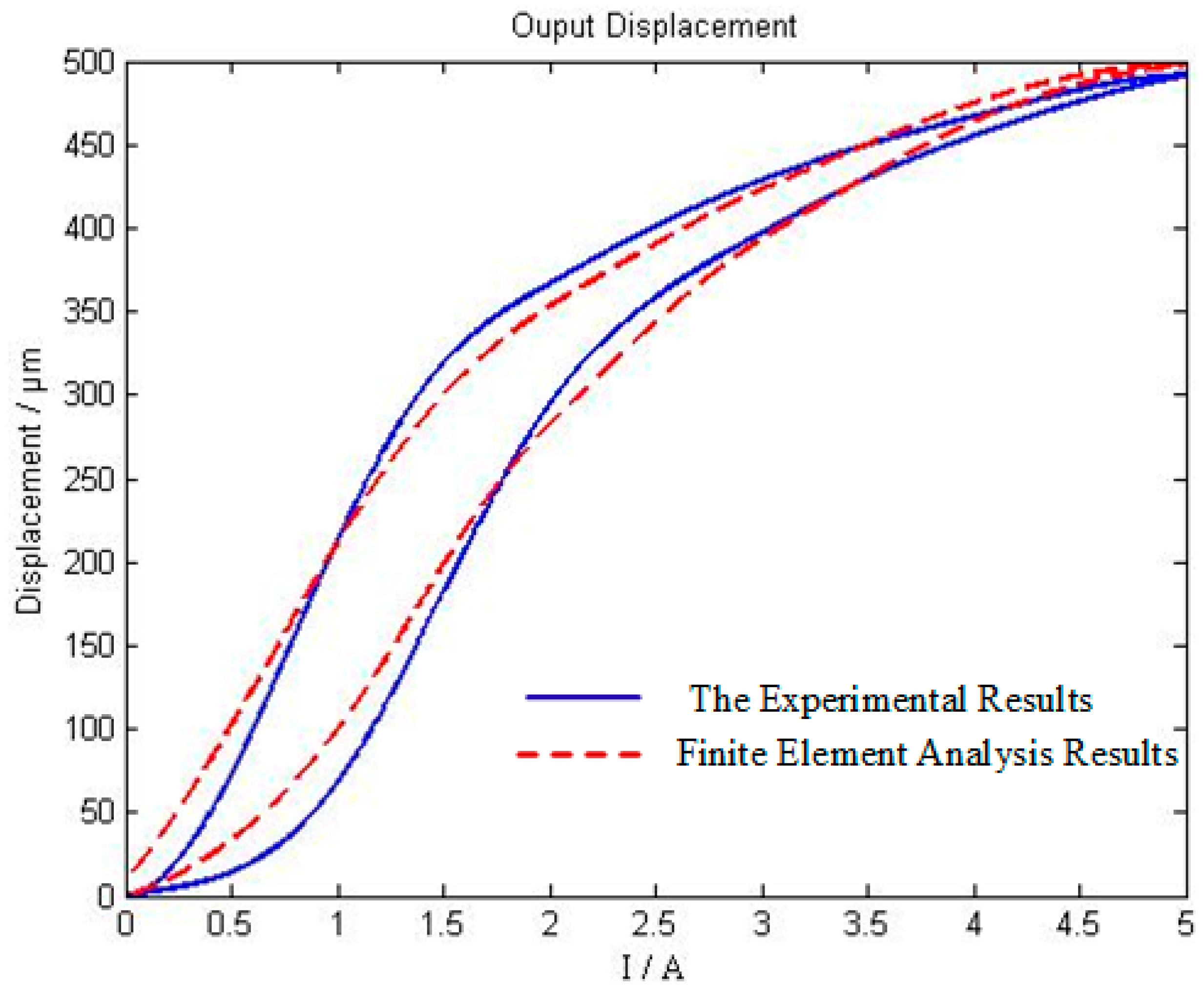
3.3. Simulation Result of Magneto Mechanical Coupling Model of Giant Magnetostrictive Actuator (GMA)
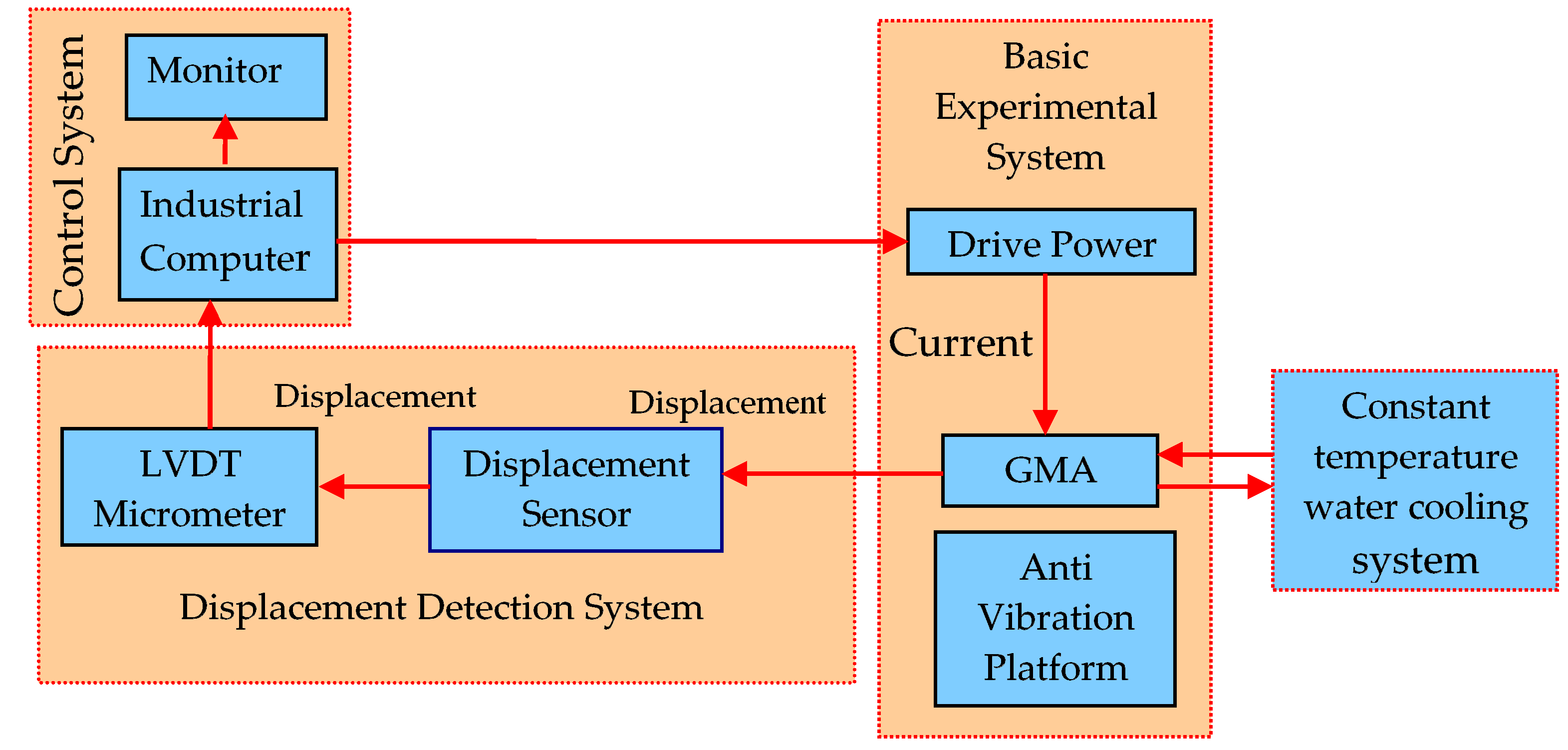
4. Testing and Experimental Research on Giant Magnetostrictive Actuator
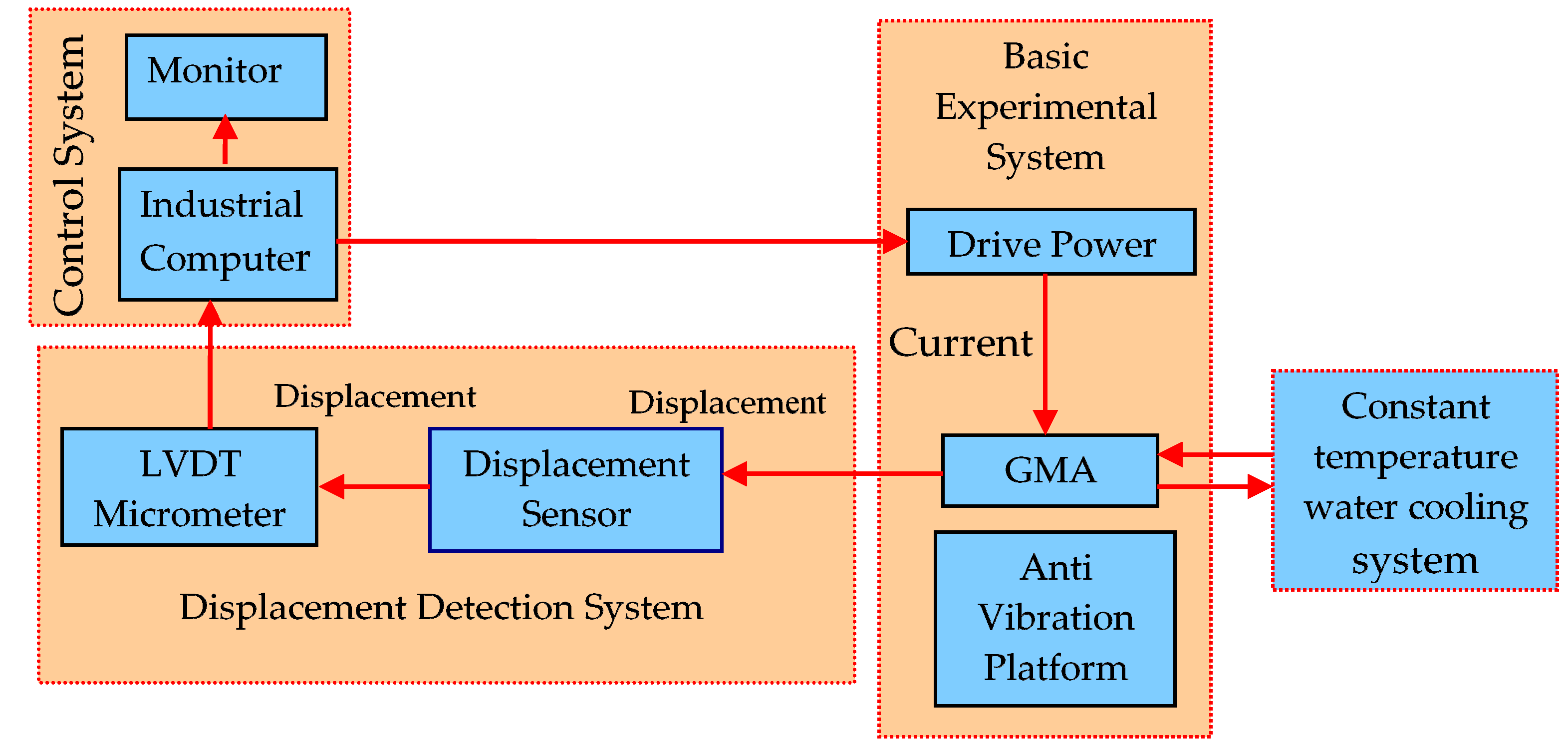
4.1. Experimental Platform
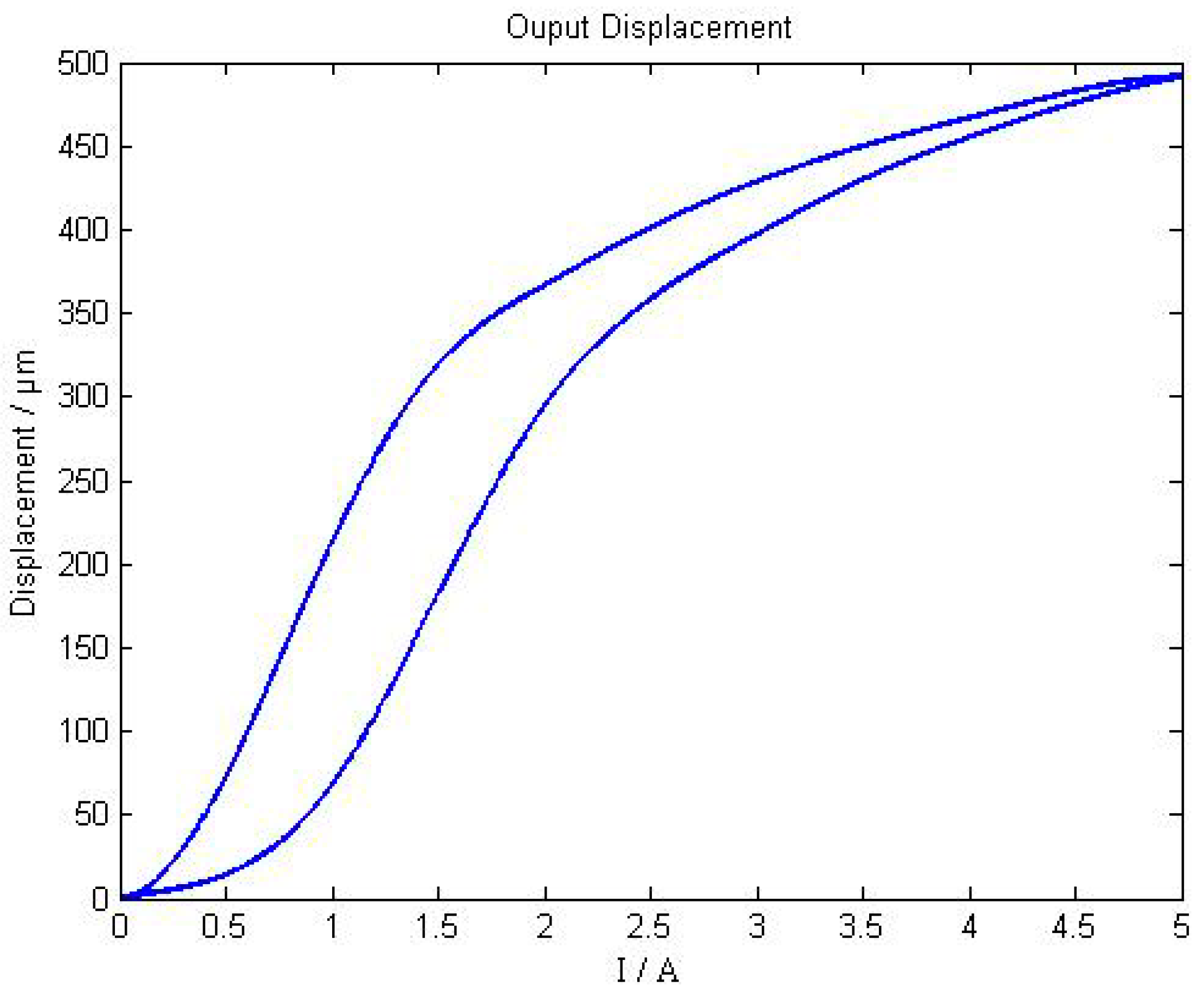
4.2. Experimental Research on Giant Magnetostrictive Actuator
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Park, G.; Bement, M.T.; Hartman, D.A.; Smith, R.E.; Farrar, C.R. The use of active materials for machining processs: A review. Int. J. Mach. Tools Manuf. 2007, 47, 2189–2206. [Google Scholar] [CrossRef]
- Schellekens, P.; Rosielle, N.; Vermeulen, H.; Vermeulen, M.; Wetzels, S.; Pril, W. Design for precision: Current status and trends. Ann. CIRP 1997, 47, 557–586. [Google Scholar] [CrossRef]
- Liang, S.Y.; Hecker, R.L.; Landers, R.G. Machining process monitoring and control: The state of the art. ASME J. Manuf. Sci. Eng. 2004, 126, 297–310. [Google Scholar] [CrossRef]
- Srinivasan, S.; McFarland, M. Smart Structure: Analysis and Design; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- Chopram, I. Review of state of art of smart structures and integrated systems. AIAA J. 2002, 40, 2145–2187. [Google Scholar] [CrossRef]
- Inman, D.J. Smart materials in damage detection and prognosis. In Proceedings of the Fifth International Conference on Damage Assessment of Structures, Southampton, UK, 1–3 July 2003; pp. 3–16. [Google Scholar]
- Luo, M.; Li, W.; Wang, J.; Wang, N.; Chen, X.; Song, G. Development of a Novel GuidedWave Generation System Using a Giant Magnetostrictive Actuator for Nondestructive Evaluation. Sensors 2018, 18, 779. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z.; Yang, X.; Guo, D.; Hou, L. Theories and Methods of Designing Microdisplacement Actuator Based on Giant Magnetostrictive Materials. Chin. J. Mech. Eng. 2001, 37, 46–49. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, L.; Tan, J.; Zhao, B. Induced Voltage Linear Extraction Method Using an Active Kelvin Bridge for Disturbing Force Self-Sensing. Sensors 2016, 16, 739. [Google Scholar] [CrossRef] [PubMed]
- Luo, M.; Li, W.; Wang, B.; Fu, Q.; Song, G. Measurement of the Length of Installed Rock Bolt Based on StressWave Reflection by Using a Giant Magnetostrictive (GMS) Actuator and a PZT Sensor. Sensors 2017, 17, 444. [Google Scholar] [CrossRef] [PubMed]
- Jenner, A.G.; Smith, R.J.E.; Wilkinson, A.J. Actuation and transduction giant magnetostrictive alloys. Mechatronics 2000, 10, 457–466. [Google Scholar] [CrossRef]
- Lacheisserie, E.D.T.D. Magnetostriction Theory and Applications of Magnetoelasticity; CRC Press, Inc.: Boca Raton, FL, USA, 1993. [Google Scholar]
- Yang, Z.; He, Z.; Yang, F.; Rong, C.; Cui, X. Design and analysis of a voltage driving method for electro-hydraulic servo valve based on giant magnetostrictive actuator. Int. J. Appl. Electromagnet. Mech. 2018, 57, 439–456. [Google Scholar] [CrossRef]
- Guo, Y.; Mao, J.; Zhou, K. Rate-Dependent Modeling and H∞ Robust Control of GMA Based on Hammerstein Model With Preisach Operator. IEEE Trans. Control Syst. Technol. 2015, 23, 2432–2439. [Google Scholar] [CrossRef]
- Zhang, Z.; Ma, Y.; Guo, Y. A Novel Nonlinear Adaptive Filter for Modeling of Rate-Dependent Hysteresis in Giant Magnetostrictive Actuators. In Proceedings of the 2015 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 670–675. [Google Scholar]
- Clark, A.E. Magnetostrictive Rare Earth-Fe2 Compounds; Wohlfarh, E.P., Ed.; North-Holland Publishing Company: New York, NY, USA, 1980. [Google Scholar]
- Benbouzid, M.E.H.; Reyne, G.; Meunier, G.; Kvarnsjo, L.; Engdahl, G. Dynamic modelling of giant magnetostriction in Terfenol-D rods by the finite element method. IEEE Trans. Magnet. 1995, 31, 1821–1824. [Google Scholar] [CrossRef]
- Pawel, I.; Krzysztof, K.; Lech, N.; Ƚukasz, K. FE transient analysis of the magnetostrictive actuator. Int. J. Appl. Electromagnet. Mech. 2016, 51, S81–S87. [Google Scholar]
- Azoum, K.; Besbes, M.; Bouillault, F. 3D FEM of magnetostriction phenomena using coupled constitutive laws. Int. J. Appl. Electromagnet. Mech. 2004, 19, 367–371. [Google Scholar]
- Benatar, J.G. Fem Implementations of Magnetostrictive-Based Applications. Master’s Thesis, University of Maryland, College Park, MD, USA, 2005. [Google Scholar]
- Zhao, Z.; Wu, Y.; Gu, X.; Xu, J.; Ge, R. Three-dimensional nonlinear dynamic finite element model for giant magnetostrictive actuators. J. Zhejiang Univ. 2008, 42, 203–208. [Google Scholar]
- Zhong, W. Ferromagnetism, 2nd ed.; Science Press: Beijing, China, 1992. [Google Scholar]
- Yuan, L.; Hu, Q. A Plane Wave Discontinuous Petrov-Galerkin Method for Helmholtz Equation and Time-harmonic Maxwell Equations with Complex Wave Numbers. J. Numer. Methods Comput. Appl. 2015, 36, 185–196. [Google Scholar]
- Hou, X.; Fan, Z.; Gu, Y.; Yang, H. A Wavelet Interpolation Galerkin Algorithm for Static Electromagnetic Field Analysis in Irregular Regions. Chin. J. Comput. Phys. 2005, 22, 539–548. [Google Scholar]
- Kannan, K.S.; Dasgupta, A. A nonlinear Galerkin finite-element theory for modeling magnetostrictive smart structure. Smart Mater. Struct. 1997, 6, 341–350. [Google Scholar] [CrossRef]
- Jia, Z.; Guo, D. Principle and Application of Micro-Displacement Actuator for Giant Magnetostrictive Materials; Science Press: Beijing, China, 2008. [Google Scholar]
- Claeyssen, F.; Lhermet, N.; Le Letty, R.; Bouchilloux, P. Actuators transducers and motors based on giant magnetostrictive materials. J. Alloys Compd. 1997, 258, 61–73. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electric Current (A) | Output Displacement (μm) | Error (%) | |
|---|---|---|---|
| Finite Element Simulation Results | Experimental Results | ||
| 0 | 0 | 0 | 0 |
| 0.5 | 27.94 | 14.61 | 47.71 |
| 1 | 92.65 | 67.52 | 27.12 |
| 1.5 | 205.88 | 182.65 | 11.28 |
| 2 | 282.35 | 293.99 | 3.96 |
| 2.5 | 348.53 | 358.52 | 2.79 |
| 3 | 398.53 | 397.4 | 0.28 |
| 3.5 | 432.35 | 430.27 | 0.48 |
| 4 | 466.18 | 455.42 | 2.31 |
| 4.5 | 493.12 | 475.99 | 3.47 |
| 5 | 498.09 | 491.63 | 1.30 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, Z.; Wang, T.; Zhou, M. Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics. Sensors 2018, 18, 3070. https://doi.org/10.3390/s18093070
Yu Z, Wang T, Zhou M. Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics. Sensors. 2018; 18(9):3070. https://doi.org/10.3390/s18093070
Chicago/Turabian StyleYu, Zhen, Tao Wang, and Min Zhou. 2018. "Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics" Sensors 18, no. 9: 3070. https://doi.org/10.3390/s18093070
APA StyleYu, Z., Wang, T., & Zhou, M. (2018). Study on the Magnetic-machine Coupling Characteristics of Giant Magnetostrictive Actuator Based on the Free Energy Hysteresis Characteristics. Sensors, 18(9), 3070. https://doi.org/10.3390/s18093070