Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors


Abstract
1. Introduction
2. ICBM and LFBG Sensors
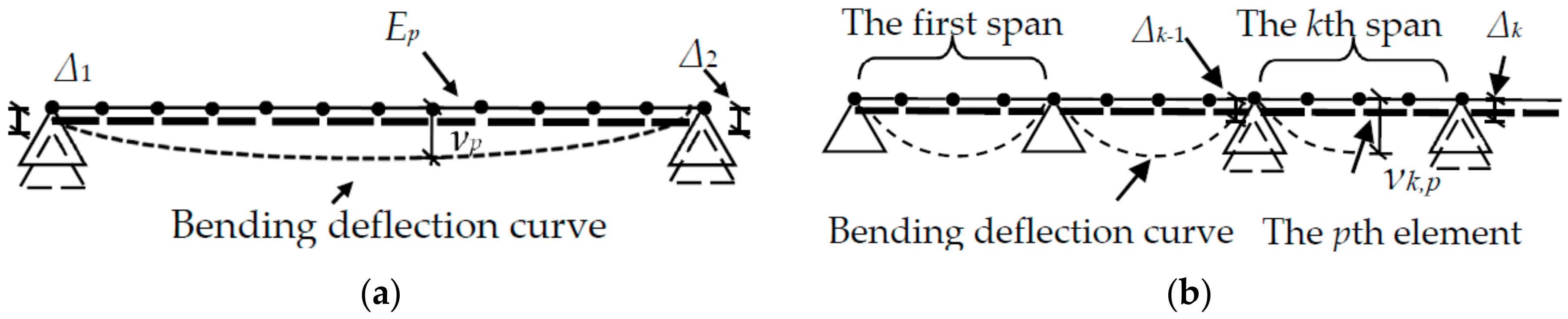
2.1. Improved Conjugated Beam Method
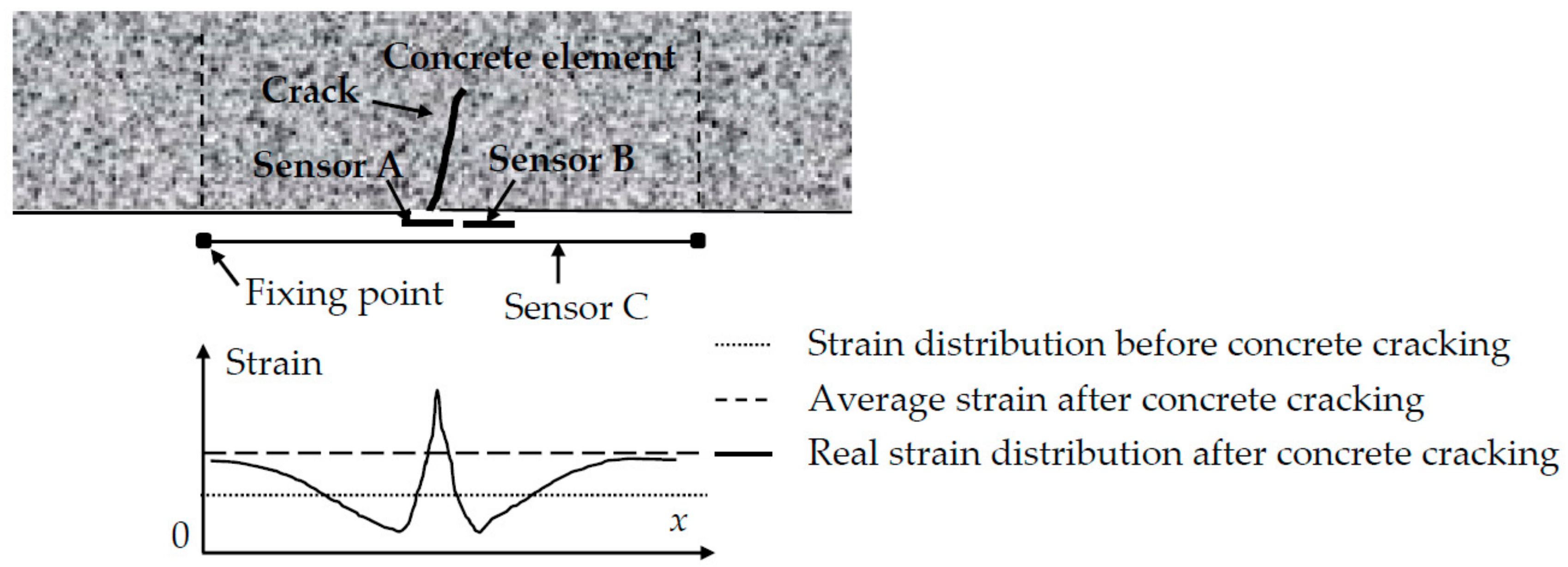
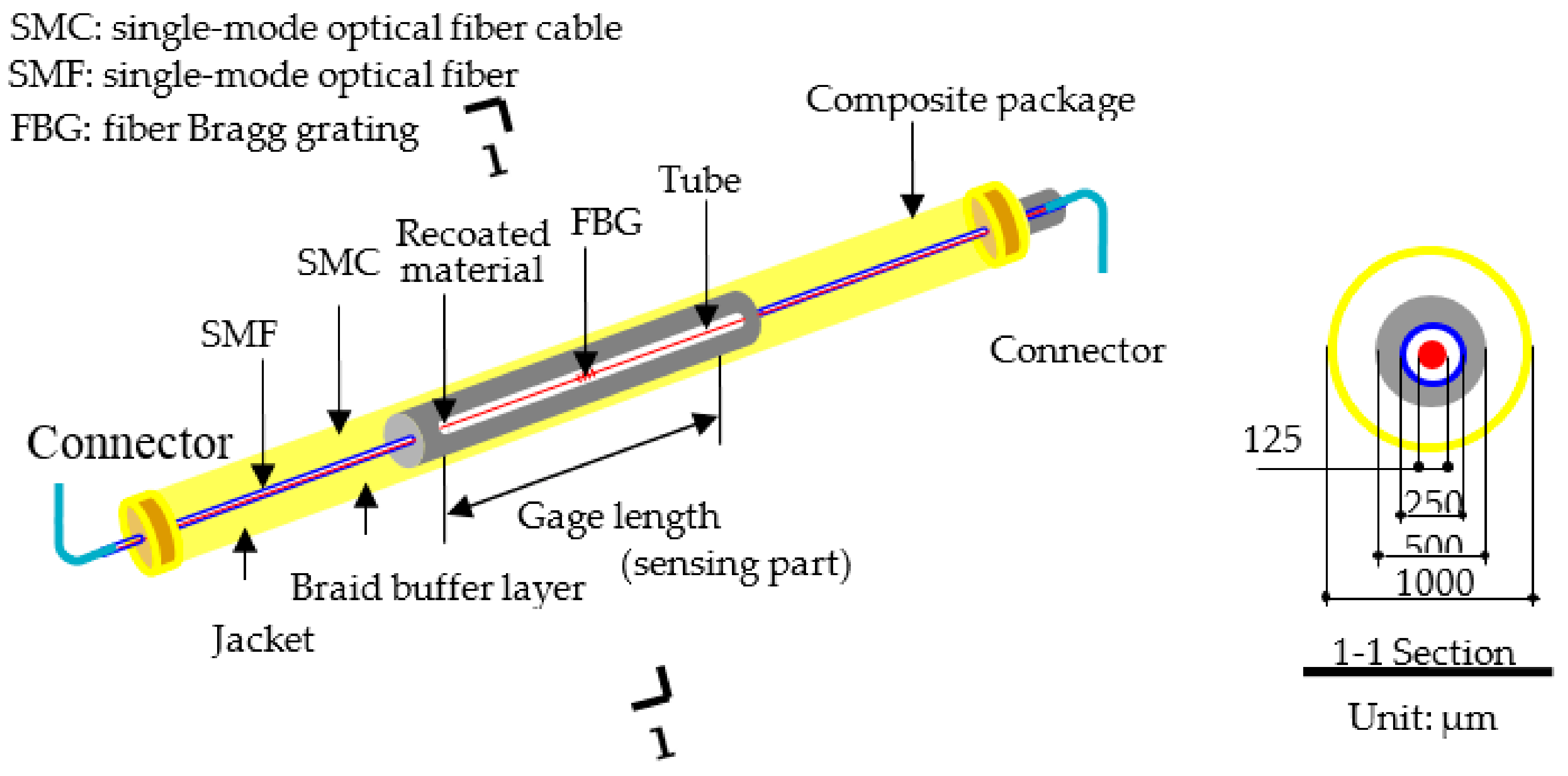
2.2. LFBG Strain Sensor
3. ICBM Modifications for Single-Cell Box Girders
3.1. AD1 Modification
3.2. AD2 Modification
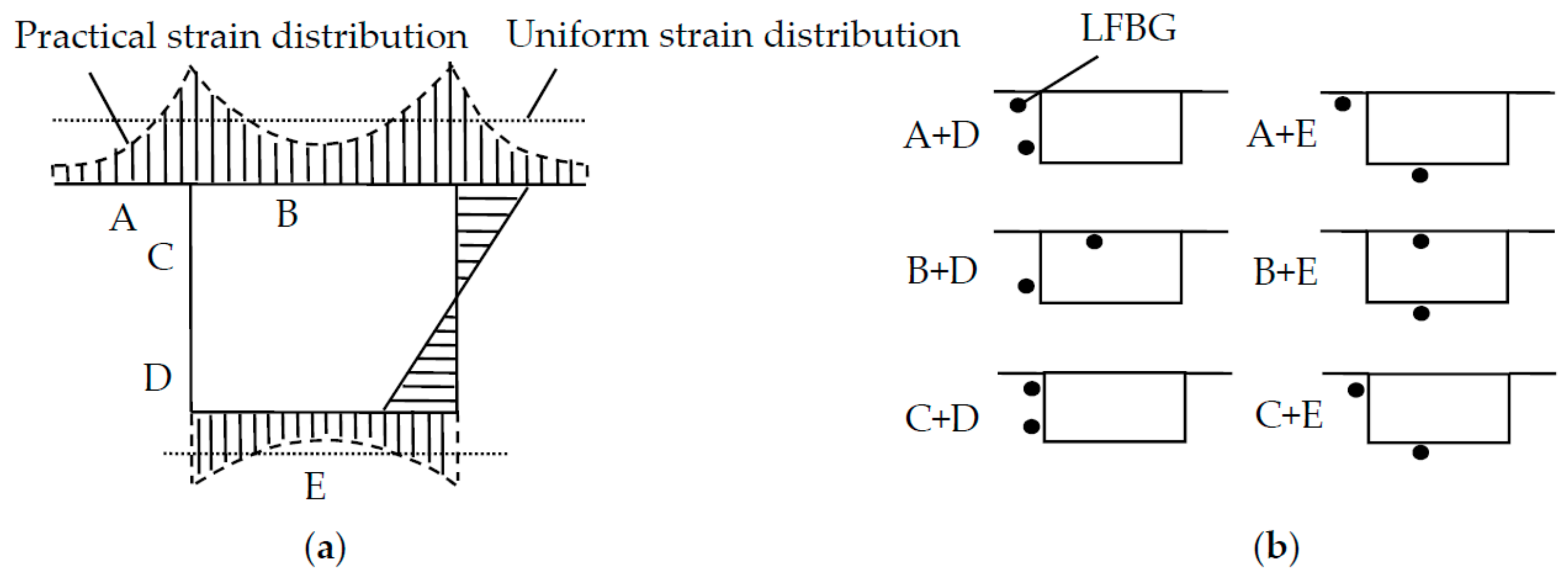
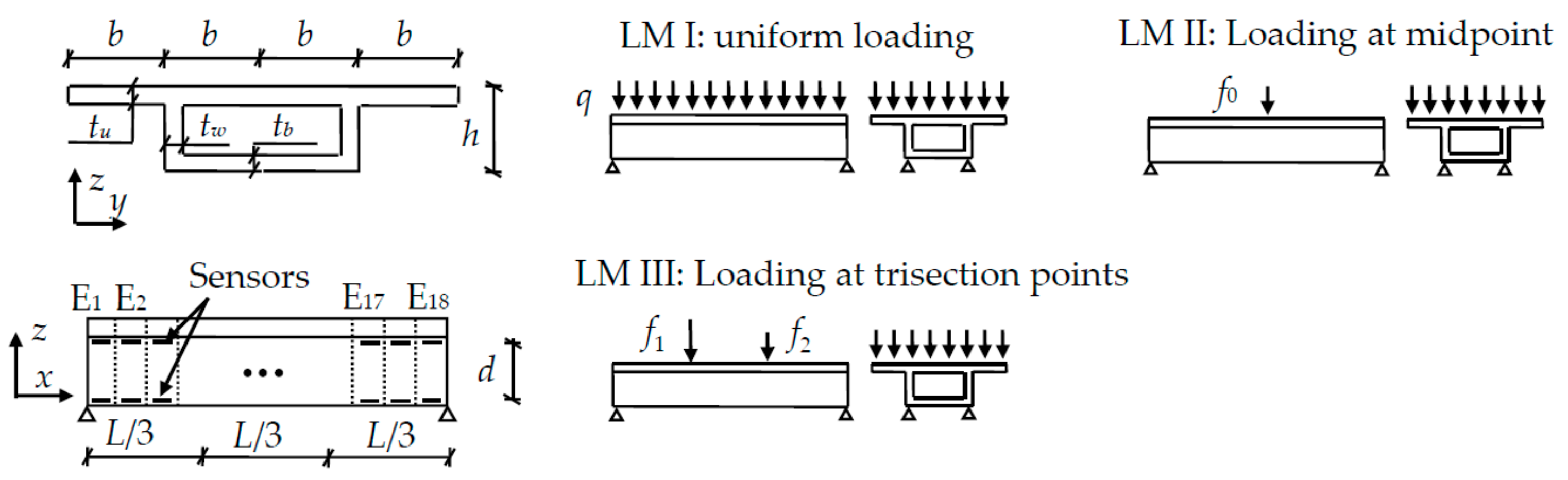
4. LFBG Sensor Placement in Box Girders
5. Verification of Revised ICBM: Numerical Simulation
5.1. Test Design
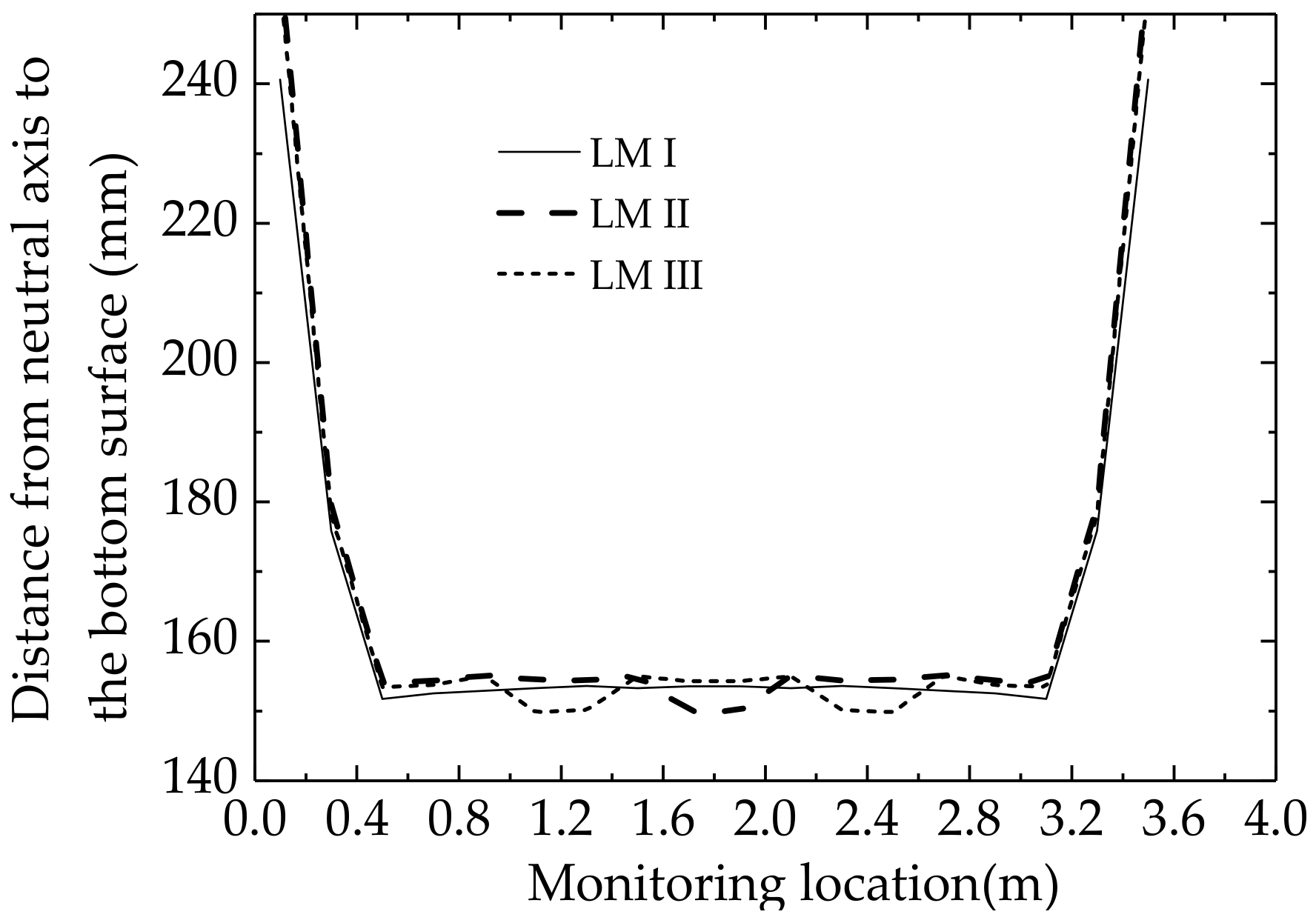
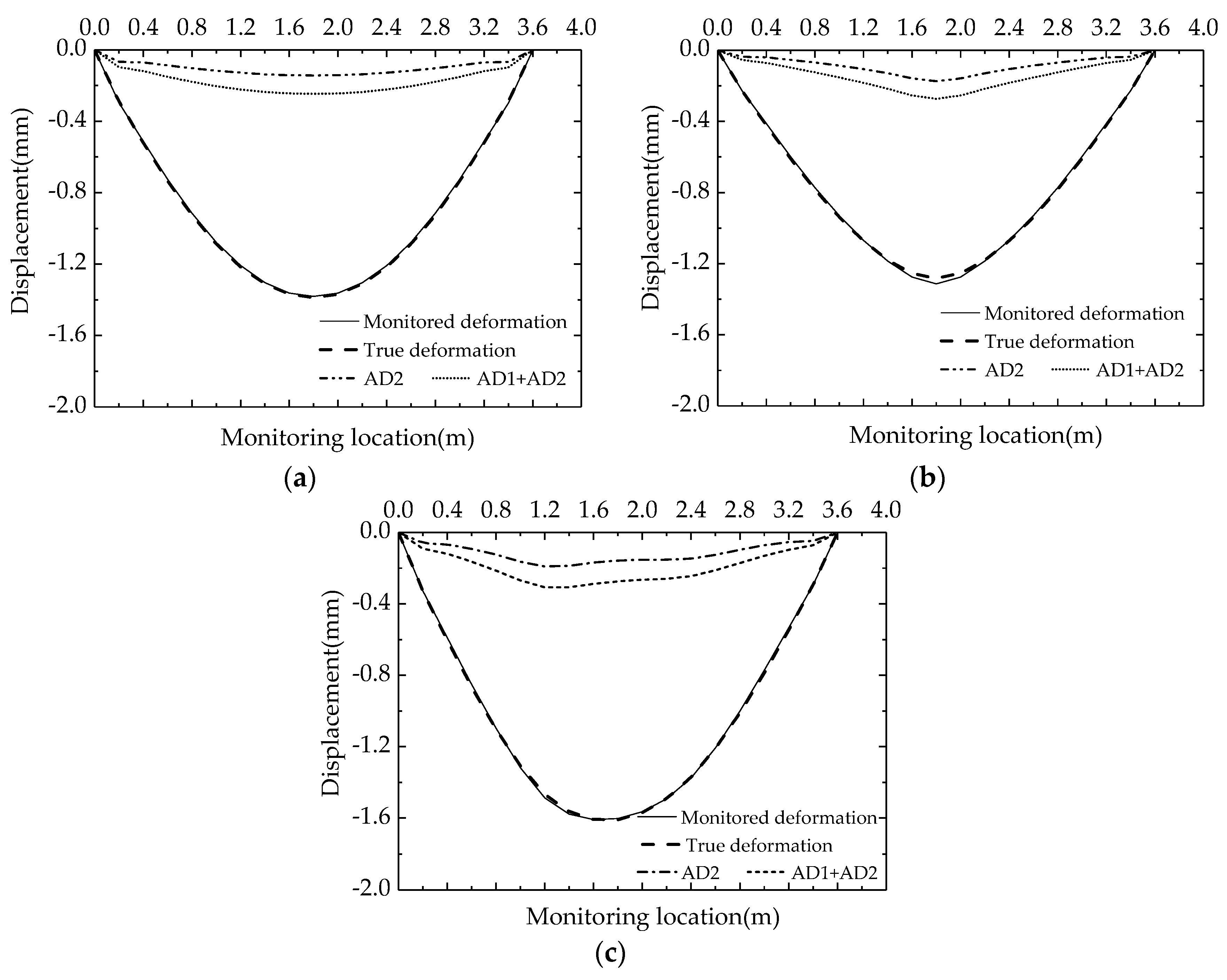
5.2. Results and Discussion
6. Verification of Revised ICBM: Experiment
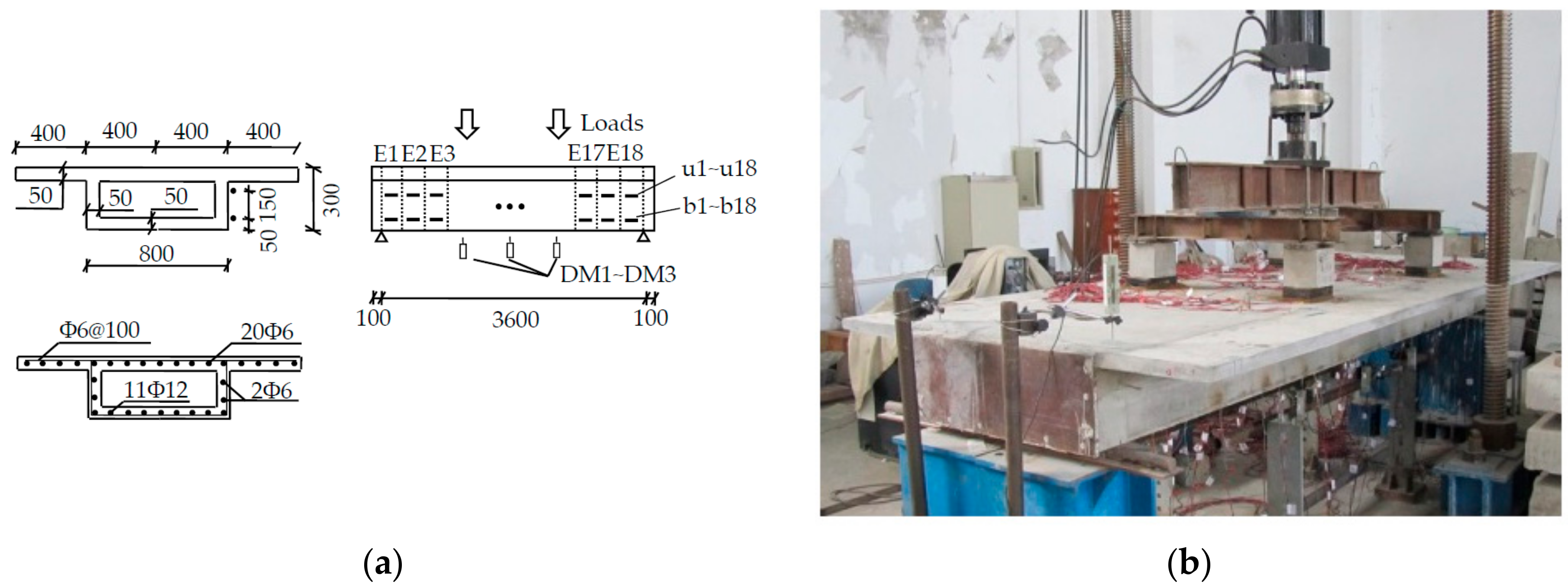
6.1. Test Setup and Sensor Placement
6.2. Results and Discussion
7. Conclusions
- (1)
- For a single-cell box girder, the revised ICBM is verified to be applicable to monitor the entire deformation. The revised ICBM presents a linear and explicit function between the deformation and the long-gage strain distribution. The deformation as considered in the revised ICBM contains the bending deflection, AD1 caused by shear lag, and AD2 caused by the shear action.
- (2)
- The LFBG sensor, a typical long-gage strain sensor, is used to accurately measure the strain distribution on the structural surface and provided a good balance between measurement accuracy and cost.
- (3)
- In the calculations, the shear lag coefficient λ can be approximated to be a constant value while still giving good precision in practice of the monitored deformation. Thus, the difficulty of investigating loading mode can be avoided.
- (4)
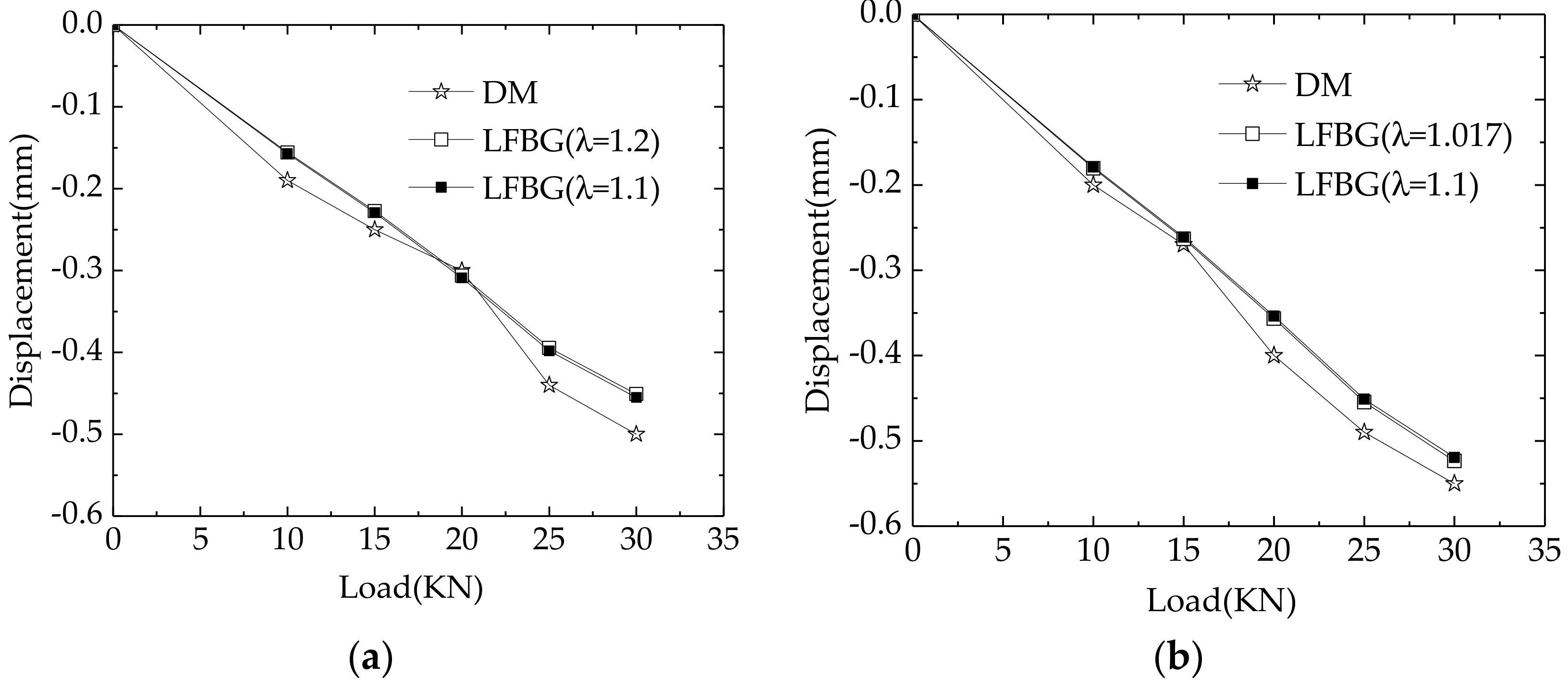
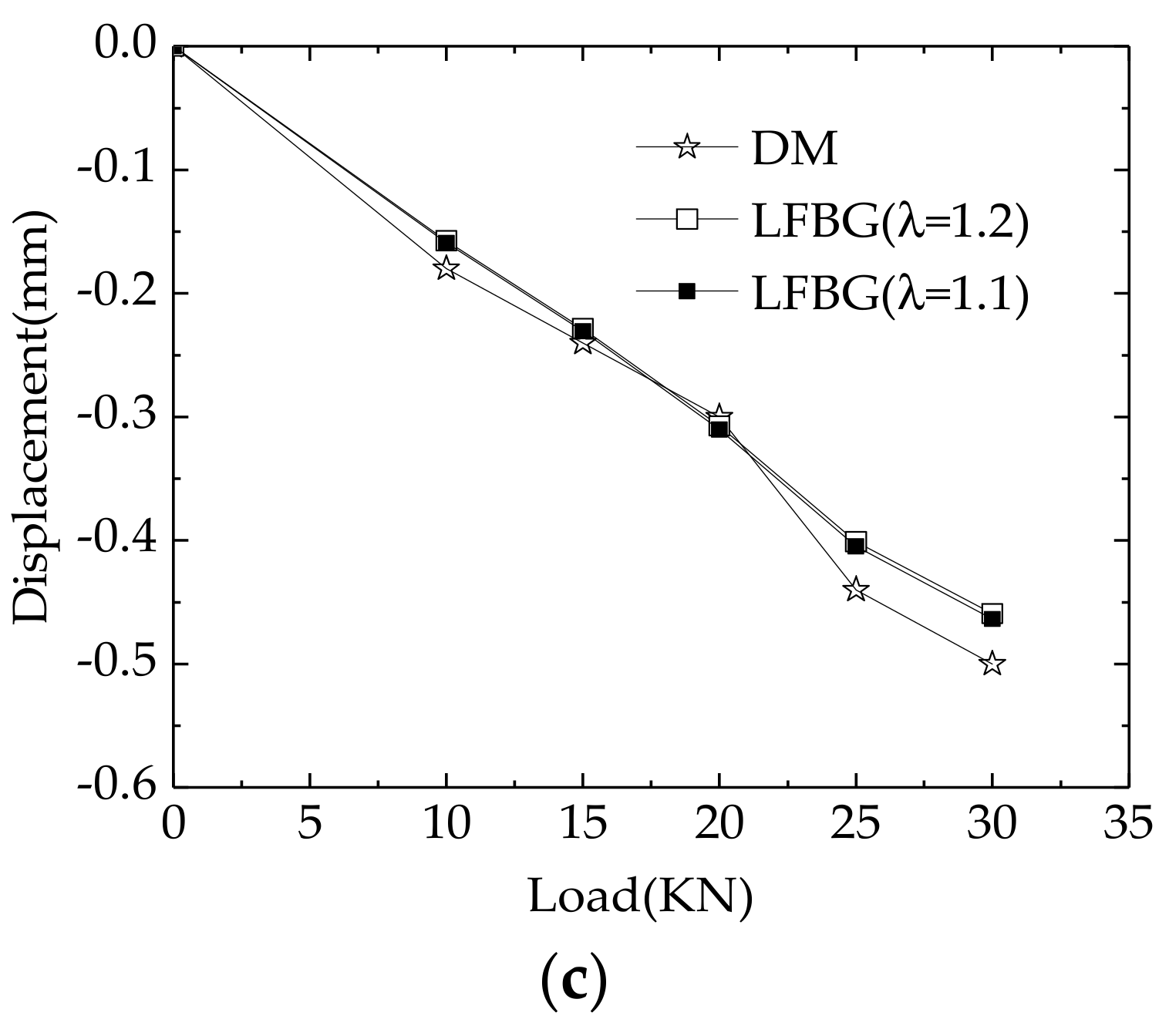
- Results from numerical simulations show that most algorithm errors are about 0.3–1.5%, and the maximum error is about 2.4%. Results from testing a single-cell box girder monitored by a series of LFBG sensors show that most of the practical errors ranged from 6–8%, and the maximum error is about 11%. Thus, for practical monitoring, the errors in monitored deformation are mainly induced by errors in the strain measurements rather than algorithm error from the revised ICBM.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mill, T.; Ellmann, A.; Kiisa, M.; Idnurm, J.; Idnurm, S.; Horemuz, M.; Aavik, A. Geodetic monitoring of bridge deformations occurring during static load testing. Balt. J. Road Bridge Eng. 2015, 10, 17–27. [Google Scholar] [CrossRef]
- Kuzina, E.; Rimshin, V. Deformation monitoring of road transport structures and facilities using engineering and geodetic techniques. In Proceedings of the International Scientific Conference Energy Management of Municipal Transportation Facilities and Transport (EMMFT2017), Khabarovsk, Russia, 10–13 April 2017. [Google Scholar]
- Yigit, C.O.; Coskun, M.Z.; Yavasoglu, H. The potential of GPS precise point positioning method for point displacement monitoring: A case study. Measurement 2016, 91, 398–404. [Google Scholar] [CrossRef]
- Chen, Q.; Jiang, W.; Meng, X.; Jiang, P.; Wang, K.; Xie, Y.; Ye, J. Vertical deformation monitoring of the suspension bridge tower Using GNSS: A Case Study of the Forth Road Bridge in the UK. Remote Sens. 2018, 10, 364–378. [Google Scholar] [CrossRef]
- Nguyen, V.H.; Schommer, S.; Maas, S.; Zürbes, A. Static load testing with temperature compensation for structural health monitoring of bridges. Eng. Struct. 2016, 127, 700–718. [Google Scholar] [CrossRef]
- Chen, Z.; Guo, T.; Yan, S. Life-cycle monitoring of long-span PSC box girder bridges through distributed sensor network: Strategies, methods, and applications. Shock Vib. 2015, 10, 497159. [Google Scholar] [CrossRef]
- Lõhmus, H.; Ellmann, A.; Märdla, S.; Ldnurm, S. Terrestrial laser scanning for the monitoring of bridge load tests—Two case studies. Surv. Rev. 2018, 50, 270–284. [Google Scholar] [CrossRef]
- Zhang, W.; Sun, L.M.; Sun, S.W. Bridge-Deflection Estimation through Inclinometer Data Considering Structural Damages. J. Bridge Eng. 2017, 22, 04016117. [Google Scholar] [CrossRef]
- Xu, H.; Ren, W.X.; Wang, Z.C. Deflection estimation of bending beam structures using fiber bragg grating strain sensors. Adv. Struct. Eng. 2015, 18, 96–104. [Google Scholar] [CrossRef]
- Vurpillot, S.; Inaudi, D.; Scano, A. Mathematical model for the determination of the vertical displacement from internal horizontal measurements of a bridge. In Proceedings of the SPIE 2719, Smart Structures and Materials 1996: Smart Systems for Bridges, Structures, and Highways, San Diego, CA, USA, 22 April 1996. [Google Scholar]
- Inaudi, D.; Casanova, N.; Vurpillot, S. Bridge deformation monitoring with fiber optic sensors. In Proceedings of the IABSE Symposium Structures for the Future the Search for Quality, Rio de Janeiro, Italy, 25–27 August 1999. [Google Scholar]
- Cho, N.-S.; Kim, N.-S. Estimating deflection of a simple beam model using fiber optic bragg-grating sensors. Exp. Mech. 2004, 44, 433–439. [Google Scholar] [CrossRef]
- Matta, F.; Galati, N.; Bastianini, F.; Casadei, P.; Nanni, A. Distributed strain and non-contact deflection measurement in multi-span highway bridge. In Proceedings of the Structural Faults & Repair, Edinburgh, UK, 13–15 June 2006. [Google Scholar]
- Kumagai, H.; Mita, A.; Oka, K.; Ohno, H. Development and verification of the fiber optic sensor for concrete structures. Concr. J. 2000, 38, 17–21. (In Japanese) [Google Scholar] [CrossRef]
- Shen, S.; Wu, Z.; Yang, C.; Wan, C.; Tang, Y.; Wu, G. An improved conjugated beam method for deformation monitoring with a distributed sensitive fiber optic sensor. Struct. Health Monit. 2010, 9, 361–378. [Google Scholar] [CrossRef]
- Lertsima, C.; Chaisomphob, T.; Yamaguchi, E.; Sa-nguanmanasak, J. Deflection of simply supported box girder including effect of shear lag. Comput. Struct. 2005, 84, 11–18. [Google Scholar] [CrossRef]
- Zhang, Y.; Lin, L.; Liu, Y. Influence of shear lag effect on deflection of box girder. Chin. J. Comput. Mech. 2012, 29, 625–630. (In Chinese) [Google Scholar]
- Zhou, W.; Jiang, L.; Liu, Z.; Liu, X. Closed-form solution to thin-walled box girders considering effects of shear deformation and shear lag. J. Cent. South Univ. 2012, 19, 2650–2655. [Google Scholar] [CrossRef]
- Li, H.J.; Ye, J.S.; Song, J.Y. Influence of shear deformation on deflection of box girder with corrugated steel webs. J. Traffic Transp. Eng. 2002, 2, 17–20. (In Chinese) [Google Scholar]
- Ye, X.W.; Su, Y.H.; Xi, P.S. Statistical Analysis of Stress Signals from Bridge Monitoring by FBG System. Sensors 2018, 18, 491. [Google Scholar]
- Xiao, F.; Chen, G.S.; Hulsey, J.L. Monitoring Bridge Dynamic Responses Using Fiber Bragg Grating Tiltmeters. Sensors 2017, 17, 2390. [Google Scholar] [CrossRef] [PubMed]
- Hu, D.T.; Guo, Y.X.; Chen, X.F.; Zhang, C.R. Cable Force Health Monitoring of Tongwamen Bridge Based on Fiber Bragg Grating. Appl. Sci. 2017, 7, 384. [Google Scholar] [CrossRef]
- Kong, X.; Ho, S.C.M.; Song, G.; Cai, C.S. Scour Monitoring System Using Fiber Bragg Grating Sensors and Water-Swellable Polymers. ASCE J. Bridge Eng. 2017, 22, 04017029. [Google Scholar] [CrossRef]
- Hou, Q.; Jiao, W.; Ren, L.; Cao, H.; Song, G. Experimental study of leakage detection of natural gas pipeline using FBG based strain sensor and least square support vector machine. J. Loss Prev. Process Ind. 2014, 32, 144–151. [Google Scholar] [CrossRef]
- Ren, L.; Jia, Z.G.; Li, H.N.; Song, G. Design and experimental study on FBG hoop-strain sensor in pipeline monitoring. Opt. Fiber Technol. 2014, 20, 15–23. [Google Scholar] [CrossRef]
- Hou, Q.; Ren, L.; Jiao, W.; Zou, P.; Song, G. An improved negative pressure wave method for natural gas pipeline leak location using FBG based strain sensor and wavelet transform. Math. Probl. Eng. 2013, 2013, 278794. [Google Scholar] [CrossRef]
- Zhao, X.; Li, W.; Song, G.; Zhu, Z.; Du, J. Scour monitoring system for subsea pipeline based on active thermometry: Numerical and experimental studies. Sensors 2013, 13, 1490–1509. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Xu, C.; Ho, S.C.M.; Wang, B.; Song, G. Monitoring concrete deterioration due to reinforcement corrosion by integrating acoustic emission and FBG strain measurements. Sensors 2017, 17, 657. [Google Scholar] [CrossRef] [PubMed]
- Mao, J.H.; Xu, F.Y.; Gao, Q.; Liu, S.L.; Jin, W.L.; Xu, Y.D. A Monitoring Method Based on FBG for Concrete Corrosion Cracking. Sensors 2016, 16, 1093. [Google Scholar] [CrossRef] [PubMed]
- Mao, J.H.; Chen, J.Y.; Cui, L.; Jin, W.L.; Xu, C.; He, Y. Monitoring the Corrosion Process of Reinforced Concrete Using BOTDA and FBG Sensors. Sensors 2015, 15, 8866–8883. [Google Scholar] [CrossRef] [PubMed]
- Li, S.; Wu, Z. Development of distributed long-gage fiber optic sensing system for structural health monitoring. Struct. Health Monit. 2007, 6, 133–145. [Google Scholar] [CrossRef]
- Li, S. Structural Health Monitoring Strategy Based on Distributed Fiber Optic Sensing. Ph.D. Thesis, Ibaraki University, Ibaraki, Japan, 2007. [Google Scholar]
- Hong, W.; Wu, Z.S.; Yang, C.Q.; Wan, C.; Wu, G. Investigation on the damage identification of bridges using distributed long-gauge dynamic macrostrain response under ambient excitation. J. Intell. Mater. Syst. Struct. 2012, 23, 85–103. [Google Scholar] [CrossRef]
- Wang, T.; Tang, Y.S. Dynamic displacement monitoring of flexural structures with distributed long-gage macro-strain sensors. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Tang, Y.S.; Ren, Z.D. Dynamic Method of Neutral Axis Position Determination and Damage Identification with Distributed Long-Gauge FBG Sensors. Sensors 2017, 7, 411. [Google Scholar] [CrossRef] [PubMed]
- Timoshenko, S. Strength of Materials (Part I: Elementary Theory and Problems), 3rd ed.; Van Nostrand Reinhold Company Ltd.: Berkshire, UK, 1955; pp. 170–175. ISBN 0-442-08539-7. [Google Scholar]
- Zhang, S.D.; Xie, Q. Shear lag coefficient of box gilder and suggestion for the design code. J. Chongqing Jiaotong Univ. 1986, 3, 114–128. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L/b1 | 6 | 8 | ≥10 |
|---|---|---|---|
| λ | 1.22 | 1.15 | 1.10 |
| LM | E1 | E2 | E3 | E4 | E5 | E6 | E7 | E8 | E9 | E10 | E11 | E12 | E13 | E14 | E15 | E16 | E17 | E18 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| I | −5 | −35 | −57 | −69 | −80 | −89 | −96 | −101 | −103 | −103 | −101 | −96 | −89 | −80 | −69 | −57 | −35 | −5 | |
| 128 | 83 | 88 | 108 | 126 | 141 | 153 | 160 | 164 | 164 | 160 | 153 | 141 | 126 | 108 | 88 | 83 | 130 | ||
| II | 2 | −18 | −33 | −44 | −55 | −68 | −83 | −101 | −130 | −130 | −101 | −83 | −68 | −55 | −44 | −33 | −18 | 2 | |
| 71 | 46 | 53 | 71 | 90 | 110 | 134 | 165 | 195 | 195 | 165 | 134 | 110 | 90 | 71 | 53 | 46 | 73 | ||
| III | 2 | −31 | −56 | −77 | −101 | −139 | −147 | −125 | −116 | −110 | −108 | −113 | −103 | −78 | −60 | −44 | −24 | 2 | |
| 119 | 77 | 89 | 123 | 165 | 208 | 221 | 204 | 187 | 179 | 177 | 175 | 159 | 128 | 97 | 71 | 61 | 97 | ||
| LM | Value of λ | Positions | ||
|---|---|---|---|---|
| 1/3 Span | Mid Span | 2/3 Span | ||
| I | λ = 1.1 | −0.6 | −0.4 | −0.6 |
| λ = accurate value | −0.5 | −0.1 | −0.5 | |
| II | λ = 1.1 | −0.3 | 2.4 | −0.3 |
| λ = accurate value | 0.5 | 0.6 | 0.5 | |
| III | λ = 1.1 | 1.5 | −0.3 | 0.3 |
| λ = accurate value | 0.3 | 0.4 | −0.6 | |
| Loading Step | E1 | E2 | E3 | E4 | E5 | E6 | E7 | E8 | E9 | E10 | E11 | E12 | E13 | E14 | E15 | E16 | E17 | E18 | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | −2 | −2 | −2 | −3 | −5 | −2 | −3 | −6 | −5 | −6 | −3 | −2 | −5 | −3 | −2 | −2 | −3 | 1 |
| 1 | 3 | 5 | 7 | 10 | 13 | 14 | 13 | 12 | 11 | 13 | 15 | 13 | 11 | 7 | 6 | 3 | 2 | ||
| 2 | −2 | −2 | −4 | −5 | −6 | −4 | −5 | −8 | −7 | −7 | −8 | −5 | −4 | −5 | −6 | −4 | −2 | 0 | |
| 1 | 2 | 7 | 11 | 15 | 18 | 20 | 19 | 18 | 17 | 19 | 21 | 19 | 13 | 12 | 7 | 2 | 0 | ||
| 3 | −3 | −3 | −5 | −7 | −9 | −6 | −7 | −11 | −10 | −10 | −11 | −7 | −9 | −8 | −4 | −3 | −2 | −2 | |
| 2 | 5 | 10 | 14 | 19 | 24 | 26 | 25 | 24 | 25 | 24 | 26 | 24 | 19 | 15 | 9 | 6 | 1 | ||
| 4 | −4 | −4 | −6 | −8 | −7 | −8 | −9 | −15 | −9 | −12 | −12 | −14 | −9 | −10 | −8 | −6 | −4 | −2 | |
| 4 | 7 | 11 | 21 | 20 | 33 | 35 | 33 | 27 | 33 | 34 | 35 | 28 | 30 | 22 | 10 | 9 | 5 | ||
| 5 | −4 | −5 | −7 | −9 | −7 | −9 | −10 | −17 | −10 | −15 | −16 | −9 | −9 | −13 | −9 | −7 | −5 | −2 | |
| 6 | 8 | 15 | 22 | 27 | 37 | 40 | 33 | 34 | 38 | 39 | 45 | 36 | 30 | 22 | 15 | 8 | 5 | ||
| Loading Step | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| Point A | λ = 1.1 | −10.2 | −8.2 | −6.4 | −9.5 | −9.0 |
| λ = 1.2 | −11.0 | −9.1 | −7.2 | −10.4 | −9.8 | |
| Point B | λ = 1.1 | −10.5 | −3.3 | −11.6 | −7.9 | −5.6 |
| λ = 1.017 | −9.8 | −2.5 | −10.9 | −7.2 | −4.8 | |
| Point C | λ = 1.1 | −9.1 | −3.9 | −6.0 | −8.0 | −7.3 |
| λ = 1.2 | −10.0 | −4.8 | −6.9 | −8.9 | −8.2 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, S.; Jiang, S.-F. Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors. Sensors 2018, 18, 2597. https://doi.org/10.3390/s18082597
Shen S, Jiang S-F. Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors. Sensors. 2018; 18(8):2597. https://doi.org/10.3390/s18082597
Chicago/Turabian StyleShen, Sheng, and Shao-Fei Jiang. 2018. "Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors" Sensors 18, no. 8: 2597. https://doi.org/10.3390/s18082597
APA StyleShen, S., & Jiang, S.-F. (2018). Distributed Deformation Monitoring for a Single-Cell Box Girder Based on Distributed Long-Gage Fiber Bragg Grating Sensors. Sensors, 18(8), 2597. https://doi.org/10.3390/s18082597