Unmanned Aerial Vehicle Object Tracking by Correlation Filter with Adaptive Appearance Model


Abstract
1. Introduction
- (1)
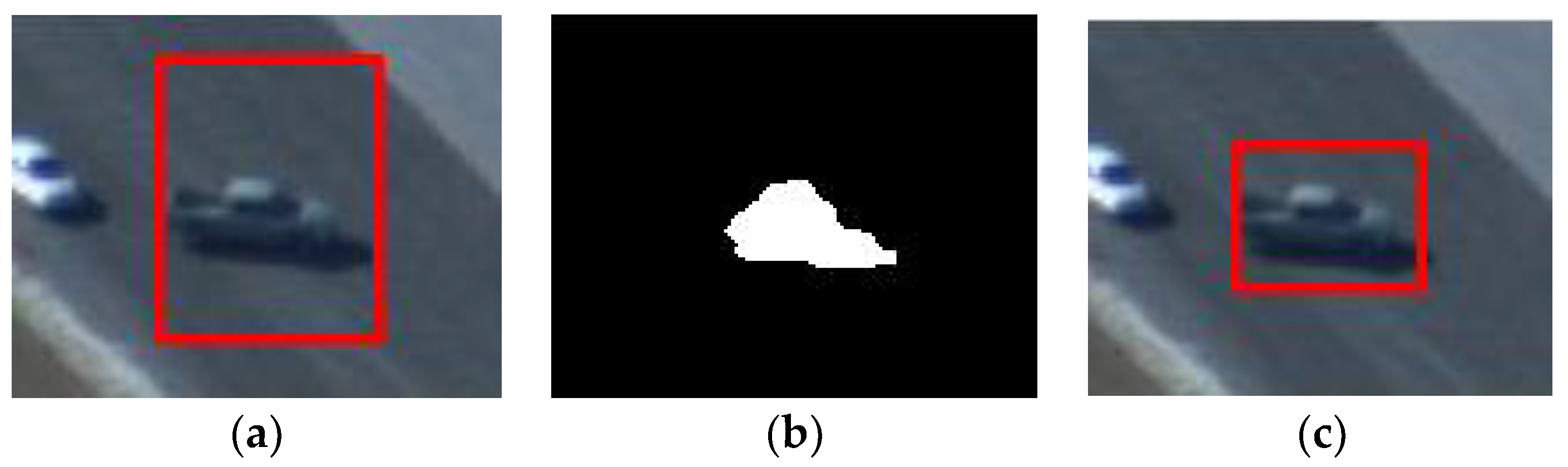
- In order to handle the scale variation and aspect ratio change, a novel propagation method based on cellular automata (CA) is introduced to update the appearance template of target adaptively and sparsely, which benefits from the consistency among similar image pixels.
- (2)
- A new adaptive template update scheme is proposed to further alleviate the problem of model drift which is caused by occlusion or distracter. The effectiveness of this approach is demonstrated through extensive comparisons against other methods.
2. Related Work
2.1. Correlation Filter Trackers
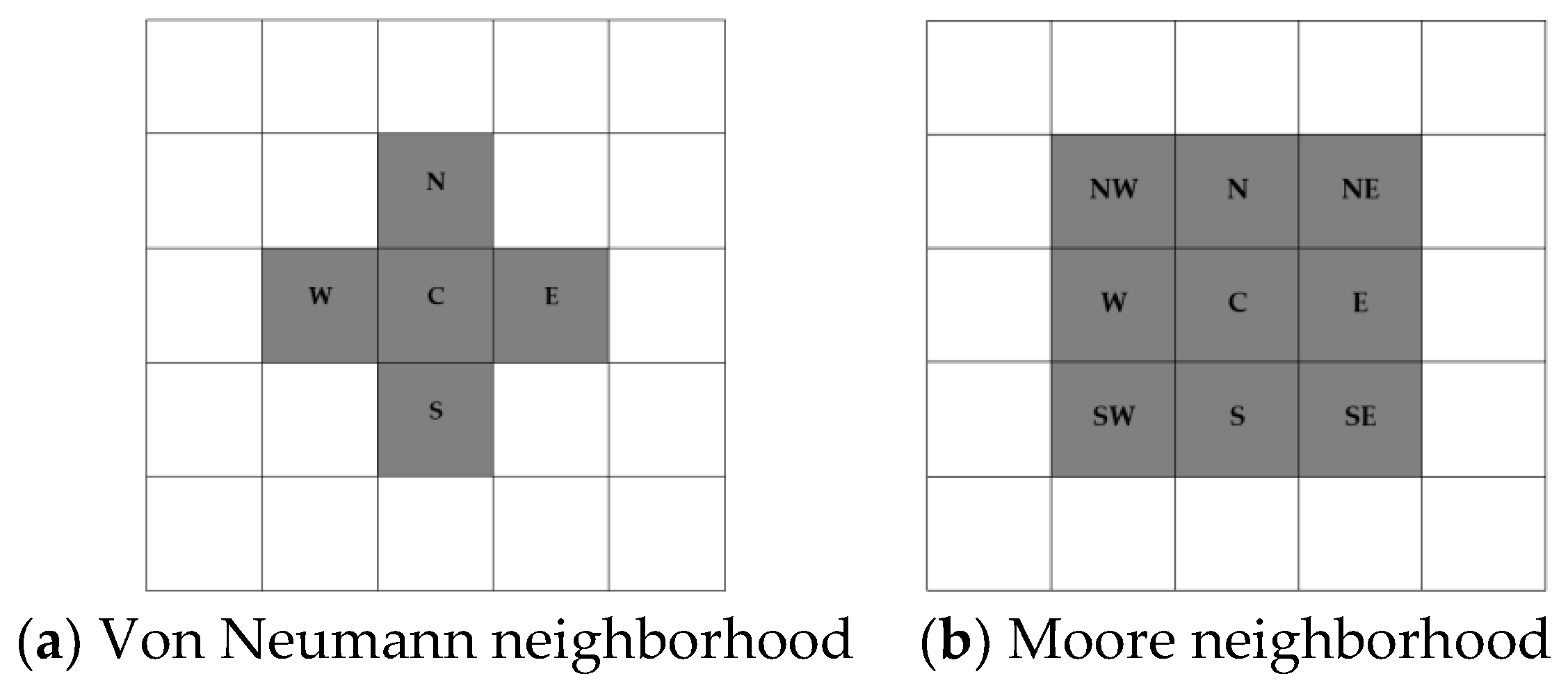
2.2. CA
2.3. Feature Selection in Correlation Tracking
3. Proposed Methods
3.1. Correlation Tracking through Fused Features
3.2. Adaptive Appearance Template Updating Based on CA
3.3. Model Updating via High Confidence
4. Experiment and Results
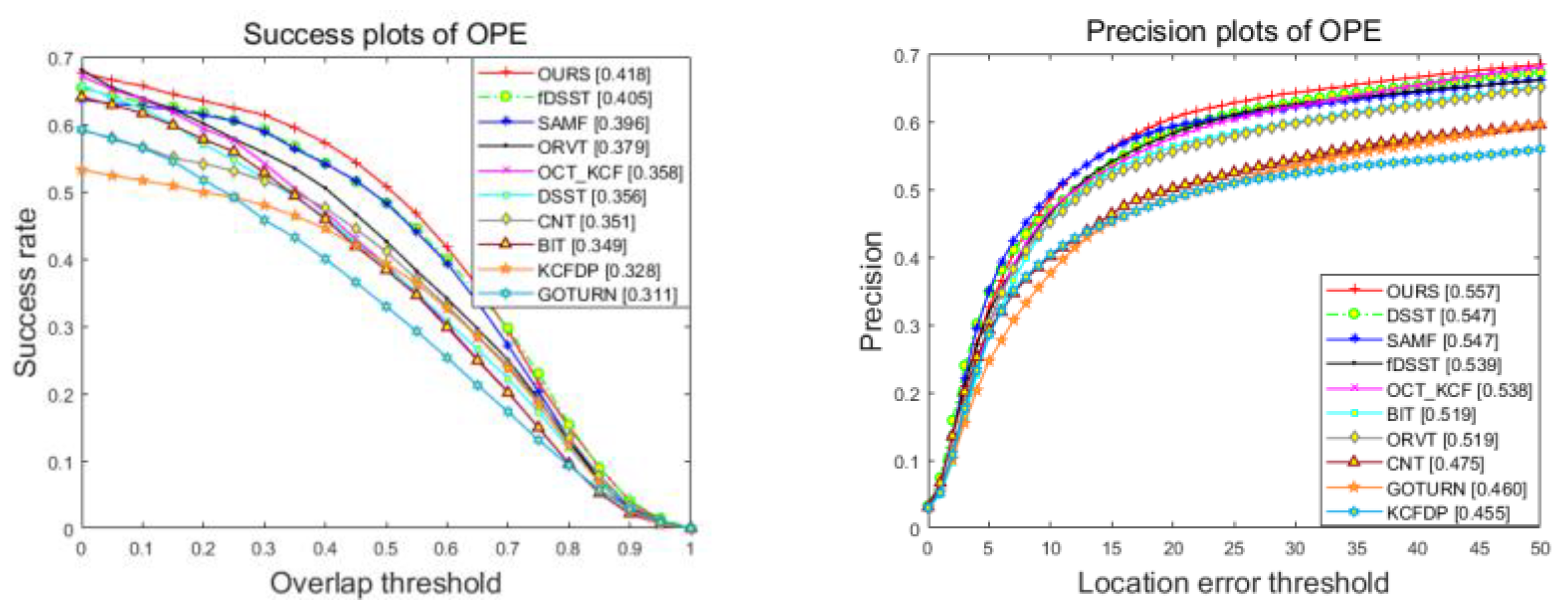
4.1. Quantitative Evaluation
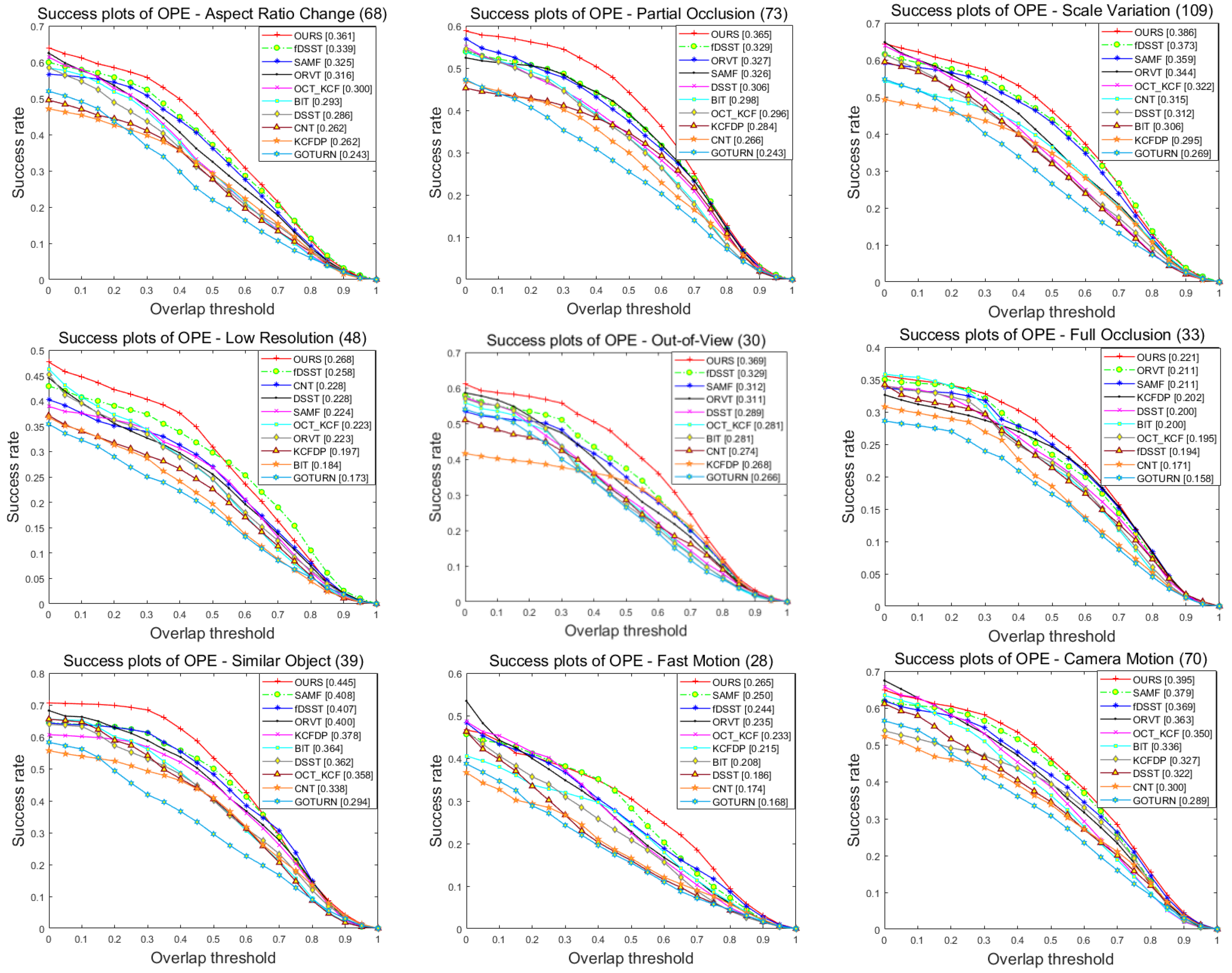
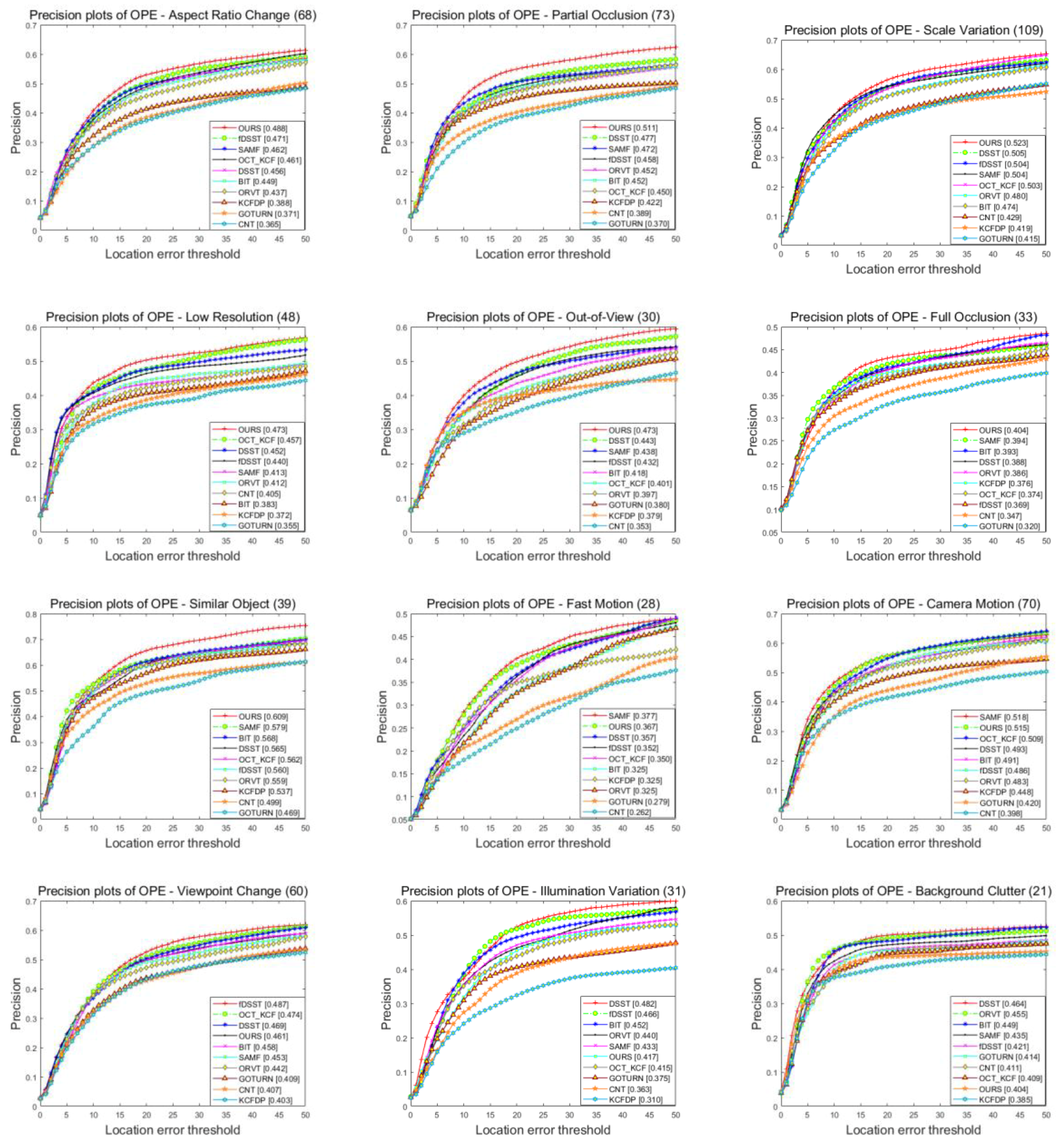
4.2. Attribute-Based Comparison
4.3. Qualitative Evaluation
5. Discussion
5.1. Speed Performance
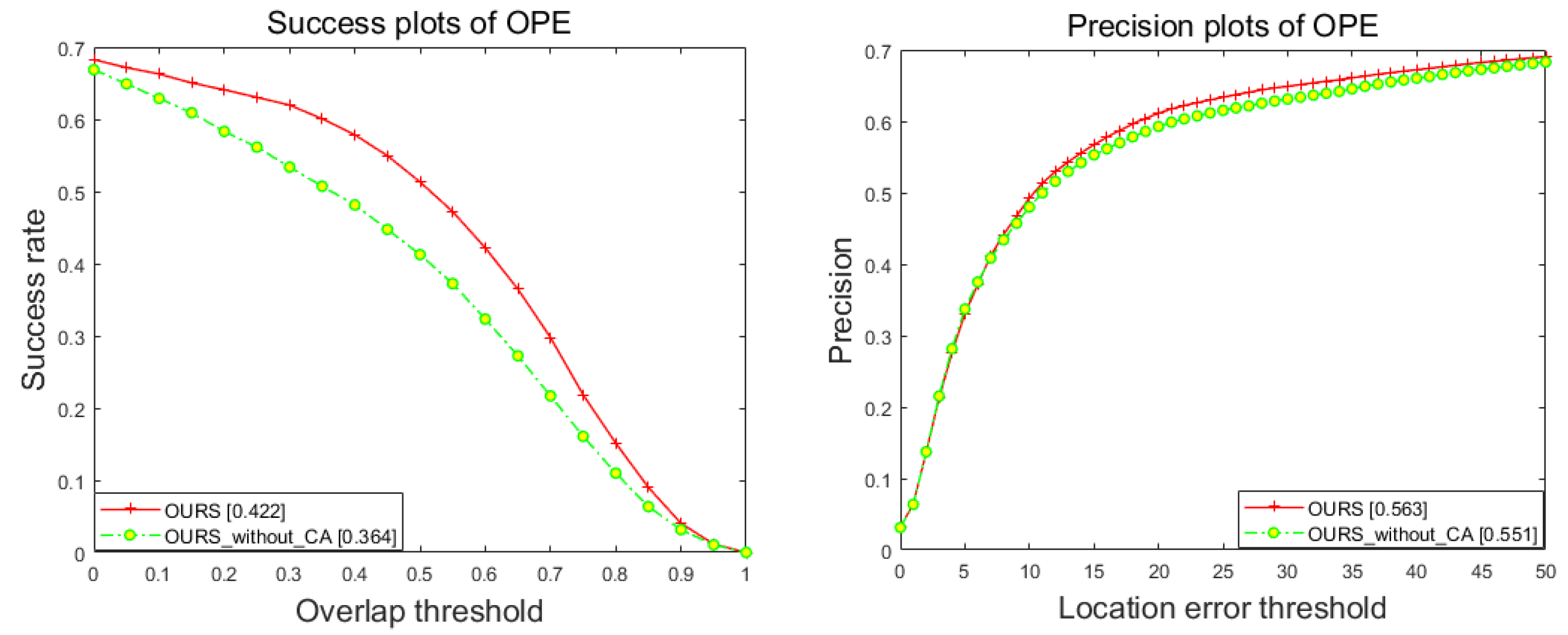
5.2. Effect of Adaptive Appearance Template Updating
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Kalal, Z.; Matas, J.; Mikolajczyk, K. Tracking-Learning-Detection. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 1409–1422. [Google Scholar] [CrossRef] [PubMed]
- Hare, S.; Saffari, A.; Torr, P.H.S. Struck: Structured Output Tracking with Kernels. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Barcelona, Spain, 6–13 November 2011; pp. 263–270. [Google Scholar]
- Lu, H.; Jia, X.; Yang, M.H. Visual tracking via adaptive structural local sparse appearance model. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Providence, RI, USA, 16–21 June 2012; pp. 1822–1829. [Google Scholar]
- Hosang, J.; Dollar, P.; Dollar, P. What Makes for Effective Detection Proposals? IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 814–830. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Liu, Z.; Weinberger, K.Q.; van der Marten, L. Densely connected convolutional networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2261–2269. [Google Scholar]
- Borji, A.; Cheng, M.; Hou, Q. Salient Object Detection: A Survey. arXiv, 2014; arXiv:1411.5878. [Google Scholar]
- Islam, M.M.; Hu, G.; Liu, Q. Online Model Updating and Dynamic Learning Rate-Based Robust Object Tracking. Sensors 2018, 18, 2046. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Zhang, S.; Qiao, X. Scene-Aware Adaptive Updating for Visual Tracking via Correlation Filters. Sensors 2017, 17, 2626. [Google Scholar] [CrossRef] [PubMed]
- Blake, A.; Isard, M. Active Contours: The Application of Techniques from Graphics, Vision, Control Theory and Statistics to Visual Tracking of Shapes in Motion; Springer Science Business Media: Berlin, Germany, 2012. [Google Scholar]
- Battiato, S.; Farinella, G.M.; Furnari, A.; Puglisi, G.; Snijders, A.; Spiekstra, J. An integrated system for vehicle tracking and classification. Expert Syst. Appl. 2015, 42, 7263–7275. [Google Scholar] [CrossRef]
- Andriluka, M.; Roth, S.; Schiele, B. People-tracking-by-detection and people-detection-by-tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Anchorage, AK, USA, 23–28 June 2008; pp. 1–8. [Google Scholar]
- Fu, C.; Duan, R.; Kircali, D. Onboard Robust Visual Tracking for UAVs Using a Reliable Global-Local Object Model. Sensors 2016, 16, 1406. [Google Scholar] [CrossRef] [PubMed]
- Fu, C.; Suarez-Fernandez, R.; Olivares-Mendez, M.; Campoy, P. Real-time adaptive multi-classifier multi-resolution visual tracking framework for unmanned aerial vehicles. In Proceedings of the 2nd Workshop on Research, Development and Education on Unmanned Aerial Systems (RED-UAS), Compiegne, France, 20–22 November 2013; pp. 99–106. [Google Scholar]
- Lim, H.; Sinha, S.N. Monocular localization of a moving person onboard a Quadrotor MAV. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2182–2189. [Google Scholar]
- Fu, C.; Carrio, A.; Olivares-Mendez, M.; Suarez-Fernandez, R.; Campoy, P. Robust real-time vision-based aircraft tracking from Unmanned Aerial Vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5441–5446. [Google Scholar]
- Ma, C.; Yang, X.; Zhang, C.; Yang, M.H. Long-term correlation tracking. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 5388–5396. [Google Scholar]
- Zhu, G.; Wang, J.; Wu, Y.; Lu, H. Collaborative Correlation Tracking. In Proceedings of the British Machine Vision Conference, Swansea, UK, 7–10 September 2015; pp. 184.1–184.12. [Google Scholar]
- Bolme, D.S.; Beveridge, J.R.; Draper, B.A.; Lui, Y.M. Visual object tracking using adaptive correlation filters. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), San Francisco, CA, USA, 13–18 June 2010; pp. 2244–2250. [Google Scholar]
- Henriques, F.; Caseiro, R.; Martins, P.; Batista, J. Exploiting the Circulant Structure of Tracking-by-Detection with Kernels. In Proceedings of the European Conference on Computer Vision (ECCV), Florence, Italy, 7–13 October 2012; pp. 702–715. [Google Scholar]
- Boddeti, V.N.; Kanade, T.; Kumar, B.V. Correlation filters for object alignment. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2291–2298. [Google Scholar]
- Zhang, B.; Luan, S.; Chen, C.; Han, J.; Wang, W.; Perina, A.; Ling, S. Latent constrained correlation filter. IEEE Trans. Image Process. 2018, 27, 1038–1048. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Chen, C.; Wang, H.; Zhang, B.; Han, J. Adaptive Multi-class Correlation Filters. In Advances in Multimedia Information Processing—PCM; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Nam, H.; Han, B. Learning multi-domain convolutional neural networks for visual tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 4293–4302. [Google Scholar]
- Held, D.; Thrun, S.; Savarese, S. Learning to track at 100 fps with deep regression networks. In Proceedings of the 2016 European Conference on Computer Vision, Amsterdam, The Netherlands, 11–14 October 2016; pp. 749–765. [Google Scholar]
- Zhu, Z.; Wu, W.; Zou, W.; Yan, J. End-to-end flow correlation tracking with spatial-temporal attention. illumination. arXiv, 2017; arXiv:1711.01124v1. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Henriques, J.F. Fully-convolutional siamese networks for object tracking. In Proceedings of the 2016 European Conference on Computer Vision, Amsterdam, The Netherlands, 8–10 October 2016; pp. 850–865. [Google Scholar]
- Cai, B.; Xu, X.; Xing, X.; Jia, K.; Miao, J.; Tao, D. BIT: Biologically Inspired Tracker. IEEE Trans. Image Process. 2016, 25, 1327–1339. [Google Scholar] [CrossRef] [PubMed]
- Danelljan, M.; Khan, F.S.; Felsberg, M.; van de Weijer, J. Adaptive Color Attributes for Real-Time Visual Tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 1090–1097. [Google Scholar]
- Henriques, F.; Caseiro, R.; Martins, P.; Batista, J. High-Speed Tracking with Kernelized Correlation Filters. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 583–596. [Google Scholar] [CrossRef] [PubMed]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Accurate scale estimation for robust visual tracking. In Proceedings of the British Machine Vision Conference (BMVC), Nottingham, UK, 1–5 September 2014; pp. 65.1–65.11. [Google Scholar]
- Bertinetto, L.; Valmadre, J.; Golodetz, S.; Miksik, O.; Torr, P.H.S. Staple: Complementary Learners for Real-Time Tracking. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1401–1409. [Google Scholar]
- Danelljan, M.; Hager, G.; Khan, F.S.; Felsberg, M. Learning Spatially Regularized Correlation Filters for Visual Tracking. In Proceedings of the 2016 IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2016; pp. 4310–4318. [Google Scholar]
- Danelljan, M.; Bhat, G.; Khan, F.S.; Felsberg, M. ECO: Efficient Convolution Operators for Tracking. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 6931–6939. [Google Scholar]
- Von Neumann, J. The general and logical theory of automata. In Cerebral Mechanisms in Behavior; Wiley: Oxford, UK, 1951; pp. 1–41. [Google Scholar]
- Qin, Y.; Lu, H.; Xu, Y.; Wang, H. Saliency detection via Cellular Automata. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 110–119. [Google Scholar]
- Khan, R.; Weijer, J.V.D.; Khan, F.S.; Muselet, D.; Ducottet, C.; Barat, C. Discriminative Color Descriptors. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 2866–2873. [Google Scholar]
- Wang, M.; Liu, Y.; Huang, Z. Large Margin Object Tracking with Circulant Feature Maps. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4800–4808. [Google Scholar]
- Mueller, M.; Smith, N.; Ghanem, B. A Benchmark and Simulator for UAV Tracking. In Proceedings of the 2016 European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 445–461. [Google Scholar]
- Danelljan, M.; Häger, G.; Khan, F.S.; Felsberg, M. Discriminative Scale Space Tracking. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1561–1575. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Luo, L.; Wen, M.; Chen, Z. Enable Scale and Aspect Ratio Adaptability in Visual Tracking with Detection Proposals. In Proceedings of the 2015 British Machine Vision Conference, Swansea, UK, 7–10 September 2015; pp. 185.1–185.12. [Google Scholar]
- Li, Y.; Zhu, J. A Scale Adaptive Kernel Correlation Filter Tracker with Feature Integration. In Proceedings of the 2014 European Conference on Computer Vision, Zurich, Switzerland, 6–7 September 2014; pp. 254–265. [Google Scholar]
- Baochang, Z.; Zhigang, L.; Xianbin, C.; Qixiang, Y.; Chen, C.; Linlin, S.; Alessandro, P.; Rongrong, J. Output constraint transfer for kernelized correlation filter in tracking. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 693–703. [Google Scholar]
- Zhang, K.; Liu, Q.; Wu, Y. Robust visual tracking via convolutional networks without training. IEEE Trans. Image Process. 2016, 25, 1779–1792. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Lim, J.; Yang, M.H. Online object tracking: A benchmark. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, Portland, OR, USA, 23–28 June 2013; pp. 2411–2418. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ours | BIT | fDSST | KCFDP | SAMF | DSST | ORVT | CNT | GOTURN | OCT_KCF | |
|---|---|---|---|---|---|---|---|---|---|---|
| SV | 0.523 | 0.474 | 0.504 | 0.419 | 0.504 | 0.505 | 0.480 | 0.429 | 0.415 | 0.503 |
| ARC | 0.488 | 0.449 | 0.471 | 0.388 | 0.462 | 0.456 | 0.437 | 0.365 | 0.371 | 0.461 |
| LR | 0.473 | 0.383 | 0.440 | 0.372 | 0.413 | 0.452 | 0.412 | 0.405 | 0.355 | 0.457 |
| FM | 0.367 | 0.325 | 0.352 | 0.325 | 0.377 | 0.357 | 0.325 | 0.262 | 0.279 | 0.350 |
| FOC | 0.404 | 0.393 | 0.369 | 0.376 | 0.394 | 0.388 | 0.386 | 0.347 | 0.320 | 0.374 |
| POC | 0.511 | 0.452 | 0.458 | 0.422 | 0.472 | 0.477 | 0.452 | 0.386 | 0.370 | 0.450 |
| OV | 0.473 | 0.418 | 0.432 | 0.379 | 0.438 | 0.443 | 0.397 | 0.353 | 0.380 | 0.401 |
| BC | 0.404 | 0.449 | 0.421 | 0.385 | 0.435 | 0.464 | 0.455 | 0.411 | 0.414 | 0.409 |
| IV | 0.417 | 0.452 | 0.466 | 0.310 | 0.433 | 0.482 | 0.440 | 0.363 | 0.375 | 0.415 |
| VC | 0.461 | 0.458 | 0.487 | 0.403 | 0.453 | 0.469 | 0.442 | 0.407 | 0.409 | 0.474 |
| CM | 0.515 | 0.491 | 0.486 | 0.448 | 0.518 | 0.493 | 0.483 | 0.389 | 0.420 | 0.509 |
| SOB | 0.609 | 0.568 | 0.560 | 0.537 | 0.579 | 0.565 | 0.559 | 0.499 | 0.469 | 0.562 |
| Overall | 0.557 | 0.519 | 0.539 | 0.455 | 0.547 | 0.547 | 0.519 | 0.475 | 0.460 | 0.538 |
| Ours | BIT | fDSST | KCFDP | SAMF | DSST | ORVT | CNT | GOTURN | OCT_KCF | |
|---|---|---|---|---|---|---|---|---|---|---|
| SV | 0.386 | 0.306 | 0.373 | 0.295 | 0.359 | 0.312 | 0.344 | 0.315 | 0.269 | 0.322 |
| ARC | 0.361 | 0.293 | 0.339 | 0.262 | 0.325 | 0.286 | 0.316 | 0.262 | 0.243 | 0.300 |
| LR | 0.268 | 0.184 | 0.258 | 0.197 | 0.224 | 0.228 | 0.223 | 0.228 | 0.173 | 0.223 |
| FM | 0.265 | 0.208 | 0.244 | 0.215 | 0.250 | 0.186 | 0.235 | 0.174 | 0.168 | 0.223 |
| FOC | 0.221 | 0.200 | 0.194 | 0.202 | 0.211 | 0.200 | 0.211 | 0.171 | 0.158 | 0.195 |
| POC | 0.365 | 0.298 | 0.329 | 0.284 | 0.326 | 0.306 | 0.327 | 0.266 | 0.243 | 0.296 |
| OV | 0.369 | 0.281 | 0.329 | 0.268 | 0.312 | 0.289 | 0.311 | 0.274 | 0.266 | 0.281 |
| BC | 0.265 | 0.291 | 0.277 | 0.249 | 0.282 | 0.314 | 0.309 | 0.254 | 0.271 | 0.255 |
| IV | 0.311 | 0.301 | 0.347 | 0.209 | 0.309 | 0.307 | 0.331 | 0.245 | 0.251 | 0.284 |
| VC | 0.353 | 0.312 | 0.363 | 0.288 | 0.326 | 0.304 | 0.332 | 0.297 | 0.275 | 0.312 |
| CM | 0.395 | 0.336 | 0.369 | 0.327 | 0.379 | 0.332 | 0.363 | 0.300 | 0.289 | 0.350 |
| SOB | 0.445 | 0.364 | 0.407 | 0.378 | 0.408 | 0.362 | 0.400 | 0.338 | 0.294 | 0.358 |
| Overall | 0.418 | 0.349 | 0.405 | 0.328 | 0.396 | 0.356 | 0.379 | 0.351 | 0.311 | 0.358 |
| Target Size | Ours | BIT | fDSST | KCFDP | SAMF | DSST | ORVT | CNT | GOTURN | OCT_KCF | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| boat6 | 27 × 16 | 33 | 121 | 134 | 30 | 6 | 124 | 32 | 0.91 | 6.10 | 116 |
| car1 | 69 × 89 | 24 | 94 | 62 | 43 | 7 | 92 | 23 | 0.75 | 8.74 | 16 |
| car2 | 39 × 21 | 31 | 105 | 165 | 17 | 6 | 105 | 26 | 1.00 | 0.36 | 172 |
| car9 | 99 × 169 | 7 | 12 | 31 | 18 | 10 | 9 | 43 | 0.73 | 0.42 | 64 |
| car14 | 43 × 68 | 14 | 54 | 89 | 36 | 5 | 38 | 17 | 0.76 | 0.65 | 21 |
| person2 | 50 × 111 | 10 | 42 | 72 | 15 | 5 | 19 | 29 | 0.82 | 1.39 | 24 |
| person6 | 33 × 95 | 11 | 49 | 77 | 22 | 6 | 33 | 27 | 1.38 | 0.71 | 20 |
| person16 | 33 × 71 | 15 | 58 | 101 | 29 | 5 | 45 | 14 | 0.75 | 12 | 40 |
| person22 | 17 × 47 | 24 | 97 | 158 | 46 | 6 | 92 | 28 | 0.73 | 9.46 | 196 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, X.; Li, Y.; Shen, Q. Unmanned Aerial Vehicle Object Tracking by Correlation Filter with Adaptive Appearance Model. Sensors 2018, 18, 2751. https://doi.org/10.3390/s18092751
Xue X, Li Y, Shen Q. Unmanned Aerial Vehicle Object Tracking by Correlation Filter with Adaptive Appearance Model. Sensors. 2018; 18(9):2751. https://doi.org/10.3390/s18092751
Chicago/Turabian StyleXue, Xizhe, Ying Li, and Qiang Shen. 2018. "Unmanned Aerial Vehicle Object Tracking by Correlation Filter with Adaptive Appearance Model" Sensors 18, no. 9: 2751. https://doi.org/10.3390/s18092751
APA StyleXue, X., Li, Y., & Shen, Q. (2018). Unmanned Aerial Vehicle Object Tracking by Correlation Filter with Adaptive Appearance Model. Sensors, 18(9), 2751. https://doi.org/10.3390/s18092751