Magnetic Noise Prediction and Evaluation in Tunneling Magnetoresistance Sensors


Abstract
1. Introduction
2. Methods
3. Results
3.1. Sensors Noise
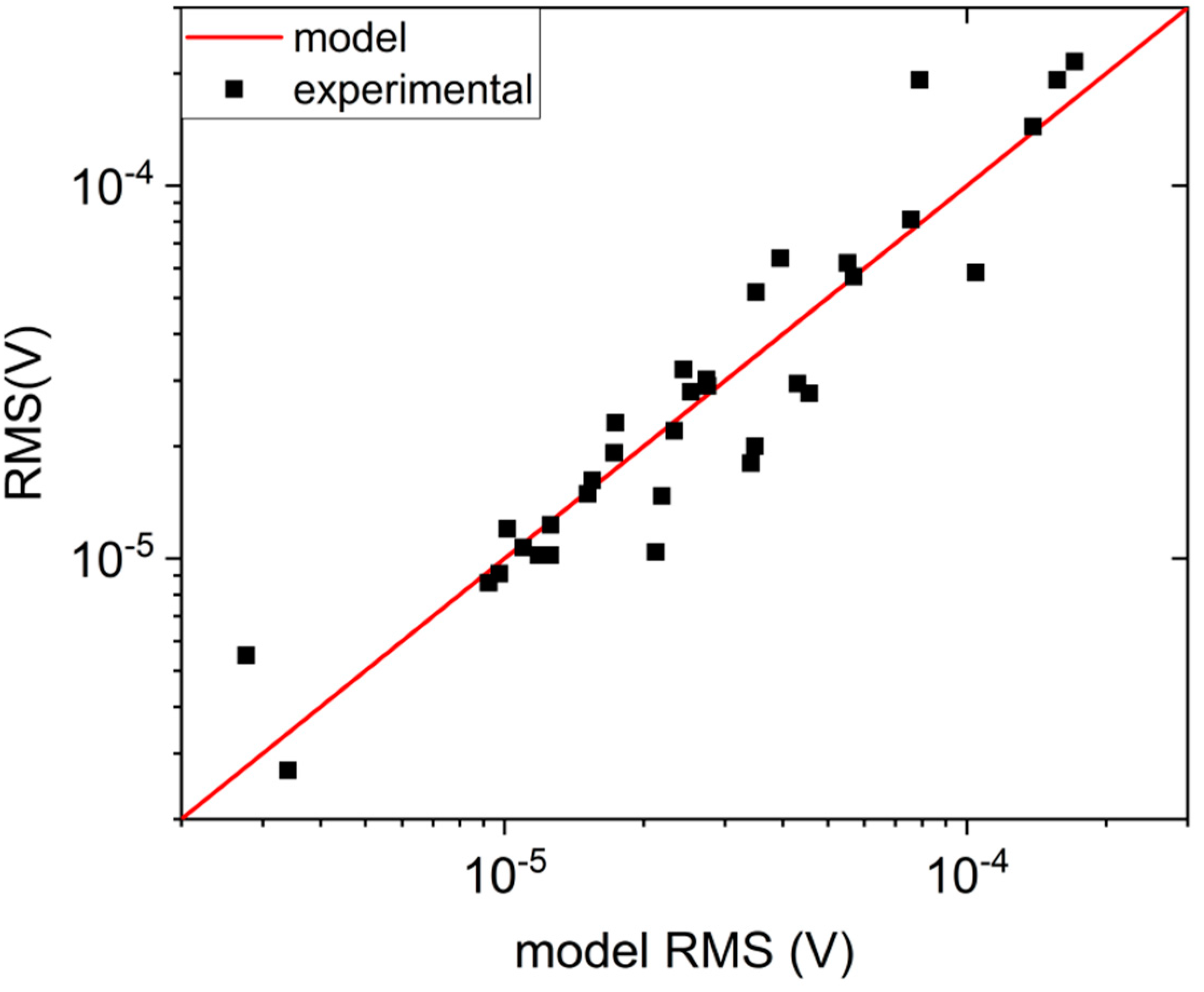
3.2. Noise Prediction and Evaluation
- (1).
- Gather information about R0 (Ω), ΔR (Ω), FS (V/T) and Ib (mA) from the experimental data. Typically, the last two quantities will be available in an explicit form. The first two may be intertwined with other parameters and available either only as information about resistances of parallel and anti-parallel state (RP and RAP) or as information about minimal and maximal voltage levels on the U(H) curve (Umin and Umax, respectively). In that case, one can recall that in our model R0 = (RAP + RP)/2 = (Umax + Umin)/(2·Ib) and ΔR = (RAP − RP)/2 = (Umax − Umin)/(2·Ib).
- (2).
- Use Equation (4a) and (4b) to calculate A1/f as well as Awhite values. It is important to note that these equations are given in a form where all variables are logarithmized using logarithm with base 10.
- (3).
- Normalize the calculated A1/f and Awhite values, dividing them by the sensing layer volume Ω expressed in μm3 units.
- (4).
- Use the obtained A1/f and Awhite together with Equation (7) to calculate VRMS.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | R0 (Ω) | ΔR (Ω) | FS (V/T) | Ib (mA) | Ω (μm3) | A1/f | Awhite | log10 (R0) | log10 (ΔR) | log10 (FS) | log10 (Vb) | log10 (A1/f) | log10 (Awhite) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 6250 | 1250 | 1.9 | 0.008 | 0.029 | 8.02 × 10−4 | 1.79 × 10−3 | 3.80 | 3.10 | 0.28 | 1.70 | −3.10 | −2.75 |
| 2 | 6200 | 1200 | 3.8 | 0.017 | 0.029 | 6.17 × 10−4 | 9.87 × 10−4 | 3.79 | 3.08 | 0.58 | 2.02 | −3.21 | −3.01 |
| 3 | 5650 | 1150 | 22 | 0.09 | 0.041 | 1.36 × 10−3 | 9.26 × 10−4 | 3.75 | 3.06 | 1.34 | 2.71 | −2.87 | −3.03 |
| 4 | 5600 | 800 | 11 | 0.054 | 0.029 | 4.13 × 10−4 | 5.06 × 10−4 | 3.75 | 2.90 | 1.04 | 2.48 | −3.38 | −3.30 |
| 5 | 3950 | 825 | 1.65 | 0.0125 | 0.042 | 5.74 × 10−4 | 8.64 × 10−4 | 3.60 | 2.92 | 0.22 | 1.69 | −3.24 | −3.06 |
| 6 | 3800 | 400 | 25 | 0.21 | 0.029 | 4.50 × 10−4 | 6.05 × 10−4 | 3.58 | 2.60 | 1.40 | 2.90 | −3.35 | −3.22 |
| 7 | 3700 | 650 | 7.6 | 0.08 | 0.042 | 3.27 × 10−4 | 4.07 × 10−4 | 3.57 | 2.81 | 0.88 | 2.47 | −3.49 | −3.39 |
| 8 | 3400 | 500 | 10.4 | 0.15 | 0.042 | 3.33 × 10−4 | 8.64 × 10−4 | 3.53 | 2.70 | 1.02 | 2.71 | −3.48 | −3.06 |
| 9 | 1925 | 375 | 1.55 | 0.027 | 0.16 | 4.01 × 10−4 | 1.30 × 10−3 | 3.28 | 2.57 | 0.19 | 1.72 | −3.40 | −2.89 |
| 10 | 1925 | 375 | 1.52 | 0.027 | 0.16 | 3.46 × 10−4 | 9.26 × 10−4 | 3.28 | 2.57 | 0.18 | 1.72 | −3.46 | −3.03 |
| 11 | 1900 | 350 | 3.1 | 0.054 | 0.16 | 3.46 × 10−4 | 9.26 × 10−4 | 3.28 | 2.54 | 0.49 | 2.01 | −3.46 | −3.03 |
| 12 | 1900 | 350 | 2.83 | 0.055 | 0.16 | 2.53 × 10−4 | 8.02 × 10−4 | 3.28 | 2.54 | 0.45 | 2.02 | −3.60 | −3.10 |
| 13 | 1700 | 250 | 14.1 | 0.3 | 0.16 | 2.78 × 10−4 | 6.79 × 10−4 | 3.23 | 2.40 | 1.15 | 2.71 | −3.56 | −3.17 |
| 14 | 1700 | 250 | 9.2 | 0.32 | 0.16 | 1.48 × 10−4 | 3.02 × 10−4 | 3.23 | 2.40 | 0.96 | 2.74 | −3.83 | −3.52 |
| 15 | 1525 | 225 | 6 | 0.33 | 0.16 | 2.78 × 10−4 | 2.47 × 10−4 | 3.18 | 2.35 | 0.78 | 2.70 | −3.56 | −3.61 |
| 16 | 1150 | 125 | 23.6 | 0.89 | 0.16 | 1.48 × 10−4 | 5.31 × 10−4 | 3.06 | 2.10 | 1.37 | 3.01 | −3.83 | −3.28 |
| 17 | 1020 | 100 | 10.1 | 0.98 | 0.16 | 8.64 × 10−5 | 1.79 × 10−4 | 3.01 | 2.00 | 1.00 | 3.00 | −4.06 | −3.75 |
| 18 | 315 | 15 | 0.3 | 1.55 | 0.56 | 6.97 × 10−5 | 5.18 × 10−4 | 2.50 | 1.18 | −0.52 | 2.69 | −4.17 | −3.29 |
| 19 | 110 | 25 | 127 | 4.5 | 0.92 | 1.30 × 10−3 | 1.60 × 10−3 | 2.04 | 1.40 | 2.10 | 2.69 | −2.89 | −2.79 |
| 20 | 107.5 | 22.5 | 110 | 4.8 | 0.92 | 2.72 × 10−4 | 1.36 × 10−3 | 2.03 | 1.35 | 2.04 | 2.71 | −3.57 | −2.87 |
| 21 | 105 | 20 | 58 | 4.6 | 0.92 | 1.54 × 10−4 | 9.26 × 10−4 | 2.02 | 1.30 | 1.76 | 2.68 | −3.81 | −3.03 |
| 22 | 102.5 | 22.5 | 120 | 5.2 | 0.92 | 1.05 × 10−3 | 1.17 × 10−3 | 2.01 | 1.35 | 2.08 | 2.73 | −2.98 | −2.93 |
| 23 | 100 | 15 | 12.7 | 5 | 0.92 | 7.40 × 10−5 | 4.13 × 10−4 | 2.00 | 1.18 | 1.10 | 2.70 | −4.13 | −3.38 |
| 24 | 100 | 15 | 6.5 | 5.1 | 0.92 | 2.47 × 10−5 | 3.09 × 10−4 | 2.00 | 1.18 | 0.81 | 2.71 | −4.64 | −3.51 |
| 25 | 100 | 15 | 2.7 | 4.9 | 0.92 | 3.09 × 10−5 | 1.85 × 10−4 | 2.00 | 1.18 | 0.43 | 2.69 | −4.56 | −3.73 |
| 26 | 90 | 25 | 23.3 | 0.55 | 3.61 | 1.48 × 10−4 | 7.40 × 10−4 | 1.95 | 1.40 | 1.37 | 1.69 | −3.83 | −3.13 |
| 27 | 72.5 | 12.5 | 158 | 6.6 | 3.61 | 4.75 × 10−4 | 3.76 × 10−4 | 1.86 | 1.10 | 2.20 | 2.68 | −3.32 | −3.42 |
| 28 | 50 | 9 | 6.8 | 9.9 | 2.50 | 3.09 × 10−5 | 1.11 × 10−4 | 1.70 | 0.95 | 0.83 | 2.69 | −4.51 | −3.95 |
| 29 | 48 | 10 | 23 | 10.2 | 2.50 | 4.94 × 10−5 | 2.10 × 10−4 | 1.68 | 1.00 | 1.36 | 2.69 | −4.31 | −3.68 |
| 30 | 48 | 8 | 3.9 | 10.4 | 2.50 | 1.85 × 10−5 | 1.05 × 10−4 | 1.68 | 0.90 | 0.59 | 2.70 | −4.73 | −3.98 |
| 31 | 46 | 7 | 2.3 | 10.2 | 2.50 | 1.23 × 10−5 | 1.23 × 10−4 | 1.66 | 0.85 | 0.36 | 2.67 | −4.91 | −3.91 |
| 32 | 17 | 3 | 1.54 | 30.5 | 9.90 | 4.94 × 10−5 | 3.70 × 10−5 | 1.23 | 0.48 | 0.19 | 2.71 | −4.31 | −4.43 |
| 33 | 15.5 | 1.5 | 0.32 | 32 | 9.31 | 1.23 × 10−5 | 5.55 × 10−5 | 1.19 | 0.18 | −0.49 | 2.70 | −4.91 | −4.26 |
| 34 | 13 | 4 | 225 | 37 | 13.0 | 1.36 × 10−4 | 1.85 × 10−5 | 1.11 | 0.60 | 2.35 | 2.68 | −3.87 | −4.73 |
| No. | Planar Shape | Planar Size (μm) | Sensing Layer Composition | Sensing Layer Deposition Method |
|---|---|---|---|---|
| 1 | rectangle | 2.5 × 7.5 | (Co52Fe48)75B25 | standard |
| 2 | rectangle | 2.5 × 7.5 | (Co52Fe48)75B25 | standard |
| 3 | square | 5 × 5 | Co20Fe60B20 | linear dynamic |
| 4 | rectangle | 2.5 × 7.5 | (Co52Fe48)75B25 | standard |
| 5 | rectangle | 3 × 9 | (Co52Fe48)75B25 | standard |
| 6 | rectangle | 2.5 × 7.5 | (Co52Fe48)75B25 | standard |
| 7 | rectangle | 3 × 9 | (Co52Fe48)75B25 | standard |
| 8 | rectangle | 3 × 9 | (Co52Fe48)75B25 | standard |
| 9 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 10 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 11 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 12 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 13 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 14 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 15 | square | 10 × 10 | Co20Fe60B20 | linear dynamic |
| 16 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 17 | rectangle | 2 × 36 | (Co52Fe48)75B25 | standard |
| 18 | square | 20 × 20 | Co20Fe60B20 | linear dynamic |
| 19 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 20 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 21 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 22 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 23 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 24 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 25 | circle | diameter 30 | Co60Fe20B20 | linear dynamic |
| 26 | circle | diameter 60 | Co60Fe20B20 | linear dynamic |
| 27 | circle | diameter 60 | Co60Fe20B20 | linear dynamic |
| 28 | circle | diameter 50 | Co60Fe20B20 | linear dynamic |
| 29 | circle | diameter 50 | Co60Fe20B20 | linear dynamic |
| 30 | circle | diameter 50 | Co60Fe20B20 | linear dynamic |
| 31 | circle | diameter 50 | Co60Fe20B20 | linear dynamic |
| 32 | square | 90 × 90 | Co40Fe40B20 | linear dynamic |
| 33 | square | 90 × 90 | Co40Fe40B20 | linear dynamic |
| 34 | square | 100 × 100 | Co40Fe40B20 | linear dynamic |
References
- Reig, C.; Cardoso de Freitas, S.; Mukhopadhyay, S.C. Giant Magnetoresistance (GMR) Sensors from Basis to State-of-the-Art Applications; SSMI 6; Springer: Berlin/Heidelberg, Germany, 2013; pp. 157–180. [Google Scholar] [CrossRef]
- Loureiro, J.; Fermon, C.; Pannetier-Lecoeur, M.; Arrias, G.; Ferreira, R.; Cardoso, S.; Freitas, P.P. Magnetoresistive detection of magnetic beads flowing at high speed in microfluidic channels. IEEE Trans. Magn. 2009, 45, 4873–4876. [Google Scholar] [CrossRef]
- Cardoso, S.; Leitao, D.C.; Gameiro, L.; Cardoso, F.; Ferreira, R.; Paz, E.; Freitas, P.P. Magnetic tunnel junction sensors with pTesla sensitivity. Microsyst. Technol. 2014, 20, 793–802. [Google Scholar] [CrossRef]
- García Vidal, E.; Ramírez Muñoz, D.; Ravelo Arias, S.I.; Sánchez Moreno, J.; Cardoso, S.; Ferreira, R.; Freitas, P.P. Electronic Energy Meter Based on a Tunnel Magnetoresistive Effect (TMR) Current Sensor. Materials 2017, 10, 1134. [Google Scholar] [CrossRef]
- Mazumdar, D.; Liu, X.; Schrag, B.D.; Carter, M.; Shen, W.; Xiao, G. Low frequency noise in highly sensitive magnetic tunnel junctions. Appl. Phys. Lett. 2007, 91, 033507. [Google Scholar] [CrossRef]
- Wisniowski, P.; Dabek, M.; Wrona, J. Field noise in tunneling magnetoresistance sensors with variable sensitivity. Appl. Phys. Lett. 2015, 106, 052404. [Google Scholar] [CrossRef]
- Egelhoff, W.F., Jr.; Pong, P.W.T.; Unguris, J.; McMichael, R.D.; Nowak, E.R.; Edelstein, A.S.; Burnette, J.E.; Fischer, G.A. Critical challenges for picoTesla magnetic-tunnel-junction sensors. Sens. Actuators A Phys. 2009, 155, 217. [Google Scholar] [CrossRef]
- Lei, Z.Q.; Li, G.J.; Egelhoff, W.F., Jr.; Lai, P.T.; Pong, P.W.T. Review of Noise Sources in Magnetic Tunnel Junction Sensors. IEEE Tran. Magn. 2011, 47, 602–612. [Google Scholar] [CrossRef]
- Mouchel, M.; Bocheux, A.; Ducruet, C.; Sabon, P.; Prejbeanu, I.L.; Conraux, Y.; Alvarez-Herault, J.; Mackay, K.; Baraduc, C. Noise study of magnetic field sensors based on magnetic tunnel junctions. J. Phys. Conf. Ser. 2017, 903, 012008. [Google Scholar] [CrossRef]
- Ingvarsson, S.; Xiao, G.; Parkin, S.S.P.; Gallagher, W.J.; Grinstein, G.; Koch, R.H. Low-frequency magnetic noise in micron-scale magnetic tunnel junctions. Phys. Rev. Lett. 2000, 85, 3289. [Google Scholar] [CrossRef] [PubMed]
- Arakawa, T.; Tanaka, T.; Chida, K.; Matsuo, S.; Nishihara, Y.; Chiba, D.; Kobayashi, K.; Ono, T.; Fukushima, A.; Yuasa, S. Low-frequency and shot noises in CoFeB/MgO/CoFeB magnetic tunneling junctions. Phys. Rev. B 2012, 86, 224423. [Google Scholar] [CrossRef]
- Wisniowski, P.; Dabek, M.; Skowronski, W.; Stobiecki, T.; Cardoso, S.; Freitas, P.P. Reduction of low frequency magnetic noise by voltage-induced magnetic anisotropy modulation in tunneling magnetoresistance sensors. Appl. Phys. Lett. 2014, 105, 082404. [Google Scholar] [CrossRef]
- Wisniowski, P.; Dabek, M.; Skowronski, W.; Cardoso, S.; Freitas, P.P. Effect of CoFeB electrode compositions on low frequency magnetic noise in tunneling magnetoresistance sensors. J. Appl. Phys. 2017, 122, 213906. [Google Scholar] [CrossRef]
- Friedman, J.; Hastie, T.; Tibshirani, R. The Elements of Statistical Learning; Springer: New York, NY, USA, 2001; Volume 1. [Google Scholar] [CrossRef]
- James, G.; Witten, D.; Hastie, T.; Tibshirani, R. An Introduction to Statistical Learning with Applications in R; Springer: New York, NY, USA, 2013. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chęciński, J.; Wiśniowski, P.; Frankowski, M.; Stobiecki, T. Magnetic Noise Prediction and Evaluation in Tunneling Magnetoresistance Sensors. Sensors 2018, 18, 3055. https://doi.org/10.3390/s18093055
Chęciński J, Wiśniowski P, Frankowski M, Stobiecki T. Magnetic Noise Prediction and Evaluation in Tunneling Magnetoresistance Sensors. Sensors. 2018; 18(9):3055. https://doi.org/10.3390/s18093055
Chicago/Turabian StyleChęciński, Jakub, Piotr Wiśniowski, Marek Frankowski, and Tomasz Stobiecki. 2018. "Magnetic Noise Prediction and Evaluation in Tunneling Magnetoresistance Sensors" Sensors 18, no. 9: 3055. https://doi.org/10.3390/s18093055
APA StyleChęciński, J., Wiśniowski, P., Frankowski, M., & Stobiecki, T. (2018). Magnetic Noise Prediction and Evaluation in Tunneling Magnetoresistance Sensors. Sensors, 18(9), 3055. https://doi.org/10.3390/s18093055