An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks †





Abstract
1. Introduction
2. Related Work
3. Challenges and Requirements
3.1. Impact of Long and Variable Propagation Delays
3.2. Impacts of Low Bit Rate and Limited Bandwidth
3.3. Energy Consumption
3.4. Motivation
4. Problem Definition
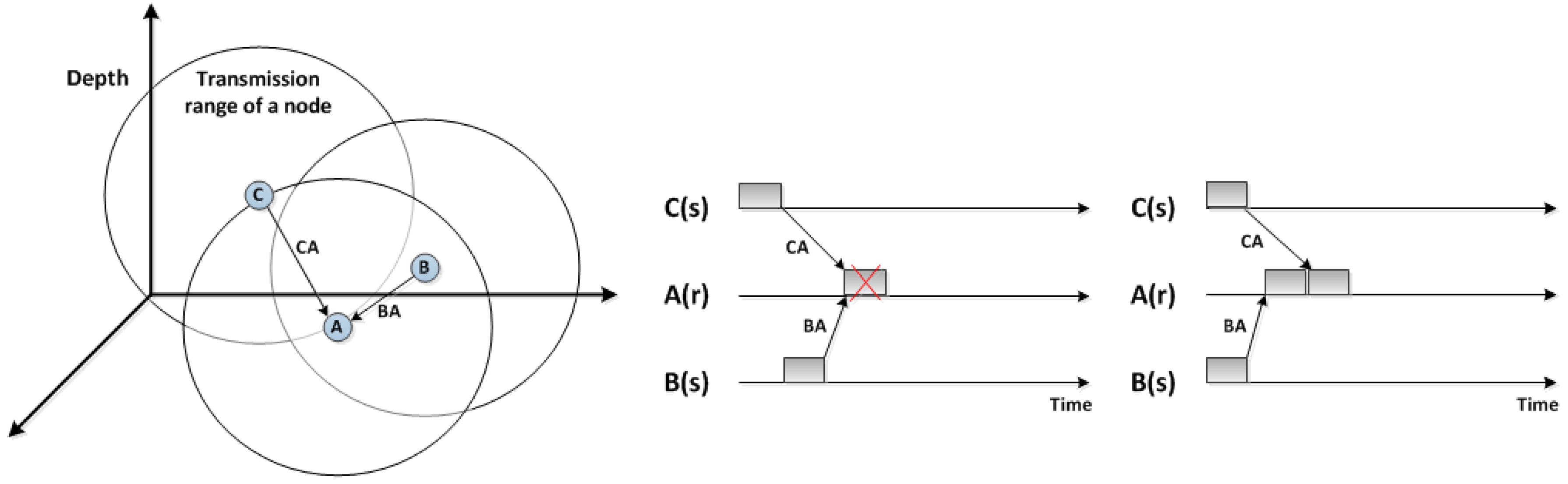
4.1. Hidden Terminal Problem
4.2. Spatial-Temporal Uncertainty Problem
- The collision in the destination node is dependent on the propagation delay and transmission time; thus, it can be shown as a duality that differs between both the transmission time and the location of the sensor nodes.
- The distance between sensor nodes changes based on the uncertainty of current channel status and a data packet may collide even if no other nodes transmit concurrently.
5. Efficient Depth-Based MAC Protocol
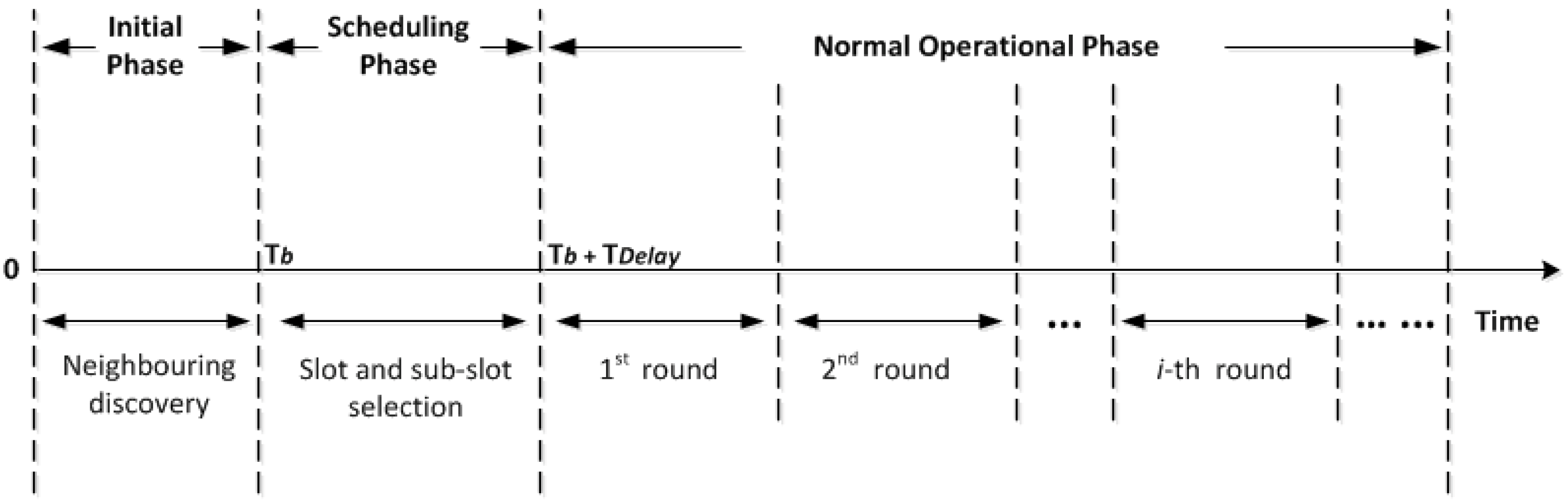
5.1. Overview of ED-MAC Protocol
5.2. Initial Phase
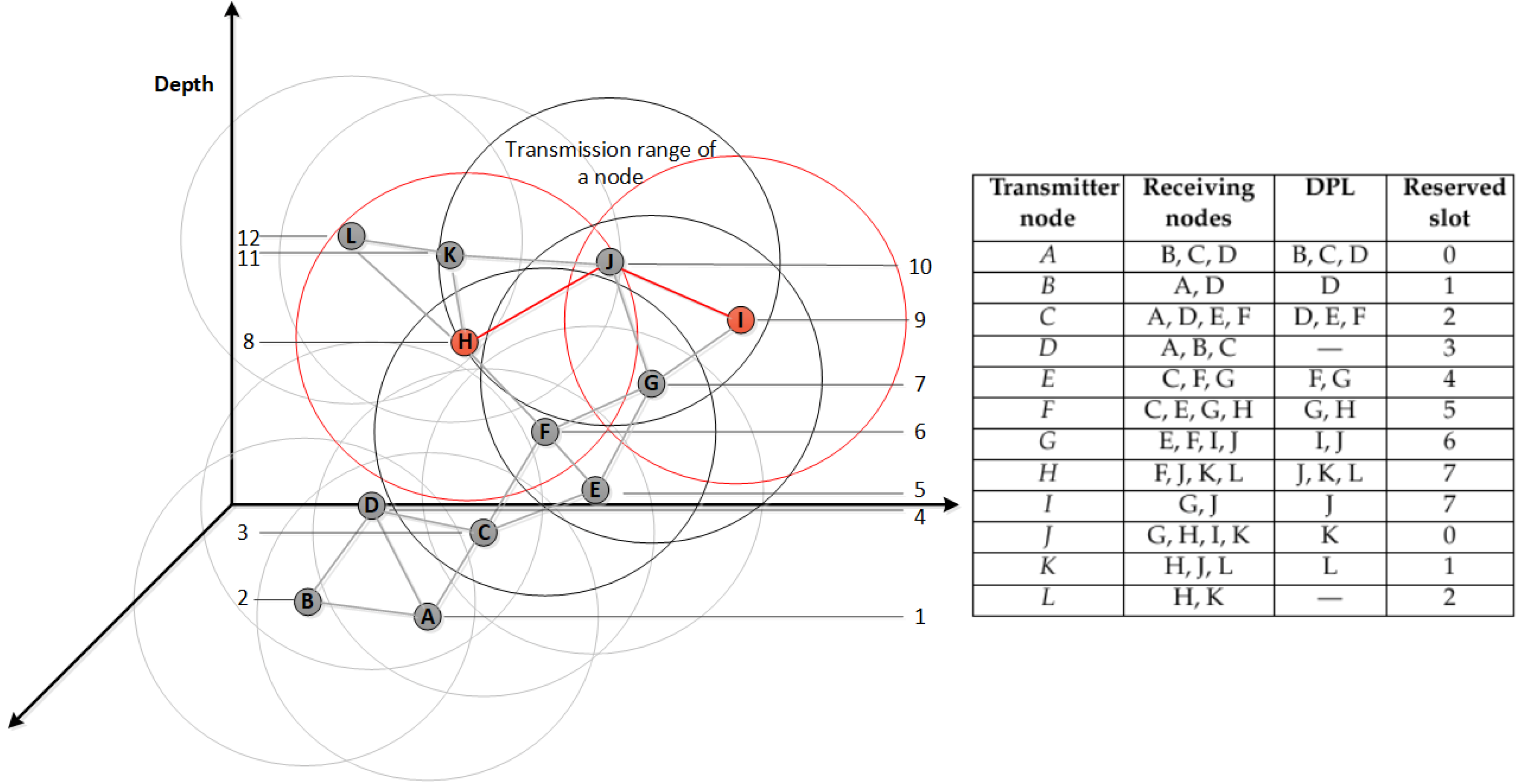
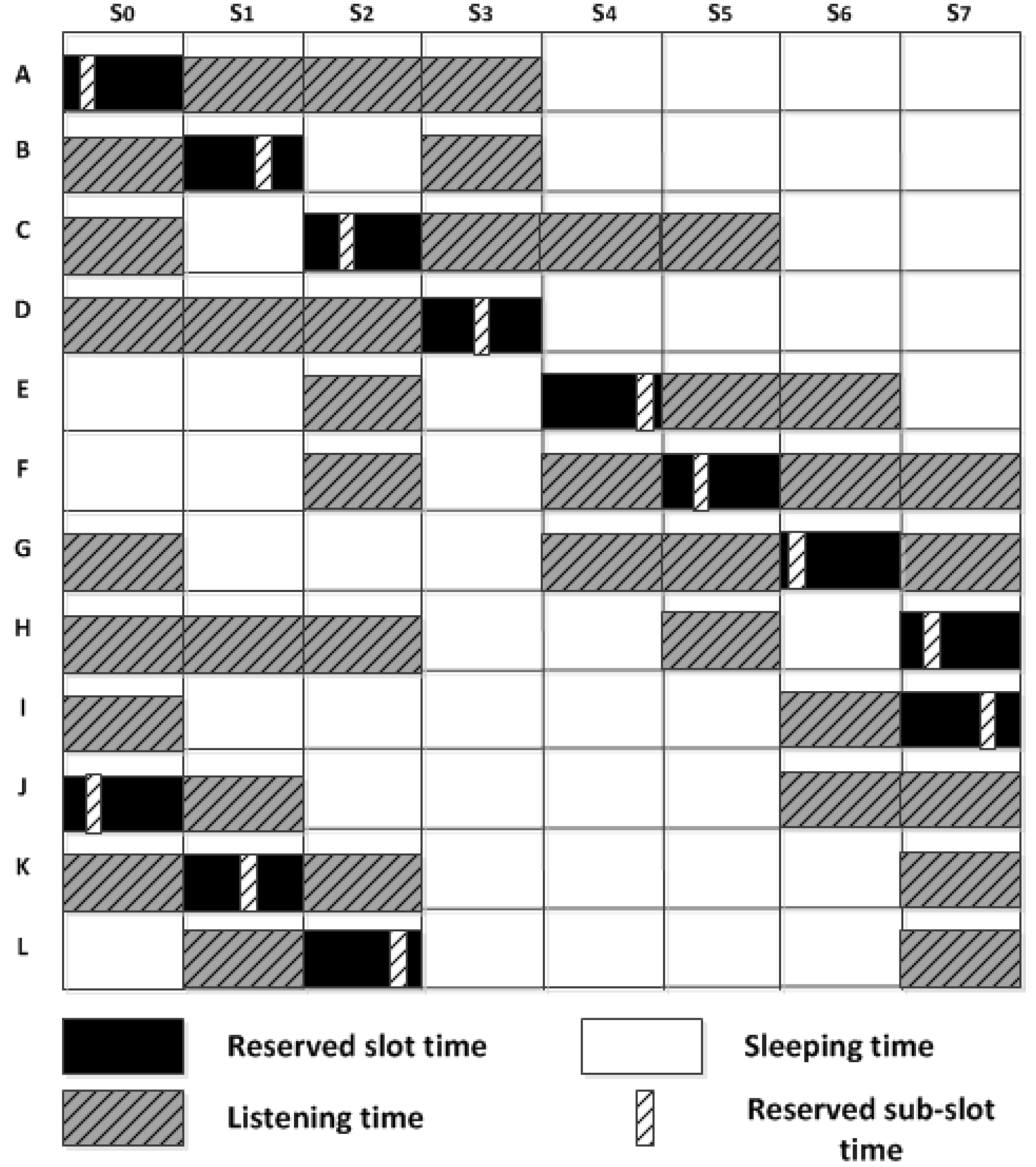
5.3. Scheduling Phase
| Algorithm 1 ED-MAC Scheduling | |
| 1: | procedure Schedule Packet |
| 2: | if depth-based timer is expired then |
| 3: | Sp: a new schedule packet |
| 4: | Sp.slot ← Slot-Selection (Nt, Reserved-slots) |
| 5: | update Twake-up based on Sp.slot |
| 6: | ← {one-hop neighbours with lower depth ordered by their depth} |
| 7: | Sp.ID ← N.ID |
| 8: | Broadcast Sp |
| 9: | end if |
| 10: | end procedure |
| 11: | procedure Receive Schedule Packet (Sp) |
| 12: | if Sp received then |
| 13: | update N.Reserved-slots list |
| 14: | if N.depth < Sp.depth then |
| 15: | update Nt by two-hop neighouring nodes |
| 16: | else |
| 17: | update Twake-up based on Sp.slot |
| 18: | end if |
| 19: | end if |
| 20: | end procedure |
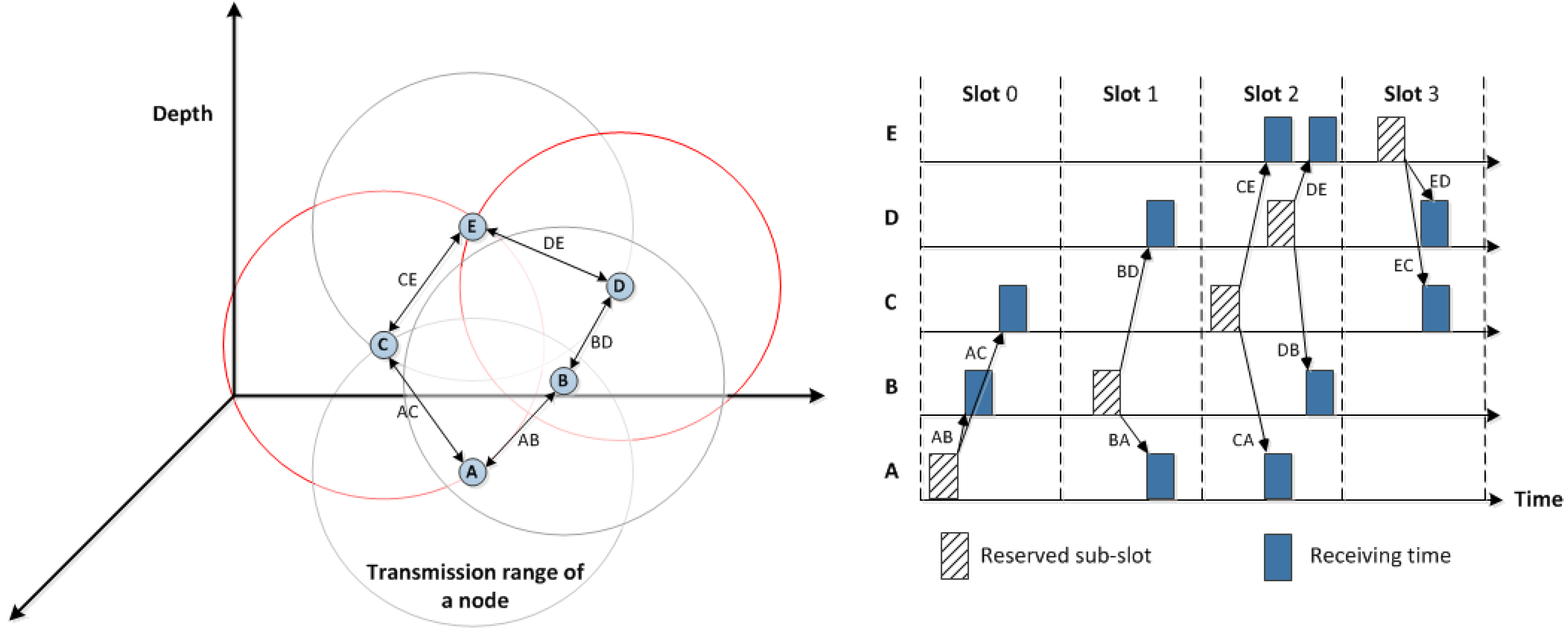
5.4. Normal Operational Phase
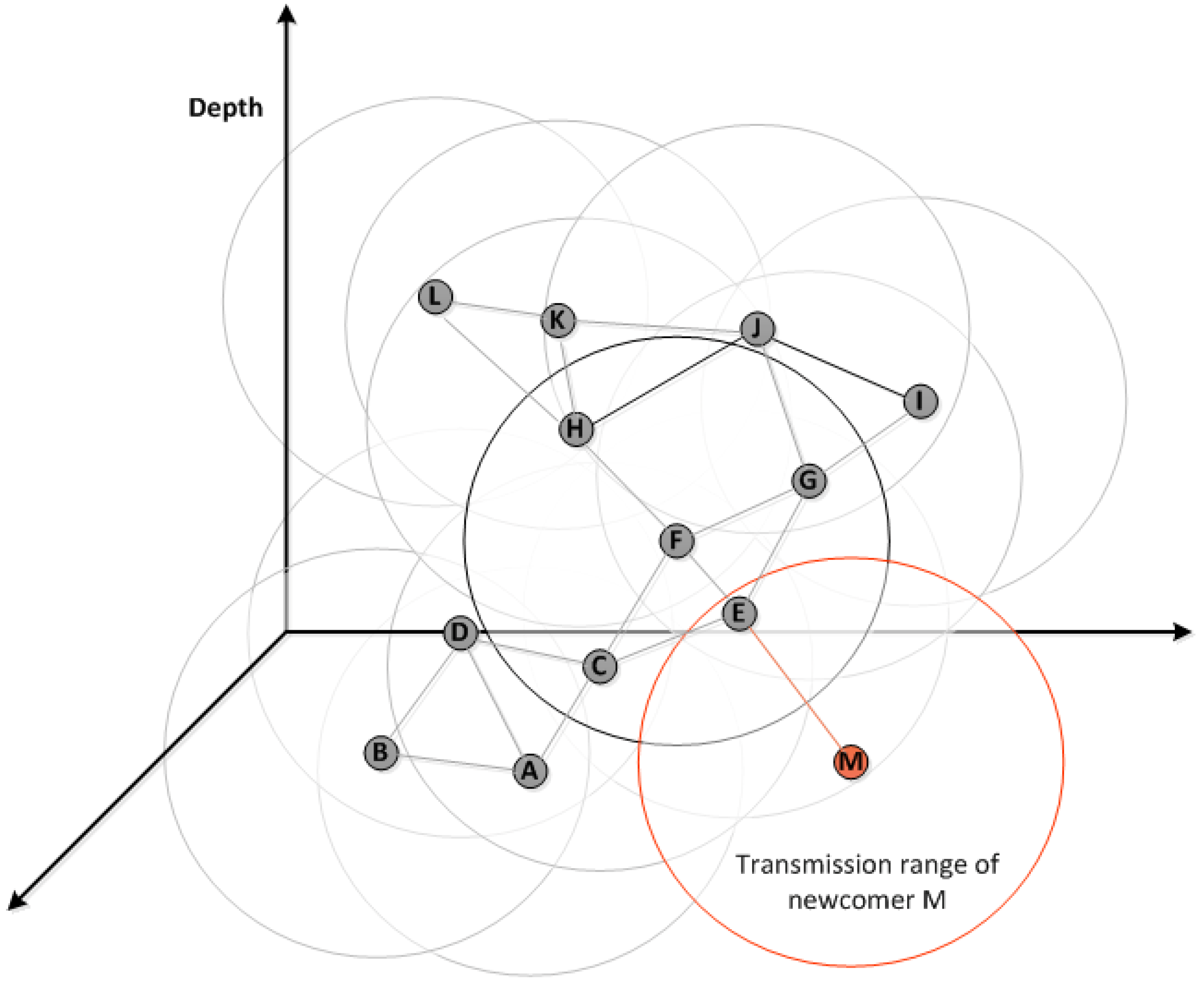
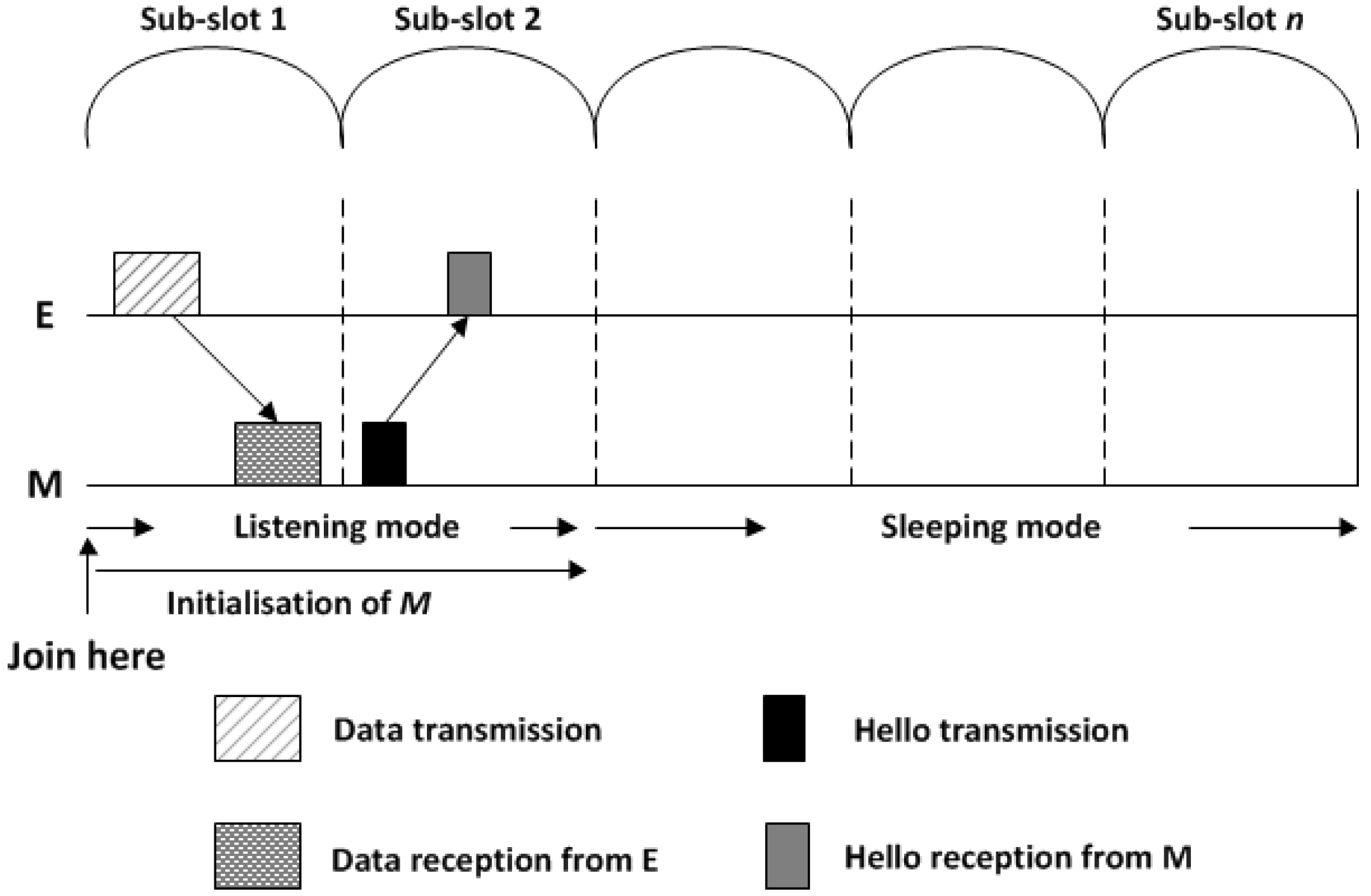
5.5. Handling Newcomers
5.6. Offered Traffic Upper-Bound
5.7. Number of Slots Analysis
6. Performance Evaluation
6.1. Qualitative Comparison
6.2. Implementation
6.3. Performance Metrics
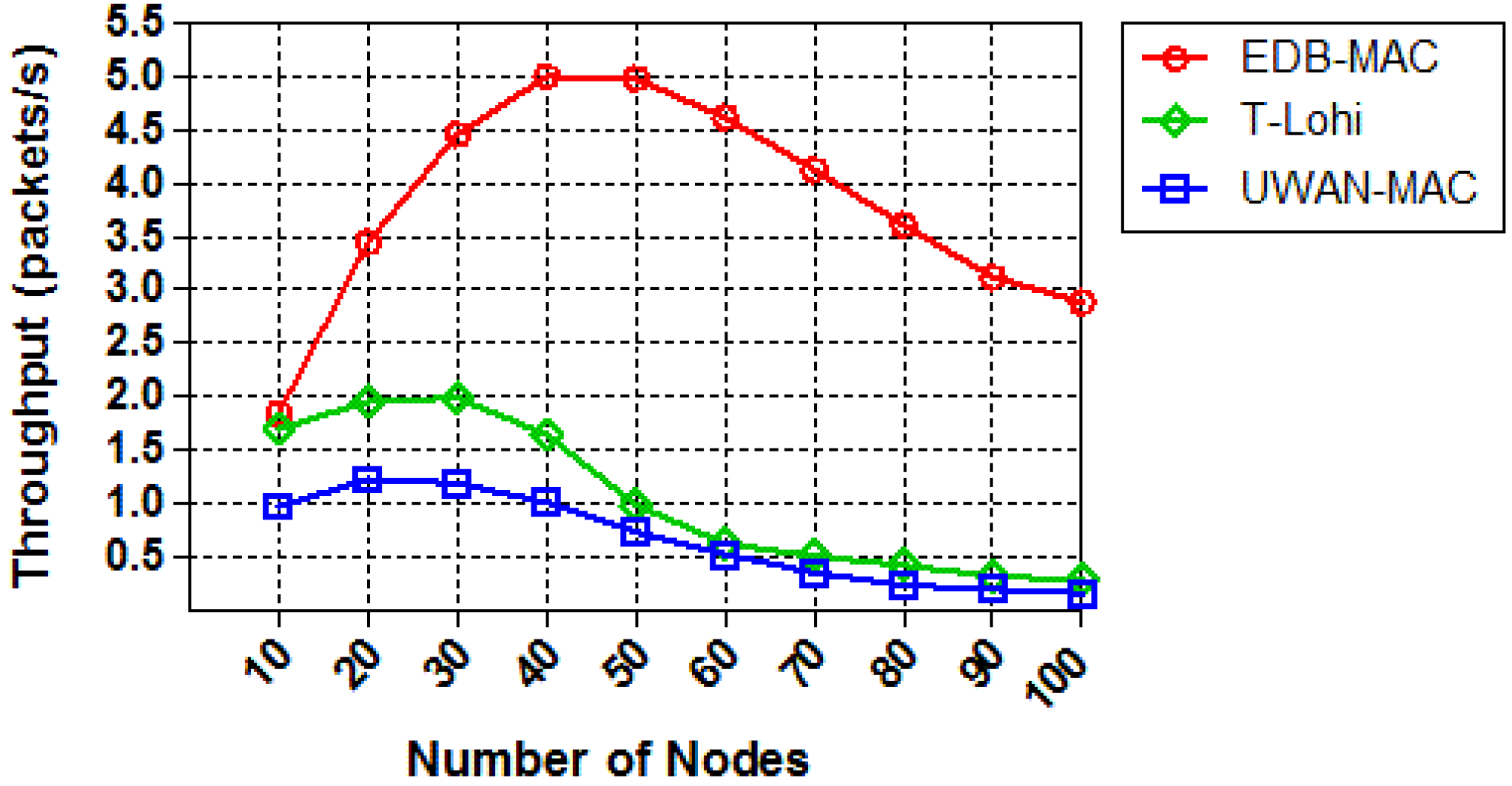
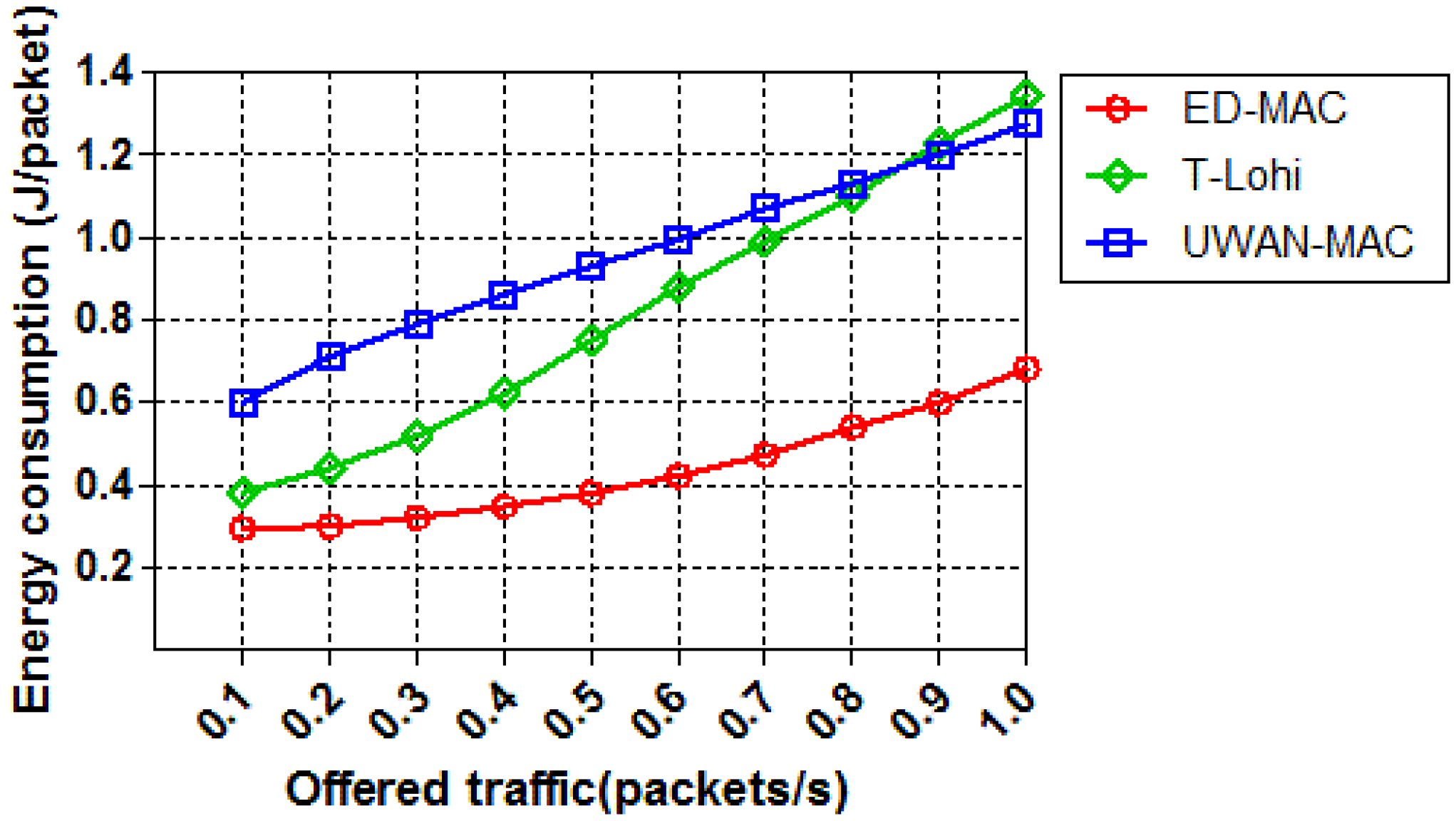
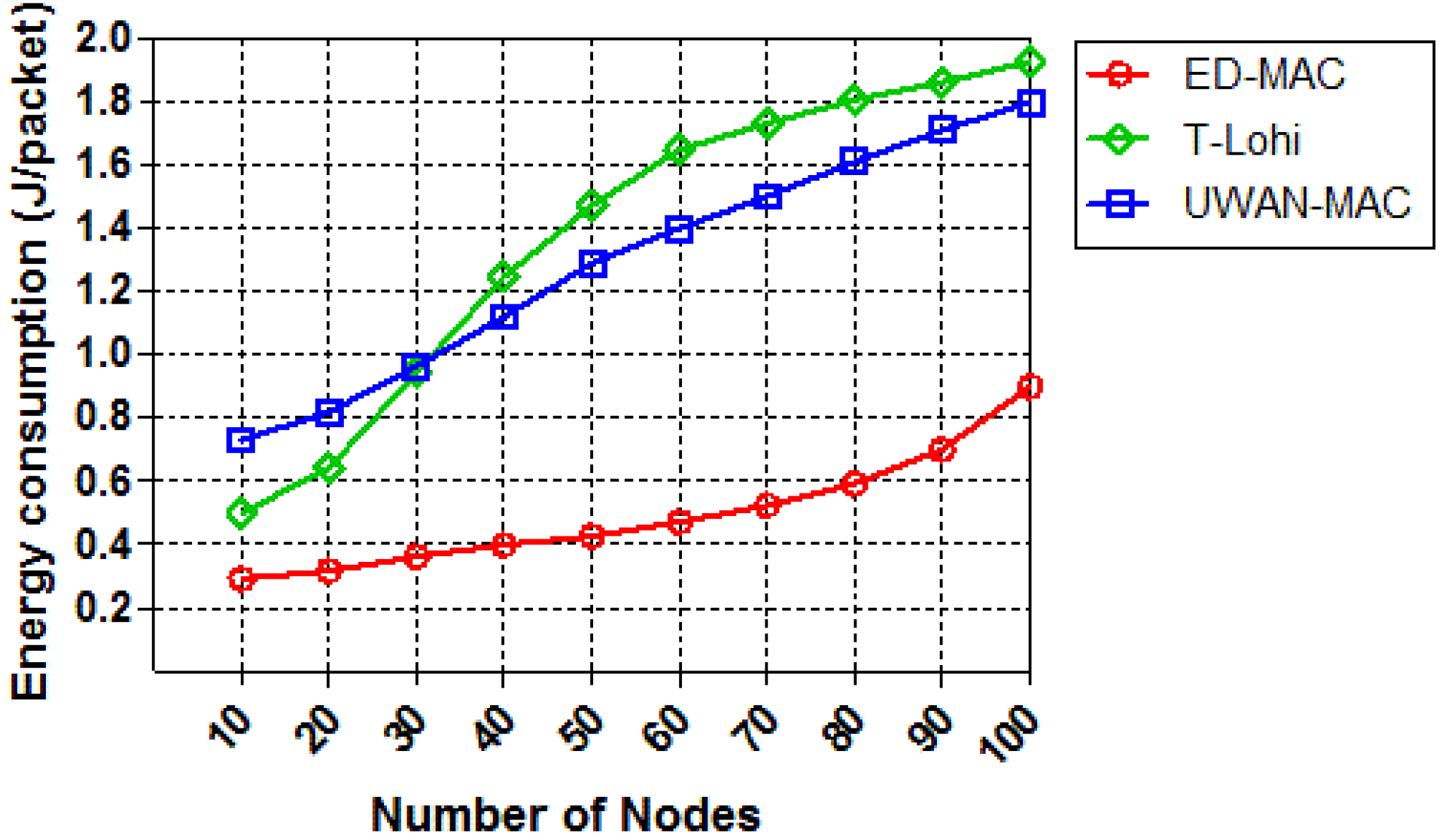
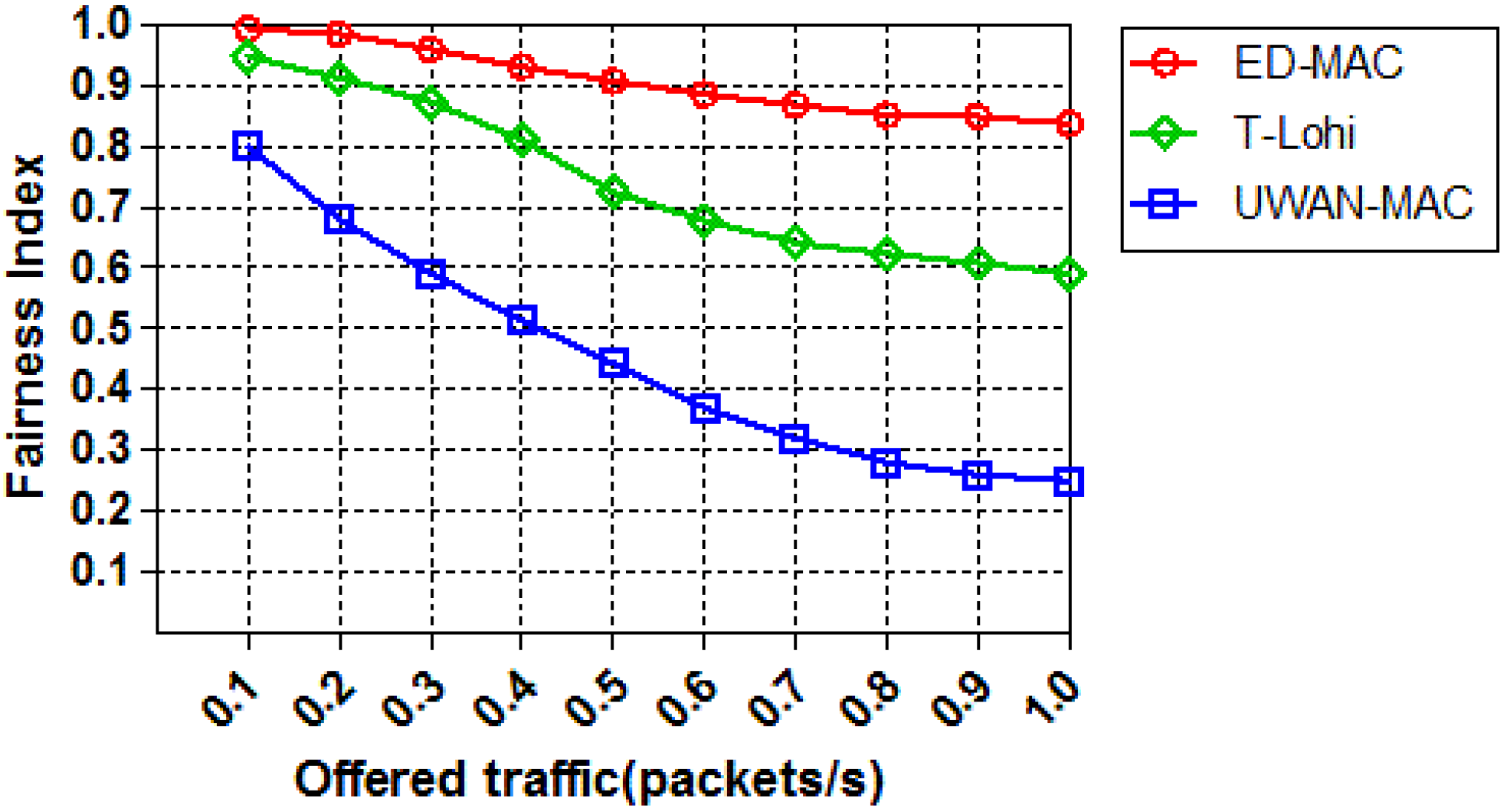
6.4. Simulation Results
7. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jiang, S. State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: A survey based on a MAC reference model. IEEE Commun. Surv. Tutor 2018, 20, 96–131. [Google Scholar] [CrossRef]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. Performance comparison of sender-based and receiver-based scheduling mac protocols for underwater sensor networks. In Proceedings of the 19th International Conference on Network-Based Information Systems (NBiS), Ostrava, Czech Republic, 7–9 September 2016; pp. 99–106. [Google Scholar]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applications. Network 2006, 20, 12–18. [Google Scholar]
- Potter, J.; Alves, J.; Green, D.; Zappa, G.; Nissen, I.; McCoy, K. The JANUS underwater communications standard. In Proceedings of the 2014 Underwater Communications and Networking, Sestri Levante, Italy, 3–5 September 2014. [Google Scholar]
- Hsu, C.C.; Lai, K.F.; Chou, C.F.; Lin, K.C.J. ST-MAC: Spatial-temporal mac scheduling for underwater sensor networks. In Proceedings of the IEEE INFOCOM, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 1827–1835. [Google Scholar]
- Xie, P.; Cui, J.H. R-MAC: An energy-efficient MAC protocol for underwater sensor networks. In Proceedings of the International Conference on Wireless Algorithms, Systems and Applications, Chicago, IL, USA, 1–3 August 2007; pp. 187–198. [Google Scholar]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. Void-handling techniques for routing protocols in underwater sensor networks: Survey and challenges. IEEE Commun. Surveys Tuts. 2017, 19, 800–827. [Google Scholar] [CrossRef]
- Liao, W.H.; Huang, C.C. SF-MAC: A spatially fair MAC protocol for underwater acoustic sensor networks. IEEE Sens. J. 2012, 12, 1686–1694. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Commun. Surveys Tuts. 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- Nowsheen, N.; Karmakar, G.; Kamruzzaman, J. PRADD: A path reliability-aware data delivery protocol for underwater acoustic sensor networks. J. Network Comput. Appl. 2016, 75, 385–397. [Google Scholar] [CrossRef]
- Molins, M.; Stojanovic, M. Slotted FAMA: A MAC protocol for underwater acoustic networks. In Proceedings of the OCEANS 2006—Asia Pacific, Singapore, 16–19 May 2007; pp. 1–7. [Google Scholar]
- Fullmer, C.L.; Garcia-Luna-Aceves, J. Floor acquisition multiple access (FAMA) for packet-radio networks. ACM SIGCOMM Comput. Commun. Rev. 1995, 25, 262–273. [Google Scholar] [CrossRef]
- Karn, P. MACA—A new channel access method for packet radio. In Proceedings of the ARRL/CRRL Amateur radio 9th computer networking conference, London, ON, Canada, 22 September 1990; pp. 134–140. [Google Scholar]
- Vieira, L.F.M.; Kong, J.; Lee, U.; Gerla, M. Analysis of aloha protocols for underwater acoustic sensor networks. In Proceedings of the Extended abstract from WUWNet, Los Angeles, CA, USA, 25 September 2006. [Google Scholar]
- Chirdchoo, N.; Soh, W.S.; Chua, K.C. ALOHA-based MAC protocols with collision avoidance for underwater acoustic networks. In Proceedings of the INFOCOM 26th IEEE International Conference on Computer Communications, Barcelona, Spain, 6–12 May 2007; pp. 2271–2275. [Google Scholar]
- Park, M.K.; Rodoplu, V. UWAN-MAC: An energy-efficient MAC protocol for underwater acoustic wireless sensor networks. J. Oceanic Eng. 2007, 32, 710–720. [Google Scholar] [CrossRef]
- Ghoreyshi, S.M.; Shahrabi, A.; Boutaleb, T. A novel cooperative opportunistic routing scheme for underwater sensor networks. Sensors 2016, 16, 297. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Le, S.N.; Peng, Z.; Cui, J.H. DOS: Distributed On-Demand Scheduling for High Performance MAC in Underwater Acoustic Networks; Technical Report UbiNet-TR13-07; University Connecticut: Storrs, CT, USA, 2013. [Google Scholar]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. Graph Colouring MAC Protocol for Underwater Sensor Networks. In Proceedings of the 32nd IEEE International Conference on Advanced Information Networking and Applications (AINA), Krakow, Poland, 16–18 May 2018. [Google Scholar]
- Zhu, Y.; Jiang, Z.; Peng, Z.; Zuba, M.; Cui, J.H.; Chen, H. Toward practical MAC design for underwater acoustic networks. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 683–691. [Google Scholar]
- Peleato, B.; Stojanovic, M. A MAC protocol for ad-hoc underwater acoustic sensor networks. In Proceedings of the 1st ACM international workshop on Underwater networks, Los Angeles, CA, USA, 29 September 2006; pp. 113–115. [Google Scholar]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. Efficient depth-based scheduling MAC protoco for underwater sensor networks. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 827–832. [Google Scholar]
- Han, Y.; Fei, Y. A delay-aware probability-based MAC protocol for underwater acoustic sensor networks. In Proceedings of the 2015 International Conference on Computing, Networking and Communications (ICNC), Garden Grove, CA, USA, 16–19 February 2015; pp. 938–944. [Google Scholar]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater acoustic wireless sensor networks: advances and future trends in physical, MAC and routing layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef] [PubMed]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. A CDMA-based medium access control for underwater acoustic sensor networks. IEEE Trans. Wireless Commun. 2009, 8, 1899–1909. [Google Scholar] [CrossRef]
- Van Hoesel, L.; Nieberg, T.; Kip, H.; Havinga, P.J. Advantages of a TDMA based, energy-efficient, self-organizing MAC protocol for WSNs. In Proceedings of the 2004 IEEE 59th Vehicular Technology Conference, Milan, Italy, 17–19 May 2004; pp. 1598–1602. [Google Scholar]
- Yackoski, J.; Shen, C.C. UW-FLASHR: Achieving high channel utilization in a time-based acoustic MAC protocol. In Proceedings of the third ACM international workshop on Underwater Networks, San Francisco, CA, USA, 14–19 September 2008; pp. 59–66. [Google Scholar]
- Kredo, K., II; Djukic, P.; Mohapatra, P. STUMP: Exploiting position diversity in the staggered TDMA underwater MAC protocol. In Proceedings of the IEEE INFOCOM 2009, Rio de Janeiro, Brazil, 19–25 April 2009; pp. 2961–2965. [Google Scholar]
- Luque-Nieto, M.A.; Moreno-Roldán, J.M.; Poncela, J.; Otero, P. Optimal fair scheduling in S-TDMA sensor networks for monitoring river plumes. J. Sens. 2016, 2016. [Google Scholar] [CrossRef]
- Luque-Nieto, M.Á.; Moreno-Roldán, J.M.; Otero, P.; Poncela, J. Optimal Scheduling and Fair Service Policy for STDMA in Underwater Networks with Acoustic Communications. Sensors 2018, 18, 612. [Google Scholar] [CrossRef] [PubMed]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Rev. 2004, 1, 3–8. [Google Scholar] [CrossRef]
- Peleato, B.; Stojanovic, M. Distance aware collision avoidance protocol for ad-hoc underwater acoustic sensor networks. IEEE Commun. Lett. 2007, 11, 1025–1027. [Google Scholar] [CrossRef]
- Noh, Y.; Lee, U.; Han, S.; Wang, P.; Torres, D.; Kim, J.; Gerla, M. DOTS: A propagation delay-aware opportunistic MAC protocol for mobile underwater networks. IEEE Trans. Mob. Comput. 2014, 13, 766–782. [Google Scholar] [CrossRef]
- Petrioli, C.; Petroccia, R.; Stojanovic, M. A comparative performance evaluation of MAC protocols for underwater sensor networks. In Proceedings of the OCEANS 2008, Quebec City, QC, Canada, 15–18 September 2008; pp. 668–698. [Google Scholar]
- Chirdchoo, N.; Soh, W.S.; Chua, K.C. RIPT: A receiver-initiated reservation-based protocol for underwater acoustic networks. IEEE J. Sel. Areas Commun. 2008, 26. [Google Scholar] [CrossRef]
- Samad, S.A.; Shenoy, S.; Kumar, G.S. Improving energy efficiency of underwater acoustic sensor networks using transmission power control: A cross-layer approach. In Proceedings of the International Conference on Advances in Computing and Communications, Kochi, India, 22–24 July 2011; pp. 93–101. [Google Scholar]
- Cho, J.; Shitiri, E.; Cho, H.S. Network Allocation Vector (NAV) Optimization for Underwater Handshaking-Based Protocols. Sensors 2017, 17, 32. [Google Scholar] [CrossRef] [PubMed]
- Peng, Z.; Zhou, Z.; Cui, J.H.; Shi, Z.J. Aqua-Net: An underwater sensor network architecture: Design, implementation, and initial testing. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–8. [Google Scholar]
- Zhou, Y.; Chen, K.; He, J.; Guan, H. Enhanced slotted aloha protocols for underwater sensor networks with large propagation delay. In Proceedings of the 2011 IEEE 73rd Vehicular Technology Conference, Yokohama, Japan, 15–18 May 2011; pp. 1–5. [Google Scholar]
- Syed, A.A.; Ye, W.; Heidemann, J. T-Lohi: A new class of MAC protocols for underwater acoustic sensor networks. In Proceedings of the IEEE INFOCOM 2008—The 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008; pp. 231–235. [Google Scholar]
- Peng, Z.; Zhu, Y.; Zhou, Z.; Guo, Z.; Cui, J.H. COPE-MAC: A contention-based medium access control protocol with parallel reservation for underwater acoustic networks. In Proceedings of the OCEANS’10 IEEE SYDNEY, Sydney, Australia, 24–27 May 2010; pp. 1–10. [Google Scholar]
- Han, Y.; Fei, Y. DAP-MAC: A delay-aware probability-based MAC protocol for underwater acoustic sensor networks. Ad Hoc Networks 2016, 48, 80–92. [Google Scholar] [CrossRef]
- Dinh, T.; Kim, Y.; Gu, T.; Vasilakos, A.V. L-MAC: A wake-up time self-learning MAC protocol for wireless sensor networks. Comput. Networks 2016, 105, 33–46. [Google Scholar] [CrossRef]
- Stojanovic, M. Optimization of a data link protocol for an underwater acoustic channel. Oceans Eur. 2005, 1, 68–73. [Google Scholar]
- Casari, P.; Zorzi, M. Protocol design issues in underwater acoustic networks. Comput. Commun. 2011, 34, 2013–2025. [Google Scholar] [CrossRef]
- Kredo II, K.B.; Mohapatra, P. A hybrid medium access control protocol for underwater wireless networks. In Proceedings of the second workshop on Underwater networks, Montreal, QB, Canada, 4–14 September 2007; pp. 33–40. [Google Scholar]
- Noh, Y.; Lee, U.; Wang, P.; Choi, B.S.C.; Gerla, M. VAPR: Void-aware pressure routing for underwater sensor networks. IEEE Trans. Mob. Comput. 2013, 12, 895–908. [Google Scholar] [CrossRef]
- Xie, P.; Zhou, Z.; Peng, Z.; Yan, H.; Hu, T.; Cui, J.H.; Shi, Z.; Fei, Y.; Zhou, S. Aqua-Sim: An NS-2 based simulator for underwater sensor networks. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–7. [Google Scholar]
- Yan, H.; Shi, Z.J.; Cui, J.H. DBR: Depth-based routing for underwater sensor networks. In Proceedings of the International conference on research in networking, Prague, Czech Republic, 21–25 May 2008; pp. 72–86. [Google Scholar]
- Jain, R.K.; Chiu, D.M.W.; Hawe, W.R. A Quantitative Measure of Fairness and Discrimination; Eastern Research Laboratory, Digital Equipment Corporation: Hudson, MA, USA, 1984. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Terms | Definition |
|---|---|
| Beacon packet | |
| Depth Priority List | |
| Offered traffic (packets/s) | |
| The depth of the network (m) | |
| underwater sensor node | |
| A node depth in the network (m) | |
| Node’s ID | |
| Maximum number of nodes per neighbourhood | |
| Number of slots | |
| Number of sub-slots | |
| Neighbouring table | |
| Transmission range (m) | |
| Schedule packet | |
| Predefined fixed value for the initial phase (s) | |
| Propagation delay (s) | |
| Predefined maximum delay (s) | |
| Guard time (s) | |
| Length of each round (s) | |
| Length of each slot (s) | |
| Length of each sub-slot (s) | |
| Scheduling timer of each node (s) | |
| Twake-up | The wake-up times of a node (s) |
| Speed of sound in water (m/s) |
| Parameter | Value |
|---|---|
| Transmission power | 2 Watts |
| Receiver power | 0.75 Watts |
| Idle power | 8 mW |
| Maximum transmission rage | 100 m |
| Bandwidth | 10 Kb/s |
| Acoustic propagation speed | 1500 m/s |
| Offered traffic | 0.1–1.0 packet/s |
| Node Number | 10–100 sensor nodes |
| Deployment region | 10,000 m2 × 200 m |
| 62,500 m2 × 500 m | |
| Movement model | RandomWalk 2D mobility model |
| Movement speed of nodes | 2 m/s, change movement |
| direction every 2 s | |
| Running rounds | 50 |
| Control packet size | 100 bits |
| Data packet size | 2000 bits |
| Length of the initial phase | 30 s |
| Length of the scheduling phase | 30 s |
| Simulation time of one round | 3600 s |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks. Sensors 2018, 18, 2806. https://doi.org/10.3390/s18092806
Alfouzan F, Shahrabi A, Ghoreyshi SM, Boutaleb T. An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks. Sensors. 2018; 18(9):2806. https://doi.org/10.3390/s18092806
Chicago/Turabian StyleAlfouzan, Faisal, Alireza Shahrabi, Seyed Mohammad Ghoreyshi, and Tuleen Boutaleb. 2018. "An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks" Sensors 18, no. 9: 2806. https://doi.org/10.3390/s18092806
APA StyleAlfouzan, F., Shahrabi, A., Ghoreyshi, S. M., & Boutaleb, T. (2018). An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks. Sensors, 18(9), 2806. https://doi.org/10.3390/s18092806