1. Introduction
During the past decade, as one of the key techniques of indoor location-based services (ILBS), accurate and inexpensive indoor localization problem has attracted a great deal of attention from academia and industry. Meanwhile, a mass of efforts and resources have also been devoted. Even thoguh many different indoor localization methods [
1,
2,
3,
4] have been proposed, this problem remains unsettled.
In this paper, we categorize the existing localization schemes primarily into two sets: fingerprinting-based and ranging-based. The former achieves indoor localization result by matching fingerprinting to a database; the fingerprint usually consisting of some existing indoor signals, such as WiFi [
5,
6], FM and TV [
7], GSM [
8], geo-magnetic [
9], or sound signals [
10,
11]. However, site-survey, an essential component of building a fingerprinting database, is a time-consuming and labor-intensive task. Furthermore, due to the influence of environmental dynamics, the fingerprinting database should be updated frequently. For the ranging-based approaches, accurately estimating indoor location requires a pre-deployed platform of custom hardwares such as bluetooth beacons [
12,
13], magnetic resonators [
14], ultrasound speakers [
15], and custom RF transmitters [
16]. However, to achieve high accuracy, a deployment of sophisticated and expensive anchors is required to calculate important information for location estimation, such as ToF [
2,
17], AoA [
3] etc., which imposes extra costs, and is unsuitable for consumer device. Meanwhile, the inevitable instability of signals and synchronous error in indoor environments will also damage the robustness and availability of locations. To resolve these problems, complex algorithms are required, resulting in high computation costs and battery consumption, which are tremendous challenges for the memory and computation limited devices.
As is well-known, an ideal indoor localization system should satisfy the following four conditions: (1) the system should be deployed once and for all; (2) it can be constructed using off-the-shelf devices; (3) the cost is low and it is easy to deploy; and (4) it can consistently provide accurate and reliable location information. However, to achieve these goals is not-trivial. Overall, fingerprinting-based approaches cannot satisfy the first, third, and fourth conditions, while the ranging-based approaches cannot satisfy the second and third conditions.
For the widely used WiFi signals, due to the interference of indoor environments, pure WiFi-based localization can achieve reasonable accuracy (e.g., 3–4 m), but there always exist large errors (e.g., 6–8 m), which are unacceptable for many scenarios. Many additional RF signals, such as Bluetooth, ultrasound, etc., have been utilized to improve accuracy; however, the creation and updating of fingerprinting database is time-consuming and labor-intensive. Besides, while the layout of environment changes, it is still a critical issue to make the system stable and quickly resume. Although many ranging-based WiFi localization system have been proposed and achieved a high accuracy, additional specialized hardware is often required, which incurs much costs and is not suitable for large-scale scenario. The need of additional modulated device also violates the principles of a ubiquitous application. Contrarily, acoustic-based localization has less stringent requirements on timing accuracy, and can be widely deployed to the commercial off-the-shelf (COTS) smartphones, which are equipped with at least one speaker and one microphone. Moreover, it also provides a higher localization accuracy under a low-cost infrastructure. Hence, in this paper, we choose acoustic signals for indoor location determination. However, due to the existence of many interference factors, acoustic-based localization methods have a worse performance on robustness. For example, as mentioned in
Section 3.2, there is a huge difference in accuracy when acoustic-based indoor localization method runs in different NLOS situations. According to the previous works, image-based localizations are impressively accurate at inferring relative distances and directions, and constructing a rigorous space relationship poses an opportunity to enhance the robustness and accuracy of acoustic-based localization methods.
In this paper, we propose SITE, a novel scheme that uses acoustic Signal and phone Images to achieve accurate and reliable indoor locaTion systEm. SITE uses fixed acoustic anchor to transmit acoustic signals that are inaudible to human but decodable by smartphone. Using proactively generated Doppler signals in rough horizontal plane, it can track the relative direction between the smartphone and the acoustic source. Hence, given a set of acoustic sources (more than 5), using the angle differences between relative directions, SITE could compute a set of locations, each corresponding to a subset of sources, whose size should be more than 2. Then, according to a key observation—while the simultaneously estimated locations using different sets of acoustic anchors are within a small circle, the results converge to a point near the true location—SITE proposes a decision scheme that confirms whether the estimated locations meet the accuracy requirement. According to this scheme, for any set of acoustic sources, if it and all of its subsets have a standard deviation below to a pre-defined threshold, then we can regard its corresponding localization result as the user’s location. Otherwise, through taking some images by the phone’s camera, SITE can utilize VSFM (Visual Structure from Motion) technique to achieve a set of relative locations. By exploiting the synergy between the set of relative locations and the set of initial locations computed by relative directions, an optimal transformation relationship is obtained and applied to refine the initial location. The refined result is regarded as the user’s location. By combining the Doppler effect, the new observation, and VSFM technique, SITE can not only achieve the angle-based localization system using low-cost mobile phone, but also guarantee the accuracy and simplify the deployment of anchor nodes.
We implemented a prototype and ran
SITE in real mobile phoneswhich have microphone, a camera, and Yei Technology motion sensors. In the implementation, we utilized the VSFM [
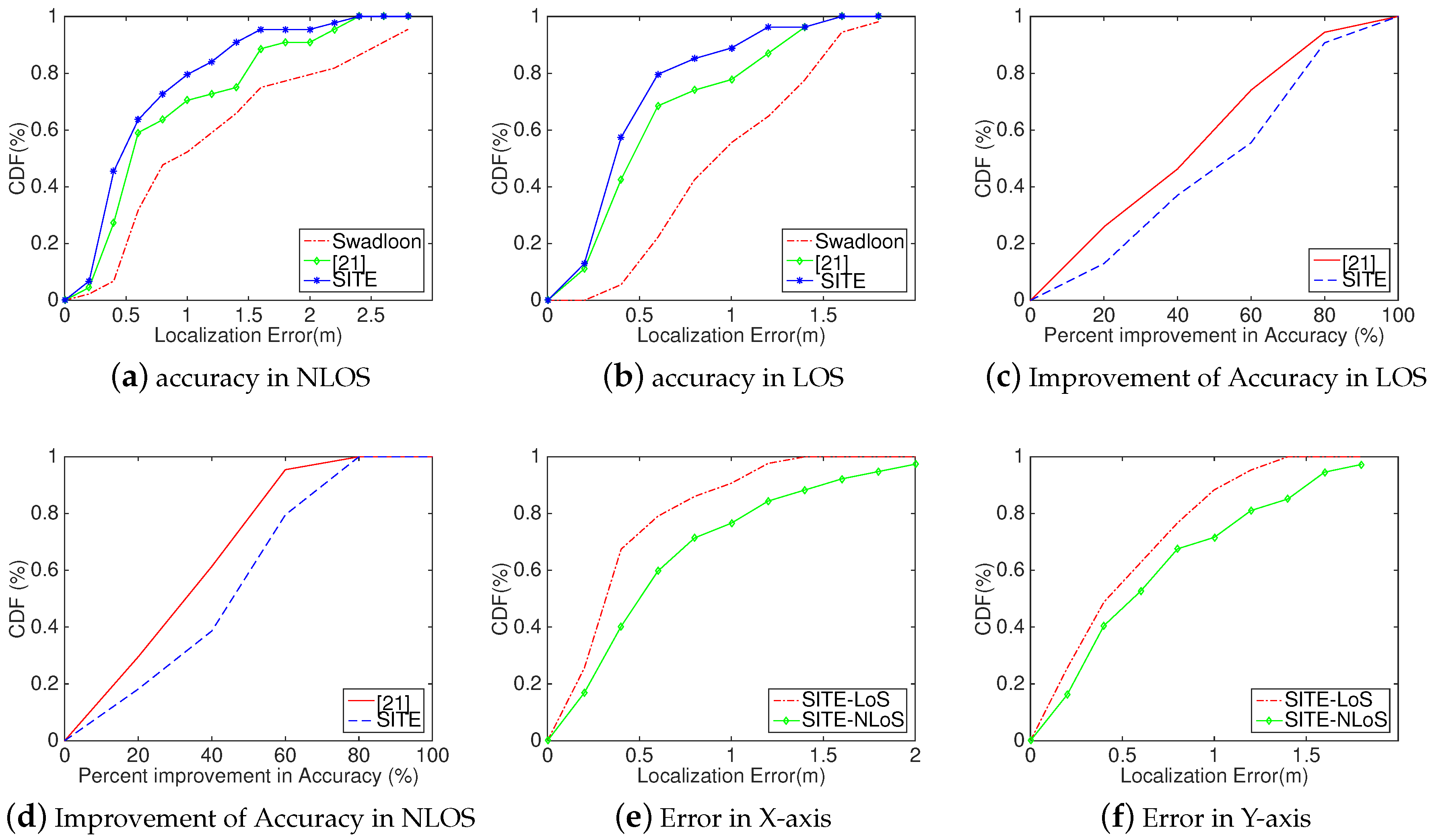
18] toolkit to obtain the camera relative locations. In the evaluation, we deployed two platforms with the same settings in a large building lobby and a large university library. From the experimental results and statistics, we found that
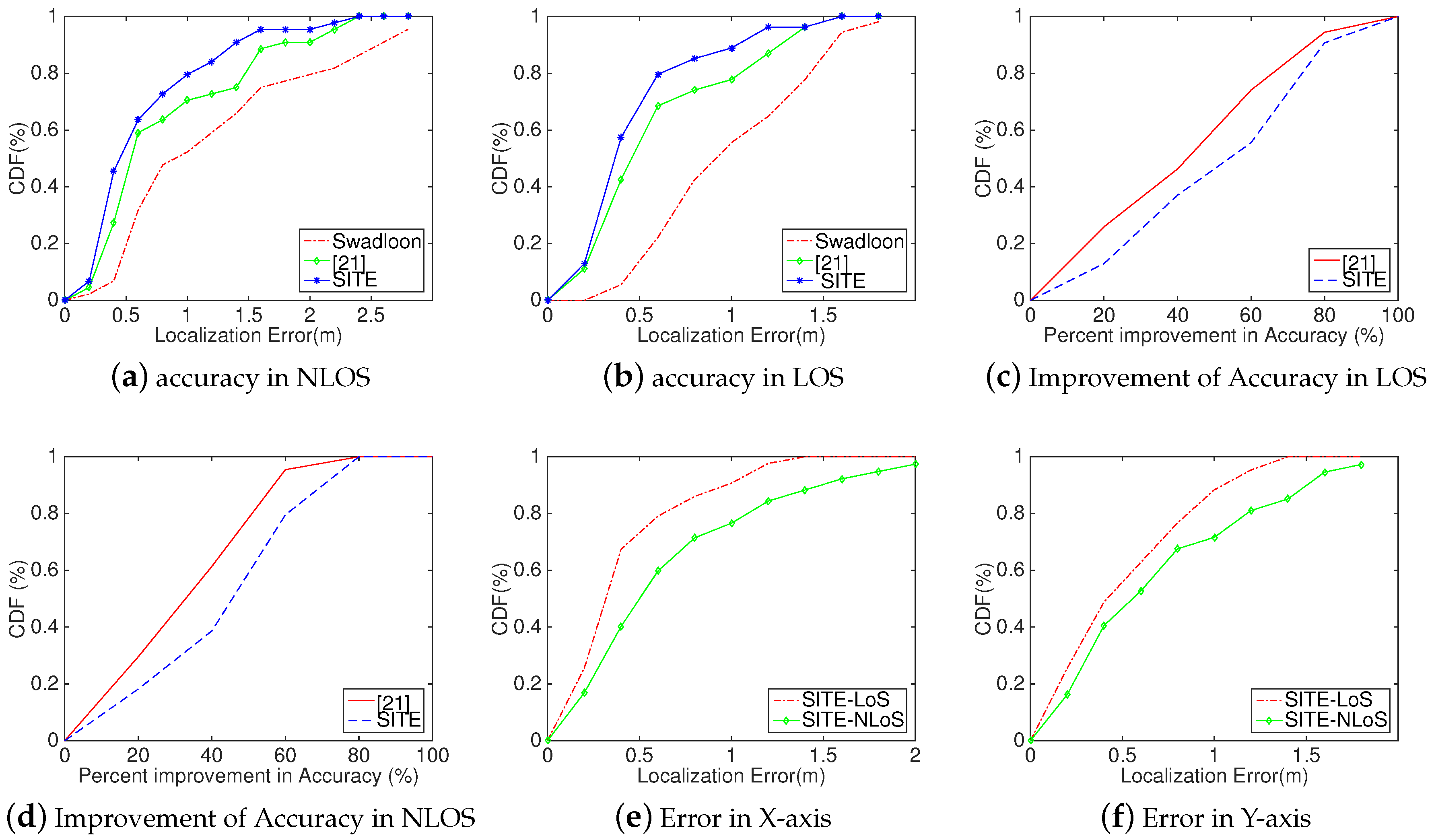
SITE can achieve a median localization error of 0.42 m in Non-line-of-sight (NLOS) condition and 0.39 m in Line-of-sight (LOS) condition. In addition, they also indicate that
SITE achieves a median improvement of localization accuracy of
and
compared to the state-of-the-art Swadloon [
19], respectively. Besides,
SITE has much more robust performance.
The contributions of this work are as follows:
Through exploiting the characteristics of results computed by acoustic-based localization method, we propose a decision scheme to distinguish the deviated results from accurate localization. This mechanism not only increases the chance to tolerate signal instability of individual anchors, but also simplify the deployment of acoustic anchors.
Based on the proposed decision scheme, we present SITE, a ready-to-use indoor localization system that can accurately infer the user’s location. To the best of our knowledge, no similar work has been done to exploit the features of acoustic signal and phone image yet.
We implemented a prototype of SITE running on Android platform by utilizing the VSFM toolkit. Through comparative evaluation, we prove that SITE can achieve accurate and reliable location in many different conditions.
The rest of the paper is organized as follows. In
Section 2, we first give a discussion about the related works. Next, in
Section 3, we introduce some necessary preliminary knowledge, Meanwhile, we also explain and validate our observation. Subsequently, the detailed design of
SITE is separately presented in
Section 4. We describe the experimental settings and make a comparatively analysis of evaluation results in
Section 5.
Section 6 discusses some potential concerns and further works.
Section 7 concludes the work of this paper.
3. Preliminary and Observation
In this section, firstly, we give an introduction to calculate the phone’s relative direction according to the Doppler effect. Then, we present a preliminary experiment, and, based on the results, we give a key observation that the diversity of estimated results indicates its difference between the real physical location. Based on it, a novel localization method combining acoustic signal with image processing is presented in the next section.
3.1. Proactive Acoustic Direction-Finding
Suppose that an acoustic source is emitting sinusoidal signal at frequency
.
is a receiver’s moving velocity, which is positive when the receiver is moving towards the source, otherwise it is negative.
and
denote the moving velocity of acoustic source and the spreading speed of sound in air, respectively. Based on the Doppler effect, the received frequency
is:
If the source keeps still or
, we can obtain the frequency shift
. Meanwhile, assuming that the received signal is
where,
,
, and
, respectively, denote amplitude, phase and noise. Note that the amplitude
changes continuously, and the phase
is affected by Doppler effects. Hence, the observed frequency shift
at time
t can represented as
Then, according to equations mentioned above, using observing the changing of received frequency, we can get the relative velocity
between the phone and acoustic source and and the phone’s relative displacement
Let represent the distance between the phone and acoustic source at time t, so = − . Therefore, to get precise velocity and displacement, we have to track the phase within a tiny error.
Because we are only interested in the 2D direction
rather than the 3D direction
,
is not needed during the direction finding phase; therefore, suppose that the phone moves in a horizontal plane that
is zero, for a given velocity vector of the phone
and
,
where
. According to Equation (
5), we could eliminate the error of
and obtain
and
using linear regression (LR) algorithm. Consequently, the 2D direction
is calculated by
Hence, by proactively tracking Doppler signals, we can compute the real-time relative direction between an individual acoustic source and mobile phone. In
Section 4, we present
SITE that utilizes a set of relative directions between the phone and the pre-deployed acoustic sources to localize the user’s location.
3.2. Observation
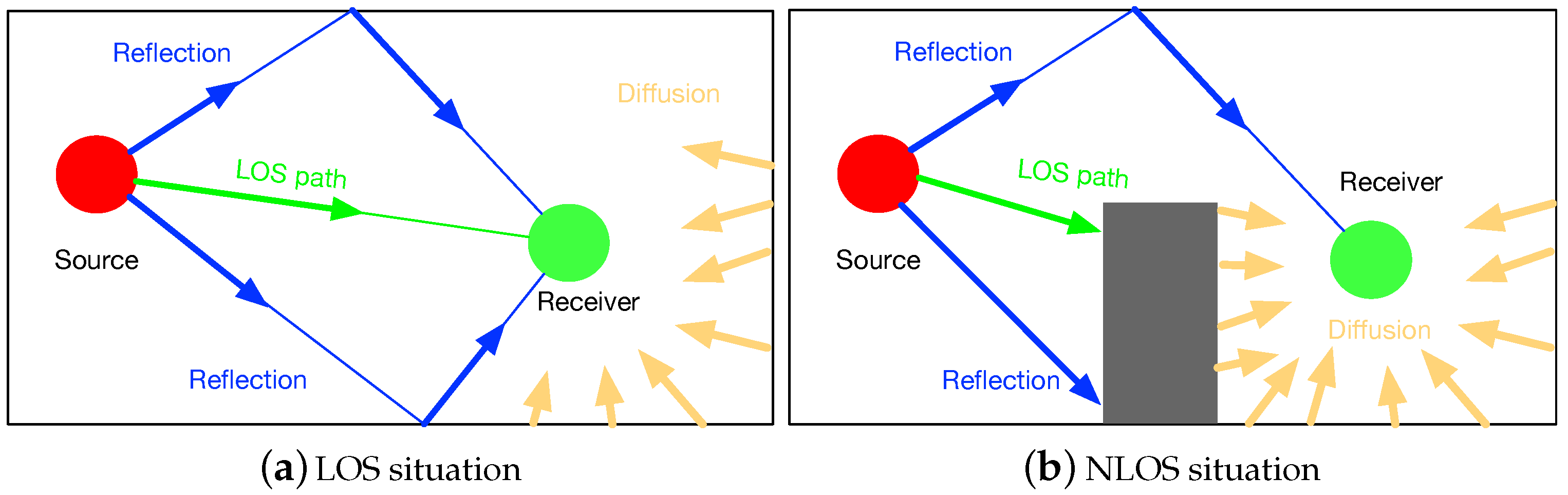
In the indoor environment, many interference factors can influence localization result. These factors include moving people, multi-path interference, background sounds, etc. If calculated result is far away from the real physical location, it is regarded as false. In a practical localization system, it is vital to avoid using false location. However, without the real physical location, judging whether the estimated location is near the real physical location is still an open issue.
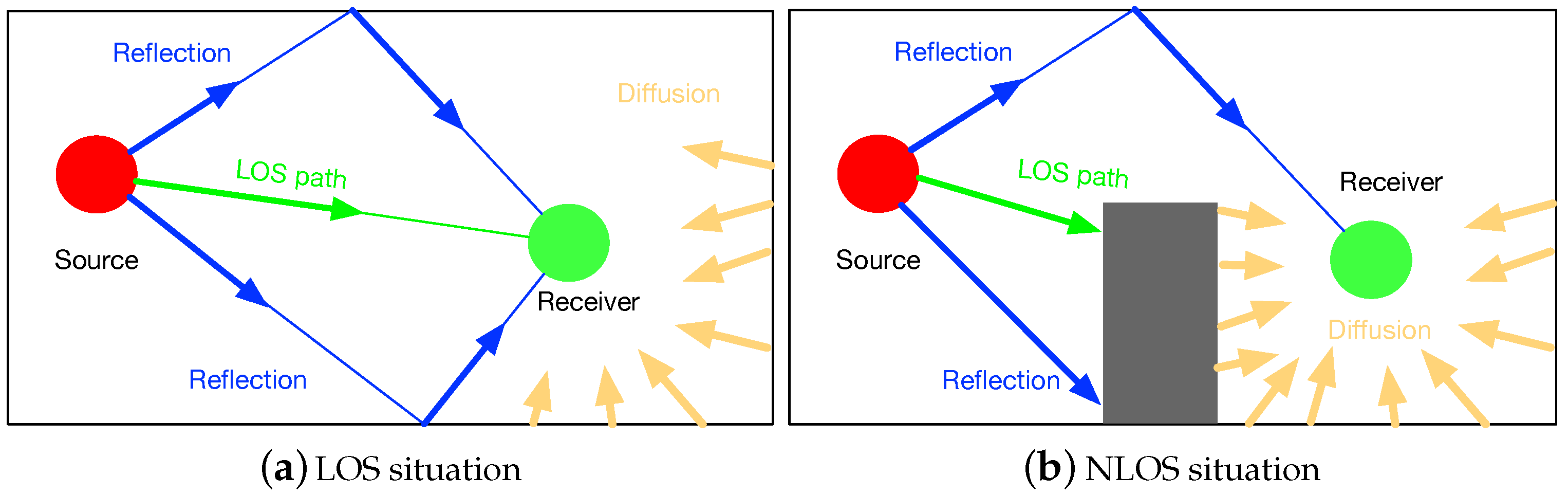
To figure out the relationship between estimated locations and real physical location, we used the prototype of acoustic-based localization method proposed in [
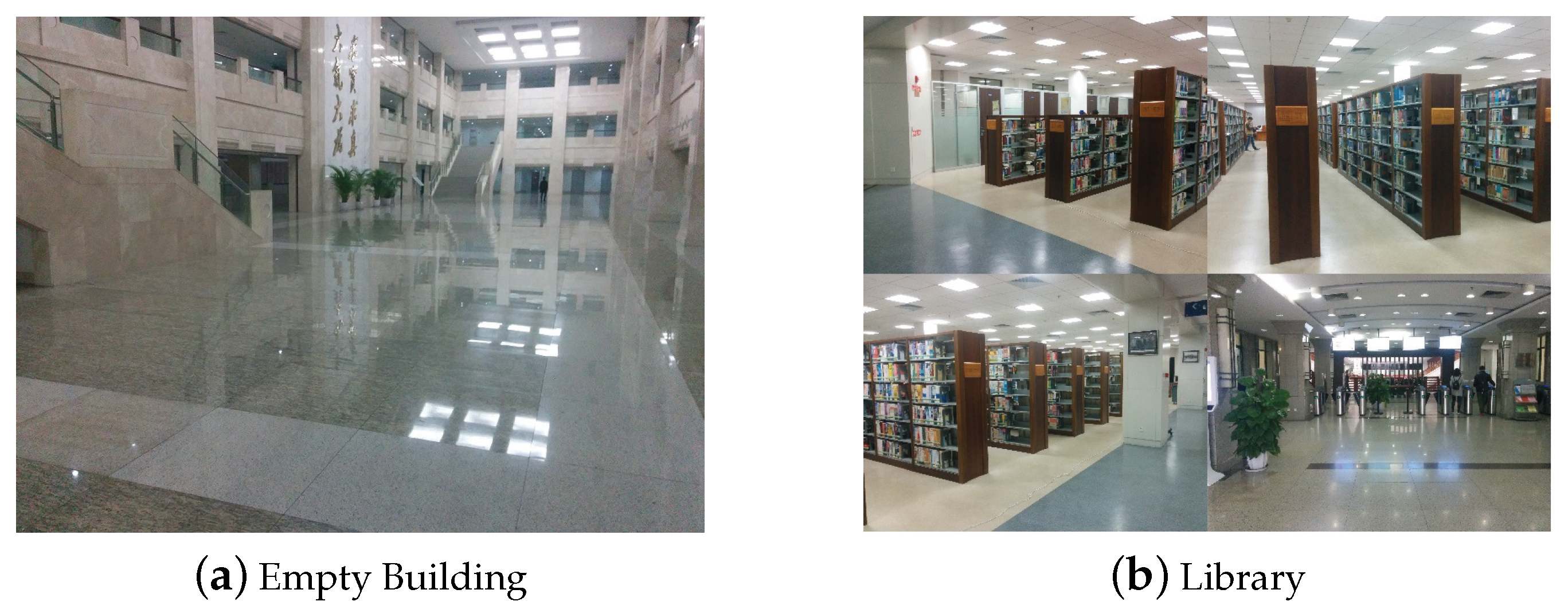
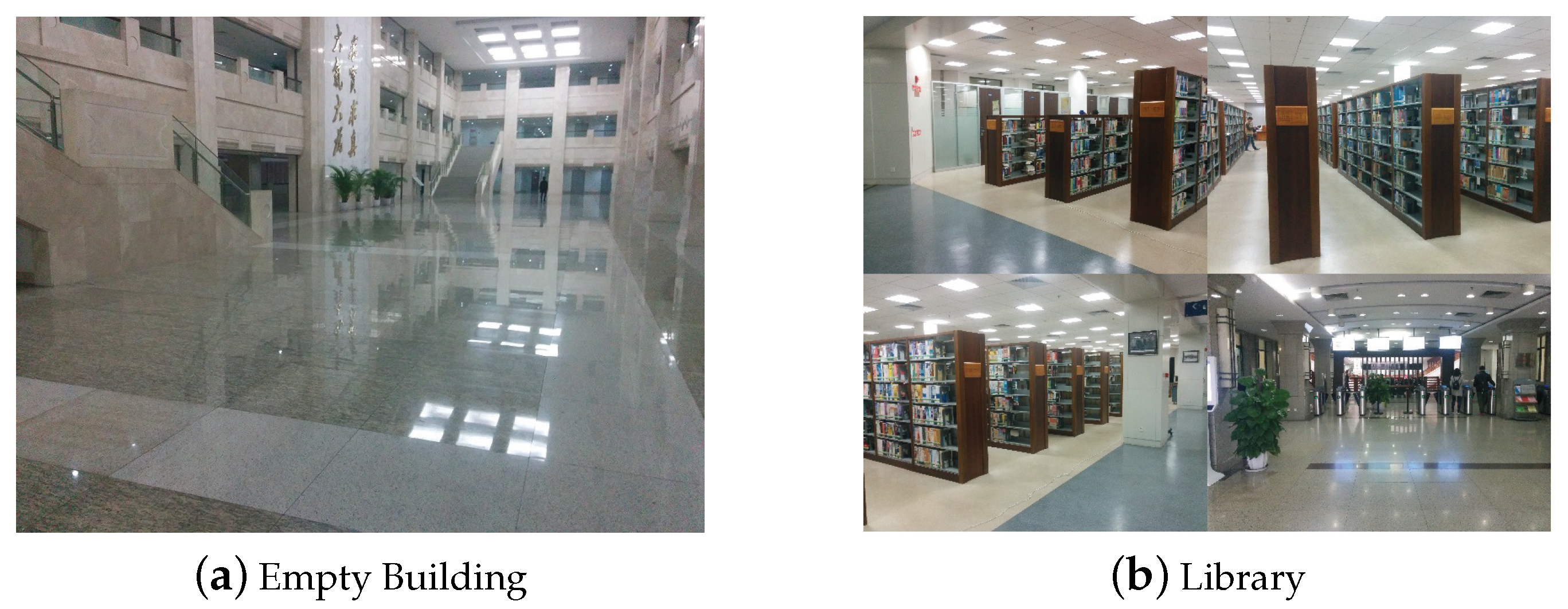
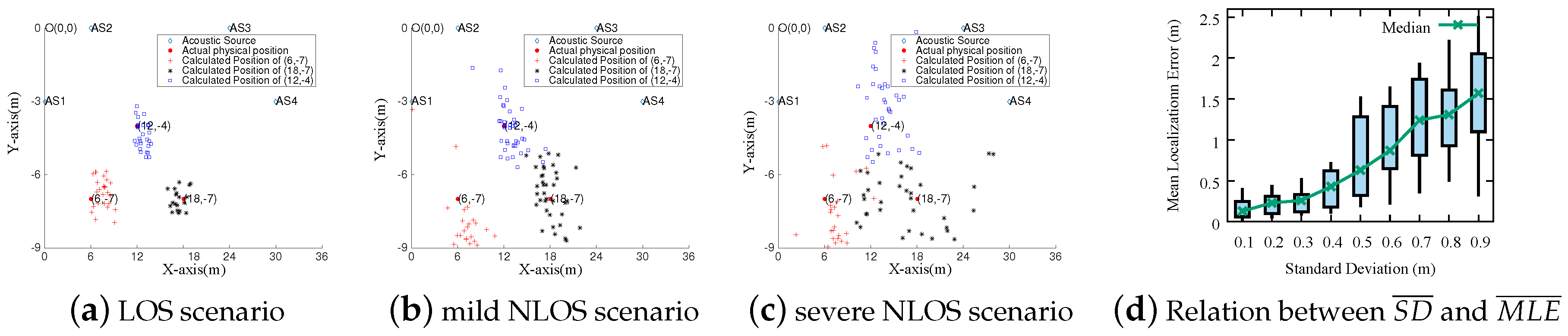
19] to conduct extensive evaluations at three indoor conditions: LOS, mild NLOS and severe NLOS. LOS represents a scenario that no acoustic source is blocked. When fewer than three sources are blocked, we deem this scenario to be mild NLOS. Accordingly, we define severe NLOS situation that has more than three acoustic sources are blocked. Moreover, as shown in
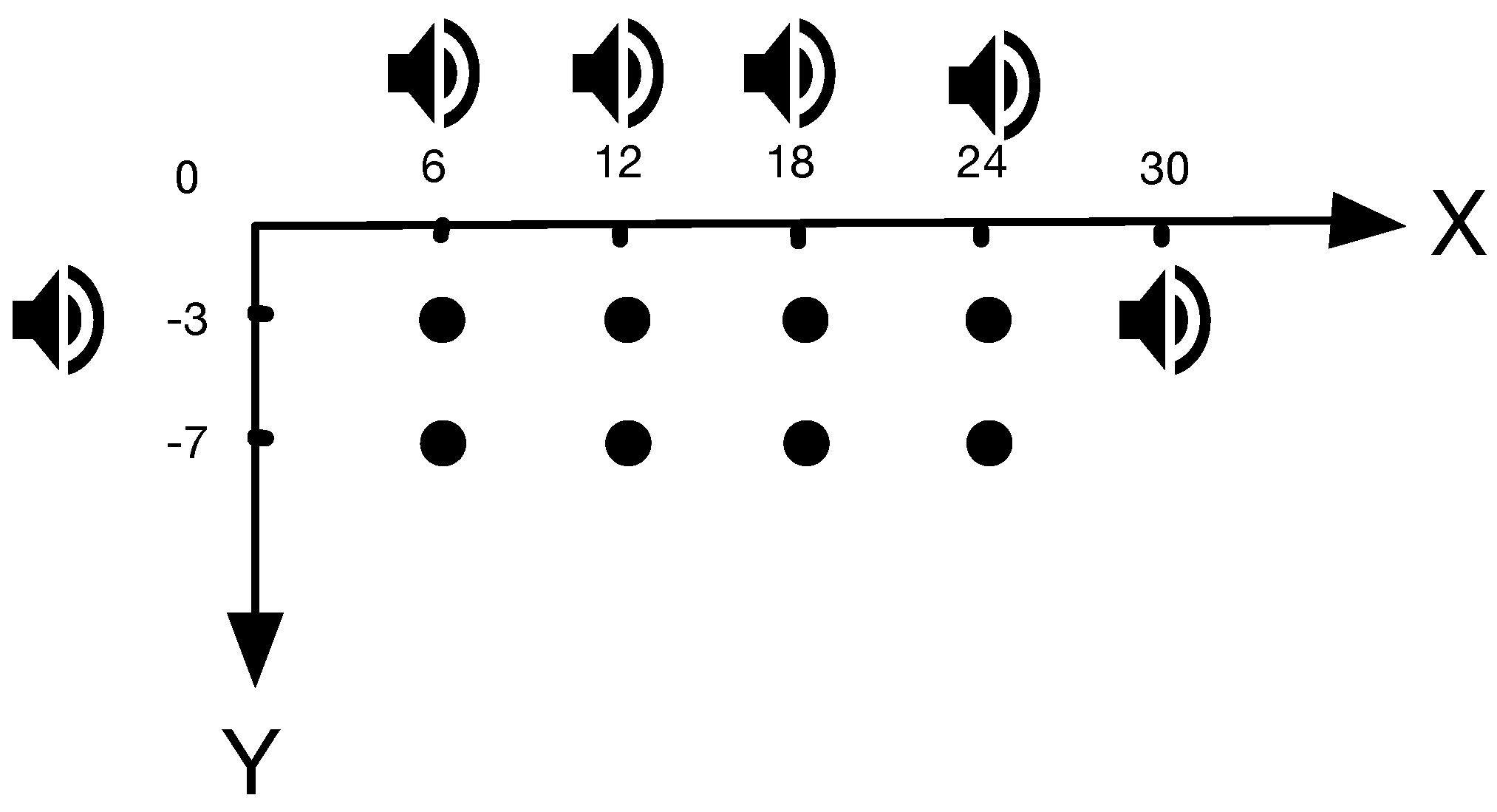
Figure 2, our evaluations were conducted in two indoor circumstances: building lobby and library. We repeat the localization process at three fixed points under different levels of noise interference. The setting of acoustic anchors and the located points are illustrated in
Figure 3. We pre-deployed four acoustic sources at (0,−3), (6,0), (24,0), and (30,−3), which are marked as diamonds in the figure. The coordinates of located locations at (6,−7), (18,−7) and (12,−4) are marked as red solid circles.
As
Figure 3 illustrates, we can intuitively observe that there is a tremendous difference in accuracy between different indoor scenarios. Furthermore, these results reveal an interesting phenomenon: With the good condition of an indoor environment (see
Figure 3a), the estimated locations are densely scattered over a relatively small area near the real physical location. On the contrary, with bad conditions (see
Figure 3b,c), the estimated locations are scattered over a larger area and some estimated locations may be far from real physical location. Based on this observation, we assume that, if the simultaneously computed locations for the same physical location by using different acoustic sources change little, the localization result is very close to the real physical location. Otherwise, it probably deviates from the real physics location. We prove the assumption by conducting extensive experiments as presented in the following.
Assuming
M coordinates {(
), (
), ⋯, (
)} correspond to the same point (
); then, we can compute their standard deviation (
) according to Equation (
6).
where we define
as the mean coordinate of all the computed candidate coordinates. In addition, we further compute the mean localization error (
) as Equation (
7).
According to our assumption,
will be positively correlated with
. As the standard deviation increases, the average localization error gets larger correspondingly. For each experiment mentioned-above, we repeat 10 times at the different time of a day. For each experiment, we plot the pair of
and
in
Figure 3d. As demonstrated,
is positively related to
:
increases with rising
. For each
, we compute the distribution of
and plot the maximum value, 3rd quartile, median value, 1st quartile and the minimum value of
s. As shown by the figure, the larger the
is, the larger range the
s are distributed in. Note that the diversity of localization results directly affect both
and
. For a given set of locating results, by restricting the value of
, e.g., smaller than 0.3, if there exists a subset of results satisfying the restriction, the corresponding
will probably be very small, which indicates the subset of locations closely match the physical location. This phenomenon is confirmed in
Figure 3d and it is consistent with our expectation.
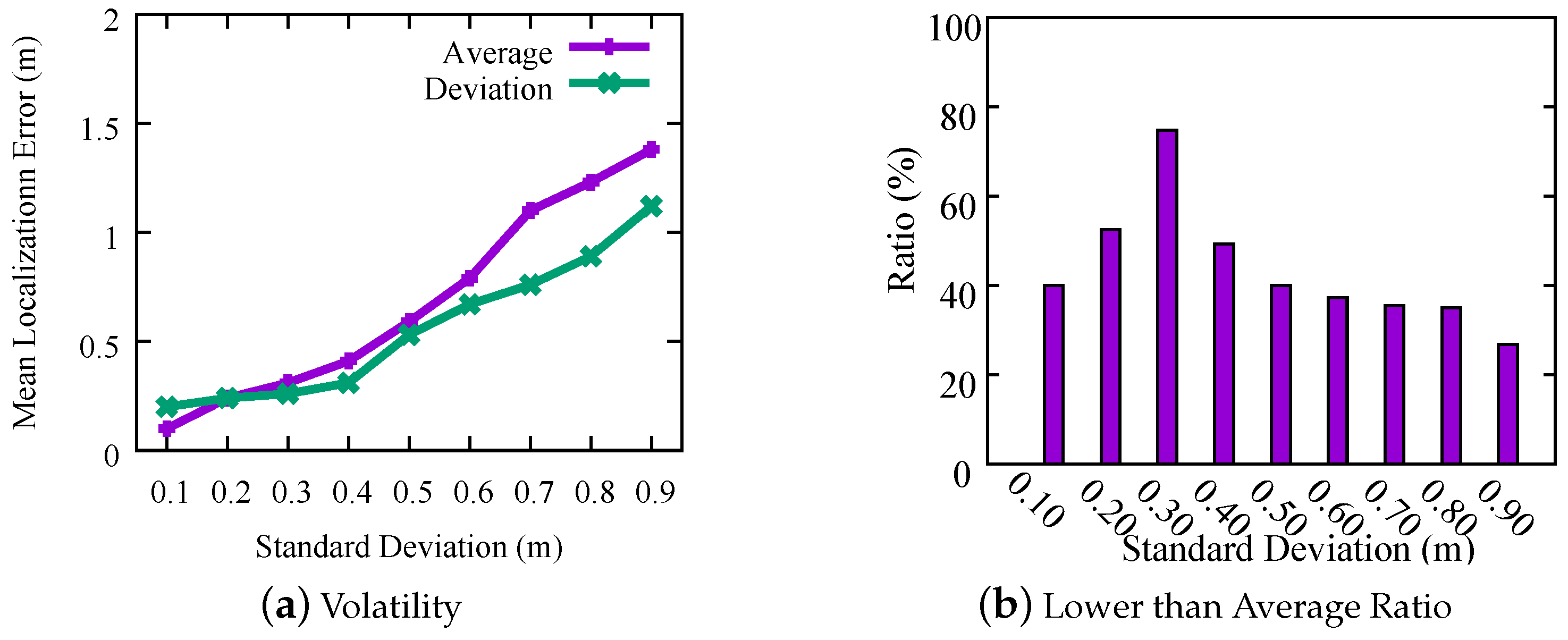
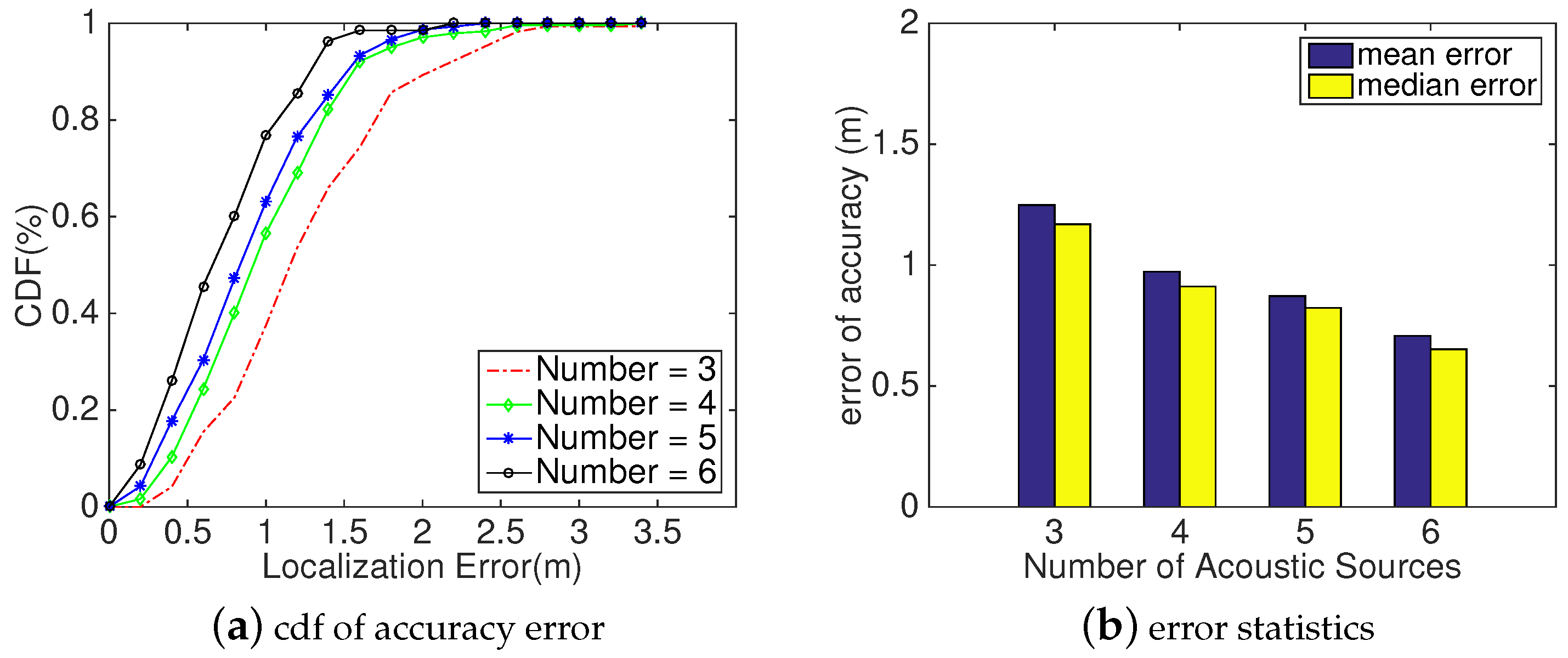
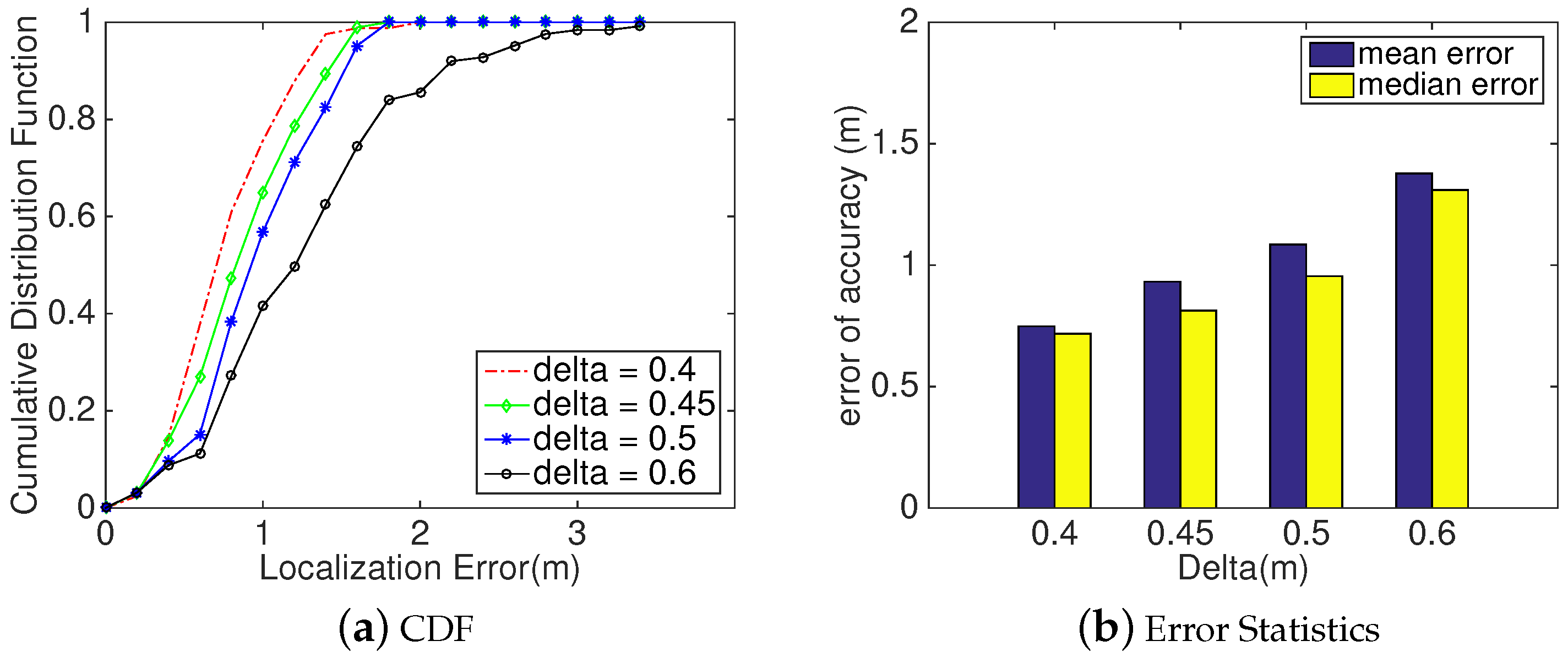
Moreover, for each
, we also compute the averaged
and the volatility of localization results by
and
of
. The averaged
denotes the overall location accurate when all estimated results satisfy the given restriction of
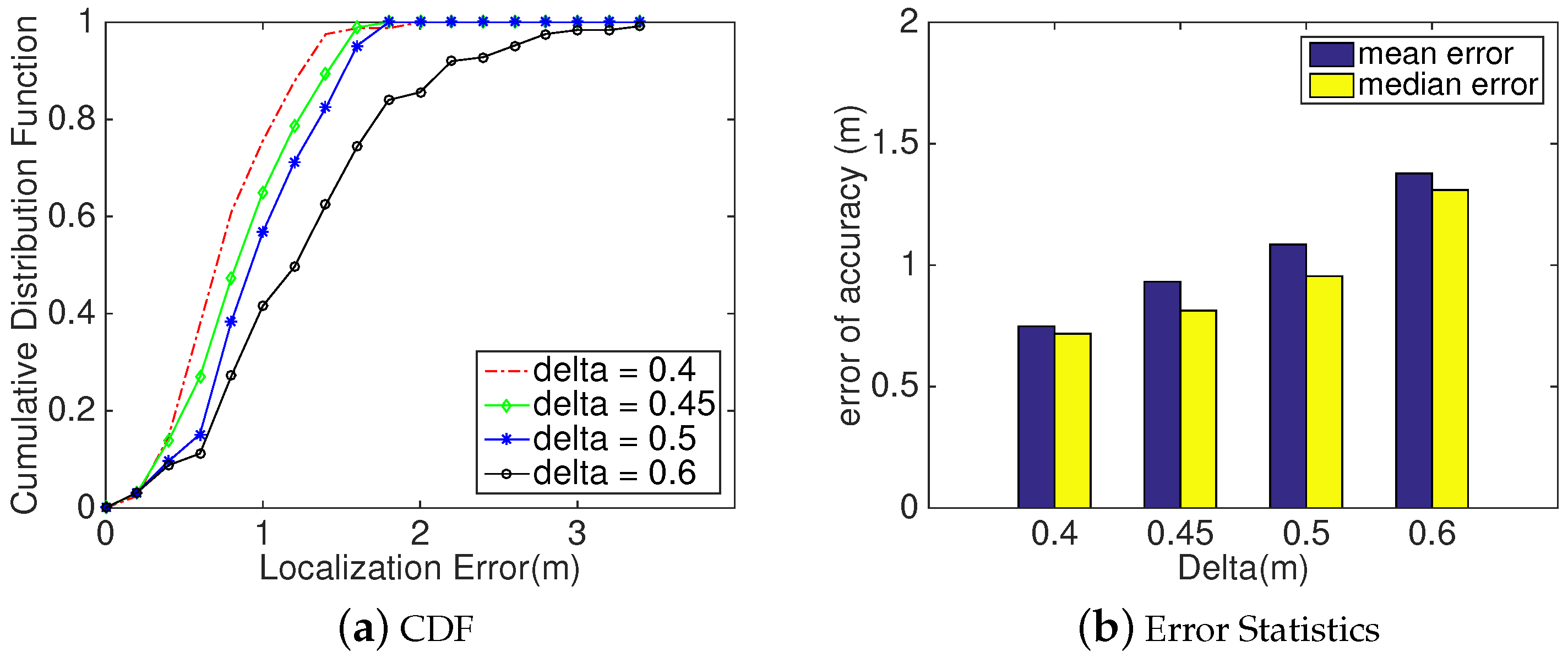
, and the deviation denotes the volatility of all localization results. As shown by
Figure 4a, the averaged
increases with the rising of
, and the volatility of
first steadily increases when
increases from 0.1 m to 0.3 m, and then significantly increases from 0.2 m to 1 m when
increases from 0.3 m to 0.9 m. In addition, for a given
, we further compute the probability that the actual
of each calculated result is less than the given
, and plot the distribution in
Figure 4b. As shown by it, when
is 0.3m, the actual
s of about 80% results are less than 0.3 m. The probability of
0.3 m is significantly higher than other cases. Based on these results, in the
Decision Scheme (see
Section 4.3), we set the threshold
to 0.3.
With all observations mentioned above, we design a smartphone-based indoor localization system, SITE, that can judge the usability of the estimated location and refine it when it is unusable. The next section introduces the details of our proposed design.
4. Design of SITE
In this section, we give the detailed design of
SITE. We first introduce the overview of
SITE in
Section 4.1. On the basis of acoustic Doppler effect, we use acoustic anchors to compute the physical location of a mobile phone in
Section 4.2. According to a set of computation results, SITE determines whether the estimated location can represent the real physical location in
Section 4.3. If not,
SITE uses VSFM technique to refine the estimated result in
Section 4.4.
4.1. Overview of SITE
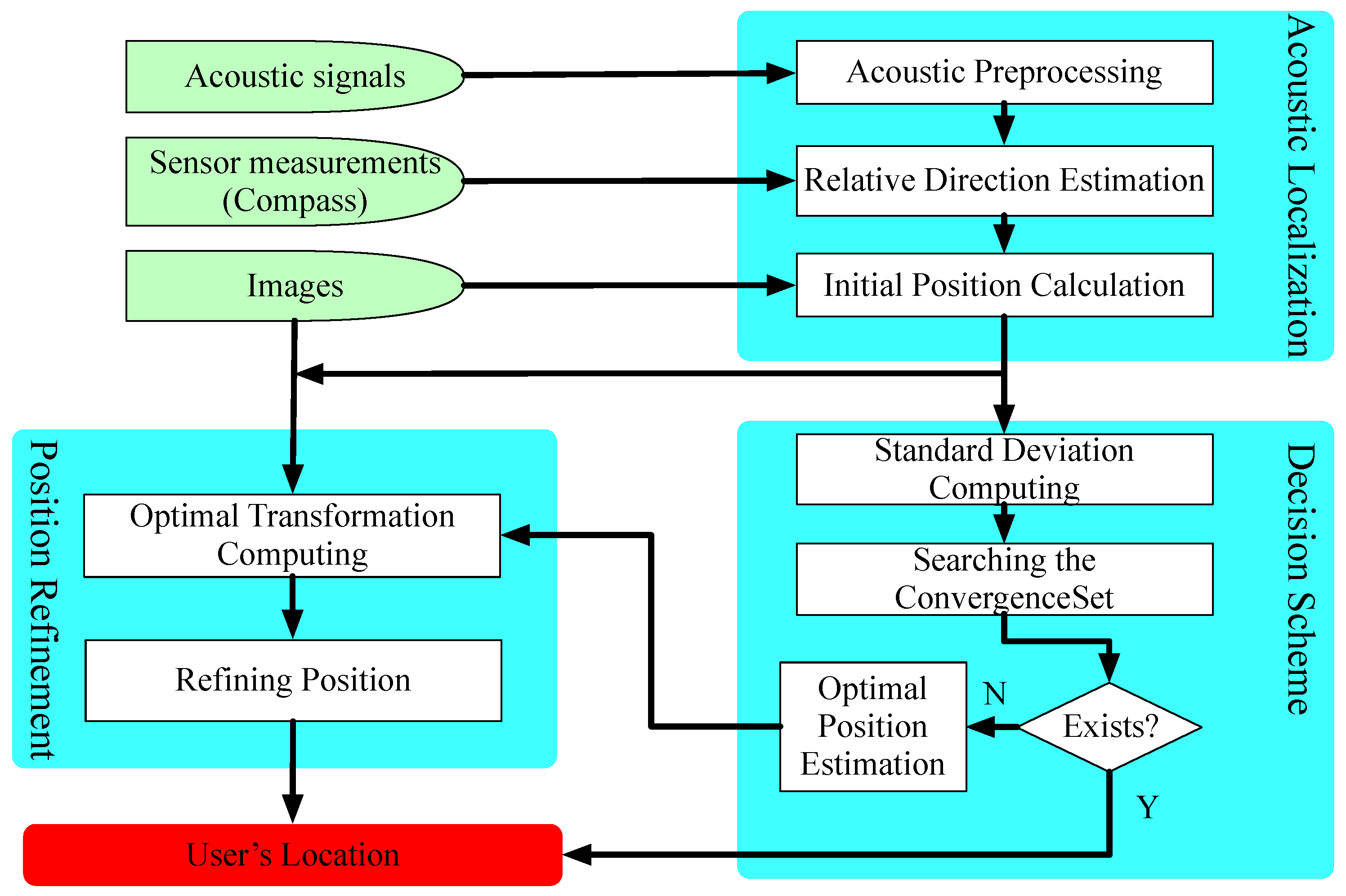
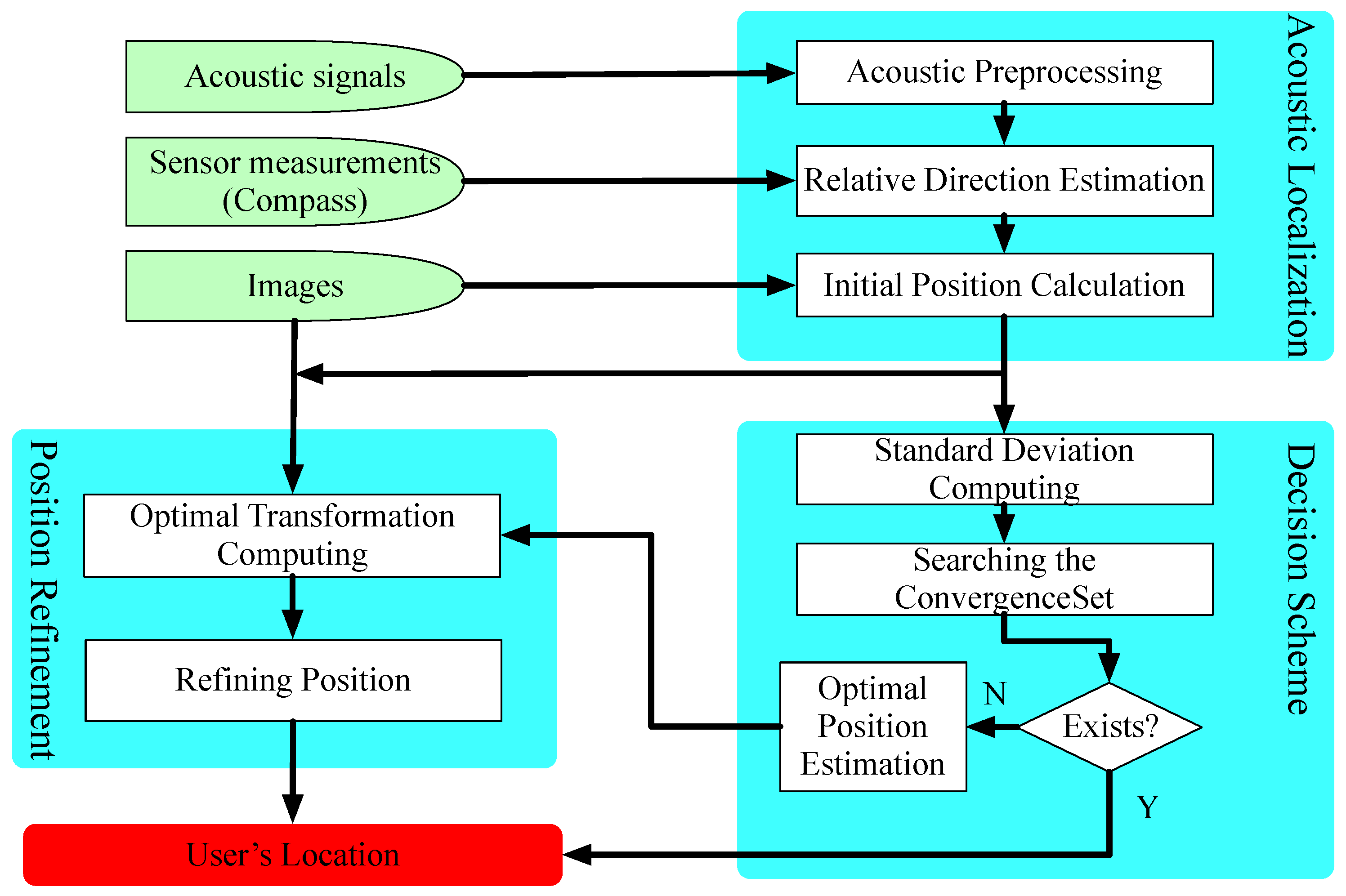
As shown in
Figure 5,
SITE contains three main components:
Acoustic Localization is a module that can localize user (mobile phone) using relative directions between the phone and acoustic sources according to acoustic Doppler effect. This model consists of three sub-modules:
Acoustic Preprocessing,
Relative Direction Estimation and
Initial Position Calculation. Given acoustic signals,
Acoustic Preprocessing first eliminates the interference and adjusts the amplitude. Then,
Relative Direction Estimation estimates relative direction between device and each acoustic anchor based on the theory of Doppler effect. With directions relative to a set of anchors,
Initial Position Calculation computes a set of initial locations, each corresponding to a different set of relative directions, to find the optimal. In
Section 4.2, we give a detailed introduction of this module.
Decision Scheme is a module that assesses the accuracy of localization result. It consists of sub-module
Judgement Condition and
Finding the Optimal Coordinate. In sub-module
Judgement Condition,
SITE judges the state (
CONVERGED or
DIVERGED, see
Section 4.3.1) of a set of initial locations calculated by
Acoustic Localization according to our observation introduced in
Section 3.2. Then, if the state is
CONVERGED, sub-module
Finding the Optimal Coordinate is activated to search for an optimal coordinate for the device. We give detailed design of this module in
Section 4.3.
Position Refinement is a module that can refine the localization result with images by VSFM technique. We introduce it in
Section 4.4.
With a pre-deployed platform of acoustic sources that emit the sinusoid signals at a different specific frequency, module
Acoustic Localization first eliminates interference signals and adjusts amplitudes of received signals through acoustic preprocessing technology. Then, it estimates the phone’s direction relative to an individual acoustic source via the above-mentioned method. The initial location is a set of relative directions and a set of acoustic sources with known coordinate. Note that
Acoustic Localization could simultaneously obtain a set of locations, each corresponding to a different set of acoustic sources. According to our observation and proposed principle mentioned in
Section 3.2, the sub-module
Decision Scheme computes the
of these calculated locations. Subsequently, it judges whether the phone has been accurately localized by comparing the Standard Deviation with a pre-measured threshold in
Section 3.2. If so, the user’s location can be achieved by
Initial Position Calculation. Otherwise, the module
Location Refinement is activated to refine the computed uncertain location through VSFM technique. In the following sections, we give a detailed introduction of these modules.
4.2. Acoustic Localization
Here, we introduce how to compute the initial location by finding the acoustic source’s direction relative to smartphone. As illustrated in
Figure 5, it consists of three procedures:
Acoustic Preprocessing,
Relative Direction Estimation and
Initial Position Calculation. In our implementation, we make a brief reference to the work in [
19] to estimate the relative direction. Next, we simply introduce its procedures in
Acoustic Preprocessing and
Relative Direction Estimation. Besides, we describe the principle and procedure of calculating the initial location with these relative directions.
4.2.1. Acoustic Preprocessing
In acoustic-based localization system, interference includes other acoustic waves that generated by other mobile phones or other acoustic sources. We denote external interference as
in Equation (
2). To eliminate these interferences, we first pass the received signals
through a Band Pass Filter (BPF) that only the signal at a specific frequency will pass. Consequently, signals from other sources and low frequency noises are eliminated. Hence, the acoustic signals can be represented using Equation (
8):
In addition, to avoid resulting in distortion of the different frequency component, we choose the equiripple FIR filter as our ideal BPF in the prototype of SITE.
Subsequently, we adjust the filtered acoustic signals by Automatic Gain Control (AGC) that results in modify the the amplitude to (almost) a constant. Eventually, we get the acoustic signals . Next, we describe how to precisely track the phase by using PLL for estimating direction.
4.2.2. Relative Direction Estimation
As mentioned in
Section 3.1, we can estimate the relative direction between a device and an acoustic anchor by using LR algorithm to solve Equation (
5). To do that, we should get the precise velocity and displacement in advance. Hence, we first utilize Phase Locked Loops (PLL) to track the changing of phase
while the device is moving. Then, we can get the precise displacement
and velocity
as shown in Equation (
4). On that basis, we compute a 2D relative direction vector using a linear regression, and eventually compute the relative direction
in WCS (World’s Coordinate System), which can be acquired by compass.
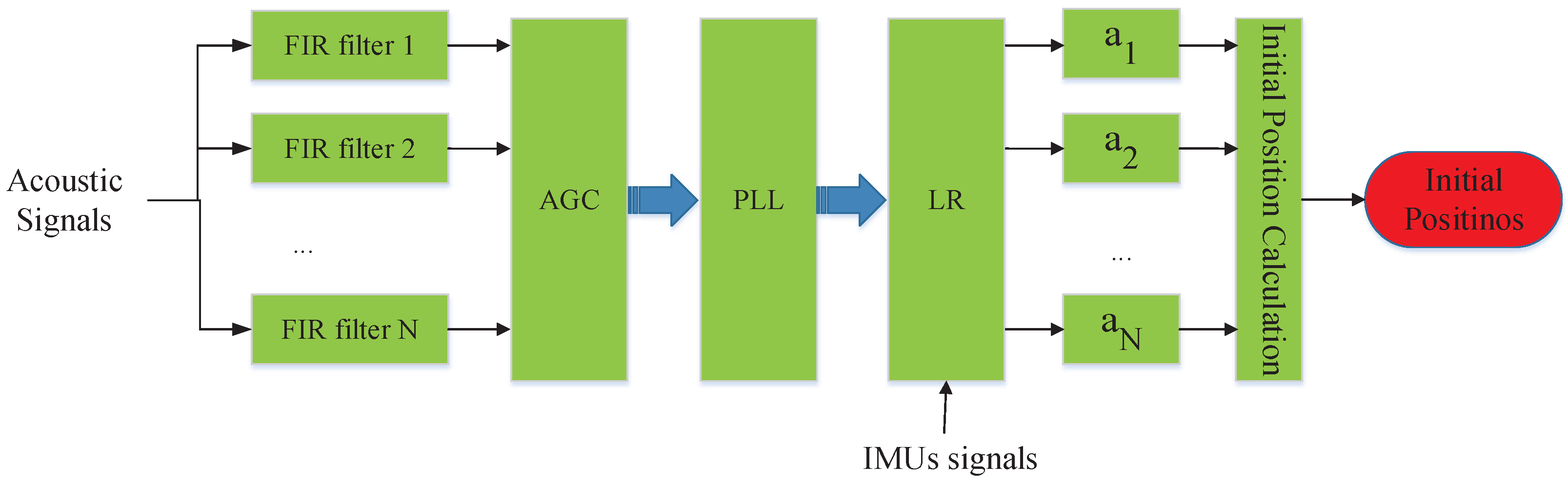
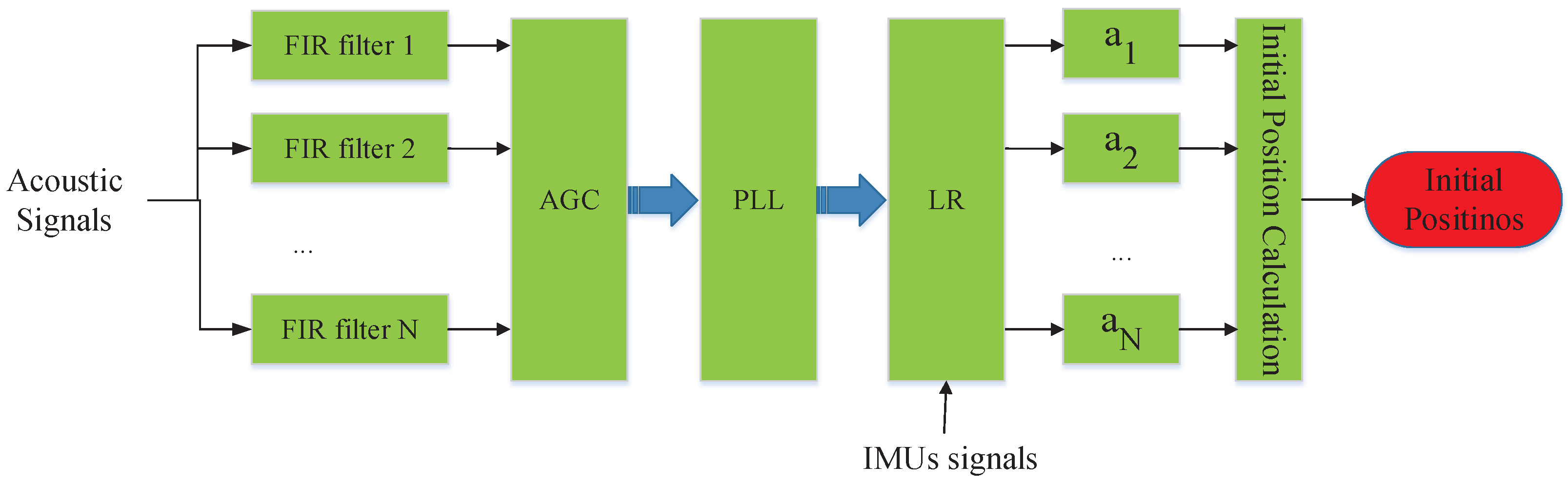
Although we can estimate the relative direction between a device and an acoustic anchor, SITE needs to further calculate a set of relative directions using at least three acoustic sources to localize user. In a localization system, several acoustic anchors are pre-deployed. Hence, SITE needs to compute the relative directions between multiple nearby acoustic sources to the device simultaneously. As shown in
Figure 6, the received acoustic signals parallel walk through many FIR filters (
FIR filter 1,
FIR filter 2, ⋯, and
FIR filter N), each with different frequency bandwidth thresholds. The threshold value is set according to the frequency of pre-defined acoustic sources. Then, through sequentially processing by AGC, PLL and LR, the filtered signals by different FIR filter will generate a set of relative directions (
). Eventually, with these relative directions,
SITE can compute location using the difference of relative directions, we will give an introduction in the following section.
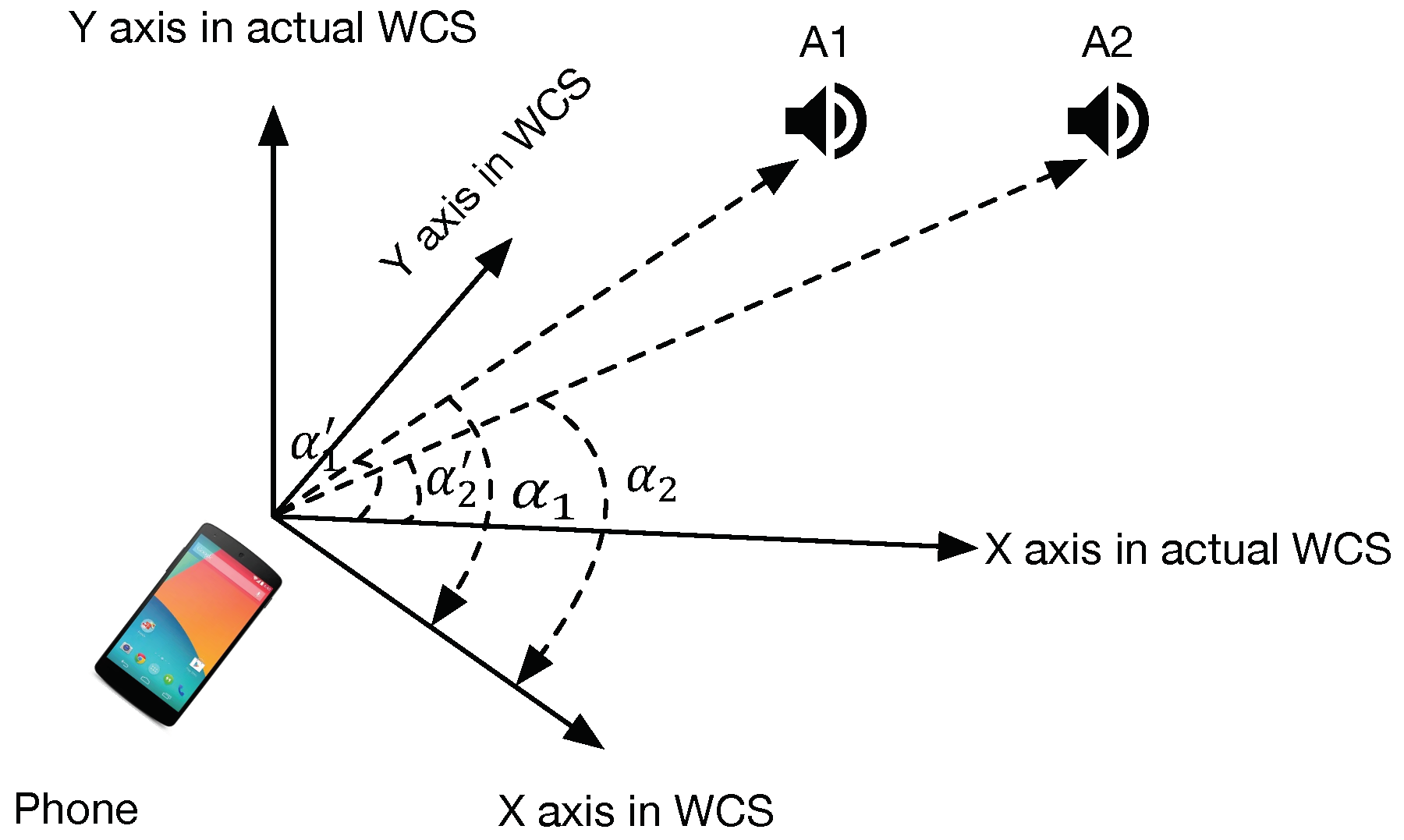
4.2.3. Initial Position Calculation
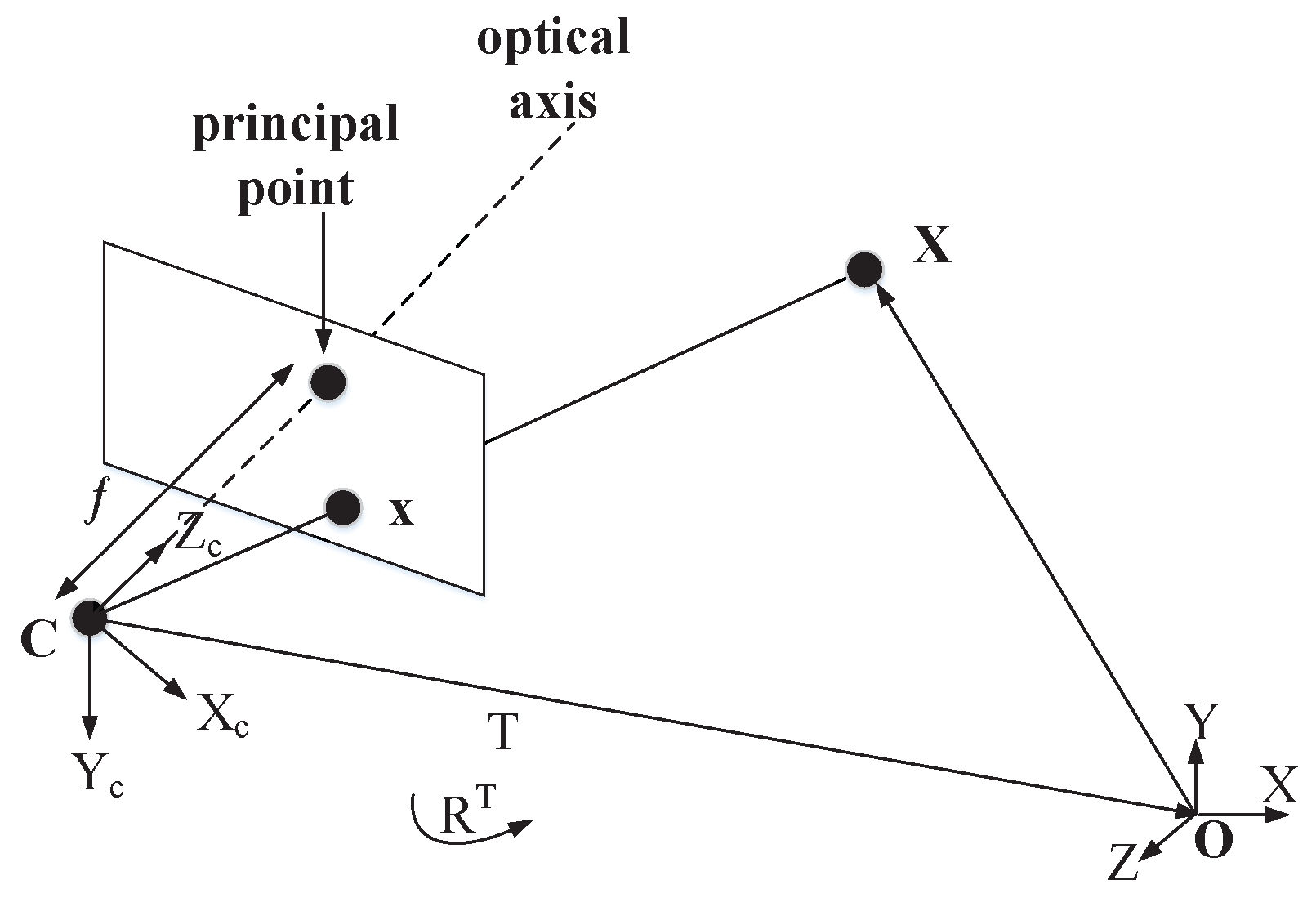
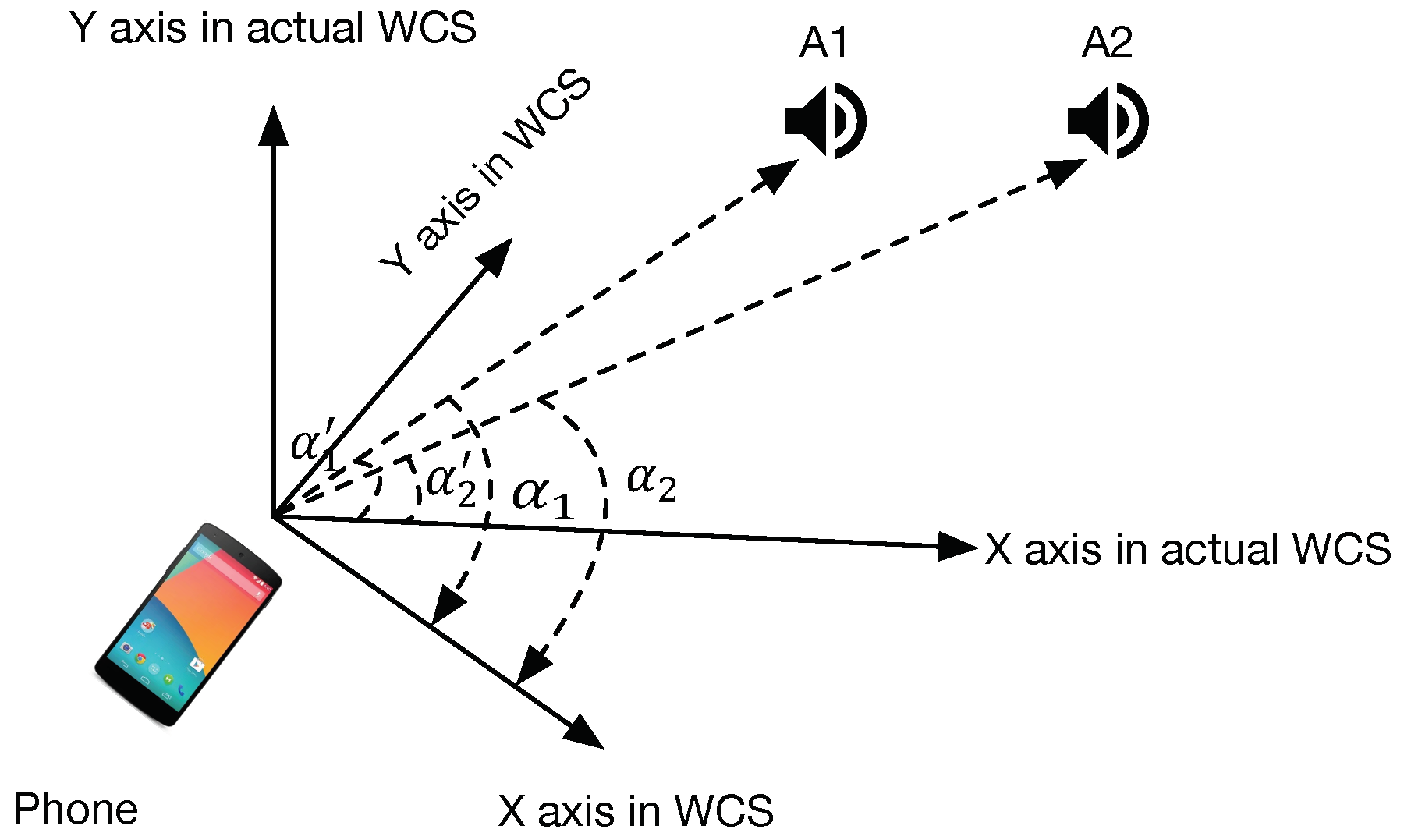
As mentioned above, the phone calculates the direction of each anchor node in WCS for calculating the location. However, the WCS is acquired by the compass, due to the error of compass;
Figure 7 shows that the X axis in WCS may not point to the X axis in the actual WCS. Thus, the calculated relative direction
and
may not be the actual direction relative
and
. In the figure, we can see that the difference
, also named as the opening angle, is fixed that equals to
. Its accuracy is not be affected by the interference from the compass. Hence, to remove the cumulative errors of the compass,
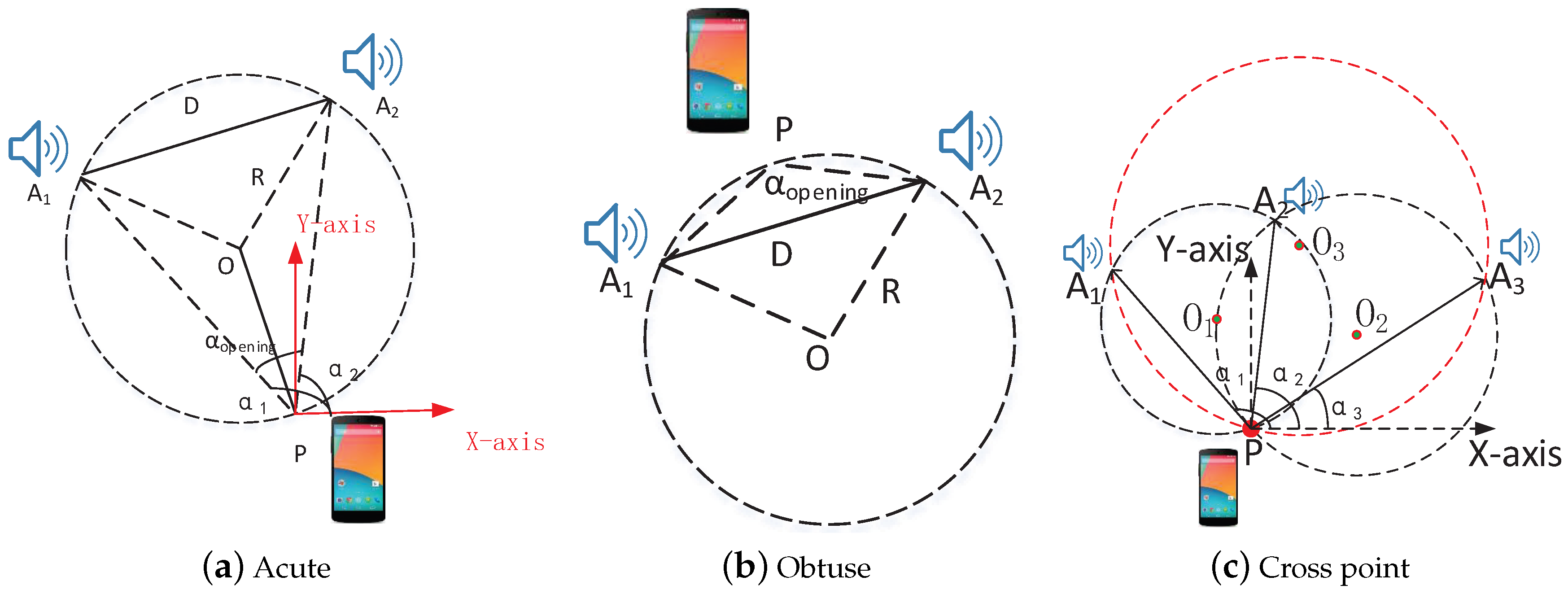
SITE utilize the opening angle to estimate initial coordinates/locations.
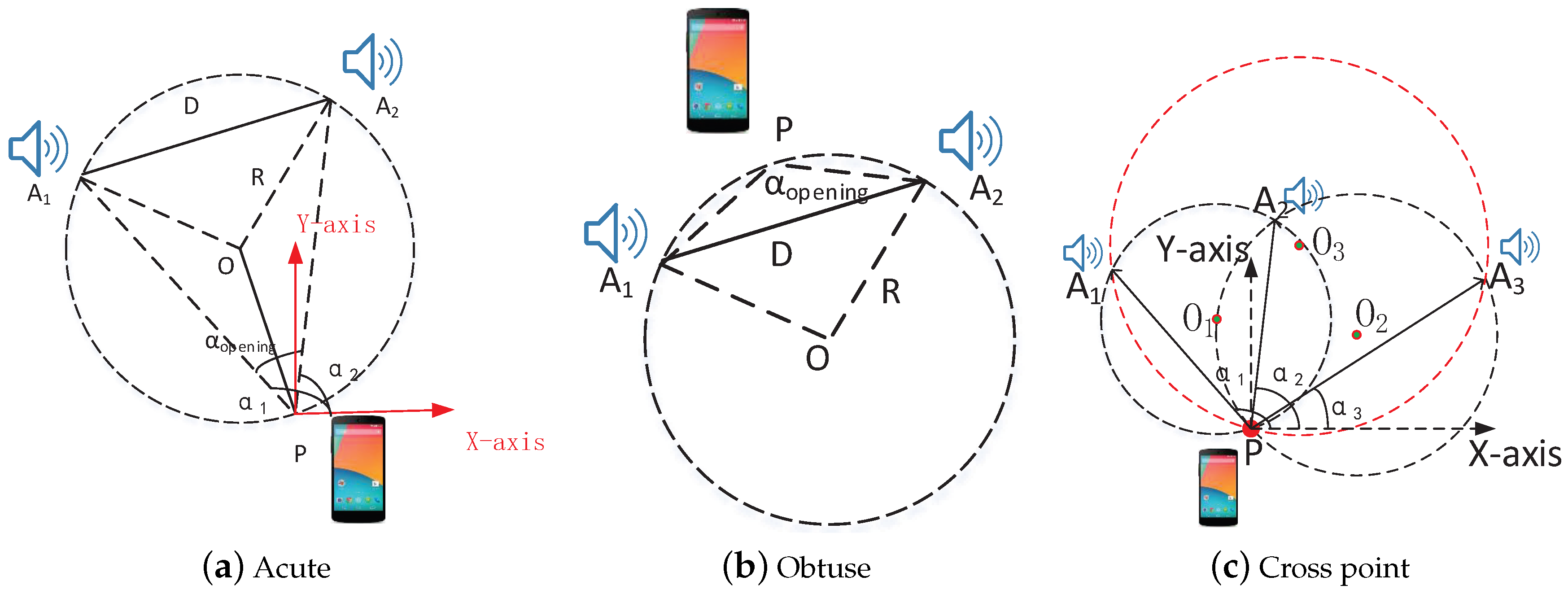
In
Figure 8a, there are two acoustic sources,
and
, and their corresponding directions relative to mobile phone
P (with unknown coordinate
) are
and
. By computing the distance
and the opening angle
, we can infer that
P locates on a fixed circle, whose radius (
R) can be calculated with the distance
D and the opening angle
. Then, as
and
are known, we get two possible results for circumcenter
O. If
is an acute angle, the circumcenter
O and
P are on the same side of
as shown in
Figure 8a. Otherwise, they are on the opposite side, as shown in
Figure 8b.
However, as
Figure 8c illustrates, while there are three acoustic sources (
,
, and
) and the corresponding relative directions are
,
, and
, we get two cases of phone’s location using above method. One is that the calculated location lies on the crossing of three circumcircles (
,
and
) as shown in
Figure 8c. Thus, we refer to the crossing point as an initial location. Another is with many alternative points once that three circumcircles do not locate at one point. Therefore, we have to choose the optimal as an initial location. In addition, if the number of acoustic sources is more than 3, we can also compute the coordinate in a similar way.
As described above, if there are
N pre-deployed acoustic sources, there will be at most
circumcircles and
possible coordinates. Then, we have to find the optimal coordinate from these alternative coordinates. However, the optimal coordinate should have a minimum distance to all the circumcircles, each corresponding to two selected acoustic sources and the mobile phone, as shown in
Figure 8c. To search the optimal, we compute a accumulative distance
(
=
), where
represents the distance to an individual circumcircles’s arc. Then, the distance relative to a calculated location (with coordinate
) can be calculated as follows,
Here, () and represent the centre coordinate and radius of a given circumcircle, respectively. Eventually, the coordinate corresponding to minimum is selected as the initial location.
By analyzing the calculation method, if taking all acoustic sources for calculating initial location, it is still evident that the computation workload is a very big burden for smartphone’s limited battery capacity, even though its computational capability has been greatly improved. Moreover, if all signals are used to compute location, it will bring in much more error that is likely to obtain a
NULL by the module
Decision Scheme, which is explained in
Section 4.3. Then, the module
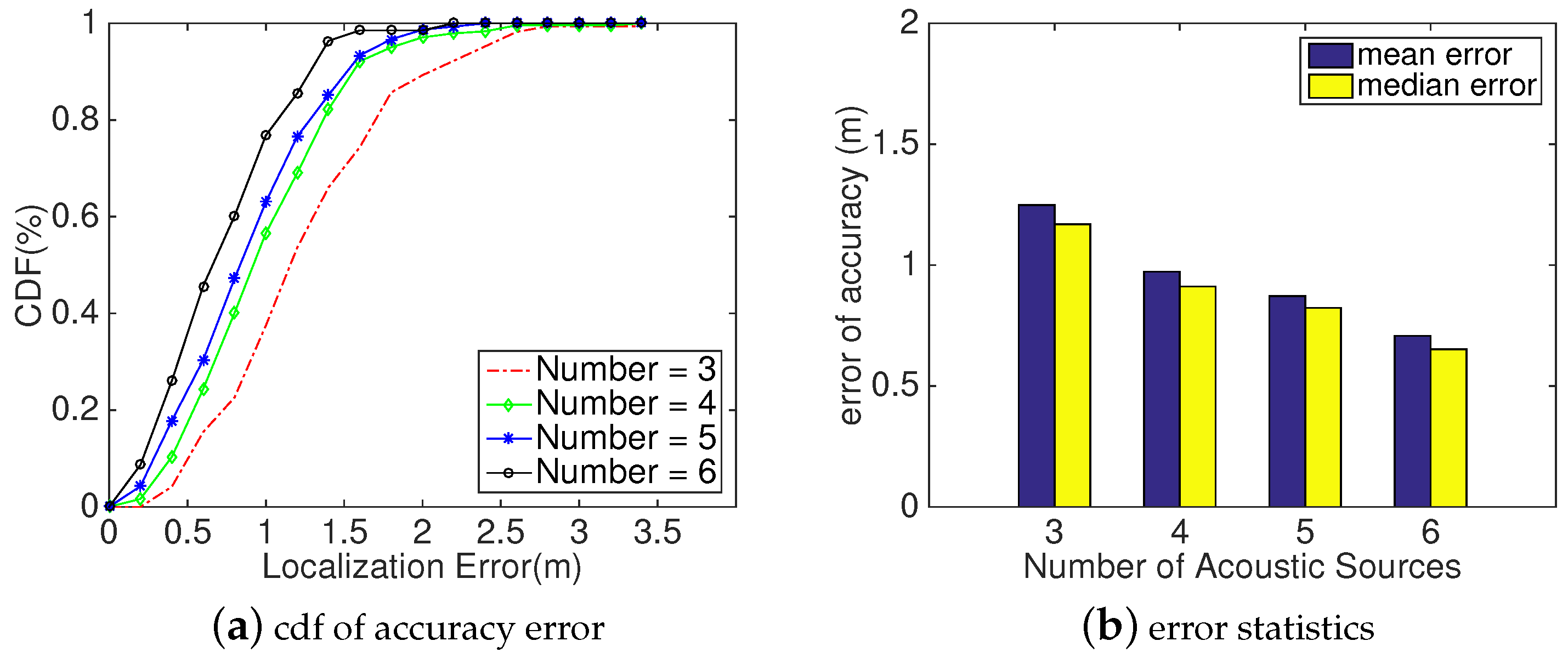
Location Refinement is activated, incurring much additional computation costs. Therefore, a measurement should be taken to avoid incurring a huge computation burden as well as possible. Assuming
SITE has
N anchor nodes, we select
anchors with the strongest signal. Then, there is
initial locations for the user. On a condition that the captured anchor nodes are less than
M caused by signal attenuation, e.g., interference signals,
SITE will adopt all of them to calculate initial location. Note that, if the number is fewer than 3,
SITE fails to location the phone. Hence, for balancing the computational workload and localization accuracy, we set
M as 6 in our implementation of
SITE.
According to the observation mentioned in
Section 3.2, with a set of initial coordinates,
SITE can make sure whether the localization results are close to the real physical location within a threshold. If so, we can obtain a coordinate to regard as the user’s location. Next, we describe how to achieve it. Otherwise,
SITE refines calculated coordinates by VSFM technique. We describe it in
Section 4.4.
4.3. Decision Scheme
Due to many interference factors in an indoor environment, using Acoustic Doppler Effect to calculate coordinates mentioned in
Section 3.2 could lead to low stability and availability. To tackle this, we present a novel scheme to judge whether a coordinate estimated by a set of acoustic sources satisfies the observation result presented in
Section 3.2. Once it fails, module
Location Refinement is triggered to refine the estimated result as the user’s location. For reducing the interference from other factors, we exploit a searching algorithm to compute the initial location. Next, we introduce the judgement scheme (
Section 4.3.1) and the searching algorithm (
Section 4.3.2) in detail.
4.3.1. Judgement Scheme
Before describing the scheme, we firstly give the definition of
.
represents the state of a set of coordinates corresponding to a specific true physical coordinate, and it could be assigned to two states:
CONVERGED STATE and
DIVERGED STATE.
DIVERGED STATE means that a set of coordinates deviates from its true location and cannot be directly used. Contrarily, we mark this set as
CONVERGED STATE while we deem it to be convergence to its true location. According to our observation described in
Section 3.2, given a set of coordinates (
) computed at same spot, we can compute its
according to the following equation,
Here,
represents the standard deviation, and it can be computed as Equation (
6).
is a fixed threshold and is referred to as
Decision Factor. In the implementation, we choose
to be 0.3 m.
In
Section 3.2, through experiments, we observe that, when a set
has a
less than 0.3 m, the localization error of more than 80% localization results is less than 0.2 m. If both of its subsets also have a
less than 0.3 m, we consider that it could achieve the most accurate localization result. For simplicity, we define a notation
to represent this kind of set. Based on this, we propose a novel scheme to decide whether there is an estimated coordinate that is accurate enough to represent the localization result. In other words, we need to search for the largest
from the received acoustic sources in module
Section 4.2.
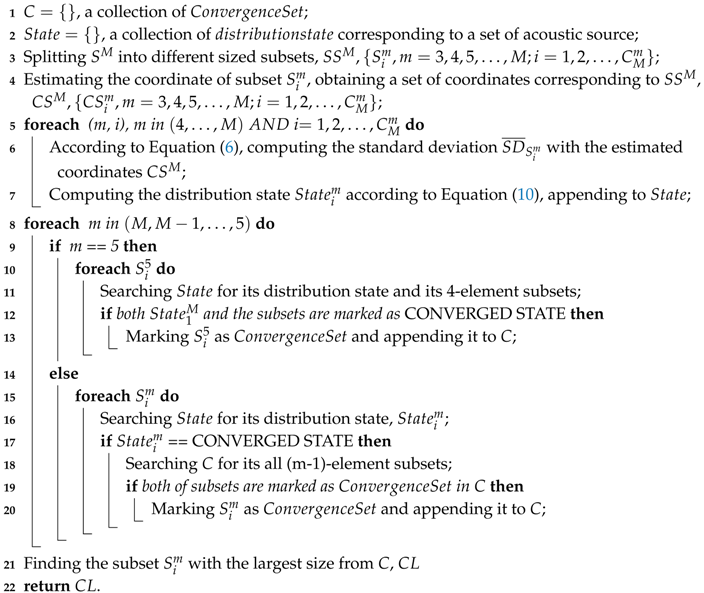
Here, we present a bottom-up searching algorithm to find out the . Given a set of source anchors, (M ≥ 4, represents its size), splitting it to many subsets with different size, these subsets are denoted as , and we refer to it as . represents the ith subset at the size of m. As mentioned above, a set labeled as must satisfy three requirements: (1) M is larger than 4; (2) is less than ; and (3) each element of is marked as CONVERGED STATE, or all the subsets are . The detailed searching procedure is given in Algorithm 1.
Through searching procedure, SITE computes a collection of . However, there are three results on the number of in : (a) more than 1; (b) only one; and (c) . According to our observation, when there is only one , the estimated coordinate by this set can be regarded as the user’s physical location. For the other two conditions, we take the following measures to compute user’s physical location.
For the case that there are more than one
, according to the searching algorithm, we know that these
s have the same size. Furthermore, as explained in
Section 3.2, when there are the same amount of anchors for localization,
and
will perform a positive correlation to a certain extent. Therefore, we deem that a
with least
can achieve the most accurate localization result. Hence,
SITE uses it to compute the user’s location. In addition, if there are more than one sets with the least
, which also means that these sets have same
, the center point of their corresponding estimated coordinates is deemed to be the user’s location.
For the other case, while an empty is returned, it reveals that the results estimated by module Acoustic Localization has been seriously affected by many indoor interference factors; thus, these results cannot be directly used. Moreover, no coordinate can be obtained according to the method mentioned above. Therefore, it is necessary to take a further step to estimate the user’s location.
| Algorithm 1: Procedure of searching largest . |
Input:
, a collection of acoustic sources, M is the size;
Output: , a collection of the biggest ;
![Sensors 18 02566 i001]() |
4.3.2. Finding the Optimal Coordinate
On the consideration that no effective method could discriminate and remove interference sources, and using more acoustic sources to compute coordinate has a higher probability to bring in more interference, we employ some four-element sets of acoustic anchors to search the optimal coordinate, and these sets should be
CONVERGED STATE. As above mentioned, in our implementation, we define the threshold
to be
m for assessing a set’s distribution state, but, it will often result in a condition that no four-element set is available for computing initial coordinate. To prevent this condition, we bring in another threshold
to reassess the distribution state of the four-element set. For balancing accuracy and availability, we choose
to be
m, which is respect to a mean localization error of
m as
Figure 4a shows.
Given
M foursized sets marked as
CONVERGED STATE, we generate
M coordinates,
,
. Coordinate
represents the estimated coordinate of
ith set, therefore, finding an optimal initial coordinate will be transformed into a minimum optimization problem, and it should have minimum cumulative distance relative to all these coordinates. Based on the observations in
Section 3.2, we assume that any set with different value of
, its corresponding estimated coordinate should have a different weight on the cumulative distance. Then, this minimum optimization problem can be expressed as Equation (
11), and it could be resolved by searching an unknown coordinate (
x,
y) that minimizes the error in fit.
where
is the weight of the estimated coordinate computed by
ith set of acoustic sources. In this paper, we deem that the lower
of a set is, the higher weight its corresponding coordinate has. For simplicity, we compute the weight
using (
12),
corresponds to the standard deviation of
ith set. Therefore, combining Equations (
11) and (
12), the minimum optimization problem of finding an optimal coordinate can be represented as Equation (
13),
In our implementation, we realize the gradient descent algorithm to solve this optimization problem. With this initial coordinate, SITE adopts VSFM technique to refine it to be the user’s physical location. We make a detailed introduction of refinement in the following section.
4.4. Position Refinement
Only relying on overlapping images, today’s vision techniques not only can reconstruct 3D point cloud, but also are impressively accurate at inferring relative distances and orientations. Based on this, we employ VSFM to technique to acquire relative coordinates for refining the initial coordinate that is estimated in module Decision Scheme. Then, the refined coordinate will be regarded as user’s physical location.
To get a precise three-dimensionl reconstruction for deriving the accurate camera’s relative locations, the user will be asked to take some photos. Following, after moving a few steps, s/he should repeat procedures of Acoustic Localization and Decision Scheme. It is noteworthy, that once SITE successfully gets in Decision Scheme, the module Position Refinement is not necessarily conducted. However, if SITE fails to find three times in succession, there are many images captured at K spots. With them, for each spot, SITE generates a relative coordinate using VSFM technique.
Accordingly, a user will have a set of pairs of two coordinates: (1) initial coordinate, namely optimal coordinate and detailed estimation is given in
Section 4.3.2; and (2) relative coordinate, generated by VSFM technique with images captured by camera. Each pair of coordinates satisfies the transformation relationship
as Equation (
14) shows,
where
and
represent a initial coordinate and a relative coordinate corresponding to a same spot, respectively. What the best situation is that there should be only one transformation exist. Unfortunately, for these pairs, the transformation relationships are different. Therefore, a suitable transformation between the initial coordinate and the relative coordinate should be found.
Assuming that there are
K initial locations
and
K relative locations
, an optimal transformation relationship between these pairs of coordinates should minimize the result, as shown in Equation (
15).
where the unknown transformation (
) is the key of the optimization problem. In general, the more pairs of coordinates we get, the more accurate a transformation relationship we can achieve. After obtaining the optimal transformation relationship, we can get the refined location as Equation (
16)
where vectors
and
are defined as the refined initial coordinate and its corresponding relative coordinate, respectively. Because at least three images are needed for 3D reconstruction, and based on the consideration of computation complexity and efficiency, we set
K to be 3 when implementing this module.
To sum up, we have introduced the detailed design of SITE, consisting of three main components, Acoustic Localization, Decision Scheme, and Location Refinement. In the following section, we present how to evaluate the performance of SITE, and make a comparative analysis of evaluation results.
6. Discussion
In this section, we discuss some potential concerns with SITE, and point out some further work based on SITE.
SITE should be capable of removing the interference of invalid location. In
Section 4.2,
SITE calculates a set of temporary locations for deciding whether these locations converge closely to the true physical location. Nevertheless, some invalid locations where localization errors are extraordinarily large exist among these temporary results. However, these invalid results not only aggregate the computation burden but also result in location dilution of precision. Hence, removal of the invalid locations will make progress with the efficiency and accuracy of
SITE.
SITE cannot estimate the object’s location in 3D space. As described in
Section 3.1,
SITE only considers 2D angle not 3D direction, and assumes the phone and acoustic anchors are approximately at the same height. Therefore, in the case of estimating an object’s 3D coordinate, this assumption is no longer suitable.
SITE can label the location with semantic information. Although
SITE performs accurately and robustly, this location is directly represented by numerical values. However, the semantic information, linked to some specific places, functions, etc. that a user can understand intuitively, is much more valuable than the absolute coordinate values. Moreover, it can satisfy much more user demands. For refining location,
SITE will require the user to take some photos to reconstruct a 3D space. Besides, we also can acquire environment information via image processing techniques, thus we can produce semantic information by associating with its coordinate. Meanwhile, we can generate a semantic map via crowdsourced automatic floor plan construction [
36,
37,
38].




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}