Demonstration of a Speckle Based Sensing with Pulse-Doppler Radar for Vibration Detection



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
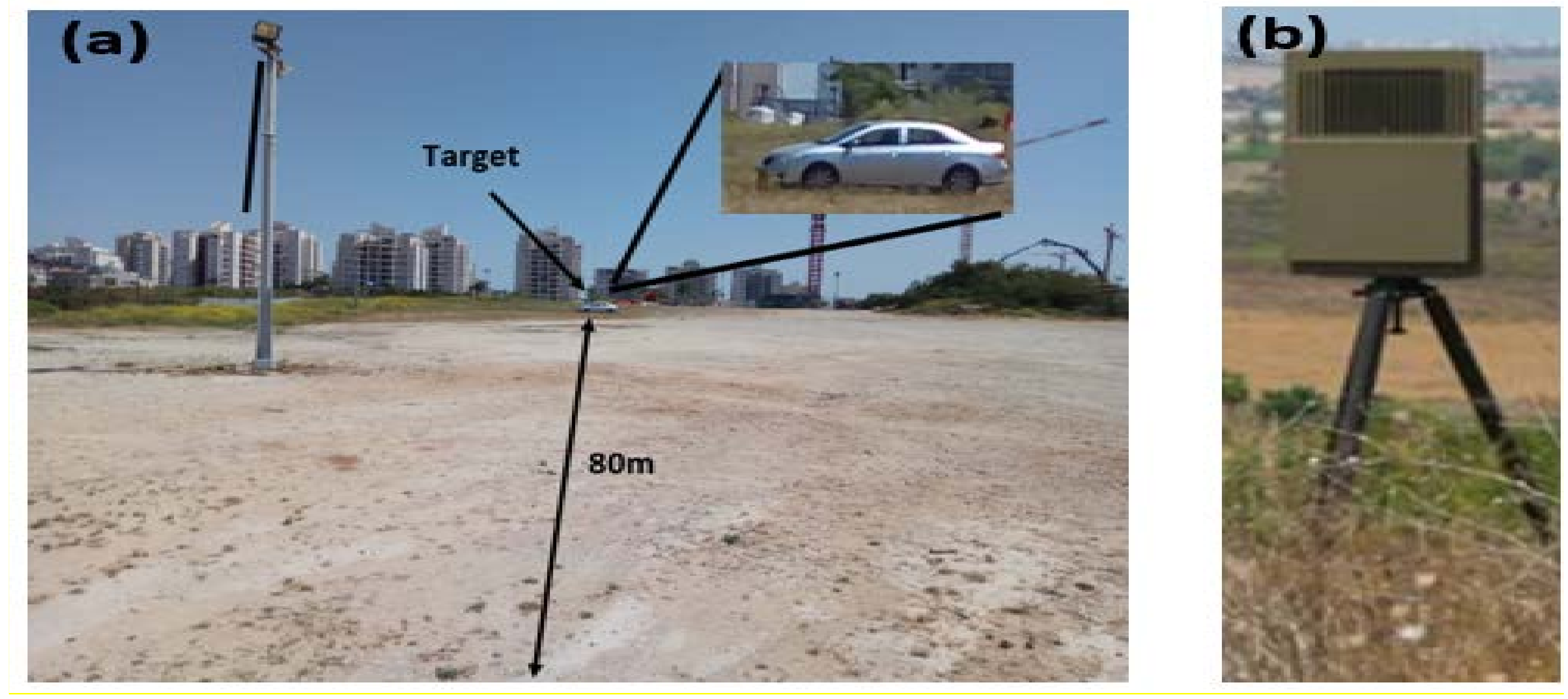
2. Experimental Setup—Pulse-Doppler Radar
3. Experimental Results
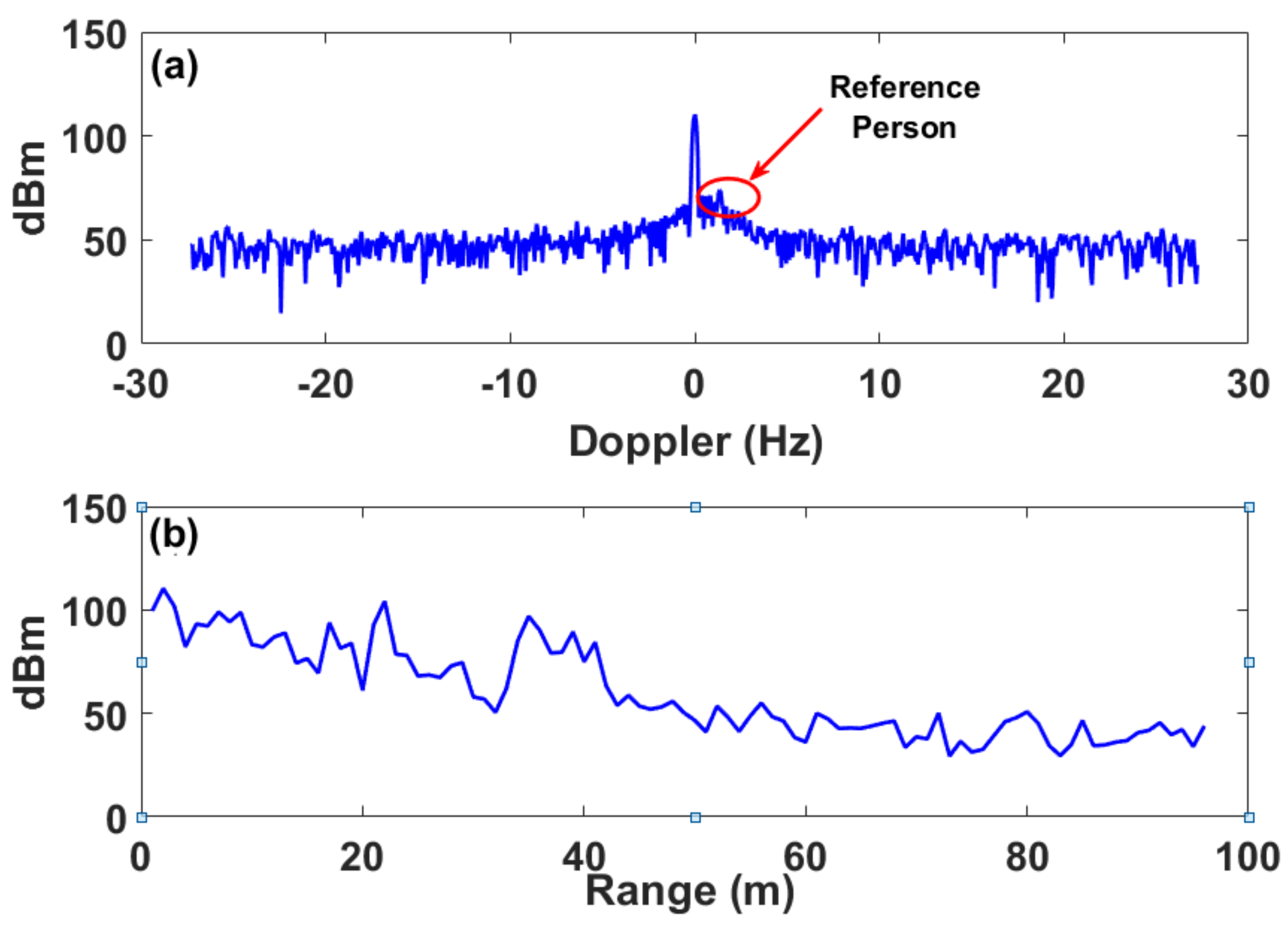
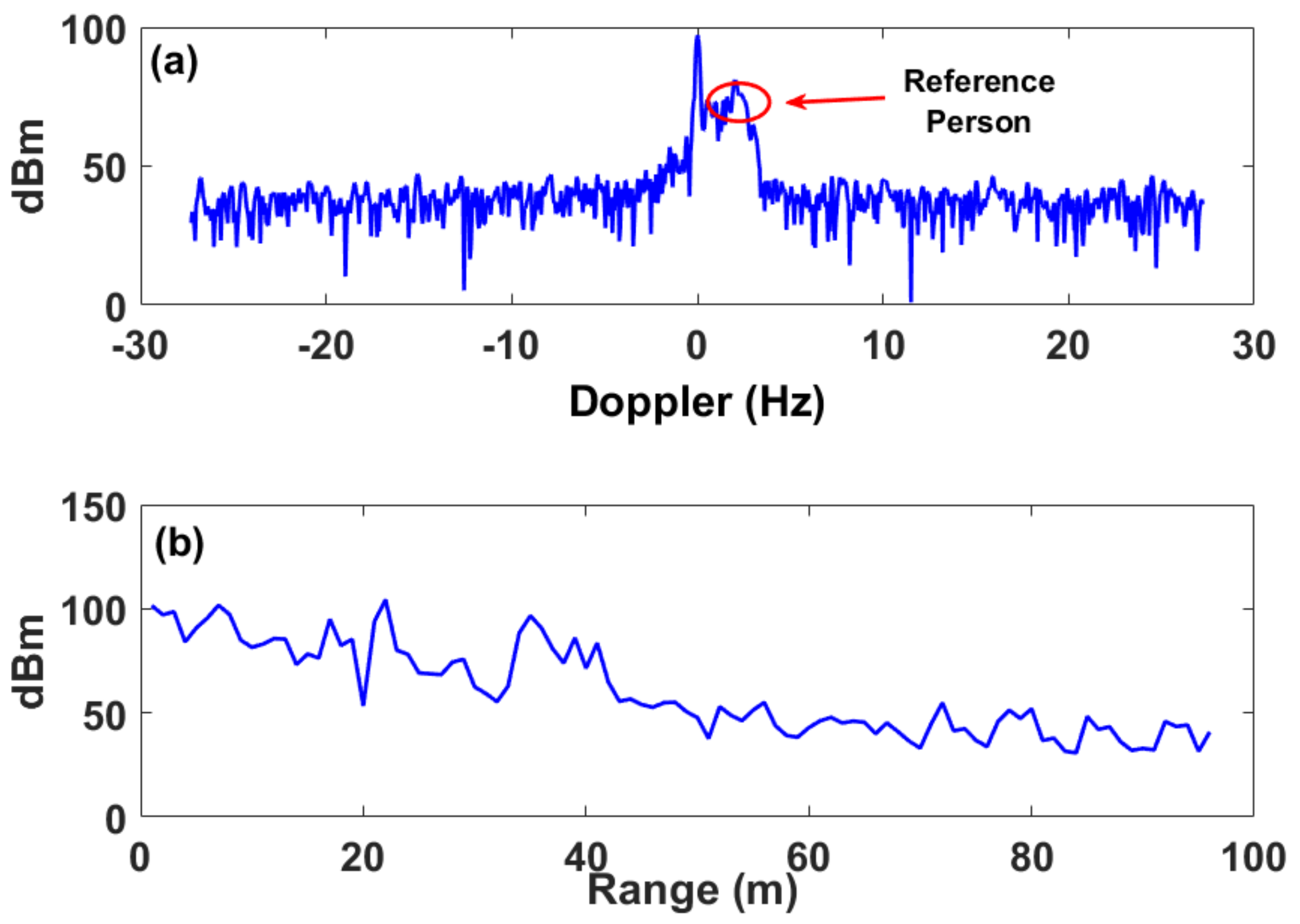
3.1. Remote Vibrations Monitoring Using Doppler Technique
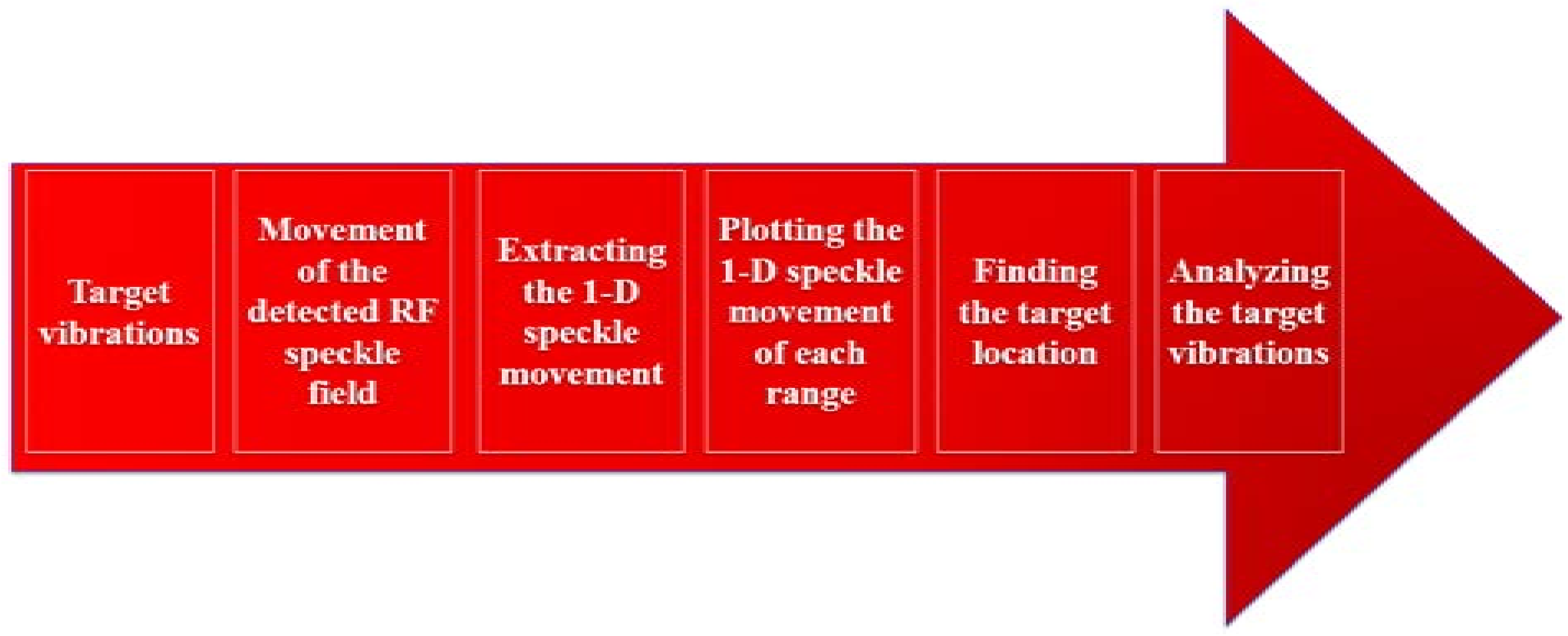
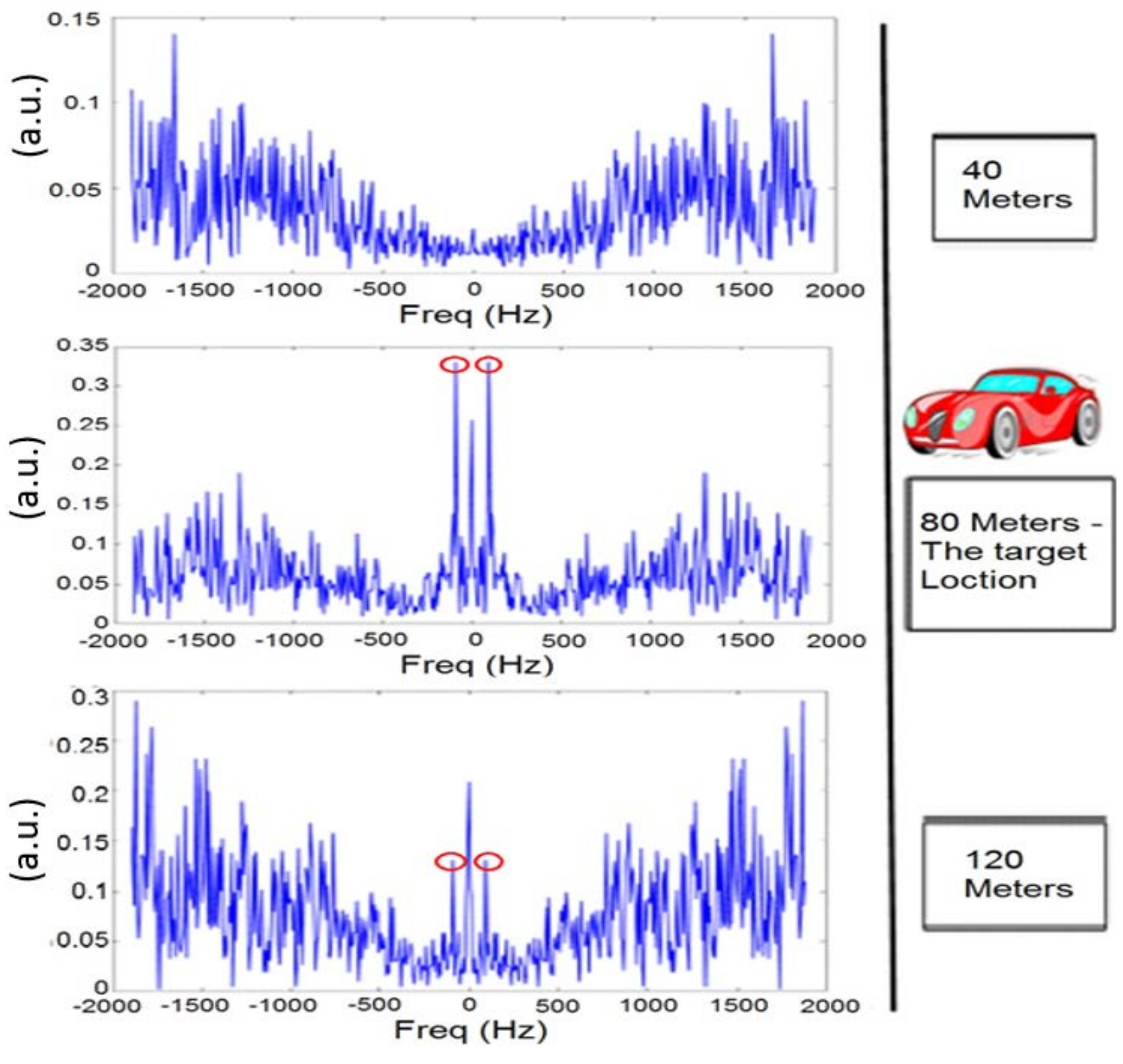
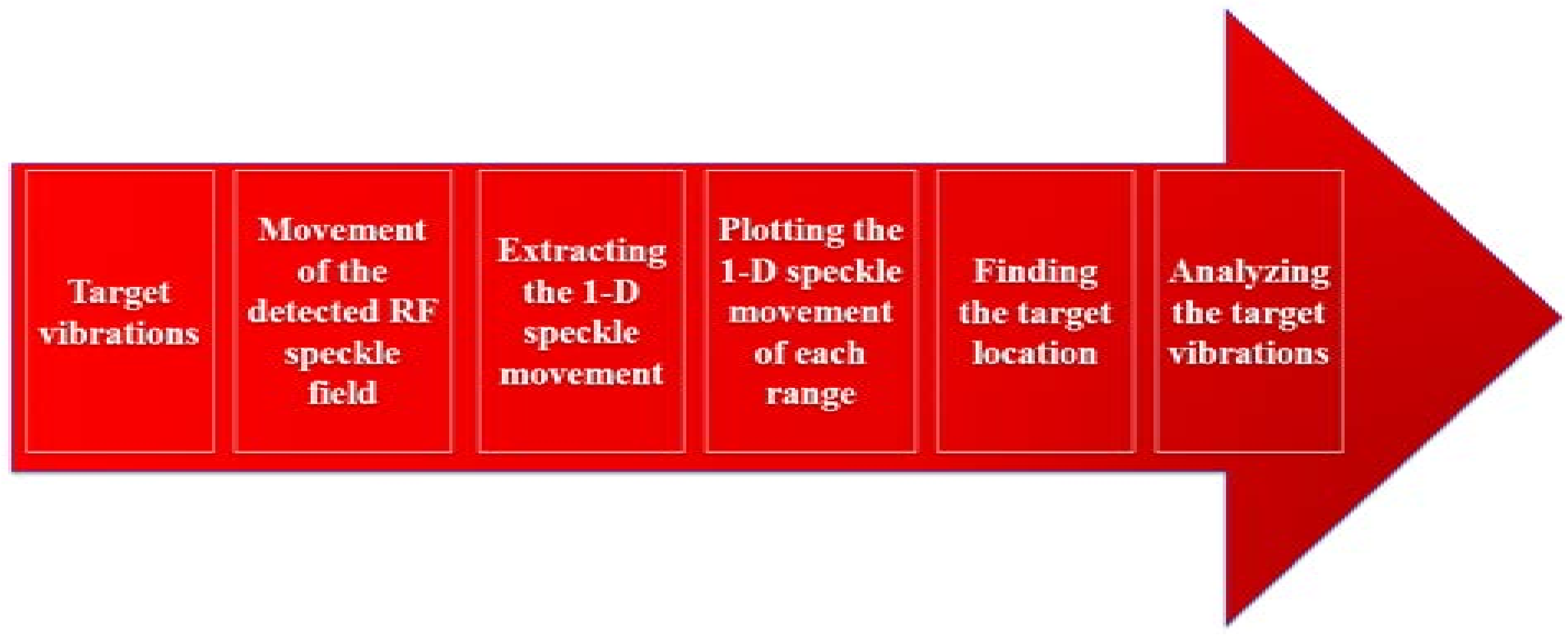
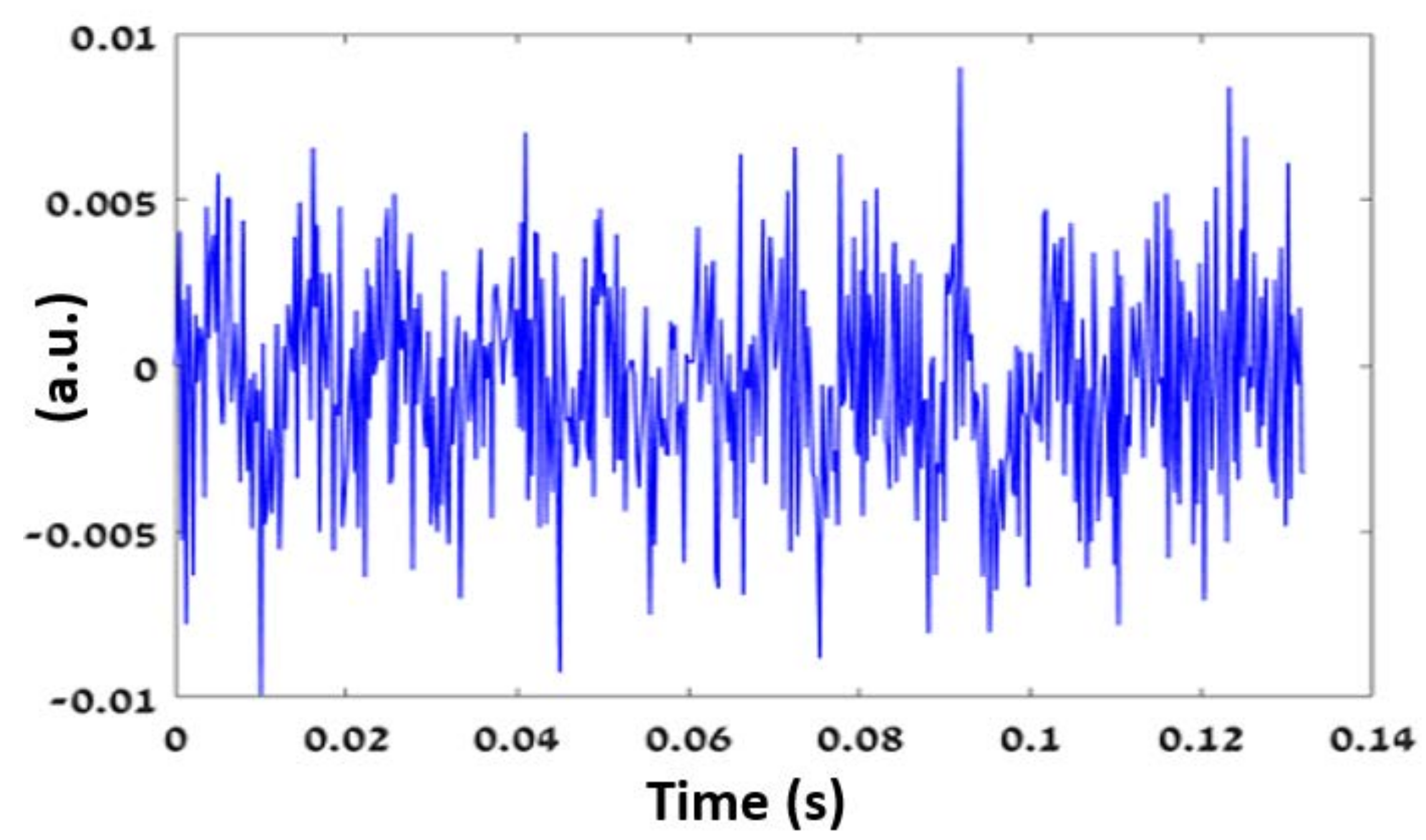
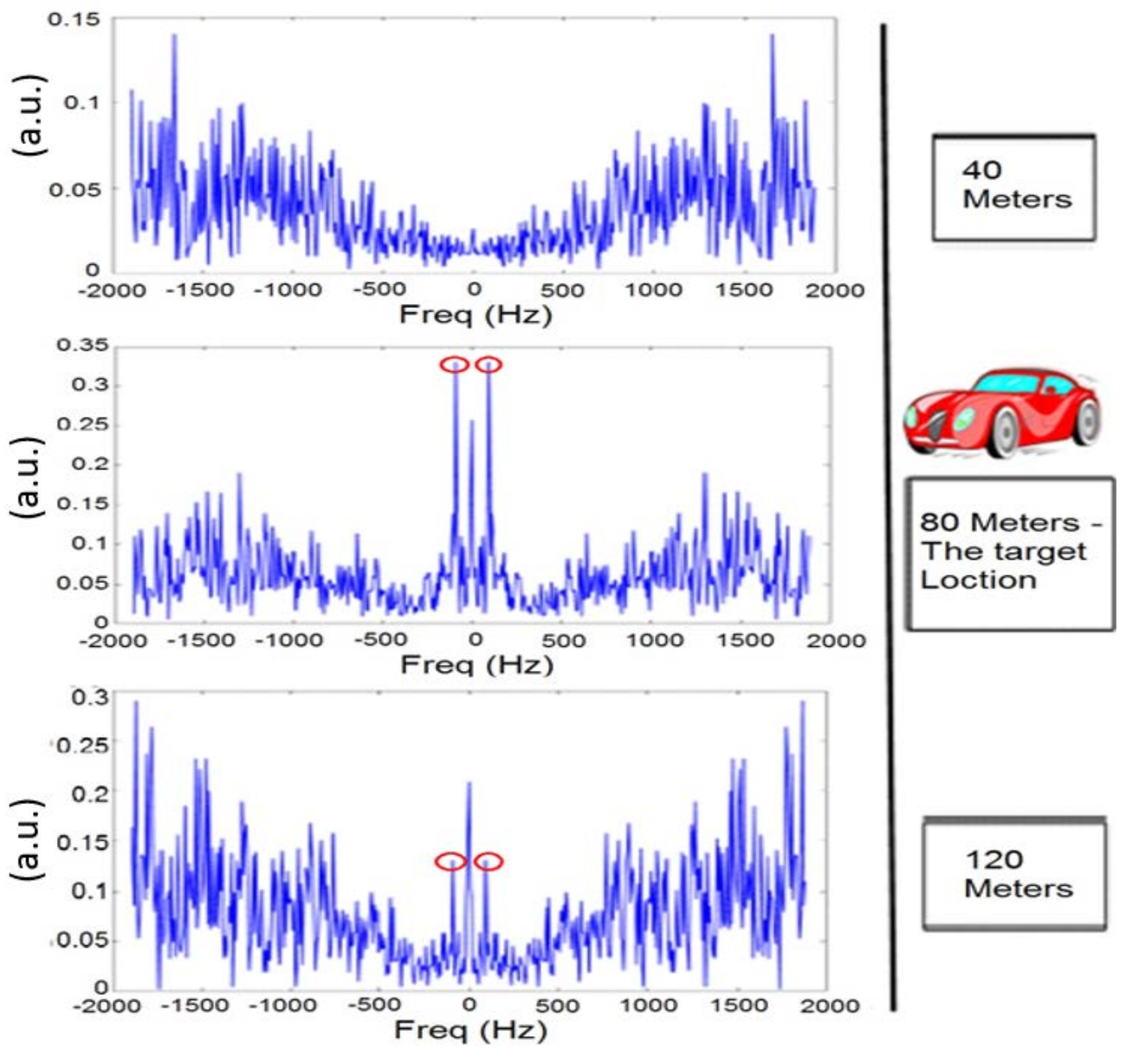
3.2. Remote Vibrations Monitoring Using RF Speckle
4. Discussion and Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zalevsky, Z.; Beiderman, Y.; Margalit, I.; Gingold, S.; Teicher, M.; Mico, V.; Garcia, J. Simultaneous remote extraction of multiple speech sources and heart beats from secondary speckles pattern. Opt. Express 2009, 17, 21566–21580. [Google Scholar] [CrossRef] [PubMed]
- Golberg, M.; Ruiz-Rivas, J.; Polani, S.; Beiderman, Y.; Zalevsky, Z. Large-scale clinical validation of noncontact and continuous extraction of blood pressure via multipoint defocused photonic imaging. Appl. Opt. 2018, 57, B45. [Google Scholar] [CrossRef] [PubMed]
- Ozana, N.; Margalith, I.; Beiderman, Y.; Kunin, M.; Campino, G.A.; Gerasi, R.; Garcia, J.; Mico, V.; Zalevsky, Z. Demonstration of a Remote Optical Measurement Configuration That Correlates With Breathing, Heart Rate, Pulse Pressure, Blood Coagulation, and Blood Oxygenation. Proc. IEEE 2015, 103, 248–262. [Google Scholar] [CrossRef]
- Beiderman, Y.; Horovitz, I.; Burshtein, N.; Teicher, M.; Garcia, J.; Mico, V.; Zalevsky, Z. Remote estimation of blood pulse pressure via temporal tracking of reflected secondary speckles pattern. J. Biomed. Opt. 2010, 15, 61707. [Google Scholar] [CrossRef] [PubMed]
- Bishitz, Y.; Ozana, N.; Beiderman, Y.; Tenner, F.; Schmidt, M.; Mico, V.; Garcia, J.; Zalevsky, Z. Noncontact optical sensor for bone fracture diagnostics. Biomed. Opt. Express 2015, 6, 651–657. [Google Scholar] [CrossRef] [PubMed]
- Ozana, N.; Bishitz, Y.; Beiderman, Y.; Garcia, J.; Zalevsky, Z.; Schwarz, A. Remote optical configuration of pigmented lesion detection and diagnosis of bone fractures. Int. Soc. Opt. Photonics 2016, 9689. [Google Scholar] [CrossRef]
- Ozana, N.; Arbel, N.; Beiderman, Y.; Mico, V.; Sanz, M.; Garcia, J.; Anand, A.; Javidi, B.; Epstein, Y.; Zalevsky, Z. Improved noncontact optical sensor for detection of glucose concentration and indication of dehydration level. Biomed. Opt. Express 2014, 5, 1926–1940. [Google Scholar] [CrossRef] [PubMed]
- Ozana, N.; Beiderman, Y.; Anand, A.; Javidi, B.; Polani, S.; Schwarz, A.; Shemer, A.; Garcia, J.; Zalevsky, Z. Noncontact speckle-based optical sensor for detection of glucose concentration using magneto-optic effect. J. Biomed. Opt. 2016, 21, 65001. [Google Scholar] [CrossRef] [PubMed]
- Ozana, N.; Buchsbaum, S.; Bishitz, Y.; Beiderman, Y.; Schmilovitch, Z.; Schwarz, A.; Shemer, A.; Keshet, J.; Zalevsky, Z. Optical remote sensor for peanut kernel abortion classification. Appl. Opt. 2016, 55, 4005. [Google Scholar] [CrossRef] [PubMed]
- Shenhav, A.; Brodie, Z.; Beiderman, Y.; Garcia, J.; Mico, V.; Zalevsky, Z. Optical sensor for remote estimation of alcohol concentration in blood stream. Opt. Commun. 2013, 289, 149–157. [Google Scholar] [CrossRef]
- Schwarz, A.; Shemer, A.; Ozana, N.; Garcia, J.; Zalevsky, Z. Augmentative Alternative Communication using Eyelid Movement Remote Detection by Speckle Patterns Tracking System for Amyotrophic Lateral Sclerosis Disease. In Optics in the Life Sciences Congress; OSA: Washington, DC, USA, 2017; p. JTu4A.31. [Google Scholar]
- Schwarz, A.; Shemer, A.; Ozana, N.; Califa, R.; García, J.; Zalevsky, Z. Laser Vibrometer Interferometry for Speckle Patterns Tracking Systems. In Conference on Lasers and Electro-Optics; OSA: Washington, DC, USA, 2017; p. JW2A.1. [Google Scholar]
- Schwarz, A.; Shemer, A.; Ozana, N.; Califa, R.; García, J.; Zalevsky, Z. An Optical Remote Sensor for Fingerprint Identification using Speckle Pattern. In Conference on Lasers and Electro-Optics; OSA: Washington, DC, USA, 2017; p. ATu3C.5. [Google Scholar]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005; ISBN 9781580530583. [Google Scholar]
- Kim, S.-D.; Ju, Y.; Lee, J.-H. Design and implementation of a full-digital pulse-Doppler radar system for automotive applications. In Proceedings of the 2011 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 9–12 January 2011; pp. 563–564. [Google Scholar]
- Proakis, J.G.; Manolakis, D.G. Digital Signal Processing: Principles, Algorithms, and Applications; Prentice Hall: Upper Saddle River, NJ, USA, 1996; ISBN 9780133737622. [Google Scholar]
- Khan, S.A. Digital Design of Signal Processing Systems: A Practical Approach; Wiley: Hoboken, NJ, USA, 2011; ISBN 9780470741832. [Google Scholar]
- Bala Bhanu, M.; Deepthi, P.; Rao, K.V.R. Simulation Analysis of Real-Time Signal Processor for Pulse Doppler Radar. Int. J. Sci. Technol. Res. 2013, 2, 236–239. [Google Scholar]
- Kajiwara, A. Stepped-FM Pulse Radar for Vehicular Collision Avoidance. Electron. Commun. Jpn. Part I Commun. 1999, 82, 1–7. [Google Scholar] [CrossRef]
- Andrew, G.A.A., Jr. Optimal Radar Doppler Processors; Naval Research Lab: Washington, DC, USA, 1974; Volume 86. [Google Scholar]



© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ozana, N.; Bauer, R.; Ashkenazy, K.; Sasson, N.; Schwarz, A.; Shemer, A.; Zalevsky, Z. Demonstration of a Speckle Based Sensing with Pulse-Doppler Radar for Vibration Detection. Sensors 2018, 18, 1409. https://doi.org/10.3390/s18051409
Ozana N, Bauer R, Ashkenazy K, Sasson N, Schwarz A, Shemer A, Zalevsky Z. Demonstration of a Speckle Based Sensing with Pulse-Doppler Radar for Vibration Detection. Sensors. 2018; 18(5):1409. https://doi.org/10.3390/s18051409
Chicago/Turabian StyleOzana, Nisan, Reuven Bauer, Koby Ashkenazy, Nissim Sasson, Ariel Schwarz, Amir Shemer, and Zeev Zalevsky. 2018. "Demonstration of a Speckle Based Sensing with Pulse-Doppler Radar for Vibration Detection" Sensors 18, no. 5: 1409. https://doi.org/10.3390/s18051409
APA StyleOzana, N., Bauer, R., Ashkenazy, K., Sasson, N., Schwarz, A., Shemer, A., & Zalevsky, Z. (2018). Demonstration of a Speckle Based Sensing with Pulse-Doppler Radar for Vibration Detection. Sensors, 18(5), 1409. https://doi.org/10.3390/s18051409