Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
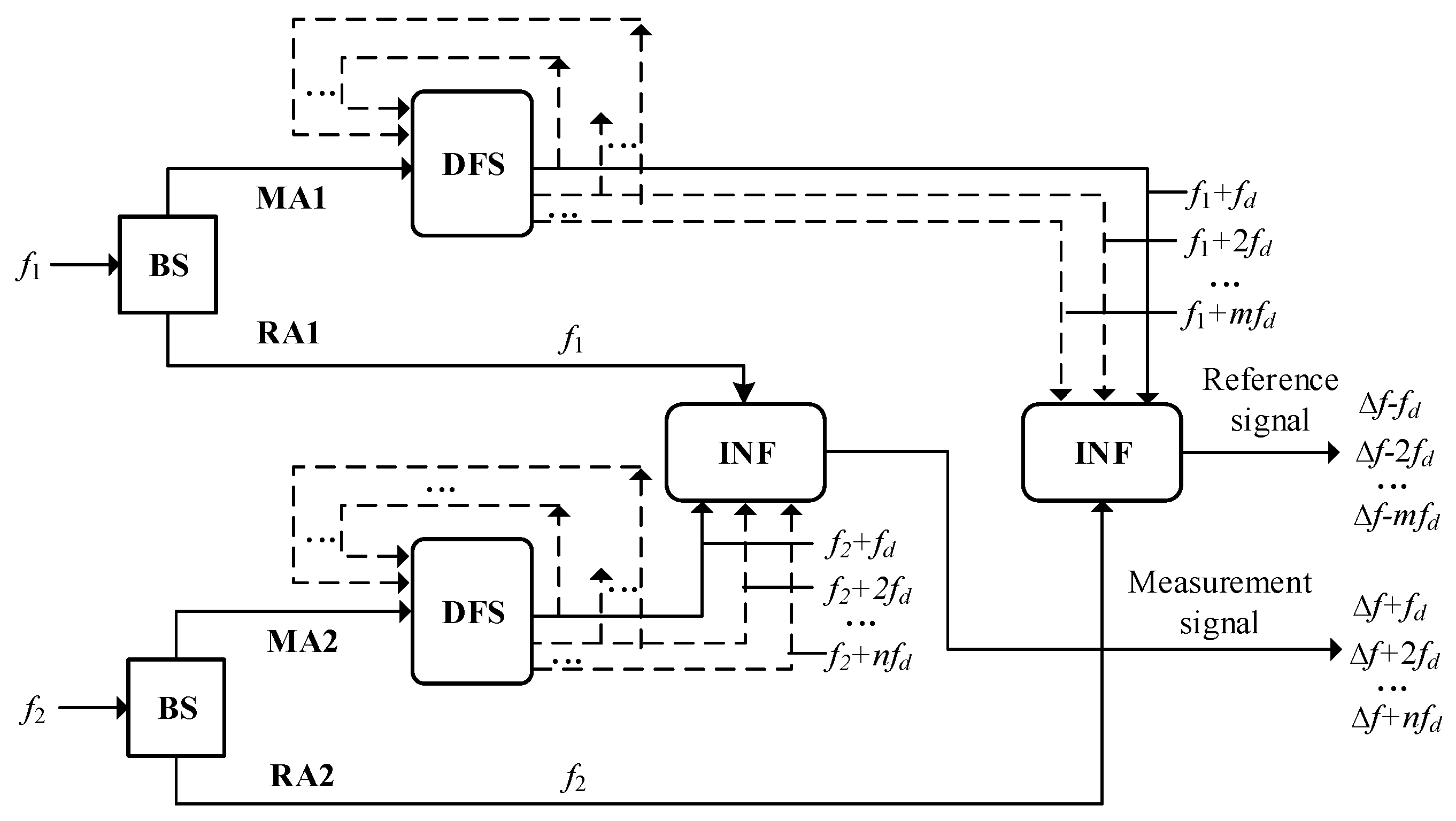
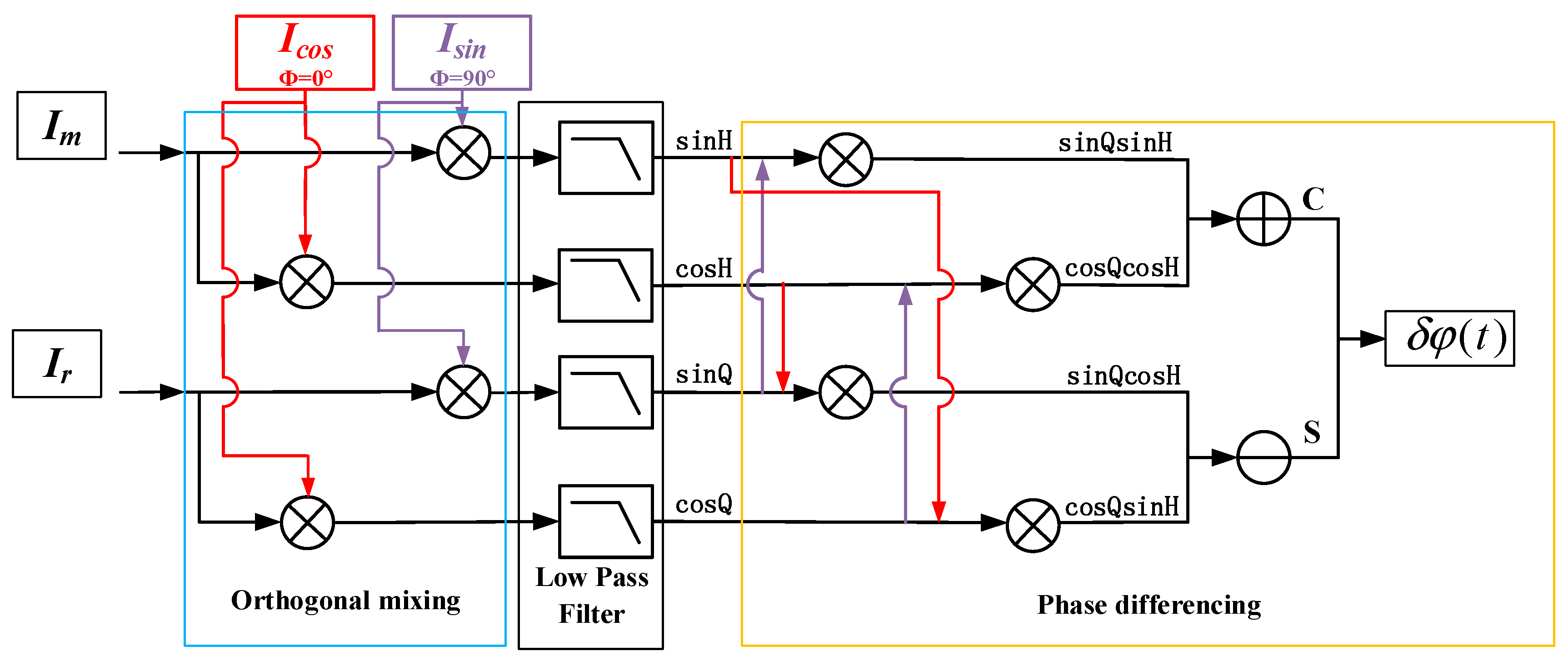
2. Measurement Method for Nonlinearity Based on Double-Channel Quadrature Demodulation
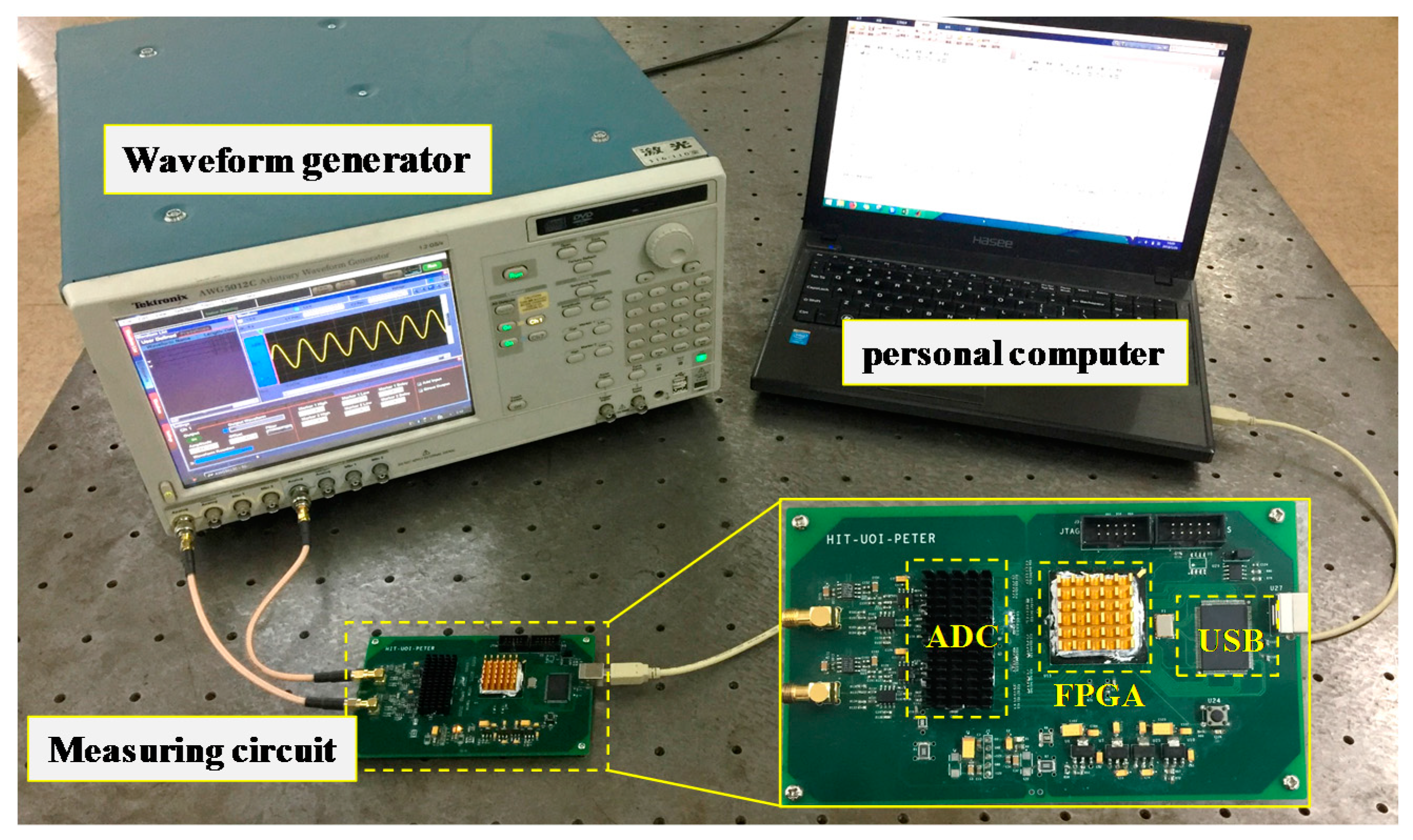
3. Experiment Validation
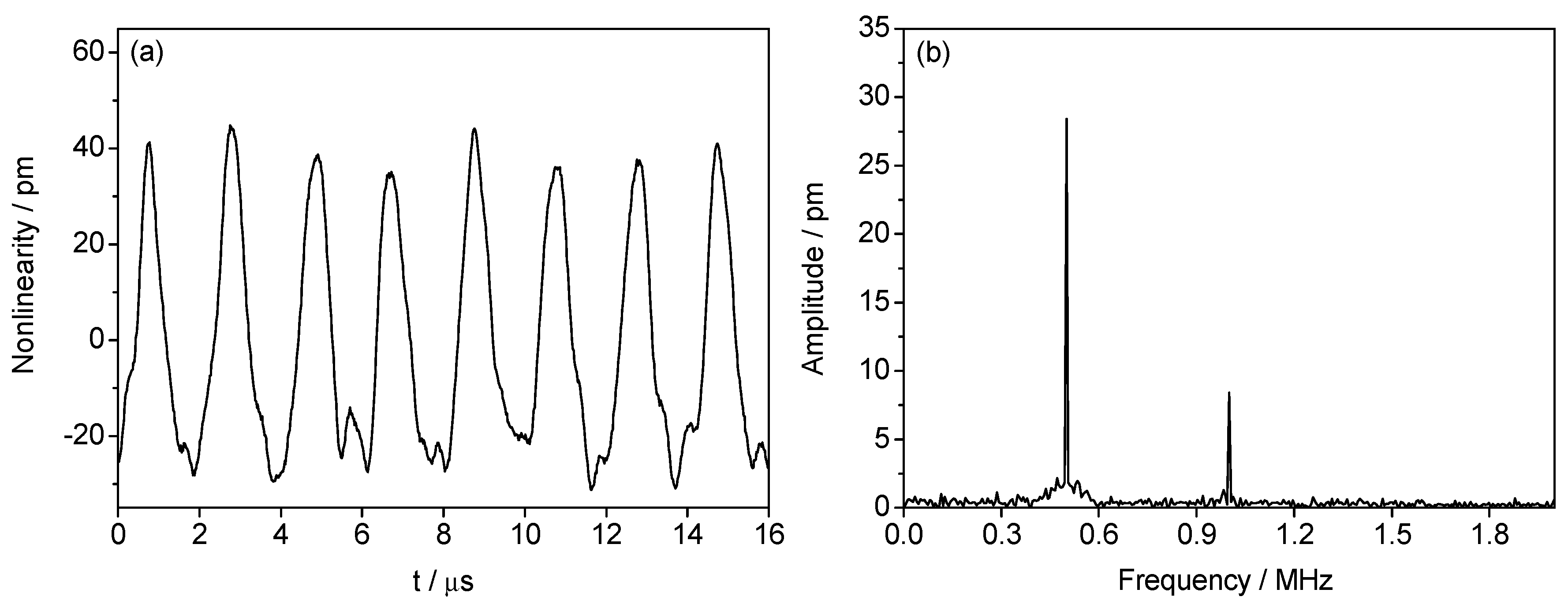
3.1. System Performance in Condition of Uniform Motion
3.2. System Performance in Condition of Non-Uniform Motion
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Estler, W.T. High-accuracy displacement interferometry refin air. Appl. Opt. 1985, 24, 808–815. [Google Scholar] [CrossRef] [PubMed]
- Bosse, H.; Wilkening, U. Developments at PTB in nanometrology for support of the semiconductor industry. Meas. Sci. Technol. 2005, 16, 2155–2166. [Google Scholar] [CrossRef]
- Manske, E.; Jäger, G.; Hausotte, T.; Fusharpl, R. Recent developments and challenges of nanopositioning and nanomeasuring technology. Meas. Sci. Technol. 2012, 23, 074001. [Google Scholar] [CrossRef]
- Meskers, A.J.; Voigt, D.; Spronck, J.W. Relative optical wavefront measurement in displacement measuring interferometer systems with sub-nm precision. Opt. Express 2013, 21, 17920–17930. [Google Scholar] [CrossRef] [PubMed]
- Sutton, C.M. Non-linearity in length measurement using heterodyne laser Michelson interferometry. J. Phys. E Sci. Instrum. 1987, 20, 1290–1292. [Google Scholar] [CrossRef]
- Wu, C.; Su, C. Nonlinearity in measurements of length by optical interferometry. Meas. Sci. Technol. 1996, 7, 62–68. [Google Scholar] [CrossRef]
- Cosijns, S.J.A.G.; Haitjema, H.; Schellekens, P.H.J. Modeling and verifying non-linearities in heterodyne displacement interferometry. Precis. Eng. 2002, 26, 448–455. [Google Scholar] [CrossRef]
- Badami, V.G.; Patterson, S.R. A frequency domain method for the measurement of nonlinearity in heterodyne interferometry. Precis. Eng. 2000, 24, 41–49. [Google Scholar] [CrossRef]
- Pisani, M.; Yacoot, A.; Balling, P.; Bancone, N.; Birlikseven, C.; Celik, M.; Flügge, J.; Hamid, R.; Köchert, P.; Kren, P.; et al. Comparison of the performance of the next generation of optical interferometers. Metrologia 2012, 49, 445–467. [Google Scholar] [CrossRef]
- Wu, C.; Lawall, J.; Deslattes, R.D. Heterodyne interferometer with subatomic periodic nonlinearity. Appl. Opt. 1999, 38, 4089–4094. [Google Scholar] [CrossRef] [PubMed]
- Seefeldt, J.D. Circuit to Reset a Phase Locked Loop after a Loss of Lock. U.S. Patent Grant No. 7423492, 9 September 2008. [Google Scholar]
- Joo, K.N.; Ellis, J.D.; Spronck, J.W.; van Kan, P.J.; Schmidt, R.H.M. Simple heterodyne laser interferometer with subnanometer periodic errors. Opt. Lett. 2009, 34, 386–388. [Google Scholar] [CrossRef] [PubMed]
- Weichert, C.; Köchert, P.; Köning, R.; Flügge, J.; Andreas, B. A heterodyne interferometer with periodic nonlinearities smaller than ±10 pm. Meas. Sci. Technol. 2012, 23, 2910–2916. [Google Scholar] [CrossRef]
- Bobroff, N. Recent advances in displacement measuring interferometry. Meas. Sci. Technol. 1993, 4, 907–926. [Google Scholar] [CrossRef]
- Quenelle, R.C. Nonlinearity in interferometer measurements. Hewlett-Packard J. 1983, 34, 10. [Google Scholar]
- Hou, W.; Wilkening, G. Investigation and compensation of the nonlinearity of heterodyne interferometers. Precis. Eng. 1992, 14, 91–98. [Google Scholar] [CrossRef]
- Hu, P.; Wang, Y.; Fu, H.; Zhu, J.; Tan, J. Nonlinearity error in homodyne interferometer caused by multi-order Doppler frequency shift ghost reflections. Opt. Express 2017, 25, 3605–3612. [Google Scholar] [CrossRef] [PubMed]
- Fu, H.; Wang, Y.; Hu, P.; Tan, J.; Fan, Z. Nonlinear errors resulting from ghost reflection and its coupling with optical mixing in heterodyne laser interferometers. Sensors 2018, 18, 758. [Google Scholar] [CrossRef] [PubMed]


© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, H.; Ji, R.; Hu, P.; Wang, Y.; Wu, G.; Tan, J. Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation. Sensors 2018, 18, 2768. https://doi.org/10.3390/s18092768
Fu H, Ji R, Hu P, Wang Y, Wu G, Tan J. Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation. Sensors. 2018; 18(9):2768. https://doi.org/10.3390/s18092768
Chicago/Turabian StyleFu, Haijin, Ruidong Ji, Pengcheng Hu, Yue Wang, Guolong Wu, and Jiubin Tan. 2018. "Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation" Sensors 18, no. 9: 2768. https://doi.org/10.3390/s18092768
APA StyleFu, H., Ji, R., Hu, P., Wang, Y., Wu, G., & Tan, J. (2018). Measurement Method for Nonlinearity in Heterodyne Laser Interferometers Based on Double-Channel Quadrature Demodulation. Sensors, 18(9), 2768. https://doi.org/10.3390/s18092768