In this section, the proposed system is detailed. It consists of the construction of a hardware device that allows controlling any type of wheelchair regardless of the manufacturer. To validate the correct functioning of the system, different control techniques have been designed and implemented. Furthermore, the first functional prototype has been integrated into a conventional electric wheelchair (Quickie S-646 model). Due to the complexity of the proposal, it has been decided to divide it into different sections.
Section 3.1 presents the design of the control hardware device and its integration with a conventional wheelchair,
Section 3.2 presents MAS architecture that supports the operation of the wheelchair control system and in
Section 3.3 the different implemented control interfaces are explained: through a mobile device (
Section 3.3.1), by means of commands from voice (
Section 3.3.2) or by an electroencephalography device (
Section 3.3.3).
3.1. Hardware Control Device
Currently, the different existing alternatives for the control of wheelchairs are based on a single model or brand. For this reason, when the different institutions carry out new studies and designs of wheelchair control mechanisms, they are forced to carry out costly processes of adapting the control mechanism [
56], resorting to the construction of prototypes that emulate wheelchairs or real situations [
57,
58], or even to make use of virtual simulators [
59,
60]. Under no circumstances (as for instance happens in the automobile sector with the CAN bus) efforts are being made to create a standard communication protocol that allows controlling all the wheelchairs on the market from different peripherals with a universal protocol.
Given this situation, the need to build a hardware device that allows to control any type of chair regardless the manufacturer has been raised. The main objective is that people with different disabilities can control by themselves any kind of wheelchair using different control interfaces in a simple manner. In this way, they will be able to perform movements that they would not be able to perform with conventional wheelchairs, gaining independence and allowing caregivers or family members to have a noticeable reduction of their workload. On the other hand, promoting the use of standards in the control of motorized wheelchairs, will make easier the work in the alternative control interfaces field of research. This will prevent the adaptation of existing wheelchairs or the construction of specific wheelchairs for the work to be developed by researchers. This will allow them to focus on the development of new technologies which aim to improve the social integration of disabled people in the field of mobility.
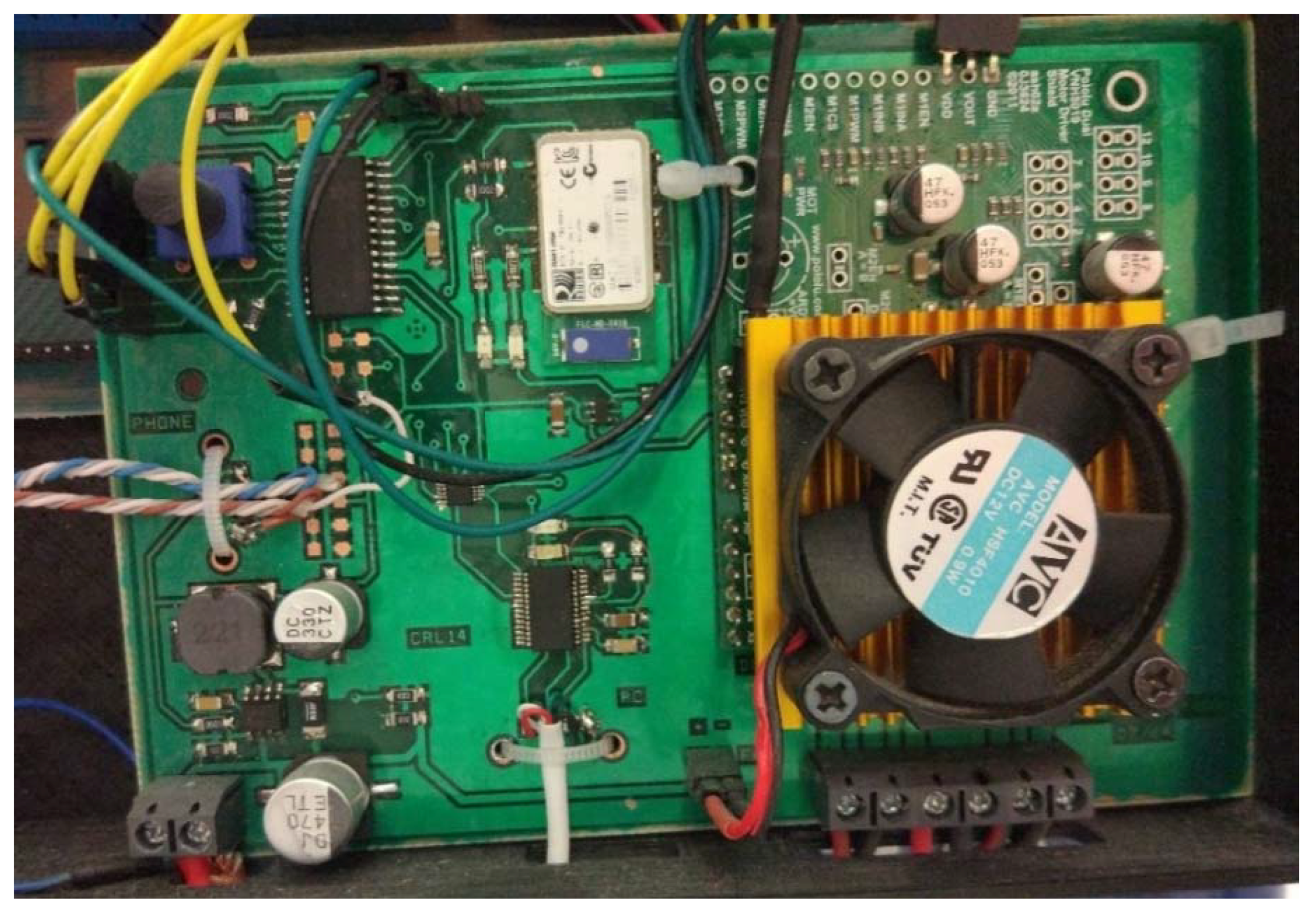
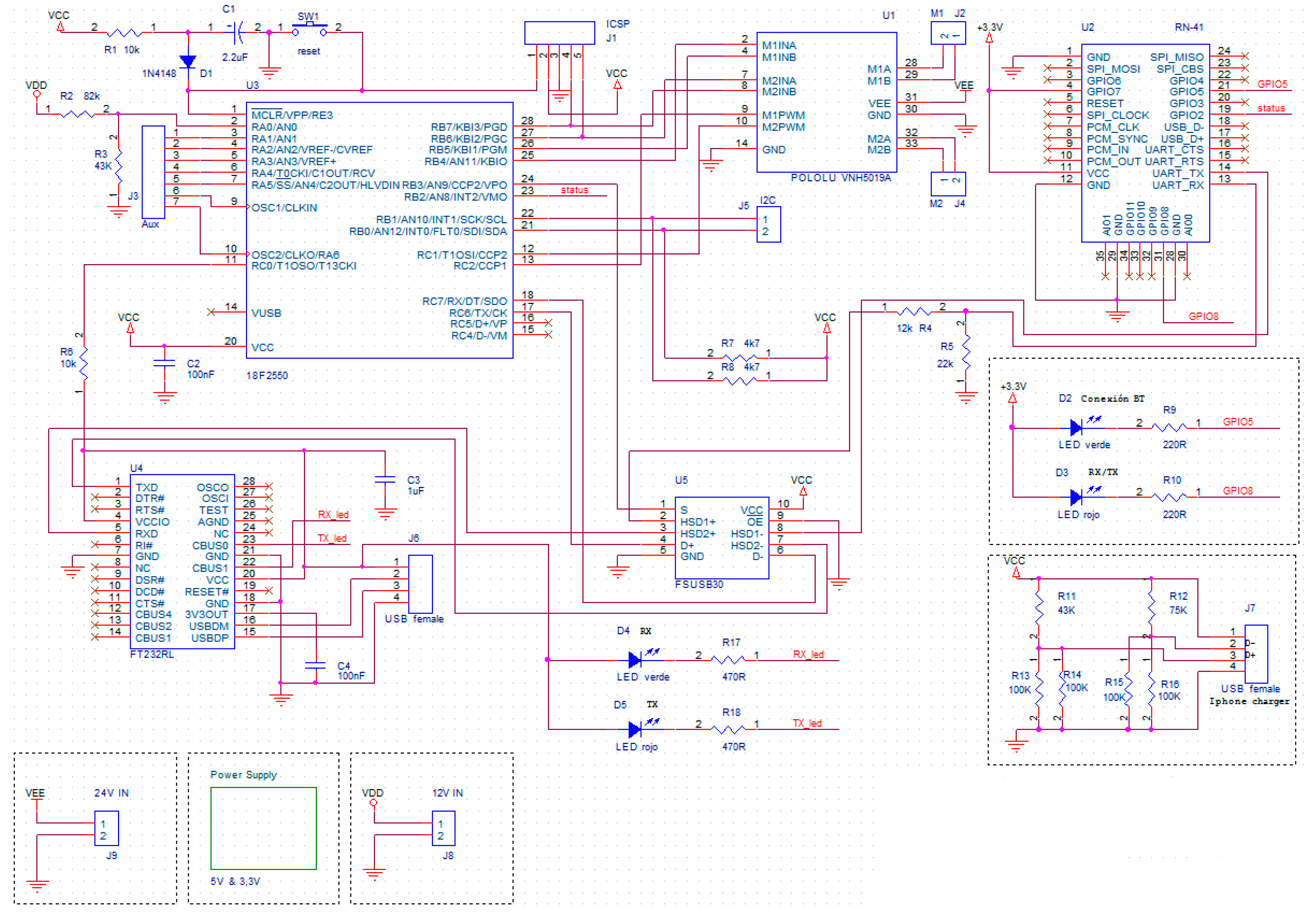
As a central part of the system, responsible for the management of the wheelchair motors control, it has been necessary to develop a printed circuit board that allows communication between control devices (
Figure 1). The main component of this board, which is in charge of the control of the system, is a Microchip PIC16F88 microcontroller. It is responsible, among other functions, for communicating the orders sent by the user through the control interfaces to the wheelchair motors. For this process, it has been necessary to incorporate drivers on the board to control the delivery of power to the motors. Pololu Dual VNH5019 drivers have been chosen for this purpose. To offer a wide alternative when choosing the control device for the wheelchair to be used, we have opted for the incorporation of two communication interfaces: a wired one, through a USB connection and a wireless one, via Bluetooth technology, which is supported by the use of a Microchip RN-41 chip. The main reason to incorporate a wireless communication method is to offer the possibility of controlling the wheelchair remotely. This functionality is specially designed to enable different control systems for situations in which the user of the wheelchair is assisted by another person, such as family members, nursing home staff, or airport personnel.
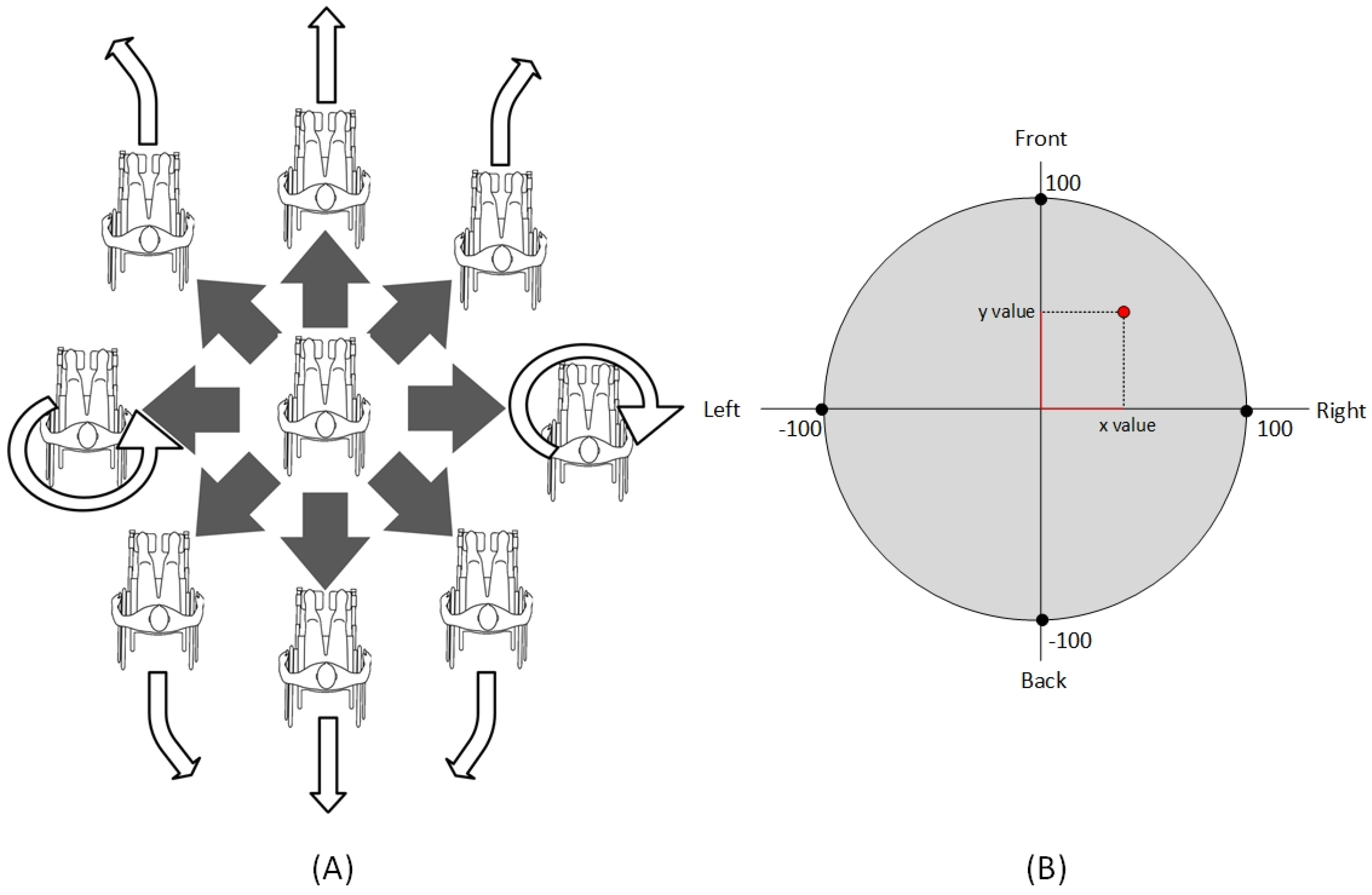
As it has been proven in the study of the current state of the art regarding wheelchair control devices, there are two types of control in the industry which are clearly differentiated and widely used: proportional controls and non-proportional controls. In order to be able to support both types of control, in the communication protocol between the developed board and the control devices, commands that allow the use of both alternatives have been incorporated. In this way, to perform a non-proportional control, a total of nine commands have been included, corresponding to the movements of: front, back, left, right, four diagonal movements and stop.
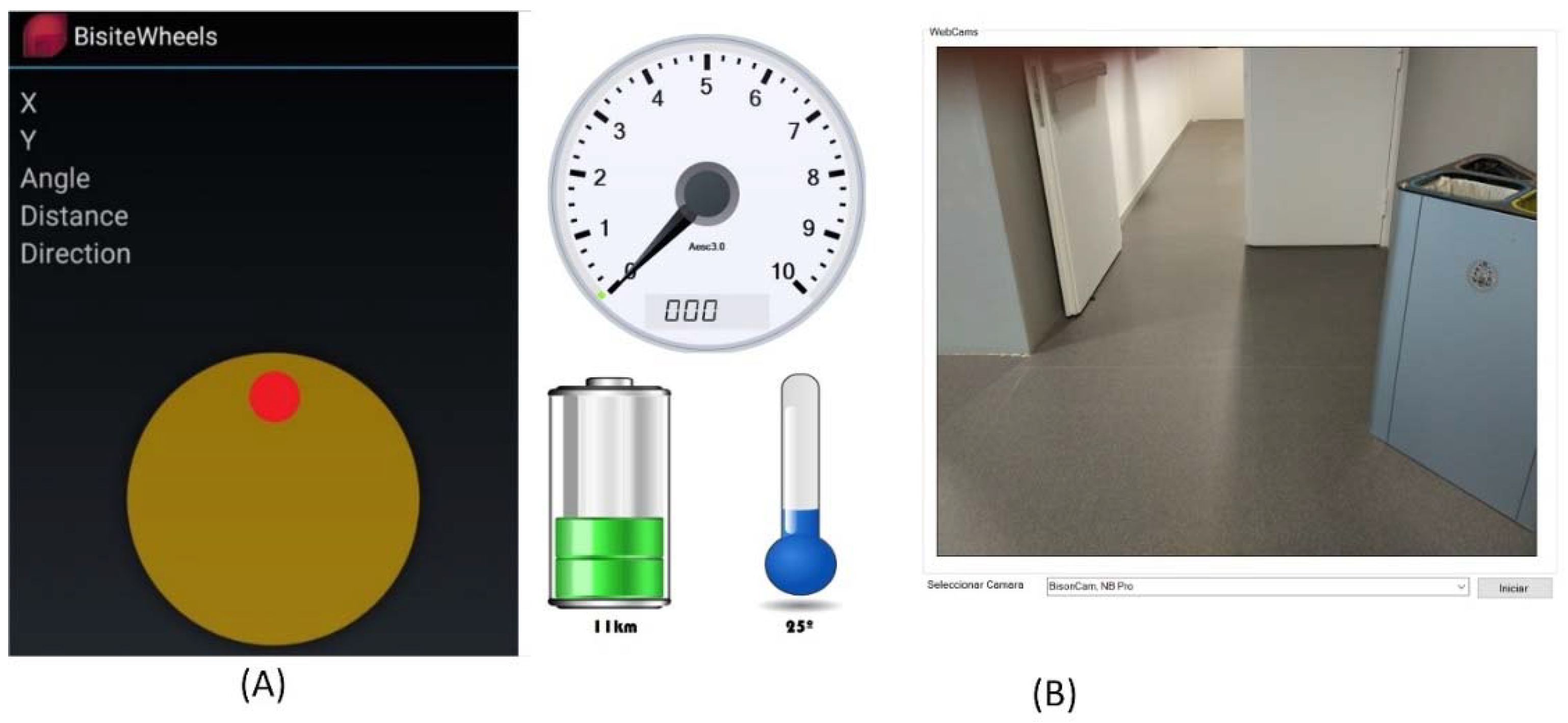
Figure 2A shows the correspondence between the different non-proportional commands and what is the direction of movement that occurs in the chair. Since through this type of control it is not possible to regulate the speed of movement of the chair, an additional command which allows to configure the power applied by the motors has been included. It is therefore possible to apply five different power levels, being level 1 the one of lower power and 5 level with the highest power.
Regarding the proportional controls, we have been inspired by the operation of the most common proportional control: the joystick. In order to emulate its operation, the control devices will be able to send commands to the developed board whose content implies not only a directional component of the movement to be carried out but also relative to its speed. With that purpose, these commands are composed of two values that represent the displacement in the
X and
Y axes, for which the value 0.0 corresponds to the central position of the joystick (chair stopped). The admitted values for the axes are defined according to:
The positive values for the
Y axis correspond to a forward movement and the negative values to a backward movement. In the case of the
X axis, negative values correspond to a movement to the left and positive values to a movement to the right. On the other hand, the higher the absolute value of the sent command, the higher the motor power delivery is, reaching the maximum value with 100 (See
Figure 2B).
In addition, a set of messages that inform the rest of the connected devices of the general state of the system have been included in the communication protocol. In this way, information regarding the battery charge status, the speed of the wheelchair, the temperature of the control board, or the status of additional components such as the lighting system or proximity sensors is provided. In the case of a traditional wheelchair, this type of information is not presented to the user, while it can be very useful. In the developed functional prototype, an interface for the visualization of this data has been implemented, as it will be shown later.
As it has been previously introduced, in order to carry out a series of tests that validate the correct functioning of the proposed system (as carrying out new investigations on control interfaces for wheelchairs) a functional prototype where the proposed system is integrated has been developed.
Figure 3 shows the main components of this prototype. As it can be seen, the central component of the system is the printed circuit board. It is designed to communicate with other devices in a bidirectional manner, so that it sends information about the current state of the system and receives commands with which to manage the operation of the wheelchair. In order to perform an effective control of the power applied by the motors, a specific controller has been incorporated for these, also integrated in the printed circuit board.
To represent the information about the state of the chair (level of battery charge, speed, or temperature among others), an application has been developed that in this case runs on a Microsoft Surface tablet that has been incorporated into the prototype. Thanks to the use of this application, real-time viewing of images captured by a camera located at the back of the chair is also done, allowing users with mobility problems in the neck to see what happens behind them. This tablet is connected to the control board via USB, which allows it to send orders, as well as receiving information. To improve the autonomy of the tablet battery, a current inverter has been incorporated. It is connected to the wheelchair batteries and allows the tablet to be fed through them. In order to improve the safety of the user of the chair, a network of ultrasound sensors (HC-SR04 model) has been included in the prototype. It allows the detection of possible obstacles in the chair’s trajectory, which allows us to act accordingly by stopping the wheelchair to avoid a collision. Also related to the safety of the user, the prototype has been provided with a lighting system, which on the one hand improves the visibility of the user and on the other one, it helps to warn other pedestrians of the movements made by the user of the chair, since it acts as an indicator of certain movements, such as lateral or backward movements. Finally, three control interfaces have been developed for the wheelchair: (i) making use of the mobile phone, which is connected to the board designed through Bluetooth; (ii) by voice commands, processed in the application of the tablet; (iii) through the data collected by a wireless electroencephalography device, whose signals are processed and interpreted on the tablet. These control mechanisms are described in detail in
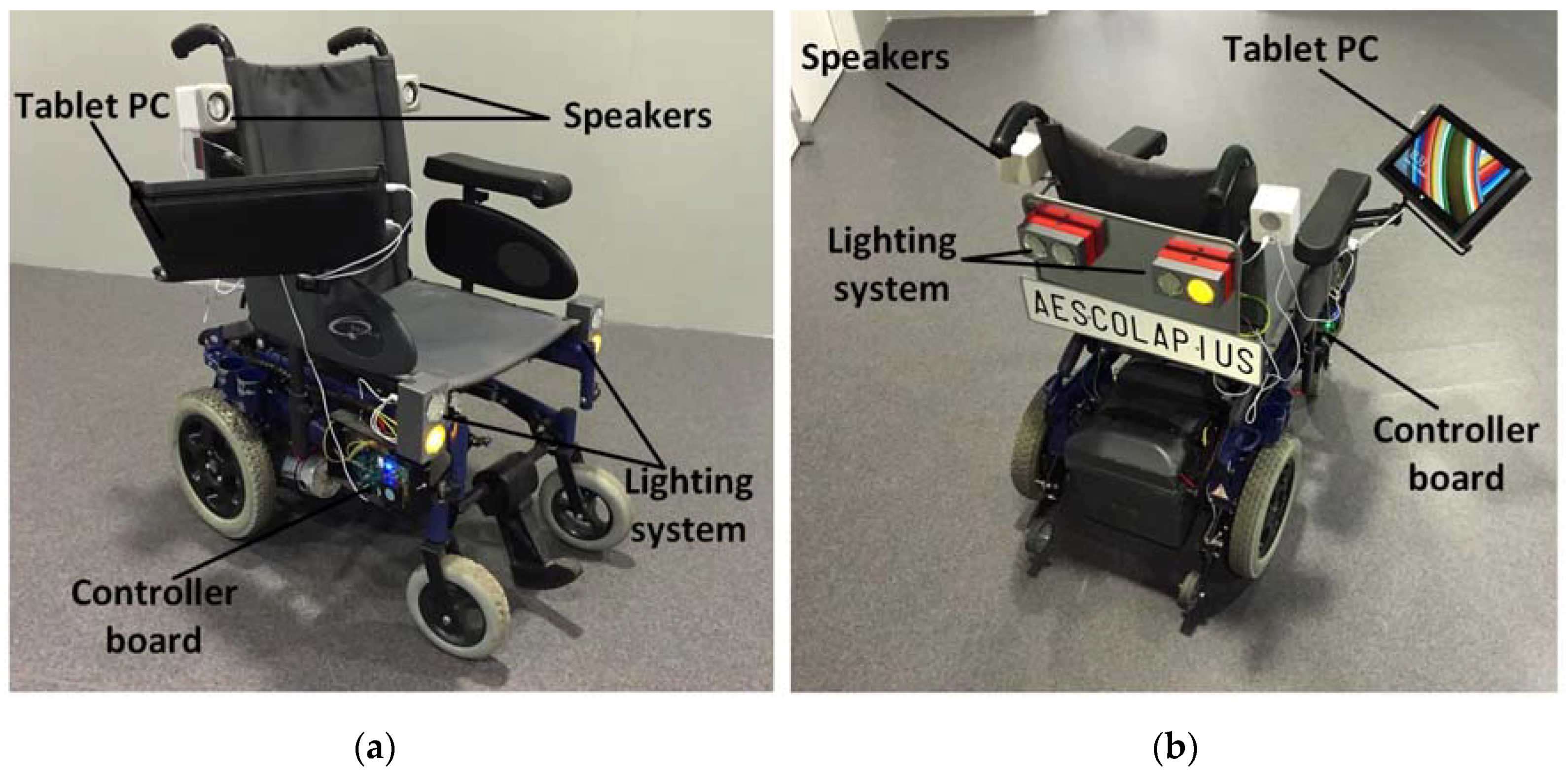
Section 3.2. Next, two photographs of the front (
Figure 4a) and back (
Figure 4b) of the developed prototype are shown.
3.2. Multi-Agent Architecture
In the case of the study that has been carried out, the architecture that supports the operation of the wheelchair control system is based on the use of VO of agents. The main reason to follow this kind of methodology is to provide the system with the inherent advantages of the use of VO, which are aimed at achieving more open and dynamic systems, in which agents have a set of roles and standards that determine their behaviour. The possibilities offered by the organizational aspects of this type of system can largely determine the flexibility, dynamism and openness of the multi-agent system. As a basis for the implementation of the multi-agent system, PANGEA has been chosen [
55]. It is a multi-platform agent platform created by the BISITE research group of the University of Salamanca for the development of open multi-agent systems, especially those that include organizational aspects. The platform allows the integration of organizations and offers a set of useful characteristics. From the agents’ perspective, different models of agents are included, such as BDI and CBR-BDL, while from an organizational perspective, it can be easily managed. Any organizational topology is allowed within this platform, while a business rules engine ensures the compliance with the standards established for the proper operation of the organization. Furthermore, a set of services is included which allow to dynamically reorganize the agents’ organizations or distributing tasks and balancing the workload. Furthermore, a useful set of tools is included for end users, as graphic tools to control the agents’ life cycle, debugging and service discovering tools or an interface to oversee the organizations. From a communicational perspective, PANGEA allows the use of different communication protocols. Some of these protocols are focused on communication between embedded devices, so it is a platform that matches the requirements necessary for the development of this system. Moreover, the possibility to interact with FIPA-ACL agents is supported.
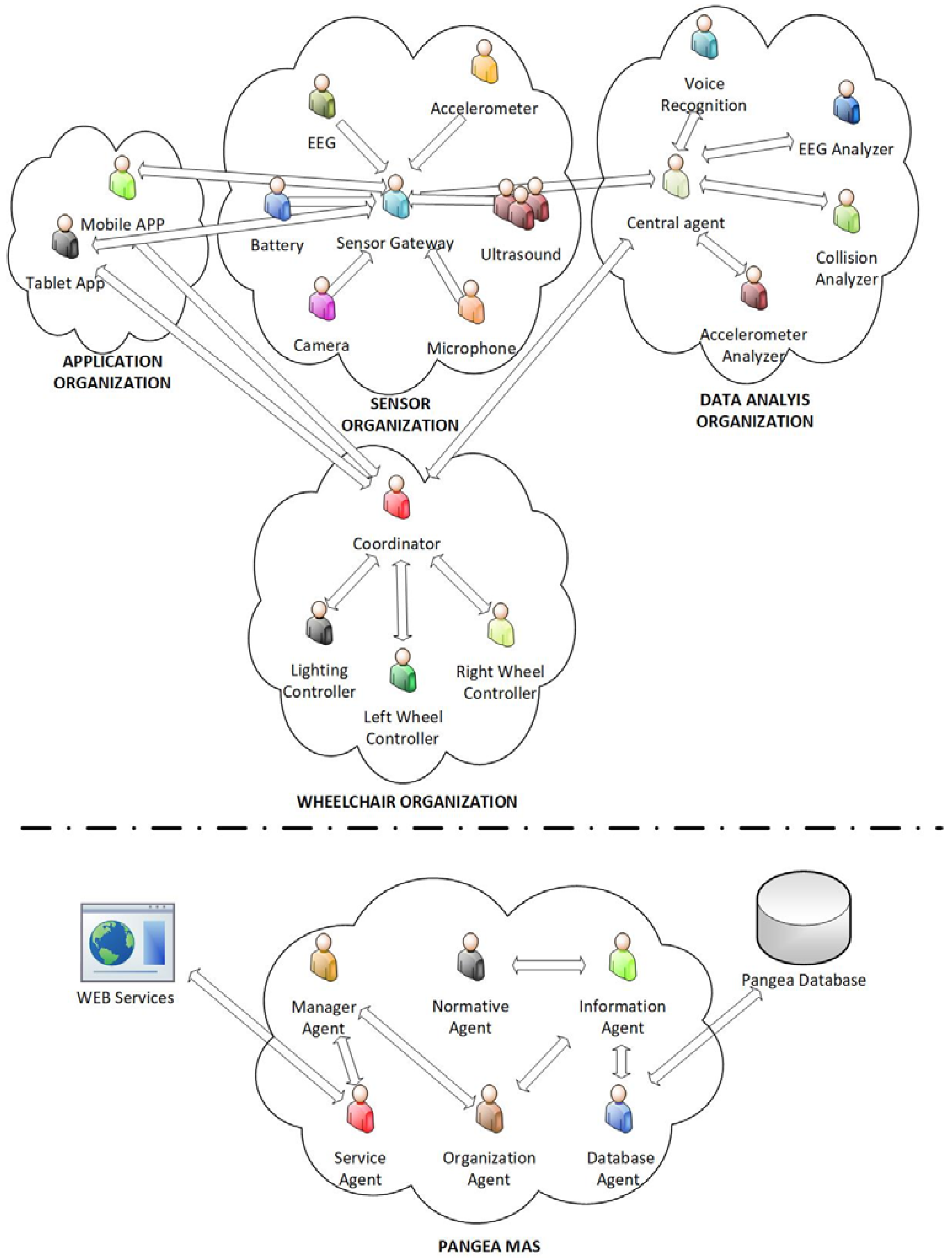
Figure 5 shows the organizational structure of the proposed multi-agent system, responsible for the management of the platform. On the one hand, the upper part is specifically designed for this case study, while the lower part shows those agents proper of PANGEA. Next, the functionality provided by the different organizations of agents that make up the system is detailed:
Sensor organization: the purpose of this organization is to collect data from a set of hardware sensors for subsequent representation and analysis by other agents in the MAS. As a central part of this organization, the Sensor Gateway Agent is responsible for collecting the data of the agents embedded in the sensors present in the system, normalizing the collected information and transmitting it to those agents of the rest of the organizations that request it. In the case of study presented in the article, the sensors involved in this organization are: battery (knowing the battery level of charge), EEG, accelerometer (obtaining the smartphone accelerometer data), ultrasound (proximity sensor), microphone and camera.
Data analysis organization: based on the data provided by the sensor organization, the agents that are part of this organization are in charge of analysis to carry out decision-making processes related to the control of the wheelchair. Within this organization, a central agent is incorporated. It is in charge of sending the necessary data from the sensors to the rest of the agents of the organization, who are responsible for analysing it. After these processes, the central agent will receive back instructions regarding the control of the wheelchair. This agent will communicate these instructions to the organization in charge of managing the wheelchair organization. In the event that the decisions made by the agents of this organization come into conflict, the central agent is responsible for managing their priority. Among the other agents of the organization are: the voice recognition agent. which, through the audio signal collected by a microphone, uses a speech recognition system to interpret different commands with which to control the chair; the EEG analyser that analyses the data collected by an electroencephalogram device to control the wheelchair; the Collision Analyser, which attending on the signals collected by the proximity sensors, is responsible for taking the control of the wheelchair to avoid possible collisions and the Accelerometer Analyser, which analyses the data obtained from the smartphone embedded accelerometer in order to control de wheelchair and also to detect possible falls of the smartphone.
Wheelchair organization: responsible for carrying out the control on different components of the wheelchair. The Coordinator Agent is the central agent in charge of the coordination of the organization. The Right and Left Wheel Controller agents are in charge of the individual control of each of the motors and the Lighting Controller Agent is responsible for the control of the lighting system that incorporates the wheelchair.
Application organization: For the end user to be able to view the information collected from different sensors, a tablet software application has been developed. The agent responsible for collecting this information and also responsible for the visualization layer of the application is the Tablet App agent. This organization also includes the Mobile App agent, responsible for managing the wheelchair control system based on the smartphone touchscreen.
On the other hand, the proposed architecture is based on the use of the agents provided by the PANGEA platform [
55]. These agents are responsible for tasks such as: (i) supervision of the correct performance of tasks (manager agent); (ii) the registration of the agents and services present in the system (information agent); (iii) control of the correct operation of the services offered by the agents and their distribution through web services (service agent); (iv) guarantee the correct compliance of the rules defined in the organizations (normative agent); (v) access to database (database agent); or (vi) management of the different organizations that make up the system (organization agent).
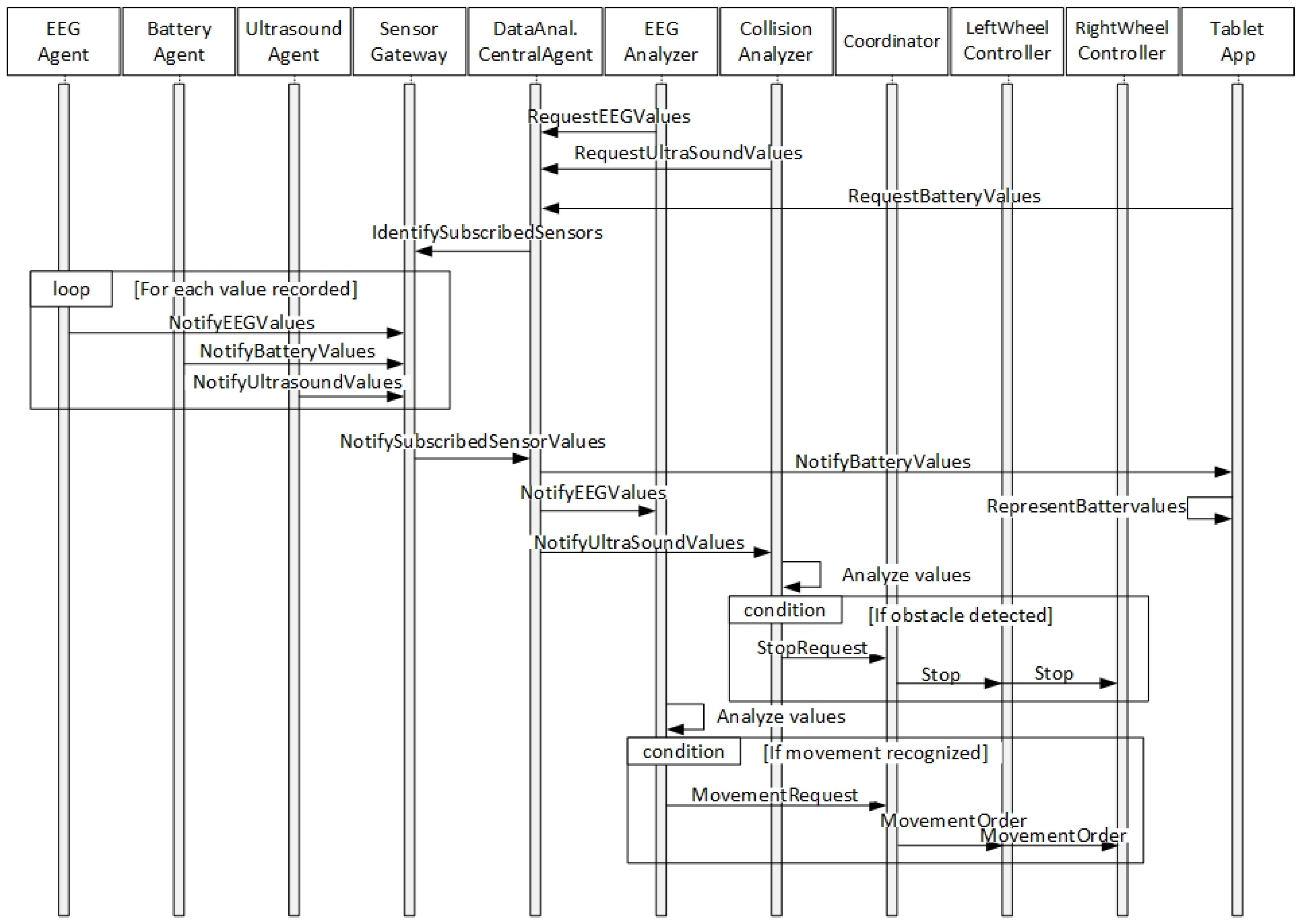
The general operation of the processes occurring in the platform for a specific control interface can be seen in
Figure 6. In this case, EEG control interface has been chosen to represent the platform’s operation processes. Firstly, agents within Data analysis organization that are involved in the selected control interface perform a subscription request to the central agent of this organization. In this request, these agents specify which data coming from the hardware sensors is needed for their proper functioning. In this case, two agents will work in parallel: EEG Analyser and Collision analyser. EEG analyser is in charge of performing the portable EEG device data analysis to infer which movements does the user want to perform, while the Collision analyser works with the ultrasound sensors data to detect possible environment collisions. Thus, the data subscription request performed by these agents are the EEG and the ultrasound sensors data in each case. Subsequently, the data request from this organization to the sensors organization is done to the sensor gateway agent, which collects all the data coming from the different agents in charge of obtaining information from the different deployed sensors. As EEG and Ultrasound agents send their corresponding hardware data to the sensor gateway, this information is redistributed to the data analysis central agent (only subscribed information is sent). As the requested information is provided to each analyser agent, it is evaluated by each of the agents. In the case of the EEG analyser, if a certain pattern associated with a movement is recognized, a movement request is performed to the wheelchair organization’s coordinator agent, while if the Collision analyser detects a possible impact, a stop request is done. When a request is done to the coordinator agent, it is in charge of evaluating it according to its priority. For instance, in this case, the collision analyser requests will always have a higher priority. Once the requests are accepted, the corresponding order is sent to the wheel controller agents to perform the physical movement. Additionally,
Figure 6 also shows how the information represented in the tablet App is provided through the agents’ organizations. The battery information flow is provided as an example.
3.3. Control Interfaces
3.3.1. Smartphone
In some cases, users of wheelchairs (manual or electric) cannot drive independently due to limitations in the environment (large slopes, reduced space), or physical limitations. In these situations, it is necessary to resort to a second person who assists the user of the wheelchair and does not always have the necessary strength to move the chair without having to make a great effort. Obviously, controlling a motorized wheelchair while walking by using the traditional joystick is not easy. For this reason, to facilitate its operation by the attendees, certain models of electric wheelchairs have controls which are specially designed for attendees. These controls are usually located in the back of the wheelchair to ease its use. In this way, it is the assistant who controls the direction of the chair, while the motors make the effort to move the chair. Although this option is available for several models of chairs at present, not all models offer the possibility of integrating a system of these characteristics and in case of doing it, the price is generally high.
Faced with this situation, it has raised the possibility of developing a control system for assistants that is affordable, accessible to anyone and intuitive to use. To carry out this system, we have chosen to use smartphones. This decision is fundamentally motivated because its penetration of use is increasing, so that a large part of the population has one (reaching a penetration of 78% of the total population in the case of the US, or 87% in the case of Spain [
61]) and, in addition, they have great connectivity and ways of interacting with them. In this paper, we propose three alternatives for controlling a wheelchair through the mobile phone: one by using the accelerometer of the mobile phone and two by using the touch screen of the mobile phone. All these alternatives make use of the Bluetooth communication between the mobile device and the designed control board, sending through this communication channel the necessary commands for the movements of the relevant wheelchair.
Most smartphones have an acceleration sensor embedded inside. This sensor allows to measure the inclination of the device in relation the ground. Using this sensor, a non-proportional control method for the wheelchair based on the inclination of the mobile phone has been developed. To do this, a finite state machine is defined with possible states (front, back, left, right and stopped). The transition between states will be made based on a series of thresholds for the values recorded by the accelerometer for the
X,
Y and
Z axes.
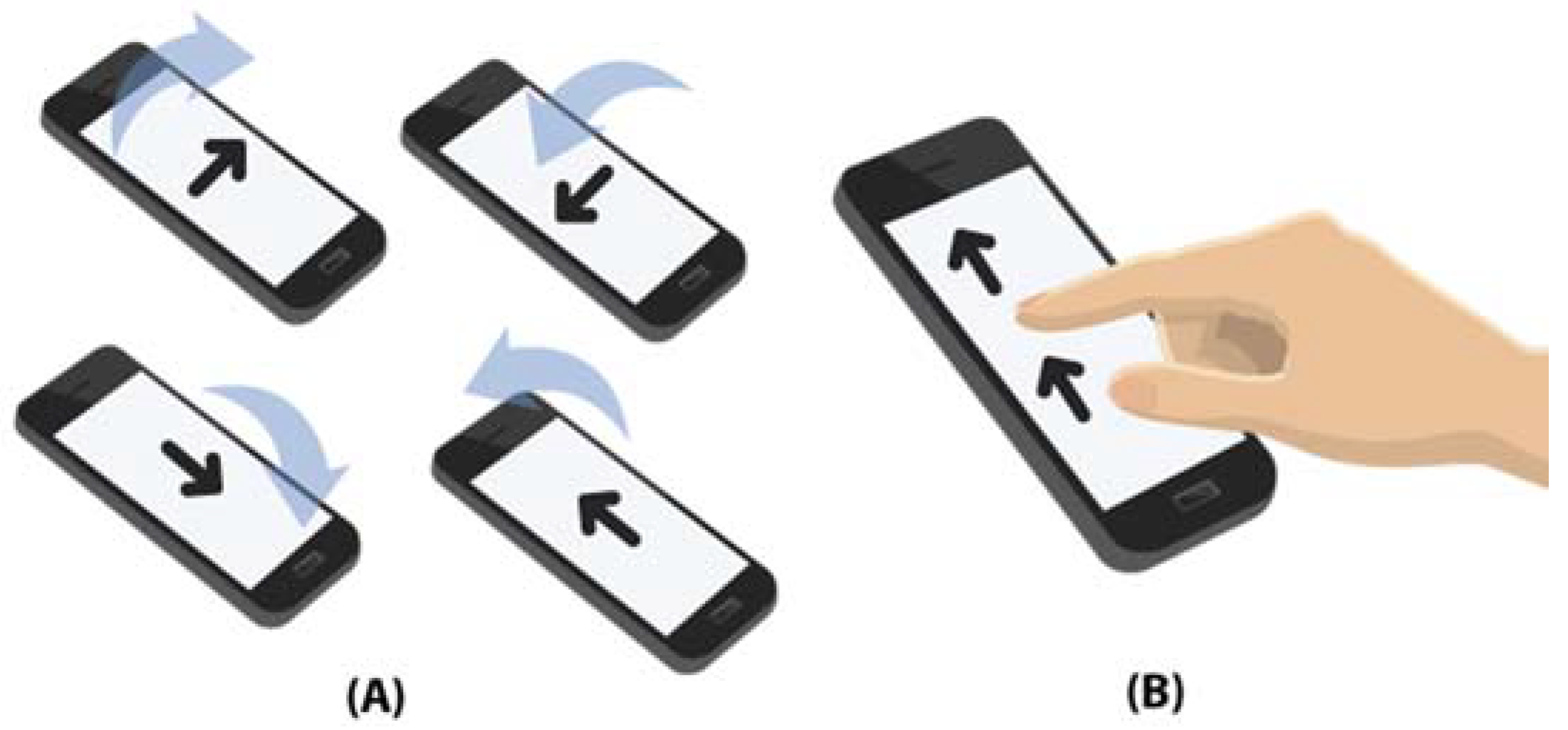
Figure 7A shows how the mobile phone should be tilted to make a movement in the wheelchair. For example, tilting the phone as shown in the upper left of the image corresponds to a forward movement.
Although the accelerometer-based control is very intuitive, the most common form of interaction with a smartphone is through a touch screen. For that reason, there may be users who are more comfortable using this element as a wheelchair control interface. On the other hand, it can be a more suitable control method for wheelchairs users that have good mobility in their hands but not enough strength to be able to easily use a joystick. This kind of control is a possible substitute for low cost control interfaces based on the use of touch panels, the price of which is generally high, such as the Switch-It TouchDrive 2 [
18], which exceeds 3000€. To integrate this option in a conventional wheelchair, it will be enough to incorporate a small support for the mobile phone in the armrest of the chair, so that it is placed under the user’s hand. Two alternative touch screen-based control methods are proposed.
The first one is a non-proportional method, which allows the transition between 5 states (the same ones used in the case of the accelerometer).
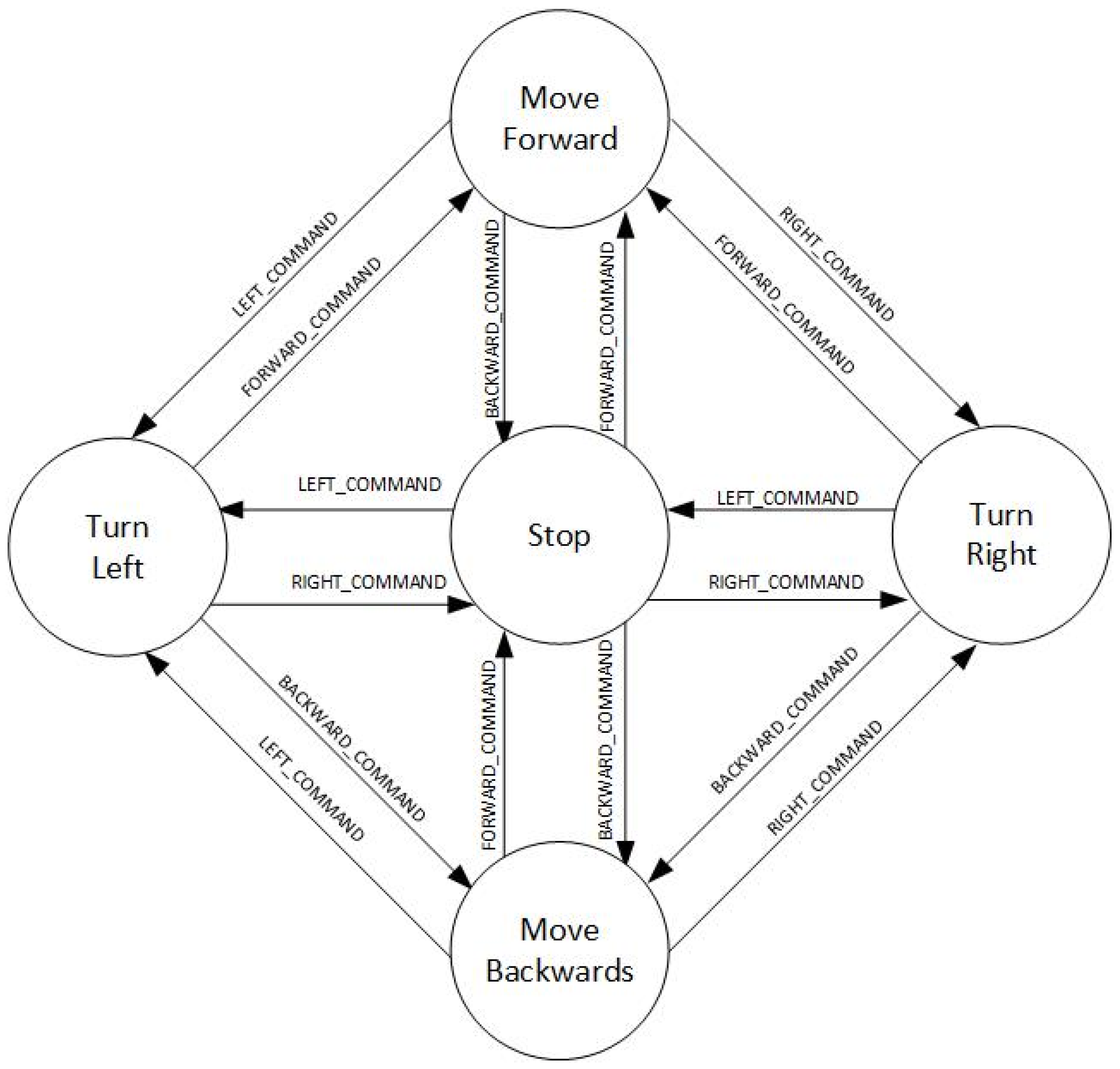
Figure 7B shows how to interact with the touch screen of the mobile device: sliding a finger in the specific direction in which the user wants to move. For example, to make the wheelchair to move forward, you must slide your finger from the bottom of the screen to the top. To cancel the movement, that is, to make the chair stop, the opposite movement has to be made, in this case from the top to the bottom. It will be possible the direct transition between all the movements, excepting the opposite movements (since they imply that the chair stops).
Figure 8 shows the possible states transition of the non-proportional touch screen-based control.
Algorithms 1 and 2 shows the pseudocode of how the non-proportional touch screen-based control is implemented. As it can be observed, Algorithm 1 oversees analysing the press and release coordinates on the touch screen, while Algorithm 2 evaluates the results of Algorithm 1 to perform the corresponding movement requests: moving forward, backward, left, right or stopping the wheelchair.
The second touch screen-based method is a proportional control method that emulates the traditional joystick of a wheelchair. Although the kind of control offered by this method is analogous to the one offered by a joystick, its use is proposed for those people with partial mobility in their hand but who can move a finger in a controlled manner in a small space, in the same line as other control devices based on the direction of the finger, such as the DX-RJM-VIC [
62].
| Algorithm 1. onTouchEvent. |
| Input:motionEvent |
| Output:None |
| Variables:xi, yi: point when press, xf, yf: point when release; xr, yr: relative coordinates |
| ifevent.getAction == MotionEvent.ACTION_DOWNthen |
| xi = event.getX() |
| yi = event.getY() |
| else if event.getAction() == MotionEvent.ACTION_UP then |
| xf = event.getX() |
| yf = event.getY() |
| yr= yf – yi |
| xr = xf – xi |
| if abs(xr) >= abs(yr) then |
| if xr > 0 then |
| if a < 1 then |
| a++ |
| else if a == 1 || a == .1 then |
| b=0 |
| end if |
| sendCommand(a,b) |
| else |
| if yr > 0 then |
| if b < 1 then |
| b++ |
| else if b == 1 || b == −1 then |
| a = 0 |
| end if |
| sendCommand(a,b) |
| else |
| if b >= 0 then |
| b++ |
| else if b == 1 || b == -1 then |
| a = 0 |
| end if |
| sendCommand(a,b) |
| end if |
| end if |
| end if |
| end if |
| Algorithm 2. sendCommand. |
| Input:a,b |
| Output:None |
| ifa==0 && b == 0then |
| requestStop() |
| else |
| if a == -1 then |
| requestLeftMovement() |
| end if |
| if a == 1 then |
| requestRightMovement() |
| end if |
| if a == 1 then |
| requestForward() |
| end if |
| if a== 1 then |
| requestBackward |
| end if |
| end if |
3.3.2. Voice Control
In order to make the use of a motorized wheelchair more accessible to those people who cannot perform physical movements, an additional control interface based on voice control has been developed. By using different voice commands, the user can control wheelchair movements in a non-proportional way. Despite being a non-proportional control, it also incorporates a command that allows controlling the speed of the chair at different levels. On the other hand, by incorporating this type of interface, the possibilities of interaction with the user multiply. To take advantage of this potential, additional functionalities have been incorporated, so that users can check the news or weather information, switch on and off the lights we have incorporated into the system or send an emergency signal.
The application that handles voice recognition management runs on the Microsoft Surface tablet and is active by default. To perform speech recognition, the voice recognition API of the .NET Framework has been used. The main advantage that this API offers over others is that it performs the voice recognition process locally, without the need to interact with any external server. In addition, it allows to establish grammatical restrictions to a finite set of alternatives, which in this case correspond to the commands admitted by the system. The use of technologies that depend on a stable network connection could compromise the user’s security when it is unstable. To prevent the commands that control the movement of the wheelchair from being activated unintentionally, since they could appear in any normal conversation that the user kept, a keyword has been included in all the commands, except for the command that makes that the wheelchair stops. Next,
Table 3 collects the commands admitted by the system together with the system response for each of them.
3.3.3. EEG
Many wheelchair users suffer from diseases that prevent them from using the motion interfaces presented in the previous sections. For example, diseases such as amiatrophic lateral sclerosis (ALS) or spinal cord injuries that are likely to result in total or partial paralysis. It is therefore essential to include a motion interface that allows wheelchairs to be used for this type of person. This is where the use of EEG-based technologies is proposed as an alternative to the methods proposed above.
The EPOC+ helmet designed by the Emotiv Company (San Francisco, CA, USA) is used to implement an intelligent system capable of using EEG-based technology. It is a Neuroheadset device. An image of the device used is shown in
Figure 9a. The helmet is made up of a total of sixteen sensors that work with a conductive liquid of the current, such as contact lens liquid. Fourteen (AF3, AF4, F7, F8, F3, F4, FC5, FC6, T7, T8, P7, P8, O1, O2) of these sensors are data channels and the other two (P3, P4) are the so-called location sensors.
Figure 9b shows the distribution of the different sensors once a person has placed the helmet. As it can be observed in
Figure 3, the wireless electroencephalography device is directly connected to the Tablet PC and not to the platform built-in Bluetooth. The reason is that it requires to be connected to a specific USB Bluetooth receiver developed by Emotiv.
The Emotiv EPOC+ helmet is able to recognize affective, expressive and cognitive cases. To do this, it measures brain activity by means of an electroencephalogram. Cognitive casuistry is what will be taken into account to implement the system that will allow the wheelchair to move. The system is designed in such a way that the user can use abstract thoughts or observe specific images to guide the wheelchair.
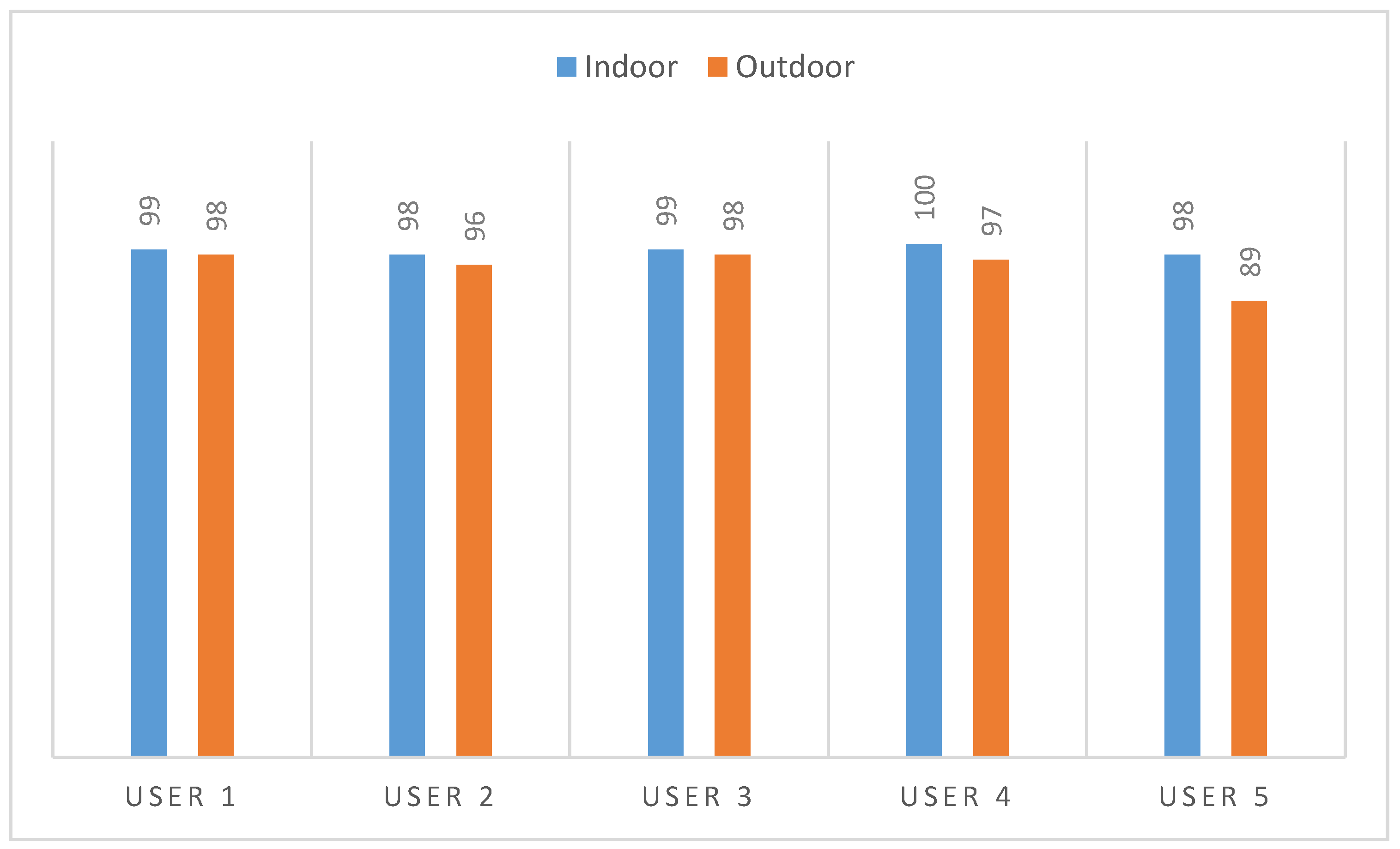
In this way, data will be collected from various people to test the effectiveness of the system and the designed motion interface. Each of these people will be made to think of a series of abstract concepts, specifically four, in such a way that each of these thoughts is later related to the four movements that can perform the electric chair, left, right, front and back. In the same way, four arrows will be related to each of the four previous directions. In the latter case, the user will have to react to the stimulus by looking at each of the four arrows.
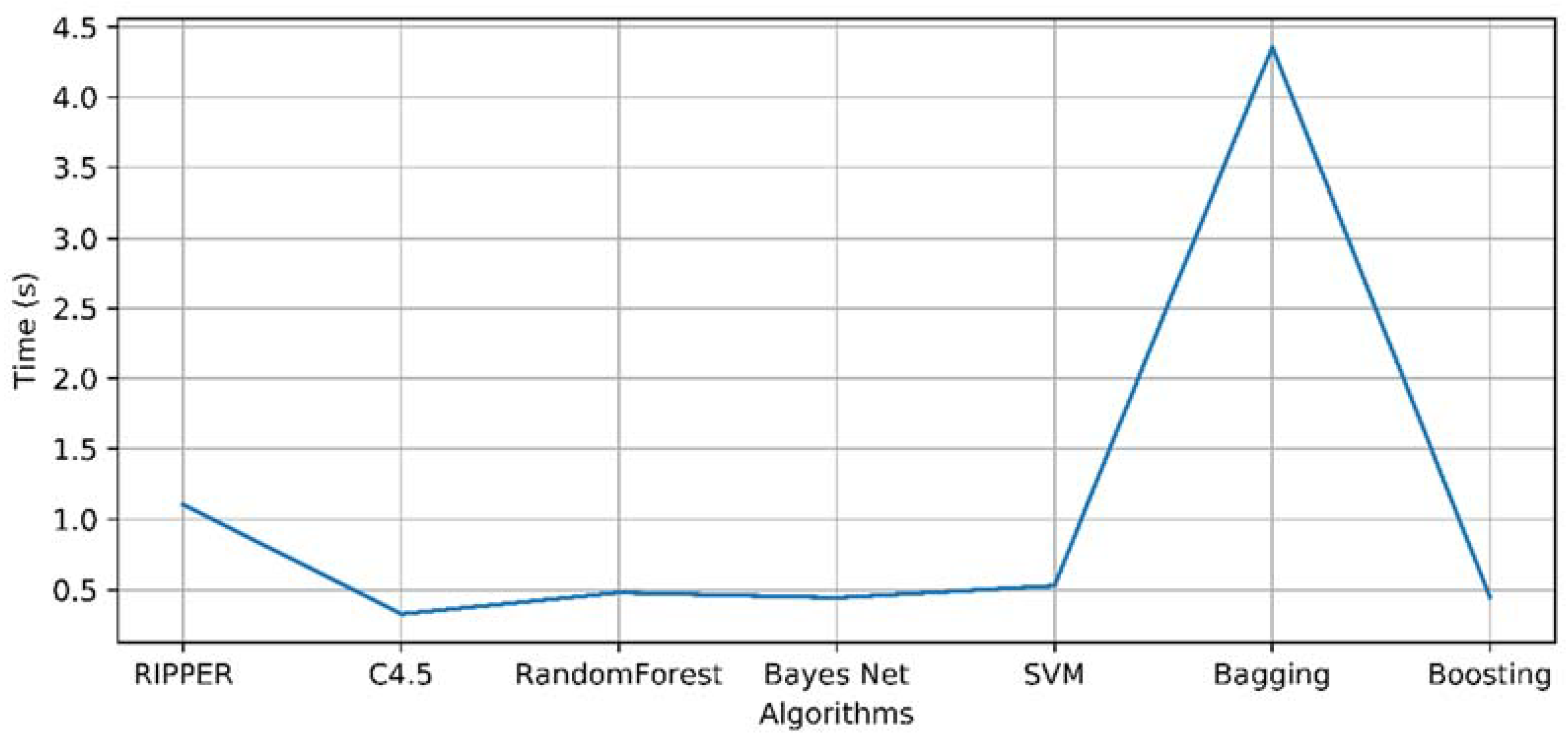
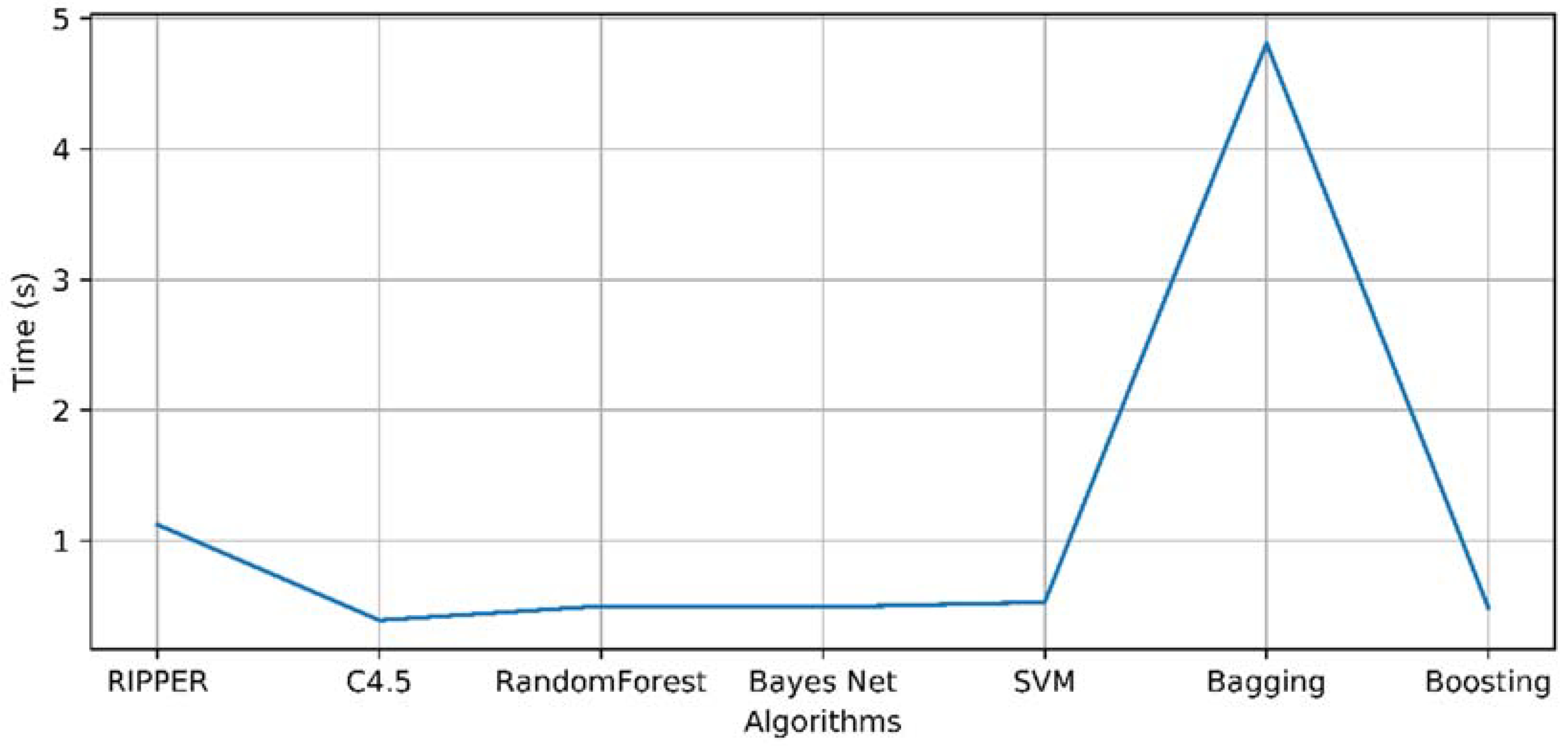
For each of the users, different datasets will be extracted since each one of them thinks in different concepts and they do not have the same reaction when visualizing the images. This data set will be obtained each time individuals use the interface. With each use, there will be a small initial training stage of about 40 s. This stage of the user’s initial adaptation to the helmet is necessary since, although the same thoughts are always related to each of the thoughts, the brain response may not be the same in each of the interface applications. Once this training phase is completed, the generated dataset will be used to train the model that will then be used to move the wheelchair. In order to obtain these models, it is necessary to apply a pre-processing that helps the identification of movement patterns. The Results and Conclusions section will show how several models with different machine learning techniques are constructed in order to determine which of them offers the best results when evaluated. The algorithms to be used are tree-based methods and decision rules, role-based learning, Bayes’ theorem, as well as meta-classifiers. All of them will be explained later in this section.
Processing of Raw Data
The different steps of the processing of raw data obtained from helmet readings are explained below.
Signal Sampling
As indicated in
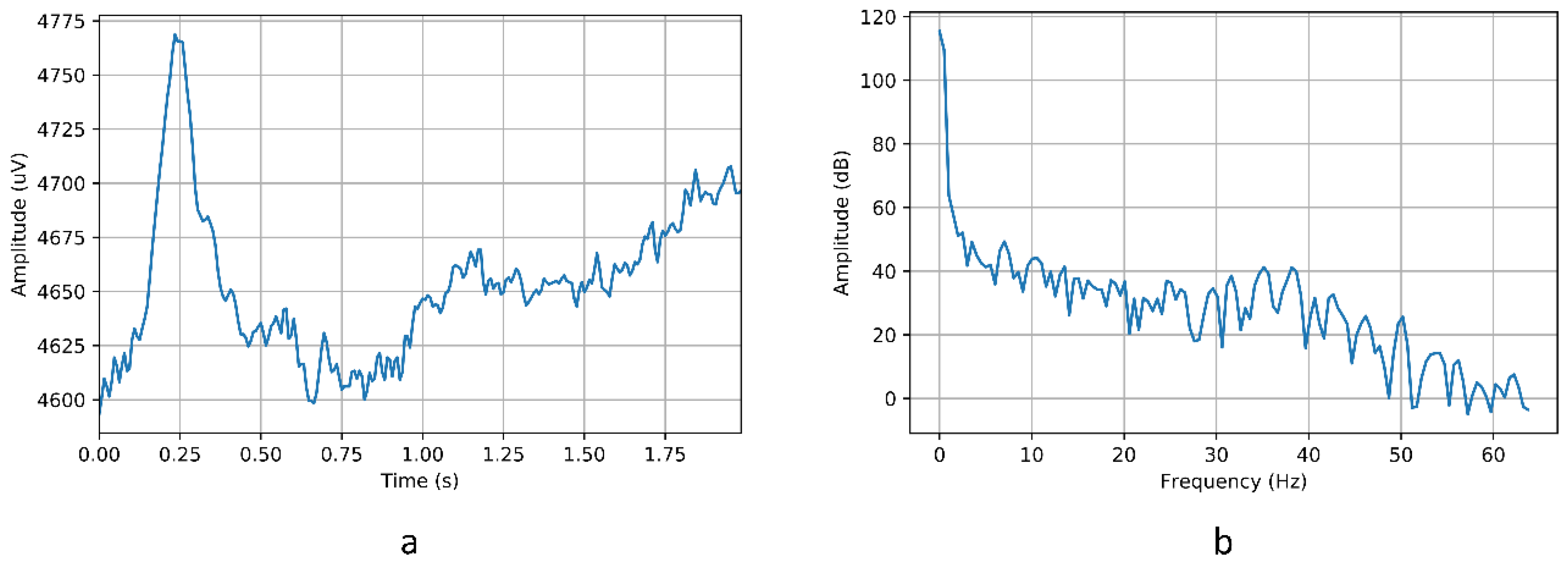
Section 3.3.3, the Emotiv EPOC+ helmet is capable of obtaining 14 bioelectric records from its fourteen sensors. Each of these signals is sampled at a frequency of 128 Hz, that is, for every second 128 samples per sensor are obtained. In this way, the time domain signal is obtained for each sensor. However, it is necessary to pass the signal to the frequency domain in order to be able to better recognize the patterns within each signal, just as it is performed in work [
46].
From each signal, a 2-s window has been chosen for the Fourier transform, with a shift of 0.5 s. In other words, 256 values are selected, with a shift of 64 values. For each time window, the Fourier transform is applied. Unlike other works that recommend the use of windows of 5 s, in this work has been chosen 2 s as window by the delay that represents when detecting the movement and perform it.
Model Construction Techniques
As for the algorithms that will be used to determine the movement of the chair, according to the data pre-processing, are explained below. With these techniques, we will analyse which of them is best suited to the casuistry of the problem, in order to make a classification as accurate as possible.
RIPPER
The Repeated Incremental Pruning Produce Error Reduction algorithm or better known by its acronym RIPPER is an algorithm that evolves from the IREP (Incremental Reduced Error Pruning) algorithm and in turn this last algorithm is a combination of the REP (Reduced Error Pruning) algorithm and the divide and beat technique.
The IREP algorithm was described by Fürnkranz and Widmer [
63]. It is a technique that makes use of decision trees to determine the class to which the different instances correspond. Cohen improves this algorithm and called it RIPPER. The improvements of this algorithm include the pruning function of the tree, a new criterion for stop addition process based on heuristics and a new optimization step after the rule set. For more information about the implementation of the RIPPER algorithm see the original article of Cohen [
64].
C4.5
Algorithm C4.5 is an evolution of the original ID3 whose main advantage is that it allows numeric attributes to be incorporated into the logical operations carried out in the test nodes. Currently, there are new versions of this algorithm such as C5.0 but it is a commercial version. J48 is the implementation of C4.5 in Java and is available in data mining tools like Weka. It is one of the most used techniques together with CART since both allow the use of numerical attributes. C4.5 tries to minimize the width of the decision tree through heavy search strategies. To do this, two terms are defined, the gain and the rate of gain based on the information
contained in a node
. Using only the criterion of gain, attributes with many values are favoured since they favour the division of elements into numerous subsets, to avoid this the concept of the rate of gain is added. The idea was proposed by Quinlan [
65]. In this book, the researcher explains how the algorithm works.
Random Forest
The Random Forest algorithm is somewhat inspired by Bagging algorithms and the bootstrapping technique. The original idea of the Random Forest is to improve the reduction of variance in Bagging, reducing the correlation between trees that are generated without reducing too much variance. This idea was proposed by Breiman [
66]. This is achieved during the stage of tree creation and growth, thanks to the selection of random variables that will compose the tree.
The algorithm does this by creating a series of random trees, where the random factor is determined by the variables that are selected to form the tree. In [
66] the process is explained.
Bayesian Network
The Bayesian network-based algorithm is a probability-based model that relates to a set of random variables using an acyclic-directed graph that allows Bayesian inference to be used to determine the probabilities of unknown variables from others that are known. Bayesian networks are composed of nodes, one for each random variable and by directed arcs that relate the nodes. In addition, it is known that the probability of each node is conditional on that of the parent node. Full explanation about this algorithm is defined by Su and Zhang [
67].
It is important to point out that in case any attribute has continuous values, it is necessary to make a discretization of the data, since if not this type of variables makes it very difficult to calculate the probabilities.
SVM
The SVM (Support Vector Machine) algorithm is one of the algorithms that will be applied for the classification task. The technique of this algorithm consists of constructing hyperplanes in the space in which the data are represented, so that these hyperplanes maximize the distances between the different classes. This technique is explained in more detail in the article written by Vapnik [
68]. This technique is one of the most widely used classification techniques that use data in the frequency domain. In addition, this technique also offers very good results compared to other techniques.

 ,
, 



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}