A Review of PZT Patches Applications in Submerged Systems



Abstract
1. Introduction
2. Constitutive Equations of Generic PZT Transducers
3. Applications of PZT Patches in Submerged Systems
3.1. Modal Analysis of Submerged Structures
3.2. Active Vibration Control (AVC) of Submerged Structures
3.3. Sound Cancellation of Submerged Systems
3.4. Atomic Force Microscope (AFM) in Physiological Mediums
3.5. Energy Harvesting
4. Concluding Remarks
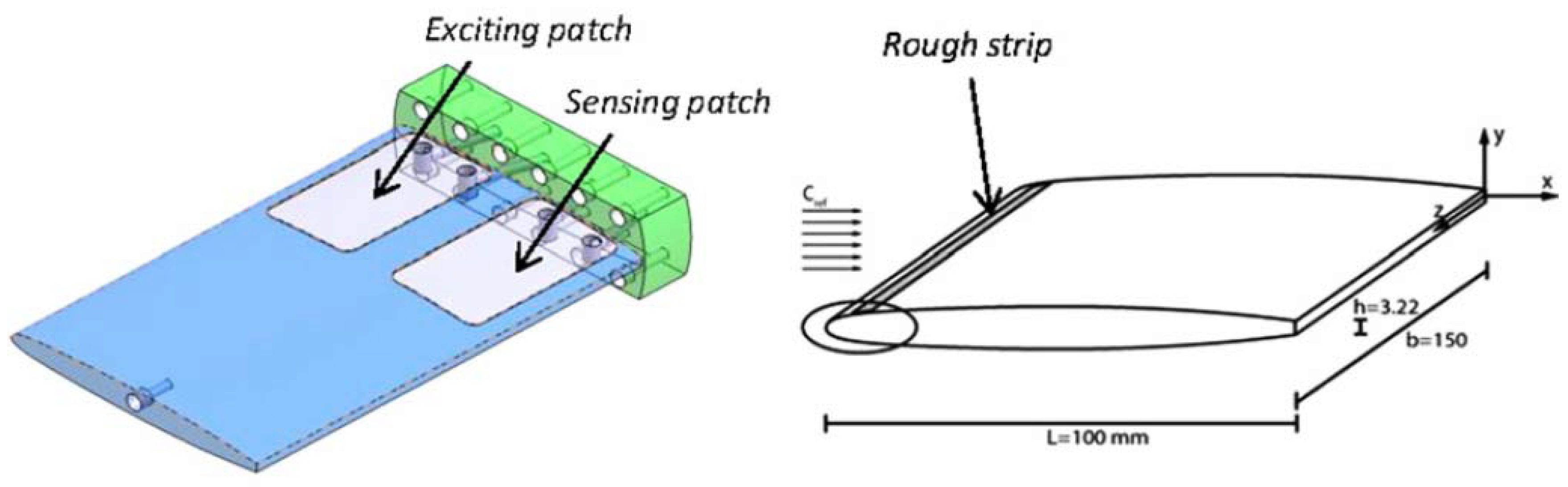
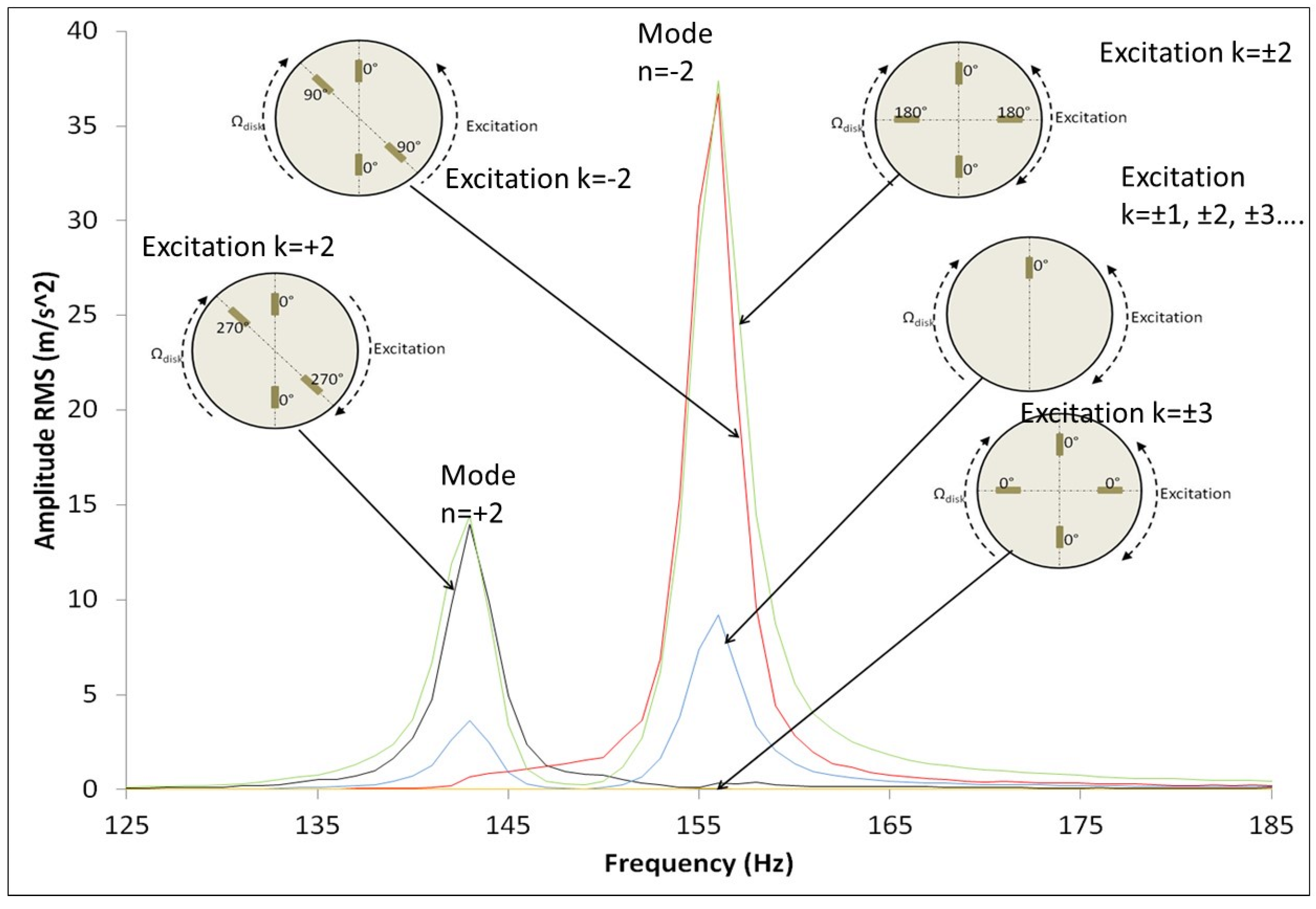
- Modal Analysis of submerged structures: By means of PZTp acting as exciters, modal parameters such as natural frequencies, mode shapes, and damping ratios have been experimentally obtained for submerged structures with complex boundary conditions (confined structures, rotating structures, cavitating structures, non-rigid boundaries) for the first time. These exciters are thin, light, and small and do not disturb the flow. The main drawback is that there is not a linear relation between voltage/force and therefore the FRF in terms of displacement/force cannot be easily obtained.
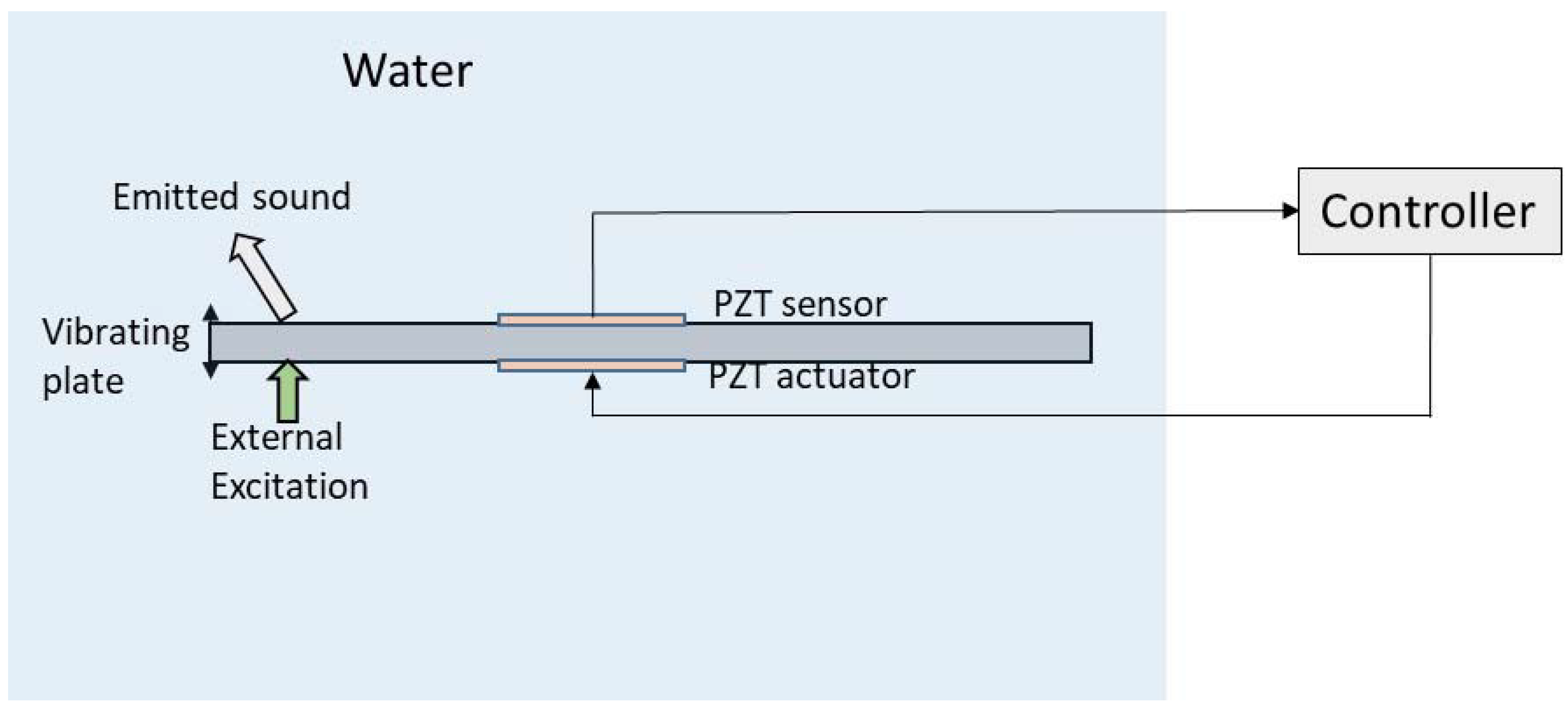
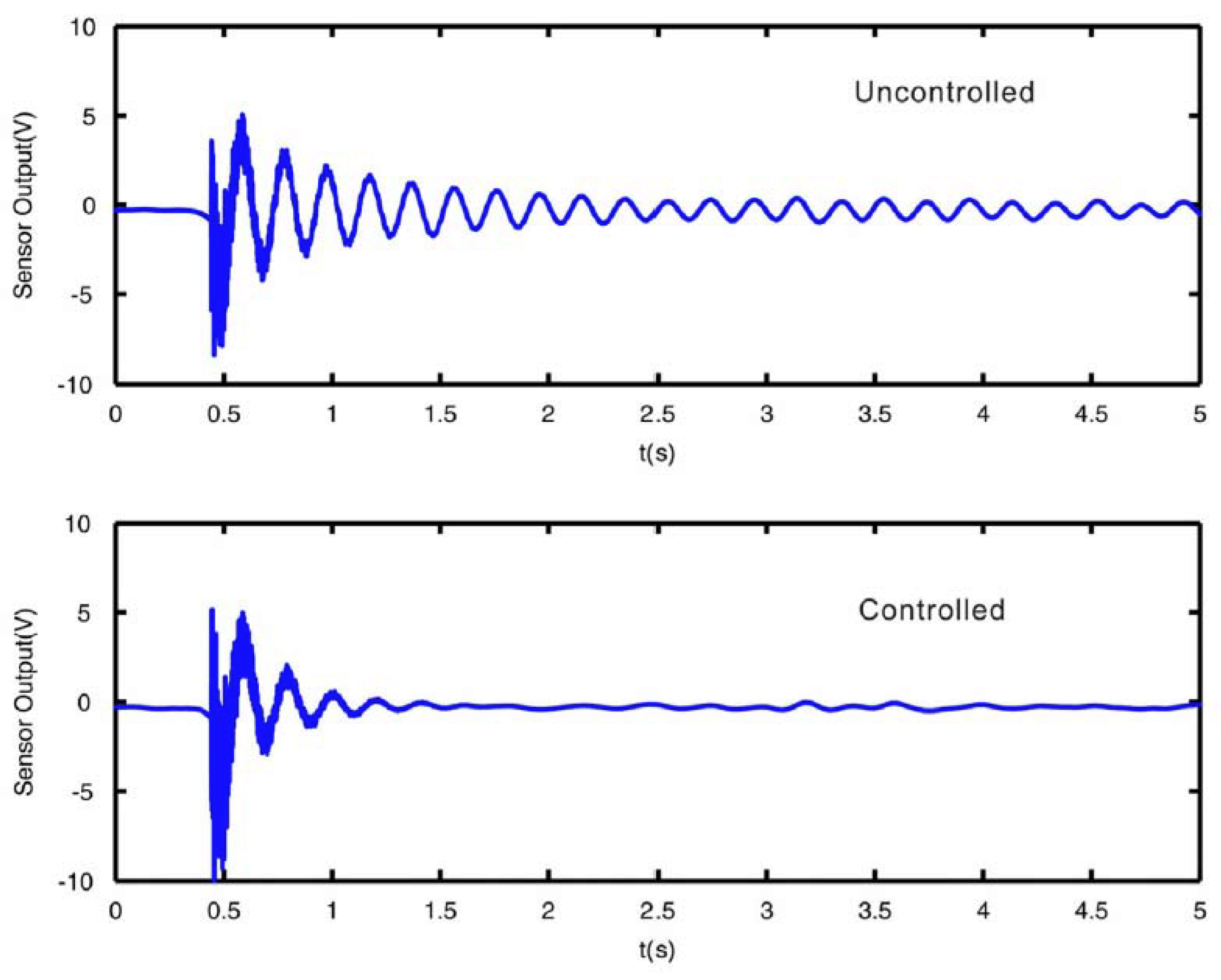
- Active vibration control (AVC) of submerged structures: The active vibration control of submerged structures, which has a relevant interest in many engineering applications, has been recently investigated by some researchers. PZTp are almost the only type of sensors/actuators used for this purpose. Numerical and Experimental results performed in thin plates and cylindrical shells show the potentiality of using active vibration control systems based on PZTp to suppress vibrations in generic submerged structures.
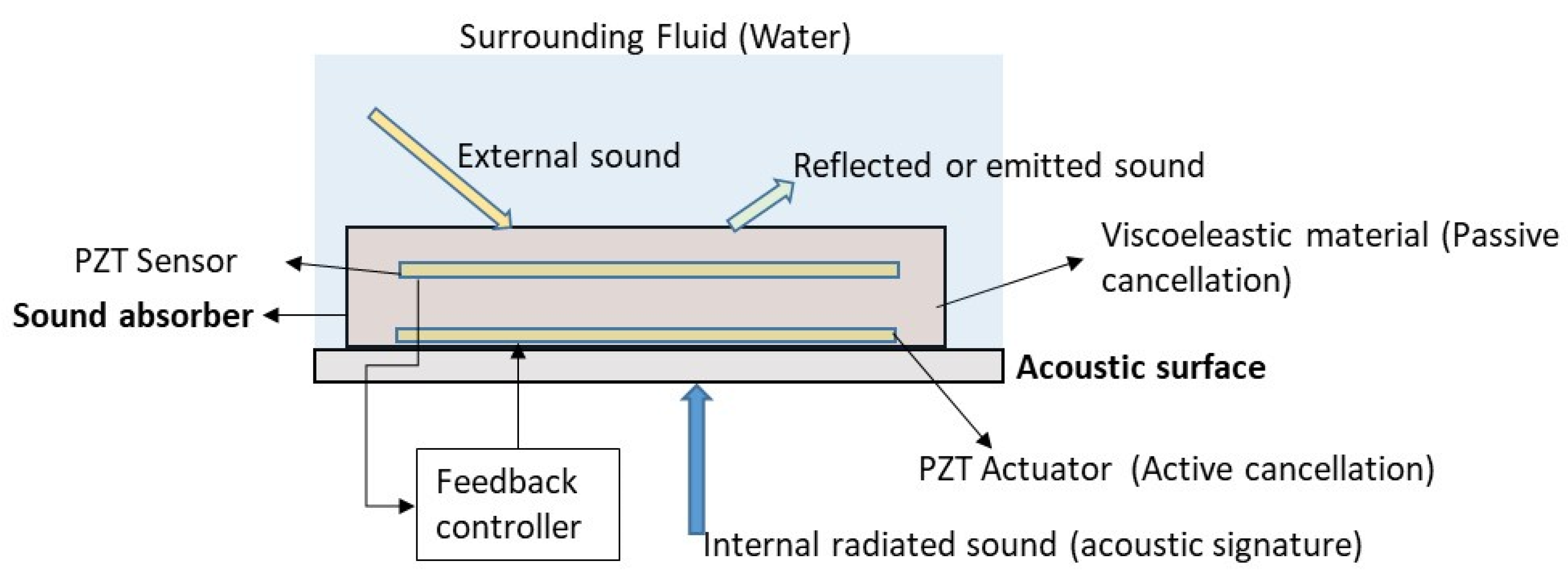
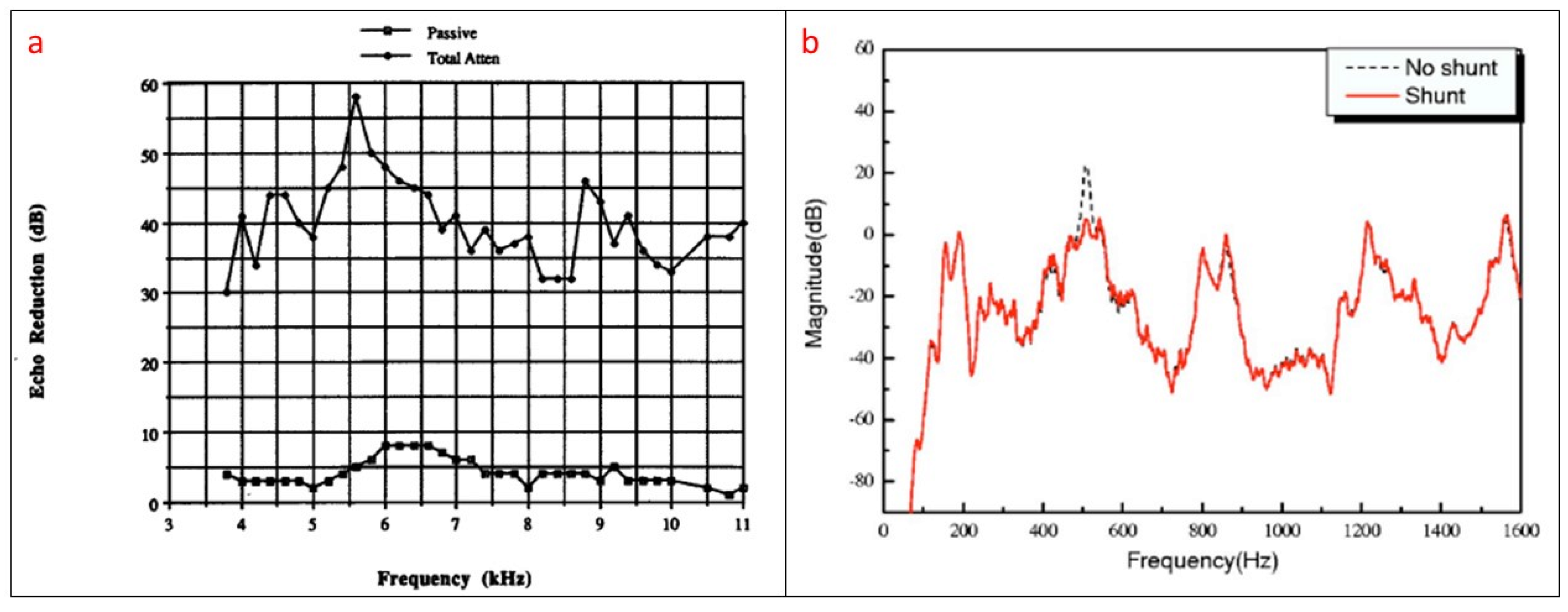
- Sound cancellation of submerged systems: Passive/active sound absorbers (PZT sensor + PZT actuator + viscoelastic material) have shown good attenuation characteristic in a broad frequency bandwidth, when they have been used in submerged systems. Compared to simple passive systems, based on viscoelastic materials, a much higher effectiveness has been experimentally demonstrated. Semi-active absorbers (PZT layer + shunt circuits) are a simpler and cheaper option, where every shunt circuit is tuned to effectively cancel one frequency band. Therefore, this system may be used in case a finite number of frequencies has to be attenuated.
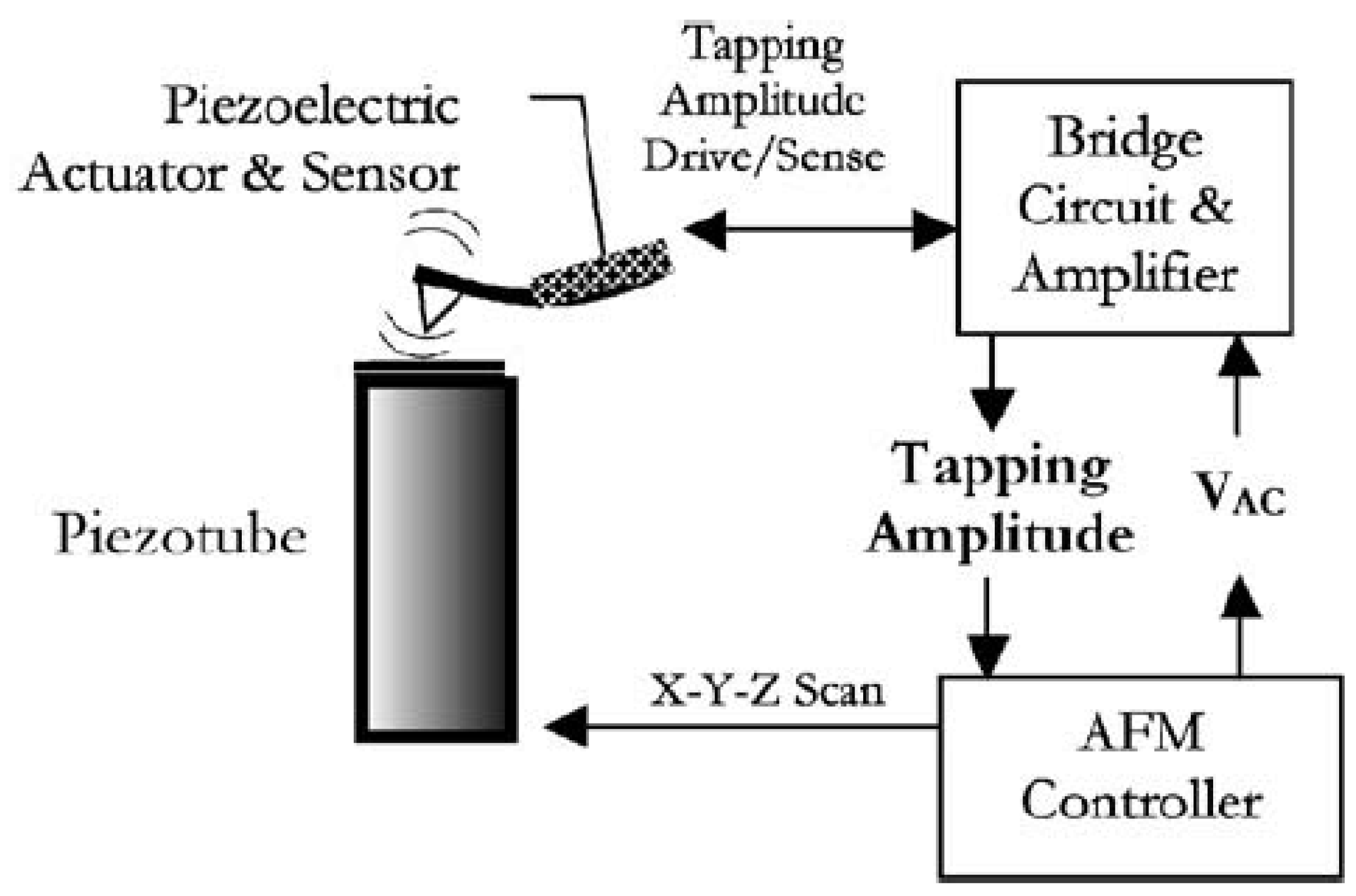
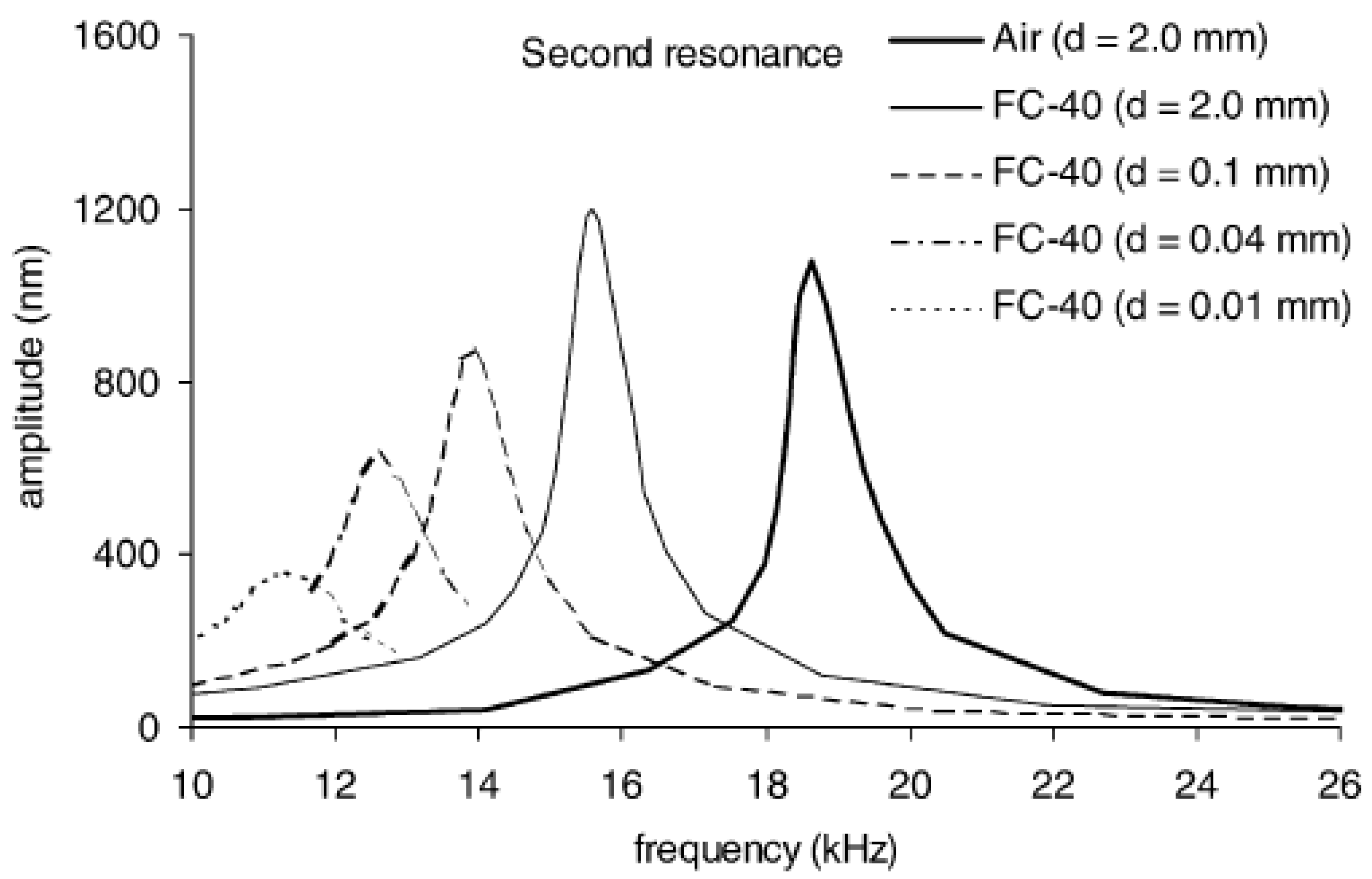
- Atomic force microscope in physiological mediums: The use of PZT transducers over other sensors & actuators used in AFM, considerably simplifies the device. Furthermore, when the AFM works in tapping mode scanning physiological samples in submerged mediums, the use of PZT transducers allows very high scanning speeds which is of paramount importance to observe biological processes on-live and also protect the fragile surfaces of the samples from the scanning forces.
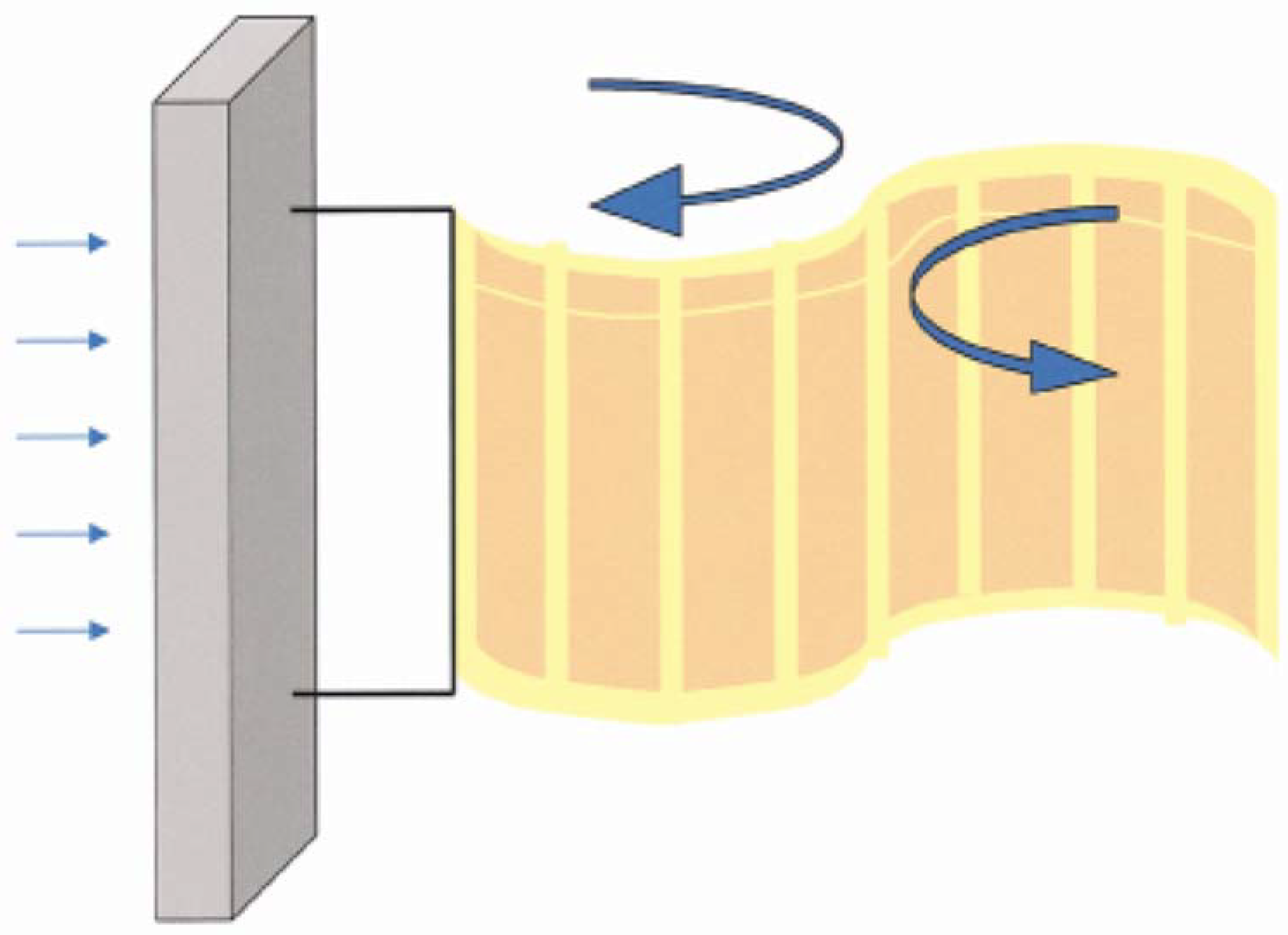
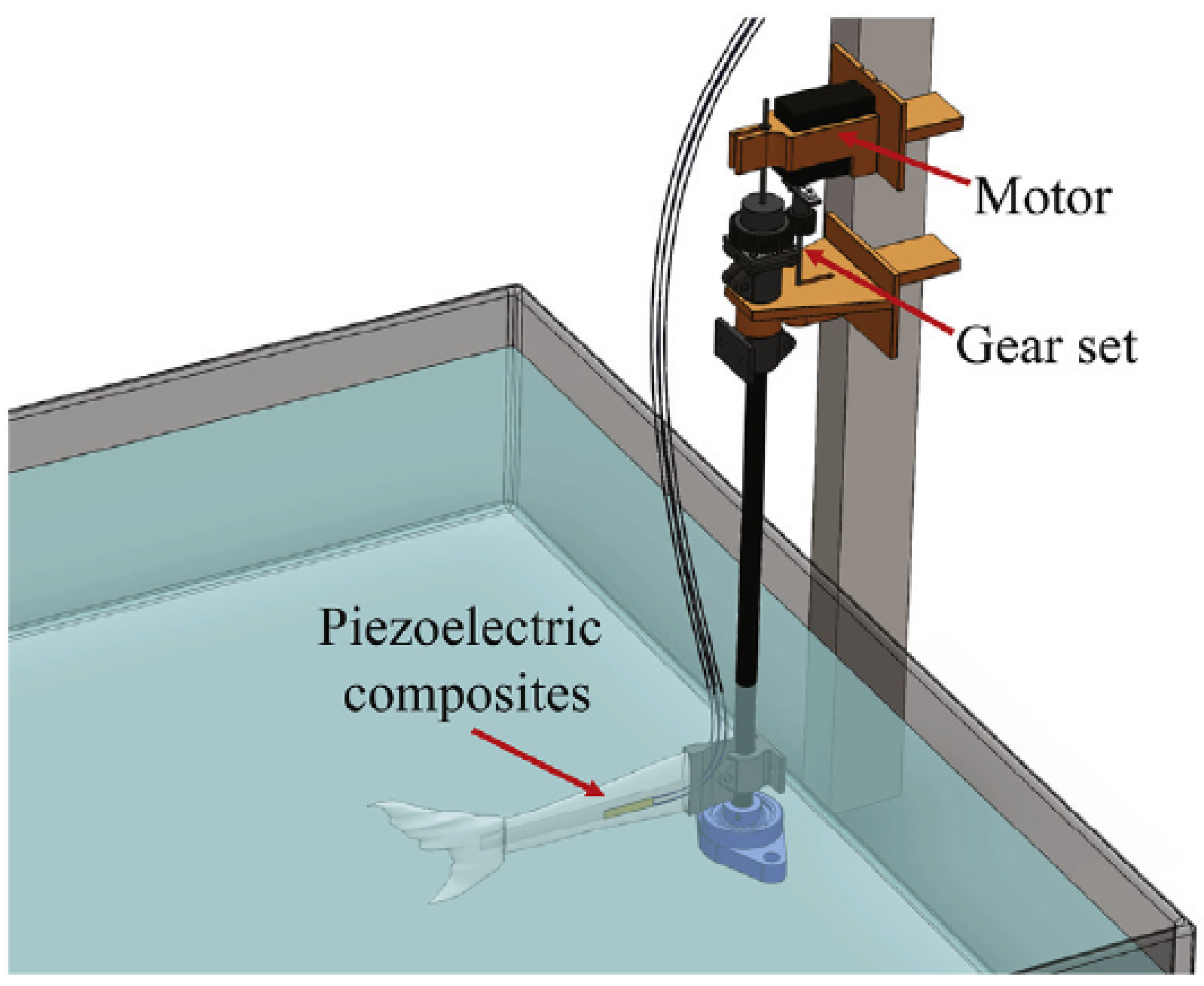
- Energy harvesting: In recent years, PZTp have been widely used for energy harvesting in submerged applications. This has permitted the design of wireless and self-sustainable sensors that do not use batteries (and are therefore more ecological) for oceanic, biological, and health monitoring applications. In the present work, different ways to harvest energy from water currents by means of PZTp, which have been recently used, have been reviewed.
Funding
Conflicts of Interest
References
- Preumont, A. Mechatronics: Dynamics of Electromechanical and Piezoelectric Systems; Springer Science & Business Media: Berlin, Germany, 2006; Volume 136. [Google Scholar]
- Preumont, A. Vibration Control of Active Structures. An Introduction; Springer: Dordrecht, The Netherlands, 2011; Volume 179. [Google Scholar]
- Lee, C. Theory of laminated piezoelectric plates for the design of distributed sensors/actuators. Part I: Governing equations and reciprocal relationships. J. Acoust. Soc. Am. 1990, 87, 1144–1158. [Google Scholar] [CrossRef]
- Ting, R.Y. The piezoelectric properties of some PZT composites. Ferroelectrics 1983, 49, 251–256. [Google Scholar] [CrossRef]
- Klicker, K.; Biggers, J.; Newnham, R. Composites of PZT and epoxy for hydrostatic transducer applications. J. Am. Ceram. Soc. 1981, 64, 5–9. [Google Scholar] [CrossRef]
- Wang, S.; Liu, K.X. Experimental research on dynamic mechanical properties of PZT ceramic under hydrostatic pressure. Mater. Sci. Eng. A 2011, 528, 6463–6468. [Google Scholar] [CrossRef]
- Stojanovic, M. Recent advances in high-speed underwater acoustic communications. IEEE J. Ocean. Eng. 1996, 21, 125–136. [Google Scholar] [CrossRef]
- Ewins, D.J. Modal Testing: Theory and Practice; Research Studies Press: Letchworth, UK, 1984; Volume 15. [Google Scholar]
- Heylen, W. Modal Analysis Theory and Testing; Katholieke Universiteit Leuven: Leuven, Belgium, 2007. [Google Scholar]
- Hearn, G.; Testa, R.B. Modal analysis for damage detection in structures. J. Struct. Eng. 1991, 117, 3042–3063. [Google Scholar] [CrossRef]
- Maia, N.M.M.; e Silva, J.M.M. Theoretical and Experimental Modal Analysis; Research Studies Press: Letchworth, UK, 1997. [Google Scholar]
- Lamb, H. On the vibrations of an elastic plate in contact with water. Proc. Roy. Soc. Lond. 1921, 98, 205–216. [Google Scholar] [CrossRef]
- Amabili, M.; Forsali, G.; Kwak, M.K. Free vibrations of annular plates coupled with fluids. J. Sound Vib. 1996, 191, 825–846. [Google Scholar] [CrossRef]
- Askari, E.; Jeong, K.-H.; Amabili, M. Hydroelastic vibration of circular plates immersed in a liquid-filled container with free surface. J. Sound Vib. 2013, 332, 3064–3085. [Google Scholar] [CrossRef]
- Kwak, M. Hydroelastic vibration of circular plates. J. Sound Vib. 1997, 201, 293–303. [Google Scholar] [CrossRef]
- Amabili, M. Effect of finite fluid depth on the hydroelastic vibration of circular and annular plate. J. Sound Vib. 1996, 193, 909–925. [Google Scholar] [CrossRef]
- Kubota, Y.; Ohashi, H. A study on the natural frequencies of hydraulic pumps. In Proceedings of the 1st ASME Joint International Conference on Nuclear Engineering, Tokyo, Japan, 4–7 November 1991; pp. 589–593. [Google Scholar]
- Kubota, Y.; Suzuki, T. Added Mass Effect on Disc Vibrating in Fluid. Trans. Jpn. Soc. Mech. Eng. C 1984, 50, 243–248. [Google Scholar] [CrossRef]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C. Experimental study on the added mass and damping of a disk submerged in a partially fluid-filled tank with small radial confinement. J. Fluids Struct. 2014, 50, 1–17. [Google Scholar] [CrossRef]
- Valentín, D.; Presas, A.; Egusquiza, E.; Valero, C.; Egusquiza, M. Experimental Study of a Vibrating Disk Submerged in a Fluid-Filled Tank and Confined With a Nonrigid Cover. J. Vib. Acoust. 2017, 139, 021005. [Google Scholar] [CrossRef]
- Presas, A.; Valero, C.; Huang, X.; Egusquiza, E.; Farhat, M.; Avellan, F. Analysis of the Dynamic Response of Pump-Turbine Runners-Part I: Experiment; IOP Publishing: Bristol, UK, 2012. [Google Scholar]
- De La Torre, O.; Escaler, X.; Egusquiza, E.; Farhat, M. Experimental investigation of added mass effects on a hydrofoil under cavitation conditions. J. Fluids Struct. 2013, 39, 173–187. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. Influence of the rotation on the natural frequencies of a submerged-confined disk in water. J. Sound Vib. 2015, 337, 161–180. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. On the detection of natural frequencies and mode shapes of submerged rotating disk-like structures from the casing. Mech. Syst. Signal Process. 2015, 60, 547–570. [Google Scholar] [CrossRef]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Seidel, U. Dynamic response of a rotating disk submerged and confined. Influence of the axial gap. J. Fluids Struct. 2016, 62, 332–349. [Google Scholar] [CrossRef]
- Presas, A.; Egusquiza, E.; Valero, C.; Valentin, D.; Seidel, U. Feasibility of Using PZT Actuators to Study the Dynamic Behavior of a Rotating Disk due to Rotor-Stator Interaction. Sensors 2014, 14, 11919–11942. [Google Scholar] [CrossRef] [PubMed]
- Presas, A.; Valentin, D.; Egusquiza, E.; Valero, C.; Egusquiza, M.; Bossio, M. Accurate Determination of the Frequency Response Function of Submerged and Confined Structures by Using PZT-Patches. Sensors 2017, 17, 660. [Google Scholar] [CrossRef] [PubMed]
- Fuller, C. Active vibration control. Handb. Noise Vib. Control 2008, 770–784. [Google Scholar]
- Preumont, A. Active vibration control. Lect. Notes Univ. Libre Bruss. Bruss. Belg. 2001. [Google Scholar]
- Preumont, A. Vibration Control of Active Structures; Springer: Berlin, Germany, 1997; Volume 2. [Google Scholar]
- Baz, A.; Poh, S. Performance of an active control system with piezoelectric actuators. J. Sound Vib. 1988, 126, 327–343. [Google Scholar] [CrossRef]
- Narayanan, S.; Balamurugan, V. Finite element modelling of piezolaminated smart structures for active vibration control with distributed sensors and actuators. J. Sound Vib. 2003, 262, 529–562. [Google Scholar] [CrossRef]
- Wang, W.; Dalton, D.; Hua, X.; Wang, X.; Chen, Z.; Song, G. Experimental study on vibration control of a submerged pipeline model by eddy current tuned mass damper. Appl. Sci. 2017, 7, 987. [Google Scholar] [CrossRef]
- Song, G.; Zhang, P.; Li, L.; Singla, M.; Patil, D.; Li, H.; Mo, Y. Vibration control of a pipeline structure using pounding tuned mass damper. J. Eng. Mech. 2016, 142, 04016031. [Google Scholar] [CrossRef]
- Clark, R.L.; Fuller, C.R. Experiments on active control of structurally radiated sound using multiple piezoceramic actuators. J. Acoust. Soc. Am. 1992, 91, 3313–3320. [Google Scholar] [CrossRef]
- Gu, Y.; Clark, R.; Fuller, C.; Zander, A. Experiments on active control of plate vibration using piezoelectric actuators and polyvinylidene fluoride (PVDF) modal sensors. J. Vib. Acoust. 1994, 116, 303–308. [Google Scholar] [CrossRef]
- Qiu, Z.-C.; Zhang, X.-M.; Wu, H.-X.; Zhang, H.-H. Optimal placement and active vibration control for piezoelectric smart flexible cantilever plate. J. Sound Vib. 2007, 301, 521–543. [Google Scholar] [CrossRef]
- Clark, R.L.; Fuller, C.R. Active control of structurally radiated sound from an enclosed finite cylinder. J. Intell. Mater. Syst. Struct. 1994, 5, 379–391. [Google Scholar] [CrossRef]
- Lester, H.C.; Lefebvre, S. Piezoelectric actuator models for active sound and vibration control of cylinders. J. Intell. Mater. Syst. Struct. 1993, 4, 295–306. [Google Scholar] [CrossRef]
- Sonti, V.R.; Jones, J. Active Vibration Control of Thin Cylindrical Shells Using Piezo-Electric Actuators. In Proceedings of the Conference on Recent Advances in Active Control of Sound and Vibration, Blacksburg, VA, USA, 15–17 April 1991; pp. 27–38. [Google Scholar]
- Li, S.; Zhao, D. Numerical simulation of active control of structural vibration and acoustic radiation of a fluid-loaded laminated plate. J. Sound Vib. 2004, 272, 109–124. [Google Scholar] [CrossRef]
- Li, S. Active modal control simulation of vibro-acoustic response of a fluid-loaded plate. J. Sound Vib. 2011, 330, 5545–5557. [Google Scholar] [CrossRef]
- Kwak, M.K.; Yang, D.-H. Active Vibration Control of a Hanged Rectangular Plate Partially Submerged Into Fluid by Using Piezoelectric Sensors and Actuators. In Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014. [Google Scholar]
- Kwak, M.K.; Yang, D.-H. Dynamic modelling and active vibration control of a submerged rectangular plate equipped with piezoelectric sensors and actuators. J. Fluids Struct. 2015, 54, 848–867. [Google Scholar] [CrossRef]
- Pan, X.; Tso, Y.; Juniper, R. Active control of radiated pressure of a submarine hull. J. Sound Vib. 2008, 311, 224–242. [Google Scholar] [CrossRef]
- Kwak, M.K.; Yang, D.-H. Active vibration control of a ring-stiffened cylindrical shell in contact with unbounded external fluid and subjected to harmonic disturbance by piezoelectric sensor and actuator. J. Sound Vib. 2013, 332, 4775–4797. [Google Scholar] [CrossRef]
- Loghmani, A.; Danesh, M.; Keshmiri, M. Modal structural acoustic sensing with minimum number of optimally placed piezoelectric sensors. J. Sound Vib. 2016, 363, 345–358. [Google Scholar] [CrossRef]
- McKenna, M.F.; Ross, D.; Wiggins, S.M.; Hildebrand, J.A. Underwater radiated noise from modern commercial ships. J. Acoust. Soc. Am. 2012, 131, 92–103. [Google Scholar] [CrossRef] [PubMed]
- Caresta, M.; Kessissoglou, N.J. Acoustic signature of a submarine hull under harmonic excitation. Appl. Acoust. 2010, 71, 17–31. [Google Scholar] [CrossRef]
- Holliday, D. Extracting bio-physical information from the acoustic signature of marine organisms. Ocean. Sound Scatt. Predict. 1977, 619–624. [Google Scholar]
- Ford, J.K. Acoustic behaviour of resident killer whales (Orcinus orca) off Vancouver Island, British Columbia. Can. J. Zool. 1989, 67, 727–745. [Google Scholar] [CrossRef]
- Scandrett, C.; Shin, Y.; Hung, K.; Khan, M.; Lilian, C. Cancellation techniques in underwater scattering of acoustic signals. J. Sound Vib. 2004, 272, 513–537. [Google Scholar] [CrossRef]
- Gangemi, P.J.; Kanapathipillai, S. Submarine structural and acoustic attenuation. J. Vib. Control 2016, 22, 3135–3150. [Google Scholar] [CrossRef]
- Sellen, N.; Cuesta, M.; Galland, M.A. Noise reduction in a flow duct: Implementation of a hybrid passive/active solution. J. Sound Vib. 2006, 297, 492–511. [Google Scholar] [CrossRef]
- Betgen, B.; Galland, M.-A. A new hybrid active/passive sound absorber with variable surface impedance. Mech. Syst. Signal Process. 2011, 25, 1715–1726. [Google Scholar] [CrossRef]
- Zieliński, T.G. Numerical investigation of active porous composites with enhanced acoustic absorption. J. Sound Vib. 2011, 330, 5292–5308. [Google Scholar] [CrossRef]
- Tomlinson, G.R. Overview of Active/Passive Damping Techniques Employing Viscoelastic Materials. In Proceedings of the 3rd International Conference on Intelligent Materials and 3rd European Conference on Smart Structures and Materials, Lyon, France, 26 April 1996; International Society for Optics and Photonics: Bellingham, WA, USA, 1996; pp. 656–670. [Google Scholar]
- Johnson, C.D.; Kienholz, D.A. Finite element prediction of damping in structures with constrained viscoelastic layers. AIAA J. 1982, 20, 1284–1290. [Google Scholar]
- Toulis, W. Acoustic refraction and scattering with compliant elements. I. Measurements in water. J. Acoust. Soc. Am. 1957, 29, 1021–1026. [Google Scholar] [CrossRef]
- Di Meglio, A.; Jones, J.; Coates, R.; Francis, D.; Wang, L. Combined finite element-boundary element analysis of a viscoelastic anechoic panel for underwater applications. In Proceedings of the OCEANS’97. MTS/IEEE Conference Proceedings, Halifax, NS, Canada, 6–9 October 1997; pp. 1189–1194. [Google Scholar]
- Howarth, T.R.; Varadan, V.K.; Bao, X.; Varadan, V.V. Piezocomposite coating for active underwater sound reduction. J. Acoust. Soc. Am. 1992, 91, 823–831. [Google Scholar] [CrossRef]
- Rongong, J.; Wright, J.; Wynne, R.; Tomlinson, G. Modelling of a hybrid constrained layer/piezoceramic approach to active damping. J. Vib. Acoust. 1997, 119, 120–130. [Google Scholar] [CrossRef]
- Loghmani, A.; Danesh, M.; Kwak, M.K.; Keshmiri, M. Active structural acoustic control of a smart cylindrical shell using a virtual microphone. Smart Mater. Struct. 2016, 25, 045020. [Google Scholar] [CrossRef]
- Hasheminejad, S.M.; Keshavarzpour, H. Robust active sound radiation control of a piezo-laminated composite circular plate of arbitrary thickness based on the exact 3D elasticity model. J. Low Freq. Noise Vib. Act. Control 2016, 35, 101–127. [Google Scholar] [CrossRef]
- Hasheminejad, S.M.; Rabbani, V.; Alaei-Varnosfaderani, M. Active transient elasto-acoustic response damping of a thick-walled liquid-coupled piezolaminated cylindrical vessel. Mech. Based Des. Struct. Mach. 2016, 44, 189–211. [Google Scholar] [CrossRef]
- Braga, A.M.; Honein, B.; Barbone, P.E.; Herrmann, G. Suppression of sound reflected from a piezoelectric plate. J. Intell. Mater. Syst. Struct. 1992, 3, 209–223. [Google Scholar] [CrossRef]
- Kim, J.; Jung, Y.-C. Broadband noise reduction of piezoelectric smart panel featuring negative-capacitive-converter shunt circuit. J. Acoust. Soc. Am. 2006, 120, 2017–2025. [Google Scholar] [CrossRef]
- Sun, Y.; Li, Z.; Huang, A.; Li, Q. Semi-active control of piezoelectric coating’s underwater sound absorption by combining design of the shunt impedances. J. Sound Vib. 2015, 355, 19–38. [Google Scholar] [CrossRef]
- Zhang, J.; Chang, W.; Varadan, V.; Varadan, V. Passive underwater acoustic damping using shunted piezoelectric coatings. Smart Mater. Struct. 2001, 10, 414. [Google Scholar] [CrossRef]
- Kim, J.; Kim, J.-H. Multimode shunt damping of piezoelectric smart panel for noise reduction. J. Acoust. Soc. Am. 2004, 116, 942–948. [Google Scholar] [CrossRef] [PubMed]
- Bennig, G.K. Atomic Force Microscope and Method for Imaging Surfaces with Atomic Resolution. U.S. Patents US4724318A, 9 February 1988. [Google Scholar]
- Binnig, G.; Quate, C.F.; Gerber, C. Atomic force microscope. Phys. Rev. Lett. 1986, 56, 930. [Google Scholar] [CrossRef] [PubMed]
- Butt, H.-J.; Cappella, B.; Kappl, M. Force measurements with the atomic force microscope: Technique, interpretation and applications. Surf. Sci. Rep. 2005, 59, 1–152. [Google Scholar] [CrossRef]
- Bryant, P.; Miller, R.; Yang, R. Scanning tunneling and atomic force microscopy combined. Appl. Phys. Lett. 1988, 52, 2233–2235. [Google Scholar] [CrossRef]
- Adams, J.; Parrott, G.; Bauer, C.; Sant, T.; Manning, L.; Jones, M.; Rogers, B.; McCorkle, D.; Ferrell, T. Nanowatt chemical vapor detection with a self-sensing, piezoelectric microcantilever array. Appl. Phys. Lett. 2003, 83, 3428–3430. [Google Scholar] [CrossRef]
- Minne, S.; Manalis, S.; Quate, C. Parallel atomic force microscopy using cantilevers with integrated piezoresistive sensors and integrated piezoelectric actuators. Appl. Phys. Lett. 1995, 67, 3918–3920. [Google Scholar] [CrossRef]
- Gross, L.; Mohn, F.; Moll, N.; Liljeroth, P.; Meyer, G. The chemical structure of a molecule resolved by atomic force microscopy. Science 2009, 325, 1110–1114. [Google Scholar] [CrossRef] [PubMed]
- Geisse, N.A. AFM and combined optical techniques. Mater. Today 2009, 12, 40–45. [Google Scholar] [CrossRef]
- Kim, Y.-S.; Nam, H.-J.; Cho, S.-M.; Hong, J.-W.; Kim, D.-C.; Bu, J.U. PZT cantilever array integrated with piezoresistor sensor for high speed parallel operation of AFM. Sens. Actuators A Phys. 2003, 103, 122–129. [Google Scholar] [CrossRef]
- Korayem, M.H.; Nahavandi, A. Modeling and simulation of AFM cantilever with two piezoelectric layers submerged in liquid over rough surfaces. Precis. Eng. 2015, 42, 261–275. [Google Scholar] [CrossRef]
- Rogers, B.; Sulchek, T.; Murray, K.; York, D.; Jones, M.; Manning, L.; Malekos, S.; Beneschott, B.; Adams, J.; Cavazos, H. High speed tapping mode atomic force microscopy in liquid using an insulated piezoelectric cantilever. Rev. Sci. Instrum. 2003, 74, 4683–4686. [Google Scholar] [CrossRef]
- Rogers, B.; Manning, L.; Sulchek, T.; Adams, J. Improving tapping mode atomic force microscopy with piezoelectric cantilevers. Ultramicroscopy 2004, 100, 267–276. [Google Scholar] [CrossRef] [PubMed]
- Giessibl, F.J. High-speed force sensor for force microscopy and profilometry utilizing a quartz tuning fork. Appl. Phys. Lett. 1998, 73, 3956–3958. [Google Scholar] [CrossRef]
- Thundat, T.; Chen, G.Y.; Warmack, R.J.; Allison, D.P.; Wachter, E.A. Vapor Detection Using Resonating Microcantilevers. Anal. Chem. 1995, 67, 519–521. [Google Scholar] [CrossRef]
- Sulchek, T.; Grow, R.; Yaralioglu, G.; Minne, S.; Quate, C.; Manalis, S.; Kiraz, A.; Aydine, A.; Atalar, A. Parallel atomic force microscopy with optical interferometric detection. Appl. Phys. Lett. 2001, 78, 1787–1789. [Google Scholar] [CrossRef]
- Zhong, Q.; Inniss, D.; Kjoller, K.; Elings, V.B. Fractured polymer/silica fiber surface studied by tapping mode atomic force microscopy. Surf. Sci. Lett. 1993, 290, L688–L692. [Google Scholar]
- Hansma, P.; Cleveland, J.; Radmacher, M.; Walters, D.; Hillner, P.; Bezanilla, M.; Fritz, M.; Vie, D.; Hansma, H.; Prater, C. Tapping mode atomic force microscopy in liquids. Appl. Phys. Lett. 1994, 64, 1738–1740. [Google Scholar] [CrossRef]
- Dufrêne, Y.F.; Ando, T.; Garcia, R.; Alsteens, D.; Martinez-Martin, D.; Engel, A.; Gerber, C.; Müller, D.J. Imaging modes of atomic force microscopy for application in molecular and cell biology. Nat. Nanotechnol. 2017, 12, 295. [Google Scholar] [CrossRef] [PubMed]
- Uchihashi, T.; Watanabe, H.; Fukuda, S.; Shibata, M.; Ando, T. Functional extension of high-speed AFM for wider biological applications. Ultramicroscopy 2016, 160, 182–196. [Google Scholar] [CrossRef] [PubMed]
- Sader, J.E. Frequency response of cantilever beams immersed in viscous fluids with applications to the atomic force microscope. J. Appl. Phys. 1998, 84, 64–76. [Google Scholar] [CrossRef]
- Green, C.P.; Sader, J.E. Frequency response of cantilever beams immersed in viscous fluids near a solid surface with applications to the atomic force microscope. J. Appl. Phys. 2005, 98, 114913. [Google Scholar] [CrossRef]
- Naik, T.; Longmire, E.K.; Mantell, S.C. Dynamic response of a cantilever in liquid near a solid wall. Sens. Actuators A Phys. 2003, 102, 240–254. [Google Scholar] [CrossRef]
- Korayem, M.H.; Nahavandi, A. Analyzing the vibrational response of an AFM cantilever in liquid with the consideration of tip mass by comparing the hydrodynamic and contact repulsive force models in higher modes. Appl. Phys. A 2017, 123, 265. [Google Scholar] [CrossRef]
- Kim, H.; Tadesse, Y.; Priya, S. Piezoelectric Energy Harvesting. In Energy Harvesting Technologies; Priya, S., Inman, D.J., Eds.; Springer: Boston, MA, USA, 2009; pp. 3–39. [Google Scholar]
- Erturk, A.; Inman, D.J. Piezoelectric Energy Harvesting; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Howells, C.A. Piezoelectric energy harvesting. Energy Convers. Manag. 2009, 50, 1847–1850. [Google Scholar] [CrossRef]
- Sodano, H.A.; Inman, D.J.; Park, G. Comparison of piezoelectric energy harvesting devices for recharging batteries. J. Intell. Mater. Syst. Struct. 2005, 16, 799–807. [Google Scholar] [CrossRef]
- Rostami, A.B.; Armandei, M. Renewable energy harvesting by vortex-induced motions: Review and benchmarking of technologies. Renew. Sustain. Energy Rev. 2017, 70, 193–214. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L.; Li, H. Vibration energy harvesting using macro-fiber composites. Smart Mater. Struct. 2009, 18, 115025. [Google Scholar] [CrossRef]
- Farinholt, K.M.; Pedrazas, N.A.; Schluneker, D.M.; Burt, D.W.; Farrar, C.R. An energy harvesting comparison of piezoelectric and ionically conductive polymers. J. Intell. Mater. Syst. Struct. 2009, 20, 633–642. [Google Scholar] [CrossRef]
- Akaydin, H.D.; Elvin, N.; Andreopoulos, Y. Energy harvesting from highly unsteady fluid flows using piezoelectric materials. J. Intell. Mater. Syst. Struct. 2010, 21, 1263–1278. [Google Scholar] [CrossRef]
- Curtin, T.B.; Bellingham, J.G.; Catipovic, J.; Webb, D. Autonomous oceanographic sampling networks. Oceanography 1993, 6, 86–94. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Lu, J.; Myjak, M.J.; Martinez, J.J.; Brown, R.S.; Deng, Z.D. An energy harvesting underwater acoustic transmitter for aquatic animals. Sci. Rep. 2016, 6, 33804. [Google Scholar] [CrossRef] [PubMed]
- Cunefare, K.A.; Skow, E.; Erturk, A.; Savor, J.; Verma, N.; Cacan, M. Energy harvesting from hydraulic pressure fluctuations. Smart Mater. Struct. 2013, 22, 025036. [Google Scholar] [CrossRef]
- Allen, J.J.; Smits, A.J. Energy harvesting eel. J. Fluids Struct. 2001, 15, 629–640. [Google Scholar] [CrossRef]
- Taylor, G.W.; Burns, J.R.; Kammann, S.A.; Powers, W.B.; Welsh, T.R. The Energy Harvesting Eel: A small subsurface ocean/river power generator. IEEE J. Ocean. Eng. 2001, 26, 539–547. [Google Scholar] [CrossRef]
- Carroll, C.B. Energy Harvesting EEL. U.S. Patents US6424079B1, 23 July 2002. [Google Scholar]
- Priya, S. Advances in energy harvesting using low profile piezoelectric transducers. J. Electroceram. 2007, 19, 167–184. [Google Scholar] [CrossRef]
- Song, R.; Shan, X.; Lv, F.; Xie, T. A study of vortex-induced energy harvesting from water using PZT piezoelectric cantilever with cylindrical extension. Ceram. Int. 2015, 41, S768–S773. [Google Scholar] [CrossRef]
- Cha, Y.; Kim, H.; Porfiri, M. Energy harvesting from underwater base excitation of a piezoelectric composite beam. Smart Mater. Struct. 2013, 22, 115026. [Google Scholar] [CrossRef]
- Shan, X.; Deng, J.; Song, R.; Xie, T. A Piezoelectric Energy Harvester with Bending–Torsion Vibration in Low-Speed Water. Appl. Sci. 2017, 7, 116. [Google Scholar] [CrossRef]
- Shan, X.; Song, R.; Fan, M.; Xie, T. Energy-harvesting performances of two tandem piezoelectric energy harvesters with cylinders in water. Appl. Sci. 2016, 6, 230. [Google Scholar] [CrossRef]
- Zhang, L.; Abdelkefi, A.; Dai, H.; Naseer, R.; Wang, L. Design and experimental analysis of broadband energy harvesting from vortex-induced vibrations. J. Sound Vib. 2017, 408, 210–219. [Google Scholar] [CrossRef]
- Li, H.; Tian, C.; Deng, Z.D. Energy harvesting from low frequency applications using piezoelectric materials. Appl. Phys. Rev. 2014, 1, 041301. [Google Scholar] [CrossRef]
- Alper, E.; Ghislain, D. Underwater thrust and power generation using flexible piezoelectric composites: An experimental investigation toward self-powered swimmer-sensor platforms. Smart Mater. Struct. 2011, 20, 125013. [Google Scholar]
- Cha, Y.; Chae, W.; Kim, H.; Walcott, H.; Peterson, S.D.; Porfiri, M. Energy harvesting from a piezoelectric biomimetic fish tail. Renew. Energy 2016, 86, 449–458. [Google Scholar] [CrossRef]
- Wang, D.-A.; Liu, N.-Z. A shear mode piezoelectric energy harvester based on a pressurized water flow. Sens. Actuators A Phys. 2011, 167, 449–458. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Eel | Taylor et al. [106] | 1 W (Predicted at 1 m/s) 1320 mm × 152 mm × 0.4 mm (5 PZTp) 2.5 × 10−6 W/mm3 | ||
| Cantilever with cylinder partially submerged | Song et al. [109] | 85 µW (v = 0.35 m/s) 70 mm × 20 mm × 0.2 mm 3 × 10−8 W/mm3 | Shan et al. [111] | 400 µW (v = 0.35 m/s, eccentric cylinder) 85 mm × 25 mm × 0.2 mm 9 × 10−8 W/mm3 |
| Pressure Fluctuations | Cunefare et al. [104] | 1.2 mW (Predicted, Mode 33, 400 kPa) 6.8 mm × 6.8 mm × 30 mm 8 × 10−7 W/mm3 | Wang et al. [117] | 4.9 µW (Predicted, Mode 15, 400 kPa) 8 mm × 3 mm × 0.2 mm 1 × 10−6 W/mm3 |
| Fish Tail | Li et al. [103] | 24 µW (Robotic fish, bending radius 10 cm) 10 mm × 3 mm × 0.2 mm 4 × 10−6 W/mm3 | ||
| Quiescent Water | Cha et al. [110] | 10 µW (Predicted at resonant frequency) 102 mm × 35 mm × 0.2 mm (2 PZTp) 7 × 10−9 W/mm3 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Presas, A.; Luo, Y.; Wang, Z.; Valentin, D.; Egusquiza, M. A Review of PZT Patches Applications in Submerged Systems. Sensors 2018, 18, 2251. https://doi.org/10.3390/s18072251
Presas A, Luo Y, Wang Z, Valentin D, Egusquiza M. A Review of PZT Patches Applications in Submerged Systems. Sensors. 2018; 18(7):2251. https://doi.org/10.3390/s18072251
Chicago/Turabian StylePresas, Alexandre, Yongyao Luo, Zhengwei Wang, David Valentin, and Mònica Egusquiza. 2018. "A Review of PZT Patches Applications in Submerged Systems" Sensors 18, no. 7: 2251. https://doi.org/10.3390/s18072251
APA StylePresas, A., Luo, Y., Wang, Z., Valentin, D., & Egusquiza, M. (2018). A Review of PZT Patches Applications in Submerged Systems. Sensors, 18(7), 2251. https://doi.org/10.3390/s18072251