1. Introduction
Crack damage has become the main factor to the safety of structures, and connection parts of metal structures are generally stress-concentration areas where cracks are most likely to occur. As the most important structural connection in various equipment and facilities, welds are also vulnerable to cracks. Many equipment and facilities, such as cranes, power generation equipment, pressure vessels, pipelines, bridges, ships, etc., have all experienced catastrophic accidents due to the fracture of welded structures. According to a statistic of pressure vessels, more than 70% of accidents are caused by cracks [
1]. In the inspection statistics for many harbor cranes, the potential threat to the safe use of crane metal structures is mainly cracks at weld seams, and the resulting failures account for approximately 80% of all failures [
2]. Despite all kinds of cracks in these cranes, these equipment are still in service due to various reasons, which brings huge safety risks.
Structural health monitoring (SHM) technology can promptly detect defects and improve the safety and maintainability of equipment and facilities. Current SHM technologies include optical fiber [
3,
4,
5,
6], CVM sensor [
7], acoustic emission [
8,
9], ultrasonic [
10,
11], and other sensor technologies [
12,
13]. Flexible eddy current sensors are manufactured by the flexible printed circuit technology, which can be used for crack monitoring of various curved structures. Alexi Rakow and Fukuo Chang [
14] developed a flexible eddy current sensor integrated with the bolt for monitoring crack growth of structures around bolt holes. The signals of the sensor are affected by stress changes during the experiment, resulting in a lower sensitivity to cracks. JENTEK Sensors [
15,
16,
17,
18,
19] has developed a variety of Meandering Winding Magnetometer (MWM) sensors for damage detection and quality evaluation of metal structures, including aeroengine blades, turbine disks, pressure vessels, oil pipelines and other structures with complex curved surfaces. In addition, the sensor has been used to crack monitoring of bolt-jointed structures. However, the influence of the service environment on the sensor output signal has not been studied. In a previous paper [
20], the influence of temperature changes on signals of a rosette eddy current sensor is studied. Results show that the ambient temperature has a great influence on the output signal of the sensor by affecting the conductivity and permeability of the structures under testing.
Therefore, the influence of stress, temperature, and crack on the output signal of a traditional FECA sensor for crack monitoring of welded structures was studied. A finite element model was established to study the effect of crack perturbation on eddy currents distribution and output signals. According to the results obtained by the finite element analysis, the HS-FECA sensor was proposed. The sensitivity of the sensor to cracks was studied using finite element simulation and experiments.
3. The Finite Element Analyses of the Sensor
In this paper, a 3-D finite element model is established in Comsol software [
21], as shown in
Figure 9. The coil thickness is so small and the exciting current frequency is so high that the skin effect of eddy current in this model is obvious. Therefore, this paper uses the line model to simulate exciting coils and the area model to simulate sense channels. To simulate the crack propagation, a 0.02 mm wide crack is established with a length from 0 mm to 23 mm. The distance between the left most exciting coil and the left edge of the structure is 1 mm. The induced voltage of each sensing channel can be obtained using Formula (2), and then the output signal
AR of each channel can be obtained by Formula (1).
where
B is magnitude of magnetic flux density and
S is the area of the sense element.
The variation rate of the output signal is defined as:
where
SC is the variation rate of the output signal and
AR0 is the initial output signal of the sensor.
As shown in
Figure 10, when the crack propagates to the front-end exciting coil of a channel, the
SC of the channel begins to increase rapidly; when the crack tip just reaches the rear-end exciting coil of the channel, the
SC reaches its maximum value and then slowly decreases. Therefore, the maximum value of
SC can characterize the sensor’s sensitivity to cracks. The simulation results show that the maximum value of the
SC in each channel does not exceed 5% when the crack propagates. The change is so small that the sensor’s sensitivity to cracks is too low.
As shown in
Figure 11 and
Figure 12, changes of permeability and conductivity have a significant effect on the output signal of the sensor. Temperature and stress variations can cause changes of the material’s conductivity and permeability, which is the reason the output signal of the sensor changes with temperature and stress variations.
As shown in
Figure 13a, before the crack initiates, three large eddy current loops are induced by exciting coils on the structure surface due to the opposite current flow of adjacent exciting coils, corresponding to channel 1, channel 3 and channel 5, respectively. When the crack propagates through the monitoring area, the three larger eddy current loops are split into six eddy current loops.
As shown in
Figure 14, when the crack propagates to the front end of channel 1, eddy currents around the crack flows around the crack tip. The crack disturbs the distribution of eddy currents, and
SC of the channel 1 starts to increase. As the crack grows, more and more eddy currents are disturbed, and the
SC continues to increase. When the crack propagates to the middle of the channel 1 (a = 3 mm), it is obvious that part of eddy currents flow toward eddy currents excited by the rear-end coil of channel 1 and form a loop. With the growth of the crack, eddy currents flowing around the crack tip are getting less, and the perturbation effect of the crack tip on eddy currents are also getting weaker. This leads to the fact that the increasing rate of
SC is getting smaller as the crack grows.
Figure 15 shows the eddy current distribution when the crack tip propagates in the corresponding area of channel 2. Because directions of exciting currents at the upper end of channel 2 are opposite and two exciting coils are so close, eddy currents in the region do not form a loop similar to that of the channel 1, and the eddy current density in the region is smaller. When the crack propagates in this region, eddy currents flowing around the crack tip are less, resulting in a weaker perturbation effect on eddy currents. Therefore, as shown in
Figure 10, the maximum values of
SC for channel 2 and channel 4 are only about 2.4%, which is less than that of channel 1, channel 3, and channel 5 (3.2%, 4.3%, and 4.2%, respectively). This phenomenon is verified in the crack monitoring experiment (
Figure 5): the maximum values of
SC for channel 1, channel 3, and channel 5 are all about 5%, while the maximum values of
SC for channel 2 and channel 4 are approximately 2%.
To analyze the perturbation effect of cracks on eddy currents, the current magnitude
IS at the crack tip surface is calculated as the crack propagation, as shown in
Figure 16. When the crack propagates in the corresponding area of channel 1,
IS first increases and then decreases. The increase is due to the presence of the crack that cause eddy currents to flow around the crack tip. As the crack propagates, some of the front-end eddy currents start flowing towards the rear-end eddy currents and form a loop, and part of eddy currents continue flowing around the crack tip. In the meantime,
IS begins to decrease, causing the perturbation of the crack tip to eddy currents to begin to decrease. When the crack propagates in the area corresponding to channel 2 (channel 4),
IS first decreases and then increases. This is mainly because the regions corresponding to channels 1, 3 and 5 form a relatively large current loop. Thus, the eddy current density of the corresponding regions of channel 2 and channel 4 is smaller, and the eddy current density at the middle of the two channels is the smallest.
Therefore, adjacent exciting currents in the opposite direction forms current loops when the crack propagates, making eddy currents at the crack tip decrease, reducing the perturbation of the crack on eddy currents, resulting in low sensitivity to crack detection.
4. Design of the HS-FECA Sensor
As shown in the previous section, the perturbation of the crack tip to the eddy currents plays a major role in the sensitivity to cracks. To improve the sensitivity of the sensor to cracks, this paper proposes a new winding method in which the exciting currents are arranged in the same direction (as shown in
Figure 17), so that the channels do not form any eddy current loop when the crack propagates. To verify the validity of this design method, a finite element model is established. In addition to the sensor winding method, the rest of the parameters are the same as those shown in
Figure 9.
Figure 18 shows the eddy current distribution in the monitoring area during crack propagation. As shown in the figure, the presence of a crack alters the flowing trajectory of eddy currents near the crack. Because directions of exciting currents are the same, eddy currents also flow in the same direction. Eddy currents near the crack do not form a loop, but always flow around the crack tip. As the crack propagates, more and more eddy currents flow around the crack tip. As shown in
Figure 19, the current magnitude at the crack tip surface
IS increases rapidly with crack propagation, which means the perturbation of the crack becomes stronger and stronger. As shown in
Figure 20,
SC of each channel in the new sensor has reached more than 120%. Compared to 5% of the traditional sensor, the sensitivity of the new sensor is at least 24 times that of the traditional one.
Figure 21 and
Figure 22 show the influence of changes in conductivity and permeability on output signals of the new sensor. Compared with effects of cracks on the output signal, effects of changes in conductivity and permeability are essentially negligible.
5. Experimental Verification of the HS-FECA Sensor
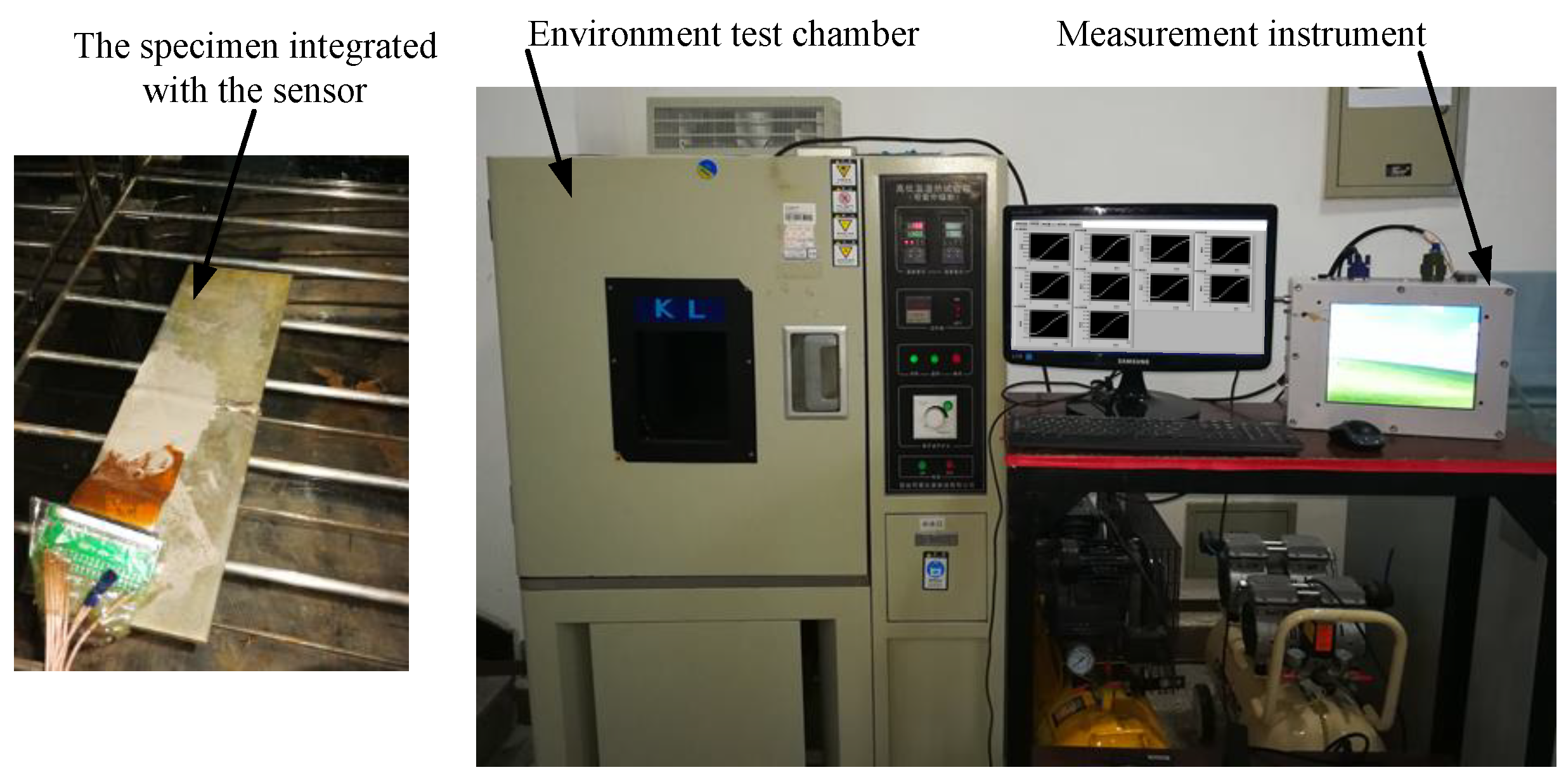
As shown in
Figure 23, to verify the monitoring sensitivity of the HS-FECA sensor, experimental investigations on effects of stress, temperature and crack are performed in this section. The specimen is the same welded structure shown in
Figure 3.
Firstly, effects of stress on output signals of the HS-FECA sensor were studied. A constant–amplitude spectrum (maximum stress
Smax = 220 MPa, stress ratio
R = 0, loading frequency
f = 0.02 Hz) was applied to the specimen, while signals of were collected. As shown in
Figure 24, the output signal of channel 1 changes with the change of stress, and the varying amplitude of the output signal is about 10%.
Then, the experiment of crack monitoring under temperature interference is carried out. A constant–amplitude spectrum (maximum stress
Smax = 220 MPa, stress ratio
R = 0, loading frequency
f = 15 Hz) was applied to the specimen. As shown in
Figure 25, when the loading cycles N = 755, the temperature starts to rise from 20 °C to 80 °C. Then, the temperature decreases to the room temperature. When the temperature reaches 80 °C, the maximum
SC of each channel is 8%, 13%, 13%, 12%, and 10%, respectively.
When the crack tip propagates to the rear end of each channel, the signal SC of each channel reaches the corresponding inflection point (C1–C5). Accordingly, loading cycles N corresponding to crack lengths of 5 mm, 9 mm, 13 mm, 17 mm, and 21 mm can be obtained as 43,064, 49,735, 55,920, 62,669, and 68,777, respectively. Besides, the maximum SC of each channel is 122%, 172%, 150%, 125%, and 95%, respectively. The sensitivity of the HS-FECA sensor is at least 19 times that of the original sensor. Compared with the variation of output signals resulting from the crack, the effect of temperature and stress on output signals of the sensor is so small that whether there is a crack below the sensor under the actual service environment can be easily judged.
When the sensor is applied to monitor cracks of actual welded structures, the channel numbers of the sensor and sizes of the sensor can be redesigned according to the critical crack length of the structure under monitoring. Because eddy current testing is a non-contact detection method, the sensor can be directly mounted on critical components of the structure using sealants without any other surface treatment. What operators need to do is to make sure the sense channels cover the welding seam where cracks are most likely to initiate and grow.
6. Conclusions
This paper mainly investigates FECA sensors for crack monitoring of welded structures under stress and temperature interference.
Firstly, experimental research on effects of stress, temperature and crack on the output signal of the traditional sensor was carried out. Experimental results show that the sensitivity of the sensor to cracks is so low that stress and temperature variations have great influences on the crack monitoring process. Then, a 3-D FE model was established to analyze the perturbation of the crack to eddy currents. According to results, the reason the sensitivity of the sensor is so low is because adjacent exciting currents in the opposite direction forms current loops when the crack propagates, making eddy currents at the crack tip decrease, reducing the perturbation effect of the crack on eddy currents.
Therefore, the HS-FECA sensor with a new winding method in which the exciting currents are arranged in the same direction was proposed. FE simulation reveals that the new winding method makes the perturbation effect of the crack on eddy currents stronger and stronger when the crack propagates, resulting in much higher sensitivity to cracks. The following experiments further prove that the sensitivity of the new sensor is at least 19 times that of the original one, both stress and temperature variations have little effects on output signals of the new sensor.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

























