1. Introduction
Recent advances in underwater sensor networks (UWSNs) have motivated the development of various applications for scientific, environmental, commercial and military purposes including environmental data collection, disasters prevention, assisted navigation, monitoring underwater equipments, offshore exploration, oil/gas spills monitoring and tactical surveillance [
1,
2,
3,
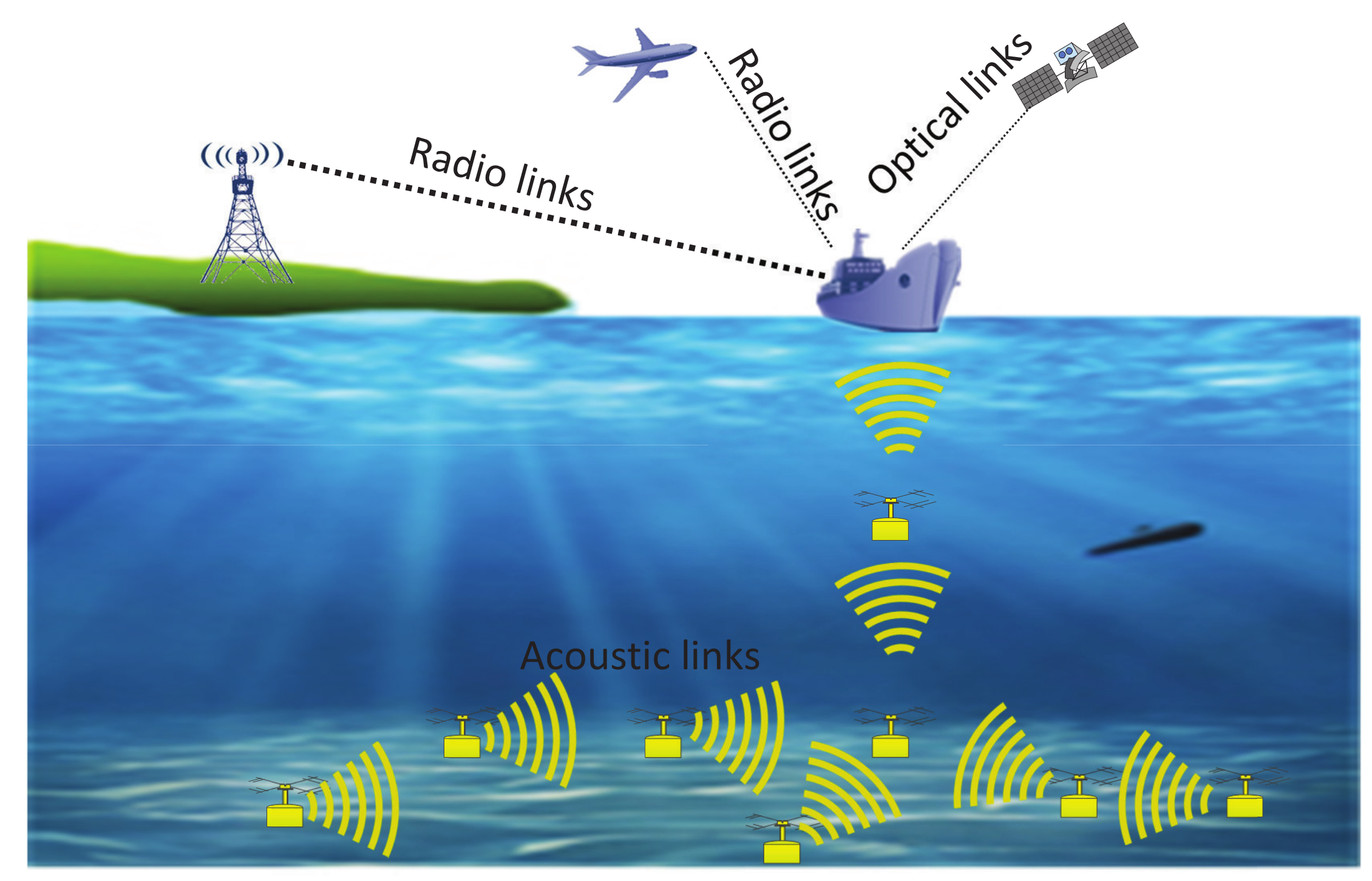
4]. To avoid the high absorption rate of electromagnetic waves and scattering of optical waves in water, acoustic waves are preferred for long-distance underwater communication. However, adverse characteristics of UWSNs [
5,
6,
7] such as dynamic structure, high energy consumption, limited available bandwidth, limited battery power, low transmission speed, severely attenuated channel, high latency, and high bit error rates pose great challenges to reliable underwater data transmissions.
In order to prolong the network lifetime, some researchers focus on the energy harvesting technique [
8,
9,
10] so that the sensor nodes can harvest energy from the environment and solve the energy limitation problem. However, the underwater sensors cannot use solar power chargers as it is hard for the sunlight to reach the deep sensors in an underwater environment. Besides, the underwater sensors are vulnerable to the seawater corrosion and marine animals’ activities. The energy harvesting technique still needs to be improved in underwater environments.
Multi-hop transmission is a promising technique for decreasing energy consumption and enhancing system stability in UWSNs and many underwater applications such as environmental data collection (temperature, conductivity, pH, dissolved oxygen, etc.), imaging underwater life, supervising geological processes on the ocean floor, and monitoring underwater equipments exploiting multi-hop communication to collect sensed data and forward them to the sink nodes on the water surface. So the routing protocol, which aims at choosing a reliable and energy efficient path to forward data to the gateway nodes, is essential in underwater data transmissions. As it is hard to replace the battery in underwater nodes, energy limitation is a vital problem in underwater routing protocol design.
Recently, many energy efficient routing protocols for UWSNs were proposed [
11,
12,
13,
14,
15]. These energy efficient routing protocols may consume less energy in total, but the energy consumption may focus on a few hot spots and it makes these nodes deplete their energy at an earlier time while other nodes may still have a lot of energy left. This unhealthy energy distribution leads to the void region problem and should be avoided. To solve this problem, a energy balancing technique [
16,
17] is proposed to balance the energy consumption in UWSNs. However, these balanced energy routing protocols induce frequent long range direct transmissions which result in high energy consumption and high probabilities of packet collision problem. In some large scale UWSNs, long range direct transmissions are unable to be realized due to the transmission power limitations of sensor nodes.
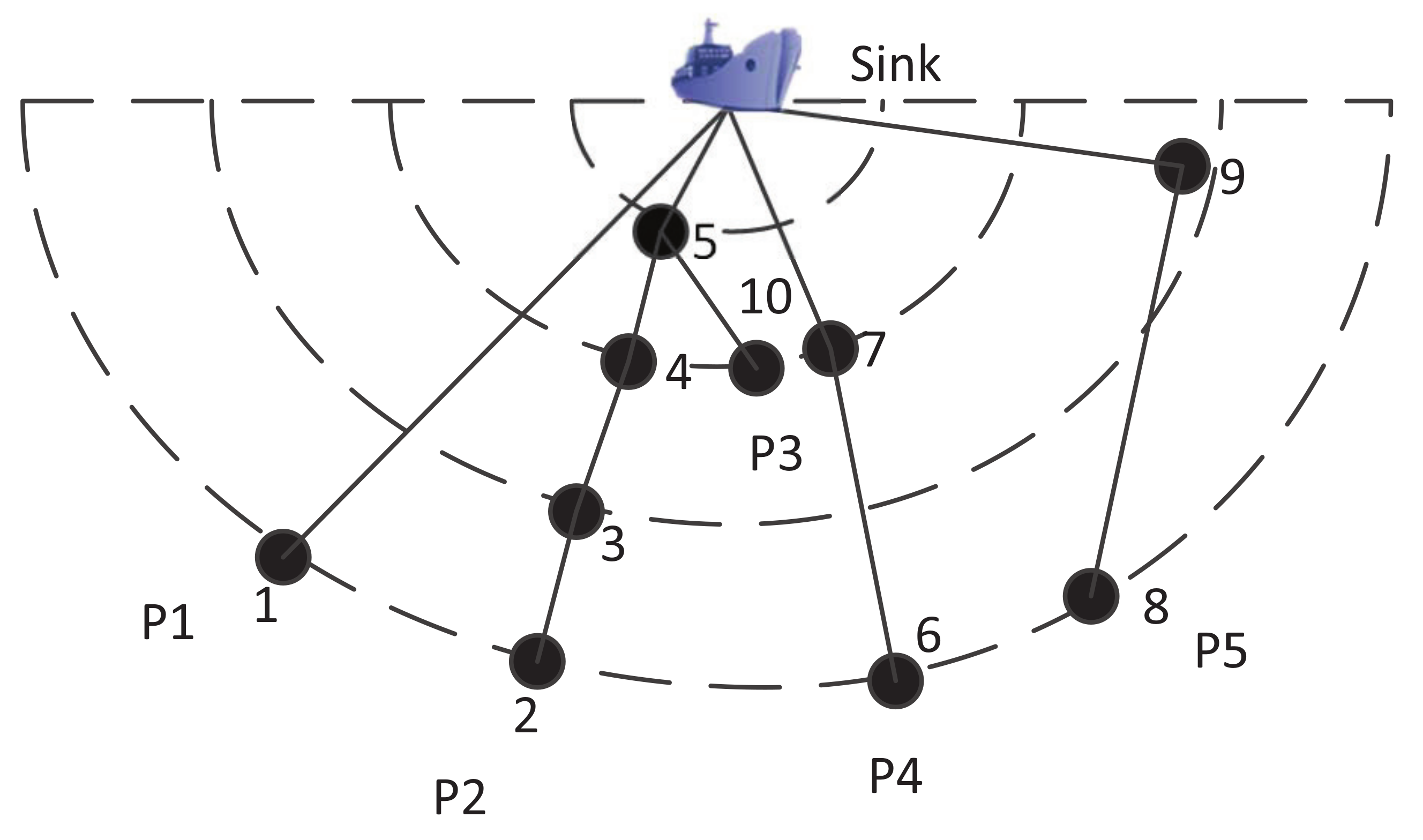
In this paper, an energy balanced and lifetime extended protocol (EBLE) is proposed to prolong the underwater network lifetime. The routing process is divided into two phases: (1) candidate forwarding set selection phase and (2) data transmission phase. In candidate forwarding set selection phase, each node stores the position and residual energy information of its neighborhood nodes and obtains the cost values according to our proposed cost function. During the data transmission phase, high residual energy level and low cost nodes are given higher priorities to forward data and then long range direct transmissions are avoided whereas the network maintains energy balance. A brief explanation of the basic idea of EBLE is shown in
Figure 1. A sink node is located on the surface and several sensor nodes are deployed in the semicircle around the sink. There are five paths P1∼P5 (solid lines) to transmit sensed data to the sink via multi-hop communications. The power consumption increases rapidly with the increase of communication range (proved in
Section 4.1), so the power consumption of P1 is much higher than P2 and P4, and data transmissions in P4 consume more energy power than P2. In order to save energy, P2 is preferred when all nodes have enough residual energy. However, as the traffic load of nodes nearby the sink (e.g., node 5) is much higher than that of nodes far away from the sink, a few nodes may deplete their energy while other nodes have abundant residual energy. This unbalanced energy consumption may result in void region problems in UWSNs and sensed data in some regions cannot be forwarded to the sink node efficiently. Some existing energy efficient protocols [
11,
12,
13,
14,
15] only focus on finding energy efficient paths, which may easily lead to void region problems. Energy balancing protocols like BEAR [
16] and BTM [
17] change their transmission mode to direct one-hop transmissions if their optimal energy efficient paths are energy limited. This operation introduces extra energy consumption and cannot use low traffic load nodes efficiently. To prolong the network lifetime, some low traffic load nodes (e.g., node 10) should be distributed with more loads. These low traffic load nodes can communicate with some high residual energy nodes (perhaps with long communication ranges) and relax the burden of other low residual energy nodes. For example, when node 7 lacks energy, node 6 should select node 10 to relay data while current energy balancing protocols like BTM just allow node 6 to transmit data directly to the sink. Another aspect that should be taken into consideration is energy efficiency optimization. Too long distance communication can consume the energy power at a high speed and thus the network lifetime is reduced. In
Figure 1, path P1 consumes more power than path P4, but consumes less energy than P5. So path P5 is only chosen when other paths are lacking residual energy obviously or there are no other paths. In our proposed protocol, the aim is to choose both energy balanced and energy efficient paths to forward data packets. The main contributions in this paper are summarized as follows:
An energy balanced and lifetime extended routing protocol, EBLE, is proposed. EBLE can choose several successor nodes according to the cost function and residual energy. When a possible forwarder’s energy level is lower than the sender, another suboptimal forwarder can take the place of the current one and thus the energy consumption is more balanced. The network lifetime is extended through choosing both energy balanced and efficient routes.
Detailed analysis of optimal energy consumption for different transmission modes are given and an energy cost function is proposed to optimize data transmissions in UWSNs.
Extensive simulations are conducted to verify the effectiveness and validity of our proposed EBLE and the results show that EBLE outperforms other existing energy balancing routing protocols in terms of energy consumption and network lifetime. Using EBLE, more packets can be transmitted before a first node in the network is depleted of its battery power. The network lifetime is prolonged by 62.8% on average when compared with BTM on random node distribution case.
The rest of the paper is organized as follows:
Section 2 shows the recent hot research topics and the related research of UWSNs routing protocols.
Section 3 describes the network and energy models in UWSNs and makes some assumptions about our proposed protocol. The detailed design of EBLE is illustrated in
Section 4 and numerous simulations are given in
Section 5.
Section 6 concludes the paper at last.
2. Related Work
Energy limitation, unstable links, long end-to-end delay are key characteristics of UWSNs. Therefore, numerous UWSNs routing protocols have been devoted to solving these problems. In this section, we discuss some of the existing UWSNs routing protocols and analyze their limitations in dealing with underwater reliable transmissions.
Peng Xie et al. [
13] proposed a vector-based forwarding protocol (VBF) for underwater sensor networks. VBF is a position-based routing approach and a routing “pipe” path is constructed to guide data transmissions, only nodes close to the vector from the source to the destination are chosen to forward the message. In this way, only a small fraction of the nodes are involved in routing. VBF also adopts a self-adaptation algorithm which allows nodes to weigh the benefit of forwarding packets. The data forwarding process in low priority nodes can be suppressed to avoid too many redundant transmissions. Packet delivery ratio and average delay performance are improved at the cost of energy consumption. HHVBF [
18] was later proposed to further improve the packet delivery ratio performance and robustness of VBF. HHVBF uses hop-by-hop routing vectors and is less sensitive to “routing pipe” radius threshold. Results show that HHVBF can improve data delivery ratio performance for sparse networks but consumes more energy. DFR [
12] exploits a packet flooding technique to increase the reliability. The number of forwarding packets nodes is controlled with the information of node position and link quality. DFR also performs well in data delivery ratio at the cost of large and unbalanced energy consumption.
In [
11], a depth-based routing (DBR) protocol was proposed to forward data from the seafloor to the sea surface. A key advantage of DBR is that DBR does not require full-dimensional location information of sensor nodes and only needs nodes depth information which can be easily obtained with an inexpensive depth sensor. DBR can achieve high packet delivery ratios (at least 95%) for dense networks but multiple sinks are required and redundant transmissions are induced. EEDBR [
19] is an enhanced version of DBR. Different from DBR, the residual energy of the sensor nodes in EEDBR is also taken into account to improve the network life-time and energy consumption is balanced to some extent. An energy-efficient and void avoidance depth based routing (EVA-DBR) [
20] protocol was proposed which can exclude trapped and void nodes from the routing paths using a passive participation approach. The number of participated nodes can be adjusted by changing transmission range settings and then redundant transmissions can be controlled.
Youngtae Noh et al. [
15] proposed a void-aware pressure routing protocol (VAPR) which uses periodic beacons to set up next-hop directions and to build a directional trail to the closest sonobuoy. The hydraulic pressure based anycast routing [
21] (HydroCast) also utilizes periodic beacons to obtain the neighbor nodes and prioritize forwarding nodes with Expected Packet Advance (EPA). VAPR and HydroCast can solve the void region problem but node residual energy is not considered and some nodes may deplete their energy due to the unbalanced heavy traffic load.
Flooding-based protocols perform well in terms of packet delivery ratio in underwater sensor networks but are usually not energy efficient. To solve the high energy consumption problem, Elvin Isufi et al. [
22] proposed an advanced flooding-based routing protocol for UWSNs. The number of the replicas can be reduced by considering the relative positions to reduce the number of relays. The selection of relays is based on the relative distance between relay and source/destination. A node is only chosen as a candidate forwarder when it is located inside the communication range of the source and is enough close to the destination. Moreover, network coding is introduced into transmissions. The relay nodes in the network can cancel duplicated transmissions by checking whether the received packet is an innovative one or not. Only independent packets can be encoded and forwarded to the sink. This scheme outperforms other flooding-based routing protocols in terms of energy consumption.
In [
5], a channel-aware routing protocol called CARP was proposed to select robust links with link quality information. CARP uses a PING-PONG strategy to obtain the adjacent nodes information. Channel quality, residual energy and buffer space are also considered for selecting best relays. E-CARP [
23] improves CARP by considering the reusability of previously collected sensory data. The sensory data are required to be routed to a relay node, only when the difference between the current data and the previous one is obvious enough. Besides, the PING-PONG strategy is simplified and the route table remains unchanged if the network topology is relatively steady.
Recently, a group of balanced energy consumption routing protocols for UWSNs were proposed to balance the energy consumption in the network and then prolong the network life. Jinfeng Dou et al. presented a probability and sub-optimal distance-based lifetime prolonging strategy (PAS) [
24] for UWSNs. Energy consumption is balanced by carefully choosing transmission modes between single-hop direct transmission (DT) and multi-hop transmission (MT). The network is divided into many circular slices. Then a probability finding algorithm (PFA) can find a set of probabilities for each slice to decide the nodes’ transmission mode.
A similar balance transmission mechanism called BTM [
17] was proposed by Jiabao Cao et al. BTM divides the transmission process into two phases. Nodes operate an efficient routing algorithm in the routing set-up phase. In the stable data transmission phase, nodes determine one-hop or multi-hop data transmissions based on the adjacent nodes energy level. If the adjacent node energy level is lower than the energy level of the forwarding node, one-hop direct data transmission to the sink is performed. Or else, data can be forwarded to the sink via multi-hop transmissions. This scheme can balance the energy consumption between two adjacent nodes. However, each node only has one relay node and unbalanced transmissions still exist if nodes and traffic load are distributed unevenly.
Javaid et al. proposed a balanced energy consumption based adaptive routing [
16] (BEAR) scheme for IoT enabling underwater WSNs. In BEAR, the network field is divided into a series of cones, the traffic load can be evenly distributed by using zone-to-zone communications. Moreover, BEAR generally chooses two alternative relay nodes. One-hop direct transmissions are only carried out when the residual energy of the two alternative relay nodes are both lower than the average residual energy of the network. Results show that BEAR can prolong the network lifetime significantly.
Hanjiang Luo et al. presented two energy balanced strategies [
25] to maximize the lifetime of networks. The first is an energy balanced hybrid data propagation algorithm (EBH) which changes the transmission mode between multi-hop and one-hop transmissions according to the residual energy grade. The second is differential initial battery assignment strategy which tries to pre-assign differential initial battery power according to workloads in different nodes.
Although the above balance transmission mechanism can balance the energy consumption between different traffic load nodes and prolong the network lifetime to some extent, a great amount of energy is wasted due to the long range one-hop transmissions that balance transmission mechanism brings. Moreover, some UWSNs applications cannot bear such long range transmissions because of the heavy packet collisions and high requirements of the power amplifier. Therefore, their applications are limited in practical use.
5. Simulations
In this section, we present some simulation results to verify the effectiveness and validation of EBLE. The performance evaluation is done using the data from NS-3 simulator, which is a discrete event simulator for network simulation [
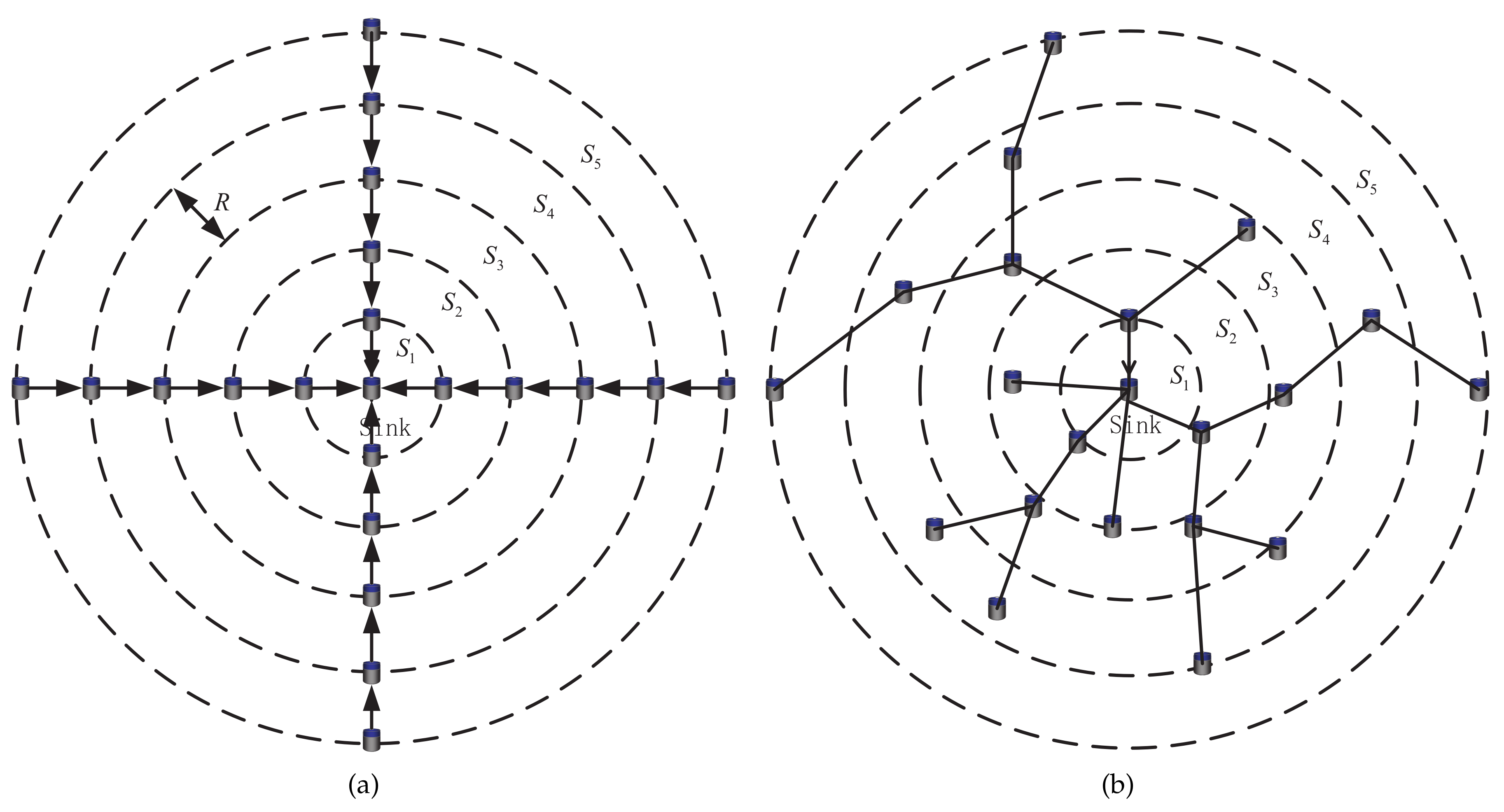
32]. In this section, we conduct simulations on two kinds of node distribution as shown in
Figure 5.
Figure 5a is a regular node distribution case. In this case, the network is divided into
n concentric circular rings
and each ring’s radius is
R. A sink node is deployed in the center of the network. The sensor nodes are deployed with equal spacing and each ring has the same number of sensor nodes. It is obviously seen that the node density is higher when the concentric circular rings are closer to the sink node. The sensor nodes that are closer to the sink have to transmit more data in multi-hop transmission mode as these nodes are required to relay more data loads to the sink.
Figure 5b is a universal case in which the sensor nodes are deployed randomly in a circle with radius
. The node density in each area of the network is a random value and the sensor nodes may not have more data loads when they are closer to the sink in multi-hop transmission mode. If the routing paths remain unchanged, some nodes may only need to send data packets that are created by themselves even when they are closer to the sink node. The relative simulation parameters are shown in
Table 2. We value our proposed EBLE protocol against BEAR [
16], BTM [
17] and one-hop direct transmission in terms of energy consumption, average residual energy, average end-to-end delay and network lifetime. Here we define that a node is considered to be dead when it consumes
battery power of itself and the network lifetime is defined in two versions: the
means the time when a first node is dead and the
means the time when 50% of the sensor nodes are dead. When a node is dead, it broadcasts an energy depletion notice packet to its neighborhood nodes and the dead node cannot transmit any packets any more. In the following simulations, we first conduct simulations in the regular node distribution case and then in the randomly deployed case.
5.1. Regular Node Distribution
In this part, we analyze the performance in the regular node distribution case. If not specified, the network is divided into five concentric circular rings and each ring contains four nodes. The radius
R of each ring equals 500 m. Here we assume that each sensor node generates a data packet and forwards it to the sink in each round. A more realistic data load distribution will be analyzed in the next section. First, we discuss the effect of maximal EL to our proposed algorithm.
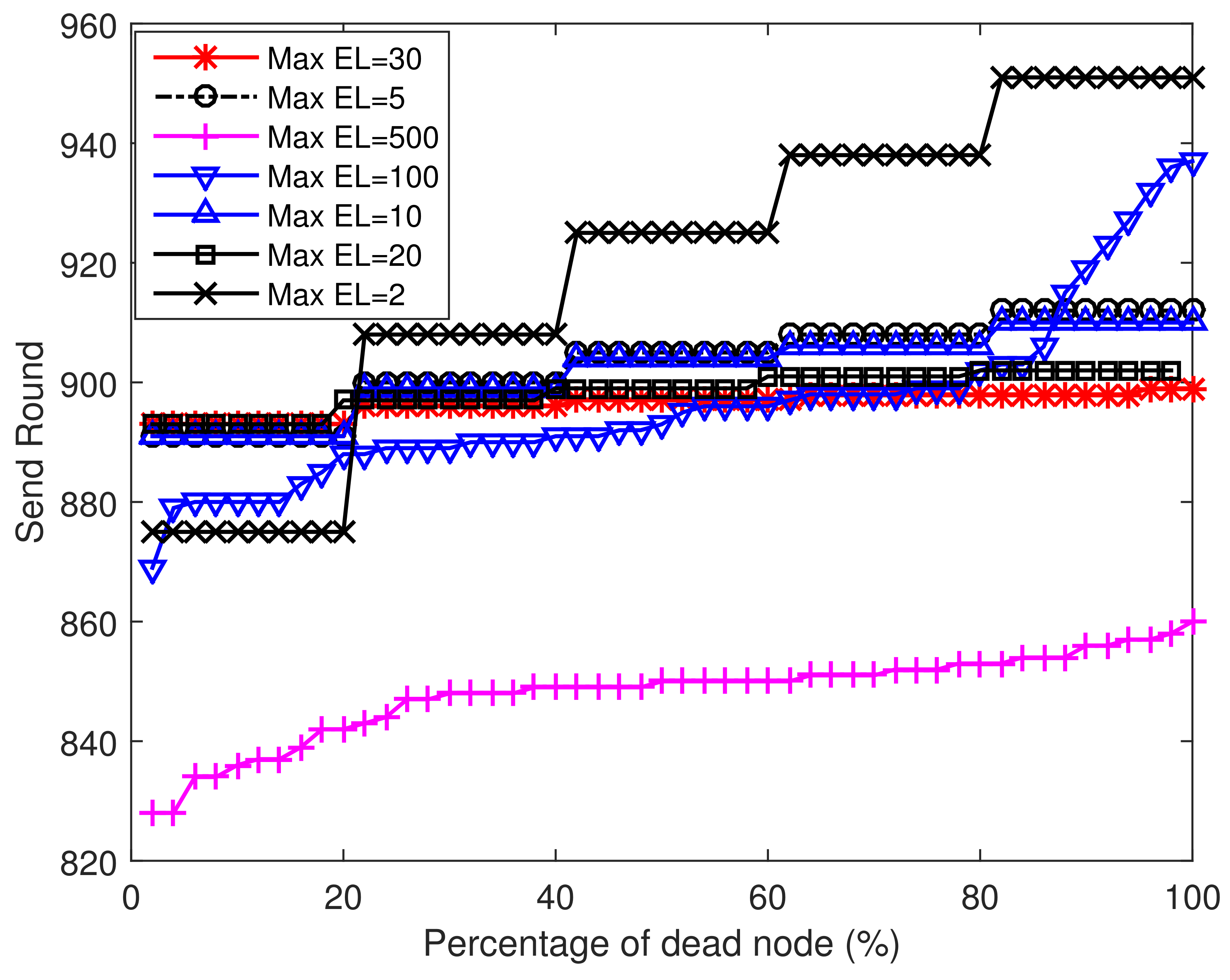
Figure 6 presents the sending rounds when different percentages of sensor nodes deplete their battery power. We simulate seven cases and the maximal EL varies from 2 to 500. From this figure we can see that the maximal EL can affect the network life to some extent. When the maximal EL becomes very large (e.g., 500), the sensor nodes consume a lot of energy on broadcasting and upon receiving EL changes. Therefore, the sensor nodes are unable to send more data packets. However, when the maximal EL becomes very small (e.g., 2), the sensor nodes are unable to distinguish remaining energy changes among neighborhood nodes and a lot of energy is wasted on long range transmissions. When the first node in the network is dead, the network sends the largest number of data packets at the case of maximal EL = 20 and maximal EL = 30. In addition, in the case that maximal EL = 20 performs better after 20% of nodes in the network are dead when compared with the case of maximal EL = 30. So in the next simulations, we set maximal EL = 20. It should be noted that the energy consumption of broadcasting residual energy level information and determining relative distance makes up only a small proportion of the total energy consumption. The reasons are listed as follows:
The network structure we consider here is a quasi-stationary one which means the sensor nodes rarely move after deployment. So nodes need to broadcast beacon messages only once to obtain the relative distance towards the sink node and their neighborhood nodes. In addition, the cost of broadcasting beacon messages becomes relatively low when comparing with continuous data transmissions.
Although each sensor node needs to broadcast its EL changes 19 times (maximal EL = 20) before it depletes all its energy, the frame length of beacon messages and EL change notice packet is small as these control packets have no data load. So the total energy consumption for transmitting control packets is low.
In order to further present the cost for control packets, we calculate the percentage of energy consumption for different transmitting phases. In this regular node distribution case, the result shows that the sum of energy consumption in broadcasting/receiving EL notice packets and beacon packets makes up 3.48% of the total energy consumption (maximal EL = 20). In addition, this small part of energy consumption can prolong the network lifetime significantly by energy balancing.
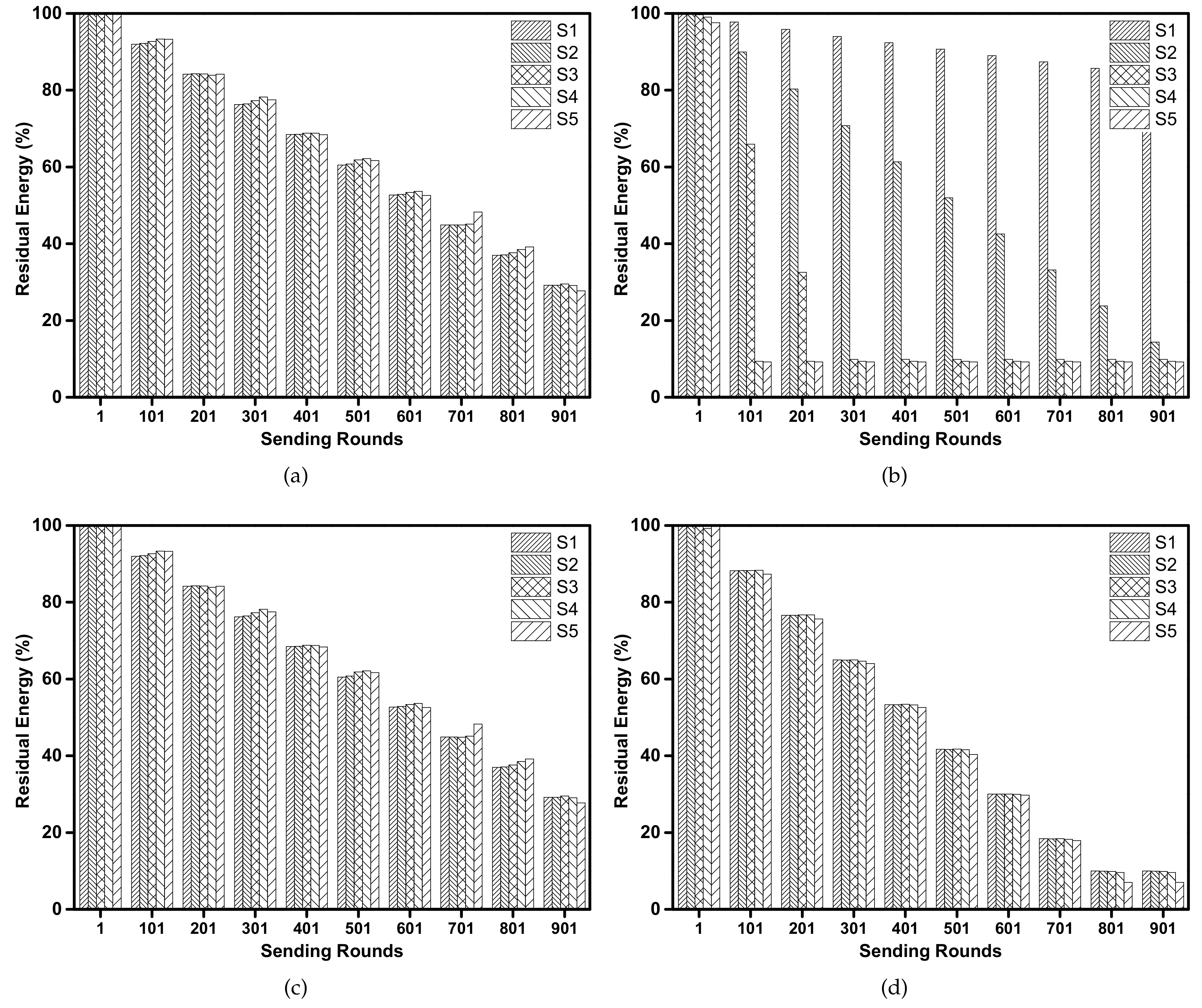
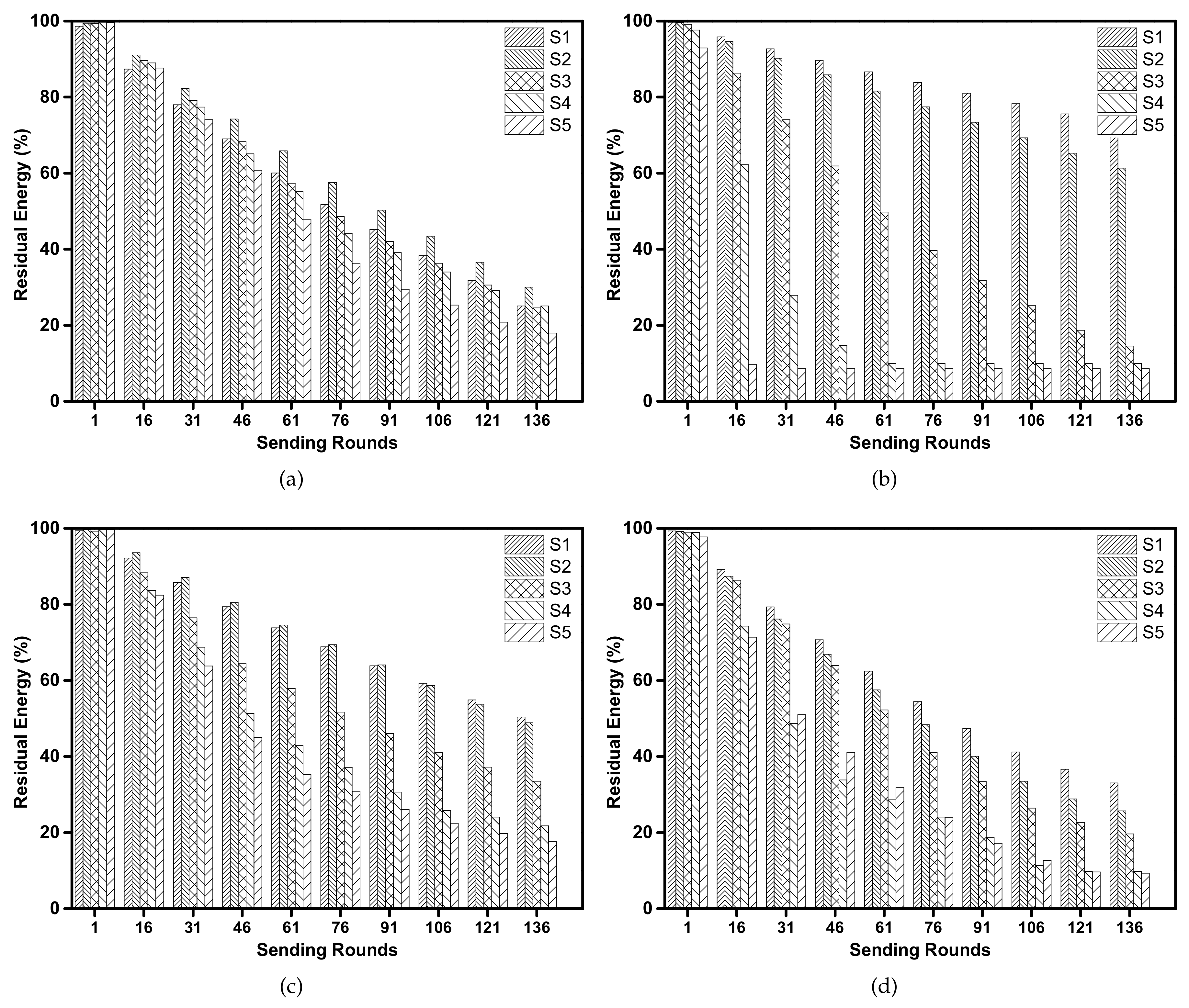
Figure 7 shows the percentage of node residual energy at different sending rounds for different protocols. It can be seen that the direct one-hop transmission protocol (
Figure 7b) is not suitable for long time transmissions because the sensor nodes far away from the sink consume their battery power at a high speed. When the sensor nodes in
are dead, the sensor nodes in
still have over 90% battery power. At sending round 901, about 75% of sensor nodes are dead and cannot transmit data packets any more. In BEAR protocol (
Figure 7d), the energy consumptions among sensor nodes in different circular rings are similar due to the use of energy balancing scheme. However, the overall energy consumption of BEAR is high as all sensor nodes are dead after 801 sending round. This is because in BEAR, each sensor node needs to broadcast control packets after each sending round to inform its neighbors of its residual energy. This operation wastes a significant amount of energy. In
Figure 7a,c, the BTM protocol and our proposed EBLE show a similar improvement in terms of energy consumption when compared with BEAR and direct one-hop transmission. All sensor nodes are kept alive at the 901 sending round and nodes in different circular rings consume their battery power at a similar speed. Although EBLE use more candidate forwarding nodes than BTM, there are no significant gaps in the energy consumption performance. This is because the nodes in the network are distributed regularly, which means the optimal energy efficient paths for multi-hop transmission are the same for BTM and EBLE. When the next candidate forwarder’s EL is lower than the sender, the sender cannot find other candidate sensor nodes which have more energy and are closer to the sink. So both BTM and EBLE change their transmission mode to direct one-hop transmission when their forwarders lack energy.
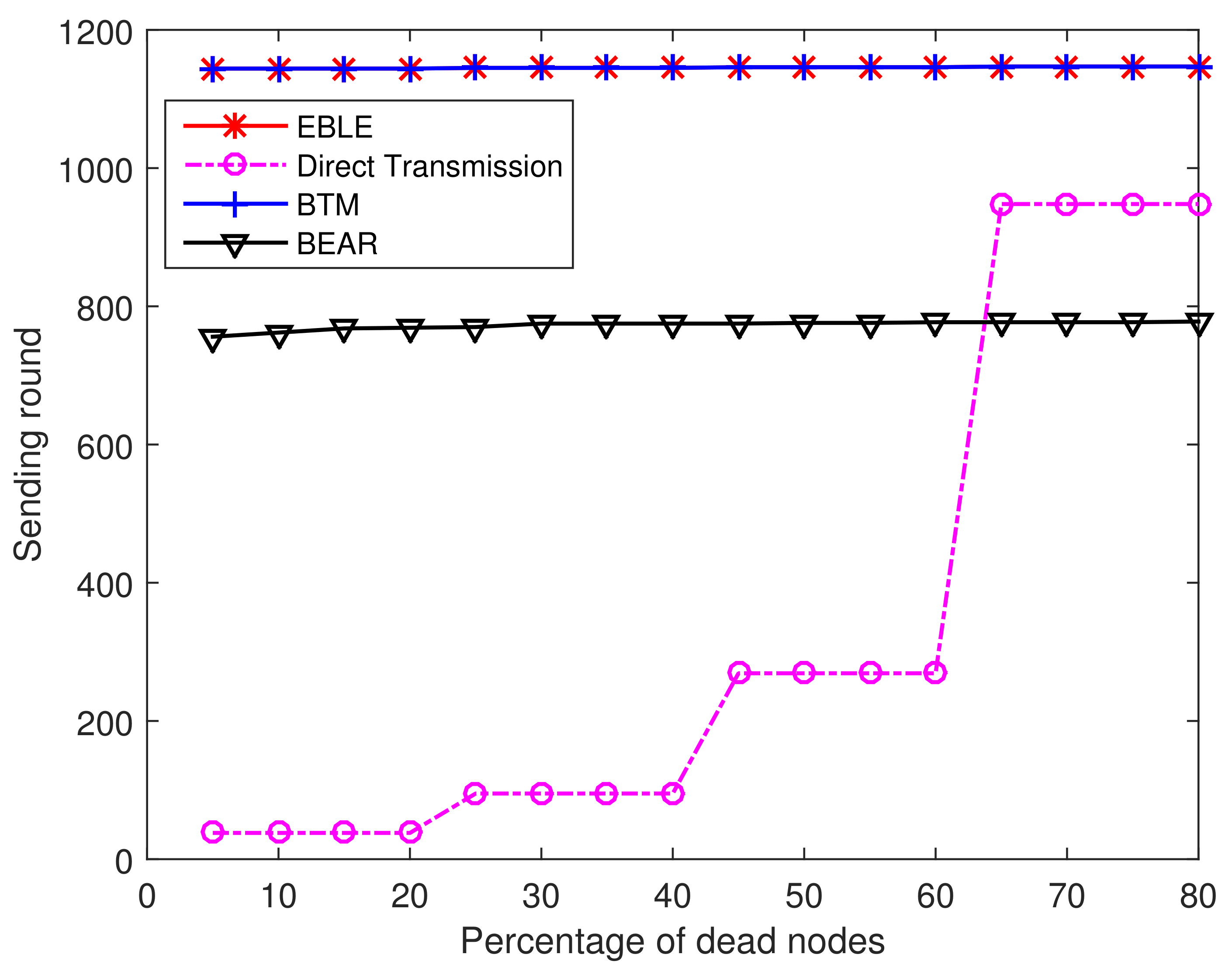
Figure 8 illustrates the percentage of dead nodes in varying sending rounds. For direct transmissions, 20% of the sensor nodes are dead at the 38th sending round and 70% of the sensor nodes are dead before the 270th sending round. So it is clearly seen that the direct one-hop transmission protocol cannot use the battery power in a balanced way. For BEAR, the energy consumption among different nodes are balanced and almost all sensor nodes are dead at the same time. However, BEAR uses part of its battery power to broadcast its residual energy information and makes the network lifetime end at an early time. BTM and EBLE achieve better performance in the regular node distribution case as the sensor nodes can transmit more data packets before their battery power is depleted.
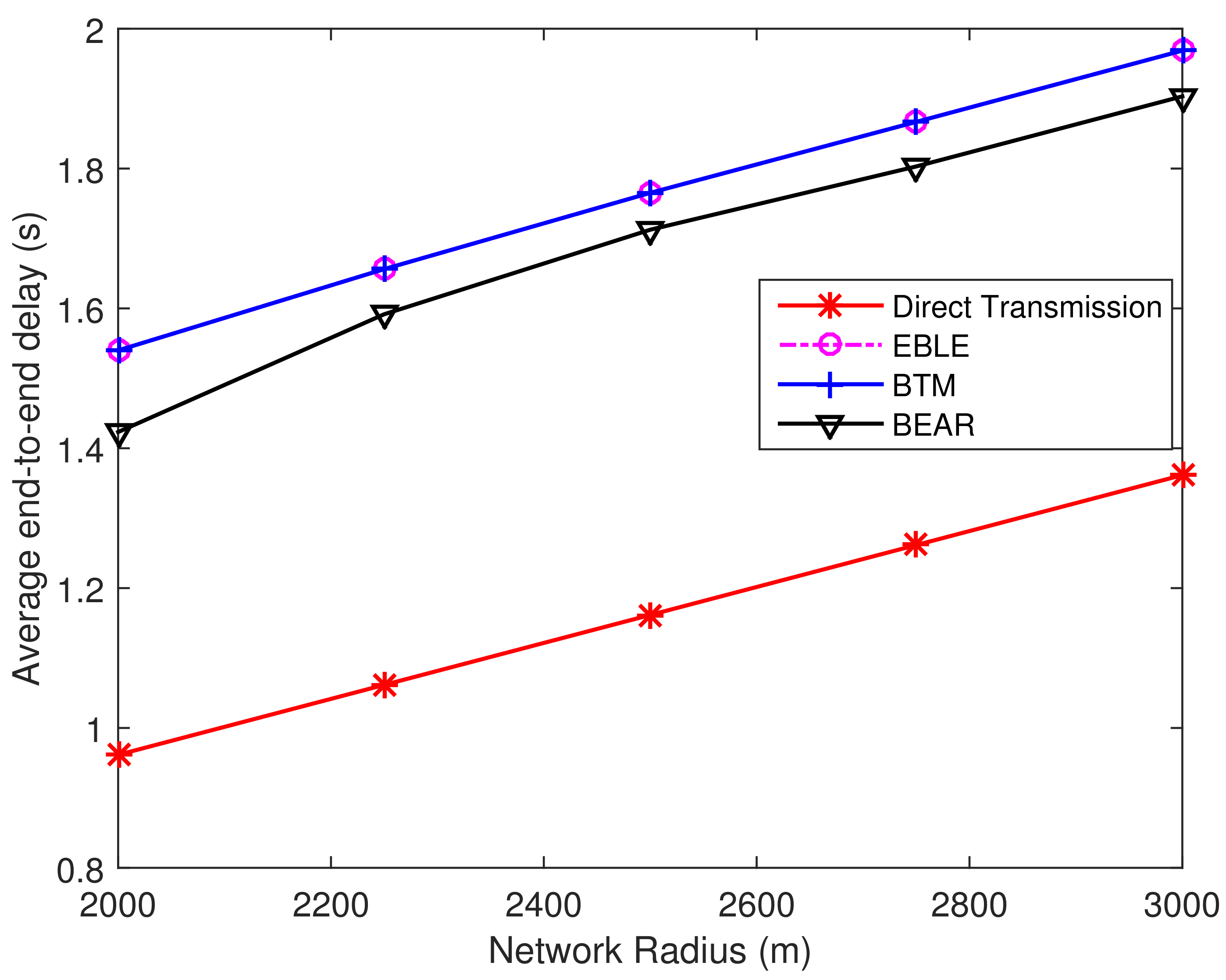
Figure 9 shows the average end-to-end delay for the four protocols. The communication delay for direct one-hop transmissions is the lowest because data packets are forwarded to the sink directly without any relay. Here we assume that each node spends 0.1 s to process the data and state transition (from receiving state to transmitting state). So each relay induces at least 0.1s delay for each sending process. The delay also comes from possible longer routing paths. This part of the delay cannot be avoided for multi-hop transmissions. So EBLE/BTM is slightly inefficient in network throughput, but the network lifetime is prolonged significantly for EBLE and BTM.
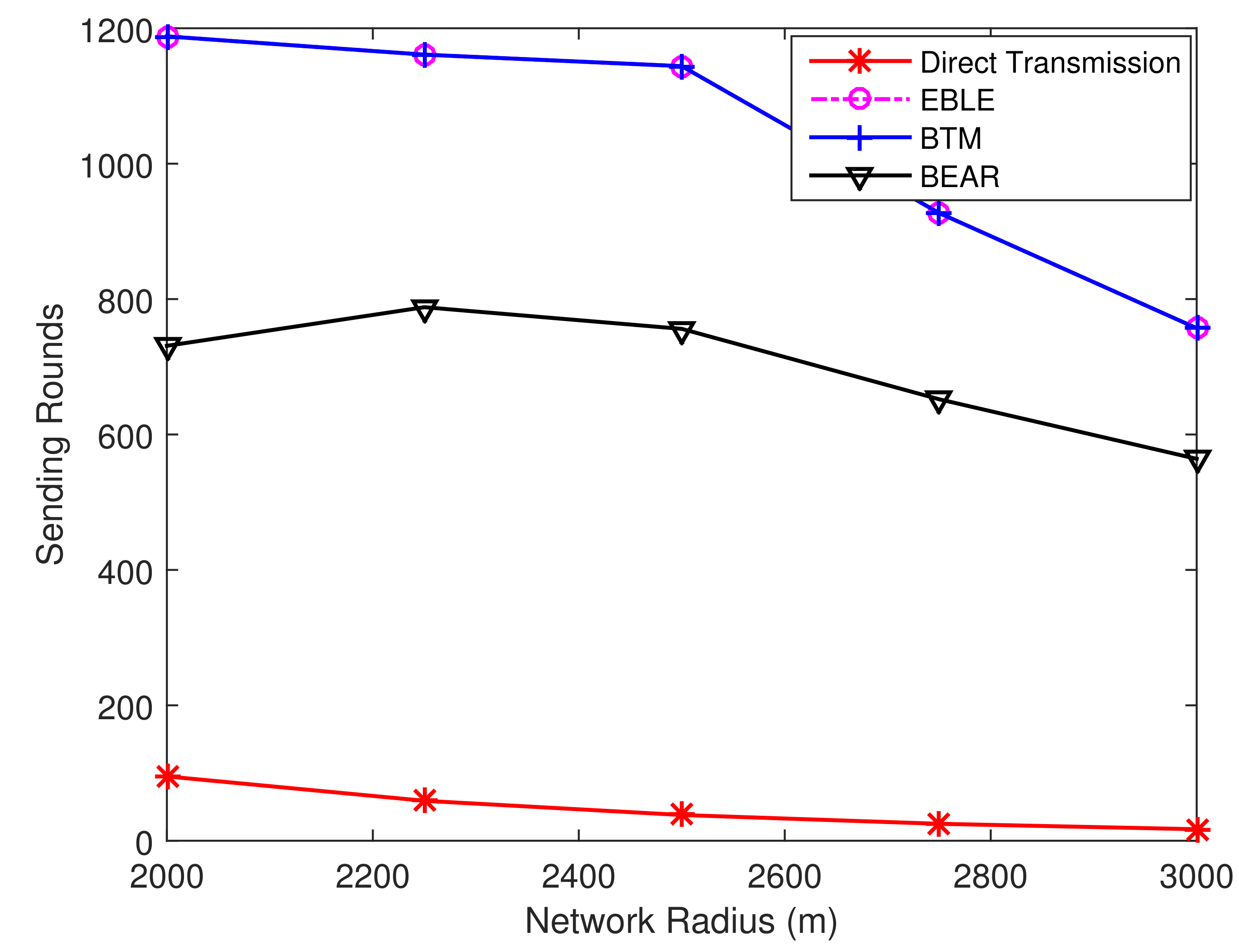
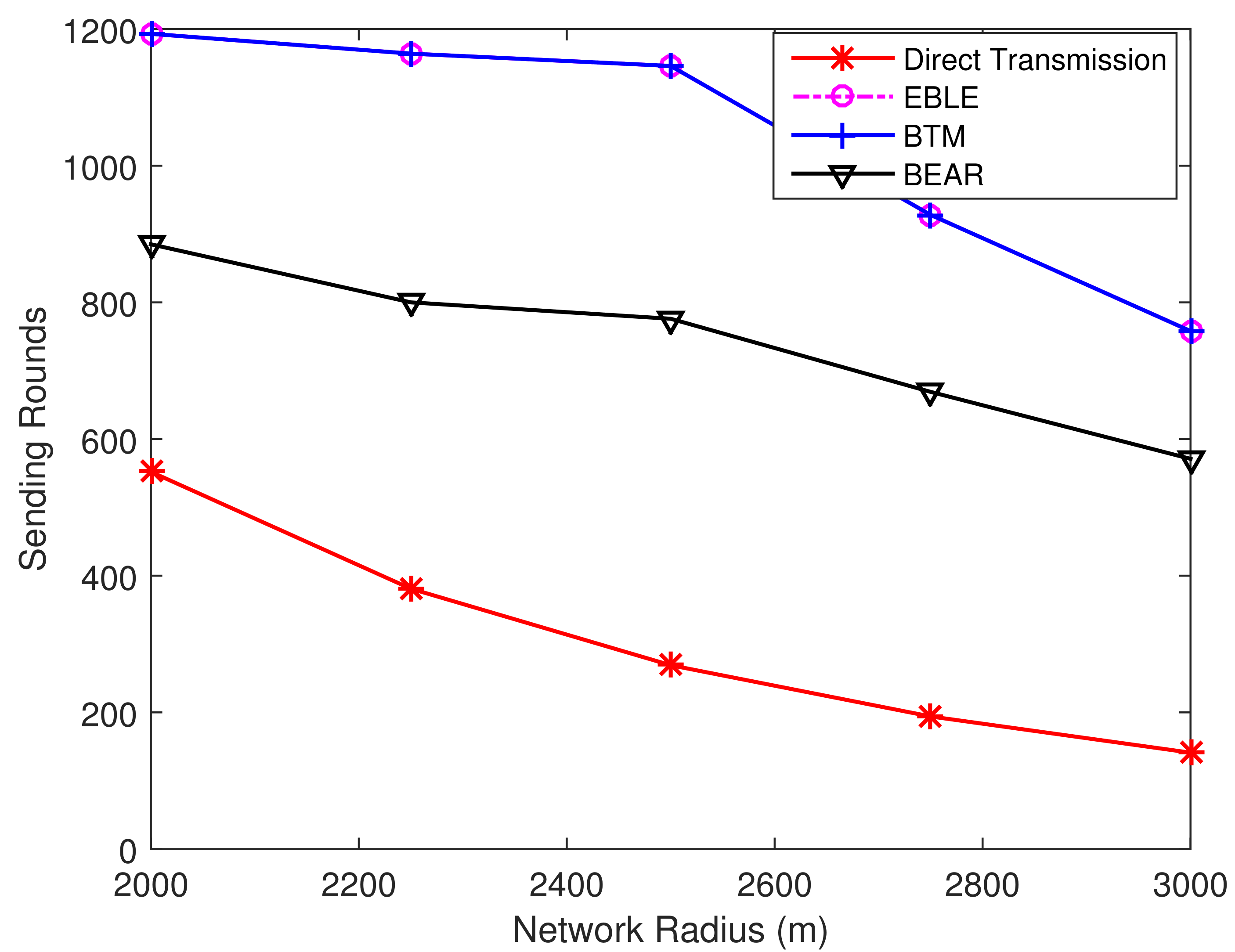
Figure 10 and
Figure 11 illustrate the
and
network lifetime performance, respectively. It can be seen that the time points when the first node is dead and 50% node are dead are the same for EBLE and BTM. However, parts of the sensor nodes in direct transmission mode deplete their battery power at an early time, which makes the network unable to sense some parts in the distribution area. So the network ends much earlier than EBLE. The lifetime performance of BEAR protocol improves compared with direct one-hop transmission protocol, but it still performs significantly worse than EBLE and BTM.
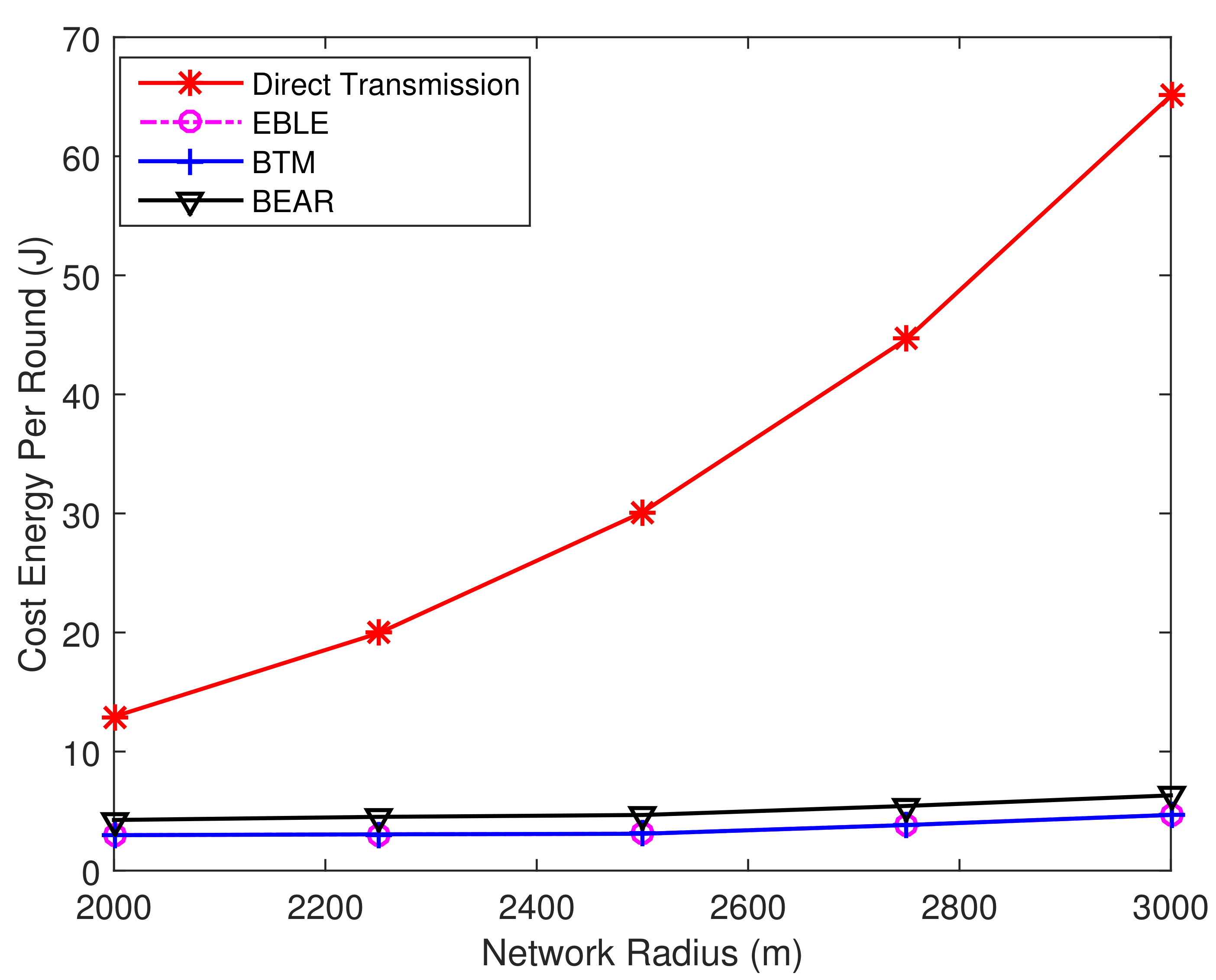
Figure 12 shows the overall network consumed energy per sending round for different protocols. The energy consumption for direct transmissions is high and the performance is even worse for long network radius. EBLE, BTM and BEAR utilize multi-hop transmissions to make the network more energy efficient. The average network consumed energy per sending round does not vary significantly with increasing network radius; EBLE is more energy efficient than BEAR and direct transmission. The performance of EBLE and BTM seems the same for the regular node distribution case.
5.2. Random Node Distribution
In this part, we value the performance among different protocols under random node distribution as shown in
Figure 5b. At each sending round, each node generates
X data packets randomly using Possion distribution. The probability distribution function is given in Equation (
22). Here we set
, so each node send 0.5 packets on average per sending round. The number of sensor nodes are 40 and the network radius is 2 km.
Figure 13 shows the percentage of residual energy at different circular rings for EBLE, direct transmission, BTM and BEAR. There is a significant difference in energy consumption at different rings for direct transmission protocol (
Figure 13b). Both BTM and BEAR improve the unbalanced energy consumption to some extent but the difference is still large. As the sensor nodes are not deployed evenly, nodes in some areas may deal with heavy data loads and BTM/BEAR fails to balance the energy consumption between these areas. Our proposed EBLE outperforms other protocols in terms of energy balancing. This is because that EBLE can balance the energy consumption with more candidate forwarding nodes. Once the most energy efficient path is energy limited, a suboptimal route can be chosen and the direct one-hop transmission only happens when all candidate forwarding nodes lack battery power.
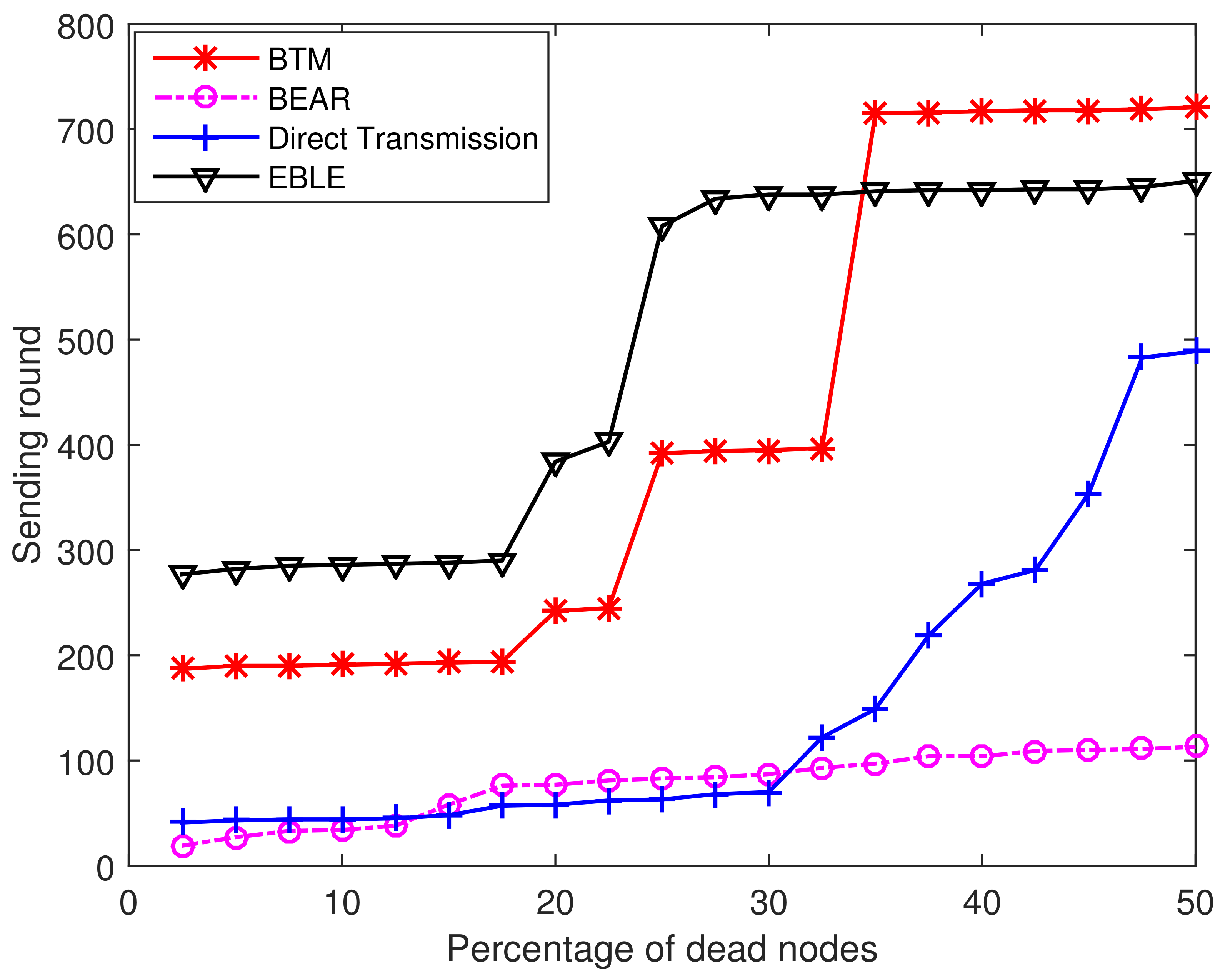
Figure 14 shows the percentage of dead nodes at different sending round for direct transmission, EBLE, BTM and BEAR. In this random node distribution case, EBLE can send the greatest number of packets before a first node in the network is dead. When a first node is dead because of low power, EBLE can have 90 more sending rounds than BTM. The performance of BEAR is even worse than the direct transmission in this case. This is because BEAR uses regular zones to choose the next forwarder. Only nodes in the same zone can be selected as next hop forwarders and this limits the choice of forwarders. When the nodes in the network are distributed randomly, there may not be enough nodes in some zones and BEAR has to choose to send data to the sink node directly. The energy cost for broadcasting residual energy also aggravates the energy consumption. It can also be seen that when 35% of the sensor nodes are dead, BTM can send more packets compared with EBLE. This is because BTM uses more direct transmissions than EBLE and some nodes in BTM may have few data loads, which makes the network keep a lot of energy when some nodes are unable to work any more. In network protocol design, we believe that the principle is to keep as many sensor nodes alive as possible because we are unwilling to lose the information of any interested area.
In order to make the simulation results more reliable, we change the random seed to conduct simulations on 10 different random node distributions.
Figure 15 shows the number of overall transmitted packets in the network when a first node is depleted of its battery power. The direct one-hop transmission protocol has almost the same number of transmitted packets over different node distributions. This is because the network life performance for direct transmission is always determined by the node farthest from the sink. Other protocols use energy balancing scheme to distribute the data load evenly. It is clearly seen that EBLE outperforms other protocols in terms of
network life. This is mainly due to our proper design of cost function and intelligent choice of next forwarders. In BTM, only one node has a unique optimal forwarder. If this forwarder is in low battery power state, BTM has to send data directly to the sink. However, EBLE selects the next hop forwarders by comparing their energy consumption per effective distance. The node with the lowest energy consumption per effective distance is chosen as the best forwarder. When the residual energy of the best forwarder is relatively low, EBLE selects the suboptimal node with higher residual energy for relaying data instead of long range one-hop direct transmission to the sink node. So BTM performs worse than our proposed EBLE in the random node distribution case. From the 10 groups of results in
Figure 15, we can calculate that EBLE can send 62.79% more packets than BTM on average before a first node is dead.
To explain the performance fully, we present the
network lifetime performance as shown in
Figure 16. In this case, EBLE no longer performs better than BTM. This is because EBLE balances the network energy consumption to ensure that all the sensor nodes can work. In BTM, some nodes may only have a few data loads, therefore these nodes can still work for a long time when other nodes are dead. We believe that this unbalanced energy consumption is unhealthy for underwater sensor networks. So we mainly focus on the optimization of
network life performance.
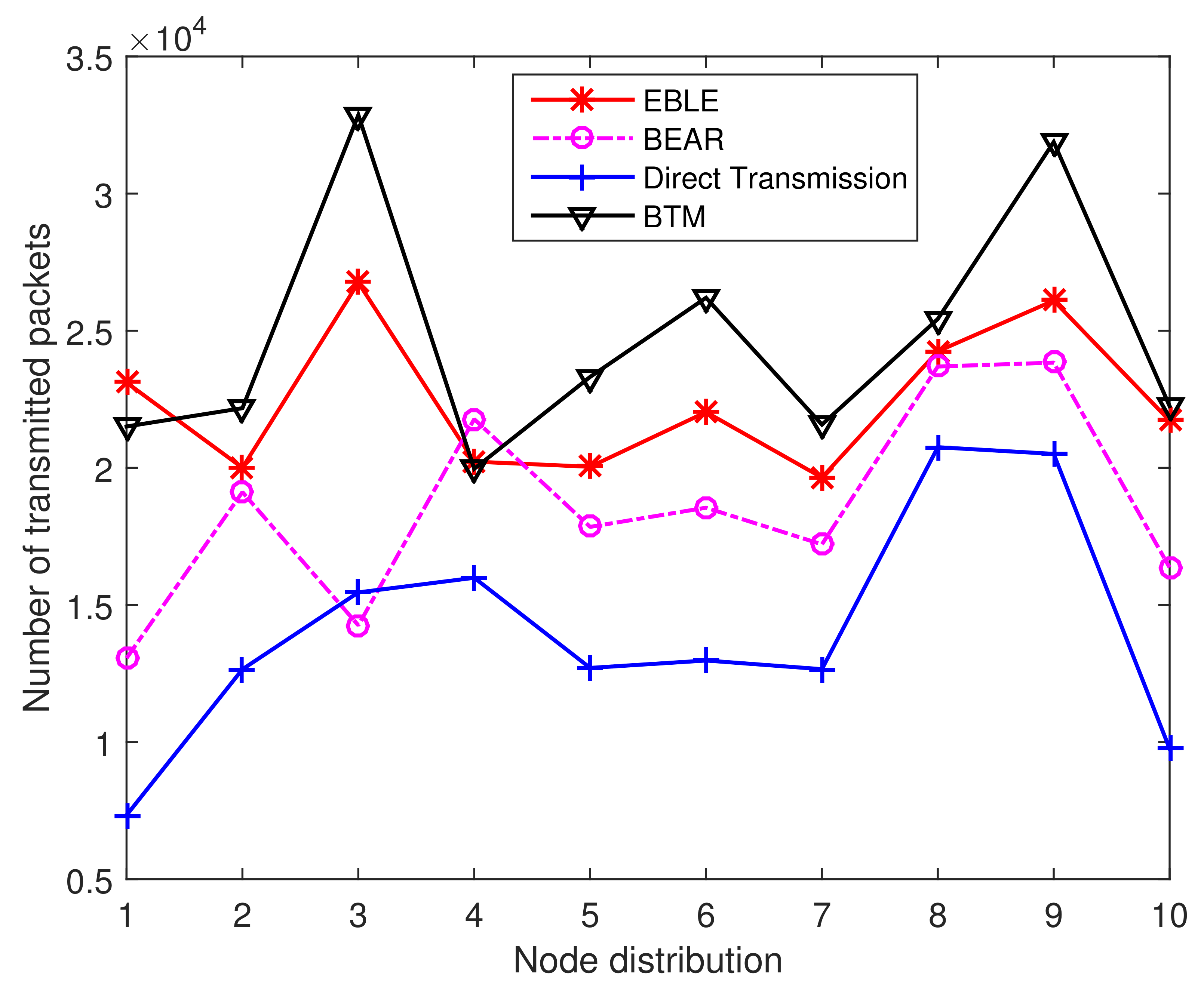
Next, we consider the end-to-end delay performance as shown in
Figure 17. It can be seen that the average time for transmitting one packet in EBLE is prolonged. This is because EBLE is more likely to divide long range direct transmissions into multi-hop transmissions. In our settings, each relay needs 0.1 s to handle the received data packets and change its transducer state from receiving mode to transmitting mode. So the more relays that are used, the longer time a data transmitting process needs. The irregular paths also induce some propagation delay to some extent. So our design may not be suitable for some delay sensitive applications. However, as the induced delay is not significant and is about 1.8 times that of the direct transmissions, EBLE can be used in most long time data transmission cases.
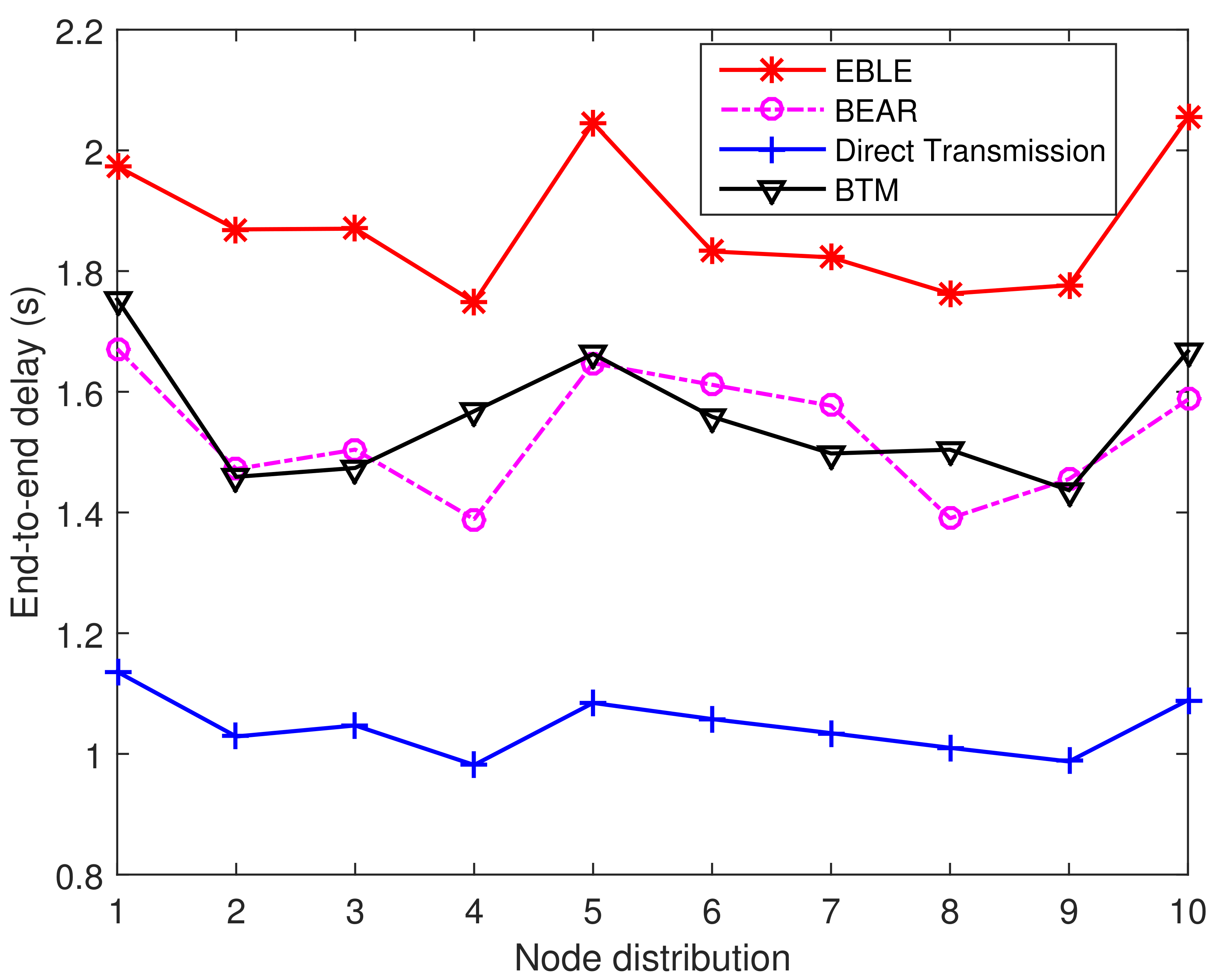
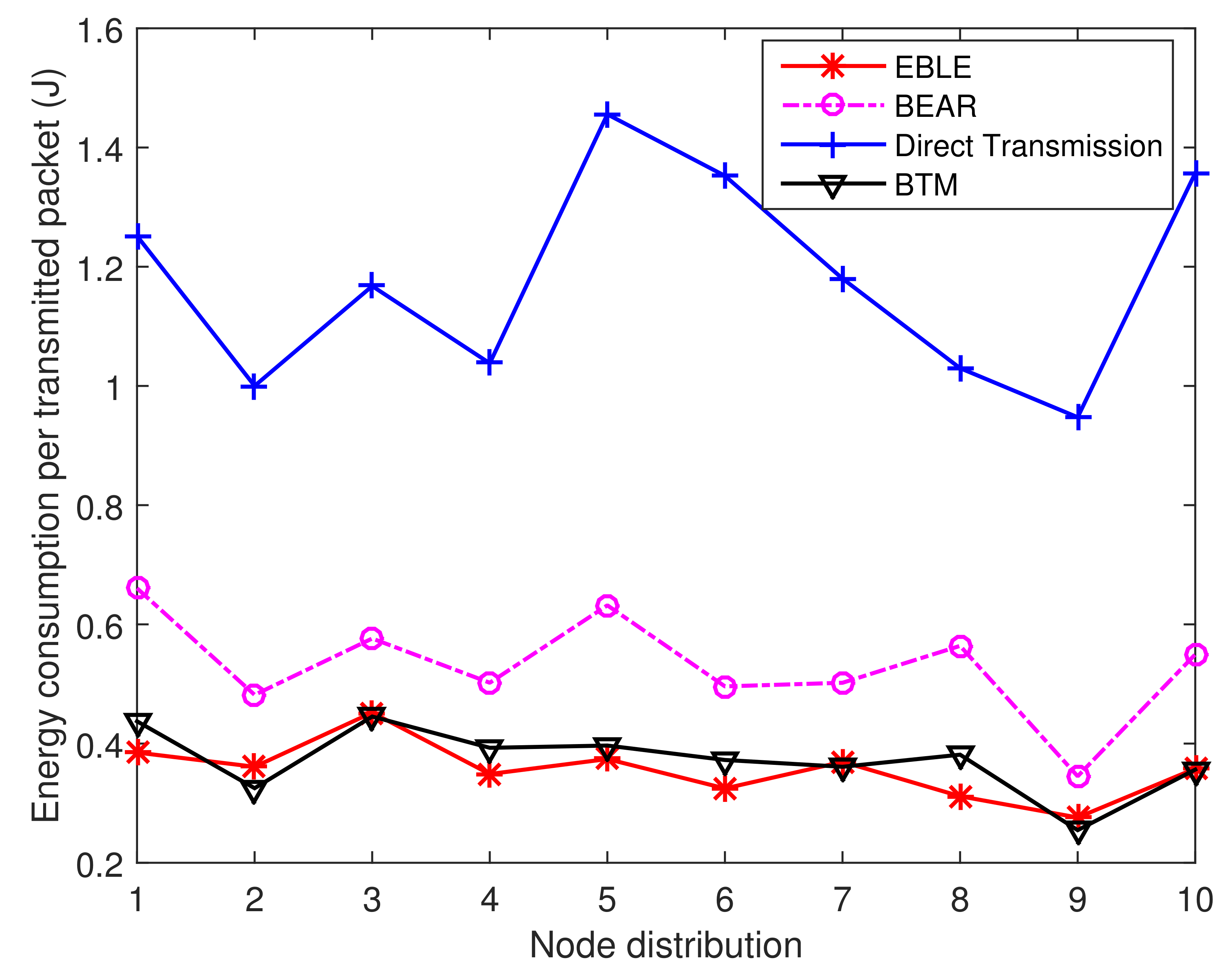
The energy consumption per transmitted packet for different protocols is given in
Figure 18. The energy consumption for direct transmission protocol is much higher than other protocols because long-range direct transmissions are not energy efficient and the sender has to send data at a higher power to reach the sink node far away. The performance of BTM and EBLE is similar and they are both better than BEAR and direct transmission. This is because EBLE selects the next hop forwarders by comparing their energy consumption per effective distance. The node with the lowest energy consumption per effective distance is chosen as the best forwarder. So long range direct transmissions can be divided into multi-hop transmissions effectively.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}