Smart Waste Collection System with Low Consumption LoRaWAN Nodes and Route Optimization

 , ,
, , 
 and
and 
Abstract
1. Introduction
2. State of the Art
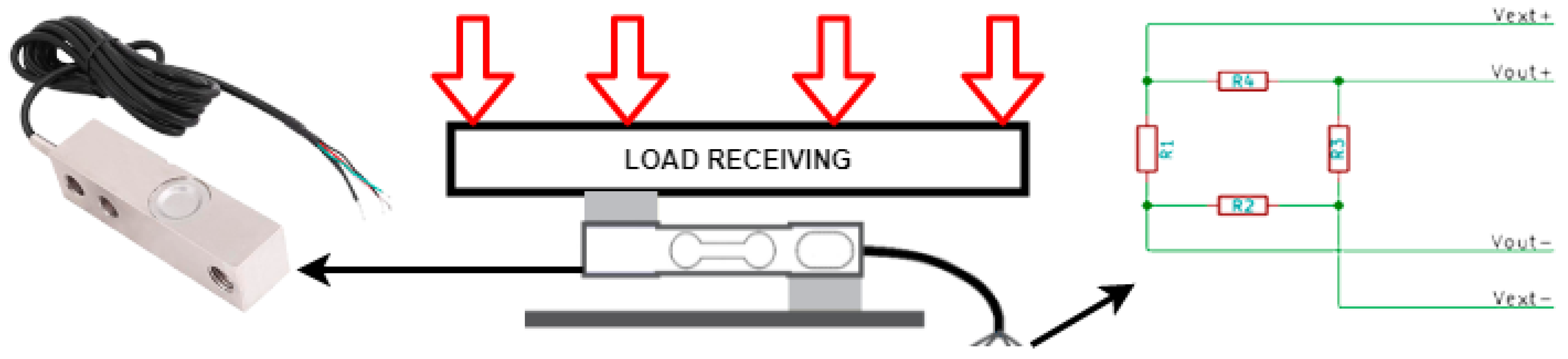
2.1. Volume and Weight Sensors
2.2. Wireless Sensors Networks
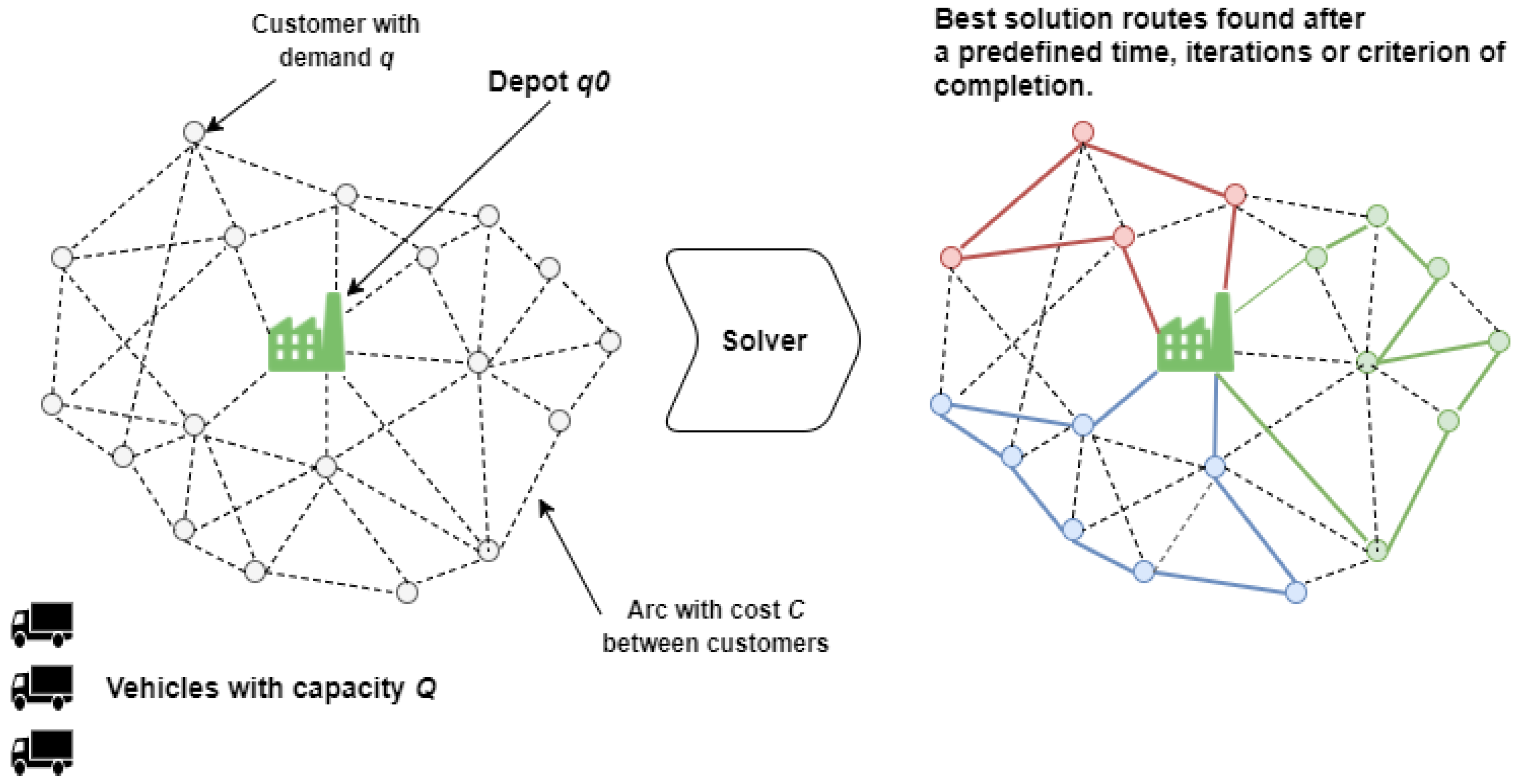
2.3. CVRP
3. System Proposed
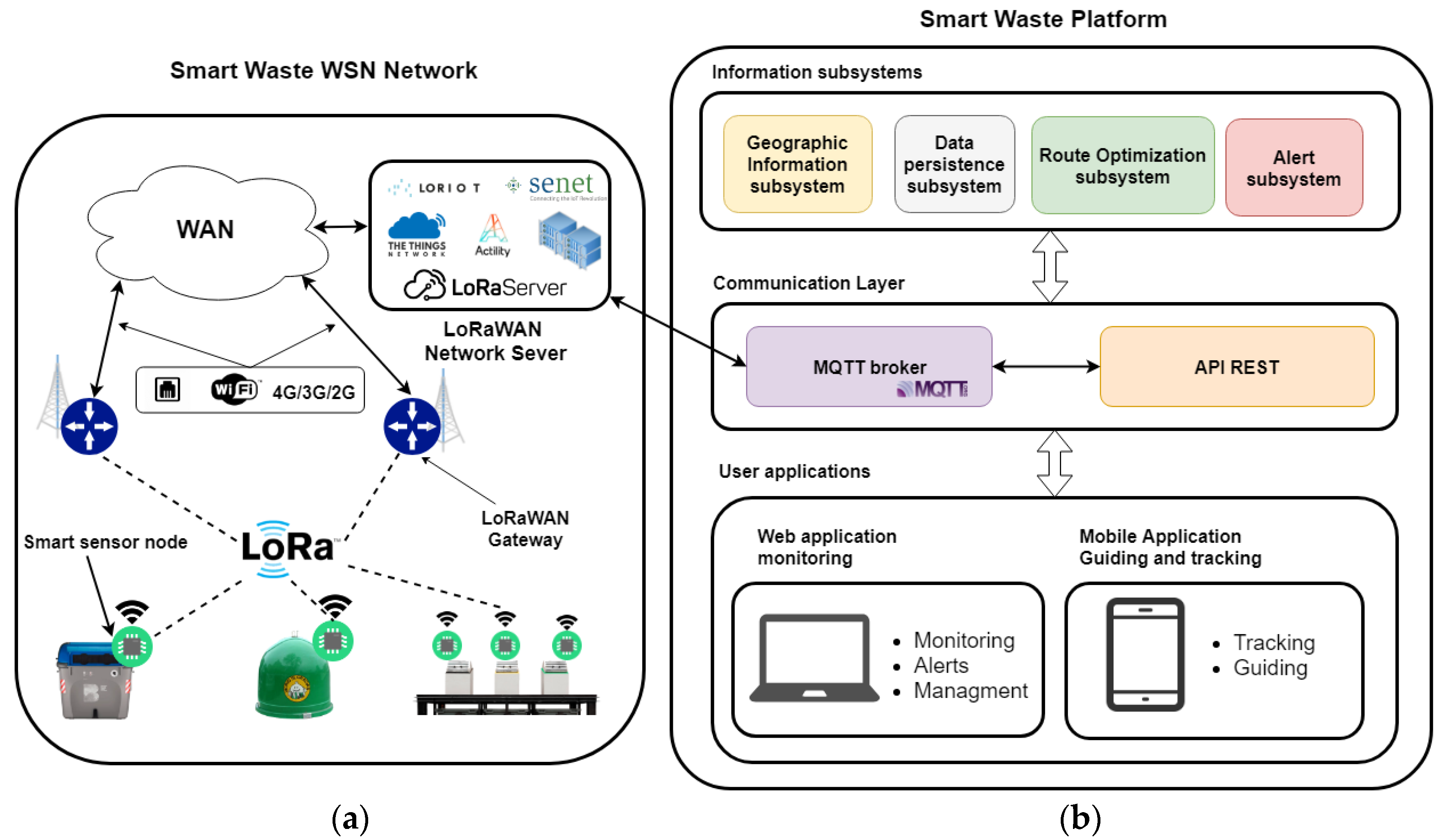
3.1. System Architecture
- Geographic Information Subsystem: this subsystem of the architecture stores geographic data regarding the region where the nodes are deployed. These geographic data are mainly related to the information about the routes between node locations in the system and their geocoding information. The services of this system are provided through a REST API (Application Programming Interface) to other subsystems.
- Data persistence subsystem: This system stores the information related to the management of the collection platform (data from the sensors and the deployed network, vehicles and the routes they perform, users, etc.).
- Alert subsystem: This system manages the incidences related to the information obtained through the container sensors and the vehicle fleet. They notify possible events that may happen in both the container and the vehicle fleet.
- Route optimization system: This system is responsible for searching the best collection routes for the vehicle fleet using the information obtained from the sensors.
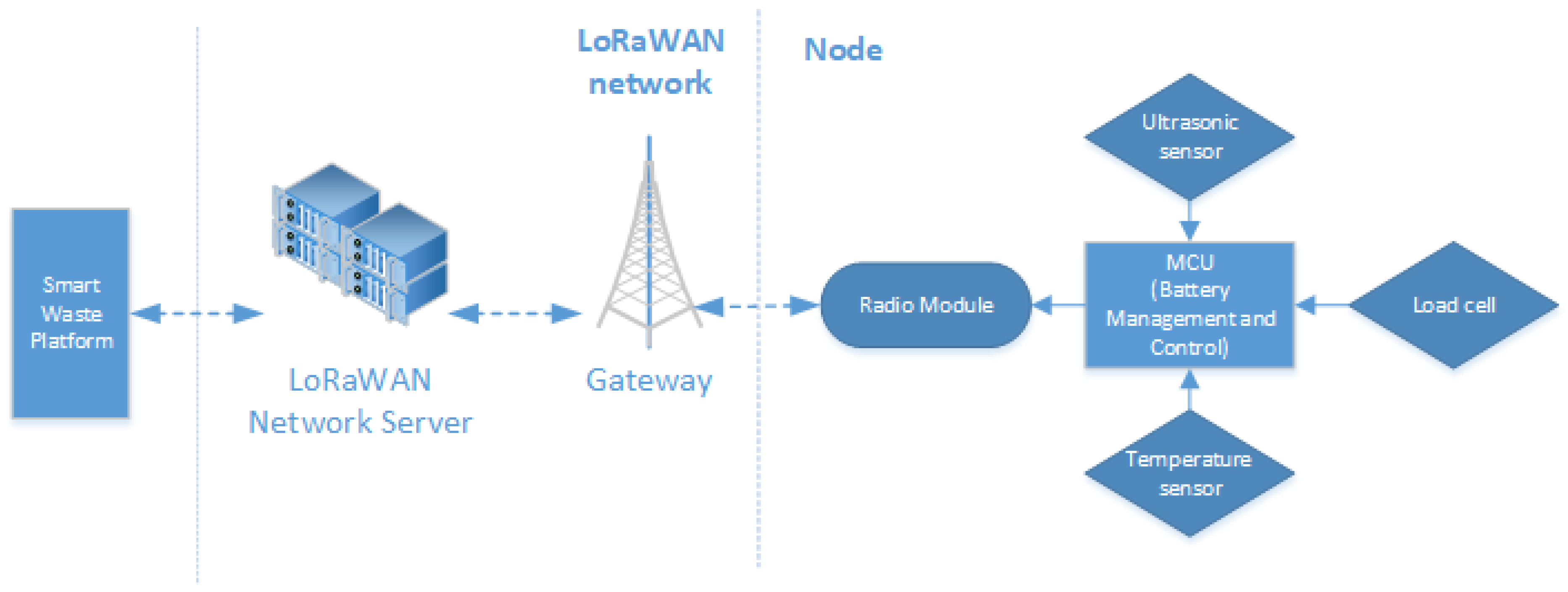
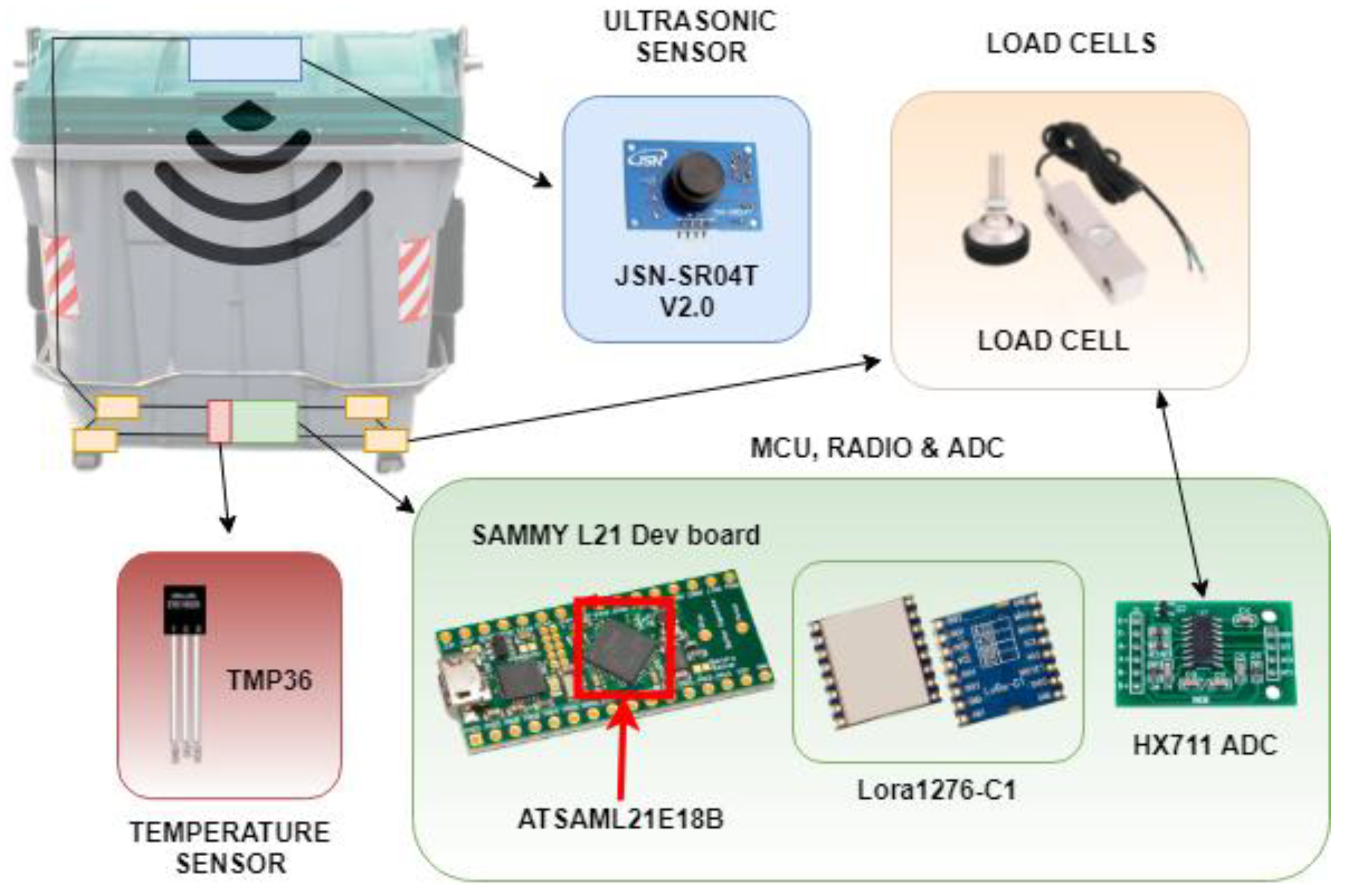
3.2. Developed Device
3.3. WSN Energy Comparison and Selection
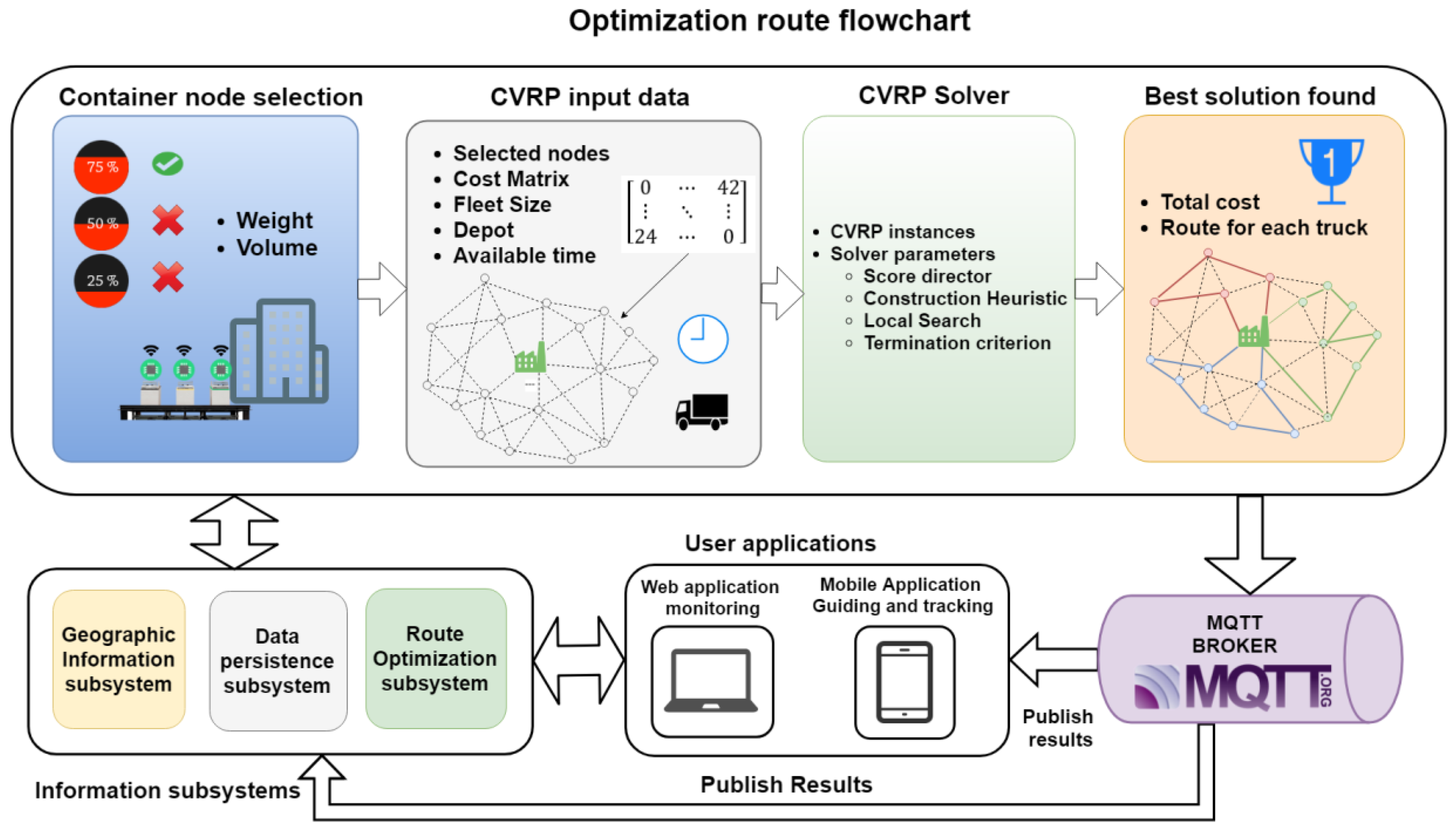
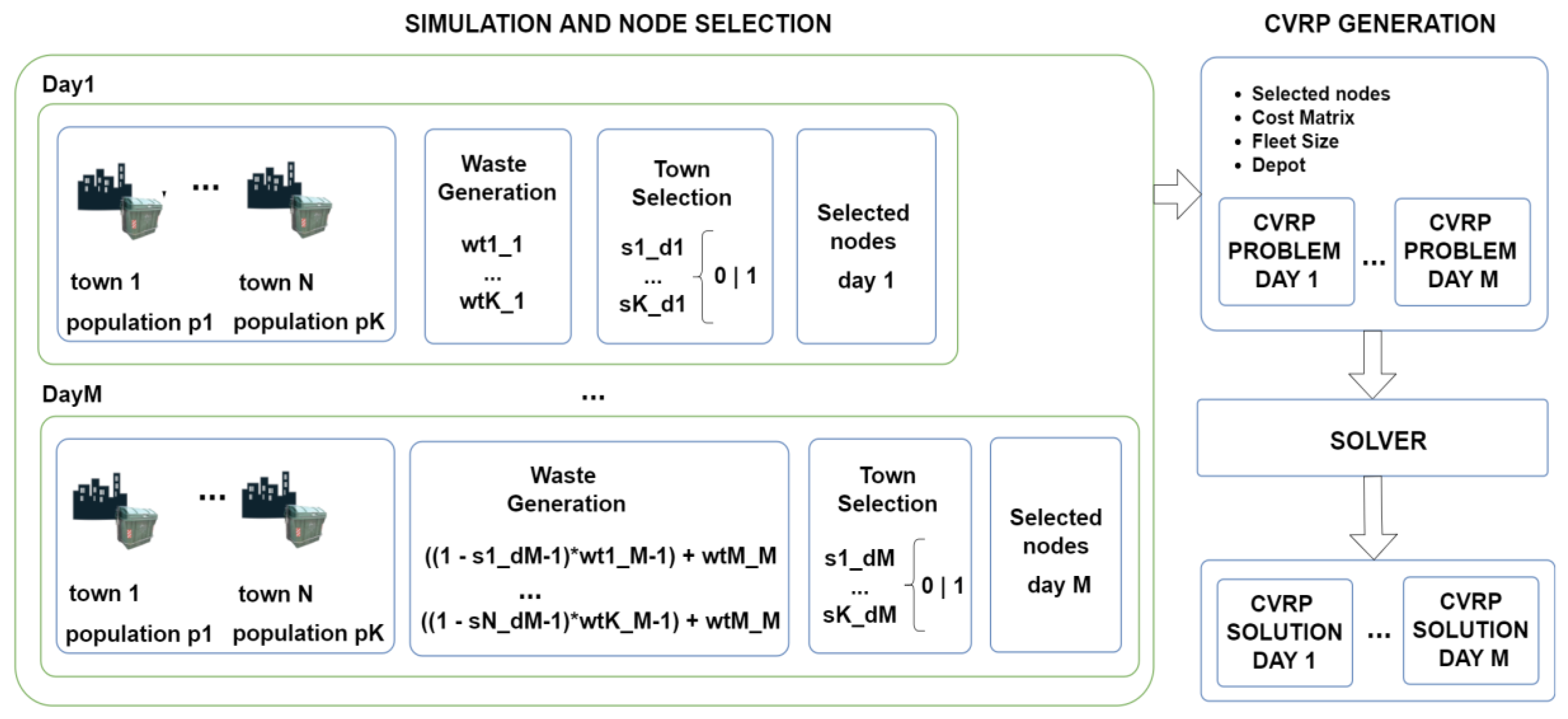
3.4. Optimization Route Engine
- (1)
- Node selection: nodes visited by the waste collection fleet are selected. The criteria selection of nodes depends on the sensor variables at that moment—the weight and volume of each container. A threshold will be established to select the nodes that must be collected. This will depend on variables, such as current regulations of the town where the system is deployed [85] as well as waste intended to be collected. This is the reason why the criteria will change depending on the specific case study. When specifying the threshold, the following factors should be considered: filling frequency, data availability in the system and whether a criterion should be established or not, in accordance with the last waste report from the town. The criteria applied in this case study will be further explained later.
- (2)
- CVRP data: once the nodes and the depot location have been obtained, the geographic information of every node is loaded from the geographical information subsystem to get the matrix of costs that will be employed for the CVRP resolution. The number of available vehicles must also be defined, as well as an ending criterion related to the time intended to be spent seeking the best solution. The system was implemented using the Graphhopper [86] framework and data from OpenStreetMap.
- (3)
- CVRP solver: this is executed with previously indicated data in the route optimization subsystem. The heuristic construction of the solution and the algorithm of the local search are applied until the stop criteria is reached. A benchmark is employed to select the fastest optimization algorithm that can be used to obtain a feasible solution during the indicated time. Different construction heuristics are used for different local searches.
- (4)
- Best solution found: once the best or most feasible solution is found (during the time specified under the stop criteria), it is published in the MQTT broker. The data persistence subsystem receives the information and stores the solution for that day’s collection plan. User applications (both mobile and web) will be notified through MQTT with the route that must be followed.
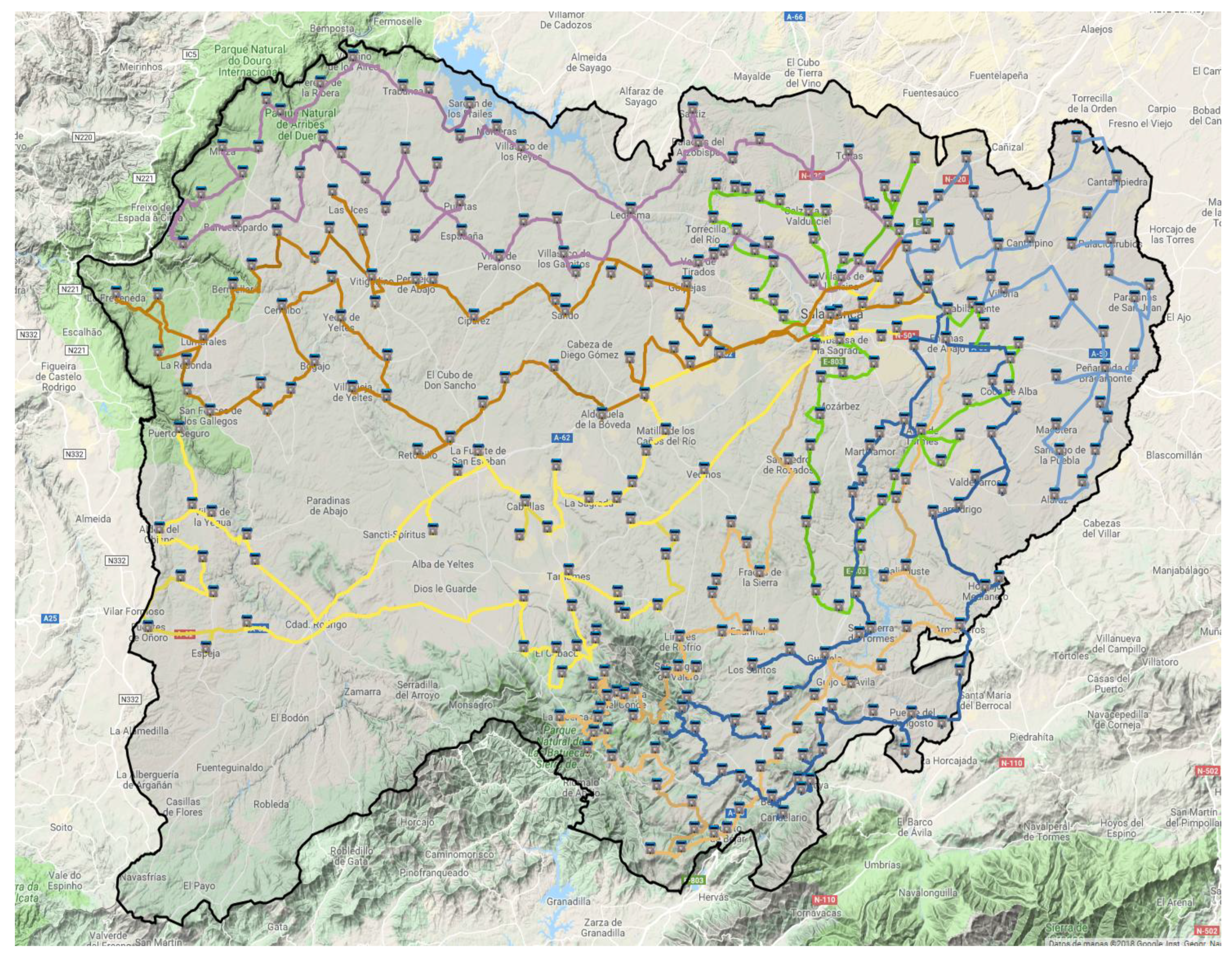
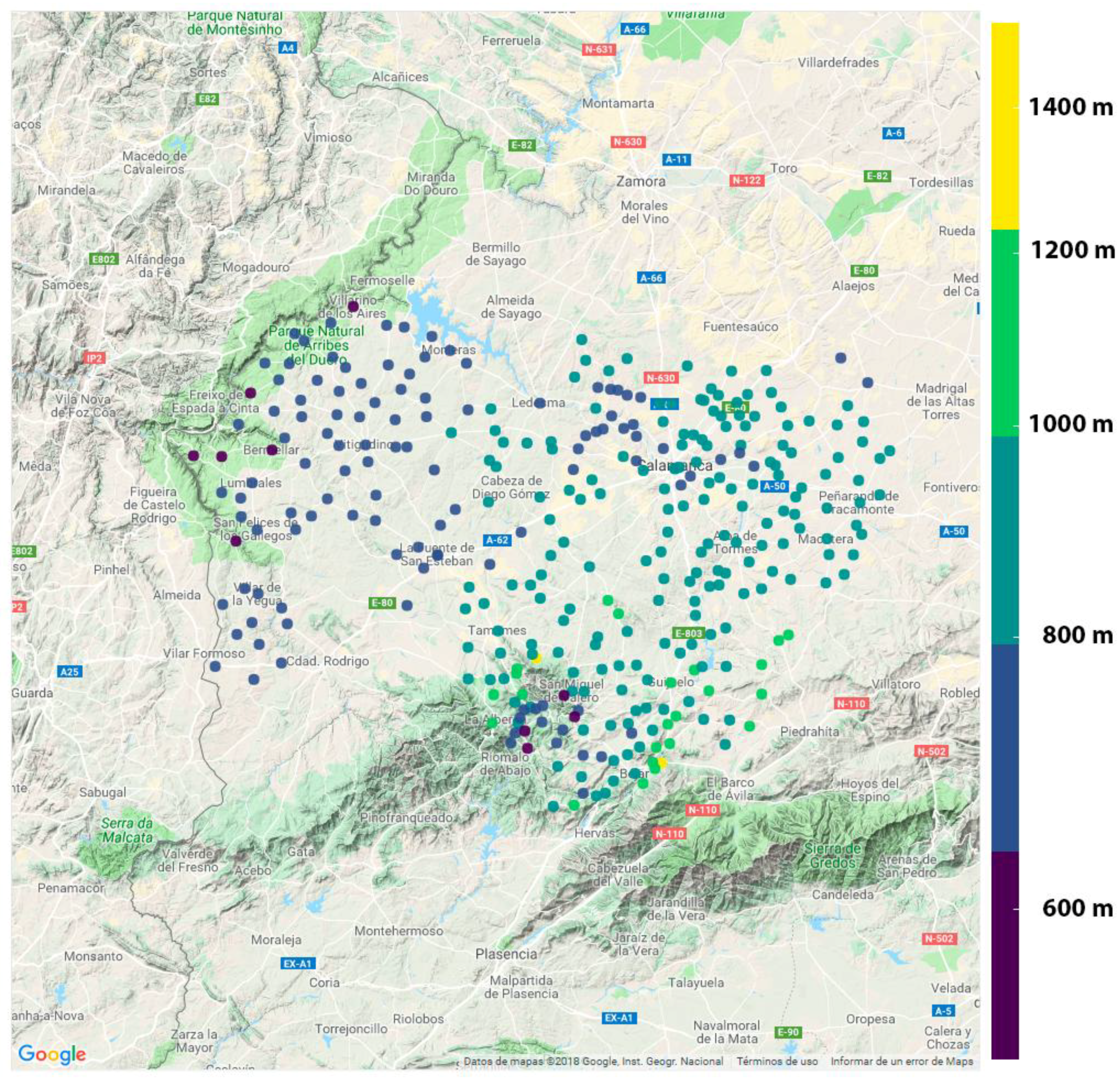
4. Case Study: Region of Salamanca
4.1. Measurements Results from Smart Sensors
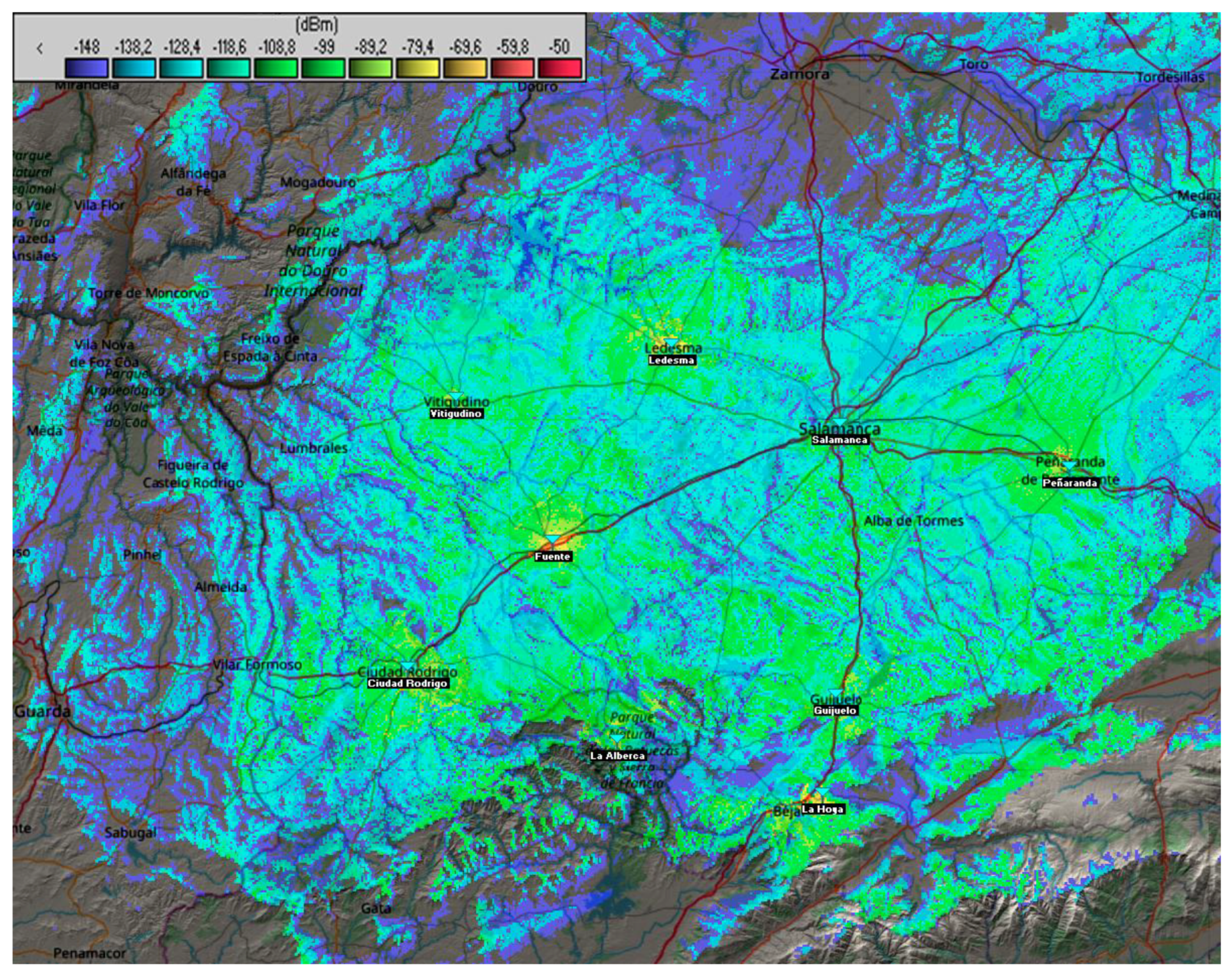
4.2. Network Coverage Study
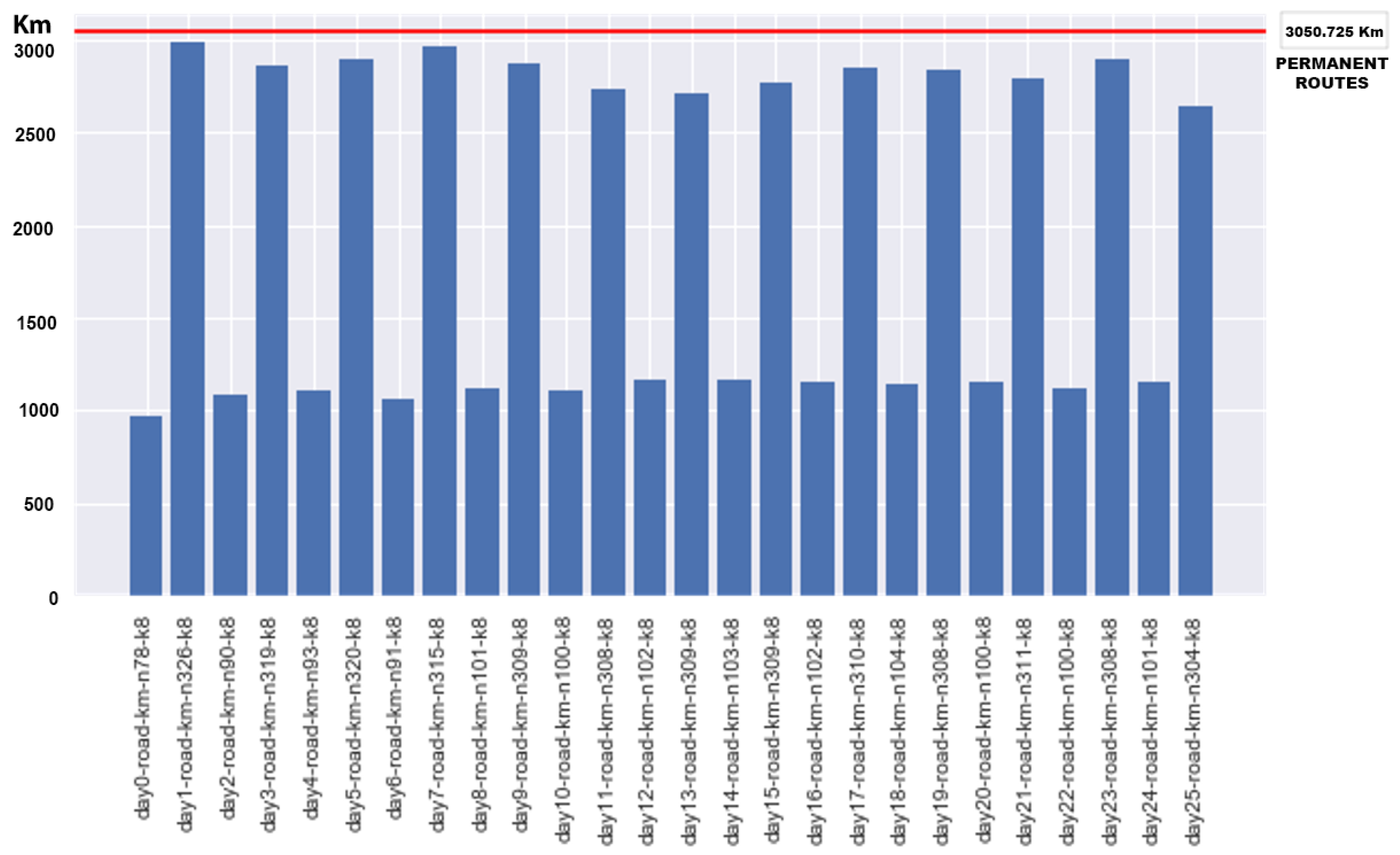
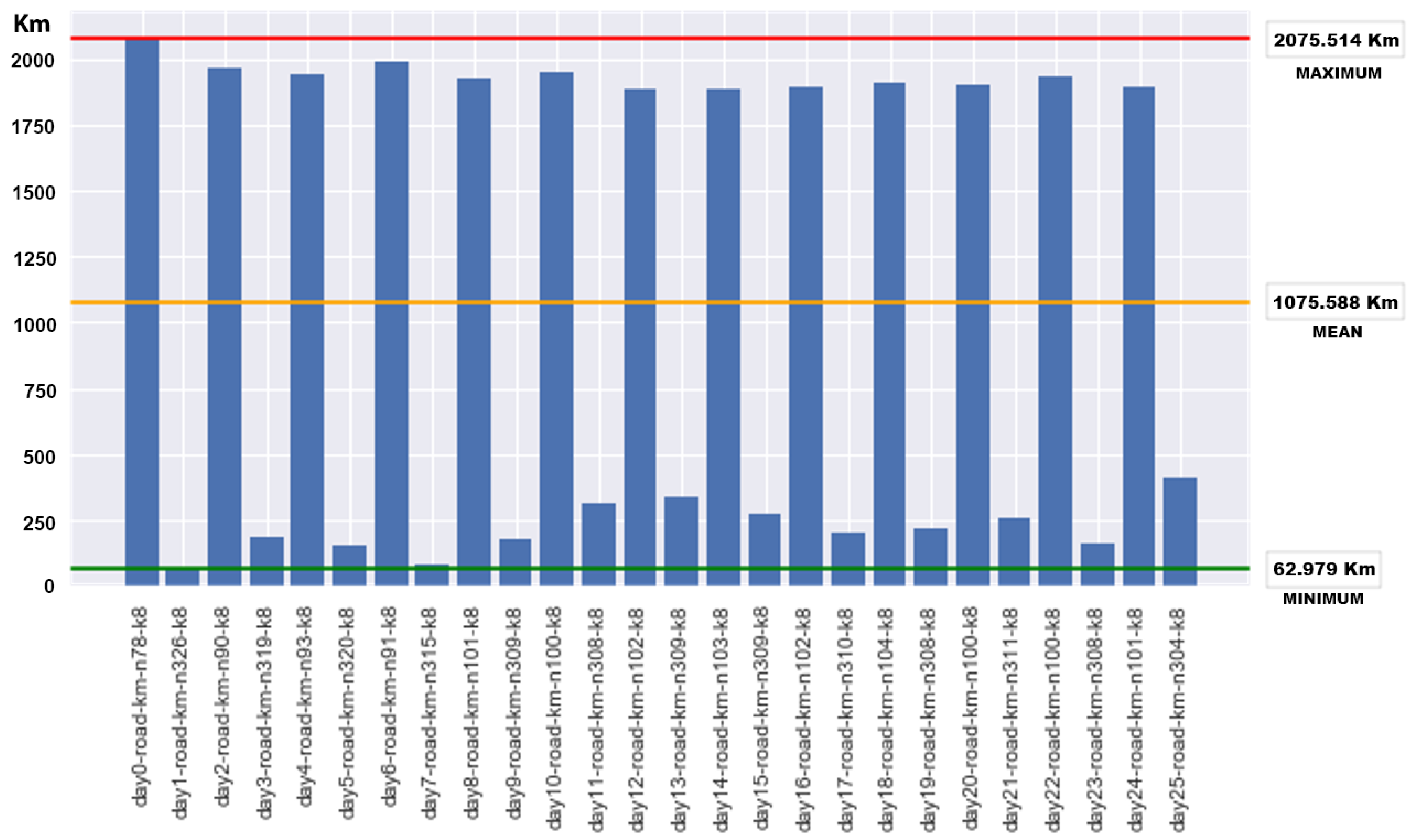
4.3. Optimization Route Results
5. Conclusions and Future Works
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Silva, B.N.; Khan, M.; Han, K. Towards sustainable smart cities: A review of trends, architectures, components, and open challenges in smart cities. Sustain. Cities Soc. 2018, 38, 697–713. [Google Scholar] [CrossRef]
- Alvarez-Campana, M.; López, G.; Vázquez, E.; Villagrá, V.A.; Berrocal, J. Smart CEI moncloa: An iot-based platform for people flow and environmental monitoring on a Smart University Campus. Sensors 2017, 17, 2856. [Google Scholar] [CrossRef] [PubMed]
- Bagula, A.; Castelli, L.; Zennaro, M. On the Design of Smart Parking Networks in the Smart Cities: An Optimal Sensor Placement Model. Sensors 2015, 15, 15443–15467. [Google Scholar] [CrossRef] [PubMed]
- Mora, H.; Gilart-Iglesias, V.; Pérez-Del Hoyo, R.; Andújar-Montoya, M.D. A Comprehensive System for Monitoring Urban Accessibility in Smart Cities. Sensors 2017, 17, 1834. [Google Scholar] [CrossRef] [PubMed]
- Vinagre, E.; De Paz, J.F.; Pinto, T.; Vale, Z.; Corchado, J.M.; Garcia, O. Intelligent energy forecasting based on the correlation between solar radiation and consumption patterns. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–7. [Google Scholar]
- De Paz, J.F.; Bajo, J.; Rodríguez, S.; Villarrubia, G.; Corchado, J.M. Intelligent system for lighting control in smart cities. Inf. Sci. 2016, 372, 241–255. [Google Scholar] [CrossRef]
- Villarrubia, G.; De Paz, J.F.; De La Iglesia, D.H.; Bajo, J. Combining multi-agent systems and wireless sensor networks for monitoring crop irrigation. Sensors 2017, 17, 1775. [Google Scholar] [CrossRef] [PubMed]
- Musat, G.A.; Colezea, M.; Pop, F.; Negru, C.; Mocanu, M.; Esposito, C.; Castiglione, A. Advanced services for efficient management of smart farms. J. Parallel Distrib. Comput. 2018, 116, 3–17. [Google Scholar] [CrossRef]
- Buratti, C.; Conti, A.; Dardari, D.; Verdone, R. An overview on wireless sensor networks technology and evolution. Sensors 2009, 9, 6869–6896. [Google Scholar] [CrossRef] [PubMed]
- Sadri, F. Ambient intelligence. ACM Comput. Surv. 2011, 43, 1–66. [Google Scholar] [CrossRef]
- Rashid, B.; Rehmani, M.H. Applications of wireless sensor networks for urban areas: A survey. J. Netw. Comput. Appl. 2016, 60, 192–219. [Google Scholar] [CrossRef]
- Longhi, S.; Marzioni, D.; Alidori, E.; Di Buo, G.; Prist, M.; Grisostomi, M.; Pirro, M. Solid Waste Management Architecture Using Wireless Sensor Network Technology. In Proceedings of the 2012 5th International Conference on New Technologies, Mobility and Security (NTMS), Istanbul, Turkey, 7–10 May 2012; pp. 1–5. [Google Scholar]
- Gutierrez, J.M.; Jensen, M.; Henius, M.; Riaz, T. Smart Waste Collection System Based on Location Intelligence. Procedia Comput. Sci. 2015, 61, 120–127. [Google Scholar] [CrossRef]
- Medvedev, A.; Fedchenkov, P.; Zaslavsky, A.; Anagnostopoulos, T.; Khoruzhnikov, S. Waste management as an IoT-enabled service in smart cities. In Proceedings of the 15th International Conference, NEW2AN 2015, and 8th Conference, ruSMART 2015, St. Petersburg, Russia, 26–28 August 2015; pp. 104–115. [Google Scholar]
- Catania, V.; Ventura, D. An approch for monitoring and smart planning of urban solid waste management using smart-M3 platform. In Proceedings of the 15th Conference of Open Innovations Association FRUCT, Saint-Petersburg, Russia, 21–25 April 2014; pp. 24–31. [Google Scholar]
- Available online: http://www.enevo.com/ (accessed on 13 April 2018).
- Hong, I.; Park, S.; Lee, B.; Lee, J.; Jeong, D.; Park, S. IoT-Based Smart Garbage System for Efficient Food Waste Management. Sci. World J. 2014, 2014, 646953. [Google Scholar] [CrossRef] [PubMed]
- Available online: http://www.sayme.es/allsensed_eng/ (accessed on 11 April 2018).
- Available online: http://bigbelly.com/platform/#ashtray___stub_out_plates (accessed on 11 April 2018).
- Kabir Ahmad, I.; Mukhlisin, M.; Basri, H. Application of Capacitance Proximity Sensor for the Identification of Paper and Plastic from Recycling Materials. Res. J. Appl. Sci. Eng. Technol. 2016, 12, 1221–1228. [Google Scholar] [CrossRef]
- Mestre, P.; Serôdio, C.; Azevedo, A.; Correia, H.; Bentes, I.; Couto, C. Filling rate assessment of recycling containers using ultrasonic transducers. Meas. J. Int. Meas. Confed. 2011, 44, 1084–1095. [Google Scholar] [CrossRef]
- Horaud, R.; Hansard, M.; Evangelidis, G.; Ménier, C. An overview of depth cameras and range scanners based on time-of-flight technologies. Mach. Vis. Appl. 2016, 27, 1005–1020. [Google Scholar] [CrossRef]
- Muller, I.; de Brito, R.M.; Pereira, C.; Brusamarello, V. Load cells in force sensing analysis—Theory and a novel application. IEEE Instrum. Meas. Mag. 2010, 13, 15–19. [Google Scholar] [CrossRef]
- Hernandez, W. Improving the response of a load cell by using optimal filtering. Sensors 2006, 6, 697–711. [Google Scholar] [CrossRef]
- Ramson, S.R.J.; Moni, D.J. Wireless sensor networks based smart bin. Comput. Electr. Eng. 2017, 64, 337–353. [Google Scholar] [CrossRef]
- Wen, Z.; Hu, S.; De Clercq, D.; Beck, M.B.; Zhang, H.; Zhang, H.; Fei, F.; Liu, J. Design, implementation, and evaluation of an Internet of Things (IoT) network system for restaurant food waste management. Waste Manag. 2017, 73, 26–38. [Google Scholar] [CrossRef] [PubMed]
- Salas, J.; Vega, H.; Ortiz, J.; Bustos, R.; Lozoya, C. Implementation analysis of GPRS communication for precision agriculture. In Proceedings of the IECON 2014-40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 3903–3908. [Google Scholar]
- Lu, S.; Duan, M.; Zhao, P.; Lang, Y.; Huang, X. GPRS-based environment monitoring system and its application in apple production. In Proceedings of the 2010 IEEE International Conference on Progress in Informatics and Computing (PIC), Shanghai, China, 10–12 December 2010; pp. 486–490. [Google Scholar]
- Trancă, D.C.; Marković, V. Energy consumption in periodical GSM/GPRS transmissions of small data chunks: An experimental study. In Proceedings of the 2015 12th International Conference on Telecommunication in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 14–17 October 2015. [Google Scholar]
- Bin Yaakop, M.; Malik, I.A.A.; Suboh, Z.; Ramli, A.F.; Abu, M.A. Bluetooth 5.0 Throughput Comparison for Internet of Thing Usability A Survey. In Proceedings of the 2017 International Conference on Engineering Technology and Technopreneurship (ICE2T), Kuala Lumpur, Malaysia, 18–20 September 2017; pp. 2–7. [Google Scholar]
- Available online: http://www.wi-fi.org/news-events/newsroom/wi-fi-alliance-introduces-low-power-long-range-wi-fi-halow (accessed on 13 April 2018).
- Where Is WiFi Headed? An Examination of 802.11ah HaLow, 802.11ad (& Others). Available online: https://www.link-labs.com/blog/future-of-wifi-802-11ah-802-11ad (accessed on 13 April 2018).
- Wang, X.; Ma, L.; Yang, H. Online water monitoring system based on ZigBee and GPRS. Procedia Eng. 2011, 15, 2680–2684. [Google Scholar] [CrossRef]
- Franceschinis, M.; Pastrone, C.; Spirito, M.A.; Borean, C. On the performance of ZigBee Pro and ZigBee IP in IEEE 802.15.4 networks. In Proceedings of the 2013 IEEE 9th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Lyon, France, 7–9 October 2013; pp. 83–88. [Google Scholar]
- Sinha, R.S.; Wei, Y.; Hwang, S.H. A survey on LPWA technology: LoRa and NB-IoT. ICT Express 2017, 3, 14–21. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2018. [Google Scholar] [CrossRef]
- Available online: https://www.sigfox.com/en%0Ahttp://www.sigfox.com/en/ (accessed on 7 March 2018).
- Walker, H.R. Ultra narrow band modulation. In Proceedings of the 2004 IEEE/Sarnoff Symposium on Advances in Wired and Wireless Communication, Princeton, NJ, USA, 26–27 April 2004. [Google Scholar]
- Available online: https://partners.sigfox.com/companies/sigfox-spain (accessed on 13 April 2018).
- Available online: https://www.iotnet.hr/ (accessed on 13 April 2018).
- Available online: https://vt-iot.com/ (accessed on 13 April 2018).
- Available online: https://www.semtech.com/technology/lora (accessed on 7 March 2018).
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar]
- Casals, L.; Mir, B.; Vidal, R.; Gomez, C. Modeling the Energy Performance of LoRaWAN. Sensors. 2017, 17, 2364. [Google Scholar] [CrossRef] [PubMed]
- Lora Alliance. Lora-Alliance Technology. Available online: https://www.lora-alliance.org/technology (accessed on 7 March 2018).
- Yang, S.-H. Internet of Things. In Wireless Sensor Networks. Signals and Communication Technology; Springer: London, UK, 2013; pp. 247–261. [Google Scholar]
- Available online: https://www.loriot.io/ (accessed on 13 April 2018).
- Available online: https://www.senetco.com/ (accessed on 13 April 2018).
- Wang, Y.P.E.; Lin, X.; Adhikary, A.; Grövlen, A.; Sui, Y.; Blankenship, Y.; Bergman, J.; Razaghi, H.S. A Primer on 3GPP Narrowband Internet of Things. IEEE Commun. Mag. 2017, 55, 117–123. [Google Scholar] [CrossRef]
- 3GPP. Available online: http://www.3gpp.org/ (accessed on 13 April 2018).
- GSMA. Narrowband—Internet of Things (NB-IoT) | Internet of Things. Available online: https://www.gsma.com/iot/narrow-band-internet-of-things-nb-iot/ (accessed on 7 March 2018).
- On-Ramp Wireless and Meterlinq Deploy IoT Network in Italy. Available online: http://www.meterlinq.com/en/blog/on-ramp-wireless-and-meterlinq-deploy-iot-network-in-italy/?lang=en (accessed on 13 April 2018).
- Available online: https://www.ingenu.com/technology/machine-network/coverage-tracker/ (accessed on 13 April 2018).
- Myers, T.J. Random Phase Multiple Access System with Meshing. U.S. Patent 7773664B2, 10 August 2010. [Google Scholar]
- Available online: http://www.weightless.org/ (accessed on 7 March 2018).
- Dantzig, G.B.; Ramser, J.H. The Truck Dispatching Problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Kumar, S.N.; Panneerselvam, R. A Survey on the Vehicle Routing Problem and Its Variants. Intell. Inf. Manag. 2012, 4, 66–74. [Google Scholar] [CrossRef]
- Tasan, A.S.; Gen, M. A genetic algorithm based approach to vehicle routing problem with simultaneous pick-up and deliveries. Comput. Ind. Eng. 2012, 62, 755–761. [Google Scholar] [CrossRef]
- Wang, S.; Tao, F.; Shi, Y.; Wen, H. Optimization of Vehicle Routing Problem with Time Windows for Cold Chain Logistics Based on Carbon Tax. Sustainability 2017, 9, 694. [Google Scholar] [CrossRef]
- Jiang, J.; Ng, K.M.; Poh, K.L.; Teo, K.M. Vehicle routing problem with a heterogeneous fleet and time windows. Expert Syst. Appl. 2014, 41, 3748–3760. [Google Scholar] [CrossRef]
- Baldacci, R.; Mingozzi, A.; Roberti, R. Recent exact algorithms for solving the vehicle routing problem under capacity and time window constraints. Eur. J. Oper. Res. 2012, 218, 1–6. [Google Scholar] [CrossRef]
- Laporte, G.; Nobert, Y. A branch and bound algorithm for the capacitated vehicle routing problem. OR Spektrum 1983, 5, 77–85. [Google Scholar] [CrossRef]
- Lysgaard, J.; Wøhlk, S. A branch-and-cut-and-price algorithm for the cumulative capacitated vehicle routing problem. Eur. J. Oper. Res. 2014, 236, 800–810. [Google Scholar] [CrossRef]
- Nagata, Y.; Bräysy, O. A powerful route minimization heuristic for the vehicle routing problem with time windows. Oper. Res. Lett. 2009, 37, 333–338. [Google Scholar] [CrossRef]
- Zhang, X.; Tang, L. A new hybrid ant colony optimization algorithm for the vehicle routing problem. Pattern Recognit. Lett. 2009, 30, 848–855. [Google Scholar] [CrossRef]
- Maher, M.; Puget, J.-F. Principles and Practice of Constraint Programming—CP98; Springer: Berlin, Germany, 1998; Volume 1520. [Google Scholar]
- Shaw, P. Using Constraint Programming and Local Search Methods to Solve Vehicle Routing Problems; Springer: London, UK, 1998; pp. 417–431. [Google Scholar]
- Alvarenga, G.B.; Mateus, G.R.; de Tomi, G. A genetic and set partitioning two-phase approach for the vehicle routing problem with time windows. Comput. Oper. Res. 2007, 34, 1561–1584. [Google Scholar] [CrossRef]
- Rochat, Y.; Taillard, É.D. Probabilistic diversification and intensification in local search for vehicle routing. J. Heuristics 1995, 1, 147–167. [Google Scholar] [CrossRef]
- Barbarosoglu, G.; Ozgur, D. A tabu search algorithm for the vehicle routing problem. Comput. Oper. Res. 1999, 26, 255–270. [Google Scholar] [CrossRef]
- 868MHz RN2483 LoRa(TM) Technology Mote. Available online: http://www.microchip.com/DevelopmentTools/ProductDetails.aspx?PartNO=dm164138&utm_source=&utm_medium=MicroSolutions&utm_term=&utm_content=DevTools&utm_campaign=RN2483+LoRa+Mote (accessed on 11 April 2018).
- Libelium Adds LoRaWAN for Full Compatibility with Smart Cities Networks. Available online: http://www.libelium.com/lorawan-waspmote-868-europe-900-915-us-433-mhz-asia-lora/ (accessed on 11 April 2018).
- Bakar, S.A.A.; Ong, N.R.; Aziz, M.H.A.; Alcain, J.B.; Haimi, W.M.W.N.; Sauli, Z. Underwater detection by using ultrasonic sensor. In Proceedings of the AIP Conference Proceedings; American Institute of Physics: College Park, MD, USA, 2017; Volume 1885, p. 20305. [Google Scholar]
- ATSAML21E18B. Available online: https://www.microchip.com/wwwproducts/en/ATSAML21E18B (accessed on 13 March 2018).
- EEMBC—ULPMark—Low Power Benchmark. Available online: https://www.eembc.org/ulpmark/index.php (accessed on 13 March 2018).
- Sammy-L21 Infosheet OEM module with Atmel/Microchip ATSAML21 processor. Available online: https://www.chip45.com/download/Sammy-L21_V1.0_Infosheet.pdf (accessed on 16 March 2018).
- SMART ARM-based Microcontrollers AT10942: SAM Configurable Custom Logic (CCL) Driver APPLICATION NOTE. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=1&cad=rja&uact=8&ved=0ahUKEwi5zYS81OvaAhXrHpoKHXkvDhkQFggsMAA&url=http%3A%2F%2Fww1.microchip.com%2Fdownloads%2Fen%2FAppNotes%2Fatmel-42448-sam-configurable-custom-logic-ccl-driver_at10942_application%2520note.pdf&usg=AOvVaw21cORTykAj-1_Vha8lX2jD (accessed on 4 May 2018).
- G-Nice RF, LoRa1276-C1. Available online: http://www.nicerf.com/Upload/ueditor/files/2017-06-21/LORA1276-C1 100mW long range Spread Spectrum modulation wireless transceiver module V1.1-ac9630bd-6925-4c75-9149-db1a18d00426.pdf (accessed on 13 March 2018).
- Vatcharatiansakul, N.; Tuwanut, P.; Pornavalai, C. Experimental performance evaluation of LoRaWAN: A case study in Bangkok. In Proceedings of the 14th International Joint Conference on Computer Science and Software Engineering (JCSSE2017), Nakhon Si Thammarat, Thailand, 12–14 July 2017. [Google Scholar]
- Yu, Y.-C.; Wang, Y.-W.; Liao, M.-S.; Jiang, J.-A.; Lee, Y.-C. A Long Range Wide Area Network-Based Smart Pest Monitoring System. In Proceedings of the ICAEE 2017: 19th International Conference on Agricultural and Ecological Engineering, London, UK, 25–26 May 2017; Volume 1111. [Google Scholar]
- Catherwood, P.A.; Mccomb, S.; Little, M.; Mclaughlin, J.A.D. Channel Characterisation for Wearable LoRaWAN Monitors. In Proceedings of the Loughborough Antennas & Propagation Conference (LAPC), Loughborough, UK, 13–14 November 2017; pp. 6–9. [Google Scholar]
- LoRa Server, open-source LoRaWAN Network-Server. Available online: https://www.loraserver.io/ (accessed on 13 April 2018).
- Available online: https://www.thethingsnetwork.org/ (accessed on 5 May 2018).
- Plan Integral de Residuos de Castilla y León. Available online: http://medioambiente.jcyl.es/web/jcyl/MedioAmbiente/es/Plantilla100/1284312829695/_/_/_ (accessed on 15 December 2017).
- GraphHopper. Available online: http://wiki.openstreetmap.org/wiki/GraphHopper (accessed on 8 February 2016).
- Salamanca, D.; Servicio De Recogida Selectva De Residuos Urbanos En Municipios De La Provincia De Salamanca. Tramitación Anticipada (Art. 110,2 Del Trlcsp). Available online: http://transparencia.lasalina.es/informacioneconomica/documentos/2016/contratos/contratos2trimestre2016.pdf (accessed on 5 May 2018).
- Available online: http://radiomobile.pe1mew.nl/?The_program:File_formats:Maplink.txt (accessed on 16 March 2018).
- Hopengarten, F. Antenna Zoning: Broadcast, Cellular & Mobile Radio, Wireless Internet- Laws , Permits & Leases, 1st ed.; Focal Press: Waltham, MA, USA, 2009. [Google Scholar]
- LoRa Coverage Planning. Available online: https://cloudrf.com/LoRa_planning (accessed on 24 April 2018).
- Available online: https://www.ecodocdb.dk/download/25c41779-cd6e/Rec7003e.pdf (accessed on 7 May 2018).
- Recomendaciones para el diseño de un Servicio de Recogida Selectiva de Monomaterial de papel y cartón en Contenedor. Available online: https://www.ecoembes.com/sites/default/files/recomendaciones_diseno_recogida_pc_en_contenedor.pdf (accessed on 5 May 2018).
- Peebles, P.Z. Probability, Random Variables, and Random Signal Principles; McGraw-Hill Education: New York, NY, USA, 1987. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Range (cm) | Accuracy (mm) | Angle of Operation (°) |
|---|---|---|---|
| Capacitive | 0–3 | 3 | 5 |
| Ultrasonic | 20–400 | 8 | 20 |
| Infrared | 10–220 | 5 | 0 |
| Radar | 30–4000 | 15 | 0 |
| Name | Minimum Coupling Loss (MCL) (dB) | Range (km) | Standby Consumption | Tx Consumption | Modulation | Availability |
|---|---|---|---|---|---|---|
| Random Phase Multiple Access (RPMA) | 160 | 100 | 0.5 μA | 85 mA | RPMA + DSSS | Spec. zones |
| Weightless P | 128 | 2 | 0.7 μA | <70 mA | GMSK + QPSK | Worldwide |
| ZigBee | 102 | 0, 20 | 3 μA | 30 mA | BPSK | Worldwide |
| LoRa | 157 | 5–15 | 0.5 μA | <90 mA | LoRa | Worldwide |
| Sigfox | 149 | 3–10 | 0.5 μA | <70 mA | BPSK | Worldwide |
| Cellulars | 118 | 2–5 | 10 mA | 800 mA | 8PSK | Worldwide |
| WiFi ah | 90 | <1 | - | <100 mA | QPSK/256QAM | N/A |
| NB-IoT | 118 | 2–5 | 5 μA | <100 mA | QPSK | Spec. zones |
| Name | Hosting | Open Source | Price Plan |
|---|---|---|---|
| LoraServer.io | Self-hosted | yes | free |
| The Thing Network (TTN) | Self-hosted/3rd party | yes | free/paid |
| Actility | 3rd party | no | free (limited)/paid |
| Loriot | 3rd party | no | free (limited)/paid |
| Senet | 3rd party | no | free (limited)/paid |
| Sensor | Consumption (mAh) |
|---|---|
| Ultrasonic sensor | 0.36 |
| Load cells | 0.06 |
| Temperature sensor | 0.002 |
| Radio module | 0.3 |
| MCUi | 0.0002 |
| MCUa | 0.068 |
| Shipments/day | Measurements/day | Estimated Consumption (mAh per day) | Measured Consumption (mAh per day) |
|---|---|---|---|
| 12 | 12 | 6.18 | 6.84 |
| 12 | 24 | 7.5 | 7.8 |
| 24 | 24 | 25.488 | 26.88 |
| 24 | 48 | 28.128 | 32.16 |
| 48 | 48 | 104.3232 | 107.04 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozano, Á.; Caridad, J.; De Paz, J.F.; Villarrubia González, G.; Bajo, J. Smart Waste Collection System with Low Consumption LoRaWAN Nodes and Route Optimization. Sensors 2018, 18, 1465. https://doi.org/10.3390/s18051465
Lozano Á, Caridad J, De Paz JF, Villarrubia González G, Bajo J. Smart Waste Collection System with Low Consumption LoRaWAN Nodes and Route Optimization. Sensors. 2018; 18(5):1465. https://doi.org/10.3390/s18051465
Chicago/Turabian StyleLozano, Álvaro, Javier Caridad, Juan Francisco De Paz, Gabriel Villarrubia González, and Javier Bajo. 2018. "Smart Waste Collection System with Low Consumption LoRaWAN Nodes and Route Optimization" Sensors 18, no. 5: 1465. https://doi.org/10.3390/s18051465
APA StyleLozano, Á., Caridad, J., De Paz, J. F., Villarrubia González, G., & Bajo, J. (2018). Smart Waste Collection System with Low Consumption LoRaWAN Nodes and Route Optimization. Sensors, 18(5), 1465. https://doi.org/10.3390/s18051465