Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review



Abstract
1. Introduction
- It is inherently cumbersome and requires dedicated spaces and controlled environment, i.e., a motion analysis laboratory.
- It does not allow the measurement of tasks in open-field or requiring large spaces.
- It is expensive.
- It requires highly skilled operators.
- Methods based on matrix and/or pressure sensors used as insoles.
- Methods based on wearable load cells that directly measure three-dimensional GRF.
- Methods based on the kinematic data obtained by OS.
- Methods based on IMUs that measure motion of body segments and estimate GRF by means of a biomechanical model and/or machine learning methods.
2. Data Analysis
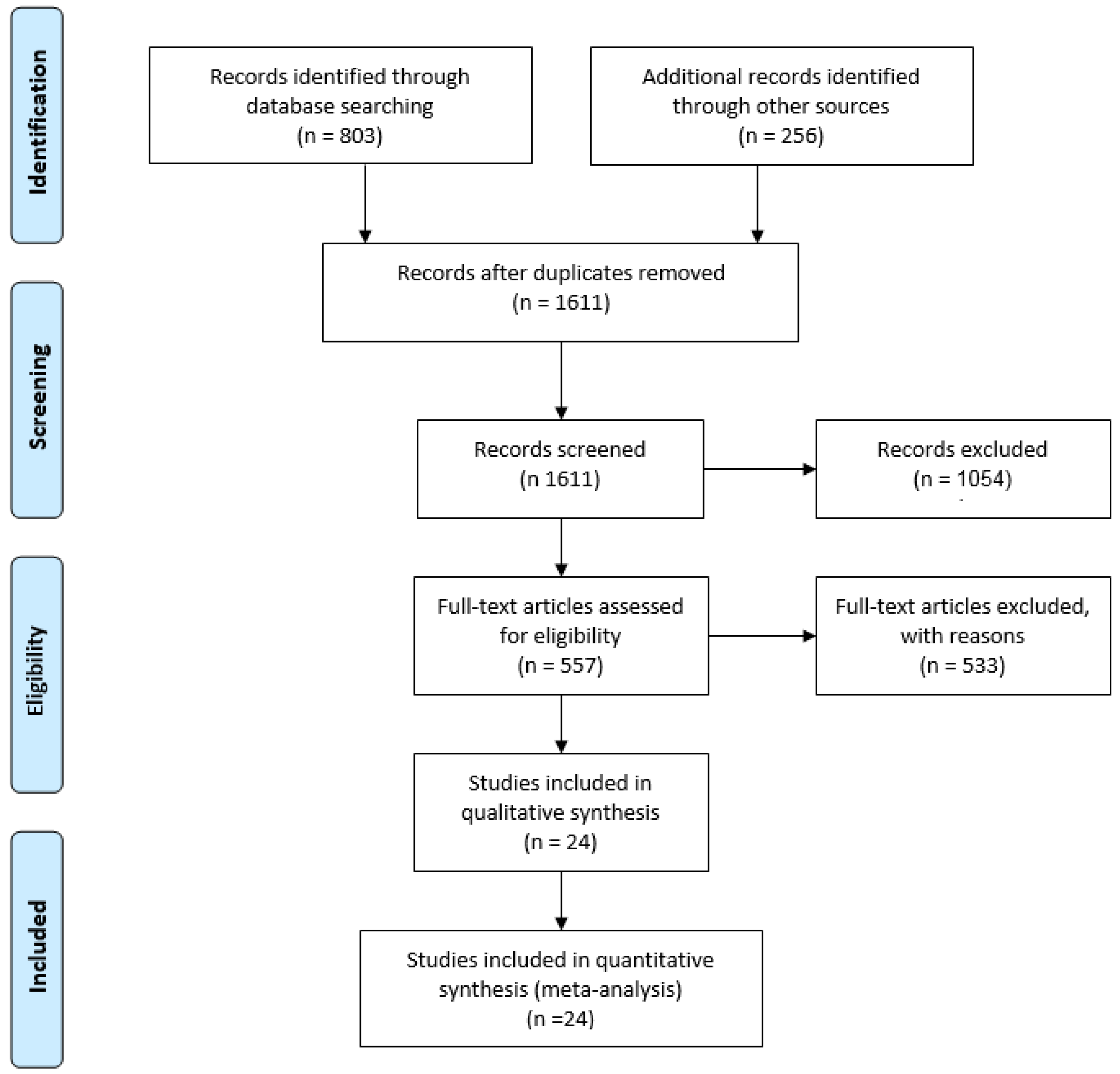
2.1. Search Strategy
2.2. Inclusion/Exclusion Criteria
3. Discussion
3.1. Methods Based on Biomechanical Modelling
3.1.1. Walking and Running
3.1.2. Jumping and Other Tasks
3.2. Methods Based on Machine Learning
4. Summary
5. Conclusions and Final Remarks
- (1)
- The number of sensors/body segments required for the biomechanical modelling
- (2)
- Knowledge of the inertial properties of each body segment
- (3)
- Determining the antero-posterior and medio-lateral components of GRF
- (4)
- Determining the GRF acting on each foot in double support conditions and evaluating loading asymmetry
- (5)
- Even if a correlation between predicted and directly measured GRF exists, it is difficult to estimate the absolute value of peak force.
Author Contributions
Funding
Conflicts of Interest
References
- Ancillao, A. Stereophotogrammetry in Functional Evaluation: History and Modern Protocols. In SpringerBriefs in Applied Sciences and Technology; Springer International Publishing AG: Basel, Switzerland, 2018; pp. 1–29. ISBN 978-3-319-67436-0. [Google Scholar] [CrossRef]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef]
- Chuckpaiwong, B.; Nunley, J.A.; Mall, N.A.; Queen, R.M. The effect of foot type on in-shoe plantar pressure during walking and running. Gait Posture 2008, 28, 405–411. [Google Scholar] [CrossRef] [PubMed]
- Tessutti, V.; Trombini-Souza, F.; Ribeiro, A.P.; Nunes, A.L.; de Sacco, I.C.N. In-shoe plantar pressure distribution during running on natural grass and asphalt in recreational runners. J. Sci. Med. Sport 2010, 13, 151–155. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.; Thorstensson, A. Ground reaction forces at different speeds of human walking and running. Acta Physiol. Scand. 1989, 136, 217–227. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; van der Krogt, M.M.M.; Buizer, A.I.A.I.; Witbreuk, M.M.M.; Cappa, P.; Harlaar, J. Analysis of gait patterns pre- and post- Single Event Multilevel Surgery in children with Cerebral Palsy by means of Offset-Wise Movement Analysis Profile and Linear Fit Method. Hum. Mov. Sci. 2017, 55, 145–155. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Galli, M.; Rigoldi, C.; Albertini, G. Linear correlation between fractal dimension of surface EMG signal from Rectus Femoris and height of vertical jump. Chaos Solitons Fractals 2014, 66, 120–126. [Google Scholar] [CrossRef]
- Charbonnier, C.; Chagué, S.; Ponzoni, M.; Bernardoni, M.; Hoffmeyer, P.; Christofilopoulos, P. Sexual activity after total hip arthroplasty: A motion capture study. J. Arthroplast. 2014, 29, 640–647. [Google Scholar] [CrossRef] [PubMed]
- Ancillao, A.; Savastano, B.; Galli, M.; Albertini, G. Three dimensional motion capture applied to violin playing: A study on feasibility and characterization of the motor strategy. Comput. Methods Prog. Biomed. 2017, 149, 19–27. [Google Scholar] [CrossRef] [PubMed]
- Owings, T.M.; Grabiner, M.D. Measuring step kinematic variability on an instrumented treadmill: How many steps are enough? J. Biomech. 2003, 36, 1215–1218. [Google Scholar] [CrossRef]
- Van Gelder, L.; Booth, A.T.C.; van de Port, I.; Buizer, A.I.; Harlaar, J.; van der Krogt, M.M. Real-time feedback to improve gait in children with cerebral palsy. Gait Posture 2017, 52, 76–82. [Google Scholar] [CrossRef] [PubMed]
- Van der Krogt, M.M.; Sloot, L.H.; Harlaar, J. Overground versus self-paced treadmill walking in a virtual environment in children with cerebral palsy. Gait Posture 2014, 40, 587–593. [Google Scholar] [CrossRef] [PubMed]
- Najafi, B.; Khan, T.; Wrobel, J. Laboratory in a box: Wearable sensors and its advantages for gait analysis. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBS), Boston, MA, USA, 30 August–3 September 2011; pp. 6507–6510. [Google Scholar]
- Abdul Razak, A.H.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed]
- Davis, B.L.; Perry, J.E.; Neth, D.C.; Waters, K.C. A Device for Simultaneous Measurement of Pressure and Shear Force Distribution on the Plantar Surface of the Foot. J. Appl. Biomech. 1998, 14, 93–104. [Google Scholar] [CrossRef]
- Razian, M.A.; Pepper, M.G. Design, development, and characteristics of an in-shoe triaxial pressure measurement transducer utilizing a single element of piezoelectric copolymer film. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 288–293. [Google Scholar] [CrossRef] [PubMed]
- Faber, G.S.; Kingma, I.; Martin Schepers, H.; Veltink, P.H.; van Dieën, J.H. Determination of joint moments with instrumented force shoes in a variety of tasks. J. Biomech. 2010, 43, 2848–2854. [Google Scholar] [CrossRef] [PubMed]
- Liedtke, C.; Fokkenrood, S.A.W.; Menger, J.T.; van der Kooij, H.; Veltink, P.H. Evaluation of instrumented shoes for ambulatory assessment of ground reaction forces. Gait Posture 2007, 26, 39–47. [Google Scholar] [CrossRef] [PubMed]
- Fong, D.T.P.; Chan, Y.Y.; Hong, Y.; Yung, P.S.H.; Fung, K.Y.; Chan, K.M. Estimating the complete ground reaction forces with pressure insoles in walking. J. Biomech. 2008, 41, 2597–2601. [Google Scholar] [CrossRef] [PubMed]
- Shahabpoor, E.; Pavic, A. Measurement of Walking Ground Reactions in Real-Life Environments: A Systematic Review of Techniques and Technologies. Sensors 2017, 17, 2085. [Google Scholar] [CrossRef] [PubMed]
- Tedesco, S.; Urru, A.; Clifford, A.; O’Flynn, B. Experimental Validation of the Tyndall Portable Lower-Limb Analysis System with Wearable Inertial Sensors. Procedia Eng. 2016, 147, 208–213. [Google Scholar] [CrossRef]
- Troiano, R.P.; McClain, J.J.; Brychta, R.J.; Chen, K.Y. Evolution of accelerometer methods for physical activity research. Br. J. Sports Med. 2014, 48, 1019–1023. [Google Scholar] [CrossRef] [PubMed]
- Rowlands, A.V.; Mirkes, E.M.; Yates, T.; Clemes, S.; Davies, M.; Khunti, K.; Edwardson, C.L. Accelerometer-assessed Physical Activity in Epidemiology. Med. Sci. Sports Exerc. 2018, 50, 257–265. [Google Scholar] [CrossRef] [PubMed]
- Tedesco, S.; Barton, J.; O’Flynn, B. A Review of Activity Trackers for Senior Citizens: Research Perspectives, Commercial Landscape and the Role of the Insurance Industry. Sensors 2017, 17, 1277. [Google Scholar] [CrossRef] [PubMed]
- Liberati, A.; Altman, D.G.; Tetzlaff, J.; Mulrow, C.; Gøtzsche, P.C.; Ioannidis, J.P.A.; Clarke, M.; Devereaux, P.J.; Kleijnen, J.; Moher, D. The PRISMA Statement for Reporting Systematic Reviews and Meta-Analyses of Studies That Evaluate Health Care Interventions: Explanation and Elaboration. PLoS Med. 2009, 6, e1000100. [Google Scholar] [CrossRef] [PubMed]
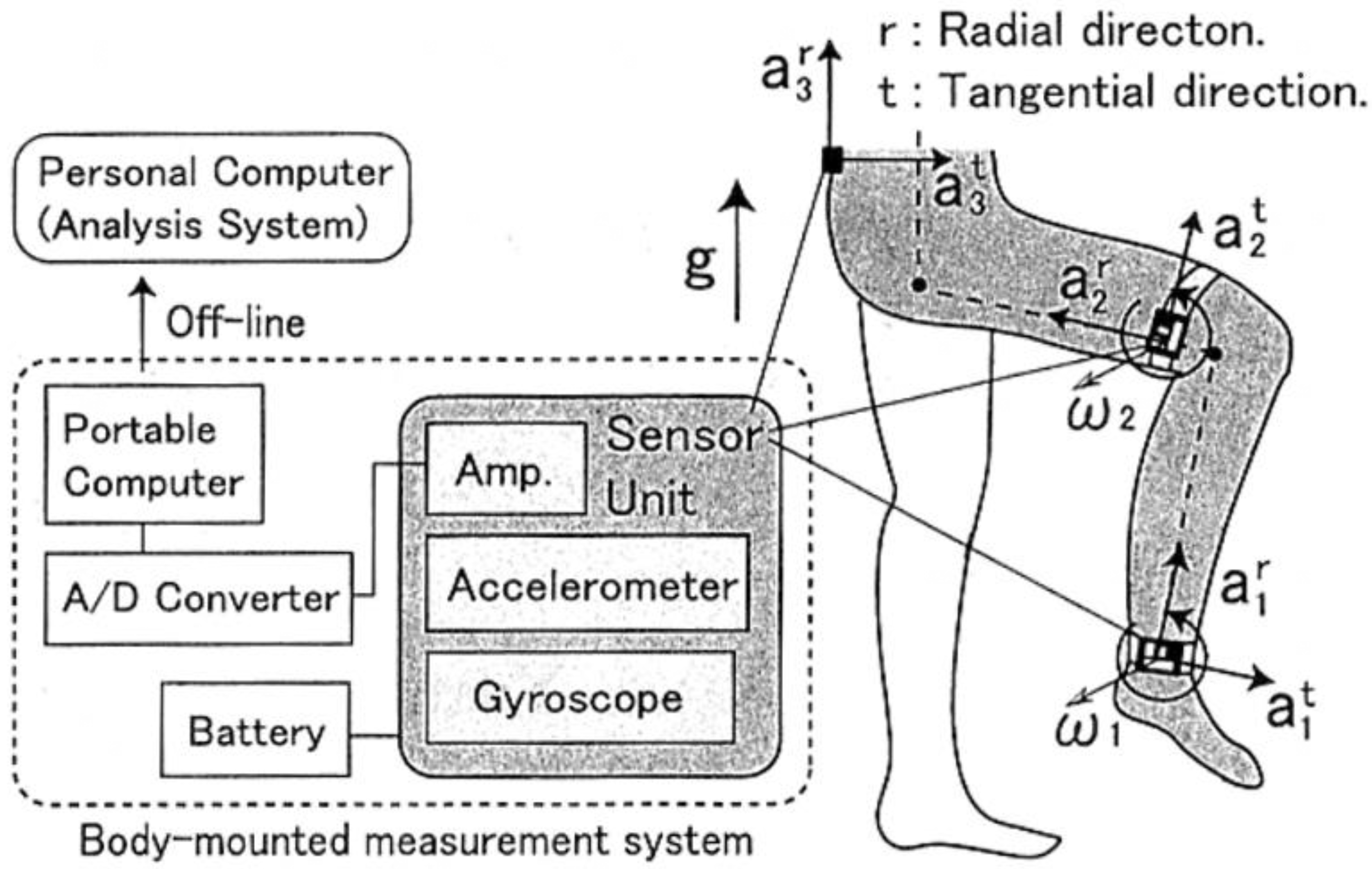
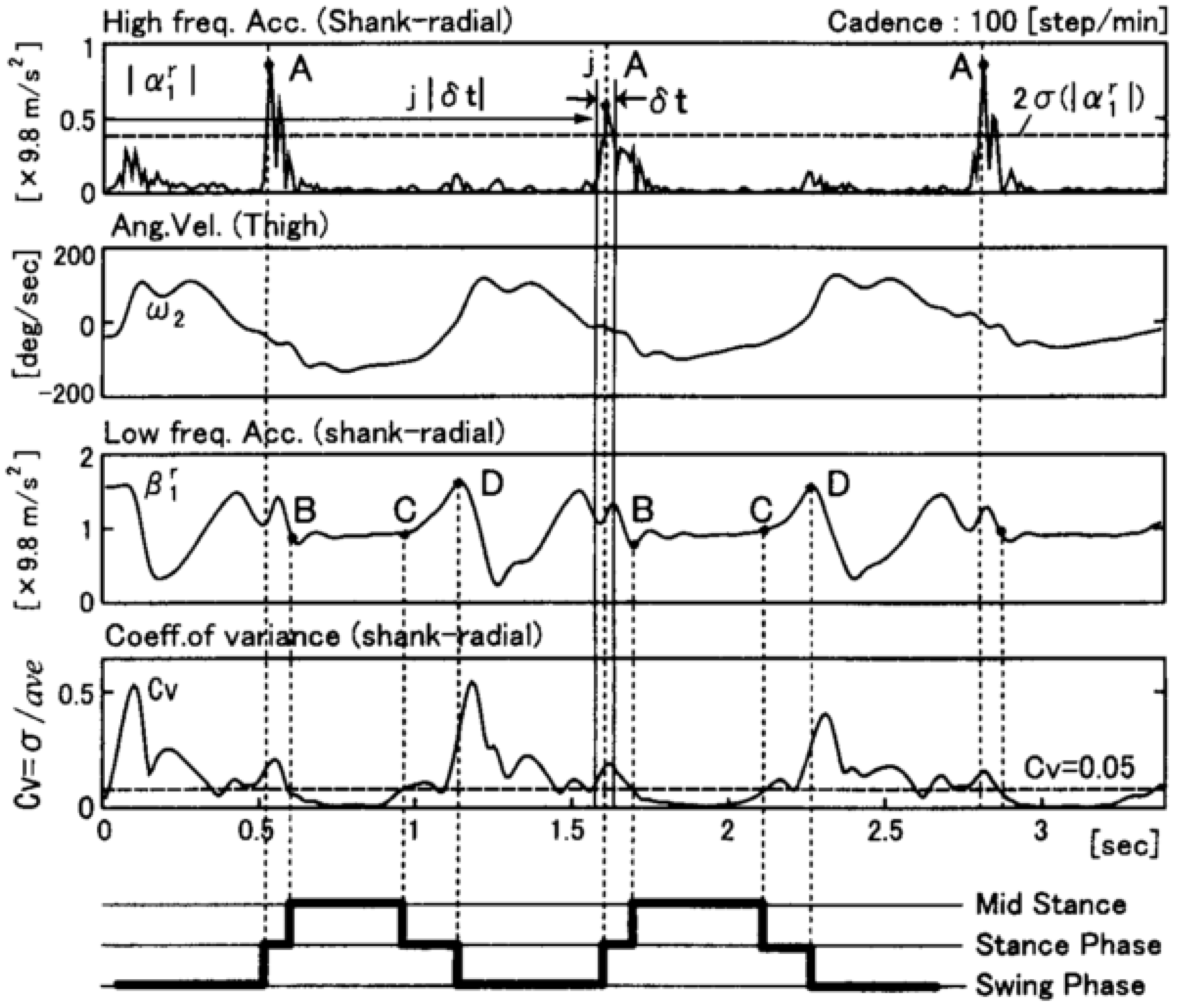
- Ohtaki, Y.; Sagawa, K.; Inooka, H. A Method for Gait Analysis in a Daily Living Environment by Body-Mounted Instruments. JSME Int. J. Ser. C 2001, 44, 1125–1132. [Google Scholar] [CrossRef]
- De Leva, P. Adjustments to Zatsiorsky-Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef]
- Neugebauer, J.M.; Hawkins, D.A.; Beckett, L. Estimating Youth Locomotion Ground Reaction Forces Using an Accelerometer-Based Activity Monitor. PLoS ONE 2012, 7, e48182. [Google Scholar] [CrossRef] [PubMed]
- Fox, J.; Weisberg, S. Mixed-Effects Models in R. In An R Companion to Applied Regression; SAGE: Thousand Oaks, CA, USA, 2002; ISBN 9781412975148. [Google Scholar]
- Neugebauer, J.M.; Collins, K.H.; Hawkins, D.A. Ground Reaction Force Estimates from ActiGraph GT3X+ Hip Accelerations. PLoS ONE 2014, 9, e99023. [Google Scholar] [CrossRef] [PubMed]
- Wundersitz, D.W.T.; Netto, K.J.; Aisbett, B.; Gastin, P.B. Validity of an upper-body-mounted accelerometer to measure peak vertical and resultant force during running and change-of-direction tasks. Sports Biomech. 2013, 12, 403–412. [Google Scholar] [CrossRef] [PubMed]
- Nigg, B.M.; Liu, W. The effect of muscle stiffness and damping on simulated impact force peaks during running. J. Biomech. 1999, 32, 849–856. [Google Scholar] [CrossRef]
- Young, W.B.; Hepner, J.; Robbins, D.W. Movement Demands in Australian Rules Football as Indicators of Muscle Damage. J. Strength Cond. Res. 2012, 26, 492–496. [Google Scholar] [CrossRef] [PubMed]
- Kelly, D.; Coughlan, G.F.; Green, B.S.; Caulfield, B. Automatic detection of collisions in elite level rugby union using a wearable sensing device. Sports Eng. 2012, 15, 81–92. [Google Scholar] [CrossRef]
- Paul, G.M.; David, B.P.; Clare, L.M. The Physical and Physiological Demands of Basketball Training and Competition. Int. J. Sports Physiol. Perform. 2010, 5, 75–86. [Google Scholar] [CrossRef]
- McLellan, C.P.; Lovell, D.I.; Gass, G.C. Creatine kinase and endocrine responses of elite players pre, during, and post rugby league match play. J. Strength Cond. Res. 2010, 24, 2908–2919. [Google Scholar] [CrossRef] [PubMed]
- Charry, E.; Hu, W.; Umer, M.; Ronchi, A.; Taylor, S. Study on estimation of peak Ground Reaction Forces using tibial accelerations in running. In Proceedings of the 2013 IEEE Eighth International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Melbourne, Australia, 2–5 April 2013; pp. 288–293. [Google Scholar] [CrossRef]
- Lafortune, M.A.; Henning, E.; Valiant, G.A. Tibial shock measured with bone and skin mounted transducers. J. Biomech. 1995, 28, 989–993. [Google Scholar] [CrossRef]
- Meyer, U.; Ernst, D.; Schott, S.; Riera, C.; Hattendorf, J.; Romkes, J.; Granacher, U.; Göpfert, B.; Kriemler, S. Validation of two accelerometers to determine mechanical loading of physical activities in children. J. Sports Sci. 2015, 33, 1702–1709. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.Y.; Bassett, D.R. The technology of accelerometry-based activity monitors: Current and future. Med. Sci. Sports Exerc. 2005, 37, S490–S500. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A.; Quanbury, A.O.; Reimer, G.D. Analysis of instantaneous energy of normal gait. J. Biomech. 1976, 9, 253–257. [Google Scholar] [CrossRef]
- Vainionpää, A.; Korpelainen, R.; Sievänen, H.; Vihriälä, E.; Leppäluoto, J.; Jämsä, T. Effect of impact exercise and its intensity on bone geometry at weight-bearing tibia and femur. Bone 2007, 40, 604–611. [Google Scholar] [CrossRef] [PubMed]
- Vainionpää, A.; Korpelainen, R.; Vihriälä, E.; Rinta-Paavola, A.; Leppäluoto, J.; Jämsä, T. Intensity of exercise is associated with bone density change in premenopausal women. Osteoporos. Int. 2006, 17, 455–463. [Google Scholar] [CrossRef] [PubMed]
- Yang, E.C.-Y.; Mao, M.-H. 3D analysis system for estimating intersegmental forces and moments exerted on human lower limbs during walking motion. Measurement 2015, 73, 171–179. [Google Scholar] [CrossRef]
- Karatsidis, A.; Bellusci, G.; Schepers, H.; de Zee, M.; Andersen, M.; Veltink, P. Estimation of Ground Reaction Forces and Moments During Gait Using Only Inertial Motion Capture. Sensors 2017, 17, 75. [Google Scholar] [CrossRef] [PubMed]
- Newton, I. Philosophiae Naturalis Principia Mathematica; Harvard University Press: Cambridge, MA, USA, 1687; ISBN 0674664752. [Google Scholar]
- Ren, L.; Jones, R.K.; Howard, D. Whole body inverse dynamics over a complete gait cycle based only on measured kinematics. J. Biomech. 2008, 41, 2750–2759. [Google Scholar] [CrossRef] [PubMed]
- Galli, M.; Crivellini, M.; Sibella, F.; Montesano, A.; Bertocco, P.; Parisio, C. Sit-to-stand movement analysis in obese subjects. Int. J. Obes. 2000, 24, 1488–1492. [Google Scholar] [CrossRef]
- Cotton, S.; Vanoncini, M.; Fraisse, P.; Ramdani, N.; Demircan, E.; Murray, A.P.; Keller, T. Estimation of the centre of mass from motion capture and force plate recordings: A study on the elderly. Appl. Bionics Biomech. 2011, 8, 67–84. [Google Scholar] [CrossRef]
- Anderson, F.C.; Pandy, M.G. Dynamic Optimization of Human Walking. J. Biomech. Eng. 2001, 123, 381–390. [Google Scholar] [CrossRef] [PubMed]
- Hamner, S.R.; Seth, A.; Delp, S.L. Muscle contributions to propulsion and support during running. J. Biomech. 2010, 43, 2709–2716. [Google Scholar] [CrossRef] [PubMed]
- Koopman, B.; Grootenboer, H.J.; de Jongh, H.J. An inverse dynamics model for the analysis, reconstruction and prediction of bipedal walking. J. Biomech. 1995, 28, 1369–1376. [Google Scholar] [CrossRef]
- Dijkstra, E.J.; Gutierrez-Farewik, E.M. Computation of ground reaction force using Zero Moment Point. J. Biomech. 2015, 48, 3776–3781. [Google Scholar] [CrossRef] [PubMed]
- Vukobratović, M.; Borovac, B. Zero-Moment Point—Thirty Five Years of Its Life. Int. J. Humanoid Robot. 2004, 1, 157–173. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed]
- Gurchiek, R.D.; McGinnis, R.S.; Needle, A.R.; McBride, J.M.; van Werkhoven, H. The use of a single inertial sensor to estimate 3-dimensional ground reaction force during accelerative running tasks. J. Biomech. 2017, 61, 263–268. [Google Scholar] [CrossRef] [PubMed]
- Cerrito, A.; Bichsel, L.; Radlinger, L.; Schmid, S. Reliability and validity of a smartphone-based application for the quantification of the sit-to-stand movement in healthy seniors. Gait Posture 2015, 41, 409–413. [Google Scholar] [CrossRef] [PubMed]
- Sabatini, A.M. Estimating Three-Dimensional Orientation of Human Body Parts by Inertial/Magnetic Sensing. Sensors 2011, 11, 1489–1525. [Google Scholar] [CrossRef] [PubMed]
- Raper, D.P.; Witchalls, J.; Philips, E.J.; Knight, E.; Drew, M.K.; Waddington, G. Use of a tibial accelerometer to measure ground reaction force in running: A reliability and validity comparison with force plates. J. Sci. Med. Sport 2018, 21, 84–88. [Google Scholar] [CrossRef] [PubMed]
- Aurbach, M.; Wagner, K.; Süß, F.; Dendorfer, S. Implementation and Validation of Human Kinematics Measured Using IMUs for Musculoskeletal Simulations by the Evaluation of Joint Reaction Forces. IFMBE Proc. 2017, 62, 205–211. [Google Scholar] [CrossRef]
- Palermo, E.; Rossi, S.; Patanè, F.; Cappa, P. Experimental evaluation of indoor magnetic distortion effects on gait analysis performed with wearable inertial sensors. Physiol. Meas. 2014, 35, 399–415. [Google Scholar] [CrossRef] [PubMed]
- Thiel, D.V.; Shepherd, J.; Espinosa, H.G.; Kenny, M.; Fischer, K.; Worsey, M.; Matsuo, A.; Wada, T. Predicting Ground Reaction Forces in Sprint Running Using a Shank Mounted Inertial Measurement Unit. Proceedings 2018, 2, 199. [Google Scholar] [CrossRef]
- Kiernan, D.; Hawkins, D.A.; Manoukian, M.A.C.; McKallip, M.; Oelsner, L.; Caskey, C.F.; Coolbaugh, C.L. Accelerometer-based prediction of running injury in National Collegiate Athletic Association track athletes. J. Biomech. 2018, 73, 201–209. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.B.; Mellifont, R.B.; Burkett, B.J. The use of a single inertial sensor to identify stride, step, and stance durations of running gait. J. Sci. Med. Sport 2010, 13, 270–273. [Google Scholar] [CrossRef] [PubMed]
- Elvin, N.G.; Elvin, A.A.; Arnoczky, S.P. Correlation between Ground Reaction Force and Tibial Acceleration in Vertical Jumping. J. Appl. Biomech. 2007, 23, 180–189. [Google Scholar] [CrossRef] [PubMed]
- Linthorne, N.P. Analysis of standing vertical jumps using a force platform. Am. J. Phys. 2001, 69, 1198–1204. [Google Scholar] [CrossRef]
- Howard, R.; Conway, R.; Harrison, A.J. Estimation of force during vertical jumps using body fixed accelerometers. In Proceedings of the 25th IET Irish Signals & Systems Conference, Limerick, Ireland, 26–27 June 2013; Institution of Engineering and Technology: Stevenage, UK, 2014; pp. 102–107. [Google Scholar]
- Pouliot-Laforte, A.; Veilleux, L.N.; Rauch, F.; Lemay, M. Validity of an accelerometer as a vertical ground reaction force measuring device in healthy children and adolescents and in children and adolescents with osteogenesis imperfecta type I. J. Musculoskelet. Neuronal Interact. 2014, 14, 155–161. [Google Scholar] [PubMed]
- Engelbert, R.H.; Beemer, F.A.; van der Graaf, Y.; Helders, P.J. Osteogenesis imperfecta in childhood: Impairment and disability—A follow-up study. Arch. Phys. Med. Rehabil. 1999, 80, 896–903. [Google Scholar] [CrossRef]
- Takken, T.; Terlingen, H.C.; Helders, P.J.M.; Pruijs, H.; Van der Ent, C.K.; Engelbert, R.H.H. Cardiopulmonary fitness and muscle strength in patients with osteogenesis imperfecta type I. J. Pediatr. 2004, 145, 813–818. [Google Scholar] [CrossRef] [PubMed]
- Min, S.; Kim, J. Inertial sensor based inverse dynamics analysis of human motions. In Proceedings of the IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Busan, Korea, 7–11 July 2015; pp. 177–182. [Google Scholar] [CrossRef]
- Logar, G.; Munih, M. Estimation of Joint Forces and Moments for the In-Run and Take-Off in Ski Jumping Based on Measurements with Wearable Inertial Sensors. Sensors 2015, 15, 11258–11276. [Google Scholar] [CrossRef] [PubMed]
- Faber, G.S.; Chang, C.C.; Kingma, I.; Dennerlein, J.T.; van Dieën, J.H. Estimating 3D L5/S1 moments and ground reaction forces during trunk bending using a full-body ambulatory inertial motion capture system. J. Biomech. 2016, 49, 904–912. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.; Nussbaum, M.A. Performance evaluation of a wearable inertial motion capture system for capturing physical exposures during manual material handling tasks. Ergonomics 2013, 56, 314–326. [Google Scholar] [CrossRef] [PubMed]
- Roetenberg, D.; Luinge, H.; Slycke, P. Xsens MVN: Full 6DOF Human Motion Tracking Using Miniature Inertial Sensors; Xsens Motion Technologies BV, Technical Report; Xsens: Enschede, The Netherlands, 2009; pp. 1–9. [Google Scholar]
- Kodama, J.; Watanabe, T. Examination of Inertial Sensor-Based Estimation Methods of Lower Limb Joint Moments and Ground Reaction Force: Results for Squat and Sit-to-Stand Movements in the Sagittal Plane. Sensors 2016, 16, 1209. [Google Scholar] [CrossRef] [PubMed]
- Clauser, C.E.; McConville, J.T.; Young, J.W. Weight, Volume, and Center of Mass of Segments of the Human Body; AMRL-TR-69-70 (AD 710 622); National Technical Information Service: Springfield, VA, USA, 1969; pp. 1–112.
- Ae, M.; Tang, H.P.; Yokoi, T. Estimation of inertia properties of the body segments in Japanese athletes. Soc. Biomech. Jpn. 1992, 11, 23–33. (In Japanese) [Google Scholar] [CrossRef]
- AIST Human Body Size Database. Available online: https://www.dh.aist.go.jp/database/91-92/ (accessed on 25 April 2016).
- Setuain, I.; Martinikorena, J.; Gonzalez-Izal, M.; Martinez-Ramirez, A.; Gómez, M.; Alfaro-Adrián, J.; Izquierdo, M. Vertical jumping biomechanical evaluation through the use of an inertial sensor-based technology. J. Sports Sci. 2016, 34, 843–851. [Google Scholar] [CrossRef] [PubMed]
- Oh, S.E.; Choi, A.; Mun, J.H. Prediction of ground reaction forces during gait based on kinematics and a neural network model. J. Biomech. 2013, 46, 2372–2380. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, D.A.; Ferris, D.P. Estimation of ground reaction forces and ankle moment with multiple, low-cost sensors. J. Neuroeng. Rehabil. 2015, 12, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Muniz, A.M.S.; Liu, H.; Lyons, K.E.; Pahwa, R.; Liu, W.; Nobre, F.F.; Nadal, J. Comparison among probabilistic neural network, support vector machine and logistic regression for evaluating the effect of subthalamic stimulation in Parkinson disease on ground reaction force during gait. J. Biomech. 2010, 43, 720–726. [Google Scholar] [CrossRef] [PubMed]
- Kohle, M.; Merkl, D.; Kastner, J. Clinical gait analysis by neural networks: Issues and experiences. In Proceedings of the Computer Based Medical Systems, Maribor, Slovenia, 11–13 June 1997; pp. 138–143. [Google Scholar] [CrossRef]
- Choi, A.; Lee, J.-M.; Mun, J.H. Ground reaction forces predicted by using artificial neural network during asymmetric movements. Int. J. Precis. Eng. Manuf. 2013, 14, 475–483. [Google Scholar] [CrossRef]
- Leporace, G.; Batista, L.A.; Metsavaht, L.; Nadal, J. Residual analysis of ground reaction forces simulation during gait using neural networks with different configurations. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; pp. 2812–2815. [Google Scholar]
- Guo, Y.; Storm, F.; Zhao, Y.; Billings, S.; Pavic, A.; Mazzà, C.; Guo, L.-Z. A New Proxy Measurement Algorithm with Application to the Estimation of Vertical Ground Reaction Forces Using Wearable Sensors. Sensors 2017, 17, 2181. [Google Scholar] [CrossRef] [PubMed]
- Storm, F.A.; Buckley, C.J.; Mazzà, C. Gait event detection in laboratory and real life settings: Accuracy of ankle and waist sensor based methods. Gait Posture 2016, 50, 42–46. [Google Scholar] [CrossRef] [PubMed]
- Wouda, F.J.; Giuberti, M.; Bellusci, G.; Maartens, E.; Reenalda, J.; van Beijnum, B.J.F.; Veltink, P.H. Estimation of vertical ground reaction forces and sagittal knee kinematics during running using three inertial sensors. Front. Physiol. 2018, 9, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Koch, M.; Lunde, L.-K.; Ernst, M.; Knardahl, S.; Veiersted, K.B. Validity and reliability of pressure-measurement insoles for vertical ground reaction force assessment in field situations. Appl. Ergon. 2016, 53, 44–51. [Google Scholar] [CrossRef] [PubMed]
- Price, C.; Parker, D.; Nester, C. Validity and repeatability of three in-shoe pressure measurement systems. Gait Posture 2016, 46, 69–74. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Inoue, Y.; Shibata, K.; Shiojima, K.; Han, M.M. Triaxial joint moment estimation using a wearable three-dimensional gait analysis system. Measurement 2014, 47, 125–129. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Year | Task | No. of Segments | Sensor Type/IMU | Sensor Positioning | Subjects Studied | Method | Reported RMSE or Other Inaccuracy Measures (Worst Case) | Outcomes and Remarks |
|---|---|---|---|---|---|---|---|---|---|
| Ohtaki et al. [26] | 2001 | Gait | 5 | 1D Acc, 1D Gyro | Distal shank and thigh | Healthy adults | Newton’s Law of motion | Vertical: 0.31 ± 0.012 N/BW Horizontal: 0.076 ± 0.031 N/BW | Gait phase identification. Spectral analysis of acceleration. |
| Elvin et al. [65] | 2007 | Vertical jump | 2 | 1D Acc. | Shank | Male athletes | Correlation | Correlation R2 = 0.748 | Correlation between peak GRF and peak tibial acceleration. Computation of the flying time. |
| Neugebauer et al. [28] | 2012 | Walking, running | 1 | 2D Acc. | Iliac crest of the right hip | Healthy teenagers | Statistical Model. | 9.0 ± 4.2% | Estimation of peak ground reaction force |
| Neugebauer et al. [30] | 2014 | Walking, running | 1 | 3D Acc. | Iliac crest of the right hip | Healthy adults | Statistical model | Vertical: 8.3 ± 3.7% Braking: 17.8 ± 4.0% | Estimation of peak vertical and peak braking ground reaction forces. Acceleration of hip does not estimate correctly GRF. Worst case: running. |
| Howard et al. [67] | 2014 | Counter and drop jump | 1 | 3D Acc. | Pelvis | Healthy adults | Newton’s Law of motion | Counter jump: 35.8% Drop jump: 53.6% | Estimated GRF did not match the measured GRF. |
| Wundersitz et al. [31] | 2013 | Running, direction change | 1 | 3D Acc. | Upper back, T2 | Healthy adults | Newton’s Law of motion | ~24% | Acceleration signal needed to be smoothed. |
| Charry et al. [37] | 2013 | Running | 2 | 3D Acc. | Medial tibia | Healthy adults | Correlation | 8.28% | Implemented gait events identification. Logarithmic correlation observed between acceleration and peak GRF. |
| Pouliot-Laforte et al. [68] | 2014 | Vertical jump | 1 | 3D Acc. | Right Hip | Children and teenagers with “osteogenesis imperfect” | Newton’s Law of motion | 31% | Good correlation between the GRF estimated and the one directly measured. |
| Min et al. [71] | 2015 | Squat | 3 | 3D Acc, 3D Gyro, 3D Mag. | Lumbar spine, thigh, shank | Healthy adults | Inverse dynamics/Newton’s Law of motion | R = 0.93 0.02 BW | High accuracy of estimated GRF. High correlation between acceleration and GRF. |
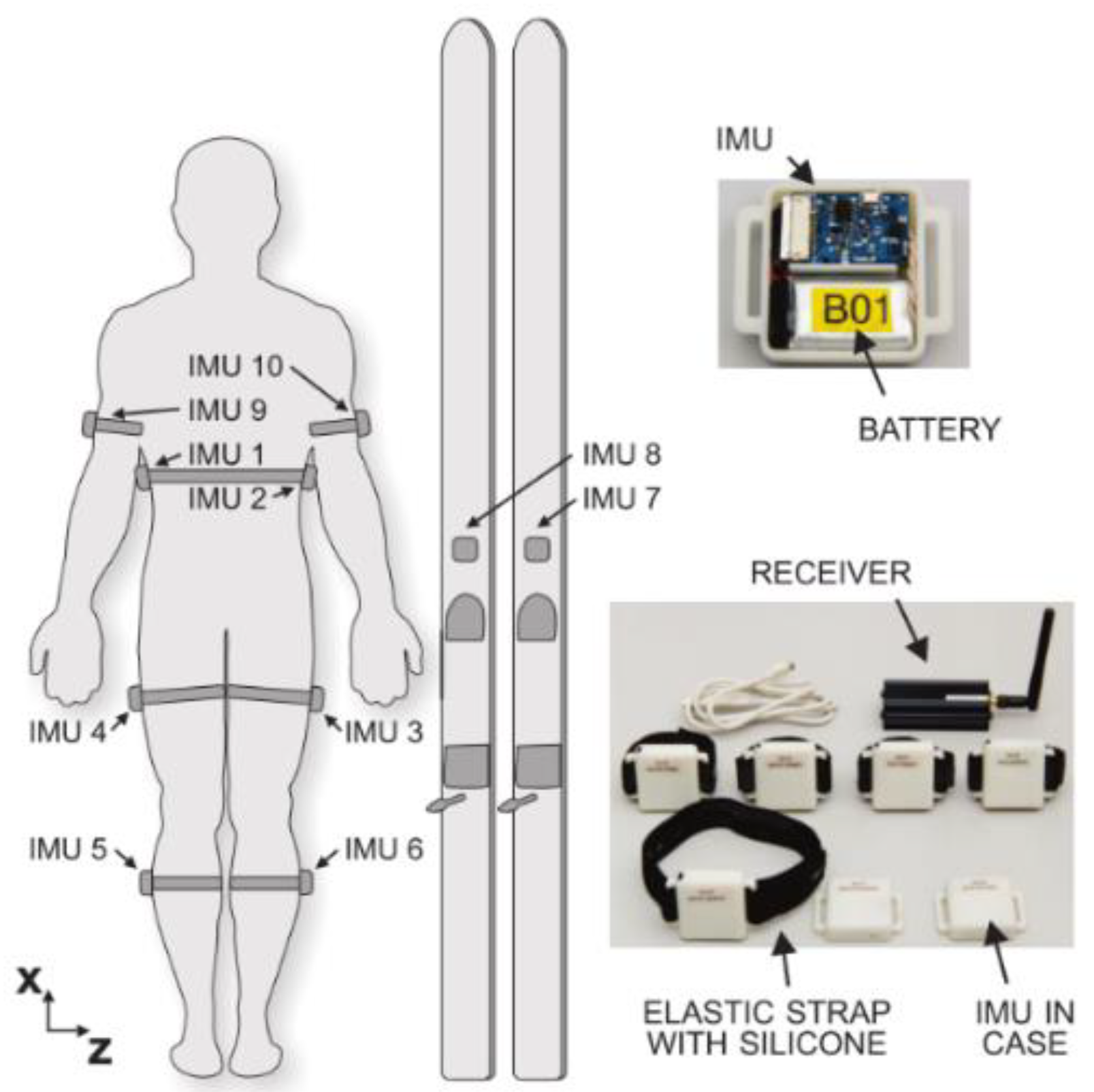
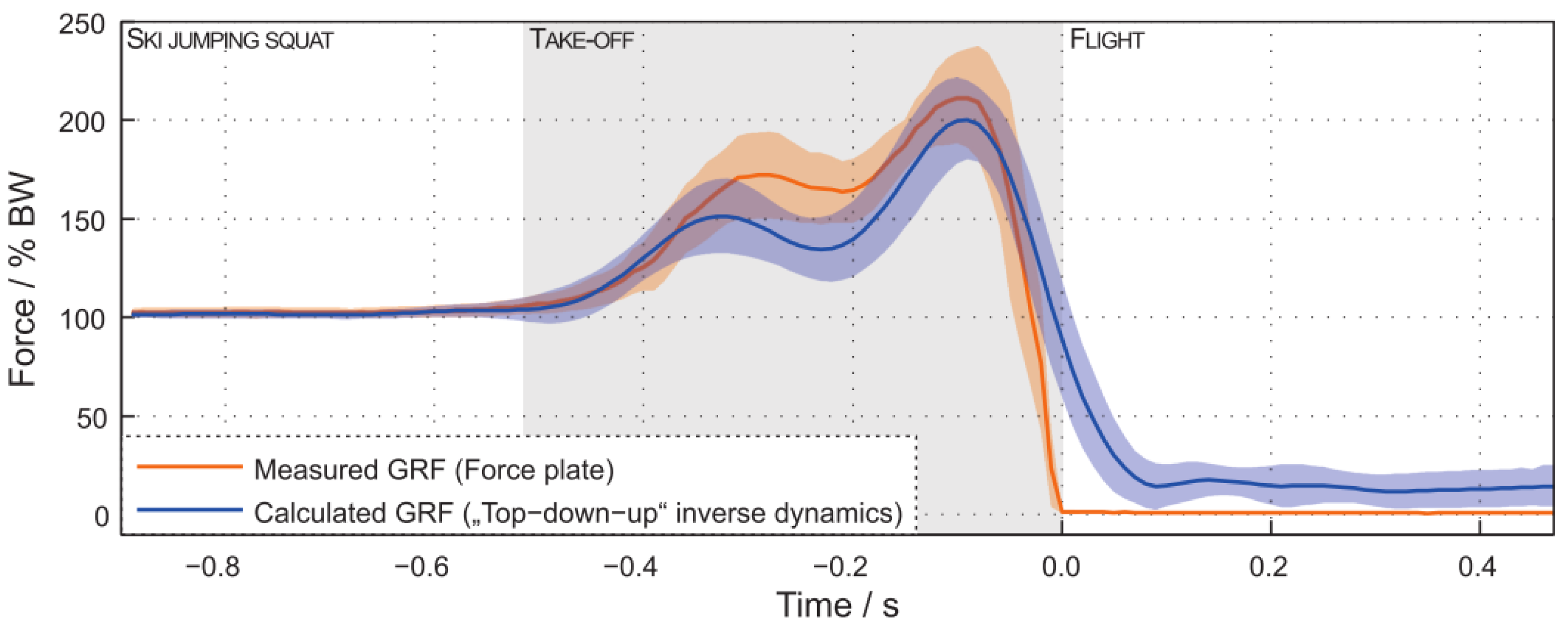
| Logar and Munih [72]. | 2015 | Ski Jumping | 10 | 3D Acc, 3D Gyro, 3D Mag. | Total body tracking | Athletes–ski-jumpers | Biomechanical model and inverse dynamics. | 12 ± 13% | Required calibration procedure. Good similarity between measured and calculated GRF. |
| Meyer et al. [39] | 2015 | Walking, jogging, running, landing and other tasks | 1 | 3D Acc. | Right hip | Healthy Children | Newton’s Law of motion | R = 0.89 | Good correlation between acceleration and measured GRF although GRF were overestimated by accelerometer method. |
| Yang et al. [44] | 2015 | Walking | 7 | 3D Acc, 3D Gyro | Trunk, thigh, shank, foot. | Healthy adults | Biomechanical model 3D | R = 0.95 66 N | Estimation of the Intersegmental forces and GRF. Identification of walking cycle. |
| Leporace et al. [86] | 2015 | Walking | 1 | 3D Acc. | Shank | Healthy adults | Machine learning | Vertical: 5.2 ± 1.7% BW Antero-Posterior: 5.4 ± 1.8% BW Medio-Lateral: 13.0 ± 6.1% BW | Good prediction of all the components of GRF. |
| Faber et al. [73]. | 2016 | Bending | 17 | 3D Acc, 3D Gyro, 3D Mag. | Full body | Healthy adults | Biomechanical model/Newton’s law. | 20 N | Calibration needed. The full body configuration allowed to estimate the three dimensional GRF. Good agreement observed between estimated and measured forces. |
| Kodama and Watanabe [76] | 2016 | Sit to stand, squat | 7 | 3D Acc. | Trunk, Pelvis, thigh, shank | Healthy adults | Biomechanical model/Newton’s law. | Vertical: 15 N Horizontal: 10 N | Estimated internal forces/moments, GRF and CoP. Good estimation of GRF. Main limitation due to statistics used to determine inertial properties of body segments. |
| Setuain et al. [80] | 2016 | Vertical jump | 1 | 3D Acc, 3D Gyro, 3D Mag. | Lumbar spine | Healthy adults | Newton’s Law of motion | 19% R = 0.93 | Identification of jump phases from velocity profile. Good correlation between acceleration and force platform, but disagreement between values. |
| Karatsidis et al. [45] | 2017 | walking | 17 | 3D Acc, 3D Gyro, 3D Mag. | Full Body | Healthy adults | Biomechanical model | 29.6% | Use of smooth transition function to determine GRF in double support. |
| Gurchiek et al. [56] | 2017 | Acceleration and change of direction | 1 | 3D Acc, 3D Gyro, 3D Mag. | Sacrum | Healthy adults | Newton’s law. | 182.92 N R = 0.53 | 3D GRF. Static calibration needed. Poor results for the lateral components of force. |
| Raper et al. [59] | 2018 | Running | 1 | 3D Acc. | Medial tibia | Professional Athletes | Newton’s law. | 16.04% | IMU underestimates the force, but good correlation with the direct measurement. |
| Aurbach et al. [60] | 2017 | Gait | 15 | 3D Acc, 3D Gyro, 3D Mag. | Full body | Healthy adults | AnyBody™ musculoskeletal model. | 15.60 ± 12.54% | GRF and ankle internal forces. |
| Guo et al. [87] | 2017 | Gait | 1 | 3D Acc. | L5, C7, Forehead | Healthy adults | Machine learning. | 5.0% | Membership function to identify GRF during double support. Good estimation of GRF. Gait phase identification was dependent on pressure insoles. L5 is the best placement. |
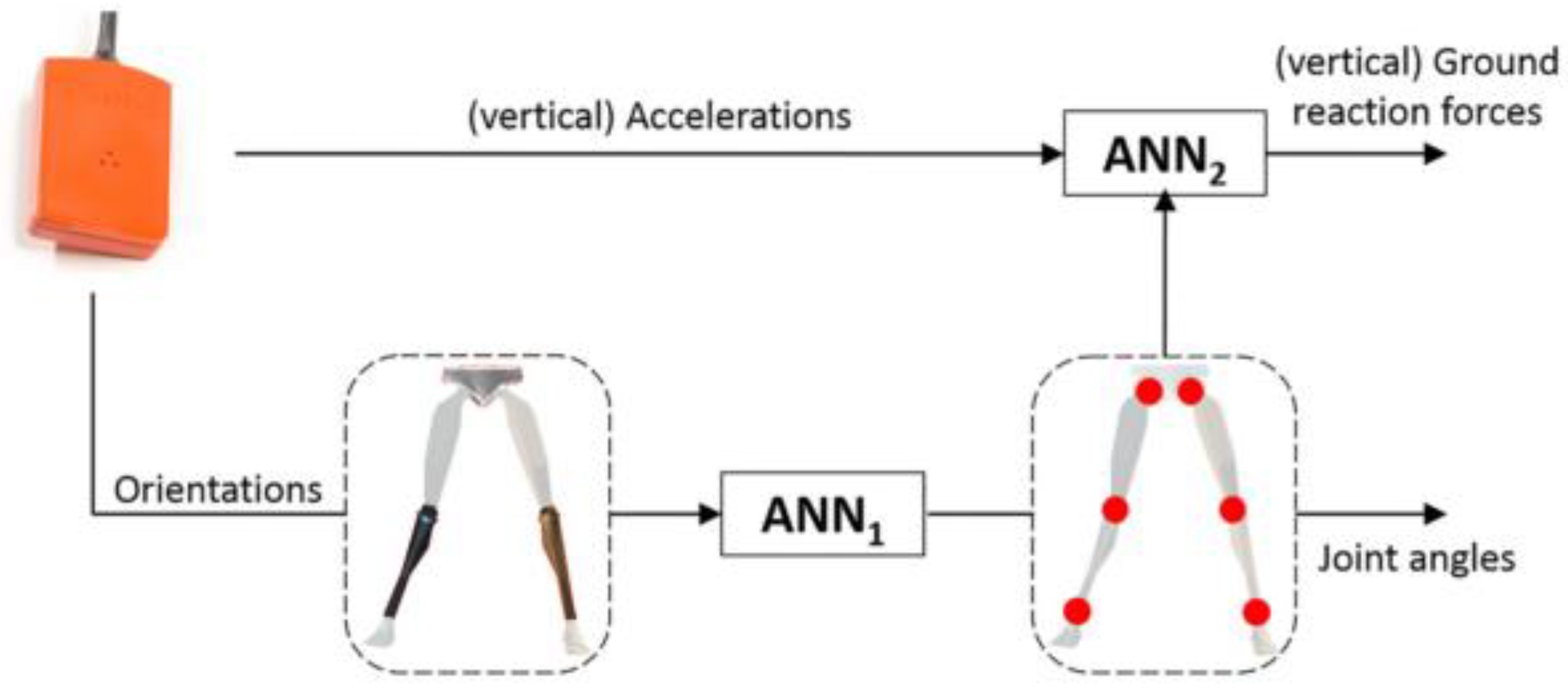
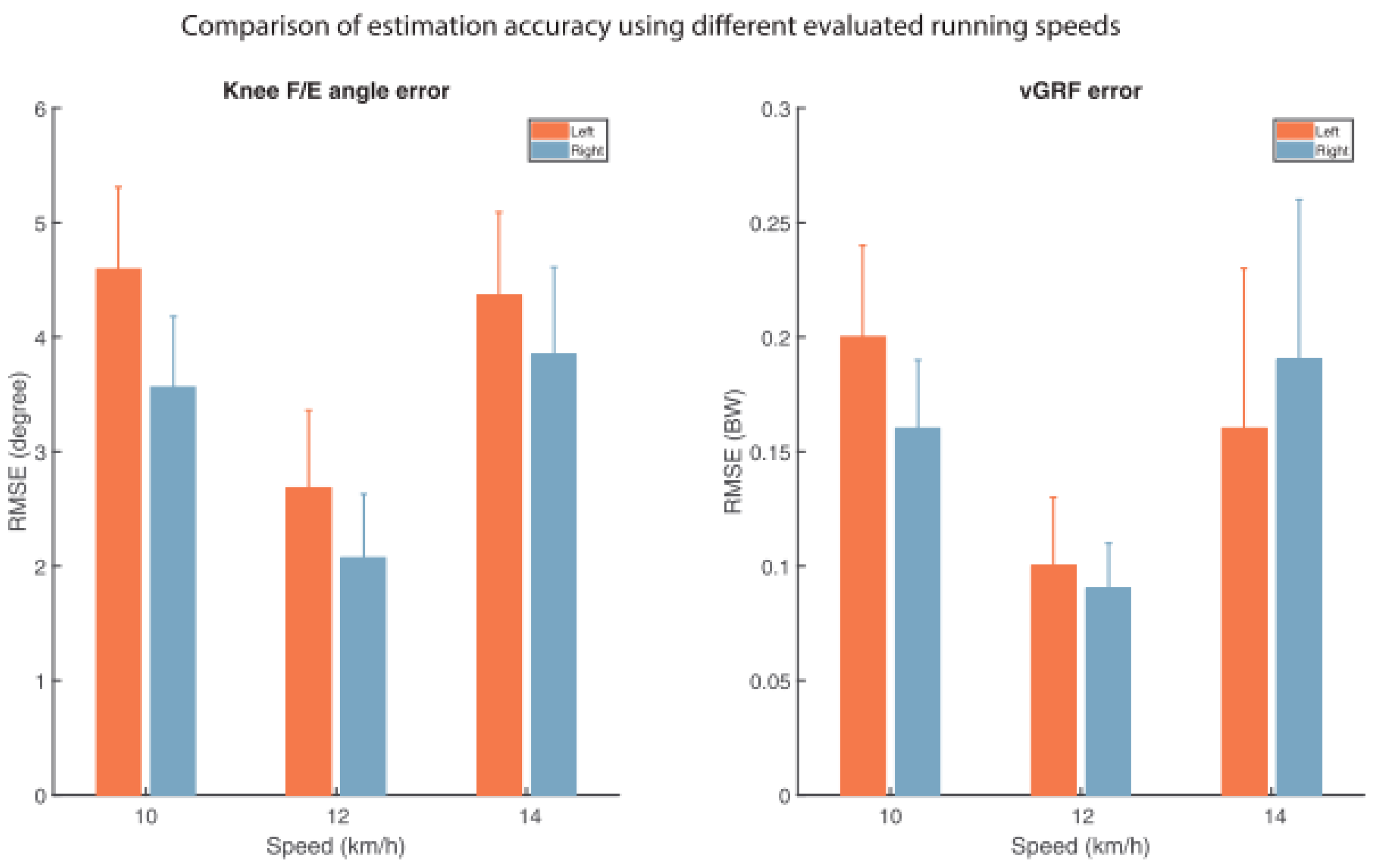
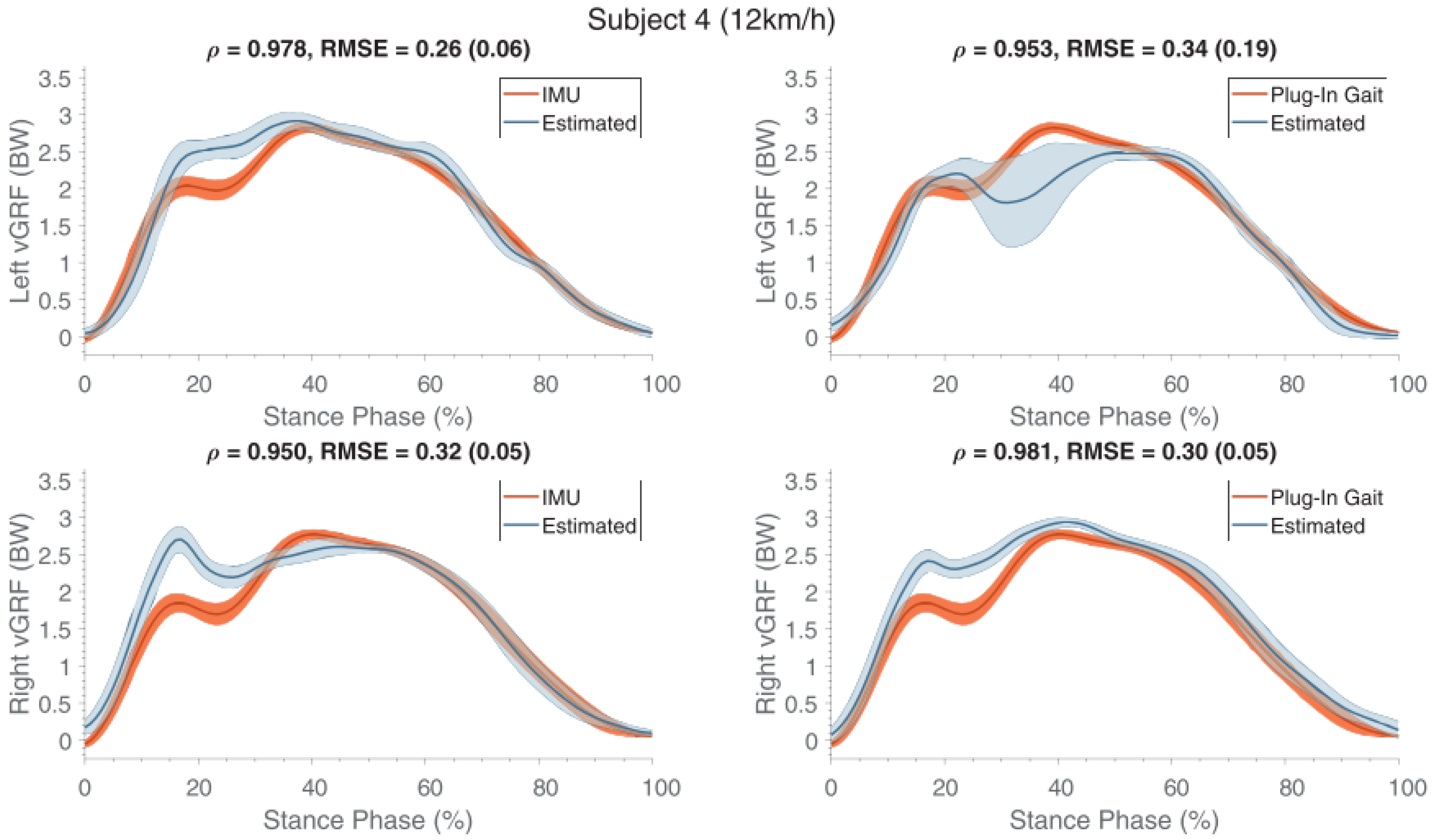
| Wouda et al. [89] | 2018 | Running | 3 | 3D Acc, 3D Gyro, 3D Mag. | Pelvis, shank. | Athletes/runners | Multi stage machine learning. | 0.27 BW | Minimal sensor setup. Only vertical GRF was estimated. Excellent results when using training data from the same subject. |
| Thiel et al. [62] | 2018 | Sprint running | 2 | 3D Acc, 3D Gyro, 3D Mag. | Shank | Athletes/sprinters | Linear modelling. Empirical parameter estimation. | 33.32% | Estimation of peak GRF by linear modelling. Method was not reliable for every participant. |
| Kiernan et al. [63] | 2018 | Running | 1 | 3D Acc. | Thigh | Athletes/runners | Statistical model/linear regression equation | N.A. | Estimation of peak GRF. Relation between peak GRF and potential injury. Evaluation of the training level. Use of the lateral component of acceleration to determine which foot is in contact with the ground. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ancillao, A.; Tedesco, S.; Barton, J.; O’Flynn, B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors 2018, 18, 2564. https://doi.org/10.3390/s18082564
Ancillao A, Tedesco S, Barton J, O’Flynn B. Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors. 2018; 18(8):2564. https://doi.org/10.3390/s18082564
Chicago/Turabian StyleAncillao, Andrea, Salvatore Tedesco, John Barton, and Brendan O’Flynn. 2018. "Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review" Sensors 18, no. 8: 2564. https://doi.org/10.3390/s18082564
APA StyleAncillao, A., Tedesco, S., Barton, J., & O’Flynn, B. (2018). Indirect Measurement of Ground Reaction Forces and Moments by Means of Wearable Inertial Sensors: A Systematic Review. Sensors, 18(8), 2564. https://doi.org/10.3390/s18082564