Low Cost Photonic Sensor for in-Line Oil Quality Monitoring: Methodological Development Process towards Uncertainty Mitigation

Abstract
1. Introduction
1.1. Lubricant Quality Parameters and Sensors
- Acid Number (AN), is a measurement of oil acidity and it is considered a key indicator that may reflects oil quality deterioration due to chemical reactions, oxidation, incorrect oils, additive depletion and contamination. ASTM (American Society for Testing and Materials) D974 and ASTM D664 methods are the current industry standard methods for measuring the acid number [27,28,29].
- Remaining Useful Life Evaluation Routine (RULER) by Linear Sweep Voltammetry is a test method to determine the remaining useful life of oil by measuring remaining antioxidant additives. These additives are responsible for slowing down the oil degradation process, and therefore remaining additives level may indicate the oil degradation condition. ASTM D6971 and ASTM D6810 are approved test methods specified by ASTM [30,31].
- Fourier Transform Infrared Spectroscopy (FTIR) evaluates the oil’s components at a molecular level. The spectrum is used as a fingerprint of various components and it is compared with fresh oil reference. High concentrations of degradation products, such as oxidation, nitration, and sulphation, and low concentrations of oxidation inhibitors indicate oil degradation. However, FTIR interpretation is complex and some additive components usually mask the critical antioxidant region. The ASTM E2412 test method is the approved standard practice for lubricants condition monitoring by FTIR spectrometry specified by ASTM [32].
- Viscosity. Lubricants need to have a specific viscosity to give correct operation in the equipment where they are being used. Viscosity change as the oil oxidizes, whereby this is an important parameter to measure when the oil condition is evaluated. ASTM D445 the standard test method for viscosity approved by ASTM [33].
- ASTM Color Scale (ASTM D500), is a method that visually determines the colour of petroleum products such as lubricating oils, waxes, and diesel fuel oils. If the colour range of a specific oil is known, a variation outside this may indicate contamination. Colour can also be used as an indication of the degree of refinement of the material [34].
- Membrane Patch Colorimetry (MPC) is a method for analysing the insoluble contaminants in lubricants with spectral analysis. With MPC, a direct correlation is made from the colour and intensity of the insoluble to lubricant oil degradation. The method identifies soft contaminants, which are directly associated with oil degradation. Larger hard contaminants unrelated to oil degradation do not influence the test results much. ASTM D7843 is the approved standard test methods specified by ASTM [35,36].
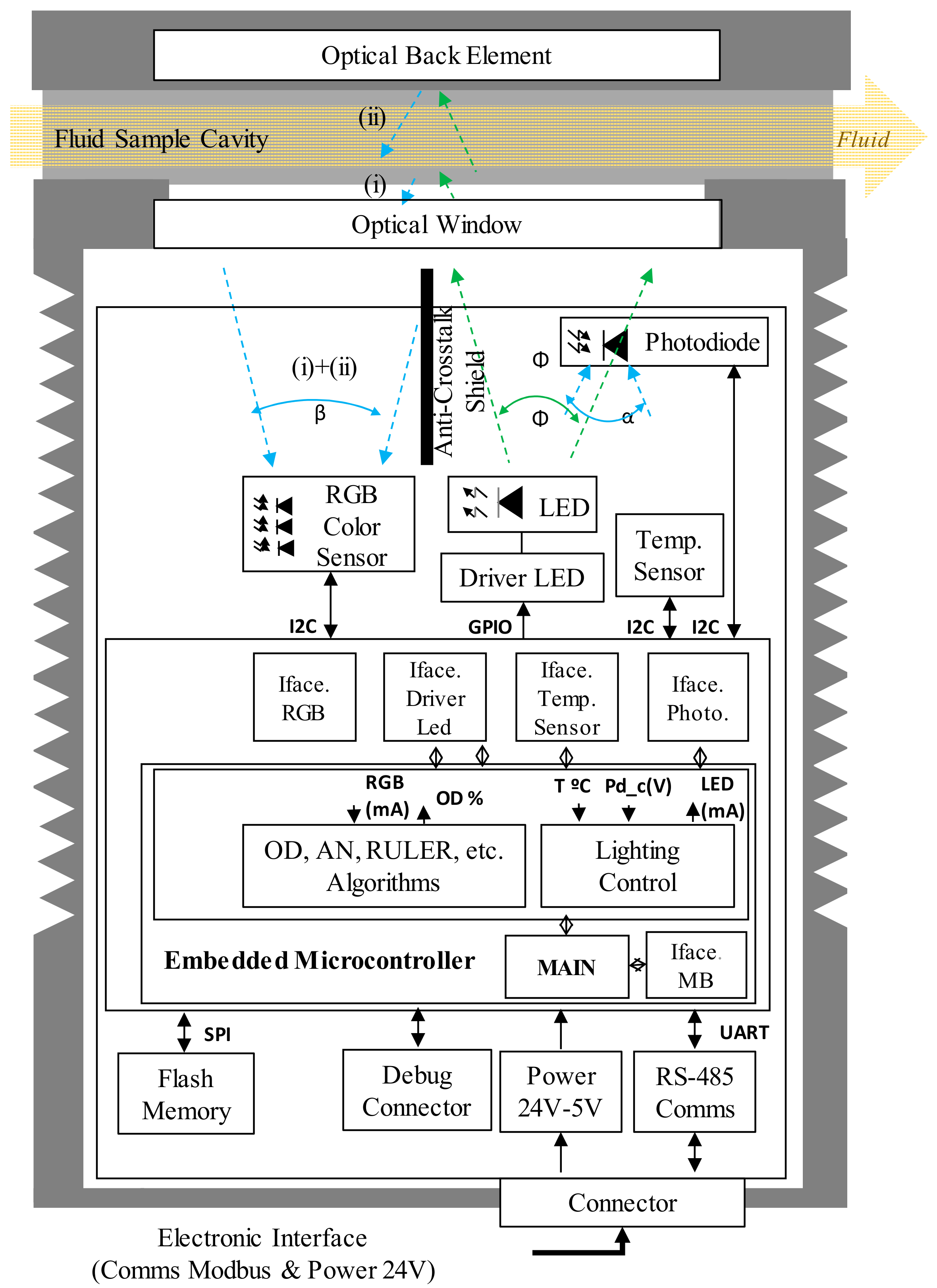
1.2. Transmittance and Diffuse Reflectance Measurement Principle
- Required optomechanical accuracy for optical elements is minimum.
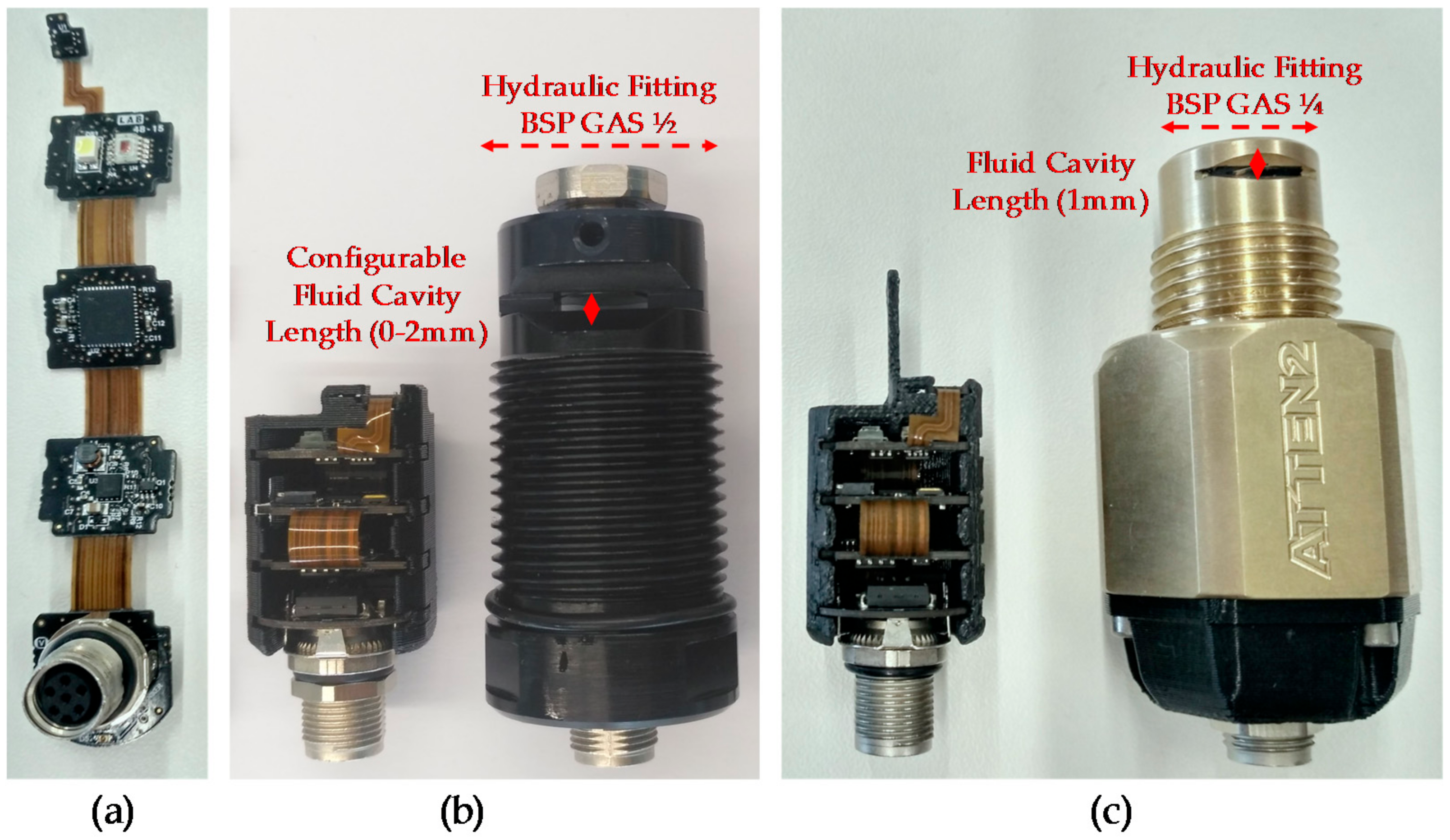
- Fluidical-Mechanical subsystem redesign allows the sensor to operate directly immersed in the fluid, avoiding the necessity of a hydraulic conditioning subsystem required for a hydraulic bypass connection.
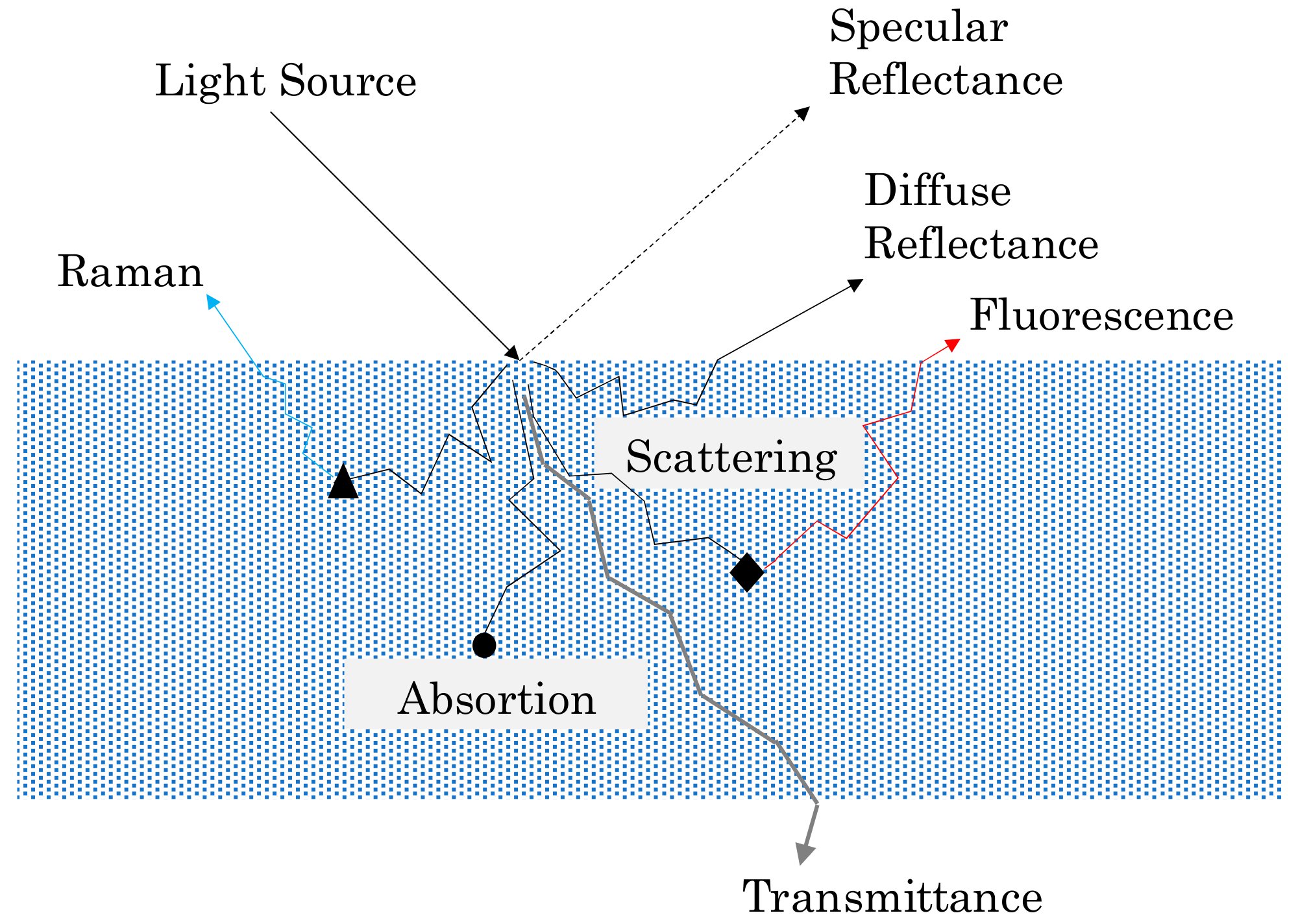
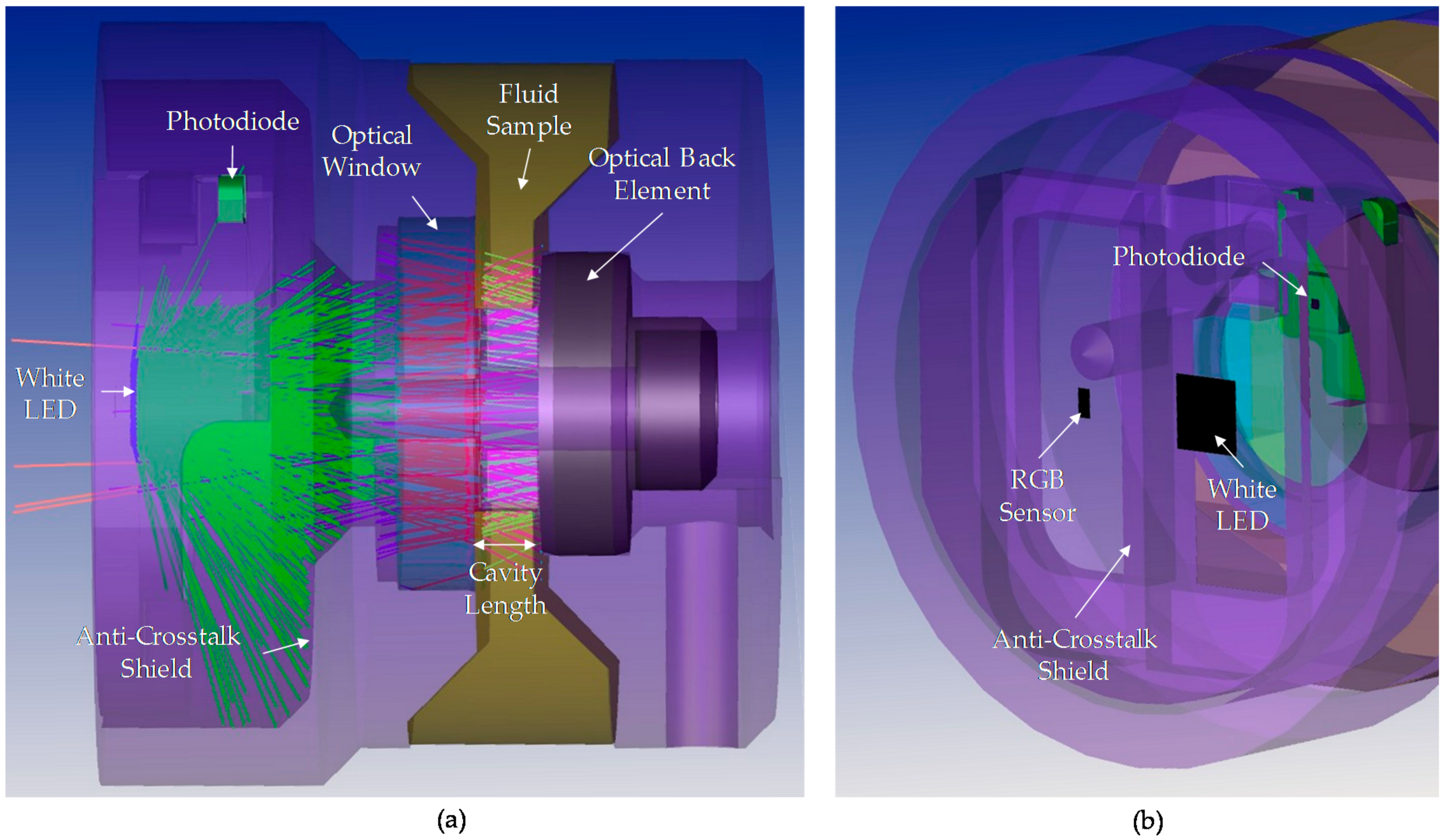
- Although both transmittance and reflectance approaches (see Figure 4) are conducted in the visible spectrum and the light that is not absorbed by the oil is collected by the detector, the light and fluid interaction process differ. This difference makes it impossible to determine at the beginning of the development the RGB absorbance measurement dynamic range that can be achieved with the proposed optical configuration. The RGB dynamic range is the key element of the development since it is directly related to the sensor’s oil degradation measurement resolution and the compatibility with different oil types that could be measured.
- The dependence between the temperature and some optical elements, such as, light emitters, receivers, etc., is known. For example, the white LEDs lose luminous intensity as temperature increases. Although the manufacturers of the optical elements provide this efficiency versus temperature dependency, the real impact of this effect in the RGB light absorbance measurement is uncertain. It is necessary to precisely analyse this dependency and guarantee light source stability since uncontrolled variations in the RGB light absorbance measurement can lead to an erroneous oil quality value.
- As the sensor operates immersed in the fluid, the filling of the sample cavity and renewal of the oil sample cannot be guaranteed by means of hydraulic actuators. In this context, there is an uncertainty regarding the ability of the fluidical-mechanical sensor design that ensures sample cavity filling, air evacuation and fluid sample renewal considering the different conditions of the sensor installation in the field (e.g., viscosity, temperature and pressure of the fluid). This is also an especially relevant point, because the presence of bubbles in the sample cavity, non-renewal of the oil sample, etc., can lead to an erroneous oil quality value.
2. Materials and Methods
3. Uncertainty Driven Sensor Design
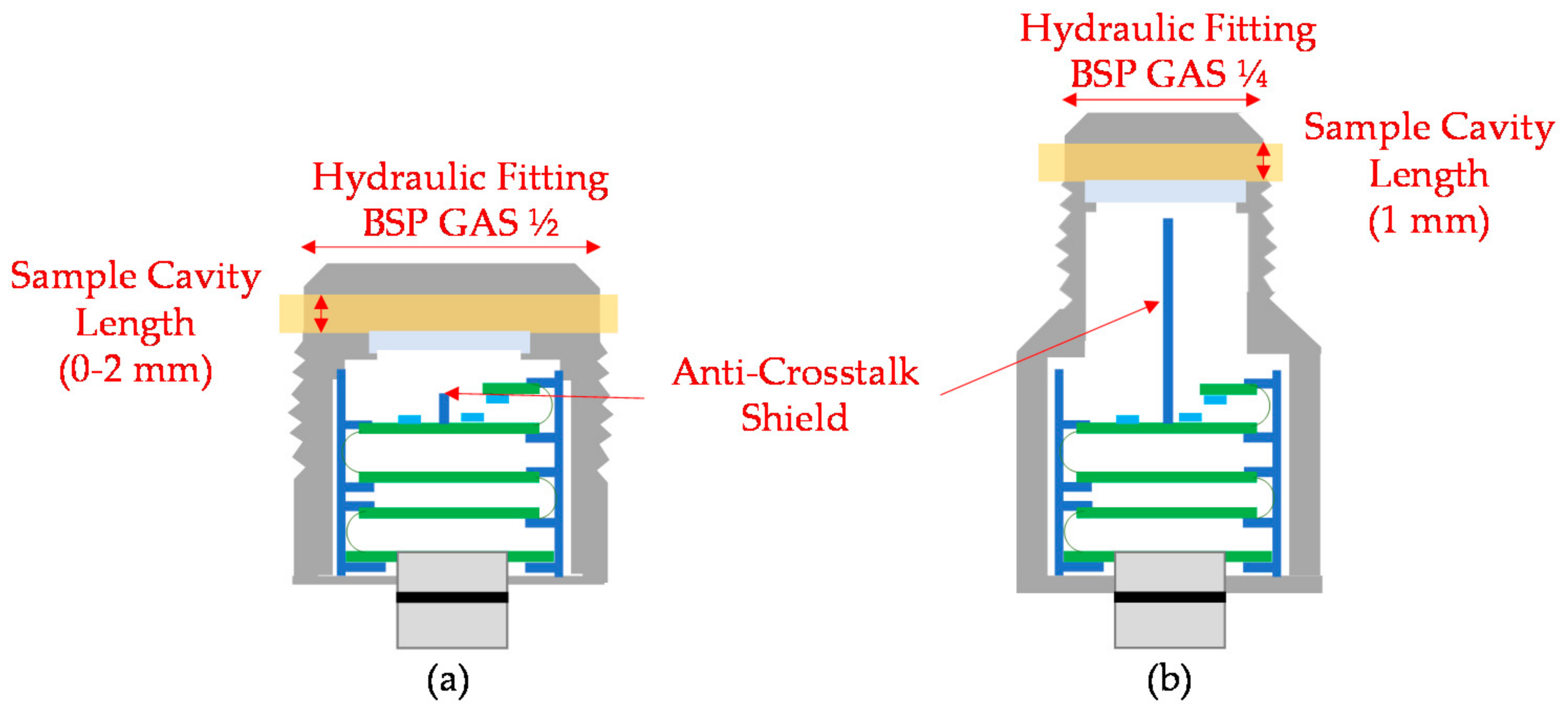
3.1. Sensor General Description and Prototypes
3.2. RGB Measurement Dynamic Range
3.2.1. Theoretical Approach of the Alpha Prototype (Activity 1 of the Activity Plan)
- The RGB colour sensor shows a sensibility of 30, 76 and 94 a.u. count/lx and the peak sensibilities 460 nm, 530 nm, 615 nm for Red, Green and Blue channels respectively, and directivity of 120° approximately.
- The feedback photodiode shows a 0.045 a.u. count/lx sensibility with a directivity of 90°.
- The white LED used as sample illuminator is able to deliver 2800 mcd at 30 mA driving current with a 120° 3 dB viewing angle. The emitter shows a relative luminous intensity of 90%, 65%, 80% at the peak sensibility wavelengths of the RGB photodetector.
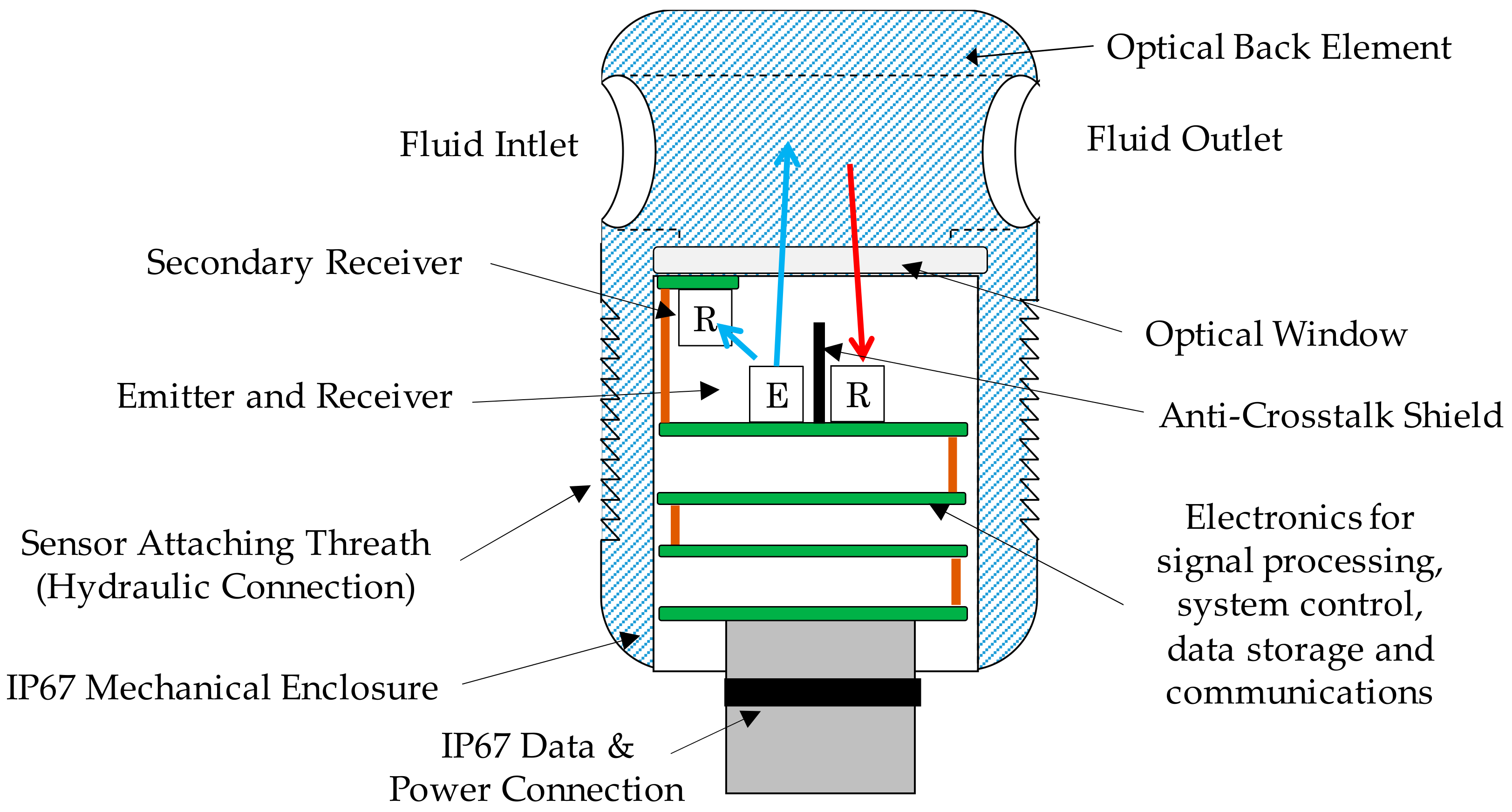
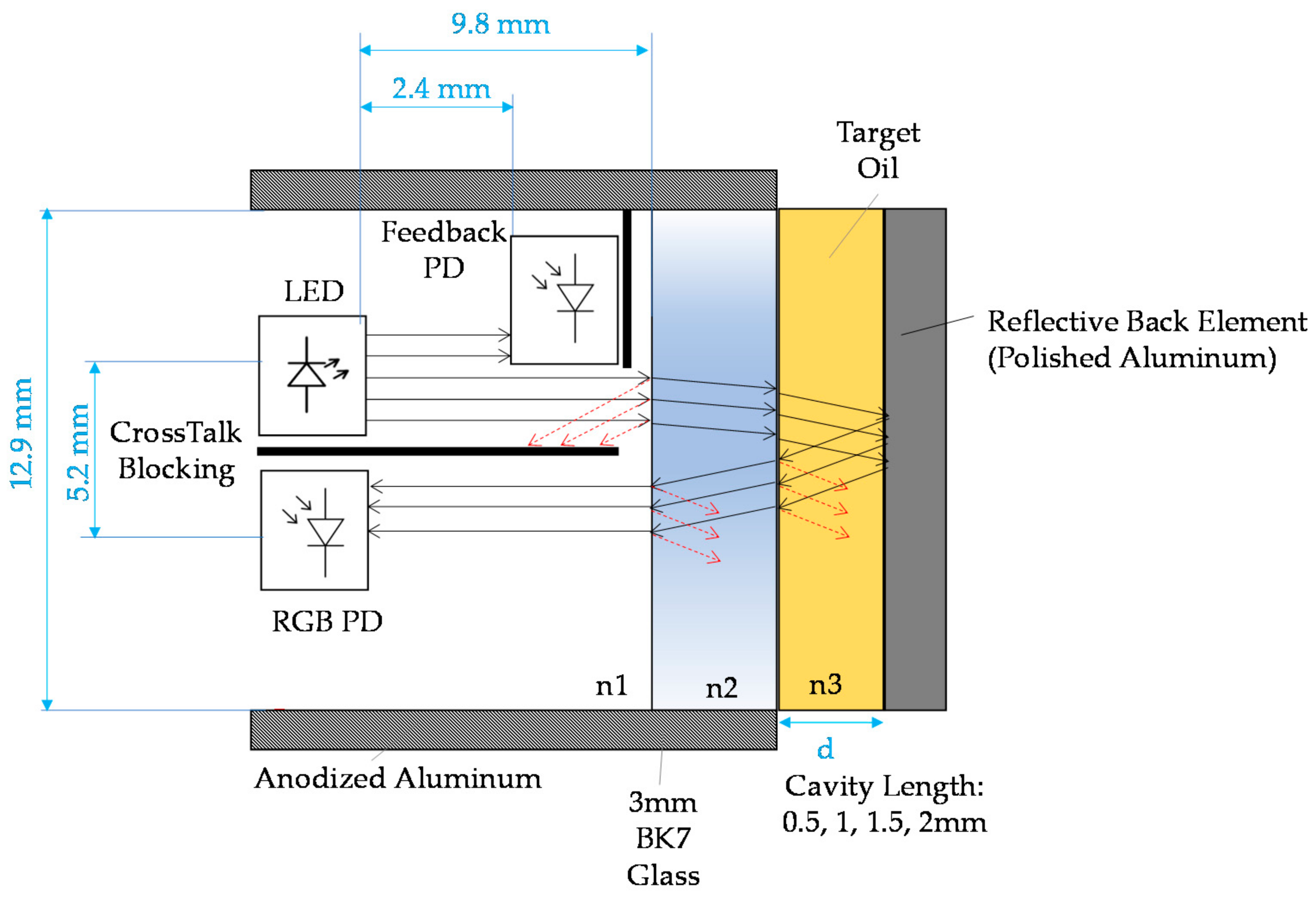
- The construction and optical materials include: anodized aluminium for sensor body parts, which could be considered fully absorbent in the visible range, and optical back element of polished aluminium with an almost flat reflectance of 90% for visible spectra and BK7 optical window, which displays a transmittance of 99% also in the visible range.
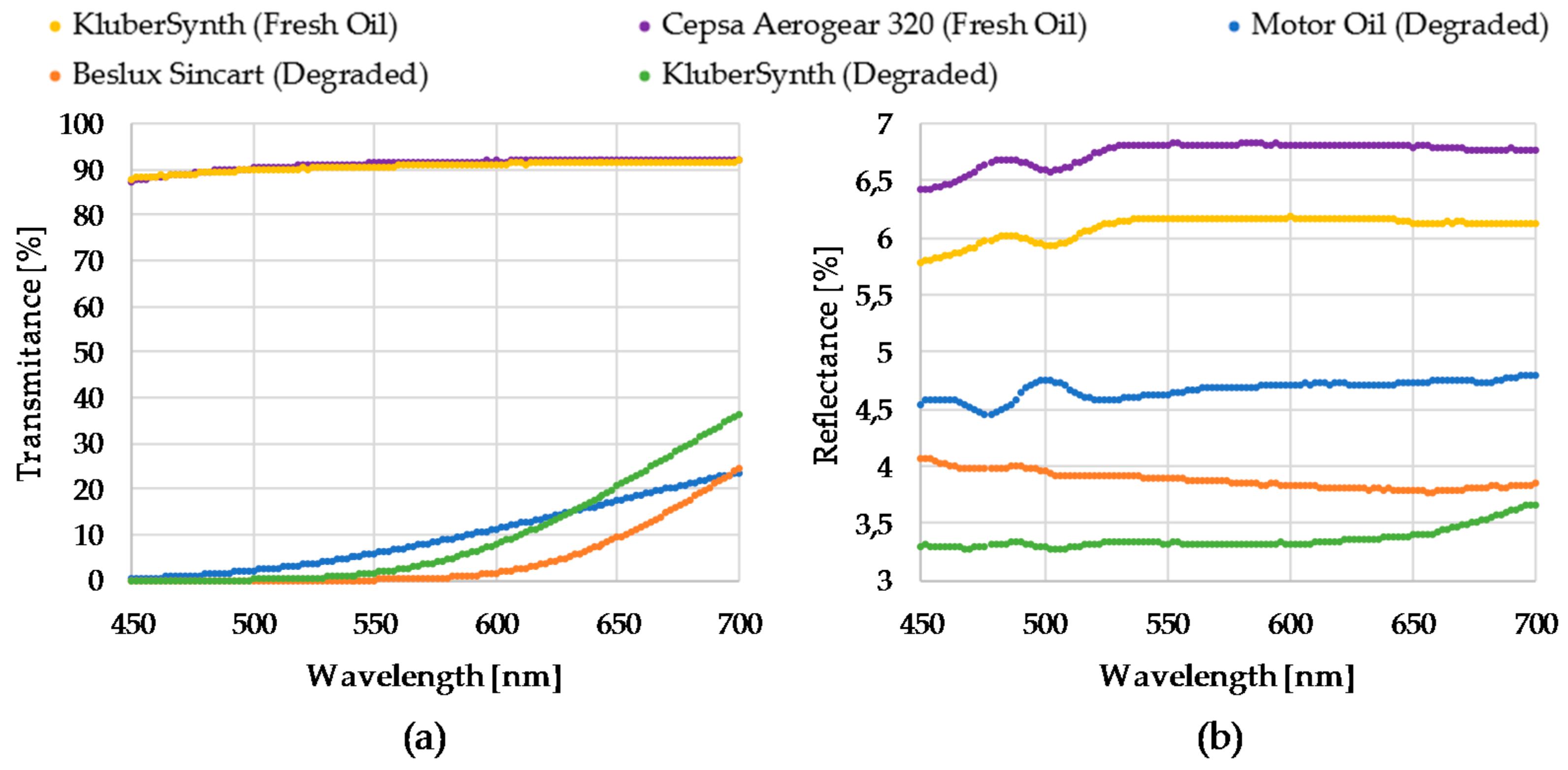
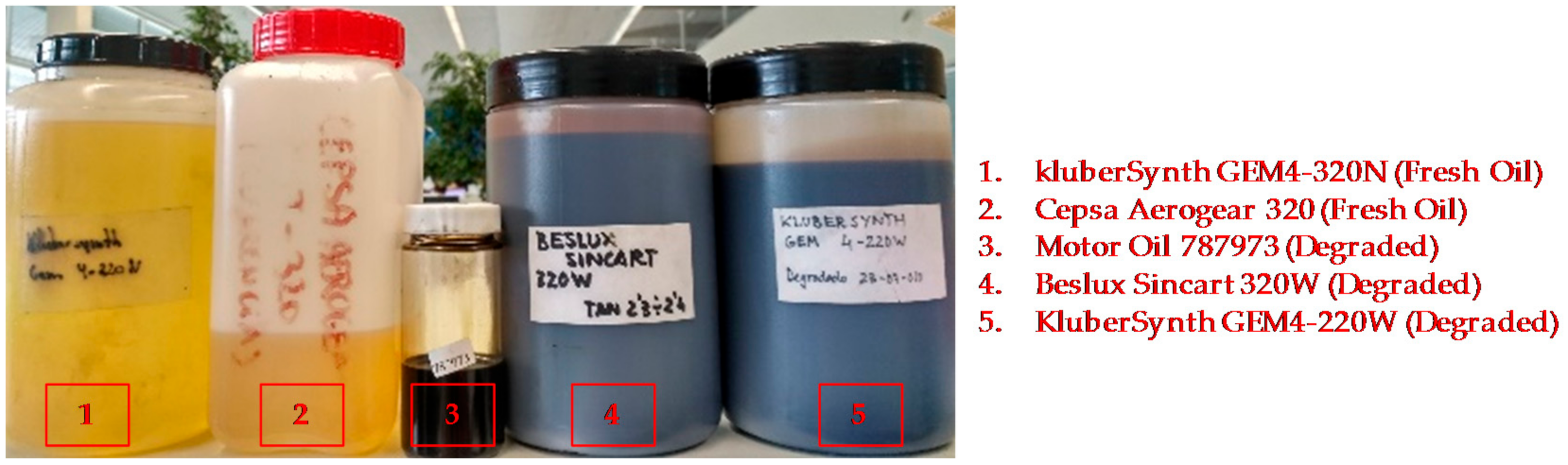
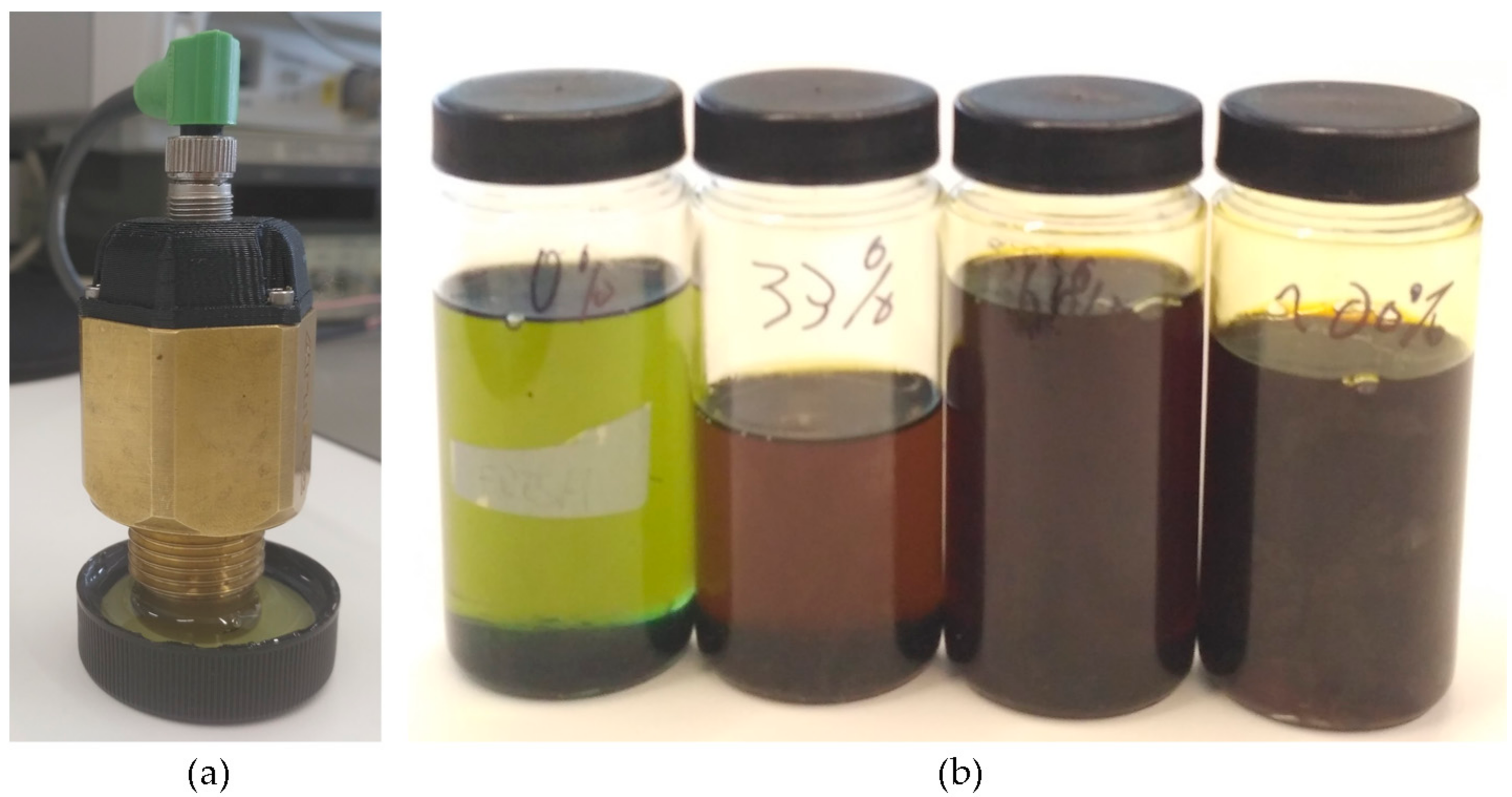
- The light absorption at the oil sample will depend on its absorptivity (ε) and on the sample cavity length (L). Additionally, the total diffuse reflectance is also a parameter dependent on the chemical properties of the sample and on the sample length. Graphs displayed in Figure 11 show the transmittance and reflectance visible-NIR spectral values for different oil samples (see Figure 12) at different degradation status, measured with a laboratory equipment (LAMBDA 850 UV/Vis Spectrophotometer, Perkin Elmer, Waltham, MA, USA) using a 1 mm cuvette for the oil sample. According to these graphs and applying the Absorbance to Transmittance conversion displayed in equation (1), the absorbance of each sample can be obtained for the central wavelengths of the RGB colour sensor (see Table 5).
- The absorbance coefficient of the air and BK7 glass is negligible.
- The refractive index of the BK7 glass and the fluid sample is negligible.
- The refractive index of the polished aluminium is 90%.
- The absorbances of the target oil for the defined cavity lengths (0.5, 1, 1.5, 2 mm) are calculated by applying the equation (2) to the values listed in Table 5. KluberSynth fresh oil and degraded samples are used, as they cover a complete degradation range.
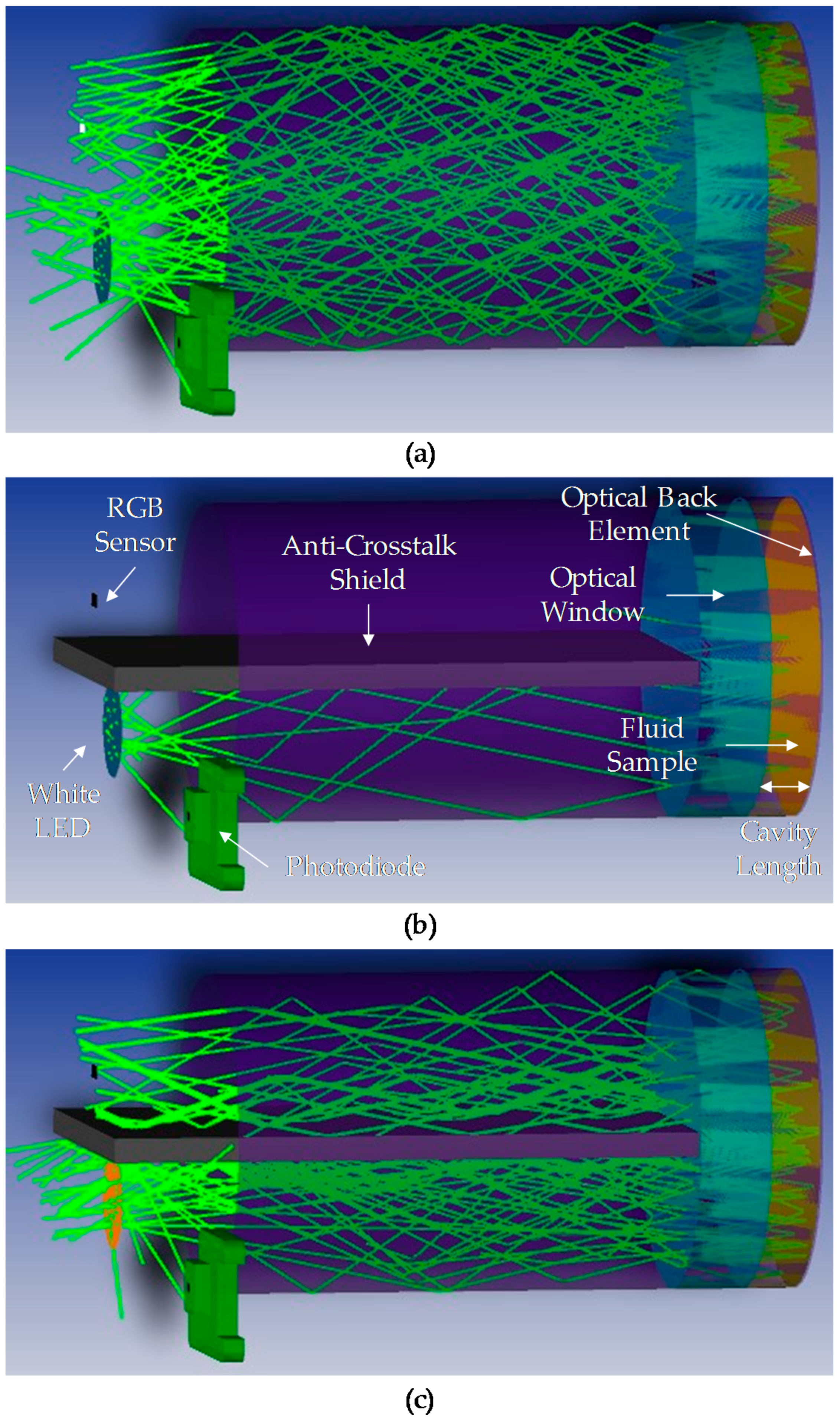
3.2.2. Optical Simulation of the Alpha Prototype (Activity 3 of the Activity Plan)
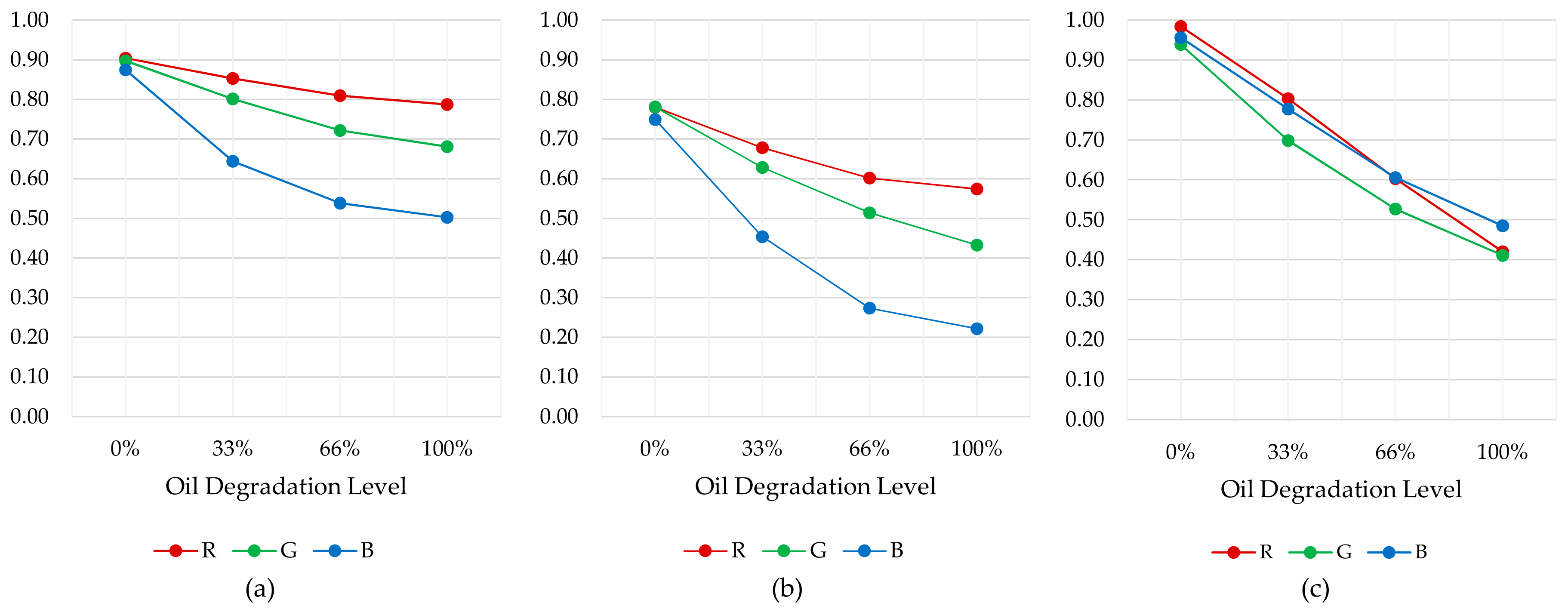
3.2.3. RGB Measurement Tests with Alpha Prototype (Activity 5 of the Activity Plan)
3.2.4. Optical Simulation of Beta Prototype (Activity 8 of the Activity Plan)
3.2.5. RGB Measurement Tests with Beta Prototype (Activity 10 of the Activity Plan)
3.3. RGB Measurement Stability versus Temperature
3.3.1. Theoretical Approach of Alpha Prototype versus Temperature (Activity 2 of the Activity Plan)
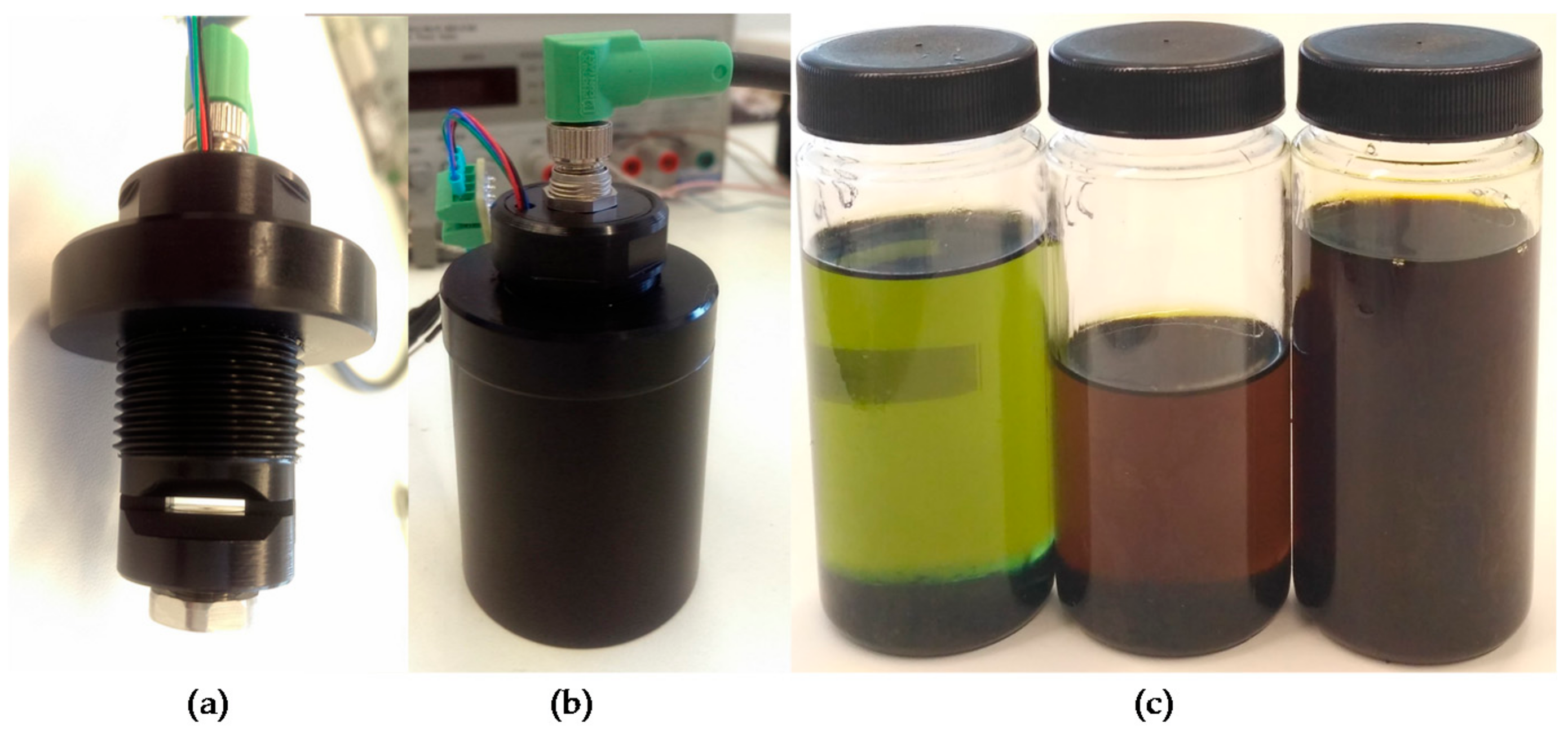
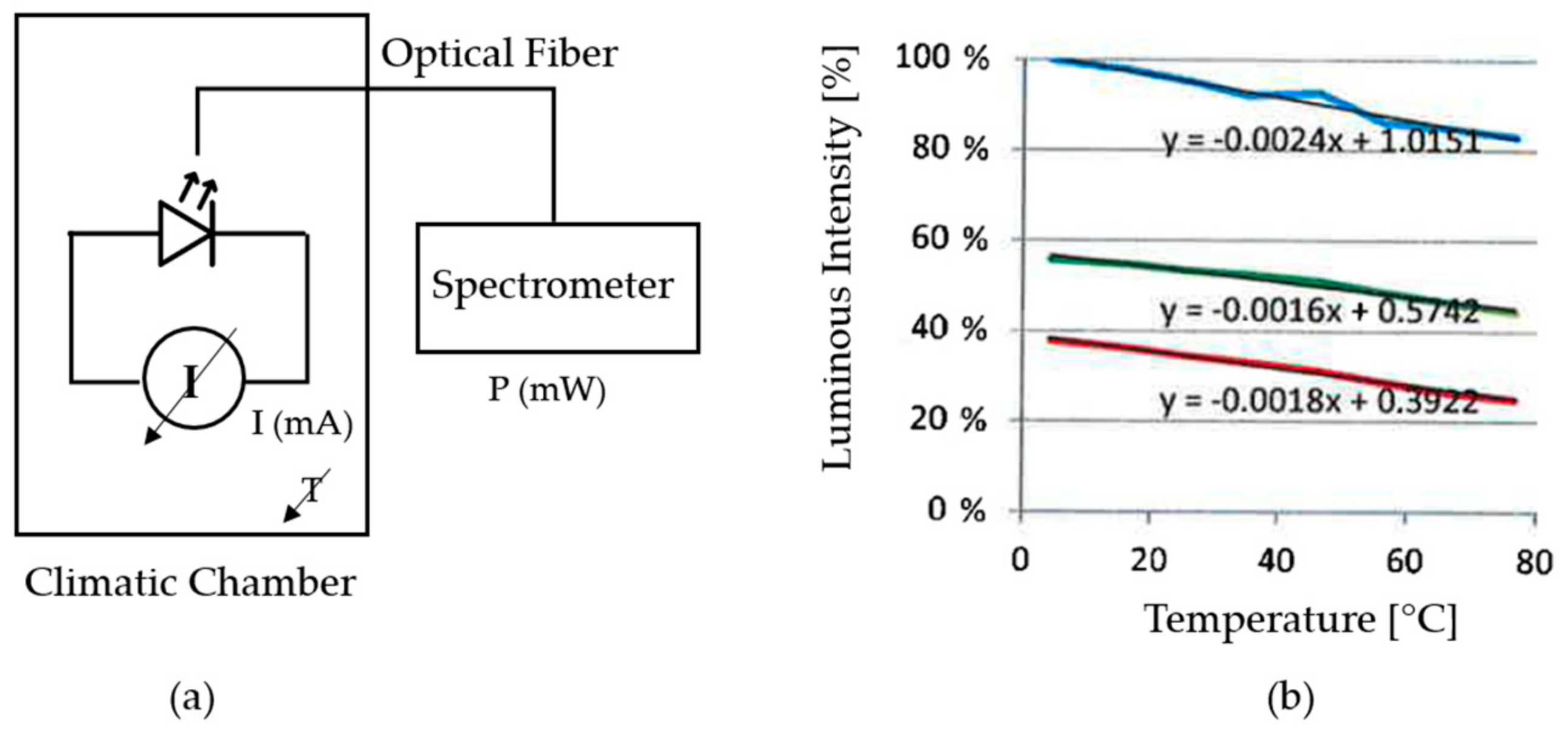
- The dependency between the white LED and the temperature is tested making several measures with the LED in a climatic chamber over a temperature range of 0 °C to 80 °C. To measure the luminous intensity emitted by the LED, it is connected with an optical fiber to a VIS-NIR spectrophotometer (HR-2000+, Ocean Optics, Dunedin, FL, USA) placed outside the climatic chamber (see Figure 20a). Figure 20b shows measured luminous intensity at the wavelengths of the blue, green and red colours. A variation of approximately 20%, 13% and 15% is observed at wavelengths of the colour blue, green and red, respectively, over the tested temperature range.
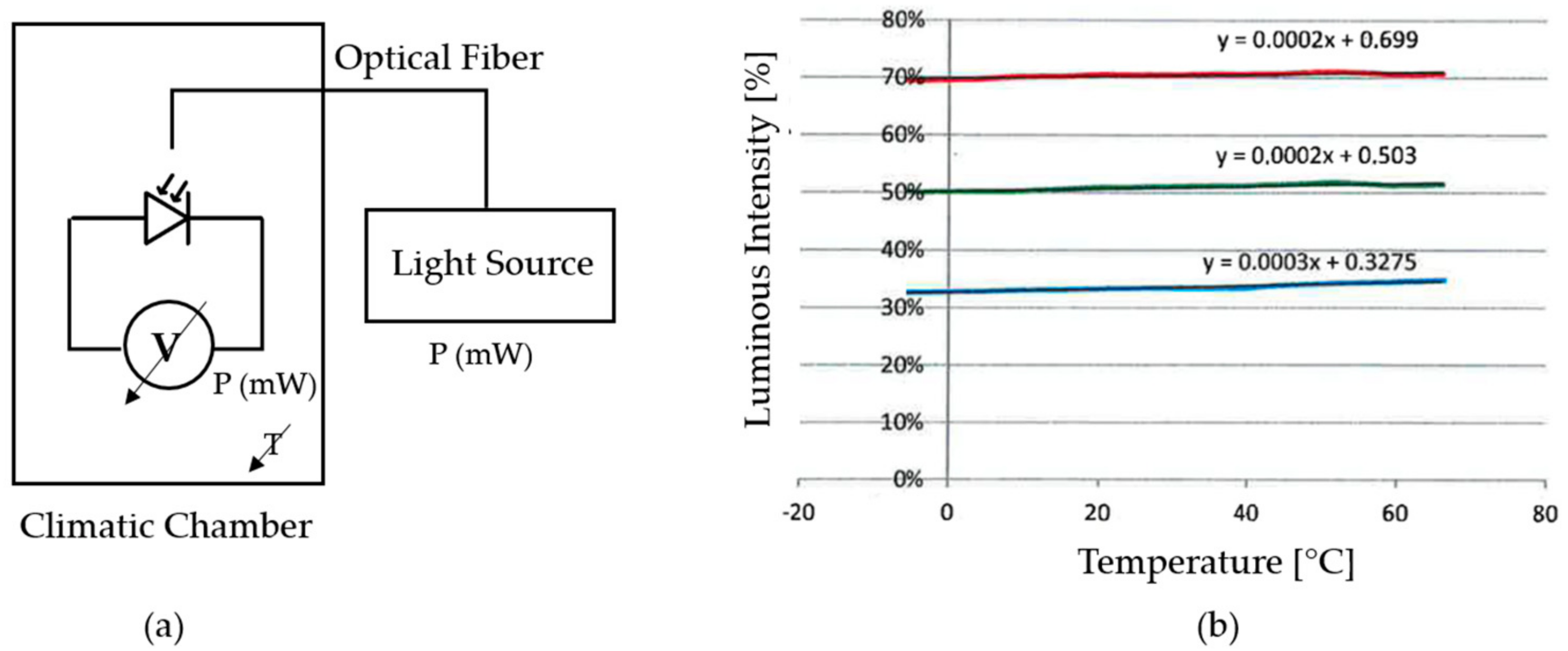
- The dependency between the RGB colour sensor and the temperature is also tested making several measures with the RGB sensor in a climatic chamber over a temperature range of 0 °C to 80 °C. The RGB photodetector is illuminated with a 12 W broadband tungsten-halogen light source (HL-2000, Ocean Optics, Dunedin, FL, USA) placed outside the climatic chamber and connected to the colour sensor with an optical fiber (see Figure 21a). Figure 21 shows the measured luminous intensity at blue, green and red wavelengths. The variation of RGB measurement over the tested temperature range is negligible compared to the results obtained with the white LED.
- “Temperature Coefficient of Voltage Approach” measures the flow-through voltage of the white LED, which combined with the parameter Temperature Coefficient of Voltage allows sensing precisely the junction temperature of the LED, and based on this and the Temperature Coefficient of Efficiency, the referenced system implement an open loop control for maintaining the luminous intensity of the white LED constant [72].
- “Feedback Photodiode Approach” measures the luminous intensity emitted by the white LED with a secondary receiver, such as a photodiode, and based on this value an open control loop is implemented for maintaining the luminous intensity of the white LED constant [73].
3.3.2. Temperature-Dependent RGB Measurement Stability Tests with Alpha Prototype (Activity 6 of the Activity Plan)
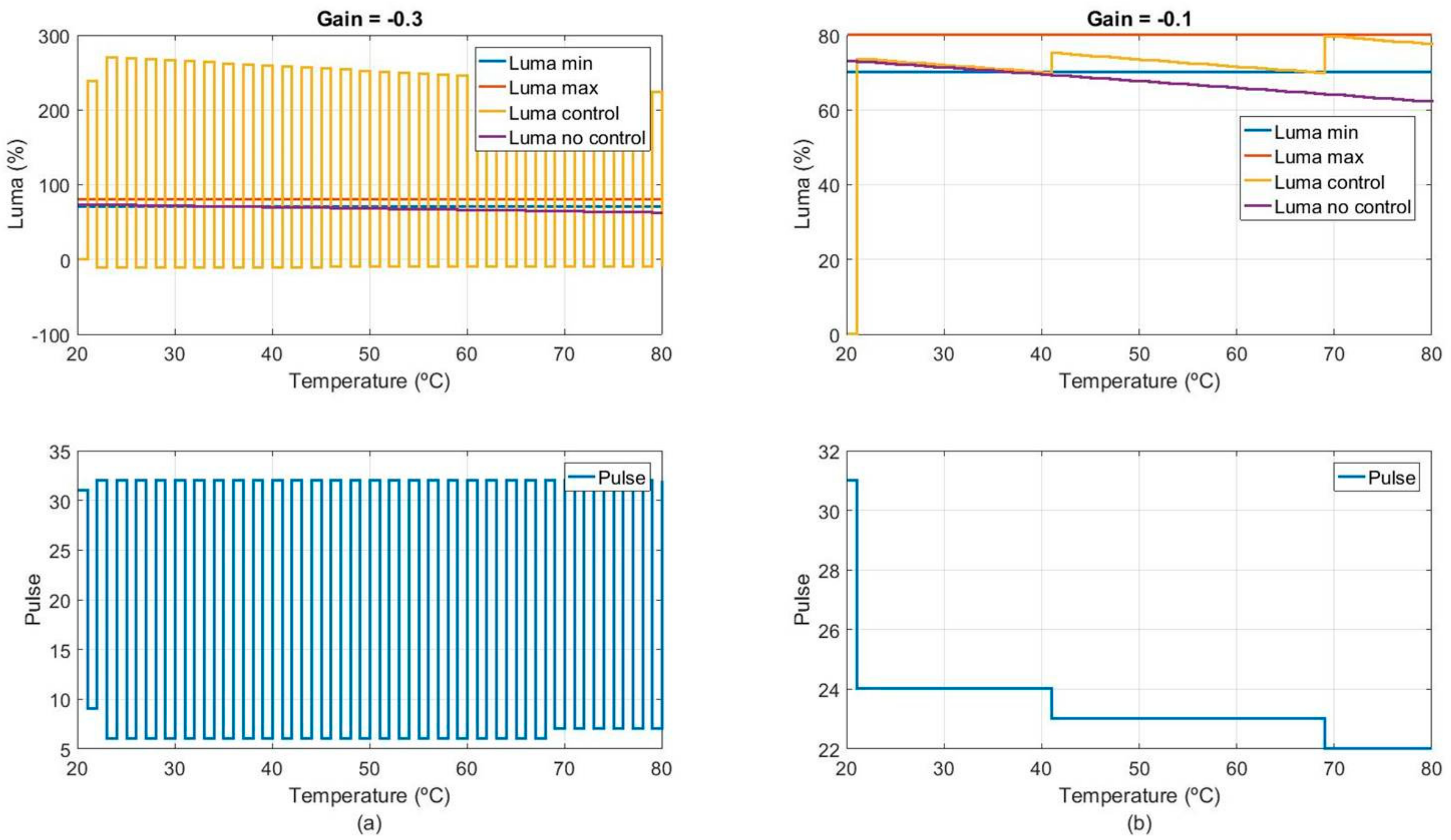
3.3.3. Lighting Control Design and Simulation (Activity 9 of the Activity Plan)
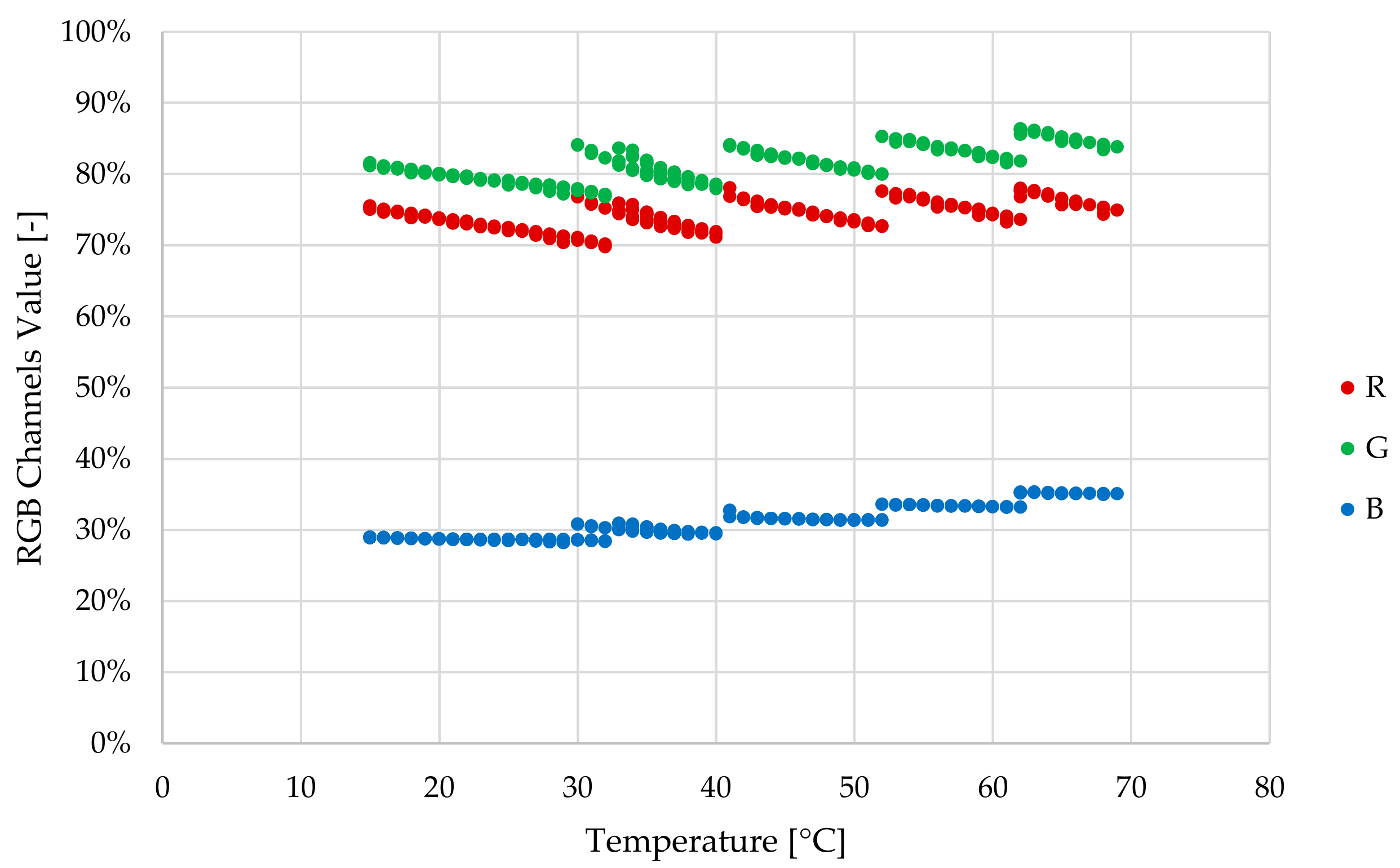
3.3.4. Temperature-Dependent RGB Measurement Tests with Beta Prototype (Activity 11 of the Activity Plan)
3.4. Fluidic Sample Acquisition: Sample Cavity Filling, Air Evacuation and Sample Renewal
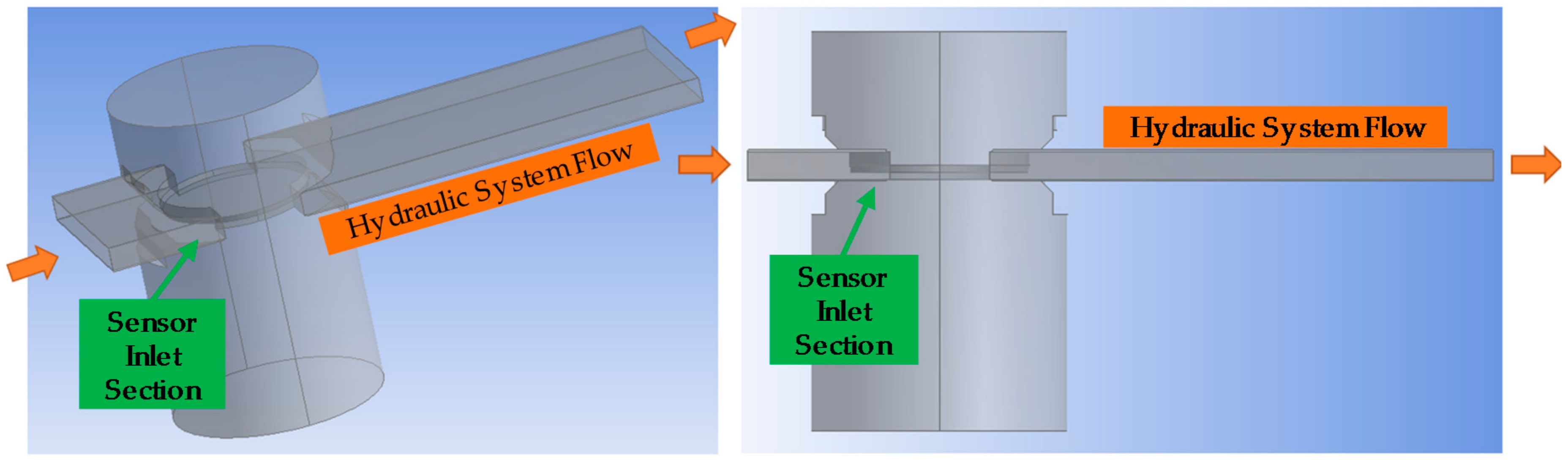
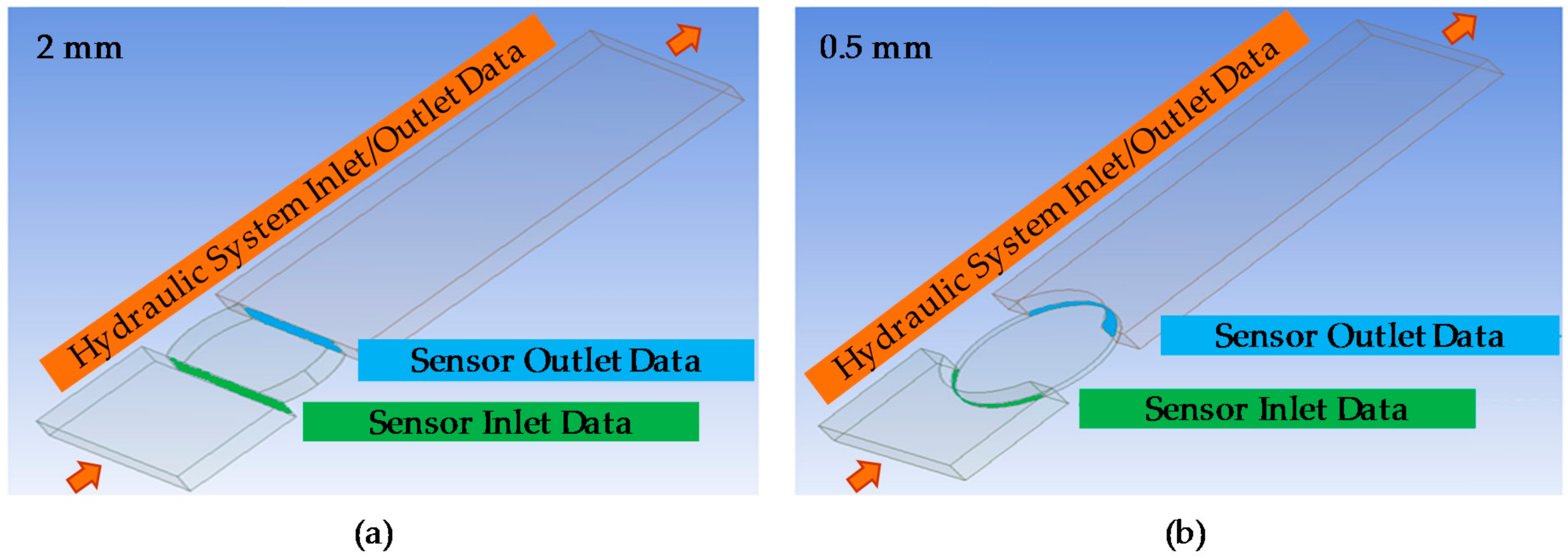
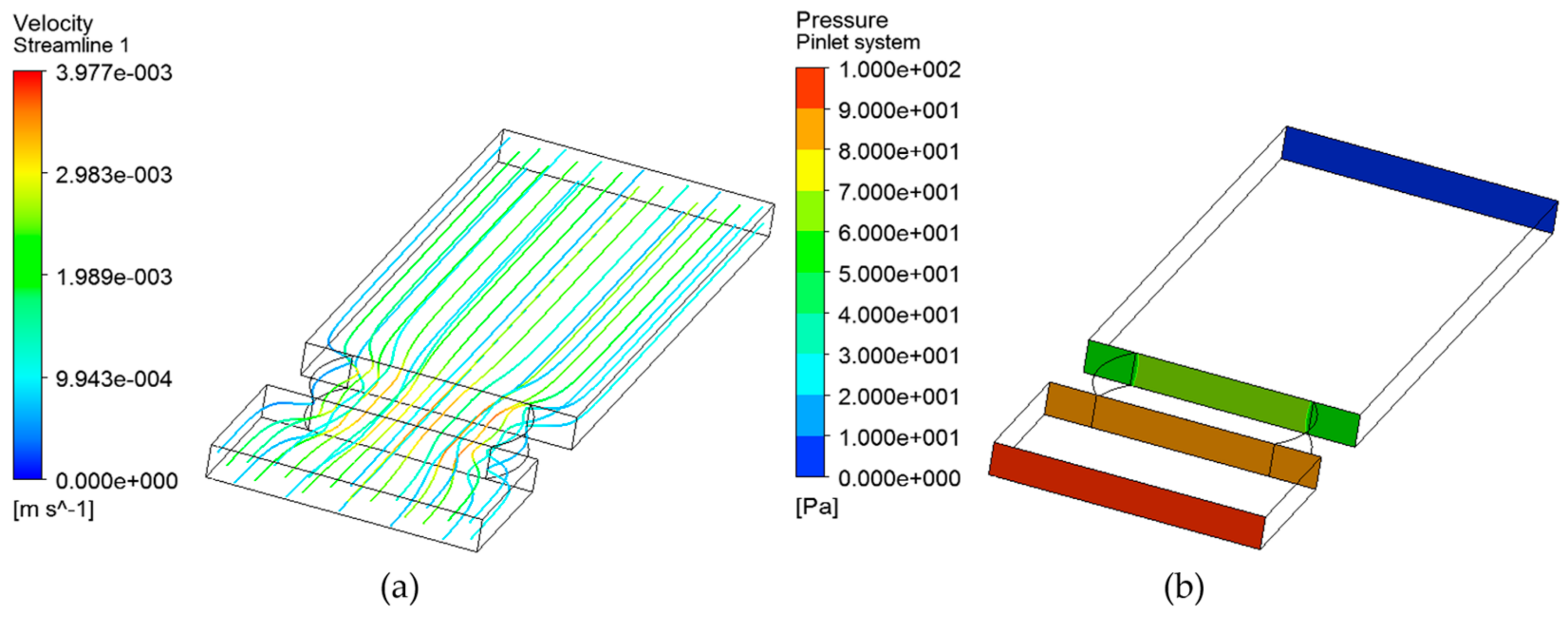
3.4.1. CFD Simulation of Alpha Prototype (Activity 4 of the Activity Plan)
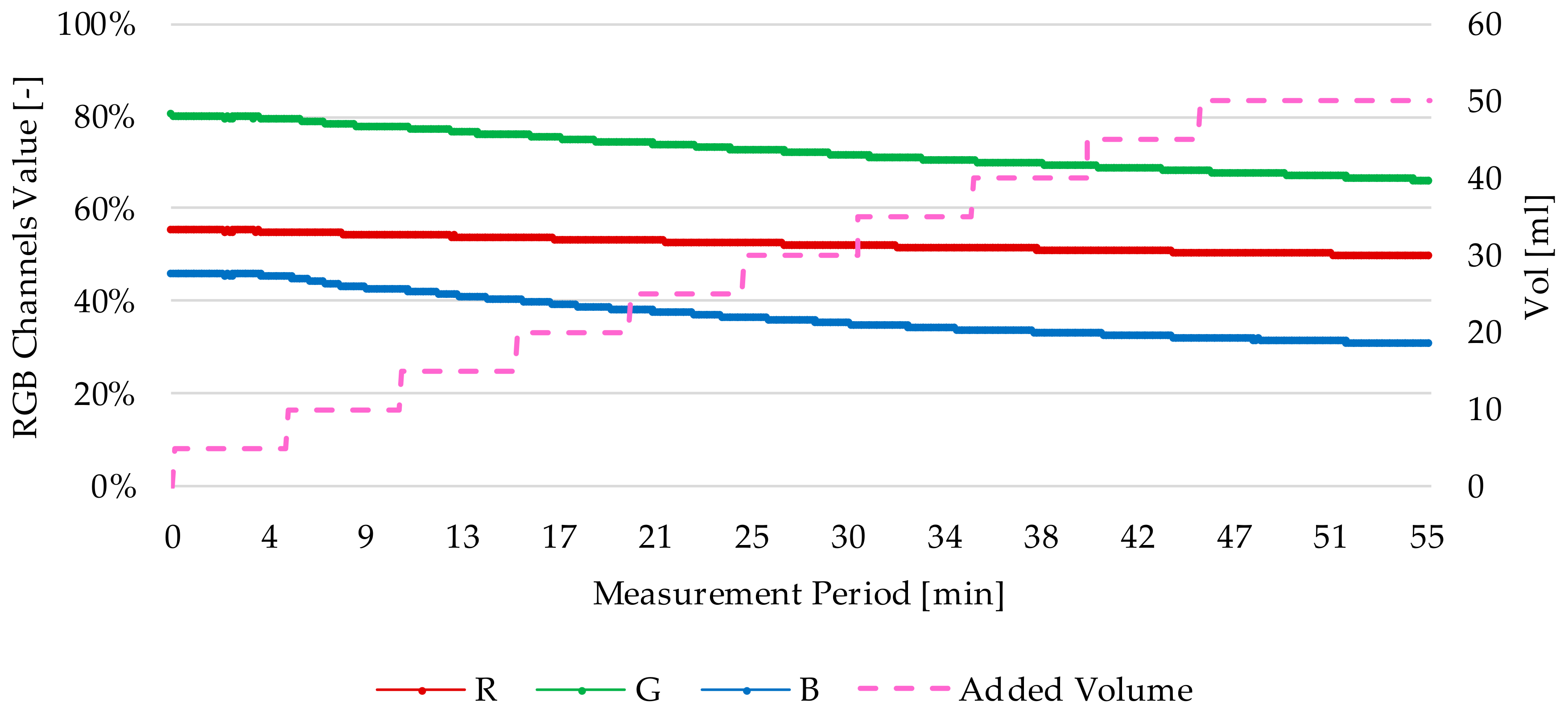
3.4.2. Fluidic (Sample Acquisition) Test with Alpha Prototype (Activity 7 of the Activity Plan)
4. Results and Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Conflicts of Interest
References
- Mang, T.; Dressel, W. Lubricants and Lubrication, 3rd ed.; Jonh Wiley & Sons: Hoboken, NJ, USA, 2017; ISBN 978-3-527-32670-9. [Google Scholar]
- Gómez Estrada, Y.A. Contribución al Desarrollo y Mejora Para la Cuantificación de la Degradación en Aceites Lubricantes Usados de MCIA a Través de la Técnica de Espectrometría Infrarroja por Transformada de Fourier (FT-IR). Ph.D. Thesis, Universitat Politècnica de València, València, Spain, 2013. [Google Scholar] [CrossRef]
- Zeng, Q.; Dong, G.; Yang, Y.; Wu, T. Performance Deterioration Analysis of the Used Gear Oil. Adv. Chem. Eng. Sci. 2016, 6, 67–75. [Google Scholar] [CrossRef]
- Höhn, B.R.; Michaellis, K. Influence of Lubricant Ageing on Gear Performance. Available online: http://www.oetg.at/fileadmin/Dokumente/oetg/Proceedings/WTC_2001_files/html/M-28-02-339-HOEHN.pdf (accessed on 3 May 2018).
- Wright, J. 3 Reasons Why Lube Oils Fail, Machinery Lubrication, August 2011. Available online: http://www.machinerylubrication.com/Read/28526/why-lube-oils-fail (accessed on 3 May 2018).
- Neale, M.J. Lubrication and Reliability Book, 1st ed.; Newness: Oxford, UK, 2000; ISBN 9780750651547. [Google Scholar]
- Richardson, D. Plant Equipment & Maintenance Engineering Handbook; McGraw Hill Professional: New York, NY, USA, 2013; ISBN 9780071809900. [Google Scholar]
- Kopschinsky, J. The True Cost of Poor Lubrication. 2012. Available online: http://www.uesystems.com/wp-content/uploads/2014/10/The-True-Cost-of-Poor-Lubrication.pdf (accessed on 3 May 2018).
- Atten2 Advanced Monitoring Technologies. Available online: http://atten2.com/ (accessed on 3 May 2018).
- Gebarin, S. On-Line and In-Line Wear Debris Detectors: What’s Out There? Machinery Lubrication, September 2003. Available online: http://www.machinerylubrication.com/read/521/in-line-wear-debris-detectors (accessed on 3 May 2018).
- Myshkin, N.K.; Markova, L.V. On-Line Condition Monitoring in Industrial Lubrication and Tribology, 1st ed.; Springer: Cham, Switzerland, 2018; ISBN 978-3-319-61134-1. [Google Scholar]
- Tokognon, C.A.; Gao, B.; Tian, G.Y. Structural health monitoring framework based on Internet of Things: A survey. IEEE Internet Things J. 2017, 4, 619–635. [Google Scholar] [CrossRef]
- Parpala, R.; Iacob, R. Application of IoT concept on predictive maintenance of industrial equipment. MATEC Web Conf. 2017, 121, 02008. [Google Scholar] [CrossRef]
- Los Sensors: Herramientas Clave Para el Desarrollo del ‘Big-Data’ (Sensor: Key Tools for the Development of Big Data). Available online: http://www.spri.eus/es/ris3-euskadi-comunicacion/los-sensores-herramientas-clave-desarrollo-del-big-data/ (accessed on 11 May 2018).
- Lee, J.; Bagheri, B.; Kao, H.A. A Cyber-Physical Systems architecture for Industry 4.0-based manufacturing systems. Manuf. Lett. 2015, 3, 18–23. [Google Scholar] [CrossRef]
- Siemens and General Electric Gear up for the Internet of Things, The Economist, December 2016. Available online: https://www.economist.com/news/business/21711079-american-industrial-giant-sprinting-towards-its-goal-german-firm-taking-more (accessed on 3 May 2018).
- Intelligent Sensor Systems for Industry 4.0, Press Release, Bosch Group. 2016. Available online: http://www.bosch-presse.de/pressportal/de/en/intelligent-sensor-systems-for-industry-4-0-44893.html (accessed on 3 May 2018).
- Machine Monitoring with Smart Sensors, Press Release, Bosch Group. 2016. Available online: http://www.bosch-presse.de/pressportal/de/en/machine-monitoring-with-smart-sensors-44917.html (accessed on 3 May 2018).
- Gresham, R.M.; Totten, G.E. Lubrication and Maintenance of Industrial Machinery: Best Practices and Reliability; CRC Press: Boca Raton, FL, USA, 2008; ISBN 9781420089363. [Google Scholar]
- Industry 4.0 Challenges and Solutions for the Digital Transformation and Use of Exponential Technologies, Deloitte, 2015. Available online: https://www2.deloitte.com/content/dam/Deloitte/ch/Documents/manufacturing/ch-en-manufacturing-industry-4-0-24102014.pdf (accessed on 8 May 2018).
- Mabe, J. Photonic Low-Cost Sensors for in-Line Fluid Monitoring; Euskal Herriko Unibertsitatea: Vizcaya, Spain, 2017; Available online: http://hdl.handle.net/10810/25046 (accessed on 5 May 2018).
- Thota, H.; Munir, Z. Key Concepts in Innovation. J. Prod. Innov. Manag. 2012, 4, 681–683. [Google Scholar] [CrossRef]
- The Fast Track to Success with Agile Product Development, Bosch Group. 2015. Available online: http://www.bosch-presse.de/pressportal/de/en/the-fast-track-to-success-with-agile-product-development-42983.html (accessed on 7 May 2018).
- Johnson, M. Past, Present and Future of Oil Analysis: An Expert Panel Discussion on the Future of Oil Analysis. Tribol. Lubr. Trans. 2007, 64, 32–39. [Google Scholar]
- Zhao, Y. Oil Analysis Handbook, 1st ed.; Spectro Scientific: Chelmsford, MA, USA, 2014; Available online: https://www.spectrosci.com/default/assets/File/SpectroSci_OilAnalysisHandbook_FINAL_2014-08.pdf (accessed on 3 May 2018).
- Toms, L.A.; Toms, A.M. Machinery Oil Analysis: Methods, Automation & Benefits, 3rd ed.; STLE: Park Ridge, IL, USA, 2008. [Google Scholar]
- ASTM D974-14e2, Standard Test Method for Acid Number and Base Number by Color-Indicator Titration, West Conshohocken, PA. 2014. Available online: http://www.astm.org/Standards/D974 (accessed on 4 May 2018).
- ASTM D664-17a, Standard Test Method for Acid Number of Petroleum Products by Potentiometric Titration, ASTM International, West Conshohocken, PA. 2017. Available online: http://www.astm.org/Standards/D664 (accessed on 4 May 2018).
- Johnson, M.; Spurlock, M. Best practices: Strategic oil analysis: Setting the test slate. Tribol. Lubr. Technol. 2009, 65, 20–26. [Google Scholar]
- ASTM D6971-09(2014), Standard Test Method for Measurement of Hindered Phenolic and Aromatic Amine Antioxidant Content in Non-Zinc Turbine Oils by Linear Sweep Voltammetry, ASTM International, West Conshohocken, PA. 2014. Available online: http://www.astm.org/Standards/D6971 (accessed on 4 May 2018).
- ASTM D6810-13, Standard Test Method for Measurement of Hindered Phenolic Antioxidant Content in Non-Zinc Turbine Oils by Linear Sweep Voltammetry, ASTM International, West Conshohocken, PA. 2013. Available online: http://www.astm.org/Standards/D6810 (accessed on 4 May 2018).
- ASTM E2412-10, Standard Practice for Condition Monitoring of Used Lubricants by Trend Analysis Using Fourier Transform Infrared (FT-IR) Spectrometry, ASTM International, West Conshohocken, PA. 2010. Available online: http://www.astm.org/Standards/E2412 (accessed on 4 May 2018).
- ASTM D445-17a, Standard Test Method for Kinematic Viscosity of Transparent and Opaque Liquids (and Calculation of Dynamic Viscosity), ASTM International, West Conshohocken, PA. 2017. Available online: http://www.astm.org/Standards/D445 (accessed on 4 May 2018).
- ASTM D1500-12(2017), Standard Test Method for ASTM Color of Petroleum Products (ASTM Color Scale), ASTM International, West Conshohocken, PA. 2017. Available online: http://www.astm.org/Standards/D1500 (accessed on 4 May 2018).
- ASTM D7843-16, Standard Test Method for Measurement of Lubricant Generated Insoluble Color Bodies in In-Service Turbine Oils Using Membrane Patch Colorimetry, ASTM International, West Conshohocken, PA. 2016. Available online: http://www.astm.org/Standards/D7843 (accessed on 4 May 2018).
- Livingstone, G.J.; Prescott, J.; Wooton, D. Detecting and solving lube oil varnish problems. Power 2007, 151, 74–85. [Google Scholar]
- Torres, A.; Hadfield, M. Low-Cost Oil Quality Sensor Based on Changes in Complex Permittivity. Sensors 2011, 11, 10675–10690. [Google Scholar] [CrossRef]
- Rauscher, M.; Tremmel, A.J.; Schardt, M.; Koch, A.W. Non-Dispersive Infrared Sensor for Online Condition Monitoring of Gearbox Oil. Sensors 2017, 17, 399. [Google Scholar] [CrossRef] [PubMed]
- Han, Z.; Wang, Y.; Qing, X. Characteristics Study of In-Situ Capacitive Sensor for Monitoring Lubrication Oil Debris. Sensors 2017, 17, 2851. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Mei, G.; Yang, H.; Yu, F.; Gao, J. Performance Characteristics and Temperature Compensation Method of Fluid Property Sensor Based on Tuning-Fork Technology. J. Sens. 2016, 1386564. [Google Scholar] [CrossRef]
- Shinde, H.; Bewoor, A. Capacitive sensor for engine oil deterioration measurement. AIP Conf. Proc. 2018, 1943, 020099. [Google Scholar] [CrossRef]
- Riziotis, C.; El Sachat, A.; Markos, C.; Velanas, P.; Meristoudi, A.; Papadopoulos, A. Assessment of fiber optic sensors for aging monitoring of industrial liquid coolants. In Proceedings of the SPIE—The International Society for Optical Engineering, Jena, Germany, 7–10 September 2015; Article No; Volume 9359. Article No. 93591Y. [Google Scholar] [CrossRef]
- Weling, A.S.; Girgenti, R.S.; Fratkin, M.B.; Henning, P.F. In-Situ Fluid Analysis Sensor Bolt. U.S. Patent No. US9228956B2, 5 January 2016. [Google Scholar]
- Miranda, R.; Pacheco, G.; Valadez, R. Device for In-Line Monitoring of Fluid Colours. Patent Application No. WO2016080824A4, 26 May 2016. [Google Scholar]
- Ossia, C.V.; Kong, H.; Markova, L. Utilization of color change in the condition monitoring of synthetic hydraulic oils. Ind. Lubr. Tribol. 2010, 62, 349–355. [Google Scholar] [CrossRef]
- Filhaber, J. How Wedge and Decenter Affect Aspheric Optics. Photonics Spectra 2013, 47, 44–47. Available online: https://www.photonics.com/a55004/How_Wedge_and_Decenter_Affect_Aspheric_Optics (accessed on 7 May 2018).
- Hill, D.; McEuen, K. 4 Big Mistakes in Developing Photonics-Enabled Medical Devices. White Paper, Zygo Corporation. Available online: https://www.meddeviceonline.com/doc/big-mistakes-in-developing-photonics-enabled-medical-devices-0001 (accessed on 7 May 2018).
- Aranzabe, E.; Marcaide, A.; Arnaiz, A.; Hernaiz, M. New method proposed for the assessment of lubricant biodegradability during its use. J. Near Infrared Spectrosc. 2008, 16. [Google Scholar] [CrossRef]
- Terradillos, J.; Arnaiz, A.; Gorritxategi, E.; Aranzabe, A.; Aranzabe, E. Novel Method for Lube Quality Status Assessment Based on Visible Spectrometric Analysis. In Proceedings of the Lubrication Management and Technology (Lubmat) 2008, San Sebastian, Spain, 4–6 June 2008. [Google Scholar]
- Halme, J.; Gorritxategi, E.; Bellew, J. Lubricating Oil Sensors. In E-Maintenance, 1st ed.; Springer: London, UK, 2010; pp. 173–196. ISBN 978-1-84996-204-9. [Google Scholar]
- Bravo-Imaz, I.; Garcia-Arribas, A.; Gorritxategi, E.; Barandiaran, J.M. Magnetoelastic Viscosity Sensor for On-Line Status Assessment of Lubricant Oils. IEEE Trans. Magn. 2013, 49, 113–116. [Google Scholar] [CrossRef]
- Gorritxategi, E.; Arnaiz, A.; Aranzabe, A.; Terradillos, J. Method and Device for Determining the State of Degradation of a Lubricant Oil. U.S. Patent No. EP2615444B1, 11 April 2018. [Google Scholar]
- Gorritxategi, E. Dispositivo Sensor Óptico Para Determinación del Estado de Degradación de un Aceite Lubricante en un Circuito de Lubricación de una Máquina. Patent Specification No. ES2455465B1, 2 March 2013. [Google Scholar]
- Gorritxategi, E.; García-Arribas, A.; Aranzabe, A. Innovative On-Line Oil Sensor Technologies for the Condition Monitoring of Wind Turbines. Key Eng. Mater. 2014, 644, 53–56. [Google Scholar] [CrossRef]
- Gorritxategi, E.; Mabe, J. System and Method for Monitoring a Fluid. European Patent Application EP2980557A1, 3 February 2016. [Google Scholar]
- Villar, A.; Gorritxategi, E.; Fernandez, S.; Fernandez, L.A. Visible/NIR on-line sensor for marine engine oil condition monitoring applying chemometric methods. Int. Soc. Opt. Eng. 2010, 7726, 77262F. [Google Scholar] [CrossRef]
- Villar, A.; Gorritxategi, E.; Fernandez, S.; Fernandez, L.A. Optimization of the multivariate calibration of a Vis-NIR sensor for the on-line monitoring of marine diesel engine lubricating oil by variable selection methods. Chemom. Intell. Lab. Syst. 2014, 130, 68–75. [Google Scholar] [CrossRef]
- Villar, A.; Gorritxategi, E.; Aranzabe, E.; Fernandez, L.A. Low-cost visible-near infrared sensor for on-line monitoring of fat and fatty acids content during the manufacturing process of the milk. Food Chem. 2012, 135, 2756–2760. [Google Scholar] [CrossRef] [PubMed]
- Mabe, J.; Zubia, J.; Gorritxategi, E. Photonic Low Cost Micro-Sensor for in-Line Wear Particle Detection in Flowing Lube Oils. Sensors 2017, 17, 586. [Google Scholar] [CrossRef] [PubMed]
- Gorritxategi, E.; Mabe, J.; Delgado, A.; Villar, A.; Urreta, H. Fluid Monitoring System Based on Near-Infrared Spectroscopy. European Patent Application EP3176565A1, 7 June 2017. [Google Scholar]
- Flammer, J.; Mozaffarieh, M.; Bebie, H. The Interaction between Light and Matter. In Basic Sciences in Ophthalmology, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 978-3-642-32261-7. [Google Scholar]
- Workman, J.J.J. Concise Handbook of Analytical Spectroscopy, the: Theory, Applications, and Reference Materials: Volume 2: Visible Spectroscopy; World Scientific Publishing Company: Singapore, 2016; ISBN 978-981-4508-05-6. [Google Scholar]
- Lindon, J.C.; Tranter, G.E.; Koppenaal, D.W. Encyclopedia of Spectroscopy and Spectrometry, 3rd ed.; Academic Press: New York, NY, USA, 2016; ISBN 978–0128032244. [Google Scholar]
- McGrath, R.G.; Macmillan, I.C. Discovery-Driven Growth: A Breakthrough Process to Reduce Risk and Seize Opportunity, 1st ed.; Harvard Review Press: Boston, MA, USA, 2009. [Google Scholar]
- Loch, C.H.; DeMever, A.; Pich, M. Managing the Unknown: A New Approach to Managing High Uncertainty and Risk in Projects; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Lenfle, S.; Loch, C. Lost Roots: How Project Management Came to Emphasize Control Over Flexibility and Novelty. Calif. Manag. Rev. 2010, 53, 32–55. [Google Scholar] [CrossRef]
- Mabe, J. From the Innovative Idea to the High Added-Value Product. Newtek (10), IK4-TEKNIKER. 2014. Available online: http://www.newtek-tech.es/newtek/boletin/10/eng/especialista1.php (accessed on 11 May 2018).
- Role of Design for Six Sigma in Total Product Development, Six Sigma Academy International LCC. Available online: https://lgosdm.mit.edu/VCSS/web_seminars/docs/eskandari_052606.pdf (accessed on 8 May 2018).
- Ries, E. The Lean Startup: How Today’s Entrepreneurs Use Continuous Innovation to Create Radically Successful Businesses; Crown Business, Crown Publishing Group: New York, NY, USA, 2011. [Google Scholar]
- Chesbrough, H.W. Open Innovation: The New Imperative for Creating and Profiting from Technology, 1st ed.; Harvard Business School Press: Boston, MA, USA, 2006; ISBN 978-1422102831. [Google Scholar]
- Cooper, R.G. Invited Article: What’s Next? After Stage-Gate. Res.-Technol. Manag. 2014, 57, 20–31. [Google Scholar] [CrossRef]
- Frick, B.; Schenkel, B. Spectral Photometer and Associated Measuring Head. U.S. Patent US7365843B2, 29 April 2008. [Google Scholar]
- Hrbac, R.; Kolar, V.; Novak, T.; Bartłomiejczyk, M. Prototype of a low-cost luxmeter with wide measuring range designed for railway stations dynamic lighting systems. In Proceedings of the 2014 15th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 12–14 May 2014; Volume 5, pp. 665–670. [Google Scholar] [CrossRef]
- Cussler, E.L. Diffusion Mass Transfer in Fluid Systems, 3rd ed.; Cambridge University Press: Cambridge, UK, 2009; ISBN 978-0-511-47892-5. [Google Scholar]
- Tyrrel, H.J.V.; Harris, K.R. Diffusion in Liquids: A Theoretical and Experimental Study, 1st ed.; Butterworth-Heinemann: Oxford, UK, 1984; ISBN 978-0-408-17591-3. [Google Scholar]
- HAMAMATSU Color/proximity Sensor. Available online: https://www.hamamatsu.com/resources/pdf/ssd/p12347-01ct_kpic1084e.pdf (accessed on 3 May 2018).
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sector | Oil (L) | Fault | Consequence | ||
|---|---|---|---|---|---|
| Electricity generation | Gas turbine | Turbine bearings (300 L) | Very serious | Machine standstill | |
| Steam turbine | Bearings (300 L) | Plant stop | |||
| Wind turbine | Multiplier (300 L–1000 L) | Critical situation | |||
| Cement industry | Cement grinding reducer (2000 L) | Very serious | Line stop | ||
| Other oil sumps (1000–1500 L) | |||||
| Cement grinding supports (500 L) | |||||
| Hydraulic group (80 L) | |||||
| Drainage and treatment of wastewater | Sanitation | Gas engine (>2000 L) | Very serious | Stop: 15–20 days | |
| Alternative hydraulic pump (800 L) | Less serious | Expensive breakdown | |||
| Furnace pumps (500 L) | |||||
| Treatment | Hydraulic turbines | Blade activation (400 L) | Serious/ Very serious | Stop: > a month | |
| Greasing generator bearings (400 L) | Expensive breakdown | ||||
| Hydraulic presses and stamping | Hydraulic drawing machines | Small (3000 L) | Very serious | Stop | |
| Medium (3000 L–7000 L) | |||||
| Large (7000 L–30,000 L) | |||||
| Steel sector | Forging press (>3.000 L) | Serious/ Very serious | Stop Expensive breakdown | ||
| Drill press (1600 Tn) | |||||
| Extortion press (3600 Tn) | |||||
| Clamping presses (<600 L) | |||||
| High pressure pumps (200 L–400 L) | |||||
| Automotive | Welding robot (1 L) | Very serious | Service deterioration, Unplanned outage | ||
| Assembly robot (2 L) | |||||
| Painting robot (1 L) | |||||
| Manufacturing | Hydraulic group (80 L) | Very serious | Plant unplanned outage, Expensive breakdown | ||
| Process gearbox (40 L) | |||||
| Process pumps (20 L) | |||||
| Storage tanks | Oils (100 KL) | Serious/ Very serious | Fluid disposal | ||
| Sensor | Manufacturer | Measurement Principle | Information | Price | Size (mm) |
|---|---|---|---|---|---|
| LubCos | ARGO-HYTOS | Dielectric | Oil Condition, Temperature, Humidity | ++ | Ø42 × 147 |
| OilQSens | b2 electronic gmbh | Permittivity Dielectric | Conductivity, Permittivity, Temperature, Tan Delta, Water, Breakdown Voltage | ++++ | Ø70 × 103 |
| TRIDENT QW3100 | Poseidon Systems | Electrochemical impedance spectroscopy | Additive, contaminants, water | ++ | Ø38 × 121 |
| ANALEXrs Oil condition | Kittiwake | Dielectric constant | Oil Condition (%) | ++ | Ø30 × 130 |
| Oil Condition Sensor | Lubrigard Ltd. | Dielectric loss factor | Oil contamination | ++++ | Ø37 × 76 |
| OQSx | TANDeltaSystems | Tan Delta | Oil Quality (Tan Delta Number) Oil Temperature | ++ | Ø37 × 90 |
| Oil Insyte | Voelker Sensors Inc. | Dielectric Constant | Oxi | ++ | Ø35 × 120 |
| Oil Quality Sensor OQS | STAUFF | Dielectric | Oil Quality | ++++ | Ø37 × 80 |
| Solution Mechanisms | ||
|---|---|---|
| Functional | Technical/Design | |
| Significant RGB measurement | Position and characteristics of the optical elements (light source, RGB detector, optical back element, etc.) to maximize RGB measurement dynamic range (Optical Subsystem Design). |
|
| Sample cavity design to guarantee a correct sample acquisition: cavity filling, air evacuation and fluid sample renewal (Fluidical-Mechanical Subsystem Design). |
| |
| Stable RGB measurement | Dependency between the light source variability versus temperature and the RGB measurement variability, and required stability control mechanisms (Optical Subsystem Design). |
|
| Section | Activity | Uncertainty |
|---|---|---|
| 3.2.1 | 1. Theoretical Approach of the Optical Subsystem of the Alpha Prototype | RGB Measurement Dynamic Range |
| 3.2.2 | 3. Optical Simulation of the Alpha Prototype | |
| 3.2.3 | 5. RGB Measurement Tests with Alta Prototype | |
| 3.2.4 | 8. Optical Simulation of the Beta Prototype | |
| 3.2.5 | 10. RGB Measurement Tests with Beta Prototype | |
| 3.3.1 | 2. Theoretical Approach of the Optical Subsystem of the Alpha Prototype versus Temperature | RGB Measurement Stability |
| 3.3.2 | 6. Temperature-Dependent RGB Measurement Tests with Alpha Prototype | |
| 3.3.3 | 9. Lighting Control Design and Simulation | |
| 3.3.4 | 11. Temperature-Dependent RGB Measurement Tests with Beta Prototype | |
| 3.4.1 | 4. Computational Fluidic Dynamic (CFD) Simulation of the Alpha Prototype | Fluidic Sample Acquisition |
| 3.4.2 | 7. Fluidic (Sample Acquisition) Tests with Alpha Prototype |
| Oil Sample | λ = 460 nm (Blue Colour) | λ = 530 nm (Green Colour) | λ = 614 nm–616 nm (Red Colour) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| T [%] | R [%] | A | T [%] | R [%] | A | T [%] | R [%] | A | |
| Kluber (Fresh) | 88.36 | 5.84 | 0.0534 | 90.35 | 6.14 | 0.0437 | 91.26 91.29 | 6.16 6.17 | 0.0393 0.0393 |
| Cepsa (Fresh) | 88.27 | 6.46 | 0.054 | 90.98 | 6.8 | 0.0409 | 91.91 91.89 | 6.81 6.8 | 0.0366 0.0368 |
| Motor (Degraded) | 0.58 | 4.59 | 2.2363 | 4.16 | 4.59 | 1.3799 | 12.95 13.19 | 4.72 4.71 | 0.8868 0.879 |
| Beslux (Degraded) | 0 | 4.02 | 4.9848 | 0.02 | 3.91 | 3.7486 | 3.01 3.23 | 3.81 3.81 | 1.5348 1.5019 |
| Kluber (Degraded) | 0 | 3.29 | 5.0236 | 0.66 | 3.33 | 2.1821 | 10.88 11.34 | 3.34 3.34 | 0.9636 0.9455 |
| Cavity Length | (i) Oil Sample (Transmitted Light) | (ii) Back Element (Reflected Light) | (iii) Oil Sample (Transmitted Light) → RGB Detector | ||||||
|---|---|---|---|---|---|---|---|---|---|
| B | G | R | B | G | R | B | G | R | |
| KluberSynth fresh oil | |||||||||
| 0.5 mm | 94% | 95% | 96% | 85% | 86% | 86% | 80% | 81% | 82% |
| 1 mm | 88% | 90% | 91% | 80% | 81% | 82% | 70% | 74% | 75% |
| 1.5 mm | 83% | 86% | 87% | 75% | 77% | 79% | 62% | 67% | 69% |
| 2 mm | 78% | 82% | 83% | 70% | 74% | 75% | 55% | 60% | 63% |
| KluberSynth degraded oil | |||||||||
| 0.5 mm | 0% | 8% | 33% | 0% | 7% | 30% | 0% | 1% | 10% |
| 1 mm | 0% | 1% | 11% | 0% | 1% | 1% | 0% | 0% | 1% |
| 1.5 mm | 0% | 0% | 4% | 0% | 0% | 3% | 0% | 0% | 0% |
| 2 mm | 0% | 0% | 1% | 0% | 0% | 1% | 0% | 0% | 0% |
| Oil Sample | Absorbent | Scattering | ||||
|---|---|---|---|---|---|---|
| Cavity Length | 0.5 mm | 1 mm | 2 mm | 0.5 mm | 1 mm | 2 mm |
| RGB (Lumens) | 3.98 × 10−6 | 3.26 × 10−6 | 3.14 × 10−6 | 6.92 × 10−6 | 7.09 × 10−6 | 7.59 × 10−6 |
| Photodiode (Lumens) | 2.52 × 10−4 | 2.61 × 10−4 | 2.55 × 10−4 | 2.60 × 10−4 | 2.59 × 10−4 | 2.64 × 10−4 |
| Emitter: 1 Lumen/1.00 × 106 rays | ||||||
| Cavity Length | 2 mm | 1.5 mm | 1 mm | 0.5 mm | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Oil Sample | R | G | B | R | G | B | R | G | B | R | G | B |
| No sample | 59% | 82% | 49% | 55% | 84% | 48% | 51% | 88% | 48% | 63% | 84% | 46% |
| 0% Degraded | 44% | 61% | 36% | 50% | 63% | 44% | 56% | 91% | 51% | 60% | 82% | 44% |
| 50% Degraded | 24% | 35% | 22% | 32% | 45% | 30% | 41% | 59% | 39% | 56% | 74% | 34% |
| 100% Degraded | 20% | 33% | 21% | 23% | 36% | 23% | 23% | 39% | 26% | 47% | 65% | 26% |
| Housing | Absorbent | Mirror | ||||||
|---|---|---|---|---|---|---|---|---|
| Oil Sample | Absorbent | Scattering | Absorbent | Scattering | ||||
| Anti-Crosst Shield | RGB | PD | RGB | PD | RGB | PD | RGB | PD |
| 3 mm (Absorbent) | 7.93 × 10−7 | 2.56 × 10−4 | 1.26 × 10−6 | 2.62 × 10−4 | 3.76 × 10−5 | 2.64 × 10−4 | 5.98 × 10−5 | 2.52 × 10−4 |
| 24 mm (Absorbent) | 0 | 2.57 × 10−4 | 3.19 × 10−9 | 2.68 × 10−4 | 0 | 2.64 × 10−4 | 6.02 × 10−6 | 2.55 × 10−4 |
| 24 mm (Mirror) | 0 | 3.05 × 10−4 | 1.16 × 10−8 | 3.04 × 10−4 | 3.50 × 10−8 | 2.99 × 10−5 | 2.30 × 10−5 | 2.96 × 10−4 |
| Emitter: 1 Lumen/1.00× 106 rays. | ||||||||
| Beta Prototype | Alpha Prototype | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Inner Housing | Reflective | Absorbent | |||||||
| Anti-Crosstalk Shield | 24 mm Absorbent | 24 mm Reflective | 3 mm Absorbent | ||||||
| Oil Sample | R | G | B | R | G | B | R | G | B |
| No Sample | 75% | 81% | 29% | 61% | 80% | 41% | 62% | 81% | 50% |
| 0% Degraded | 68% | 72% | 25% | 48% | 63% | 31% | 61% | 76% | 48% |
| 33% Degraded | 64% | 65% | 18% | 41% | 51% | 18% | 50% | 56% | 39% |
| 66% Degraded | 60% | 58% | 15% | 37% | 41% | 11% | 37% | 43% | 30% |
| 100% Degraded | 59% | 55% | 14% | 35% | 35% | 9% | 26% | 33% | 24% |
| ΔP System Input/Output [Pa] | Mass Balance | Mass Flow [kg/s] | Volumetric Flow [m3/s] | ΔP Sensor Input/Output [Pa] |
|---|---|---|---|---|
| Sample Cavity Length = 2 mm (Vsensor = 2.5336 × 10−7 m3) | ||||
| 100 Pa | Satisfy | 4.58 × 10−5 | 5.325962 × 10−8 | 17.07 |
| 1000 Pa | Satisfy | 4.579 × 10−4 | 5.325 × 10−7 | 171.01 |
| 10000 Pa | Satisfy | 4.579 × 10−3 | 5.3136 × 10−6 | 1706.35 |
| Sample Cavity Length = 0.5 mm (Vsensor = 6.334 × 10−8 m3) | ||||
| 100 Pa | Satisfy | 2.8517 × 10−6 | 3.316 × 10−5 | 95.48 |
| 1000 Pa | Satisfy | 2.8367 × 10−5 | 3.298 × 10−5 | 956.96 |
| 10000 Pa | Satisfy | 2.8359 × 10−4 | 3.298 × 10−7 | 9569.14 |
| Uncertainties | Obtained Results | |
|---|---|---|
| Functional | Technical/Design | |
| Significant RGB measurement | Position and characteristics of the optical elements to maximize RGB measurement dynamic range (Optical Subsystem Design). | Significant/Representative RGB measurement dynamic range within tested 0% and 100% degraded real oil samples (see Section 3.2). |
| Sample cavity design to guarantee a correct sample acquisition (Fluidical-Mechanical Subsystem Design). | Minimum pressure drops of 100 Pa or compliance with diffusion principles to ensure sample acquisition (see Section 3.4). | |
| Stable RGB measurement | Measurement dependency versus temperature and required stability control mechanisms (Optical Subsystem Design). | 10% deviation for channel G, 8% for channel R and 7% for channel B versus temperature (see Section 3.3). |
| Cost | |
|---|---|
| Components | 35 € |
| PCB | 4 € |
| Mechanics | 27 € |
| Assembly | (5 min) 5 € |
| Calibration | (30 min) 30 € |
| TOTAL | 101 € |
| Oil Sample | OD | RULER | AN | FTIR (Oxi) | MPC (cielab) |
|---|---|---|---|---|---|
| Laboratory Results | |||||
| Fresh oil | 0% | 100% | 0.18 | <1 | 0 |
| 33% Degraded | 33% | 47% | 0.22 | <1 | 10 |
| 66% Degraded | 66% | 21% | 0.35 | 2 | 25 |
| 100% Degraded | 100% | 8% | 0.47 | 5 | 45 |
| Sensor (Beta Prototype) | |||||
| 33% Degraded | 37% | 44.12% | 0.17 | 0 | 8 |
| 66% Degraded | 68% | 12.56% | 0.29 | 2 | 23 |
| 100% Degraded | 96% | 1% | 0.42 | 6 | 48 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lopez, P.; Mabe, J.; Miró, G.; Etxeberria, L. Low Cost Photonic Sensor for in-Line Oil Quality Monitoring: Methodological Development Process towards Uncertainty Mitigation. Sensors 2018, 18, 2015. https://doi.org/10.3390/s18072015
Lopez P, Mabe J, Miró G, Etxeberria L. Low Cost Photonic Sensor for in-Line Oil Quality Monitoring: Methodological Development Process towards Uncertainty Mitigation. Sensors. 2018; 18(7):2015. https://doi.org/10.3390/s18072015
Chicago/Turabian StyleLopez, Patricia, Jon Mabe, Guillermo Miró, and Leire Etxeberria. 2018. "Low Cost Photonic Sensor for in-Line Oil Quality Monitoring: Methodological Development Process towards Uncertainty Mitigation" Sensors 18, no. 7: 2015. https://doi.org/10.3390/s18072015
APA StyleLopez, P., Mabe, J., Miró, G., & Etxeberria, L. (2018). Low Cost Photonic Sensor for in-Line Oil Quality Monitoring: Methodological Development Process towards Uncertainty Mitigation. Sensors, 18(7), 2015. https://doi.org/10.3390/s18072015