LifeChair: A Conductive Fabric Sensor-Based Smart Cushion for Actively Shaping Sitting Posture


Abstract
1. Introduction
- The development of a pressure sensing system for embedded implementation on simple and complex surfaces. It is comprised primarily of conductive fabrics which are designed and arranged based on human biomechanics. This sensing system focuses on manufacturability, customisation and adaptibility.
- A smart cushion interface for the backrest of a chair which has not been thoroughly explored. The benefits of the LifeChair cushion interface allow it to be a more flexible, adaptive and portable approach for posture correction than previous methods which attach sensors directly onto the chair backrest, underneath the chair, on the user’s seat or on the user themselves.
- A posture classification model which can detect up to 11 postures based on the time series input of data from the pressure sensing system. The model was designed and verified based on training data and experiments from our previous studies.
- We have developed a dedicated and sophisticated LifeChair smartphone application, and as a result, extensive testing and improvements have been included to ensure it is accurate and robust enough for real world use. Previous works have mainly opted for restrictive wired connections [18].
1.1. Sensing Sitting Posture
1.2. Conductive Fabric Sensing Technology
1.3. Posture Training Interfaces
1.4. Designing Vibrotactile Feedback
2. Materials and Methods
2.1. Pressure Sensing Surface: Design and Methodology
2.1.1. Design Requirements
- primarily consist of conductive fabric for flexibility and adaptivness;
- be sensitive to a range of small to large human forces;
- be manufacturable and cost-effective for commercial implementation;
- have a biomechanics-based design to accommodate for various users;
- be comfortable and compliant for humans; and
- have consistency over large sensor diameters (10 cm).
2.1.2. Materials Compositions
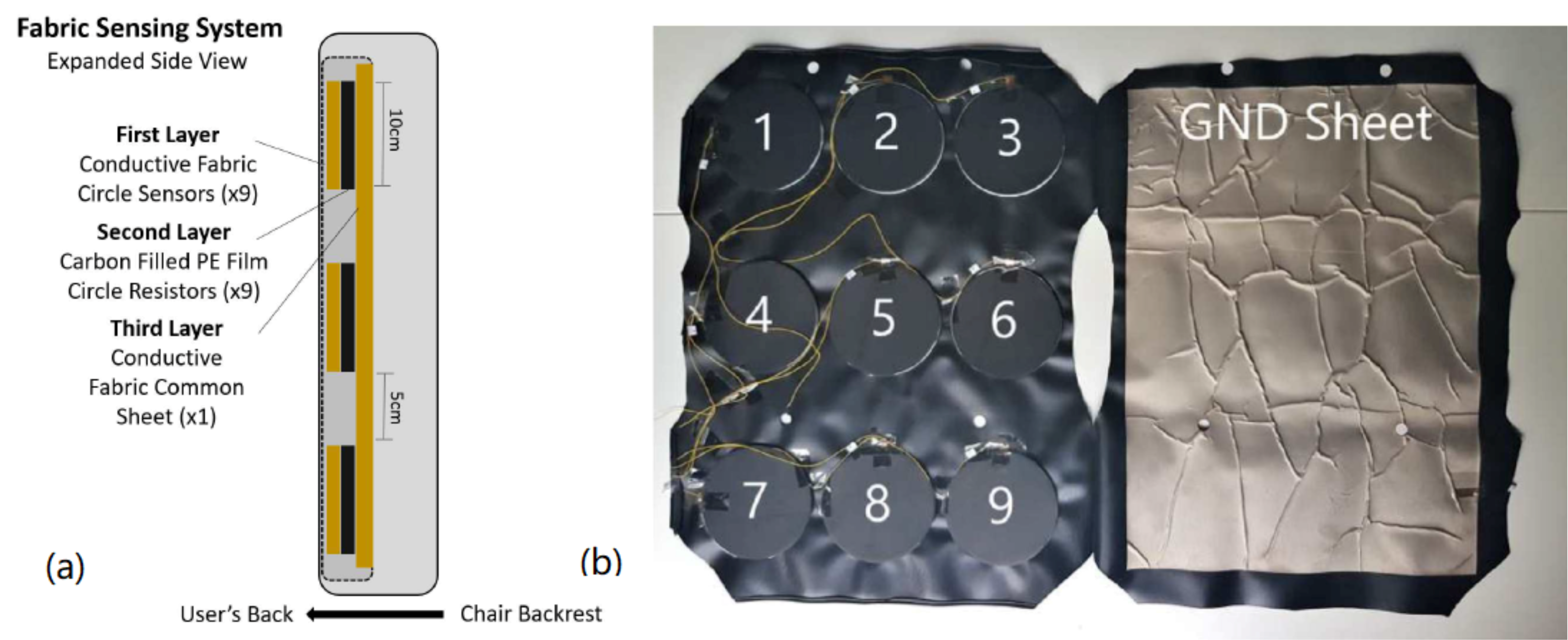
- The first layer is composed of single sided plain weaved conductive cloth and houses the individual nine circular sensors. The conductive fabric material used in this sensing mat is 0.08 mm thick and is a mixture of nickel, copper and polyester which is woven into the fabric and supported by an acrylic adhesive. The surface resistivity of the fabric is <0.05 Ω/sq. The conductive cloth itself is structured in 3 layers which contain the conductive cloth, conductive acrylic adhesive and releasing paper. Each fabric circle sensor is 10 cm in diameter based on our pilot studies and anthropomorphic design. Each sensor contains a piece of copper tape which has a wire soldered to it and is then connected to the respective pin on the PCB multiplexer. The length of each wire is dependent on the distance of each sensor to the PCB connection point. The conductive side faces towards the chair’s backside to allow it to interface with the conductive and resistive sensor layers.
- The second layer is a 0.13 mm thick carbon filled polyethylene (PE) conductive film cut into 10 cm circles with <500 Ω/sq resistance. The conductive film is cut into 10 cm diameter circles to cover the surface area of the individual sensors but allow it to stay isolated from the neighbouring fabric sensors. Each conductive film circle behaves as a variable resistive layer for the respective circular sensor it is attached to. When force is applied, the resistance across the film drops and more current is allowed to pass through the conductive fabric layers.
- The third layer (closest to backrest of the chair) is a sheet of rectangular conductive fabric that is composed of the same material as the individual sensors in the first layer. The fabric sheet is 38 cm in width and 50 cm in height and behaves as the common ground plane for the sensing system. It covers the surface area of all 9 circular sensors. There is a piece of copper tape attached to the edge of the conductive sheet closest to the PCB connection point. A wire is soldered to the copper tape and then connected to the GROUND pin on the PCB. The conductive side faces towards the user so that it can interface with the other conductive and resistive layers in the sensor array.
2.1.3. Sensors Circuit Design
2.1.4. Human Biomechanics-Based Sensor Arrangement
2.2. System Overview
2.2.1. Outline of Components
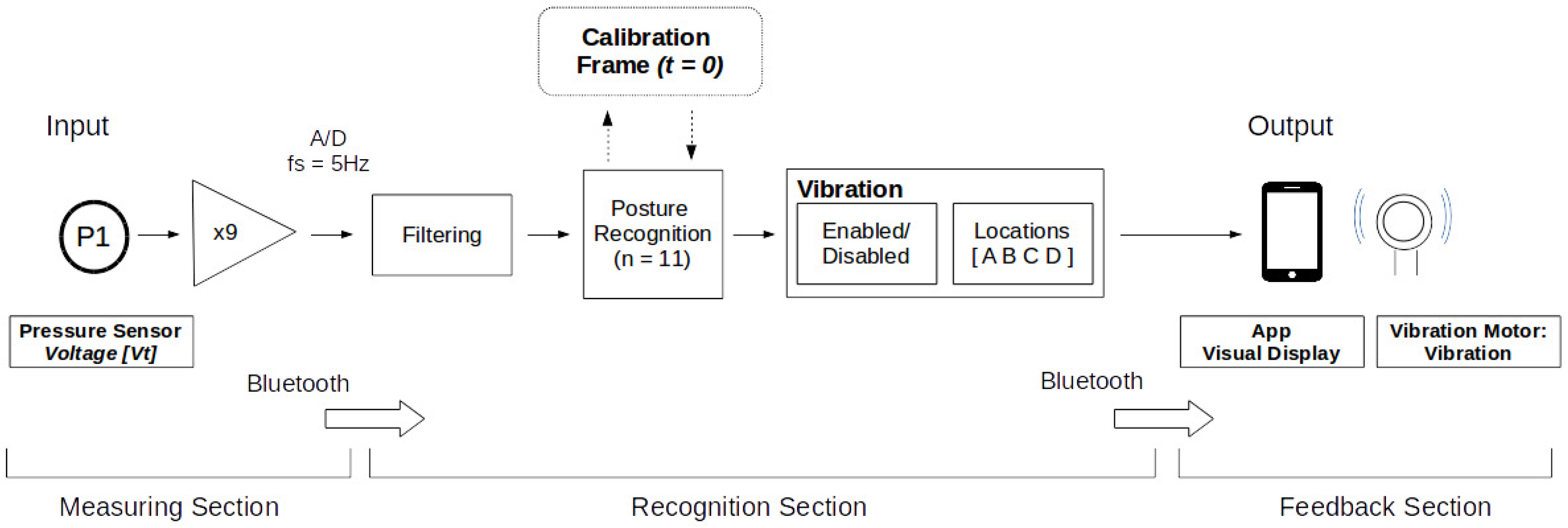
2.2.2. Data Flow Protocol
2.2.3. Posture Classification and Feedback
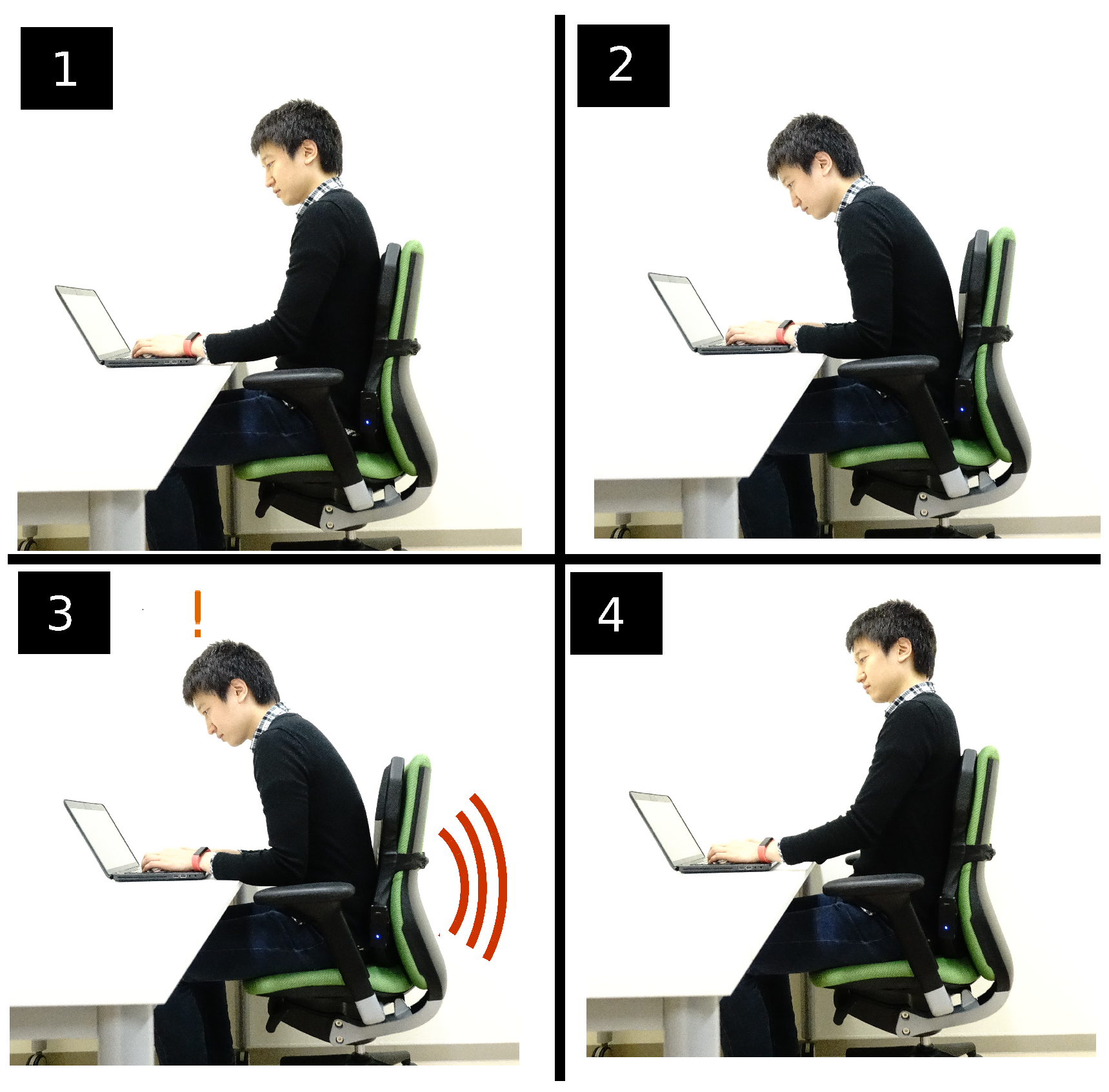
2.2.4. Haptic Function Design
3. Results and Discussion
3.1. Experiments
3.1.1. Experimental Overview
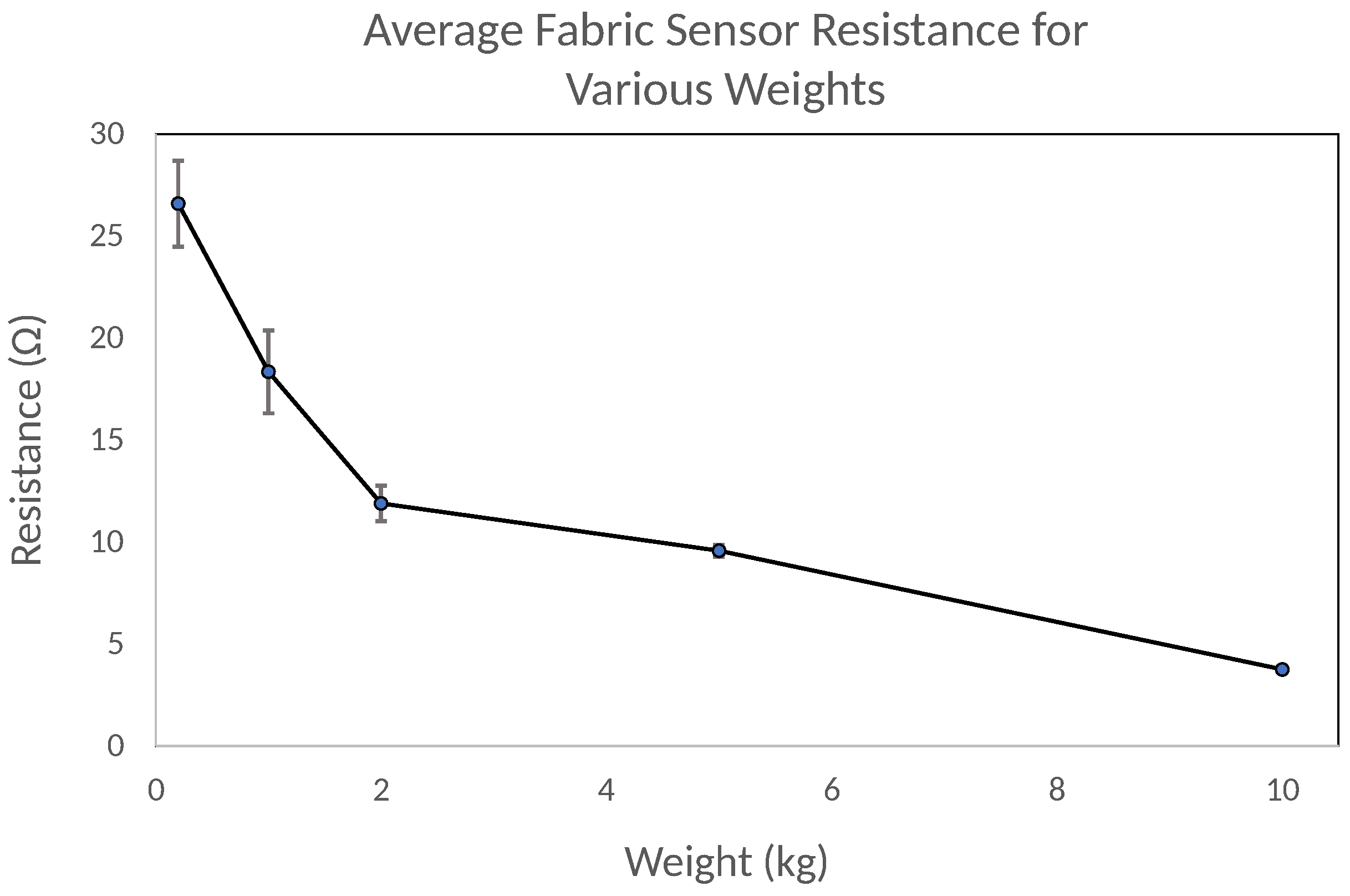
3.1.2. Experiment I: Pressure Sensor Array Feasibility Study
3.1.3. Experiment II: Posture Classification Accuracy
3.1.4. Experiment III: Vibrotactile Feedback Effect on Posture
3.2. Discussion
3.2.1. Conductive Fabric Sensing System Evaluation
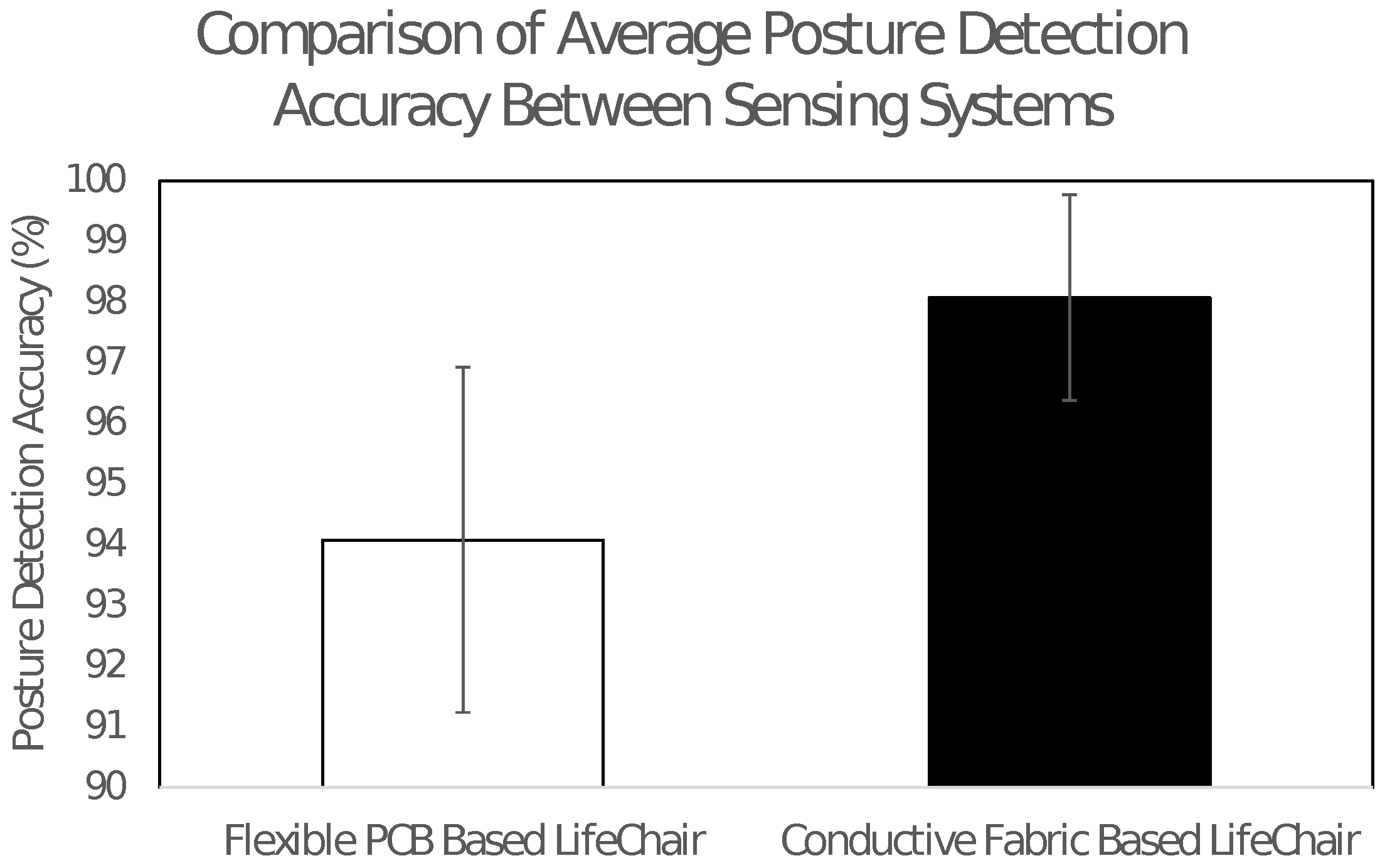
3.2.2. Comparison of the Average Classification Accuracy for Sitting Posture Detection
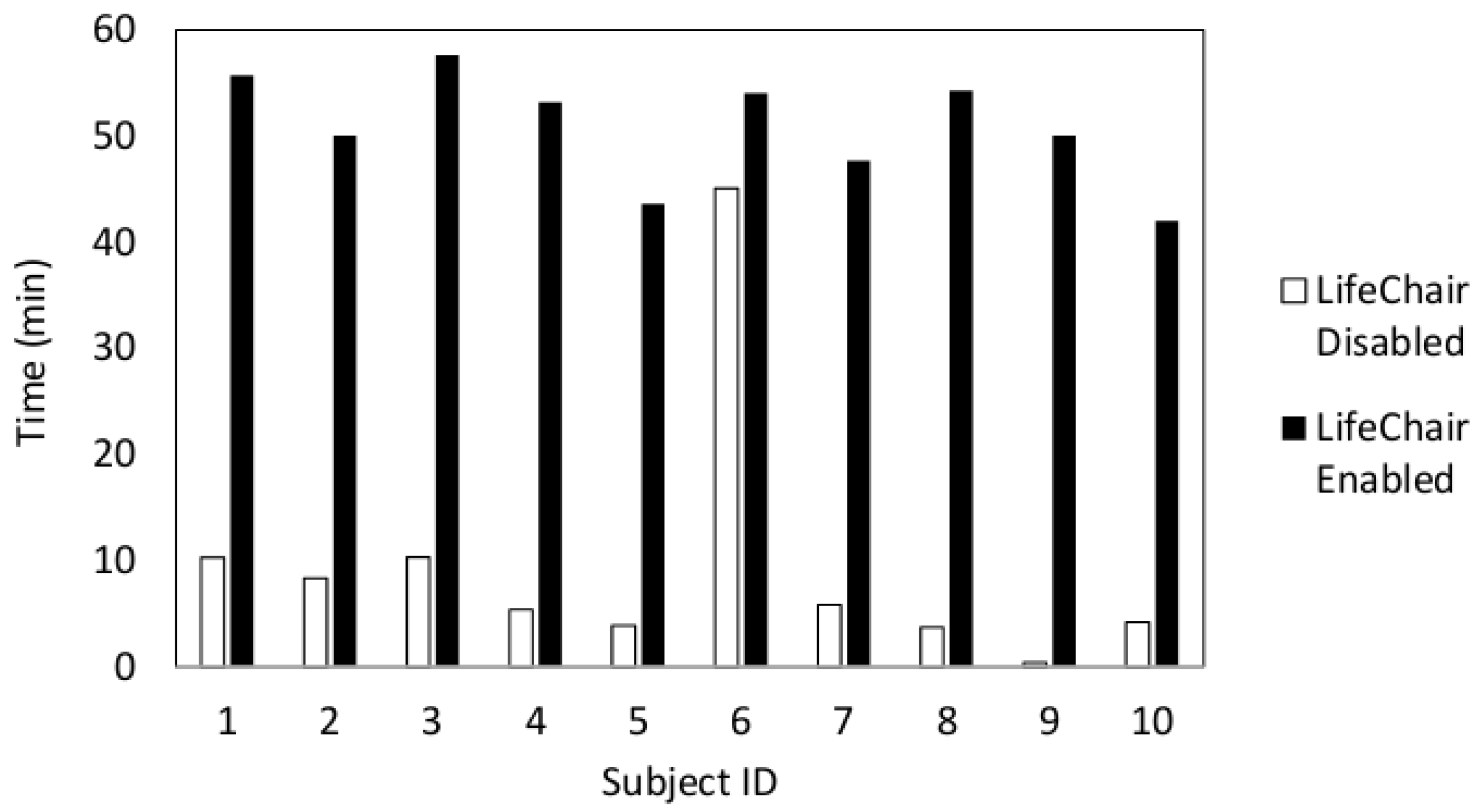
3.2.3. Vibrotactile Feedback Effect on Posture
3.2.4. System Evaluation
3.2.5. System Limitations
4. Conclusions
5. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Biswas, A.; Oh, P.I.; Faulkner, G.E.; Bajaj, R.R.; Silver, M.A.; Mitchell, M.S.; Alter, D.A. Sedentary time and its association with risk for disease incidence, mortality, and hospitalization in adultsa systematic review and meta-analysissedentary time and disease incidence, mortality, and hospitalization. Ann. Int. Med. 2015, 162, 123–132. [Google Scholar] [CrossRef] [PubMed]
- Lis, A.M.; Black, K.M.; Korn, H.; Nordin, M. Association between sitting and occupational LBP. Eur. Spine J. 2007, 16, 283–298. [Google Scholar] [CrossRef] [PubMed]
- Veerman, J.L.; Healy, G.N.; Cobiac, L.J.; Vos, T.; Winkler, E.A.; Owen, N.; Dunstan, D.W. Television viewing time and reduced life expectancy: A life table analysis. Br. J. Sports Med. 2012, 46, 927–930. [Google Scholar] [CrossRef] [PubMed]
- Helander, M.G.; Zhang, L. Field studies of comfort and discomfort in sitting. Ergonomics 1997, 40, 895–915. [Google Scholar] [CrossRef] [PubMed]
- Owen, N.; Healy, G.N.; Matthews, C.E.; Dunstan, D.W. Too much sitting: the population-health science of sedentary behavior. Exerc. Sport Sci. Rev. 2010, 38, 105. [Google Scholar] [CrossRef] [PubMed]
- Matthews, C.E.; George, S.M.; Moore, S.C.; Bowles, H.R.; Blair, A.; Park, Y.; Troiano, R.P.; Hollenbeck, A.; Schatzkin, A. Amount of time spent in sedentary behaviors and cause-specific mortality in US adults. Am. J. Clin. Nutr. 2012, 95, 437–445. [Google Scholar] [CrossRef] [PubMed]
- American Physical Therapy Association. The Secret of Good Posture: A Physical Therapist’s Perspective; American Physical Therapy Association: Alexandria, VA, USA, 1985. [Google Scholar]
- Nair, S.; Sagar, M.; Sollers, J., III; Consedine, N.; Broadbent, E. Do slumped and upright postures affect stress responses? A randomized trial. Health Psychol. 2015, 34, 632. [Google Scholar] [CrossRef] [PubMed]
- Karakolis, T.; Callaghan, J.P. The impact of sit-stand office workstations on worker discomfort and productivity: A review. Appl. Ergon. 2014, 45, 799–806. [Google Scholar] [CrossRef] [PubMed]
- Ishac, K.; Suzuki, K. A smart cushion system with vibrotactile feedback for active posture correction. In Proceedings of the International AsiaHaptics Conference, Kashiwanoha, Japan, 29 November–1 December 2016. [Google Scholar]
- Lokavee, S.; Puntheeranurak, T.; Kerdcharoen, T.; Watthanwisuth, N.; Tuantranont, A. Sensor pillow and bed sheet system: Unconstrained monitoring of respiration rate and posture movements during sleep. In Proceedings of the 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Seoul, Korea, 14–17 October 2012. [Google Scholar]
- Ahn, S.; Jeong, Y.; Kim, D.; Kim, H. Development of the non-wearable system with FSR sensors for correction of sitting position. In Proceedings of the 2015 Second International Conference on Computing Technology and Information Management (ICCTIM), Johor, Malaysia, 21–23 April 2015. [Google Scholar]
- Schofield, J.S.; Evans, K.R.; Hebert, J.S.; Marasco, P.D.; Carey, J.P. The effect of biomechanical variables on force sensitive resistor error: Implications for calibration and improved accuracy. J. Biomech. 2016, 49, 786–792. [Google Scholar] [CrossRef] [PubMed]
- Fernández-García, R.; Gil, I.; Cano, F.; Parés, F. Crosstalk characterization of fabrics elaborated with conductive yarns. In Proceedings of the 2016 International Symposium on Electromagnetic Compatibility- EMC EUROPE, Wroclaw, Poland, 5–9 September 2016. [Google Scholar]
- Day, N.; Penaloza, J.; Santos, V.J.; Killpack, M.D. Scalable fabric tactile sensor arrays for soft bodies. J. Micromech. Microeng. 2018, 28, 064004. [Google Scholar] [CrossRef]
- Shu, L.; Hua, T.; Wang, Y.; Li, Q.; Feng, D.D.; Tao, X. In-shoe plantar pressure measurement and analysis system based on fabric pressure sensing array. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 767–775. [Google Scholar] [PubMed]
- Chen, D.; Cai, Y.; Huang, M.C. Customizable Pressure Sensor Array: Design and Evaluation. IEEE Sens. J. 2018. [Google Scholar] [CrossRef]
- Zheng, Y.; Morrell, J.B. A vibrotactile feedback approach to posture guidance. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010. [Google Scholar]
- Samiei-Zonouz, R.; Memarzadeh-Tehran, H.; Rahmani, R. Smartphone-centric human posture monitoring system. In Proceedings of the 2014 IEEE Canada International Humanitarian Technology Conference-(IHTC), Montreal, QC, Canada, 1–4 June 2014. [Google Scholar]
- Lee, H.; Choi, Y.S.; Lee, S.; Shim, E. Smart pose: Mobile posture-aware system for lowering physical health risk of smartphone users. In CHI’13 Extended Abstracts on Human Factors in Computing Systems; ACM: New York, NY, USA, 2013. [Google Scholar]
- Kamiya, K.; Kudo, M.; Nonaka, H.; Toyama, J. Sitting posture analysis by pressure sensors. In Proceedings of the 19th International Conference on Pattern Recognition, Tampa, FL, USA, 8–11 December 2008. [Google Scholar]
- Haller, M.; Richter, C.; Brandl, P.; Gross, S.; Schossleitner, G.; Schrempf, A.; Nii, H.; Sugimoto, M.; Inami, M. Finding the right way for interrupting people improving their sitting posture. In Proceedings of the Human-Computer Interaction-INTERACT, Lisbon, Portugal, 5–9 September 2011; pp. 1–17. [Google Scholar]
- Lee, J.; Cho, E.; Kim, M.; Yoon, Y.; Choi, S. PreventFHP: Detection and warning system for Forward Head Posture. In Proceedings of the Haptics Symposium (HAPTICS), Houston, TX, USA, 23–26 February 2014. [Google Scholar]
- Skach, S.; Healey, P.G.; Stewart, R. Talking Through Your Arse: Sensing Conversation with Seat Covers. In Proceedings of the 39th Annual Meeting of the Cognitive Science Society (CogSci 2017), London, UK, 26–29 July 2017. [Google Scholar]
- Zhou, Y.; He, J.; Wang, H.; Qi, K.; Nan, N.; You, X.; Shao, W.; Wang, L.; Ding, B.; Cui, S. Highly sensitive, self-powered and wearable electronic skin based on pressure-sensitive nanofiber woven fabric sensor. Sci. Rep. 2017, 7, 12949. [Google Scholar] [CrossRef] [PubMed]
- Haghdoost, F.; Mottaghitalab, V.; Haghi, A.K. Comfortable textile-based electrode for wearable electrocardiogram. Sens. Rev. 2015, 35, 20–29. [Google Scholar] [CrossRef]
- Takamatsu, S.; Yamashita, T.; Imai, T.; Itoh, T. Lightweight flexible keyboard with a conductive polymer-based touch sensor fabric. Sens. Actuators A Phys. 2014, 220, 153–158. [Google Scholar] [CrossRef]
- Zhou, B.; Cheng, J.; Sundholm, M.; Reiss, A.; Huang, W.; Amft, O.; Lukowicz, P. Smart table surface: A novel approach to pervasive dining monitoring. In Proceedings of the 2015 IEEE International Conference on Pervasive Computing and Communications (PerCom), St. Louis, MO, USA, 23–27 March 2015. [Google Scholar]
- Liang, G.; Cao, J.; Liu, X.; Han, X. Cushionware: A practical sitting posture-based interaction system. In CHI’14 Extended Abstracts on Human Factors in Computing Systems; ACM: New York, NY, USA, 2014. [Google Scholar]
- Xu, W.; Huang, M.C.; Amini, N.; He, L.; Sarrafzadeh, M. Ecushion: A textile pressure sensor array design and calibration for sitting posture analysis. IEEE Sensors J. 2013, 13, 3926–3934. [Google Scholar] [CrossRef]
- Gold, J.E.; Driban, J.B.; Thomas, N.; Chakravarty, T.; Channell, V.; Komaroff, E.G. Postures, typing strategies, and gender differences in mobile device usage: An observational study. Appl. Ergon. 2012, 43, 408–412. [Google Scholar] [CrossRef] [PubMed]
- Szeto, G.P.; Straker, L.; Raine, S. A field comparison of neck and shoulder postures in symptomatic and asymptomatic office workers. Appl. Ergon. 2002, 33, 75–84. [Google Scholar] [CrossRef]
- Matsuda, Y.; Hasegaway, T.; Arai, I.; Arakawa, Y.; Yasumoto, K. Waistonbelt 2: A belt-type wearable device for monitoring abdominal circumference, posture and activity. In Proceedings of the 2016 Ninth International Conference on Mobile Computing and Ubiquitous Networking (ICMU), Kaiserslautern, Germany, 4–6 October 2016. [Google Scholar]
- Stronks, H.C.; Parker, D.J.; Barnes, N. Vibrotactile spatial acuity and intensity discrimination on the lower back using coin motors. IEEE Trans. Haptics 2016, 9, 446–454. [Google Scholar] [CrossRef] [PubMed]
- Jones, L.A.; Kunkel, J.; Piateski, E. Vibrotactile pattern recognition on the arm and back. Perception 2009, 38, 52–68. [Google Scholar] [CrossRef] [PubMed]
- Stronks, H.C.; Parker, D.J.; Barnes, N.M. Tactile acuity determined with vibration motors for use in a sensory substitution device for the blind. Investig. Ophthalmol. Vis. Sci. 2015, 56, 2920. [Google Scholar]
- Alahakone, A.U.; Senanayake, S.A. Vibrotactile feedback systems: Current trends in rehabilitation, sports and information display. In Proceedings of the 2009 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009. [Google Scholar]
- Zheng, Y.; Morrell, J.B. Haptic actuator design parameters that influence affect and attention. In Proceedings of the 2012 IEEE Haptics Symposium (HAPTICS), Vancouver, BC, Canada, 4–7 March 2012. [Google Scholar]
- Riley, B. Formula Sae Anthropometric Reference Data 5th Percentile Female & 95th Percentile Male. 2015. Available online: https://www.fsaeonline.com/content/FSAE%20Rules95th_2016.pdf (accessed on 24 April 2016).
- Teng, L.; Jeronimo, K.; Wei, T.; Nemitz, M.P.; Lyu, G.; Stokes, A.A. Integrating soft sensor systems using conductive thread. J. Micromech. Microeng. 2018, 28, 054001. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vibration Pattern | Action Suggested | |||
|---|---|---|---|---|
| 1 | No User | No Activation | Sit Down | |
| 2 | Sitting Upright | No Activation | Maintain Upright Posture | |
| 3 | Upper Back No Contact | C and D | Sit Back in Upright Posture | |
| 3 | Lower Back No Contact | A and B | Pull back Lower Back | |
| 4 | Slouching Forward | C and D | Sit Back in Upright Posture | |
| 5 | User Slouching Right | A and C | Pull back left side of body | |
| 5 | User Slouching Left | B and D | Pull back right side of body | |
| 6 | Right Shoulder No Contact | B | Pull back right shoulder | |
| 6 | Left Shoulder No Contact | A | Pull back left shoulder | |
| 6 | Right Lumbar No Contact | D | Pull back right lumbar | |
| 6 | Left Lumbar No Contact | C | Pull back left lumbar |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ishac, K.; Suzuki, K. LifeChair: A Conductive Fabric Sensor-Based Smart Cushion for Actively Shaping Sitting Posture. Sensors 2018, 18, 2261. https://doi.org/10.3390/s18072261
Ishac K, Suzuki K. LifeChair: A Conductive Fabric Sensor-Based Smart Cushion for Actively Shaping Sitting Posture. Sensors. 2018; 18(7):2261. https://doi.org/10.3390/s18072261
Chicago/Turabian StyleIshac, Karlos, and Kenji Suzuki. 2018. "LifeChair: A Conductive Fabric Sensor-Based Smart Cushion for Actively Shaping Sitting Posture" Sensors 18, no. 7: 2261. https://doi.org/10.3390/s18072261
APA StyleIshac, K., & Suzuki, K. (2018). LifeChair: A Conductive Fabric Sensor-Based Smart Cushion for Actively Shaping Sitting Posture. Sensors, 18(7), 2261. https://doi.org/10.3390/s18072261