Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features †

Abstract
:1. Introduction
2. Seamless 3D SLAM Framework
2.1. Degeneracy Detection Algorithm
2.2. Compensation Method for Degenerate Rotation
2.3. Further Processes
3. Experiments
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Cho, H.G.; Yeon, S.; Choi, H.; Doh, N.L. 3D Pose Estimation with One Plane Correspondence using Kinect and IMU. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 1970–1975. [Google Scholar]
- Tardioli, D.; Villarroel, J. Odometry-less Localization in Tunnel-like Environments. In Proceedings of the 2014 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Espinho, Portugal, 14–15 May 2014; pp. 65–72. [Google Scholar]
- Johannsson, H.; Kaess, M.; Fallon, M.; Leonard, J.J. Temporally Scalable Visual SLAM using a Reduced Pose Graph. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 54–61. [Google Scholar]
- Rosell-Polo, J.R.; Gregorio, E.; Gené, J.; Llorens, J.; Torrent, X.; Arnó, J.; Escolà, A. Kinect v2 Sensor-Based Mobile Terrestrial Laser Scanner for Agricultural Outdoor Applications. IEEE/ASME Trans. Mechatron. 2017, 22, 2420–2427. [Google Scholar] [CrossRef]
- Aghili, F.; Su, C.Y. Robust Relative Navigation by Integration of ICP and Adaptive Kalman Filter Using Laser Scanner and IMU. IEEE/ASME Trans. Mechatron. 2016, 21, 2015–2026. [Google Scholar] [CrossRef]
- Panahandeh, G.; Jansson, M. Vision-Aided Inertial Navigation Based on Ground Plane Feature Detection. IEEE/ASME Trans. Mechatron. 2014, 19, 1206–1215. [Google Scholar]
- Aghili, F.; Salerno, A. Driftless 3D Attitude Determination and Positioning of Mobile Robots By Integration of IMU With Two RTK GPSs. IEEE/ASME Trans. Mechatron. 2013, 18, 21–31. [Google Scholar] [CrossRef]
- Raposo, C.; Lourenço, M.; Antunes, M.; Barreto, J.P. Plane-based Odometry using an RGB-D Camera. In Proceedings of the British Machine Vision Conference (BMVC 2013), Bristol, UK, 9–13 September 2013. [Google Scholar]
- Taguchi, Y.; Jian, Y.D.; Ramalingam, S.; Feng, C. Point-plane SLAM for Hand-held 3D Sensors. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5182–5189. [Google Scholar]
- Li, R.; Liu, Q.; Gui, J.; Gu, D.; Hu, H. A Novel RGB-D SLAM Algorithm Based on Points and Plane-Patches. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering (CASE), Fort Worth, TX, USA, 21–25 August 2016; pp. 1348–1353. [Google Scholar]
- Proença, P.F.; Gao, Y. Probabilistic Combination of Noisy Points and Planes for RGB-D Odometry. In Proceedings of the Towards Autonomous Robotic Systems 18th Annual Conference, Guildford, UK, 19–21 July 2017; pp. 340–350. [Google Scholar]
- Sun, Q.; Yuan, J.; Zhang, X.; Sun, F. RGB-D SLAM in Indoor Environments with STING-Based Plane Feature Extraction. IEEE/ASME Trans. Mechatron. 2017. [Google Scholar] [CrossRef]
- Ma, K.; Zhu, J.; Dodd, T.J.; Collins, R.; Anderson, S.R. Robot Mapping and Localisation for Feature Sparse Water Pipes Using Voids as Landmarks. In Proceedings of the 16th Annual Conference Towards Autonomous Robotic Systems, Liverpool, UK, 8–10 September 2015; pp. 161–166. [Google Scholar]
- Keivan, N.; Sibley, G. Online SLAM with Any-time Self-calibration and Automatic Change Detection. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5775–5782. [Google Scholar]
- Tribou, M.J.; Wang, D.W.; Waslander, S.L. Degenerate Motions in Multicamera Cluster SLAM with Non-Overlapping Fields of View. Image Vis. Comput. 2016, 50, 27–41. [Google Scholar] [CrossRef]
- Zhou, Y.; Yan, F.; Zhou, Z. Probabilistic Depth Map Model for Rotation-Only Camera Motion in Semi-Dense Monocular SLAM. In Proceedings of the 2016 International Conference on Virtual Reality and Visualization (ICVRV), Hangzhou, China, 24–26 September 2016; pp. 8–15. [Google Scholar]
- Pathak, K.; Birk, A.; Vaskevicius, N.; Poppinga, J. Fast Registration based on Noisy Planes with Unknown Correspondences for 3D Mapping. IEEE Trans. Robot. 2010, 26, 424–441. [Google Scholar] [CrossRef]
- Zhang, J.; Kaess, M.; Singh, S. On Degeneracy of Optimization-based State Estimation Problems. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 809–816. [Google Scholar]
- Rong, Z.; Michael, N. Detection and Prediction of Near-Term State Estimation Degradation via Online Nonlinear Observability Analysis. In Proceedings of the 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 23–27 October 2016; pp. 28–33. [Google Scholar]
- Choi, D.G.; Bok, Y.; Kim, J.S.; Kweon, I.S. Extrinsic Calibration of 2-D Lidars Using Two Orthogonal Planes. IEEE Trans. Robot. 2016, 32, 83–98. [Google Scholar] [CrossRef]
- Kang, J.; Doh, N.L. Full-DOF Calibration of a Rotating 2-D LIDAR With a Simple Plane Measurement. IEEE Trans. Robot. 2016, 32, 1245–1263. [Google Scholar] [CrossRef]
- Wiedemeyer, T. IAI Kinect2. 2014–2015. Available online: https://github.com/code-iai/iai_kinect2 (accessed on 12 January 2018).
- Yeon, S.; Jun, C.; Choi, H.; Kang, J.; Yun, Y.; Doh, N.L. Robust-PCA-based Hierarchical Plane Extraction for Application to Geometric 3D Indoor Mapping. Int. J. Ind. Robot 2014, 41, 203–212. [Google Scholar] [CrossRef]
- Yun, Y.; Yeon, S.; Jun, C.; Choi, H.; Kang, J.; Doh, N.L. RANSAC-based Data Association Algorithm for the application to 3D SLAM. In Proceedings of the Korea Robotics Society Annual Conference, Gangwon-do, Korea, 21–23 June 2012; pp. 109–111. [Google Scholar]
- Bosse, M.; Zlot, R. Place Recognition using Keypoint Voting in Large 3D Lidar Datasets. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 2677–2684. [Google Scholar]
- Zlot, R.; Bosse, M. Efficient Large-scale Three-dimensional Mobile Mapping for Underground Mines. J. Field Robot. 2014, 31, 758–779. [Google Scholar] [CrossRef]
- Fankhauser, P.; Bloesch, M.; Rodriguez, D.; Kaestner, R.; Hutter, M.; Siegwart, R. Kinect v2 for Mobile Robot Navigation: Evaluation and Modeling. In Proceedings of the 2015 International Conference on Advanced Robotics (ICAR), Istanbul, Turkey, 27–31 July 2015; pp. 388–394. [Google Scholar]
- Lee, K.; Ryu, S.H.; Yeon, S.; Cho, H.G.; Jun, C.; Kang, J.; Choi, H.; Hyeon, J.; Baek, I.; Jung, W.; et al. Accurate Continuous Sweeping Framework in Indoor Spaces With Backpack Sensor System for Applications to 3D Mapping. IEEE Robot. Autom. Lett. 2016, 1, 316–323. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
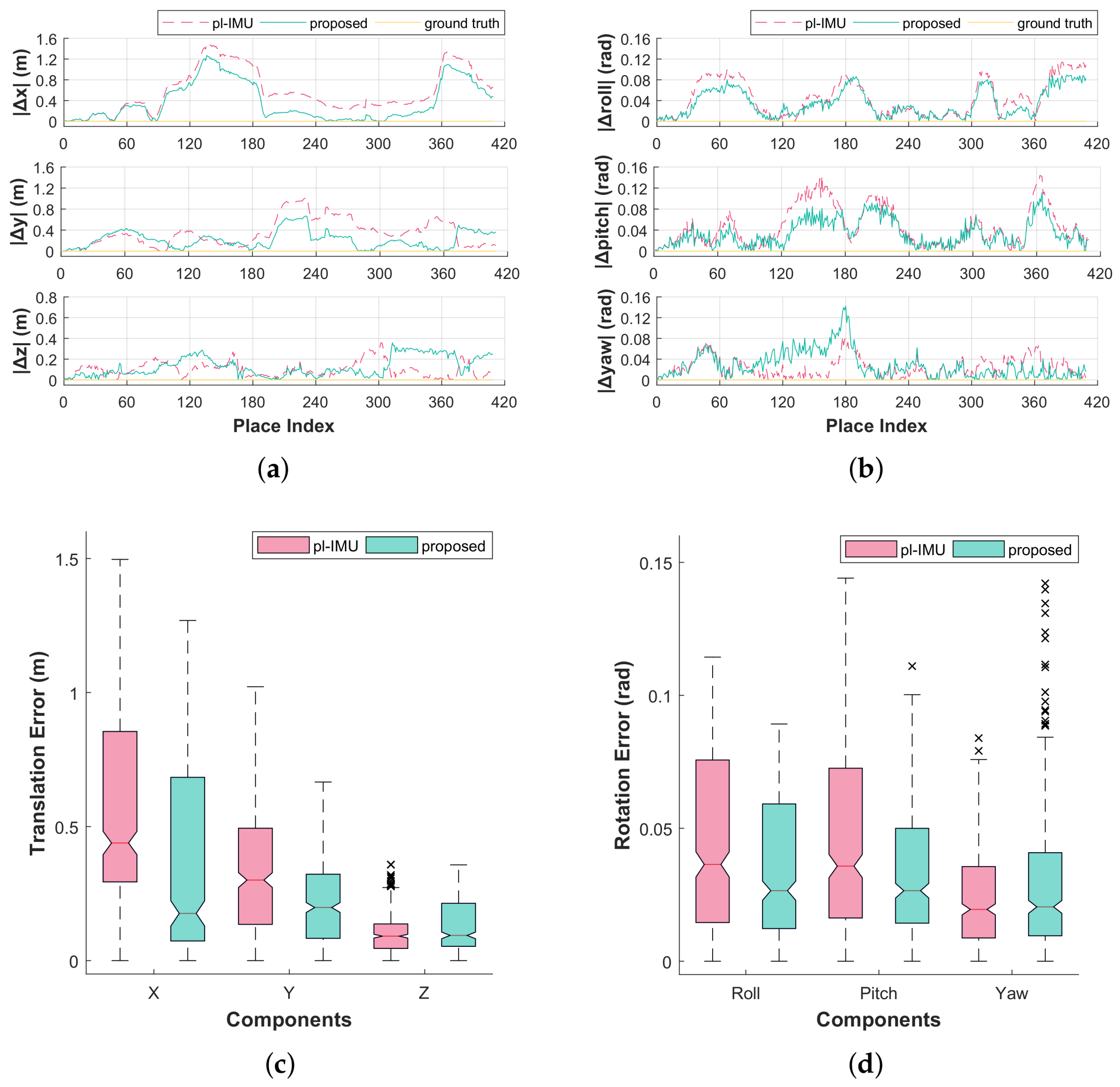
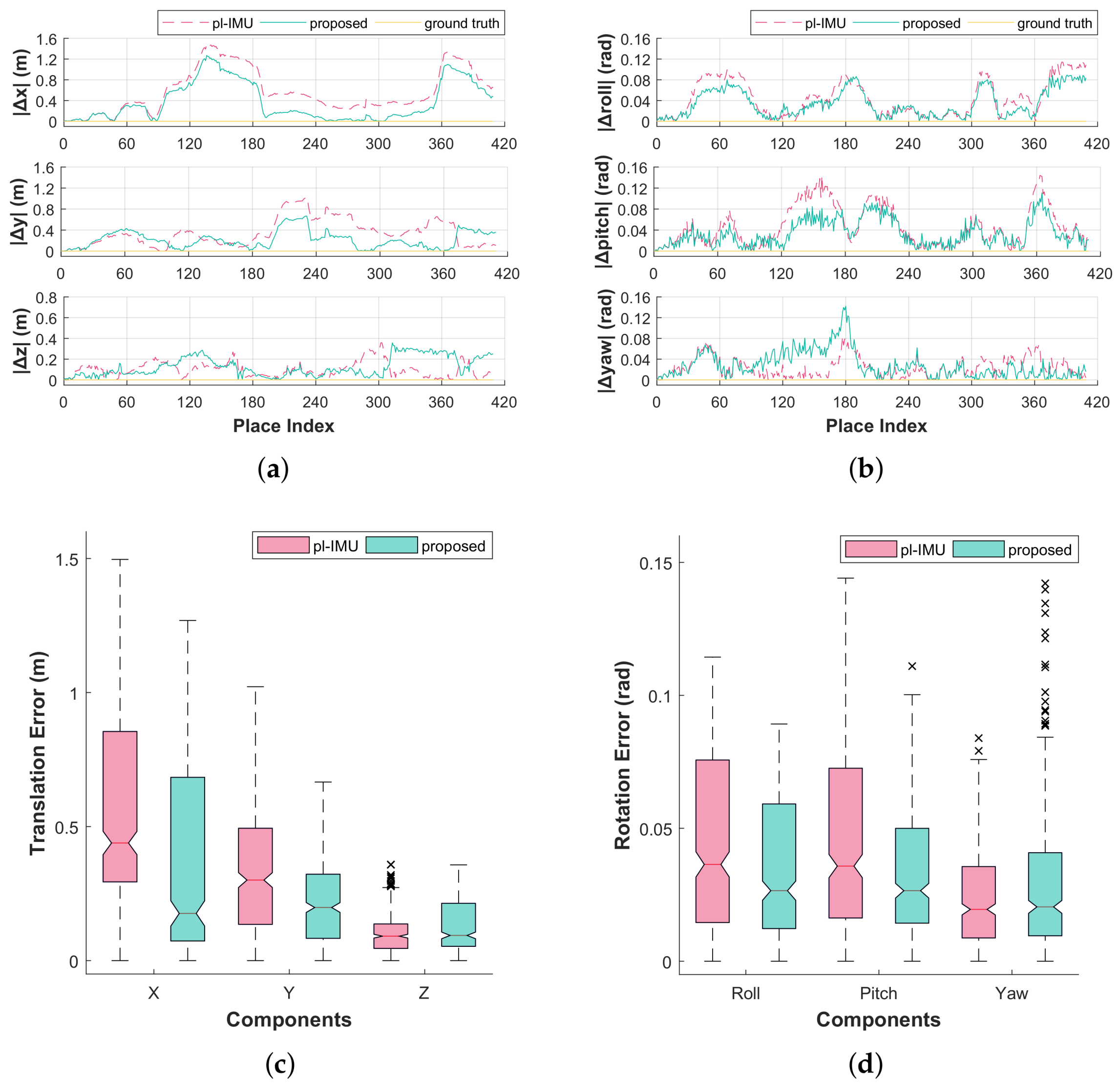
| Translation Error Avg. (m) | Rotation Error Avg. (rad) | |||||
|---|---|---|---|---|---|---|
| X | Y | Z | Roll | Pitch | Yaw | |
| pl-IMU | 0.5773 | 0.3466 | 0.1004 | 0.0445 | 0.0468 | 0.0241 |
| proposed | 0.3714 | 0.2164 | 0.1266 | 0.0347 | 0.0338 | 0.0286 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, H.; Yeon, S.; Choi, H.; Doh, N. Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features. Sensors 2018, 18, 935. https://doi.org/10.3390/s18040935
Cho H, Yeon S, Choi H, Doh N. Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features. Sensors. 2018; 18(4):935. https://doi.org/10.3390/s18040935
Chicago/Turabian StyleCho, HyunGi, Suyong Yeon, Hyunga Choi, and Nakju Doh. 2018. "Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features" Sensors 18, no. 4: 935. https://doi.org/10.3390/s18040935
APA StyleCho, H., Yeon, S., Choi, H., & Doh, N. (2018). Detection and Compensation of Degeneracy Cases for IMU-Kinect Integrated Continuous SLAM with Plane Features. Sensors, 18(4), 935. https://doi.org/10.3390/s18040935