Backstepping Sliding Mode Control for Radar Seeker Servo System Considering Guidance and Control System



Abstract
:1. Introduction
- (1)
- Differently from existing studies, this paper combined the RSSSP with missile guidance and control systems to design a control algorithm, and a Monte Carlo simulation was carried out to verify the improvement of guidance precision, which is more realistic than analyzing servo systems by themselves;
- (2)
- differently from traditional research in which the reference signal is given as a specific function, this paper applies HTD to estimate system states in real time, and all signals involved were generated in real time;
- (3)
- different from traditional RBFNN, this paper proposed an adaptive RBFNN that adjusts the residual error in time, which enhances the estimation precision. No training is needed.
2. System Modeling and Problem Formulation
2.1. Constitution and Operating Principle of Two-Axis RSSSP
2.2. Dynamic Model of the RSSSP
2.3. Dynamic Model of Guidance and Control Systems
2.4. Control Problems for RSSSP
- (1)
- When there exist torque disturbances and angular-rate disturbances generated by projectile motion, high-performance angle tracking is hard to guarantee;
- (2)
- due to the change of the flight environment and the limited accuracy of mathematical modeling, coefficient uncertainty, and perturbation, tracking performance may not be guaranteed;
- (3)
- to enhance the performance of RSSSP, the states have to be estimated precisely in real time.
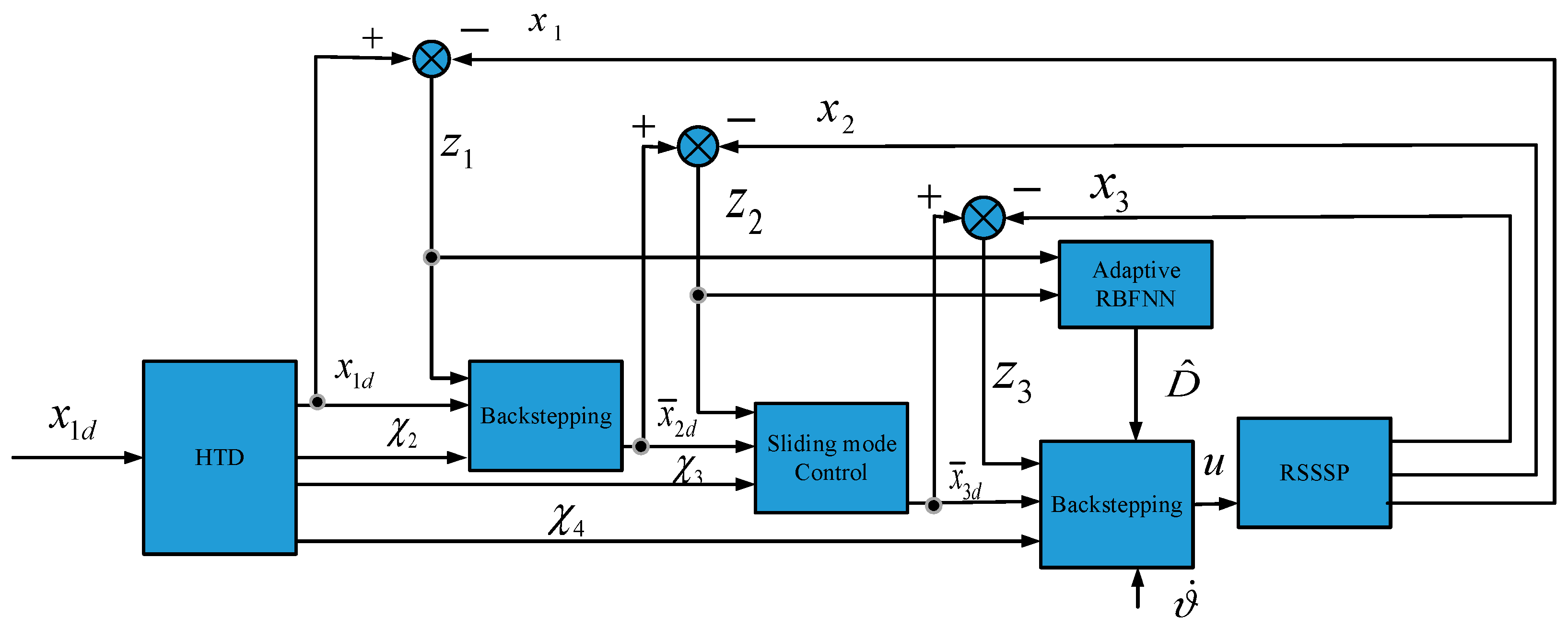
3. Controller Design
3.1. High-Order Tracking Differentiator
3.2. Adaptive Neural Network
3.3. Controller Design for RSSSP
3.4. Stability Analysis
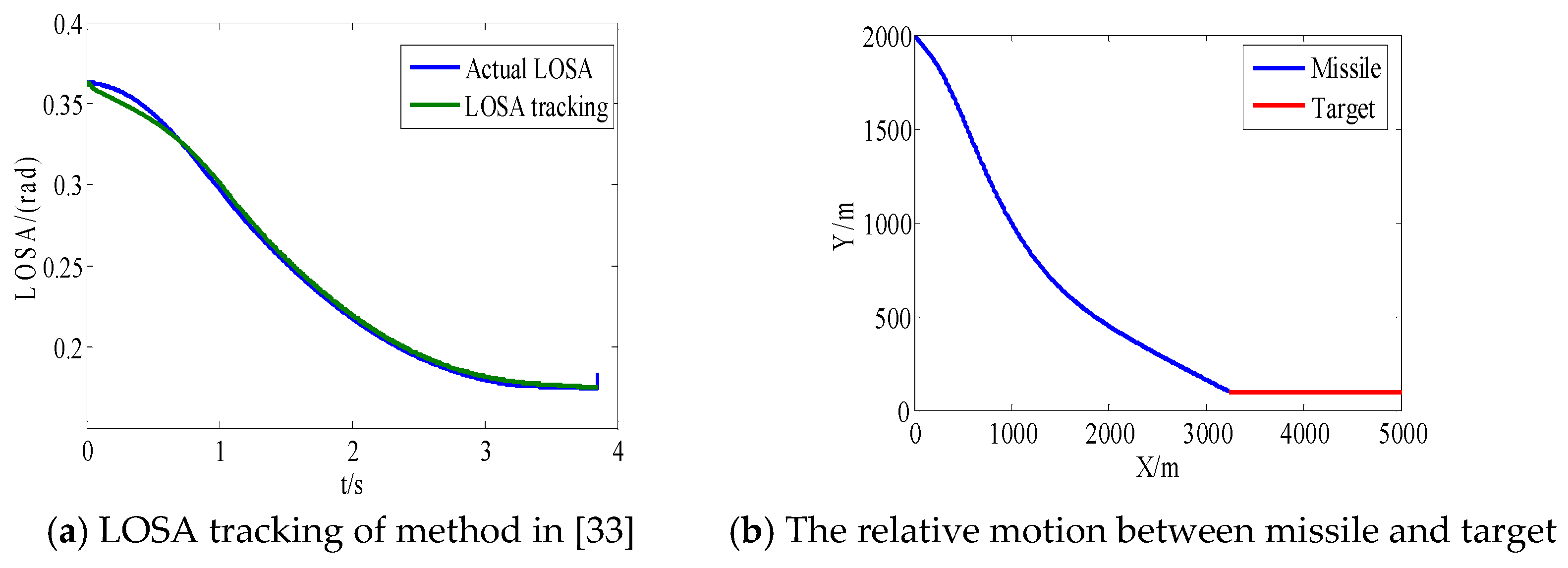
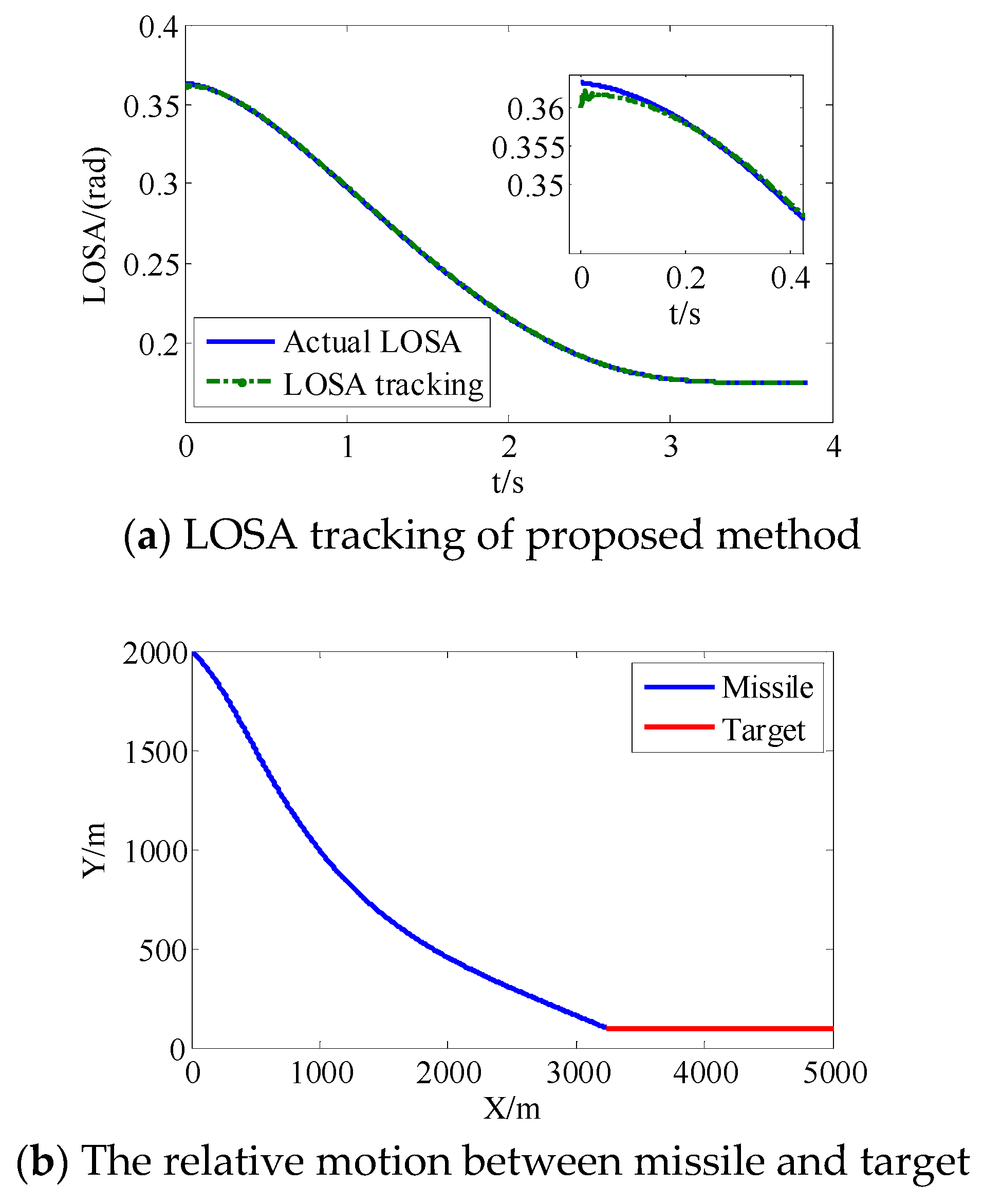
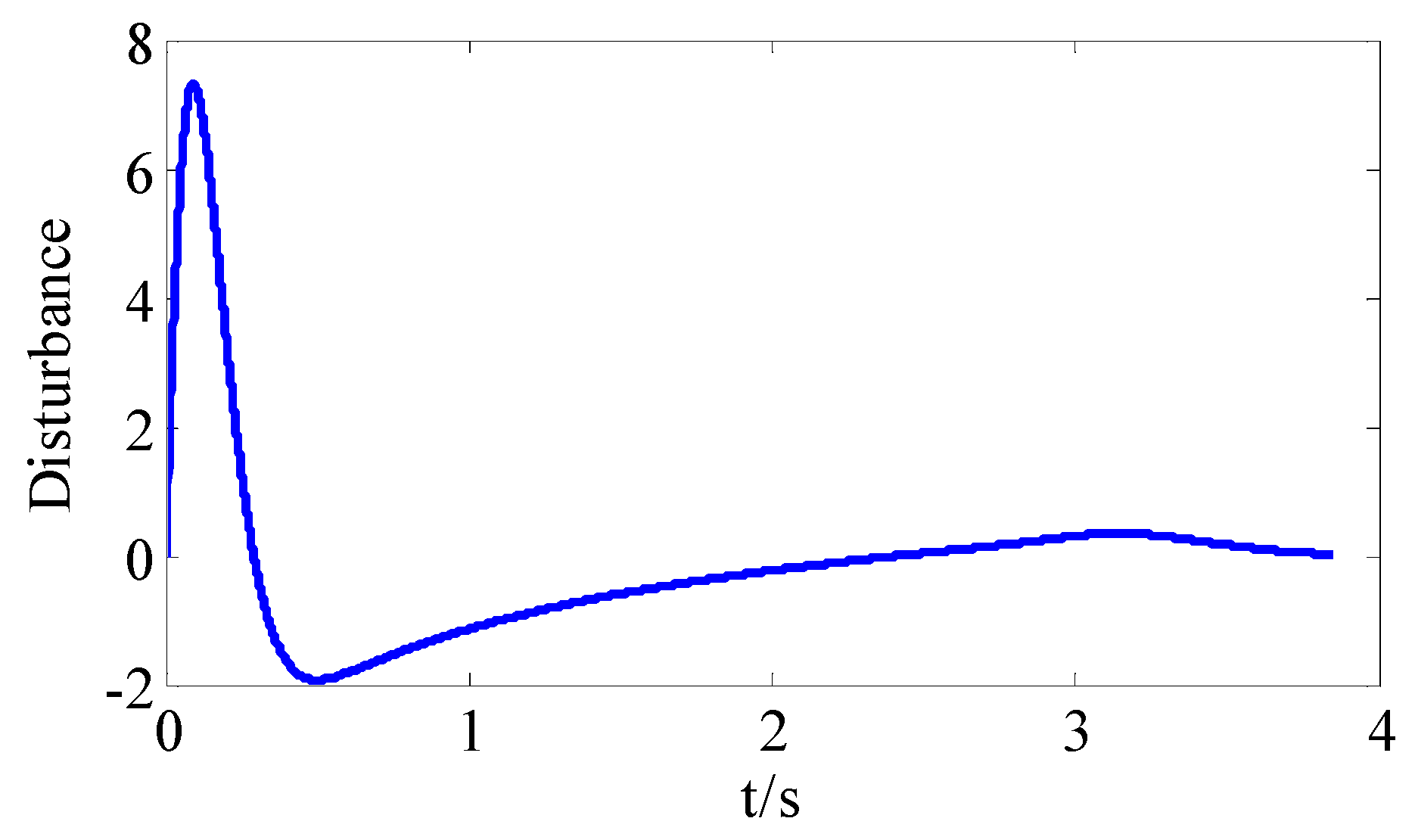
4. Simulation and Analysis
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Data Availability Statement
References
- Stepaniak, M.J.; Mu, D.H.; Van, G.F. Field programmable gate array-based attitude stabilization. J. Aerosp. Comput. Inf. Commun. 2009, 6, 451–463. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Zhao, B.L.; Wei, L. A compound scheme on parameters identification and adaptive compensation of nonlinear friction disturbance for the aerial inertially stabilized platform. ISA Trans. 2017, 67, 293–305. [Google Scholar] [CrossRef] [PubMed]
- Haarhoff, D.; Kolditz, M.; Abel, D.; Brell-Cokcan, S. Actuator Design for Stabilizing Single Tendon Platforms; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Kennedy, P.J.; Kennedy, R.L. Direct versus indirect line of sight stabilization. IEEE Trans. Control Syst. Technol. 2013, 11, 1293–1299. [Google Scholar] [CrossRef]
- Sun, H.; Zhang, S.M. Computation model and error budget for image motion of aerial imaging system. Electron. Opt. Control 2012, 20, 2492–2499. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Yang, T.; Li, C.Y.; Liu, S.S.; Du, C.C.; Li, M.; Sun, H. Fuzzy-PID control for the position loop of aerial inertially stabilized platform. Aerosp. Sci. Technol. 2014, 36, 21–26. [Google Scholar] [CrossRef]
- Martin, R.; Zdenek, H. Structured MIMO design for dual-stage inertial stabilization: Case study for HIFOO and Hinfstruct solvers. Mechatronics 2013, 23, 1084–1093. [Google Scholar]
- Jha, S.K.; Gaur, A.K.Y. Robust and optimal control of a missile seeker system using sliding modes. Control Eng. Appl. Inf. 2014, 16, 70–79. [Google Scholar]
- Zou, Y.; Lei, X.S. A compound control method based on the adaptive neural network and sliding mode control for inertial stable platform. Neurocomputing 2015, 155, 286–294. [Google Scholar] [CrossRef]
- Matraji, I.; Al-Durra, A.; Haryono, A.; Al-Wahedi, K.; Abou-Khousa, M. Trajectory tracking control of skid-steered mobile robot based on adaptive second order sliding mode control. Control Eng. Pract. 2018, 72, 167–176. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S. Time-varying and constant switching frequency-based sliding-mode control methods for transformerless DVR employing half-bridge VSI. IEEE Trans. Ind. Electron. 2017, 64, 2570–2579. [Google Scholar] [CrossRef]
- Incremona, G.P.; Cucuzzella, M.; Ferrara, A. Adaptive suboptimal second-order sliding mode control for microgrids. Int. J. Control 2016, 89, 1849–1867. [Google Scholar] [CrossRef]
- Precup, R.E.; Radac, M.B.; Roman, R.C. Model-free sliding mode control of nonlinear systems: Algorithms and experiments. Inf. Sci. 2017, 381, 176–192. [Google Scholar] [CrossRef]
- Bu, X.W.; Wu, X.Y.; Ma, Z.; Rui, Z. Novel adaptive neural control of flexible air-breathing hypersonic vehicles based on sliding mode differentiator. Chin. J. Aeronaut. 2015, 28, 1209–1216. [Google Scholar] [CrossRef]
- Wei, Y.; Ma, J.G.; Xiao, J. Tracking control strategy for the optoelectronic system on the flexible suspended platform based on backstepping method. In Proceedings of the Sixth International Symposium on Advanced Optical Manufacturing and Testing Technologies, Xiamen, China, 15 October 2012. [Google Scholar]
- Giap, N.H.; Shin, J.H.; Kim, W.H. Robust adaptive neural network control for XY table. Intell. Control Autom. 2013, 4, 293–300. [Google Scholar] [CrossRef]
- Lei, X.S.; Zou, Y.; Dong, F. A composite control method based on the adaptive RBFNN feedback control and the ESO for two-axis inertially stabilized platforms. ISA Trans. 2015, 59, 424–433. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.Y.; Yuan, J.Q.; Cai, T.T. Dual-rate-loop control based on disturbance observer of angular acceleration for a three-axis aerial inertially stabilized platform. ISA Trans. 2016, 63, 288–298. [Google Scholar] [CrossRef] [PubMed]
- Yao, J.Y.; Jiao, Z.X.; Ma, D.W. Extended-State-Observer-Based Output Feedback Nonlinear Robust Control of Hydraulic Systems with Backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Bu, X.W. Guaranteeing prescribed output tracking performance for air-breathing hypersonic vehicles via non-affine back-stepping control design. Nonlinear Dyn. 2018, 91, 525–538. [Google Scholar] [CrossRef]
- Du, X.; Liu, T.Y.; Xia, Q.L. Research of disturbance rejection effect performance of phased array seeker with platform for air-to-air missile. Syst. Eng. Electron. 2017, 39, 846–853. [Google Scholar]
- Song, T.; Lin, D.F.; Wang, J. Influence of seeker disturbance rejection rate on missile guidance system. J. Harbin Eng. Univ. 2013, 34, 1234–1241. [Google Scholar]
- Bai, R.; Xia, Q.L.; Du, X. The study of guidance performance of a phased array seeker with platform. Optik 2017, 132, 9–23. [Google Scholar] [CrossRef]
- Wen, Q.Q.; Lu, T.Y.; Xia, Q.L. Beam-pointing error compensation method of phased array radar seeker with phantom-bit technology. Chin. J. Aeronaut. 2017, 30, 1217–1230. [Google Scholar] [CrossRef]
- Zhang, X.L.; Yan, Z.; Guo, K.; Li, G.L.; Deng, N.M. An adaptive B-spline neural network and its application in terminal sliding mode control for a mobile sitcom antenna inertially stabilized platform. Sensors 2017, 17, 978. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.K.; Lei, H.H.; Xue, D.F. Nonlinear differential geometric guidance for maneuvering target. J. Syst. Eng. Electron. 2012, 23, 752–760. [Google Scholar] [CrossRef]
- Bu, X.W.; Wu, X.Y.; Tian, M.Y.; Huang, J.Q.; Zhang, R.; Ma, Z. High-order tracking differentiator based adaptive neural control of a flexible air-breathing hypersonic vehicle subject to actuators constraints. ISA Trans. 2015, 58, 237–247. [Google Scholar] [CrossRef] [PubMed]
- Emna, K.G.; Moez, F.; Derbel, N. Sliding mode control of a hydraulic servo system position using adaptive sliding surface and adaptive gain. Int. J. Model. Identif. Control 2015, 23, 248–259. [Google Scholar]
- Bu, X.W.; He, G.J.; Wang, K. Tracking control of air-breathing hypersonic vehicles with non-affine dynamics via improved neural backstepping design. ISA Trans. 2018, 75, 88–100. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Liu, X.; Liu, K.; Lin, C. Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 2009, 45, 1530–1545. [Google Scholar] [CrossRef]
- Lei, X.S.; Ge, S.Z.S.; Fang, J.C. Adaptive neural network control of small unmanned aerial rotorcraft. J. Intell. Rob. Syst. 2014, 75, 331–341. [Google Scholar] [CrossRef]
- Guo, J.G.; Han, T.; Zhou, J.; Wang, G.Q. Second-order sliding-mode guidance law with impact angle constraint. Acta Aeronaut. 2017, 38, 1–10. [Google Scholar]
- Ye, W.J.; Shen, W.X.; Zheng, J.C. Sliding mode control of longitudinal motions for underground mining electric vehicles with parametric uncertainties. Int. J. Model. Identif. Control 2016, 26, 68–78. [Google Scholar] [CrossRef]
- Hablani, H.B.; Pearson, D.W. Miss distance error analysis of exoatmospheric interceptors. J. Guid. Control Dyn. 2004, 27, 283–289. [Google Scholar] [CrossRef]
- Panchal, B.; Subramanian, K.; Talole, S.E. Robust missile autopilot design using two time-scale separation. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1499–1510. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Method | Combat Scenario | Proportional Coefficient | Average Miss Distance/m |
|---|---|---|---|
| Proposed method | Low-altitude targets | 0.338 | |
| High-altitude targets | 3 | 0.521 | |
| 5 | 0.785 | ||
| 6 | 0.635 | ||
| Method in [20] | Low-altitude targets | 0.685 | |
| High-altitude targets | 3 | 0.946 | |
| 5 | 1.658 | ||
| 6 | 1.885 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Lei, H.; Ye, J.; Bu, X. Backstepping Sliding Mode Control for Radar Seeker Servo System Considering Guidance and Control System. Sensors 2018, 18, 2927. https://doi.org/10.3390/s18092927
Wang Y, Lei H, Ye J, Bu X. Backstepping Sliding Mode Control for Radar Seeker Servo System Considering Guidance and Control System. Sensors. 2018; 18(9):2927. https://doi.org/10.3390/s18092927
Chicago/Turabian StyleWang, Yexing, Humin Lei, Jikun Ye, and Xiangwei Bu. 2018. "Backstepping Sliding Mode Control for Radar Seeker Servo System Considering Guidance and Control System" Sensors 18, no. 9: 2927. https://doi.org/10.3390/s18092927
APA StyleWang, Y., Lei, H., Ye, J., & Bu, X. (2018). Backstepping Sliding Mode Control for Radar Seeker Servo System Considering Guidance and Control System. Sensors, 18(9), 2927. https://doi.org/10.3390/s18092927