Cellular-V2X Communications for Platooning: Design and Evaluation

 ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
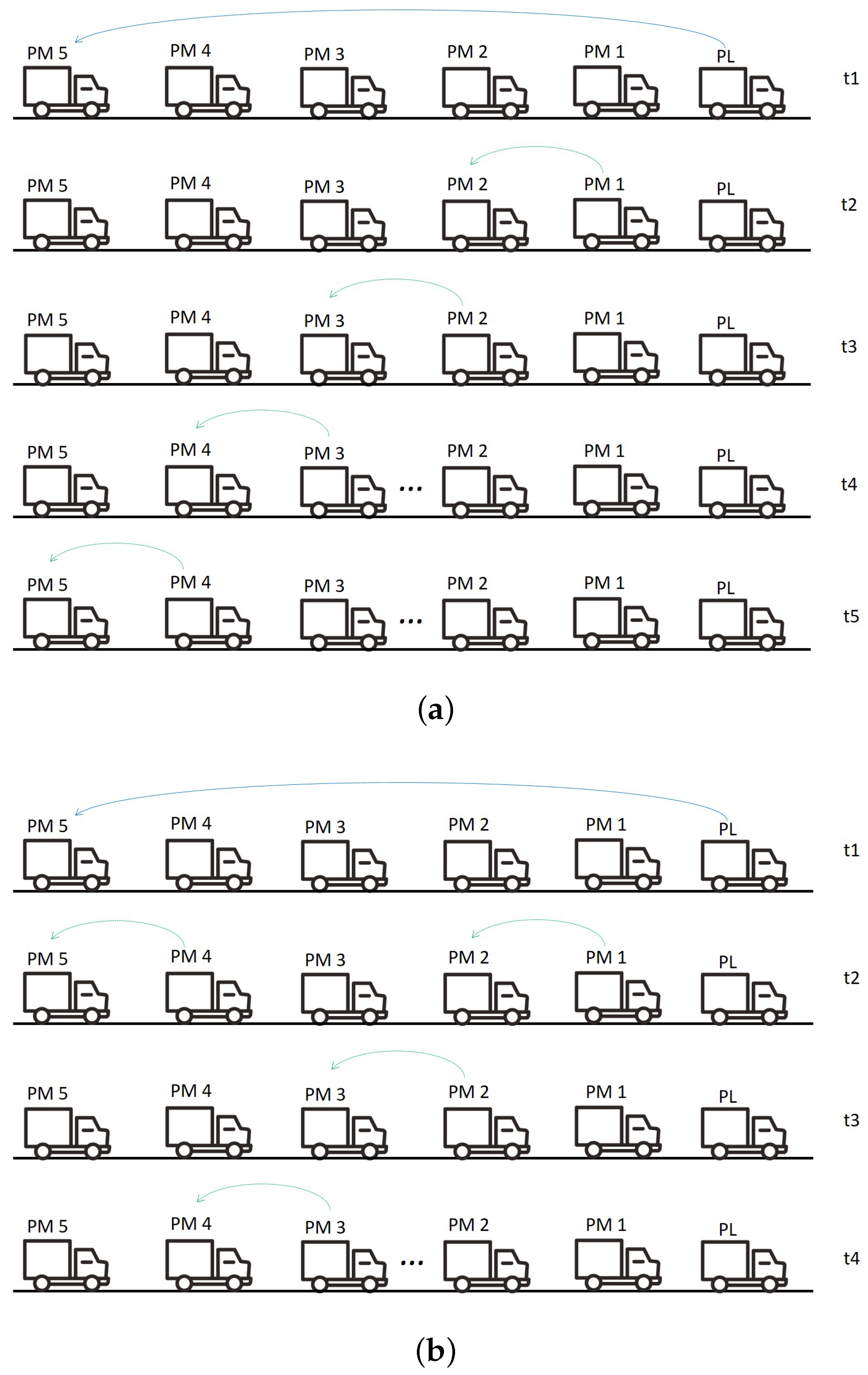
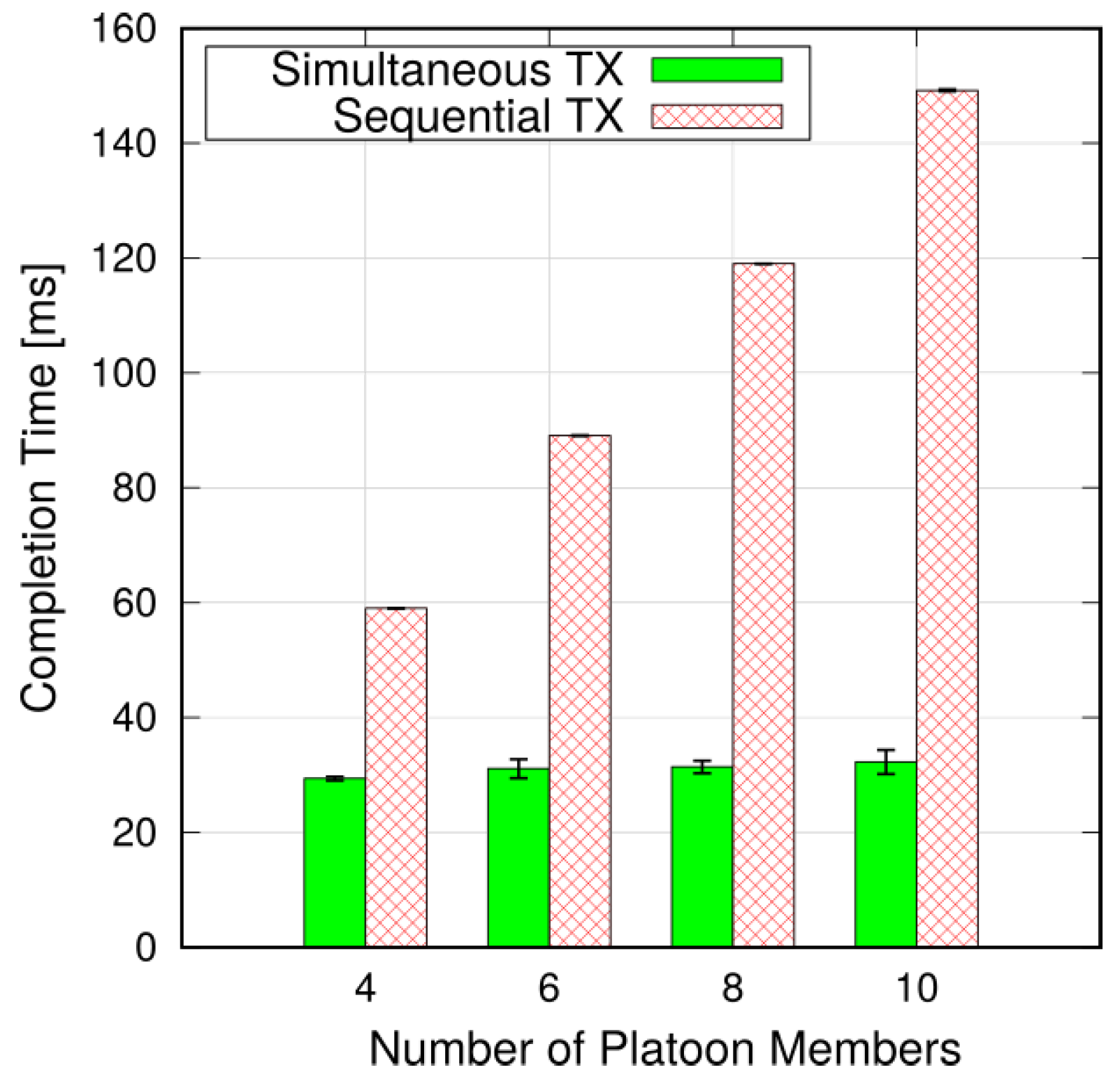
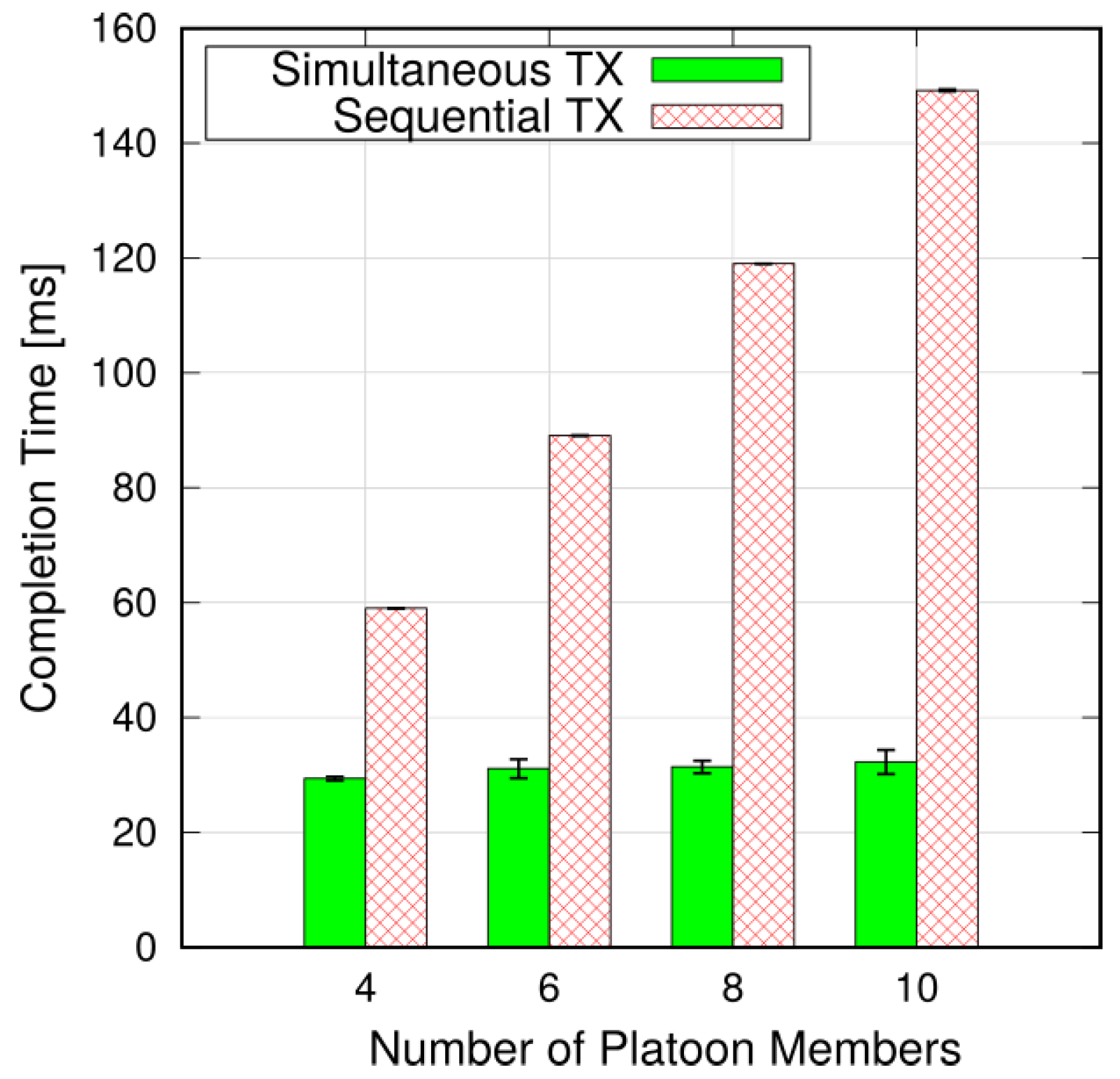
- Overcome the current lack of either a legacy or a dominant solution to manage platooning applications with LTE/C-V2X and analyse the viability and performance of the dynamic scheduling [25] for V2X sidelink platoon communications. We consider two possible ways of implementing dynamic scheduling; both modes are not currently specified by 3GPP for C-V2X. With the first mode, called sequential, somehow reminiscent of TDMA solutions based on IEEE 802.11p—till now the only investigated access technology for platooning [6,7,8]—platoon vehicles ask the eNodeB for radio resources as soon as they receive a CAM from the preceding vehicle. The second mode, called simultaneous, allows all vehicles in the platoon to send their requests to the eNodeB soon after receiving the CAM from the leading vehicle, and supports simultaneous CAM transmissions between couples of vehicles, sufficiently spaced apart within the platoon, by using the same resource blocks.
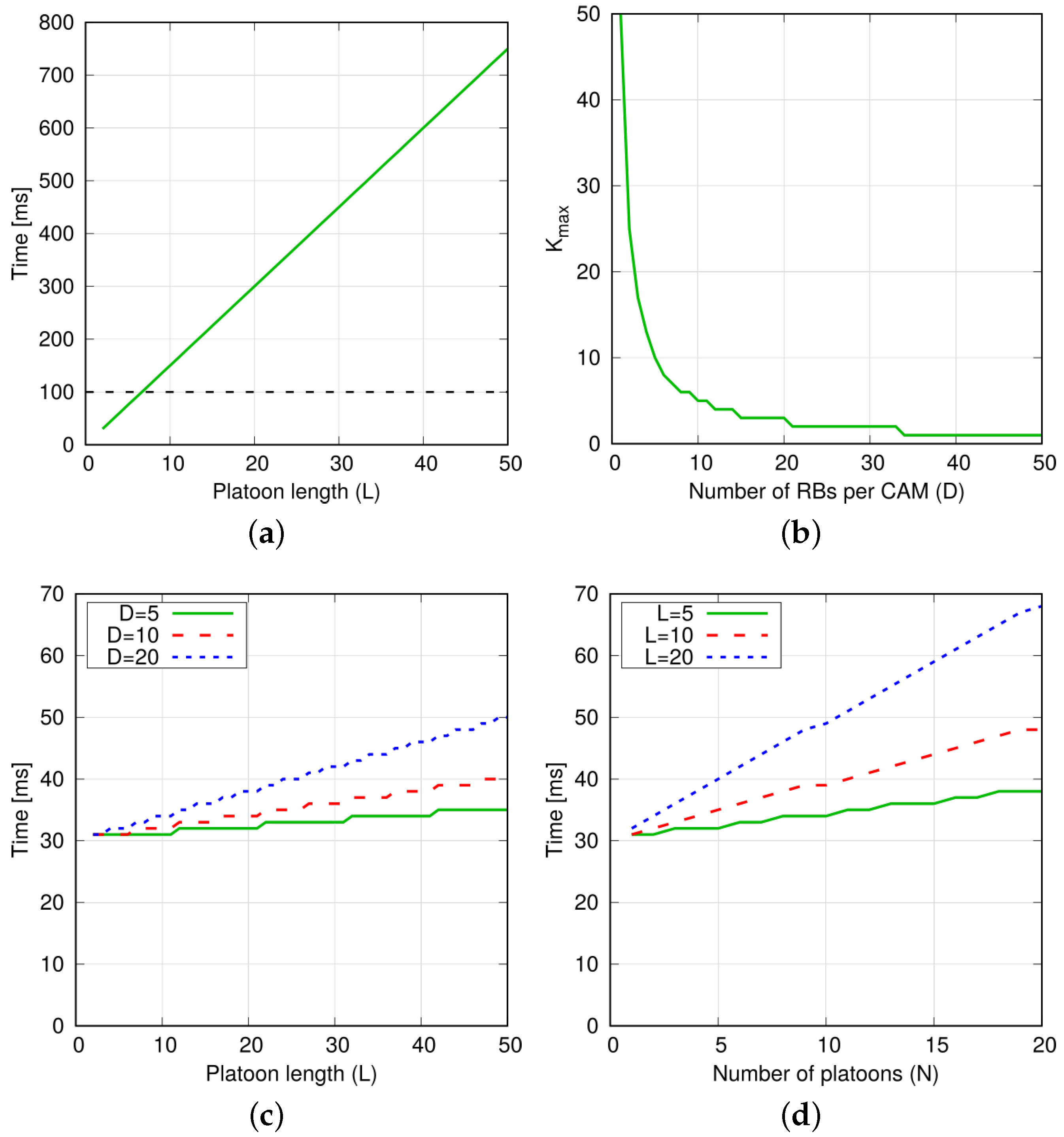
- Derive theoretical bounds for the time required to disseminate CAM messages within a platoon, when varying the composition of the platoons, CAM size and network parameters, for the purpose of a preliminary comparison between the sequential and simultaneous transmission schemes.
- Carry out extensive simulations using SimuLTE [26], a system-level simulator based on OMNeT++ [27] that accurately implements the whole LTE protocol stack, from the radio propagation dynamics and access technology to the application data pattern, which we extended so as to support the CAM exchange within a platoon and the proposed scheduling solutions. Results have been provided in a multi-platoon scenario under a wide range of settings. The impact of different scheduling schemes (sequential vs. simultaneous) and resource allocation policies (based on channel quality feedbacks; with and without frequency reuse) is evaluated in a stepwise manner to better understand how each parameter affects the reliability and latency performance of the CAM exchange within a platoon and in multiple platoons.
2. An Overview of Platooning
3. Cellular V2X: A Primer
V2V Communications: From LTE D2D to C-V2X
- Mode 3 (a.k.a. scheduled), according to which resource scheduling and interference management over the PC5 interface are assisted by eNodeBs via control signaling over the LTE-Uu interface.
- Mode 4 (a.k.a. autonomous), according to which V2V resource scheduling and interference management over the PC5 interface are supported based on distributed algorithms implemented between the vehicles.
4. Platooning in Cellular V2X
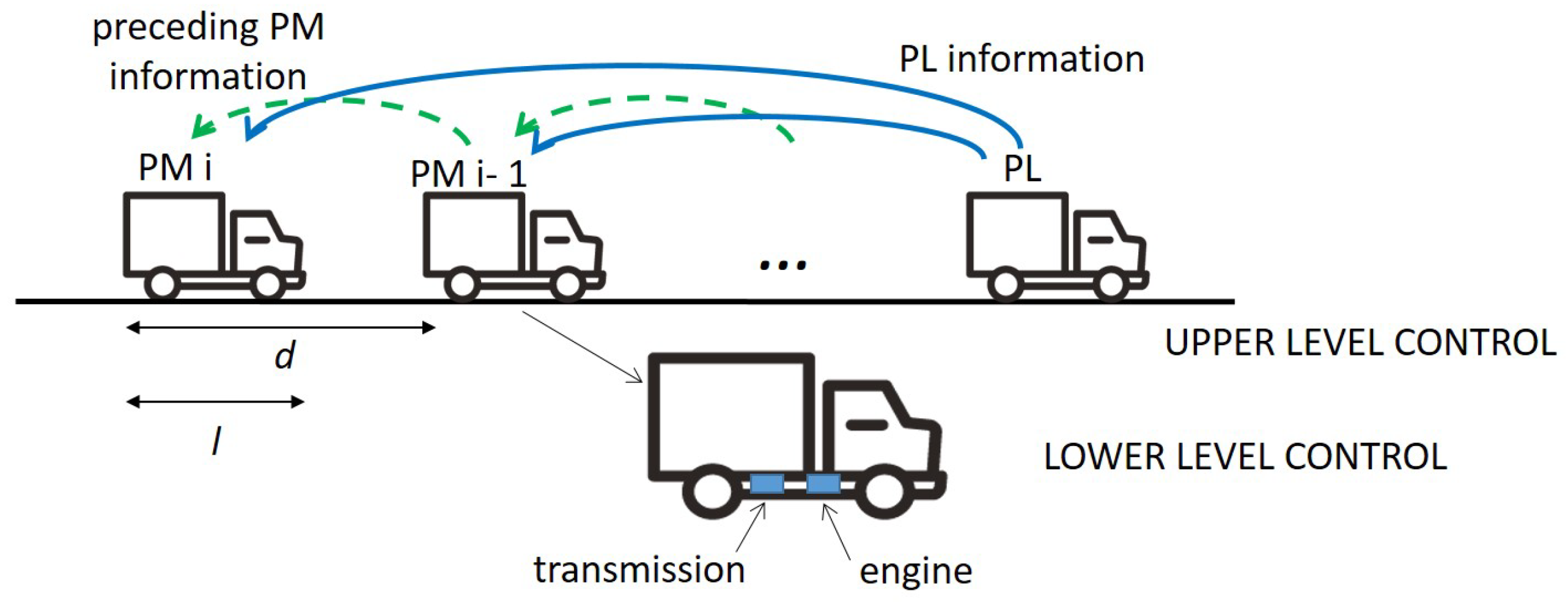
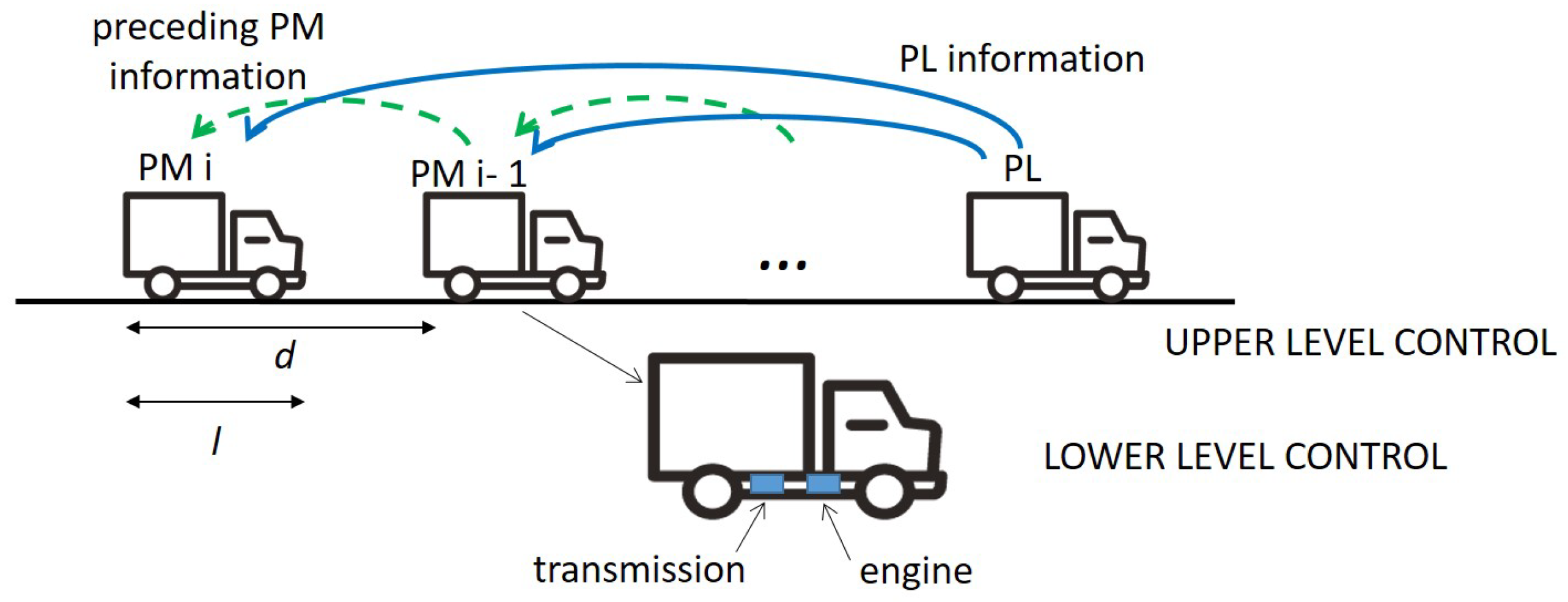
4.1. System Model
4.2. CAMs Exchange in the Platoon
- PL-to-PMs communications. Initially, a PL transmits a CAM to all the PMs.
- PM-to-PM communications. Once the CAM from the PL is received by the platoon, each PM transmits its own CAM to update the one just behind.
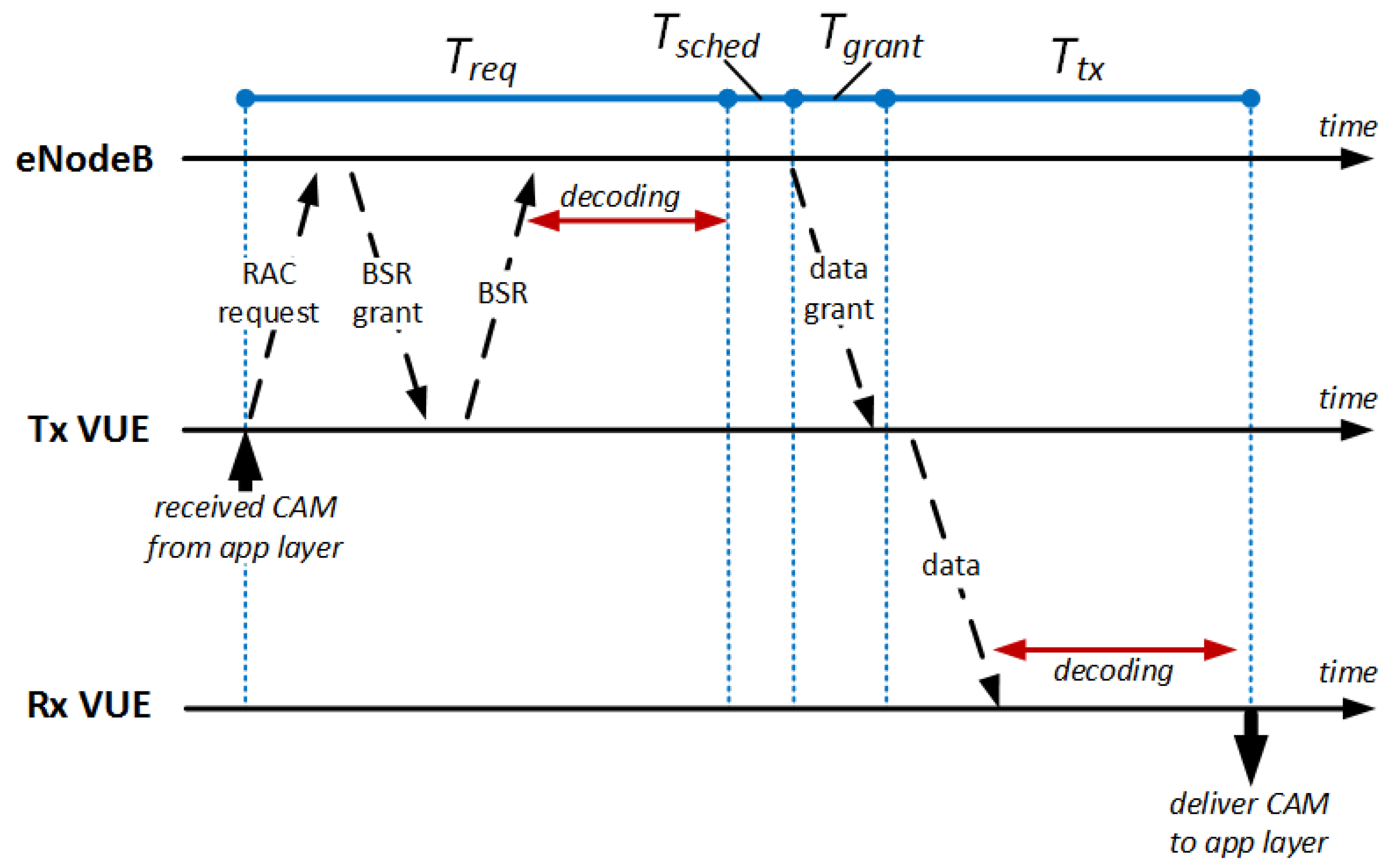
4.3. Mapping to C-V2X
4.3.1. PL-to-PMs Step
4.3.2. PM-to-PM Step
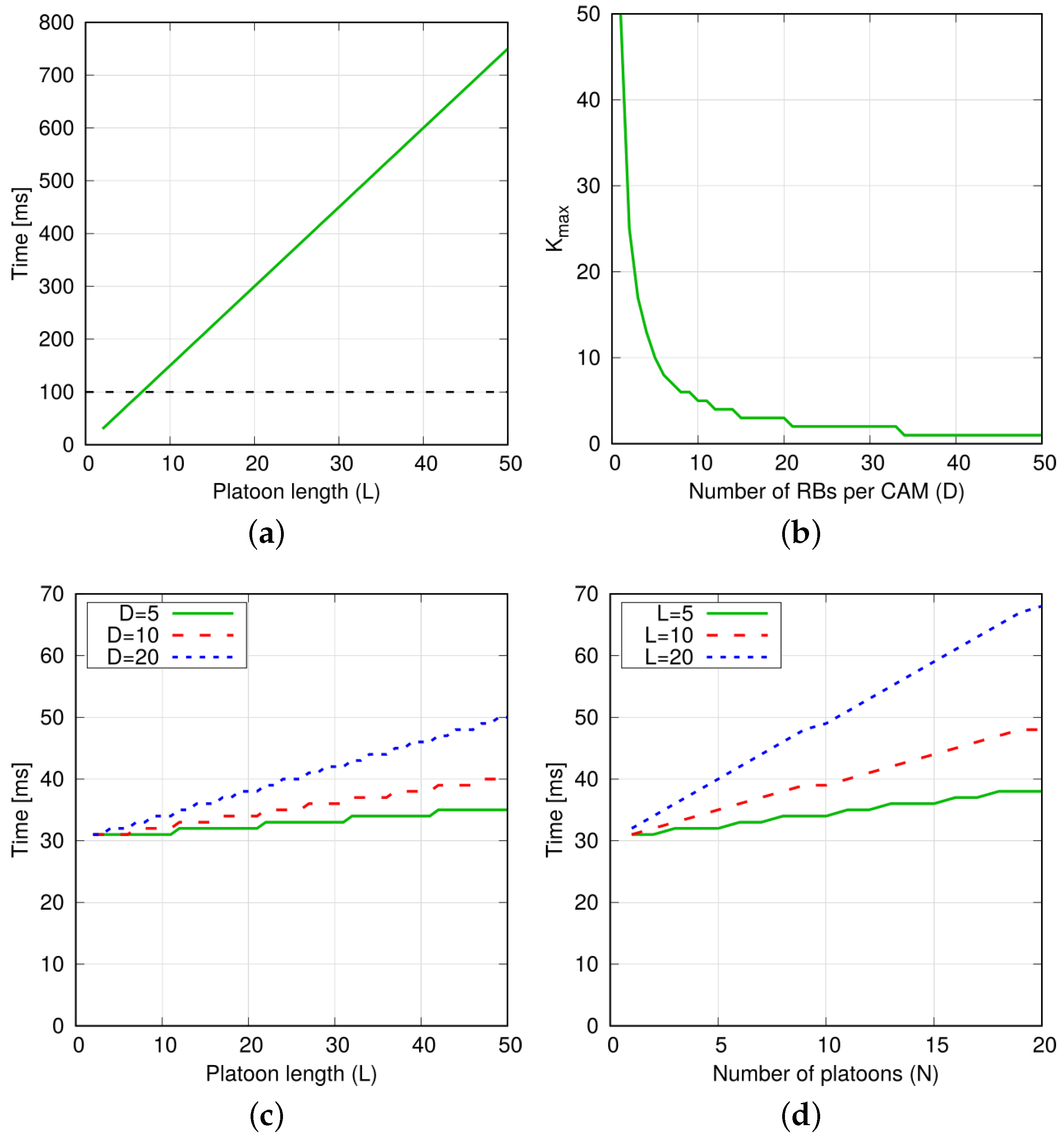
5. Theoretical Bounds
6. Performance Evaluation
6.1. Simulation Tool
6.2. Scenario Configuration
6.3. Metrics
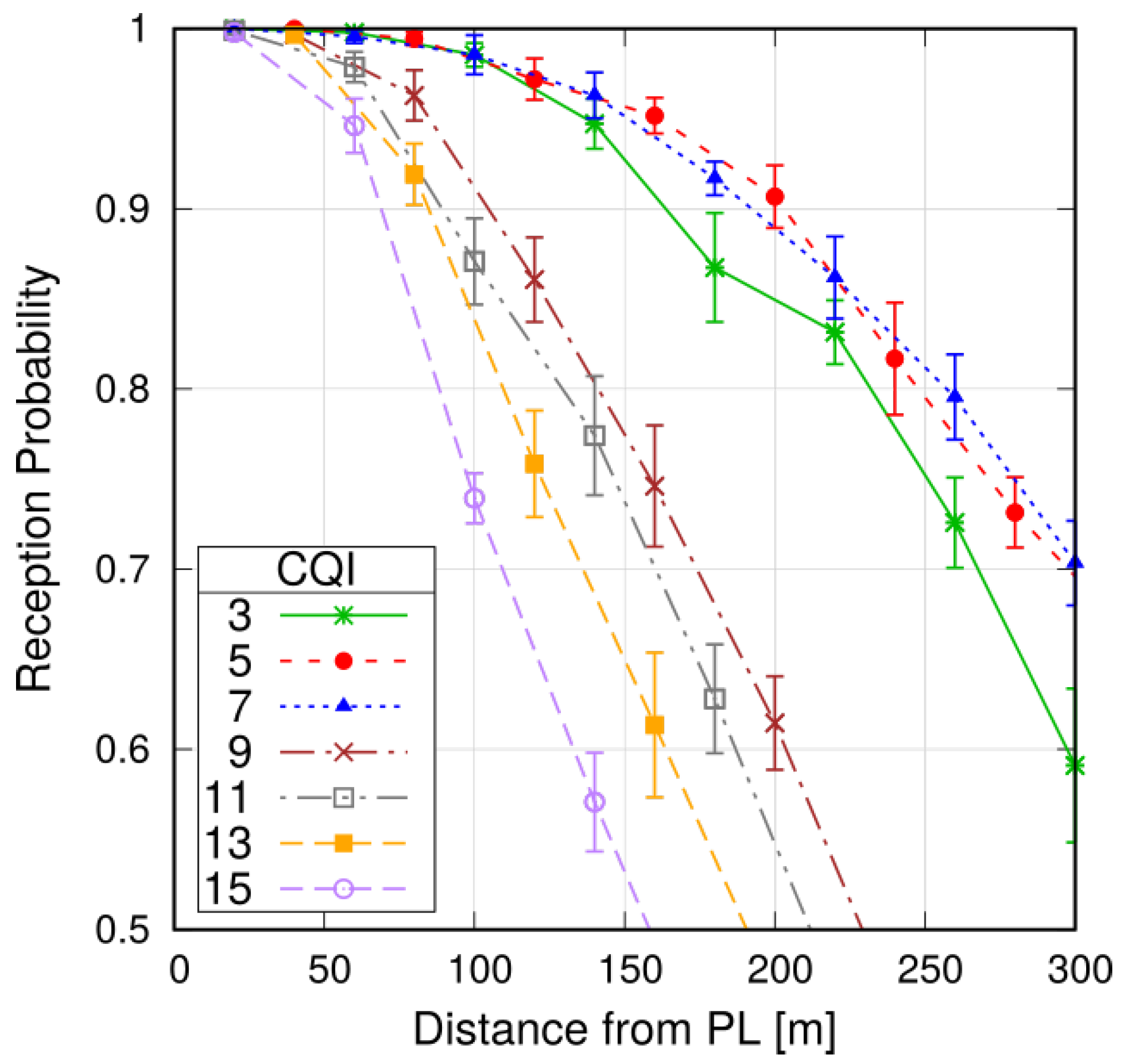
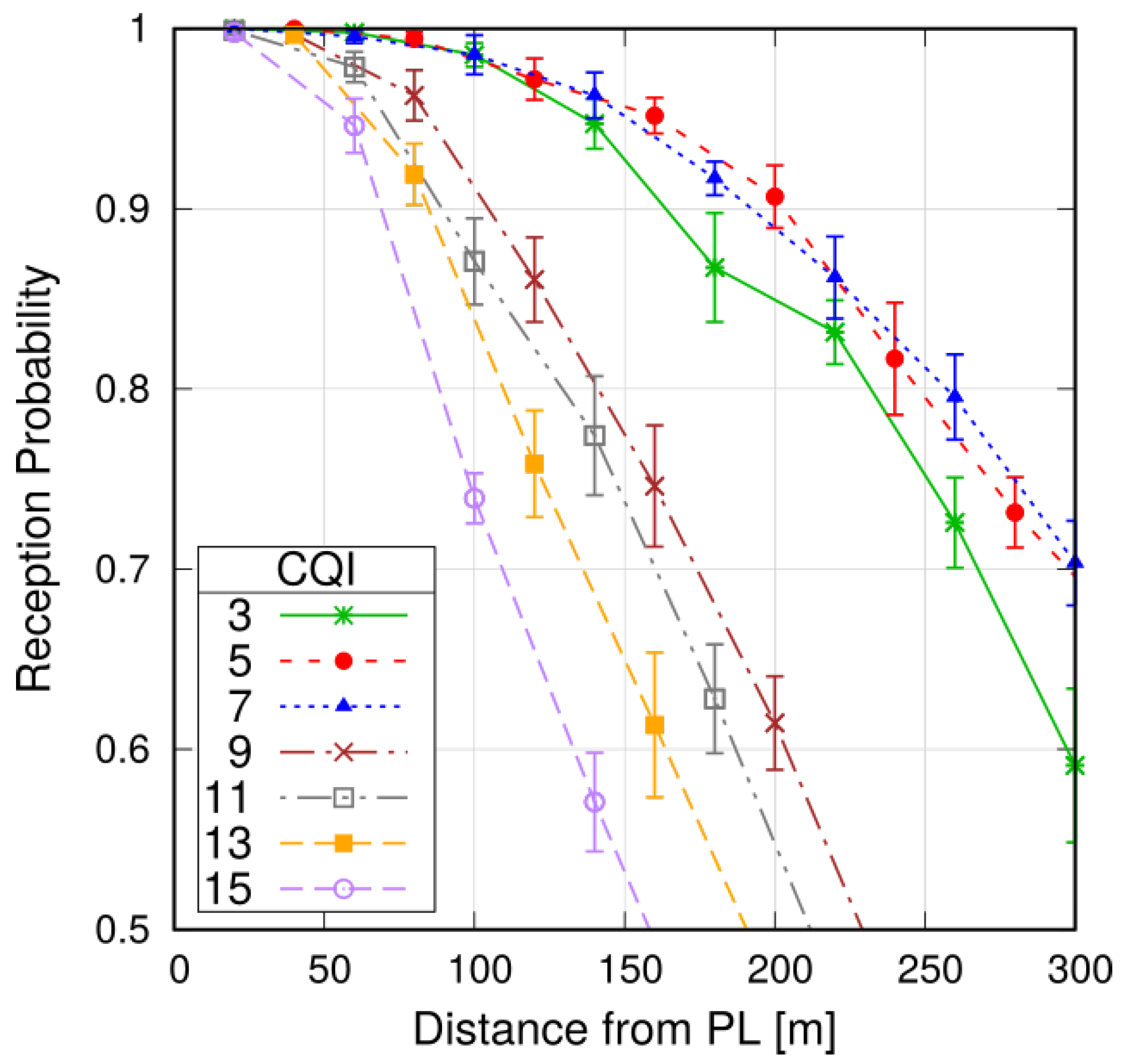
- Probability of successful reception of the PL-to-PM CAM against the distance from the PL. It is derived as the number of successfully received CAMs over the number of transmitted CAMs by the PL.
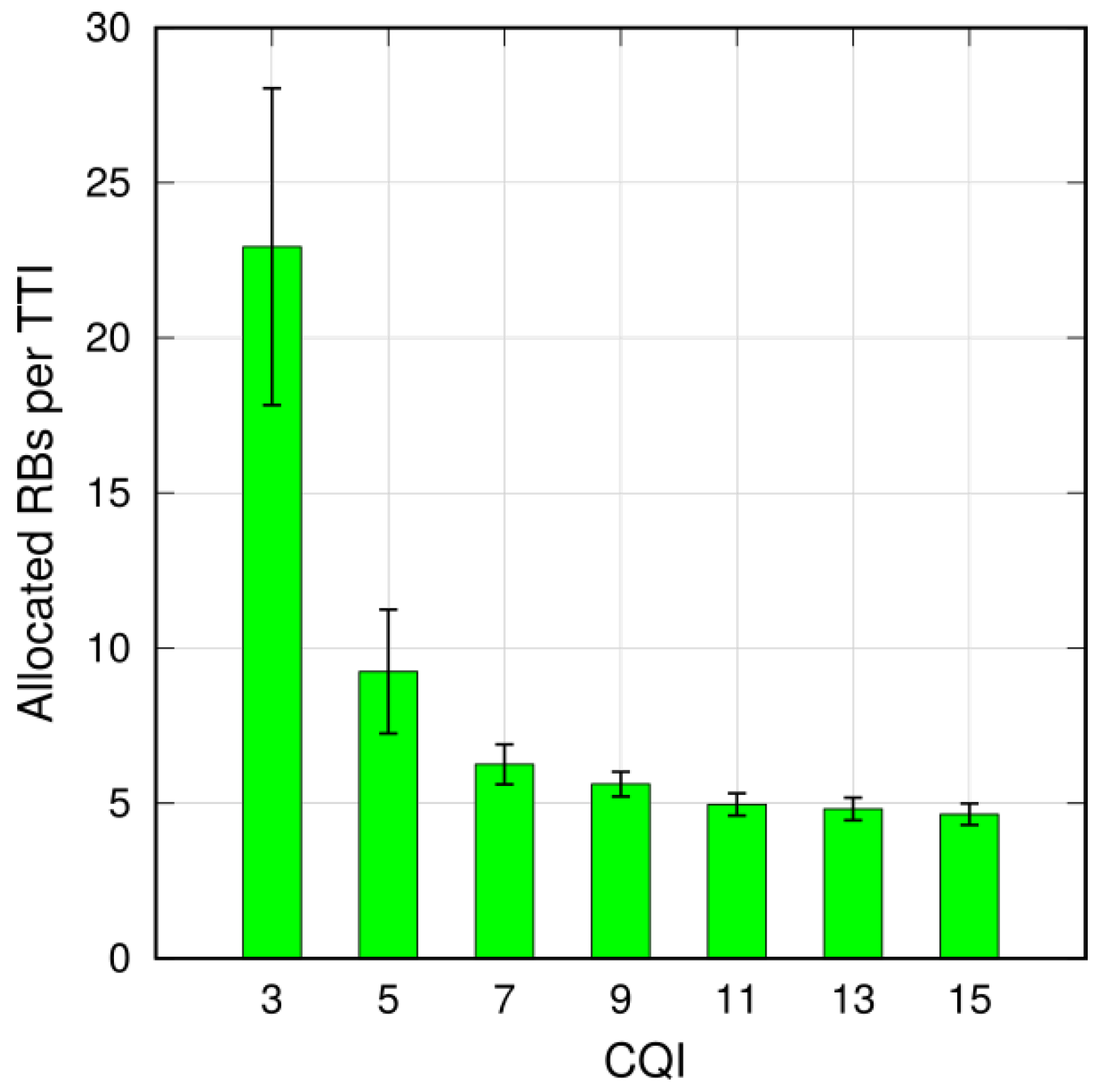
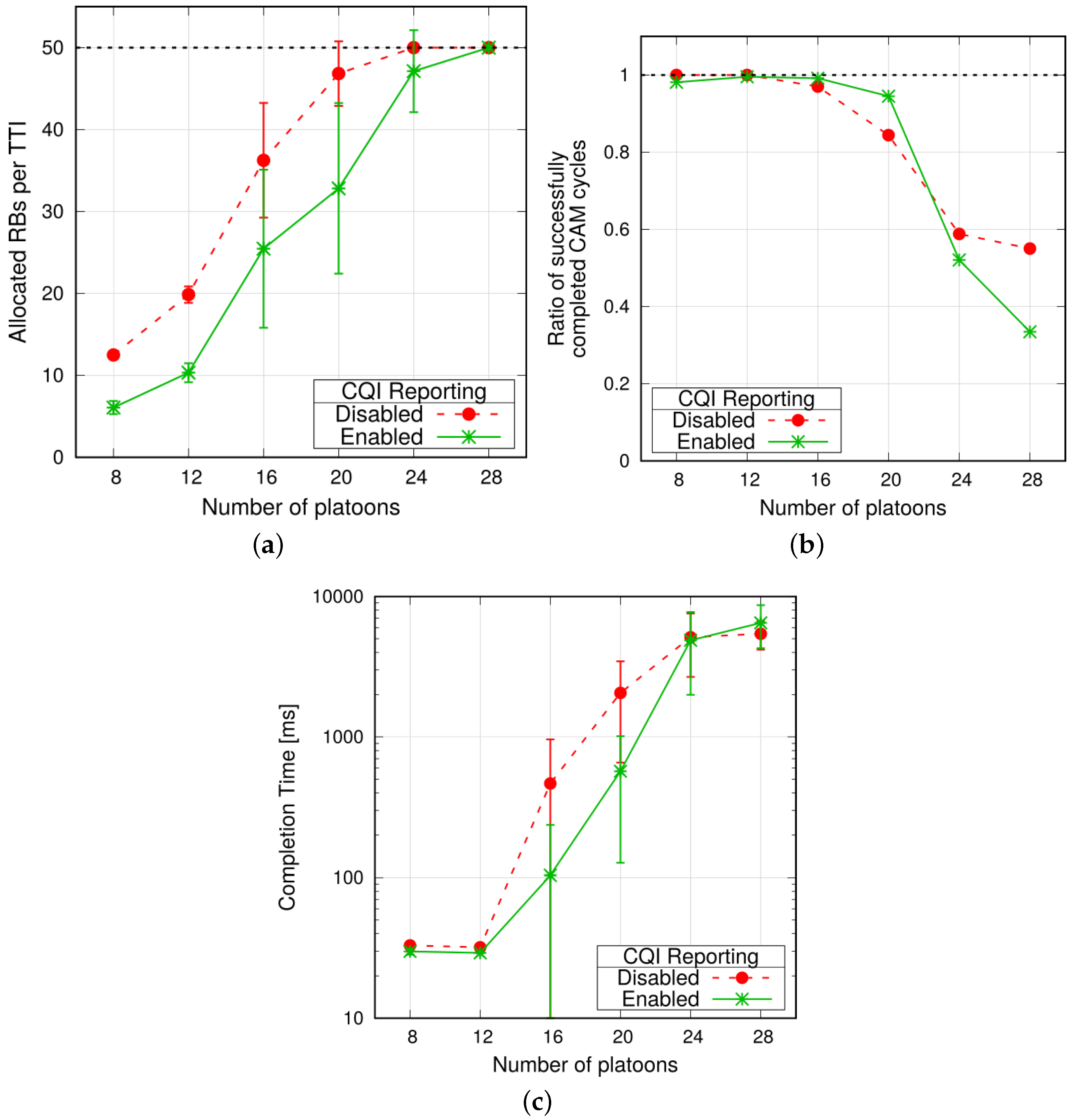
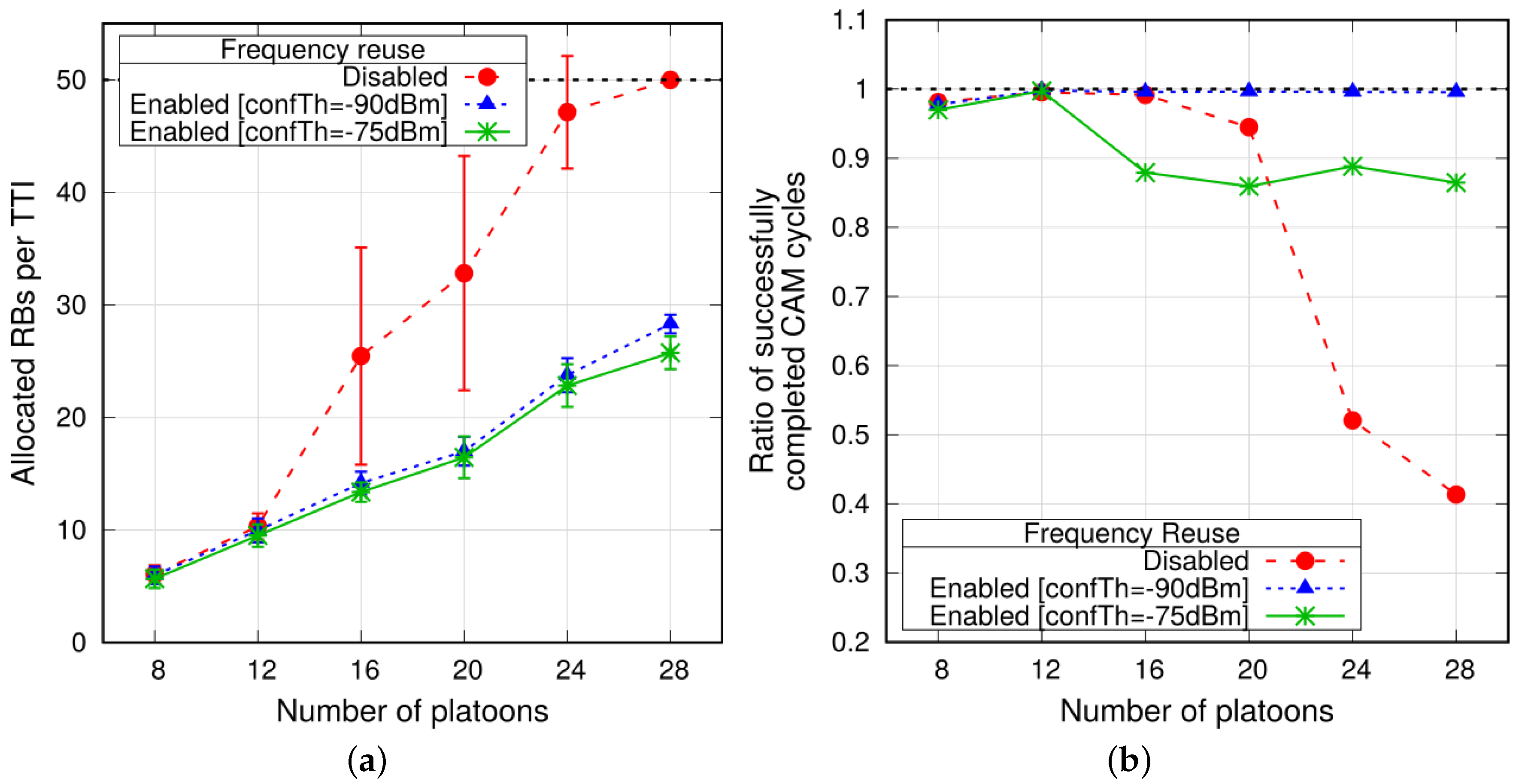
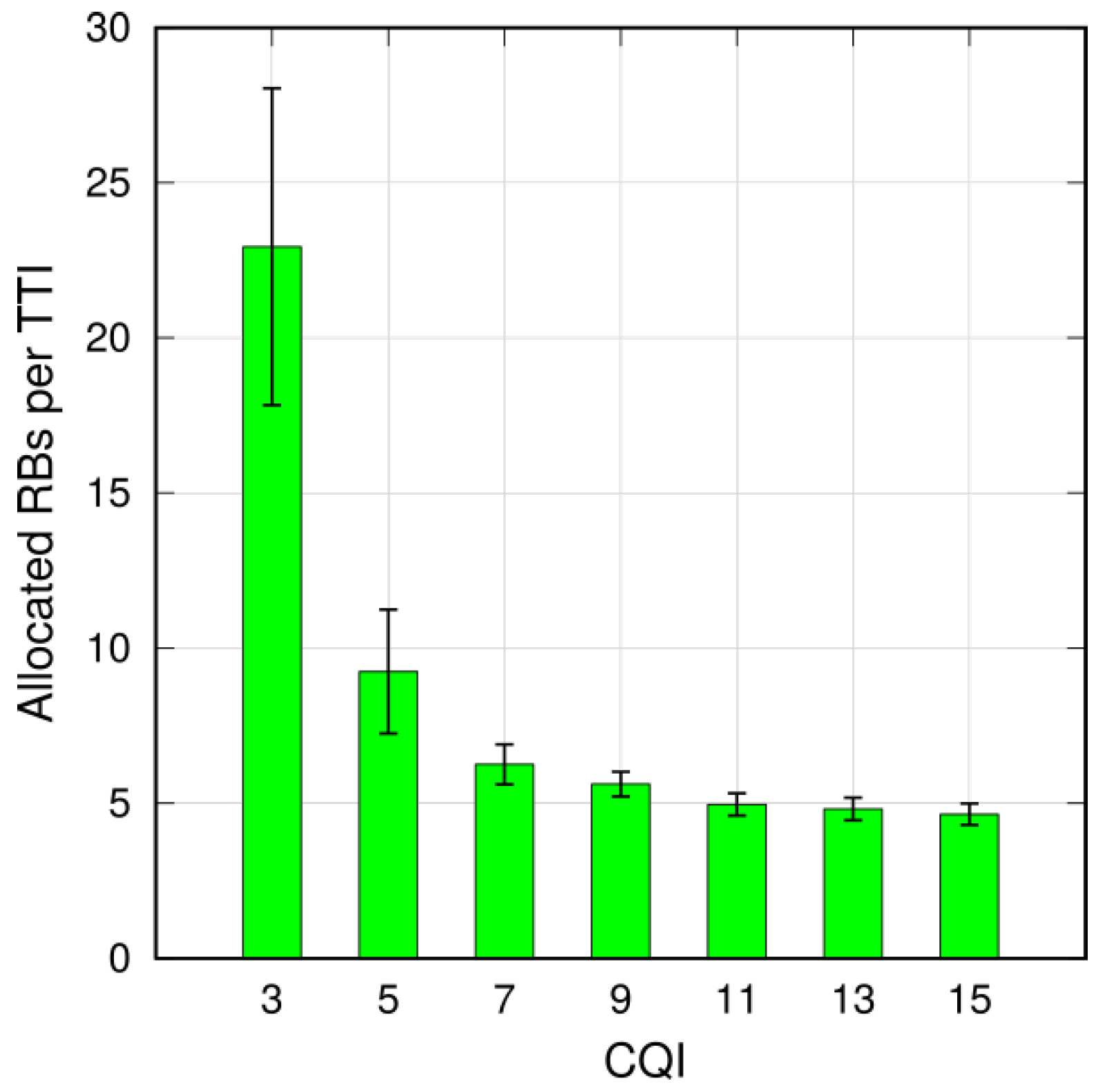
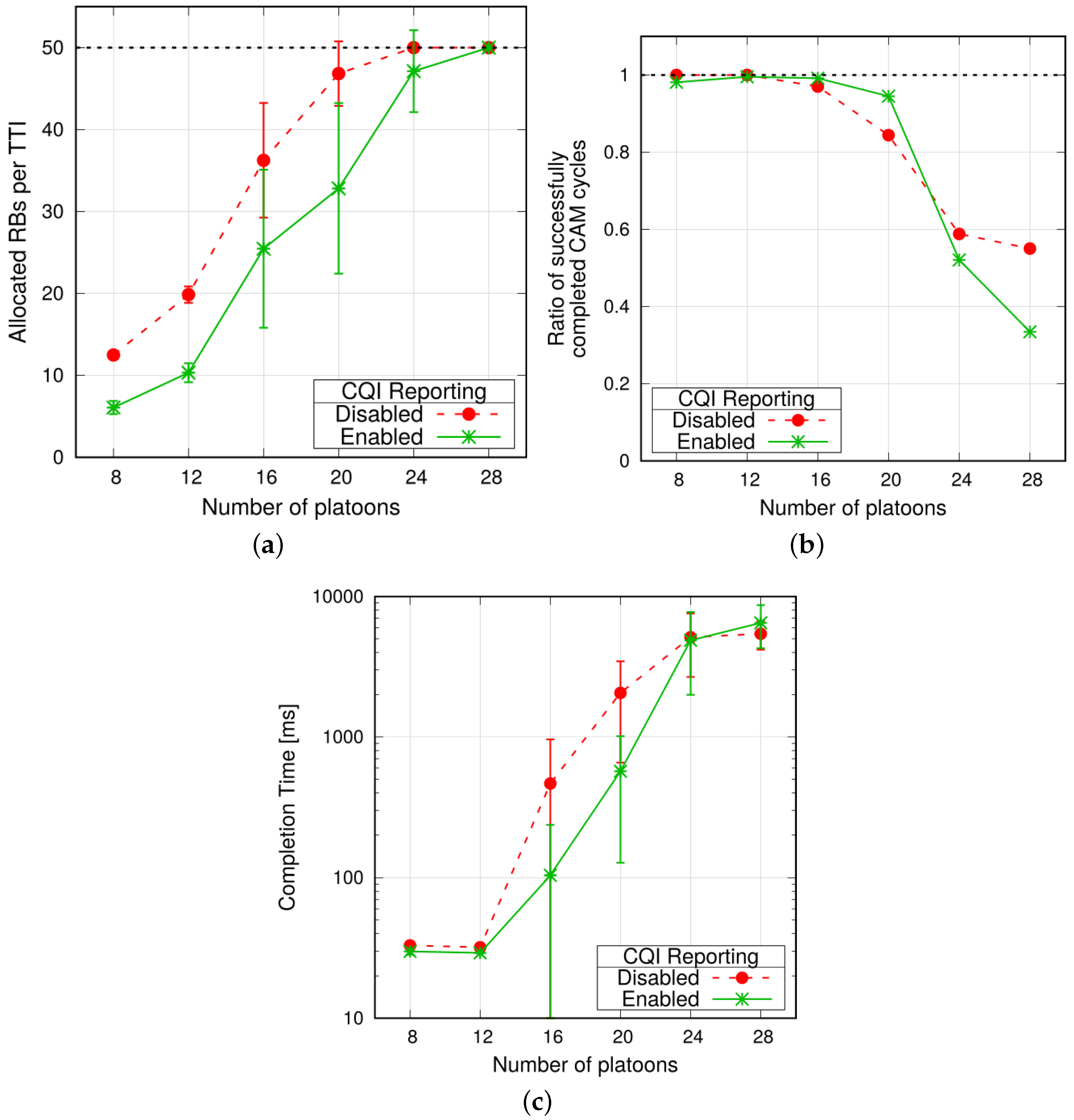
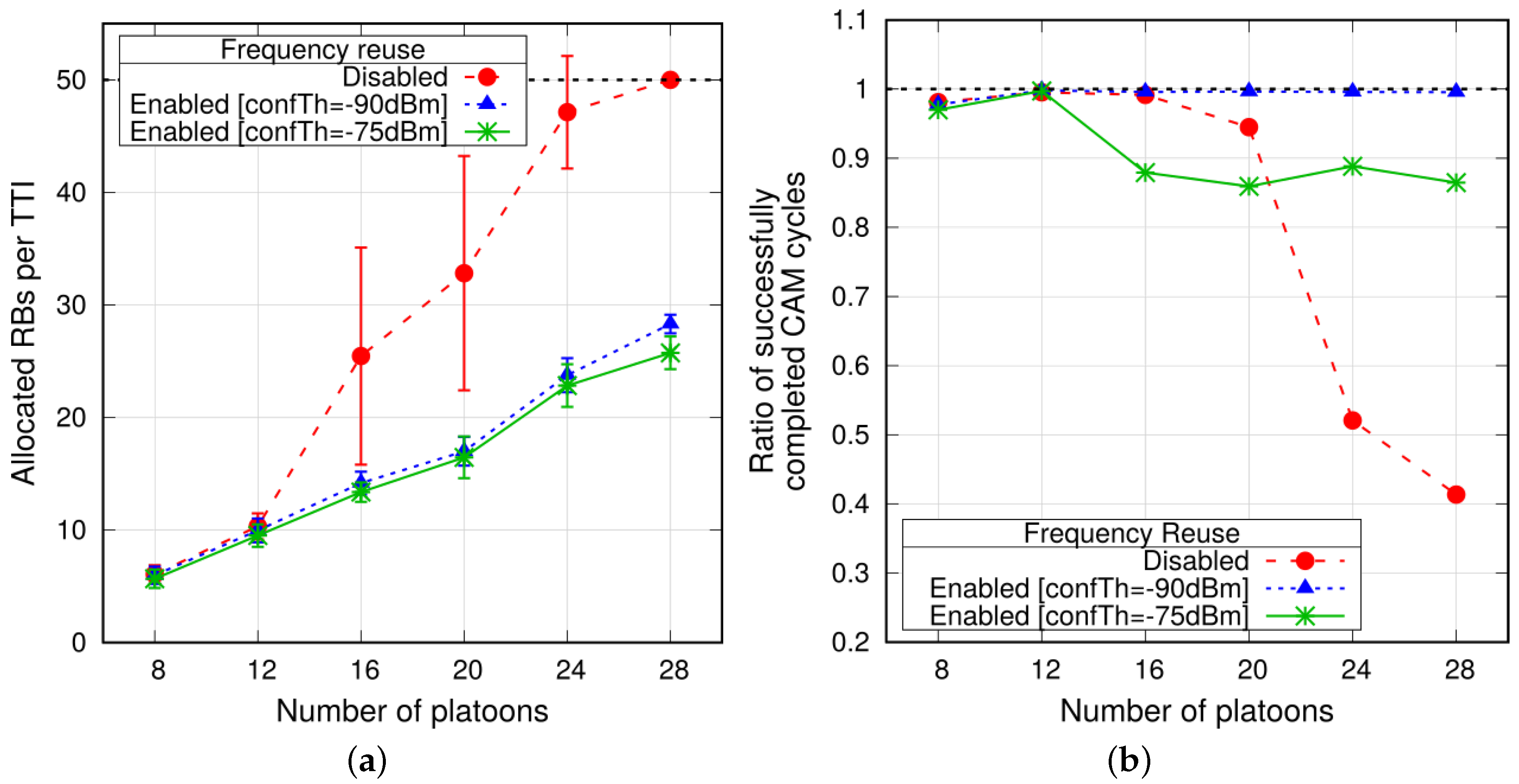
- Allocated RBs per TTI. It represents the number of RBs per TTI which are allocated to accommodate the transmission of CAMs of all platoon vehicles.
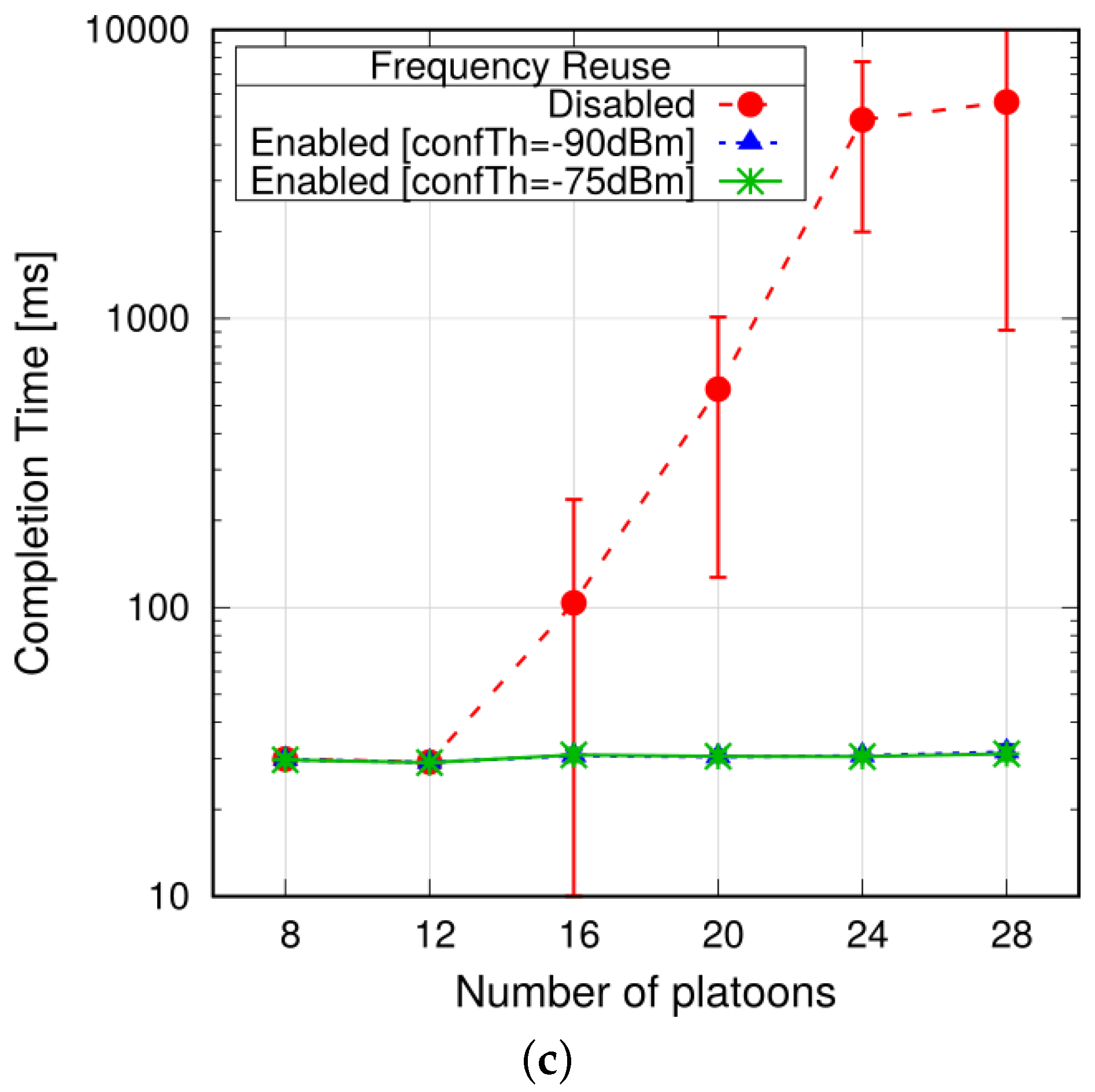
- CAM cycle completion time. It refers to the time required to accommodate all the CAM transmissions (PL to PMs and PM to PM) within a platoon at a given update cycle.
- Ratio of successfully completed CAM cycles. It is computed as the ratio between the number of CAM cycles for which all CAMs have been correctly delivered and the total number of CAM cycles.
6.4. Results
6.4.1. PL-to-PM phase
6.4.2. PM-to-PM Phase
7. Discussions
8. Conclusions
Author Contributions
Conflicts of Interest
References
- Campolo, C.; Molinaro, A.; Scopigno, R. From today’s VANETs to tomorrow’s planning and the bets for the day after. Veh. Commun. 2015, 2, 158–171. [Google Scholar] [CrossRef]
- White Paper on Automotive Vertical Sector, 5G Automotive Vision; European Commission: Brussels, Belgium, 2015.
- Vinel, A.; Lan, L.; Lyamin, N. Vehicle-to-vehicle communication in C-ACC/platooning scenarios. IEEE Commun. Mag. 2015, 53, 192–197. [Google Scholar] [CrossRef]
- Guo, G.; Yue, W. Autonomous platoon control allowing range-limited sensors. IEEE Trans. Veh. Technol. 2012, 61, 2901–2912. [Google Scholar] [CrossRef]
- IEEE Std. 802.11-2012: IEEE Standard for Information Technology—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications; IEEE: Piscataway, NJ, USA, 2012.
- Bohm, A.; Jonsson, M.; Uhlemann, E. Performance comparison of a platooning application using the IEEE 802.11p MAC on the control channel and a centralized MAC on a service channel. In Proceedings of the 2013 IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Lyon, France, 7–9 October 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 545–552. [Google Scholar]
- Fernandes, P.; Nunes, U. Platooning with IVC-enabled autonomous vehicles: Strategies to mitigate communication delays, improve safety and traffic flow. IEEE Trans. Intell. Transp. Syst. 2012, 13, 91–106. [Google Scholar] [CrossRef]
- Segata, M.; Bloessl, B.; Joerer, S.; Sommer, C.; Gerla, M.; Cigno, R.L.; Dressler, F. Toward communication strategies for platooning: simulative and experimental evaluation. IEEE Trans. Veh. Technol. 2015, 64, 5411–5423. [Google Scholar] [CrossRef]
- 3GPP TS 23.303, v 12.8.0, Technical Specification Group Services and System Aspects, Proximity-Based Services (ProSe), Stage 2, Release 12, 2016. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=840 (accessed on 11 May 2018).
- Cheng, X.; Yang, L.; Shen, X. D2D for intelligent transportation systems: A feasibility study. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1784–1793. [Google Scholar] [CrossRef]
- Sun, W.; Yuan, D.; Ström, E.G.; Brännström, F. Cluster-based radio resource management for D2D-supported safety-critical V2X communications. IEEE Trans. Wirel. Commun. 2016, 15, 2756–2769. [Google Scholar] [CrossRef]
- Sun, W.; Ström, E.G.; Brännström, F.; Sou, K.C.; Sui, Y. Radio resource management for D2D-based V2V communication. IEEE Trans. Veh. Technol. 2016, 65, 6636–6650. [Google Scholar] [CrossRef]
- Hisham, A.; Sun, W.; Ström, E.G.; Brännström, F. Power control for broadcast V2V communications with adjacent carrier interference effects. In Proceedings of the 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 22–27 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Botsov, M.; Staliczak, S.; Fertl, P. On the overhead of radio resource management schemes for mobile underlay D2D communication. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–8. [Google Scholar]
- Liang, L.; Li, G.Y.; Xu, W. Resource allocation for D2D-enabled vehicular communications. IEEE Trans. Commun. 2017, 65, 3186–3197. [Google Scholar] [CrossRef]
- Silva, C.M.; Masini, B.M.; Ferrari, G.; Thibault, I. A survey on infrastructure-based vehicular networks. Mob. Inf. Syst. 2017, 2017. [Google Scholar] [CrossRef]
- 3GPP TS 36.213, v 14.2.0, Technical Specification Group Radio Access Network (RAN), Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Layer Procedures, Release 14, 2016. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2427 (accessed on 11 May 2018).
- 3GPP TS 36.300, v 14.4.0, Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA and Evolved Terrestrial Radio Access Network (E-UTRAN, Overall description), Release 14, 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2430 (accessed on 11 May 2018).
- EN 102 637-2 v1.3.1, ITS, Vehicular Communications, Basic Set of Applications, Part 2: Specification of Cooperative Awareness Basic Service, 2014. Available online: http://www.etsi.org/deliver/etsi_en/302600_302699/30263702/01.03.01_30/en_30263702v010301v.pdf (accessed on 11 May 2018).
- Nguyen, T.V.; Shailesh, P.; Sudhir, B.; Kapil, G.; Jiang, L.; Wu, Z.; Malladi, D.; Li, J. A comparison of cellular vehicle-to-everything and dedicated short range communication. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Torino, Italy, 27–29 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 101–108. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- 3GPP TR 22.186 V15.2.0, Technical Specification Group Services and System Aspects. Enhancement of 3GPP Support for V2X Scenarios, Release 15, 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=3180 (accessed on 11 May 2018).
- Peng, H.; Li, D.; Ye, Q.; Abboud, K.; Zhao, H.; Zhuang, W.; Shen, X.S. Resource allocation for D2D-enabled inter-vehicle communications in multiplatoons. In Proceedings of the 2017 IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Campolo, C.; Molinaro, A.; Araniti, G.; Berthet, A.O. Better Platooning Control Toward Autonomous Driving: An LTE Device-to-Device Communications Strategy That Meets Ultralow Latency Requirements. IEEE Veh. Technol. Mag. 2017, 12, 30–38. [Google Scholar] [CrossRef]
- 3GPP TS 36.331, v 14.4.0, Technical Specification Group Radio Access Network; Evolved Universal Terrestrial Radio Access (E-UTRA, Radio Resource Control (RRC), Protocol specification.), Release 14, 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=2440 (accessed on 11 May 2018).
- Virdis, A.; Stea, G.; Nardini, G. Simulating LTE/LTE-Advanced Networks with SimuLTE. In Simulation and Modeling Methodologies, Technologies and Applications; Obaidat, M.S., Ören, T., Kacprzyk, J., Filipe, J., Eds.; Springer: Berlin, Germany, 2016; pp. 83–105. [Google Scholar]
- Varga, A.; Hornig, R. An overview of the OMNeT++ simulation environment. In Proceedings of the 1st International Conference on Simulation Tools and Techniques for Communications, Networks and Systems & Workshops, Marseille, France, 3–7 March 2008; ICST (Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering): Brussels, Belgium, 2008; p. 60. [Google Scholar]
- Jia, D.; Lu, K.; Wang, J.; Zhang, X.; Shen, X. A survey on platoon-based vehicular cyber-physical systems. IEEE Commun. Surv. Tutor. 2016, 18, 263–284. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Springer Science & Business Media: New York, NY, USA, 2011. [Google Scholar]
- Bazzi, A.; Masini, B.M.; Zanella, A. Performance analysis of V2V beaconing using LTE in direct mode with full duplex radios. IEEE Wirel. Commun. Lett. 2015, 4, 685–688. [Google Scholar] [CrossRef]
- Nardini, G.; Stea, G.; Virdis, A.; Sabella, D.; Caretti, M. Resource allocation for network-controlled device-to-device communications in LTE-Advanced. Wirel. Netw. 2017, 23, 787–804. [Google Scholar] [CrossRef]
- Amoozadeh, M.; Deng, H.; Chuah, C.N.; Zhang, H.M.; Ghosal, D. Platoon management with cooperative adaptive cruise control enabled by VANET. Veh. Commun. 2015, 2, 110–123. [Google Scholar] [CrossRef]
- Nardini, G.; Stea, G.; Virdis, A. A Fast and Reliable Broadcast Service for LTE-Advanced Exploiting Multihop Device-to-Device Transmissions. Future Int. 2017, 9, 89. [Google Scholar] [CrossRef]
- Nardini, G.; Stea, G.; Virdis, A. A scalable data-plane architecture for one-to-one device-to-device communications in LTE-Advanced. Comput. Netw. 2018, 131, 77–95. [Google Scholar] [CrossRef]
- Karedal, J.; Czink, N.; Paier, A.; Tufvesson, F.; Molisch, A.F. Path loss modeling for vehicle-to-vehicle communications. IEEE Trans. Veh. Technol. 2011, 60, 323–328. [Google Scholar] [CrossRef]
- Ganesan, K.; Soni, T.; Nunna, S.; Ali, A.R. Poster: A TDM approach for latency reduction of ultra-reliable low-latency data in 5G. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–2. [Google Scholar]
- Lee, K.; Kim, J.; Park, Y.; Wang, H.; Hong, D. Latency of Cellular-Based V2X: Perspectives on TTI-Proportional Latency and TTI-Independent Latency. IEEE Access 2017, 5, 15800–15809. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Layer | Parameter | Value |
|---|---|---|
| Platoon and road settings | Number of lanes | 4 |
| Road length | 2 Km | |
| Number of platoons (N) | varying | |
| Platoon size (L) | random | |
| Intra-platoon gap (d) | 10 m | |
| CAM size | 300 Bytes | |
| CAM update cycle (T) | 100 ms | |
| Network settings | Available bandwidth | 10 MHz (50 RBs) |
| VUEs’ tx power | 10 dBm | |
| Resource allocation mode | Mode 3 | |
| Scheduling policy | Max C/I |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nardini, G.; Virdis, A.; Campolo, C.; Molinaro, A.; Stea, G. Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors 2018, 18, 1527. https://doi.org/10.3390/s18051527
Nardini G, Virdis A, Campolo C, Molinaro A, Stea G. Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors. 2018; 18(5):1527. https://doi.org/10.3390/s18051527
Chicago/Turabian StyleNardini, Giovanni, Antonio Virdis, Claudia Campolo, Antonella Molinaro, and Giovanni Stea. 2018. "Cellular-V2X Communications for Platooning: Design and Evaluation" Sensors 18, no. 5: 1527. https://doi.org/10.3390/s18051527
APA StyleNardini, G., Virdis, A., Campolo, C., Molinaro, A., & Stea, G. (2018). Cellular-V2X Communications for Platooning: Design and Evaluation. Sensors, 18(5), 1527. https://doi.org/10.3390/s18051527