High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor


 ,
, 
Abstract
:1. Introduction
2. Design and Structure of Current Sensor
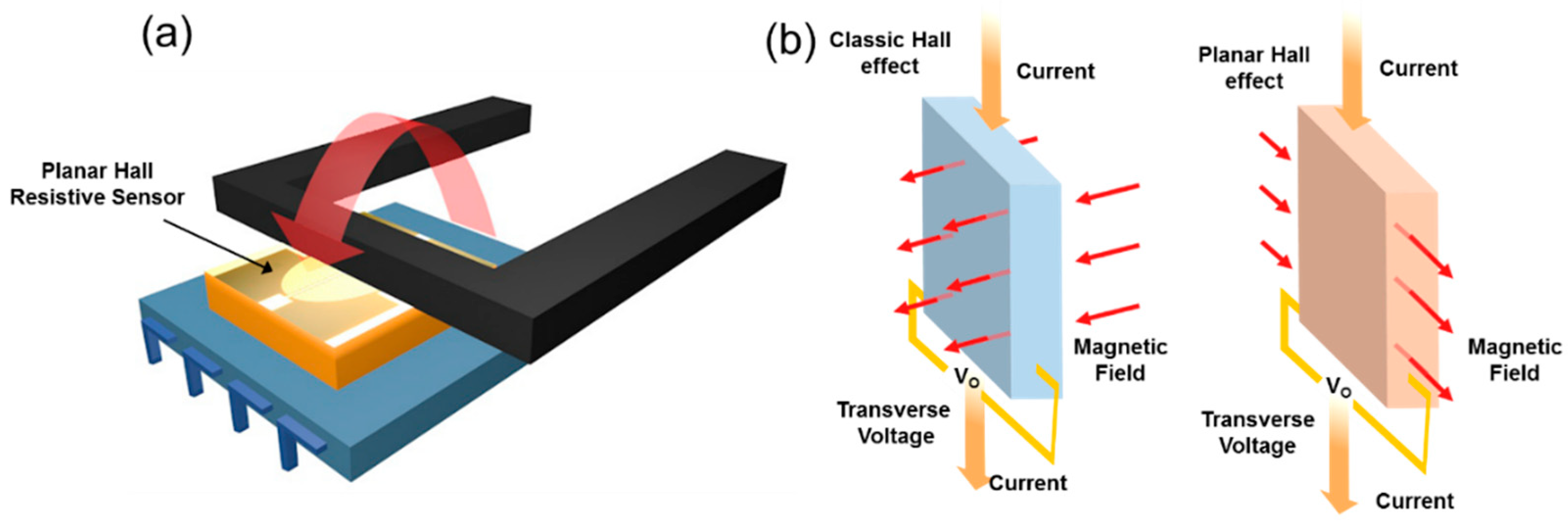
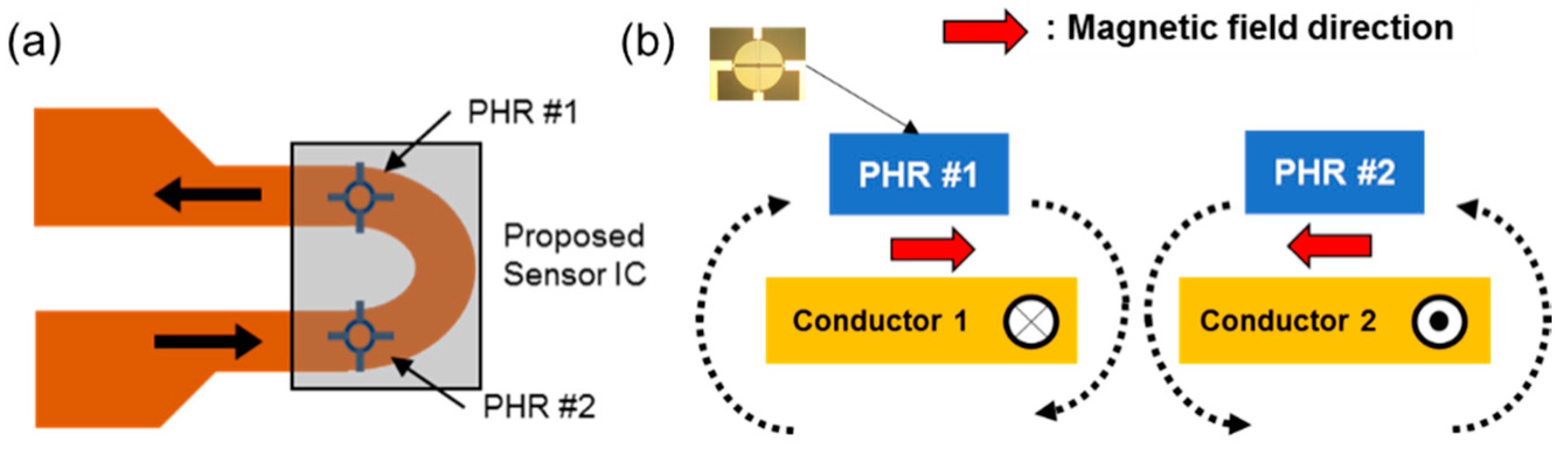
2.1. Differential Structure
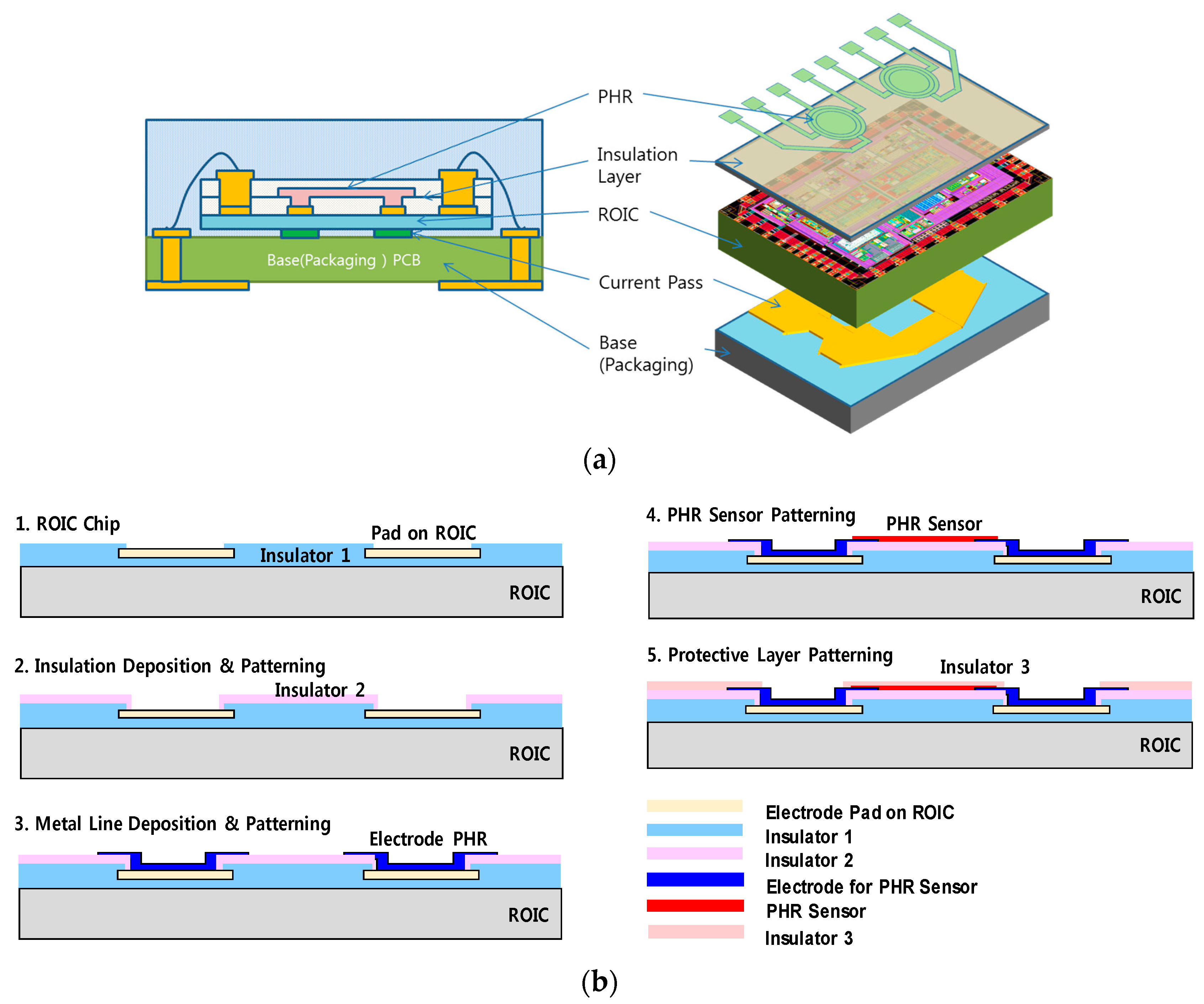
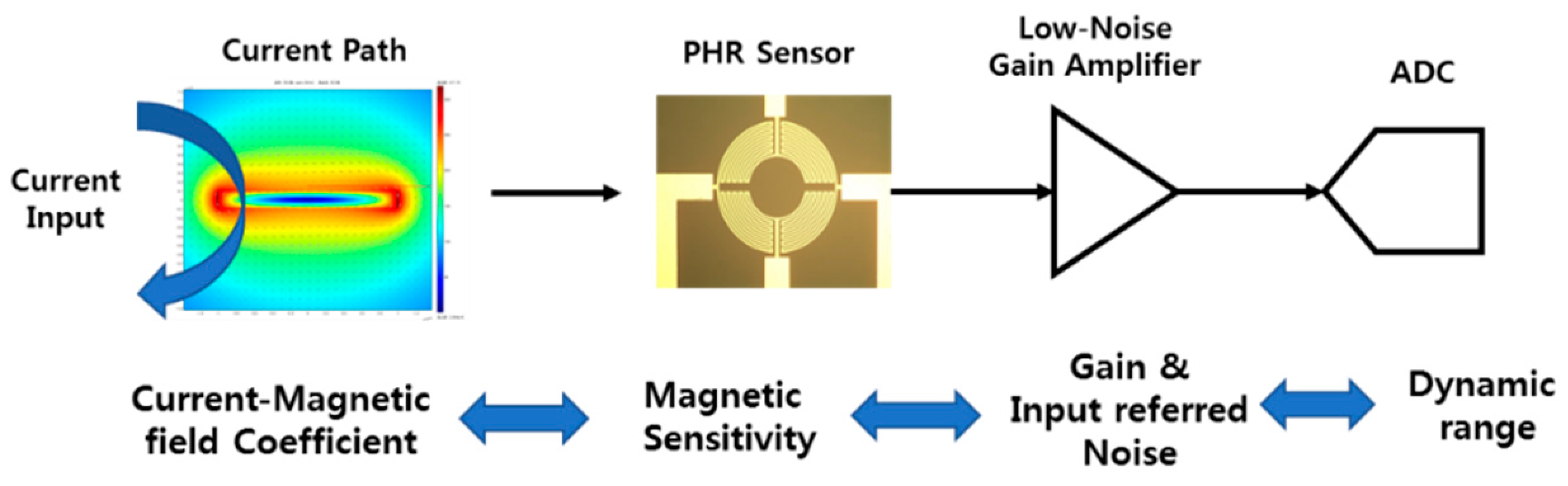
2.2. Design of Current Sensor
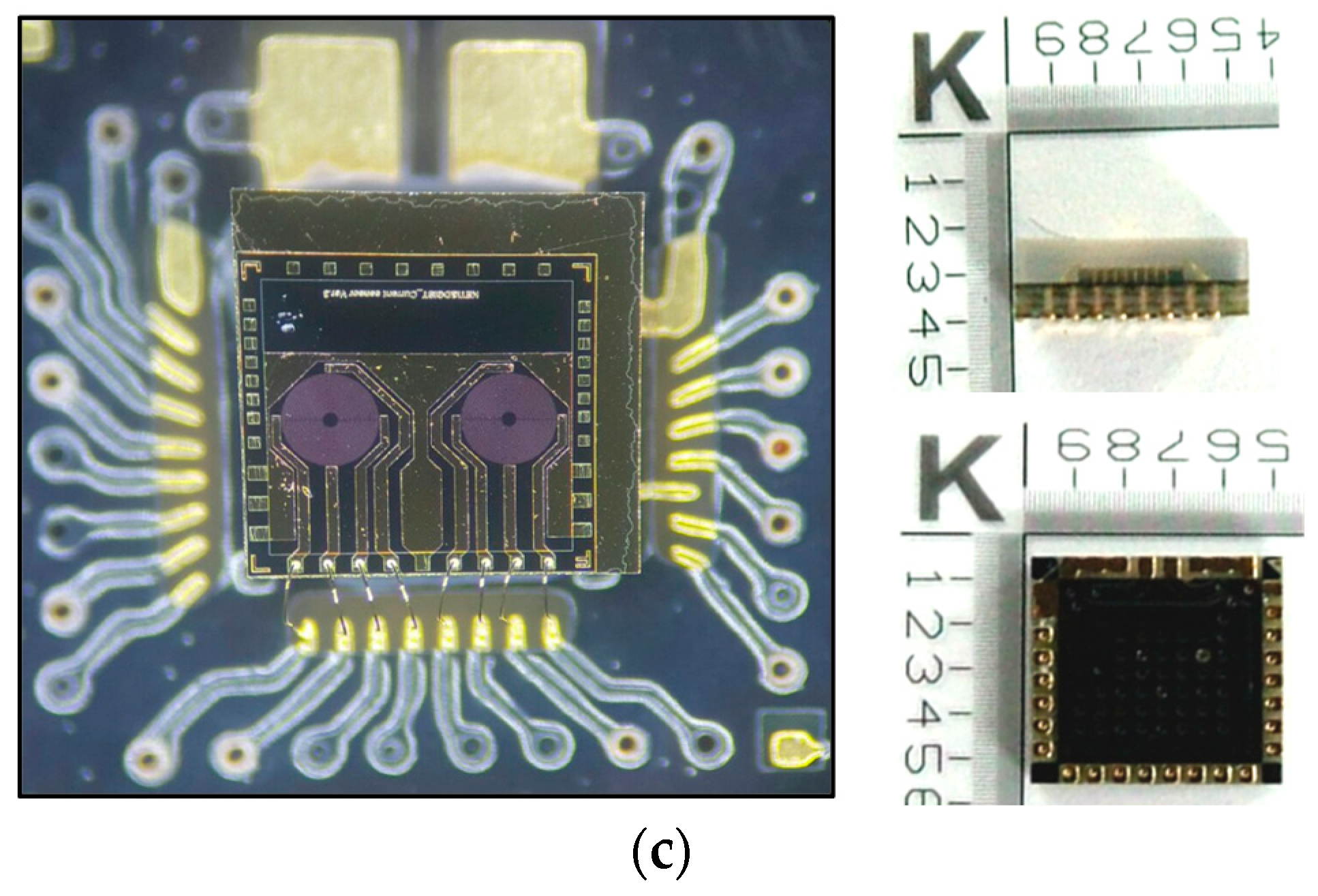
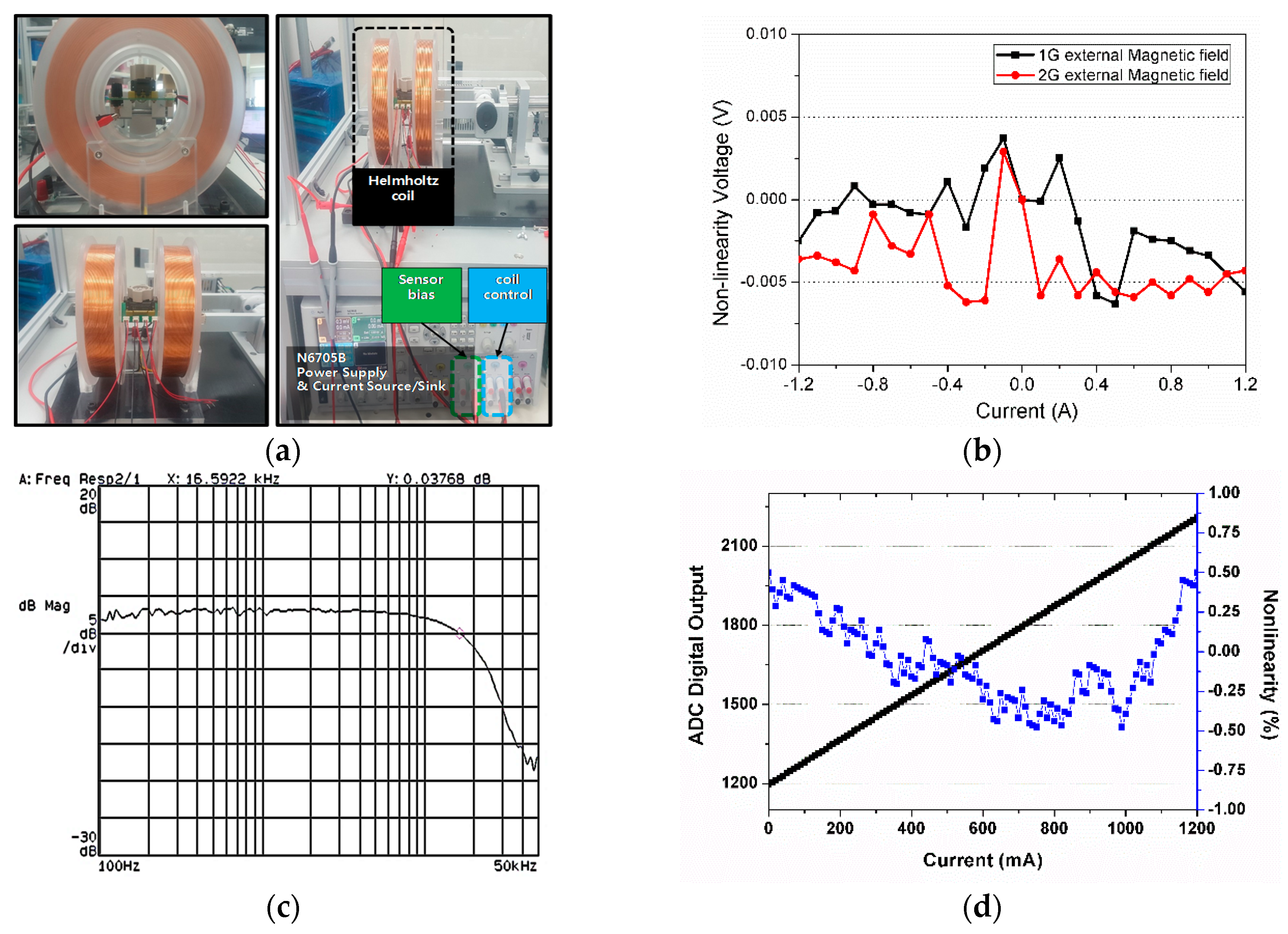
3. Implementation and Measurement Results
4. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Tuner, J.D.; Austin, L. A review of current sensor technologies and applications within automotive and traffic control systems. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2000, 214, 589–614. [Google Scholar] [CrossRef]
- Potter, C.W.; Archambault, A.; Westrick, K. Building a smarter smart grid through better renewable energy information. In Proceedings of the 2009 IEEE/PES Power Systems Conference and Exposition, Seattle, WA, USA, 15–18 March 2009. [Google Scholar] [CrossRef]
- Pelegría, J.; Ejea, J.B.; Ramírez, D.; Freitas, P.P. Spin-valve current sensor for industrial applications. Sens. Actuators A 2003, 105, 132–136. [Google Scholar] [CrossRef]
- Ziegler, S.; Woodward, R.C.; Iu, H.H.; Borle, L.J. Current sensing techniques: A review. IEEE Sens. J. 2009, 9, 354–376. [Google Scholar] [CrossRef]
- Laimer, G.; Kolar, J.W. Design and Experimental Analysis of a DC to 1 MHz Closed Loop Magnetoresistive Current Sensor. In Proceedings of the Twentieth Annual IEEE Applied Power Electronics Conference and Exposition, Austin, TX, USA, 6–10 March 2005; pp. 1288–1292. [Google Scholar]
- Ouyang, Y.; He, J.; Hu, J.; Wang, S.X. A current sensor based on the giant magnetoresistance effect: Design and potential smart grid applications. Sensors 2012, 12, 15520–15541. [Google Scholar] [CrossRef] [PubMed]
- Olson, E.R.; Lorenz, R.D. Integrating Giant Magnetoresistive Current and Thermal Sensors in Power Electronic Modules. In Proceedings of the Eighteenth Annual IEEE Applied Power Electronics Conference and Exposition, Miami Beach, FL, USA, USA, 9–13 February 2003; pp. 773–777. [Google Scholar]
- Popovic, R.S.; Drljaca, P.M.; Kejik, P. CMOS magnetic sensors with integrated ferromagnetic parts. Sens. Actuators A 2005, 94–99. [Google Scholar] [CrossRef]
- Jobling, D. Advances in ASICs for Open Loop Hall-Effect Based Current Transdusers. Available online: https://www.lem.com/images/stories/files/model_files/HO/advances_in_asics_for_ol_hall_effect_cu-rrent_transducers.pdf (accessed on 20 May 2018).
- Yatchev, I.; Sen, M.; Balabozov, I.; Kostov, I. Modelling of a Hall effect-based current sensor with an open core magnetic concentrator. Sensors 2018, 18, 1260. [Google Scholar] [CrossRef] [PubMed]
- Heidari, H.; Bonizzoni, E.; Gatti, U.; Maloberti, F.; Dahiya, R. Optimal geometry of CMOS voltage-mode and current-mode vertical magnetic hall sensors. In Proceedings of the 2015 IEEE SENSORS, Busan, Korea, 1–4 November 2015. [Google Scholar]
- Rushmer, R.; Annis, J.; Marasch, R.; Voborsky, G. Hall Effect Sensor Core with Multiple Air Gaps. U.S. Patent 9,285,437, 15 March 2016. [Google Scholar]
- Zubia, J.; Casado, L.; Aldabaldetreku, G.; Montero, A.; Zubia, E.; Durana, G. Design and development of a low-cost optical current sensor. Sensors 2013, 13, 13584–13595. [Google Scholar] [CrossRef] [PubMed]
- Imamura, M.; Nakahara, M.; Yamaguchi, T.; Tamura, S. Analysis of magnetic fields due to three-phase bus bar currents for design of an optical current transformer. IEEE Trans. Magn. 1998, 34, 2274–2279. [Google Scholar] [CrossRef]
- Imamura, M.; Tokubuchi, M. Magnetic fields analysis for the optical current-transformer used for three-phase bus-bars arranged longitudinally. IEEE Trans. Magn. 1996, 32, 4962–4964. [Google Scholar] [CrossRef]
- Kim, H.; Kang, G.; Nam, D. Coreless Hall current sensor for automotive inverters decoupling cross-coupled field. J. Power Electron. 2009, 9, 68–73. [Google Scholar]
- Zhang, M.; Or, S.W. Gradient-type magnetoelectric current sensor with strong multisource noise suppression. Sensors 2018, 18, 588. [Google Scholar] [CrossRef] [PubMed]
- Allegro ACS70331 Datasheet. Available online: https://www.allegromicro.com/en/Products-/Current-Sensor-ICs/Zero-To-Fifty-Amp-Integrated-Conductor-Sensor-ICs/ACS70331.aspx (accessed on 20 May 2018).
- George, N.; Gopalakrishna, S. An improved anti-differential configuration based hall-effect current sensor. In Proceedings of the 2016 IEEE Annual India Conference (INDICON), Bangalore, India, 16–18 December 2016; pp. 1–5. [Google Scholar]
- Ibrahim, M.E.; Abd-Elhady, A.M. Differential reconstruction method for power frequency AC current measurement using Rogowski coil. IEEE Sens. J. 2016, 16, 8420–8425. [Google Scholar] [CrossRef]
- Singh, R.P. Giant Magneto Resistive (GMR) Effect Based Current Sensing Technique for Low Voltage/High Current Voltage Regulator Modules. IEEE Trans. Power Electron. 2007, 23, 915–925. [Google Scholar] [CrossRef]
- McNeill, N. Low-cost high-bandwidth current transducer for automotive applications. IEEE Trans. Power Electron. 2006, 21, 832–835. [Google Scholar] [CrossRef]
- Goldberg, C.; Davis, R.E. New galvanomagnetic effect. Phys. Rev. J. 1954, 94, 1121–1124. [Google Scholar] [CrossRef]
- Frick, V.; Hebrard, L.; Poure, P.; Anstotz, F.; Braun, F. CMOS microsystem for AC current measurement with galvanic isolation. IEEE Sens. J. 2003, 3, 752–760. [Google Scholar] [CrossRef]
- Oh, S.; Patil, P.B.; Hung, T.Q.; Lim, B.; Takahashi, M.; Kim, D.Y.; Kim, C. Hybrid AMR/PHR ring sensor. Solid State Commun. 2011, 151, 1248–1251. [Google Scholar] [CrossRef]
- Mosser, V.; Matringe, N.; Haddab, Y. A spinning current circuit for Hall measurements down to the nanotesla range. IEEE Trans. Instrum. Meas. 2017, 66, 637–650. [Google Scholar] [CrossRef]
- Wu, R.; Makinwa, K.A.A.; Huijsing, J.H. A chopper current-feedback instrumentation amplifier with a 1 mHz 1/f noise cirner and an AC-coupled ripple reduction loop. IEEE J. Solid-State Circuits 2009, 44, 3232–3243. [Google Scholar] [CrossRef]
- Kim, M.G.; Hanumolu, P.K.; Moon, U. A 10 MS/s 11-bit 0.19 mm2 algorithmic ADC with improved clocking scheme. IEEE J. Solid-State Circuits 2009, 44, 2348–2355. [Google Scholar] [CrossRef]
- DHAB S/160 Specification. Available online: https://www.lem.com/sites/default/files/products_datasheets/dhab_s_160_pub-lic_datasheet.pdf (accessed on 20 May 2018).
- TLI4970 Datasheet. Available online: https://www.infineon.com/dgdl/Infineon-TLI4970-D025T4-DS-v01_01-EN.pdf?fileId-=5546d4625607bd1301562bdf09d8339f (accessed on 20 May 2018).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Specification |
|---|---|
| Current-to-magnetic field coefficient | 7.5 G/A |
| Sensitivity of differential PHR sensor | 1.6 mV/G |
| Input referred noise of read-out IC (ROIC) | 24 nV/ |
| Input referred noise at ROIC for signal bandwidth | 2.4 μV (Bandwidth = 10 kHz) |
| Voltage gain of front-end amplifier | 30 dB |
| Achievable maximum sensed signal at analog-to-digital converter (ADC) | 360 mV |
| ADC dynamic range (Signal-to-Noise Ratio) | 70 dB |
| Current Consumption | 4 mA @3.3 V |
| DHAB S/160 [29] | TLI4970 [30] | ACS70331 [18] | This Work | |
|---|---|---|---|---|
| Structure | Current transducer | Open-type (Differential) | Open-type (Differential) | Open-type (Differential) |
| Magnetic sensor | Hall | Hall | GMR | PHR |
| Measuring current | 30 A | 25 A | 2.5 A | ±1.2 A |
| Sensitivity | 40 mV/A | 12.5 mA/LSB (13 bit) | 800 mV/A | 1.2 mA/LSB (12 bit) |
| Nonlinearity | 3.3% | 1% | 2.0% | 0.5% |
| Bias voltage | 5 V | 3.3 V | 3.3 V | 3.3 V |
| Switching frequency | - | - | - | 100 kHz |
| Current consumption | 15 mA | mA | mA | 4 mA |
| Power consumption | 75 mW | 40 mW | 14.9 mW | 13 mW |
| Resolution | 62.5 mA | 12. 5 mA | 5 mA | 5 mA |
| Output type | Analog | Digital | Analog | Digital |
| Size (Chip Size) | Large (52 mm × 34 mm) | Small (7 mm × 7 mm) | Small (3 mm × 3 mm) | Small (5 mm × 5 mm) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Hong, S.; Park, W.; Kim, W.; Lee, J.; Shin, K.; Kim, C.-G.; Lee, D. High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor. Sensors 2018, 18, 2231. https://doi.org/10.3390/s18072231
Lee S, Hong S, Park W, Kim W, Lee J, Shin K, Kim C-G, Lee D. High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor. Sensors. 2018; 18(7):2231. https://doi.org/10.3390/s18072231
Chicago/Turabian StyleLee, Sungho, Sungmin Hong, Wonki Park, Wonhyo Kim, Jaehoon Lee, Kwangho Shin, Cheol-Gi Kim, and Daesung Lee. 2018. "High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor" Sensors 18, no. 7: 2231. https://doi.org/10.3390/s18072231
APA StyleLee, S., Hong, S., Park, W., Kim, W., Lee, J., Shin, K., Kim, C.-G., & Lee, D. (2018). High Accuracy Open-Type Current Sensor with a Differential Planar Hall Resistive Sensor. Sensors, 18(7), 2231. https://doi.org/10.3390/s18072231