Constrained Multi-Sensor Control Using a Multi-Target MSE Bound and a δ-GLMB Filter

Abstract
1. Introduction
2. Problem Formulation
3. Multi-Sensor Multi-Target MSE Bound
4. Optimization for Constrained Multi-Sensor Control
5. Simulations
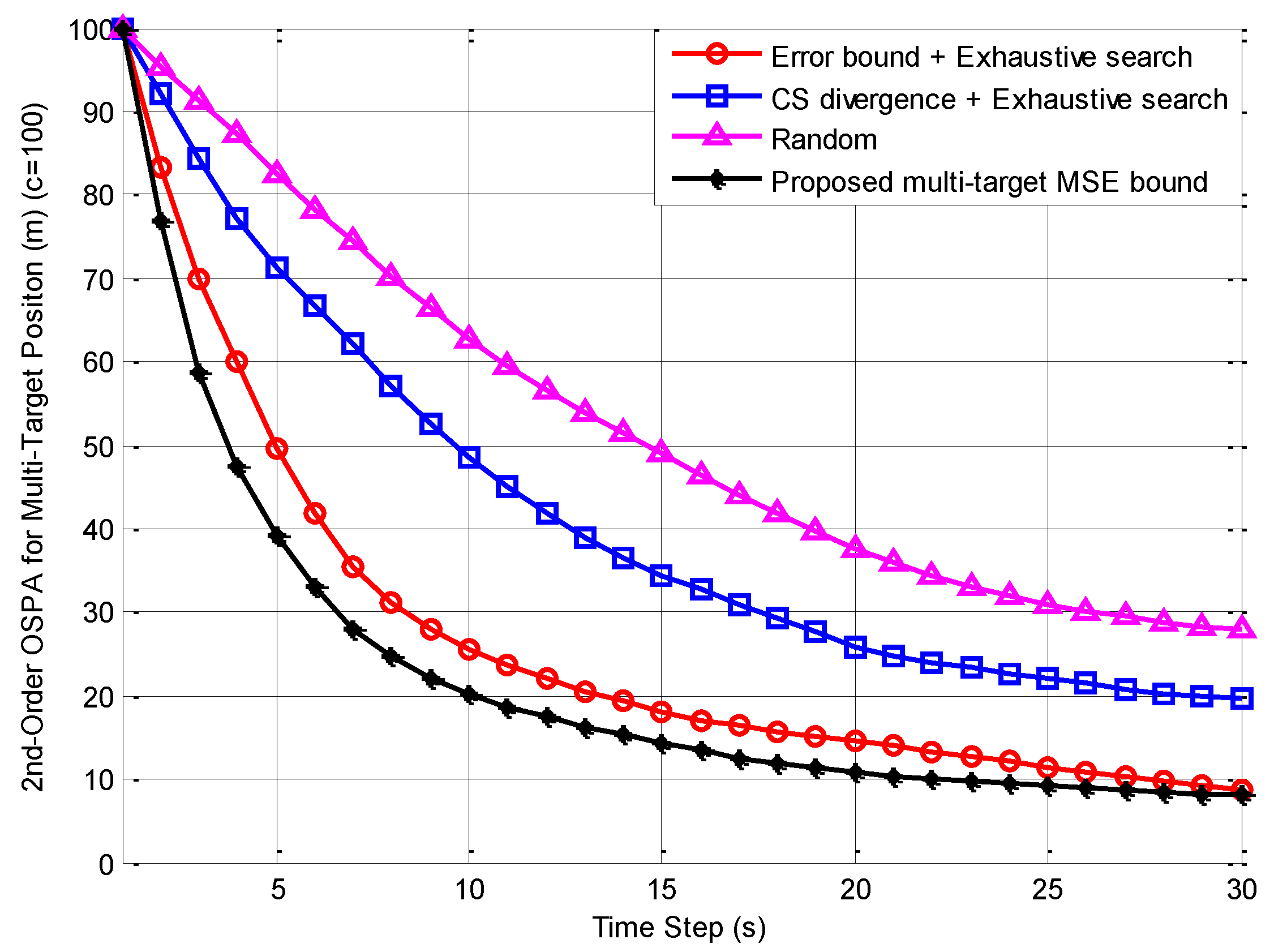
5.1. Example 1: Scenarios with a Small Number of Sensors
5.2. Example 2: Scenarios with a Large Number of Sensors
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Proof of Lemma 1
Appendix B. Proof of Theorem 1
References
- Bar-Shalom, Y.; Li, X.R. Multitarget-Multisensor Tracking: Principles and Techniques; YBS Publishing: Storrs, CT, USA, 1995. [Google Scholar]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House: Norwood, MA, USA, 1999. [Google Scholar]
- Tharmarasa, R.; Kirubarajan, T.; Hernandez, M.L.; Sinha, A. PCRLB-based multisensor array management for multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 539–555. [Google Scholar] [CrossRef]
- Tharmarasa, R.; Kirubarajan, T.; Sinha, A.; Lang, T. Decentralized sensor selection for large-scale multisensor-multitarget tracking. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1307–1324. [Google Scholar] [CrossRef]
- Mohammadi, A.; Asif, A. Decentralized computation of the conditional posterior Cramér-Rao lower bound: Application to adaptive sensor selection. In Proceedings of the 38th IEEE International Conference on Acoustics, Speech, and Signal Processing, Vancouver, BC, Canada, 26–30 May 2013; pp. 5278–5282. [Google Scholar]
- Herath, S.C.K.; Pathirana, P.N. Optimal sensor arrangements in angle of arrival (AoA) and range based localization with linear sensor arrays. Sensors 2013, 13, 12277–12294. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Shen, X.; Wang, P.; Zhu, Y. The Cramér-Rao bounds and sensor selection for nonlinear systems with uncertain observations. Sensors 2018, 18, 1103. [Google Scholar] [CrossRef] [PubMed]
- Mahler, R. Advances in Statistical Multisource-Multitarget Information Fusion; Artech House: Norwood, MA, USA, 2014. [Google Scholar]
- Vo, B.T.; Vo, B.N. Labeled random finite sets and multi-object conjugate priors. IEEE Trans. Signal Process. 2013, 61, 3460–3475. [Google Scholar] [CrossRef]
- Vo, B.N.; Vo, B.T.; Phung, D. Labeled random finite sets and the bayes multi-target tracking filter. IEEE Trans. Signal Process. 2014, 62, 6554–6567. [Google Scholar] [CrossRef]
- Reuter, S.; Vo, B.T.; Vo, B.N.; Dietmayer, K. The labeled multi-Bernoulli filter. IEEE Trans. Signal Process. 2014, 62, 3246–3260. [Google Scholar]
- Papi, F.; Vo, B.N.; Vo, B.T.; Fantacci, C.; Beard, M. Generalized labeled multi-Bernoulli approximation of multi-object densities. IEEE Trans. Signal Process. 2015, 63, 5487–5497. [Google Scholar] [CrossRef]
- Liu, C.; Sun, J.; Lei, P.; Qi, Y. δ-generalized labeled multi-Bernoulli filter using amplitude information of neighboring cells. Sensors 2018, 18, 1153. [Google Scholar]
- Williams, J.L. Marginal multi-Bernoulli filters: RFS derivation of MHT, JIPDA and association-based MeMBer. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1664–1687. [Google Scholar] [CrossRef]
- Xia, Y.X.; Granstrom, K.; Svensson, L.; Garcia-Fernandez, A.F. Performance evaluation of multi-Bernoulli conjugate priors for multi-target filtering. In Proceedings of the 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017; pp. 644–651. [Google Scholar]
- Zhang, Q.; Song, T.L. Improved bearings-only multi-target tracking with GM-PHD filtering. Sensors 2016, 16, 1469. [Google Scholar] [CrossRef] [PubMed]
- He, X.; Liu, G. Cardinality balanced multi-target multi-Bernoulli filter with error compensation. Sensors 2016, 16, 1399. [Google Scholar] [CrossRef] [PubMed]
- Si, W.; Wang, L.; Qu, Z. Multi-target tracking using an improved Gaussian mixture CPHD filter. Sensors 2016, 16, 1964. [Google Scholar] [CrossRef] [PubMed]
- Castanón, D.A.; Carin, L. Stochastic control theory for sensor management. In Foundations and Applications of Sensor Management; Hero, A.O., III, Castanón, D.A., Cochran, D., Kastella, K., Eds.; Springer: Boston, MA, USA, 2008; Chapter 2; pp. 7–32. [Google Scholar]
- Mahler, R.; Zajic, T. Probabilistic objective functions for sensor management. In Proceedings of the SPIE, Signal Processing, Sensor Fusion, and Target Recognition XIII, Orlando, FL, USA, 9 April 2004; Volume 5429, pp. 233–244. [Google Scholar]
- Hoang, H.G.; Vo, B.T. Sensor management for multi-target tracking via multi-Bernoulli filtering. Automatica 2014, 50, 1135–1142. [Google Scholar] [CrossRef]
- Gostar, A.K.; Hoseinnezhad, R.; Bab-Hadiashar, A. Multi-Bernoulli sensor control via minimization of expected estimation errors. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1762–1773. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.N. Sensor control for multi-object state-space estimation using random finite sets. Automatica 2010, 46, 1812–1818. [Google Scholar] [CrossRef]
- Ristic, B.; Vo, B.N.; Clark, D. A note on the reward function for PHD filters with sensor control. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1521–1529. [Google Scholar] [CrossRef]
- Beard, M.; Vo, B.T.; Vo, B.N.; Arulampalam, S. Sensor control for multi-target tracking using cauchy-schwarz divergence. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 937–944. [Google Scholar]
- Gostar, A.K.; Hoseinnezhad, R.; Rathnayake, T.; Wang, X.; Bab-Hadiashar, A. Constrained sensor control for labeled multi-Bernoulli filter using Cauchy-Schwarz divergence. IEEE Signal Process. Lett. 2017, 24, 1313–1317. [Google Scholar] [CrossRef]
- Jiang, M.; Yi, W.; Kong, L. Multi-sensor control for multi-target tracking using cauchy-schwarz divergence. In Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 2059–2066. [Google Scholar]
- Wang, X.; Hoseinnezhad, R.; Gostar, A.K.; Rathnayake, T.; Xu, B.; Bab-Hadiashar, A. Multi-sensor control for multi-object Bayes filters. Signal Process. 2018, 142, 260–270. [Google Scholar] [CrossRef]
- Mahler, R. Optimal/robust distributed data fusion: A unified approach. In Proceedings of the SPIE, Signal Processing, Sensor Fusion, and Target Recognition IX, Orlando, FL, USA, 4 April 2000; Volume 4052, pp. 128–138. [Google Scholar]
- Fantacci, C.; Vo, B.N.; Vo, B.T.; Battistelli, G.; Chisci, L. Consensus labeled random finite set filtering for distributed multi-object tracking. arXiv, 2015; arXiv:1501.01579. [Google Scholar]
- Wright, S.J. Coordinate descent algorithms. Math. Program. 2015, 151, 3–34. [Google Scholar] [CrossRef]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]
- Poor, V. An Introduction to Signal Detection and Estimation; Springer: New York, NY, USA, 1994. [Google Scholar]
- Zuo, L.; Niu, R.; Varshney, P.K. Conditional posterior Cramér-Rao lower bounds for nonlinear sequential Bayesian estimation. IEEE Trans. Signal Process. 2011, 59, 1–14. [Google Scholar] [CrossRef]
- Luenberger, D.G.; Ye, Y. Linear and Nonlinear Programming, 4th ed.; Springer: New York, NY, USA, 2015. [Google Scholar]
- Krus, P.; Andersson, J. Optimizing optimization for design optimization. In Proceedings of the ASME Design Automation Conference, Chicago, IL, USA, 2–6 September 2003; pp. 951–960. [Google Scholar]
- Davis, P.J.; Rabinowitz, P.; Rheinbolt, W. Methods of Numerical Integration, 2nd ed.; Dover Publications: Mineola, NY, USA, 2007. [Google Scholar]
- Mishra, M.; Gupta, N.; Dubey, A.; Shekhar, S. Application of quasi Monte Carlo integration technique in efficient capacitance computation. Prog. Electromagn. Res. 2009, 90, 309–322. [Google Scholar] [CrossRef]
- Krus, P.; Ölvander, J. Performance index and meta-optimization of a direct search optimization method. Eng. Optim. 2013, 45, 1167–1185. [Google Scholar] [CrossRef]
- Li, X.R.; Jilkov, V.P. Survey of maneuvering target tracking, part V: Multiple-model methods. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1255–1321. [Google Scholar]
- Arulampalam, S.; Maskell, S.; Gordon, N.J.; Clapp, T. A tutorial on particle filters for on-line non-linear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef]
- Kurien, T. Issues in the design of practical multitarget tracking algorithms. In Multitarget-Multisensor Tracking: Advanced Applications; Bar-Shalom, Y., Ed.; Artech-House: Norwood, MA, USA, 1990; pp. 43–83. [Google Scholar]
- Rahmathullah, A.S.; Garcia-Fernandez, A.F.; Svensson, L. Generalized optimal sub-pattern assignment metric. In Proceedings of the 20th International Conference on Information Fusion, Xi’an, China, 10–13 July 2017; pp. 182–189. [Google Scholar]
- Guerriero, M.; Svensson, L.; Svensson, D.; Willett, P. Shooting two birds with two bullets: How to find Minimum Mean OSPA estimates. In Proceedings of the 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010; pp. 1–8. [Google Scholar]
- Crouse, D.F.; Willett, P.; Guerriero, M.; Svensson, L. An approximate Minimum MOSPA estimator. In Proceedings of the 36th IEEE International Conference on Acoustics, Speech, and Signal Processing, Prague, Czech Republic, 22–27 May 2011; pp. 3644–3647. [Google Scholar]
- Crouse, D.F.; Willett, P.; Bar-Shalom, Y.; Svensson, L. CS versus MAP and MMOSPA for multi-target radar AOAs. In Proceedings of the Asilomar Conference on Signals, Systems, and Computers, Asilomar, CA, USA, 7–10 November 2011; pp. 1484–1490. [Google Scholar]
- Baum, M.; Willett, P.; Hanebeck, U.D. MMOSPA-based track extraction in the PHD filter—A justification for k-means clustering. In Proceedings of the 53rd IEEE Conference on Decision and Control, Los Angeles, CA, USA, 15–17 December 2014; pp. 1816–1821. [Google Scholar]
- Baum, M.; Willett, P. MMOSPA-based direction-of-arrival tracking with a passive sonar array—An experimental study. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 1382–1387. [Google Scholar]
- Baum, M.; Willett, P.; Hanebeck, U.D. On Wasserstein Barycenters and MMOSPA estimation. IEEE Signal Process. Lett. 2015, 22, 1511–1515. [Google Scholar] [CrossRef]
- Baum, M.; Willett, P.; Hanebeck, U.D. Polynomial-time algorithms for the exact MMOSPA estimate of a multi-object probability density represented by particles. Trans. Signal Process. 2015, 63, 2476–2484. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
|
|
|
| Scenarios | s = 4, E = 100 J | s = 8, E = 200 J | s = 12, E = 300 J | s = 16, E = 400 J | s = 20, E = 500 J | |
|---|---|---|---|---|---|---|
| Control Algorithms | ||||||
| CS divergence with exhaustive search | 19.5 m | 13.9 m | 9.2 m | 5.8 m | 4.6 m | |
| Error bound with exhaustive search | 8.7 m | 6.0 m | 4.6 m | 3.9 m | 3.6 m | |
| Error bound with MPF | 8.9 m | 6.3m | 5.1 m | 4.5 m | 4.1 m | |
| Error bound with complex | 9.0 m | 6.4 m | 5.1 m | 4.4 m | 4.0 m | |
| Multi-target MSE bound | 8.0 m | 5.4 m | 4.1 m | 3.5 m | 3.2 m | |
| Scenarios | s = 4, E = 100 J | s = 8, E = 200 J | s = 12, E = 300 J | s = 16, E = 400 J | s = 20, E = 500 J | |
|---|---|---|---|---|---|---|
| Control Algorithms | ||||||
| CS divergence with exhaustive search | 22 s | 153 s | 1062 s | 7259 s | 50973 s | |
| Error bound with exhaustive search | 23 s | 162 s | 1128 s | 7698 s | 53168 s | |
| Error bound with MPF | 20 s | 91 s | 204 s | 365 s | 578 s | |
| Error bound with complex | 16 s | 81 s | 206 s | 573 s | 1296 s | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, F.; Hou, L.; Liu, J.; Han, C. Constrained Multi-Sensor Control Using a Multi-Target MSE Bound and a δ-GLMB Filter. Sensors 2018, 18, 2308. https://doi.org/10.3390/s18072308
Lian F, Hou L, Liu J, Han C. Constrained Multi-Sensor Control Using a Multi-Target MSE Bound and a δ-GLMB Filter. Sensors. 2018; 18(7):2308. https://doi.org/10.3390/s18072308
Chicago/Turabian StyleLian, Feng, Liming Hou, Jing Liu, and Chongzhao Han. 2018. "Constrained Multi-Sensor Control Using a Multi-Target MSE Bound and a δ-GLMB Filter" Sensors 18, no. 7: 2308. https://doi.org/10.3390/s18072308
APA StyleLian, F., Hou, L., Liu, J., & Han, C. (2018). Constrained Multi-Sensor Control Using a Multi-Target MSE Bound and a δ-GLMB Filter. Sensors, 18(7), 2308. https://doi.org/10.3390/s18072308