Sensor Technologies for Intelligent Transportation Systems




Abstract
1. Introduction
Research Contributions of This Work
2. Sensor Technology
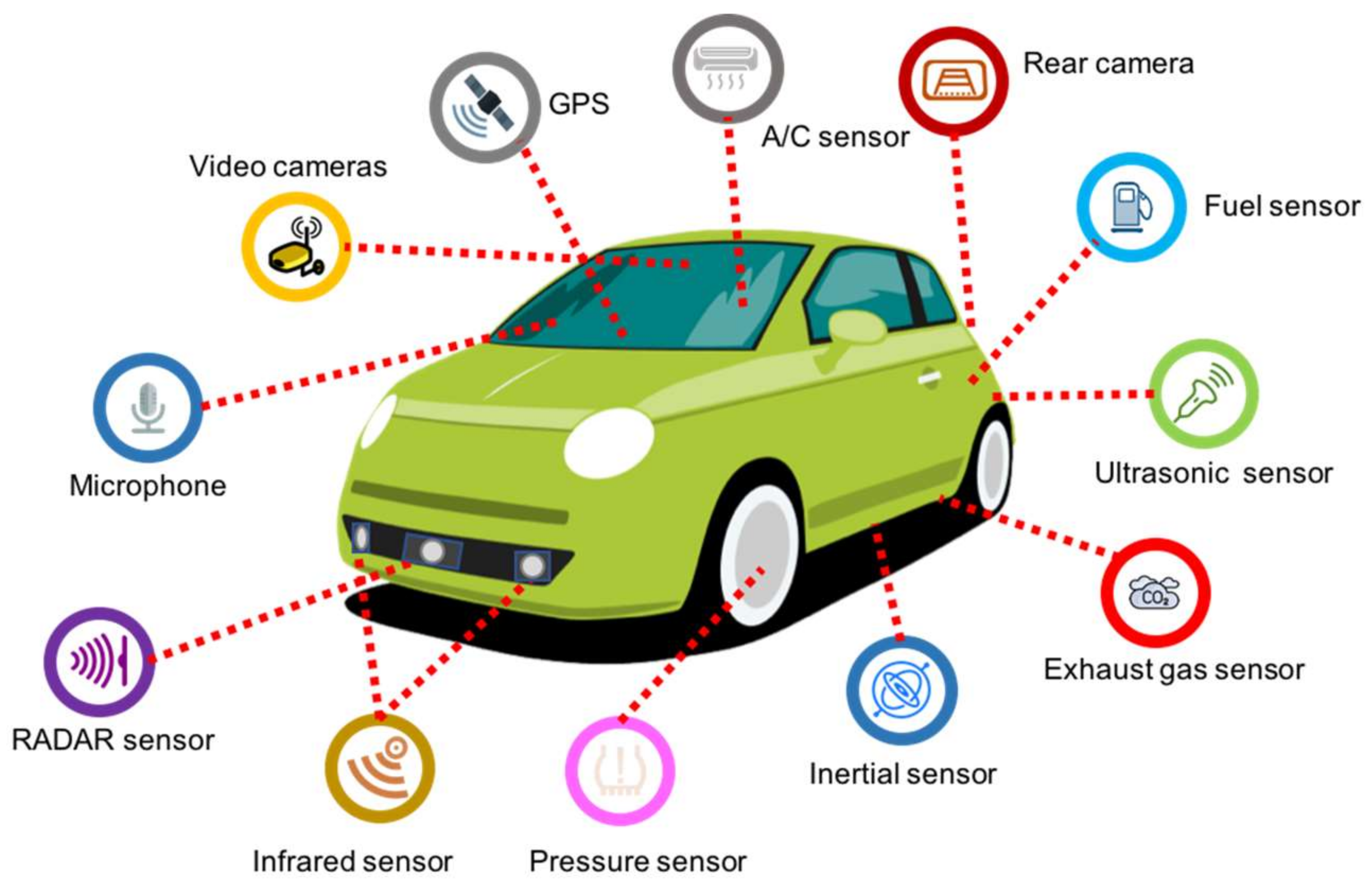
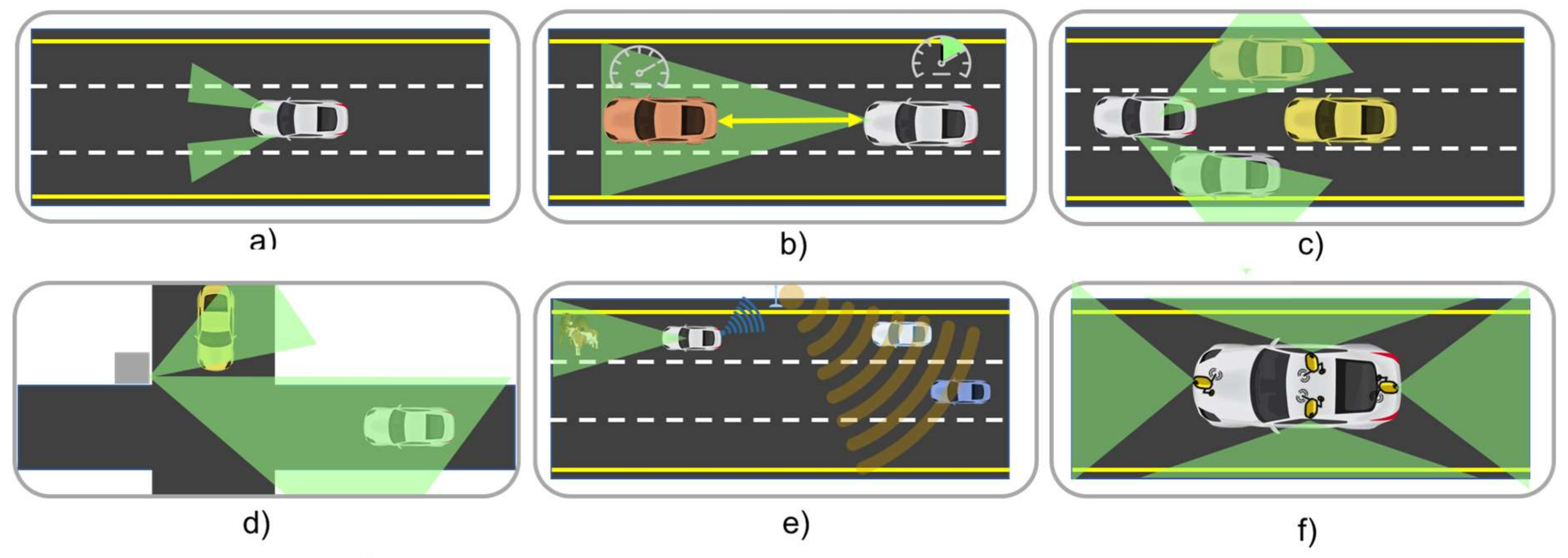
2.1. In-Vehicle Sensors
Applications for In-Vehicle Sensors
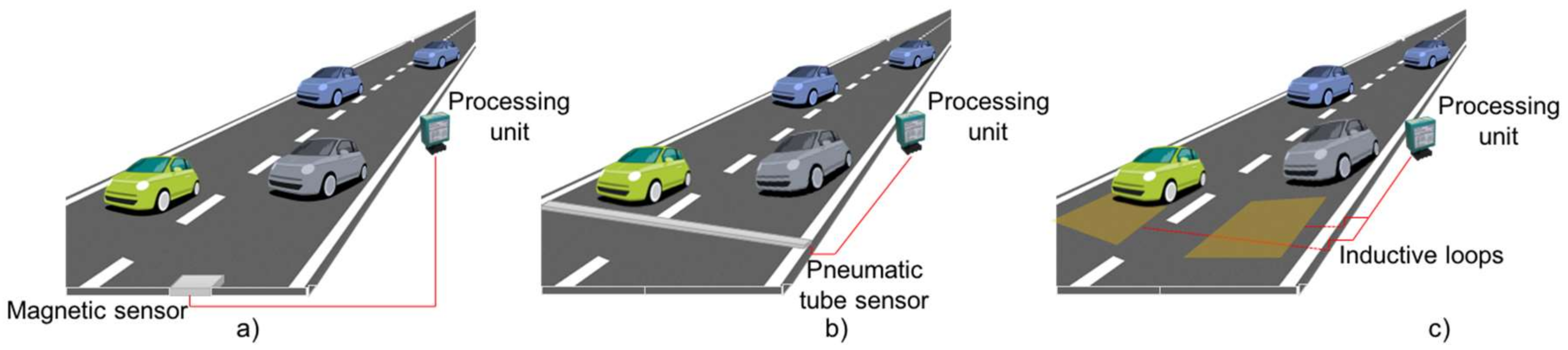
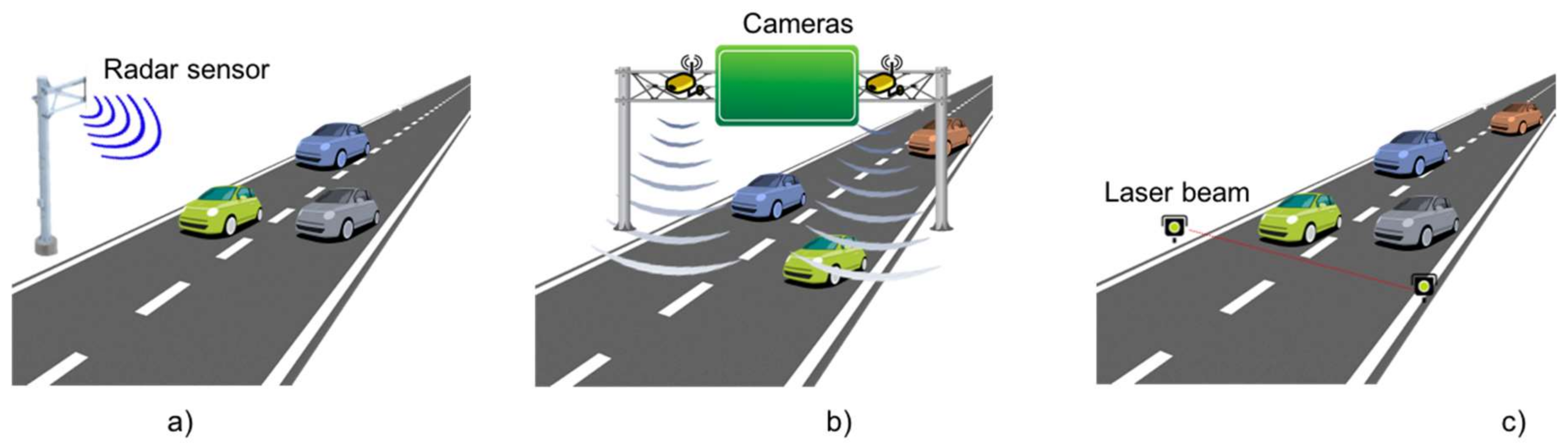
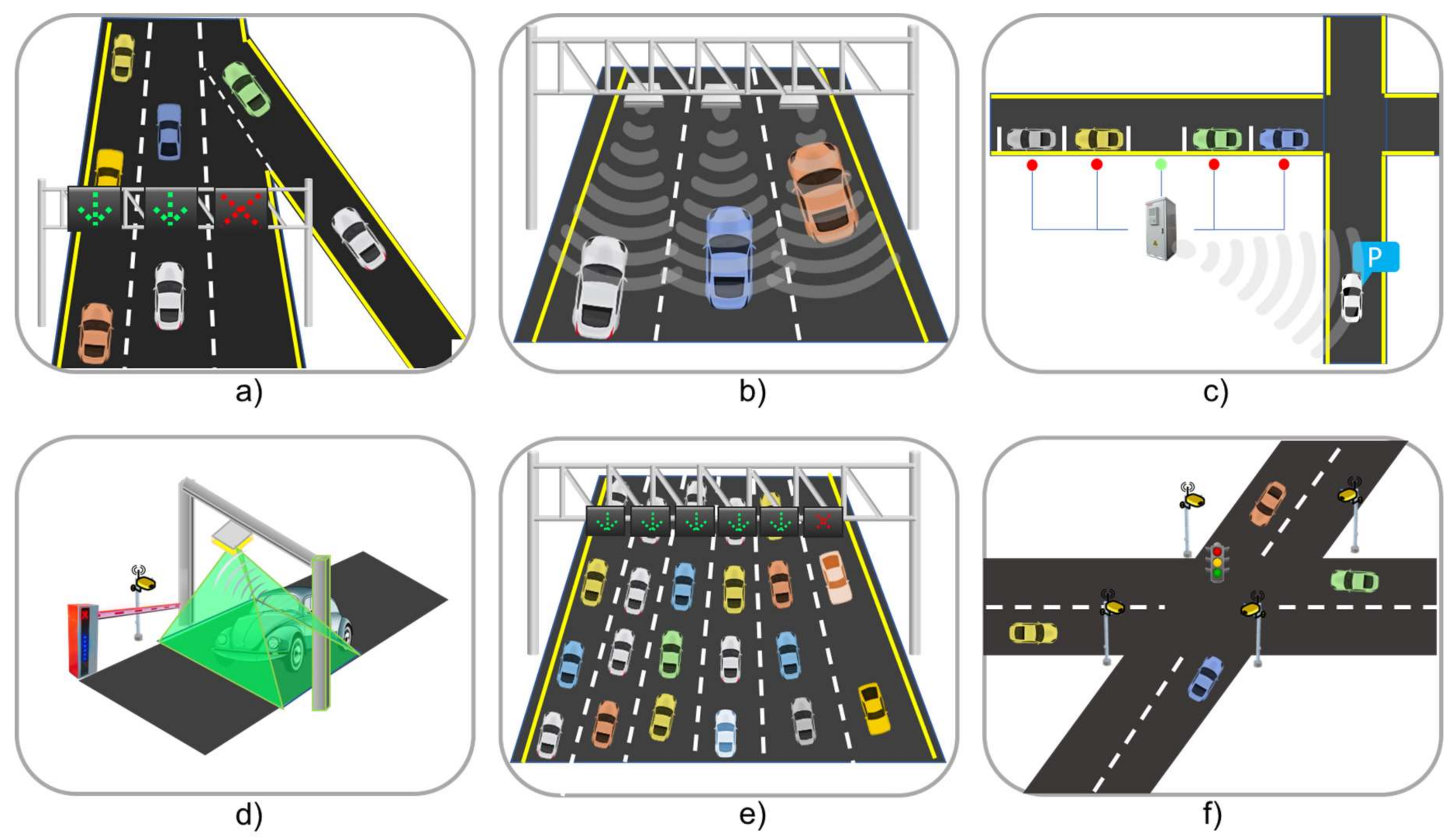
2.2. In Road Sensors
2.3. Discussion about Key Sensors
2.4. Interconnection Technologies for ITS
2.4.1. Access Technologies for V2V Communications
2.4.2. Access Technologies for V2I Communications
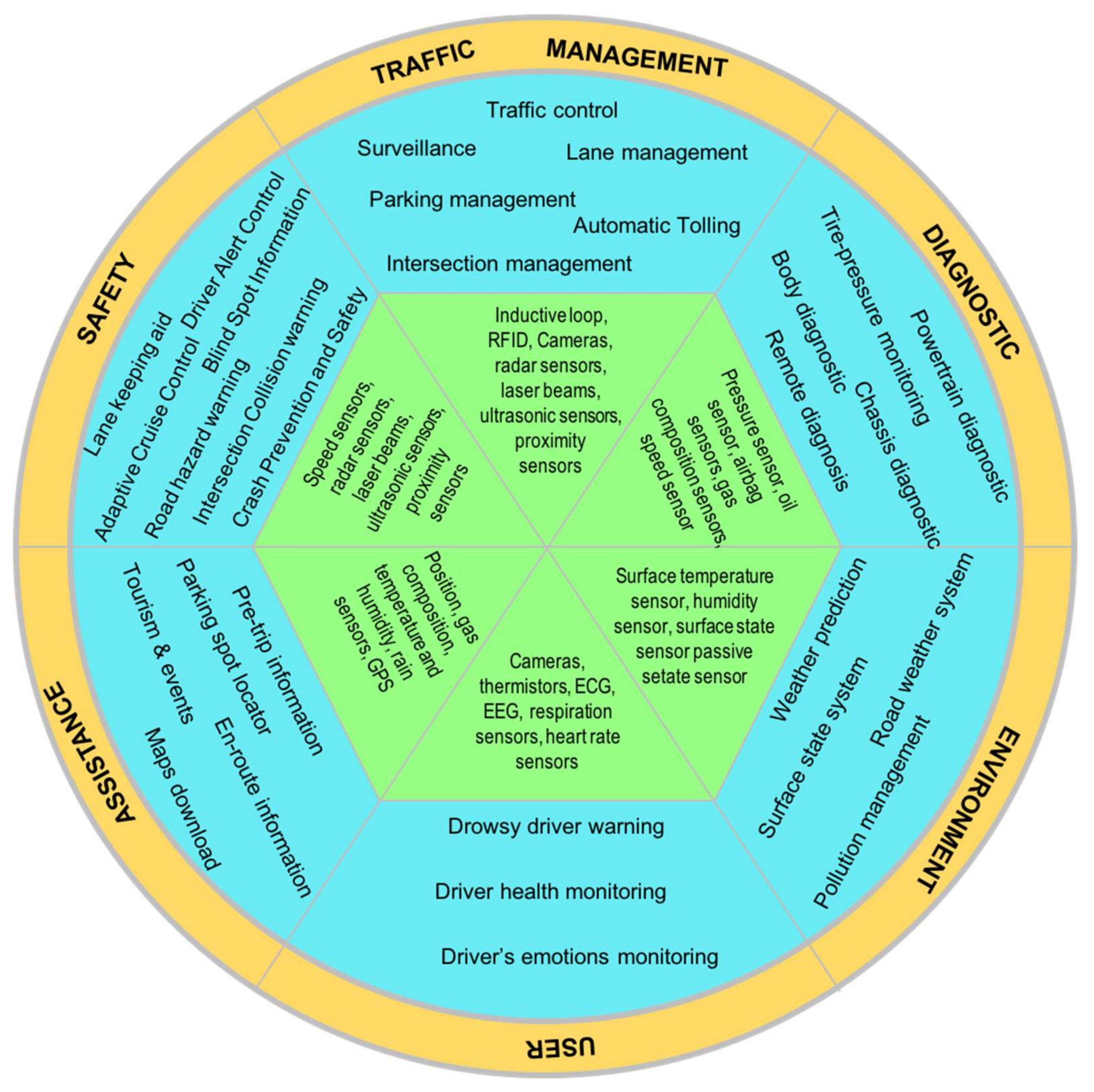
3. Taxonomy of ITS Applications
3.1. Safety Category
3.2. Traffic Management Category
3.3. Diagnostic Category
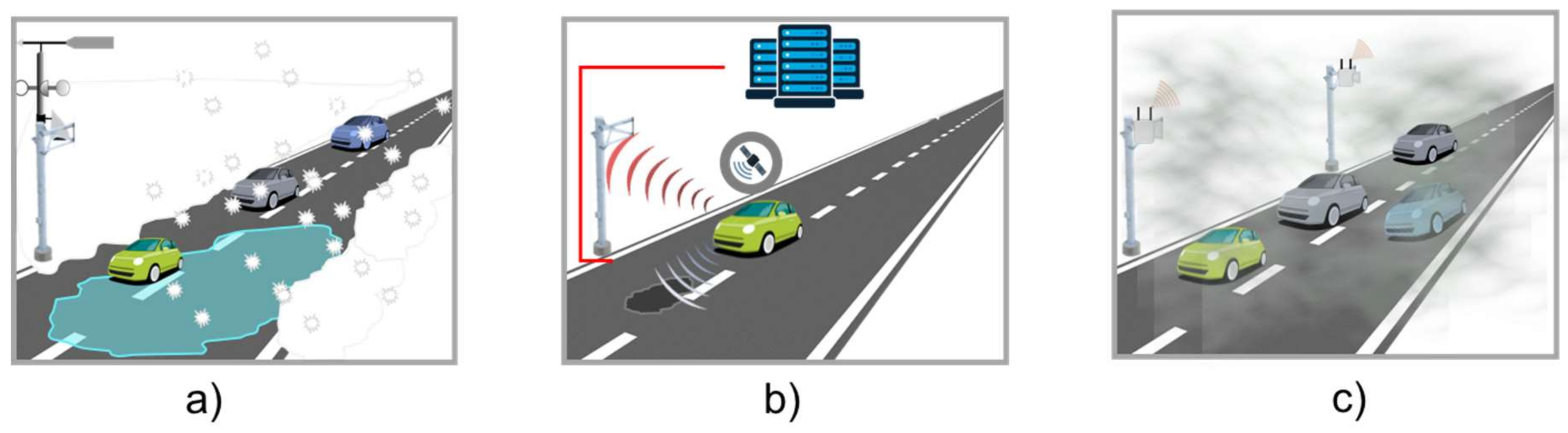
3.4. Environment Category
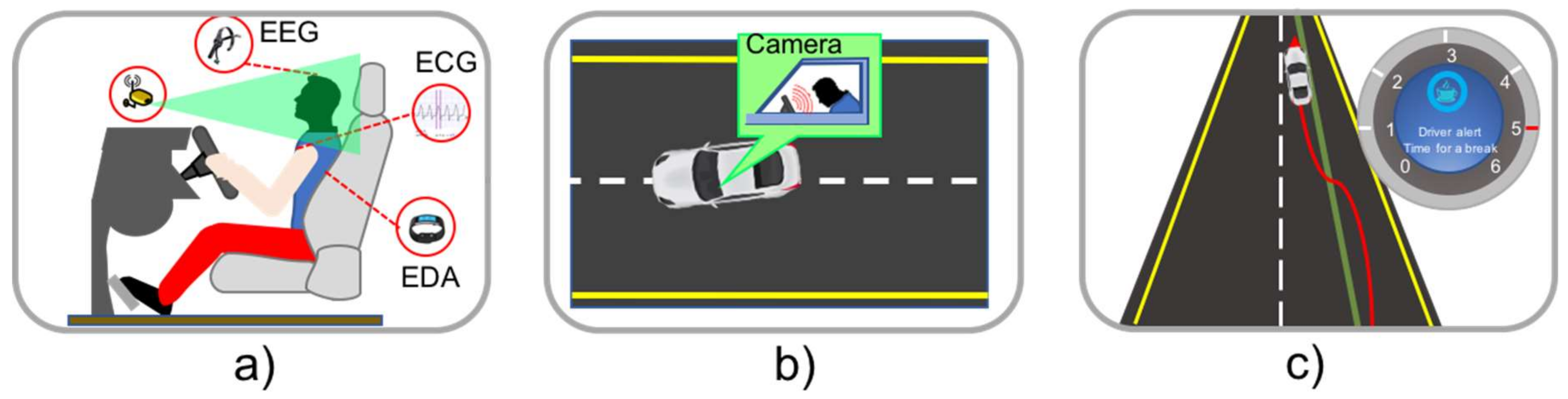
3.5. User Category
3.6. Assistance Category
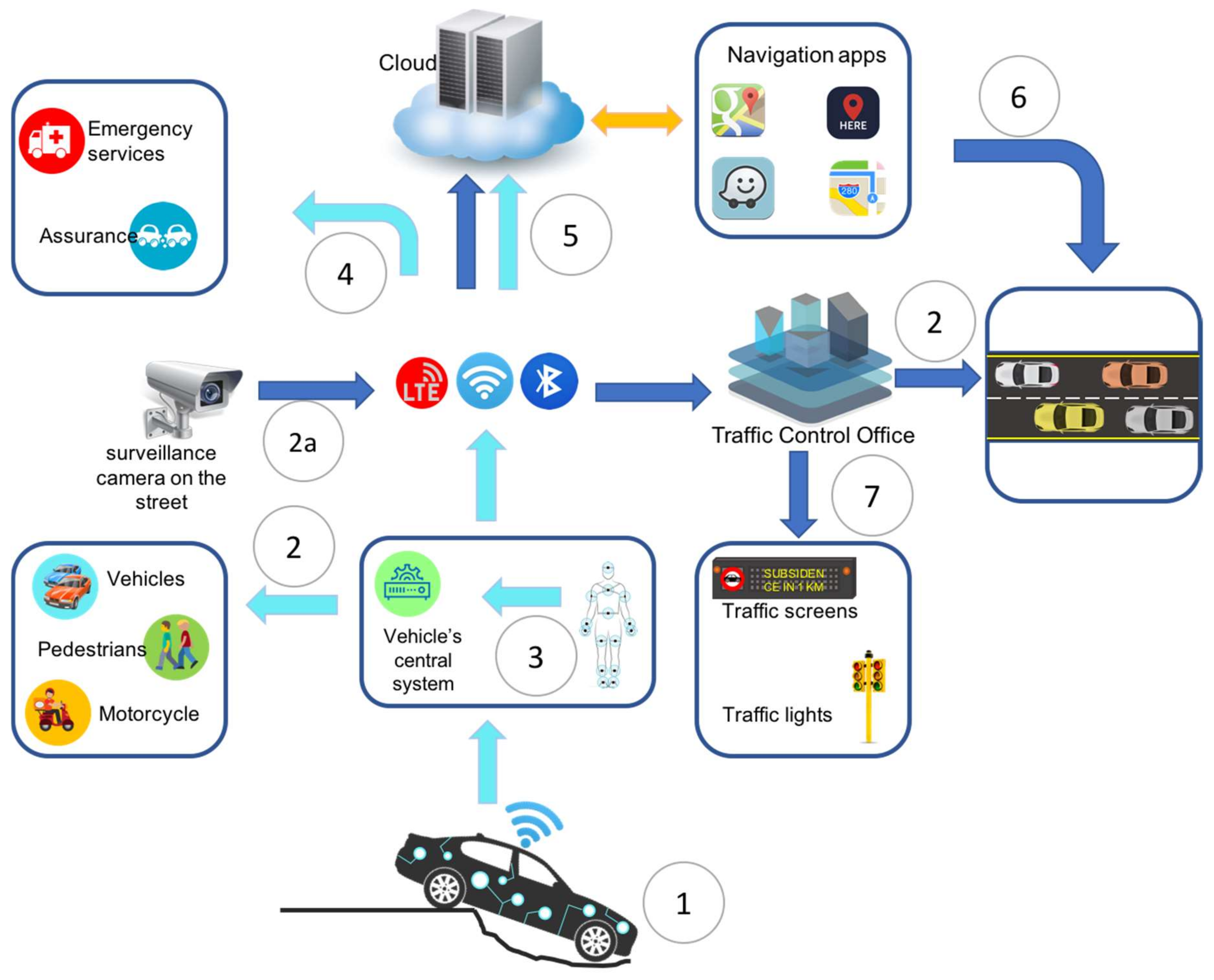
4. Case Study Scenario
5. Challenges and Opportunities
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Texas A&M Transportation Institute. Technical Report 2015 Urban Mobility Scorecard, INRIX. Available online: https://static.tti.tamu.edu/tti.tamu.edu/documents/mobility-scorecard-2015.pdf (accessed on 11 October 2017).
- United Nations Population Fund (UNFPA). State of World Population 2011: People and Possibilities in a World of 7 Billion; Technical Report; United Nations Population Fund: New York, NY, USA, 2011. [Google Scholar]
- Population Reference Bureau. 2016 World Population Datasheet, Inform Empower Advance. 2016. Available online: http://www.prb.org/pdf16/prb-wpds2016-web-2016.pdf (accessed on 11 October 2017).
- Guerrero-Ibáñez, J.A.; Zeadally, S.; Contreras-Castillo, J. Integration challenges of Intelligent Transportation Systems with Connected vehicle, cloud computing, and Internet of thing Technologies. IEEE Wirel. Commun. Mag. 2015, 22, 122–128. [Google Scholar] [CrossRef]
- Contreras, J.; Zeadally, S.; Guerrero-Ibanez, J.A. Internet of Vehicles: Architecture, Protocols, and Security. IEEE Internet Things J. 2017. [Google Scholar] [CrossRef]
- Guerrero-Ibáñez, J.A.; Flore-Cortés, C.; Zeadally, S. Vehicular ad Hoc Networks (VANETs): Architecture, Protocols and Applications. In Next-Generation Wireless Technologies 4G and Beyond, 1st ed.; Chilamkurti, N., Chaouchi, H., Zeadally, S., Eds.; Springer: London, UK, 2013; pp. 49–70. ISBN 978-1-4471-5163-0. [Google Scholar]
- Zhang, Y.; Sun, L.; Song, H.; Cao, X. Ubiquitous WSN for Healthcare: Recent Advances and Future Prospects. IEEE Internet Things J. 2014, 1, 311–318. [Google Scholar] [CrossRef]
- Alaiad, A.; Zhou, L. Patients’ Adoption of WSN-Based Smart Home Healthcare Systems: An Integrated Model of Facilitators and Barriers. IEEE Trans. Prof. Commun. 2017, 60, 4–23. [Google Scholar] [CrossRef]
- Bapat, V.; Kale, P.; Shinde, V.; Deshpande, N.; Shaligram, A. WSN application for crop protection to divert animal intrusions in the agricultural land. Comput. Electron. Agric. 2017, 133, 88–96. [Google Scholar] [CrossRef]
- Ojha, T.; Misra, S.; Raghuwanshi, N.S. Sensing-cloud: Leveraging the benefits for agricultural applications. Comput. Electron. Agric. 2017, 135, 96–107. [Google Scholar] [CrossRef]
- Khamukhin, A.A.; Bertoldo, S. Spectral Analysis of Forest Fire Noise for Early Detection using Wireless Sensor Networks. In Proceedings of the International Siberian Conference on Control and Communications (SIBCON), Moscow, Russia, 12–14 May 2016; pp. 1–4. [Google Scholar]
- Bolourchi, P.; Uysal, S. Forest Fire Detection in Wireless Sensor Network Using Fuzzy Logic. In Proceedings of the 2013 Fifth International Conference on Computational Intelligence, Communication Systems and Networks, Madrid, Spain, 5–7 June 2013; pp. 83–87. [Google Scholar]
- Guerrero Ibáñez, J.A.; Cosío-Leon, M.; Espinoza Ruiz, A.; Ruiz Ibarra, E.; Sanchez López, J.; Contreras-Castillo, J.; Nieto-Hipolito, J. GeoSoc: A Geocast-based Communication Protocol for Monitoring of Marine Environments. IEEE Latin Am. Trans. 2017, 15, 324–332. [Google Scholar] [CrossRef]
- Albaladejo Pérez, C.; Soto Valles, F.; Torres Sánchez, R.; Jiménez Buendía, M.; López-Castejón, F.; Gilabert Cervera, J. Design and Deployment of a Wireless Sensor Network for the Mar Menor Coastal Observation System. IEEE J. Ocean. Eng. 2017, 1–11. [Google Scholar] [CrossRef]
- USA Today. NHTSA to Require Backup Cameras on All Vehicles. Available online: https://www.usatoday.com/story/money/cars/2014/03/31/nhtsa-rear-view-cameras/7114531/ (accessed on 11 October 2017).
- Automotive Sensors and Electronics Expo. Available online: http://www.automotivesensors2017.com (accessed on 11 October 2017).
- Fleming, W.J. New automotive sensors—A review. IEEE Sens. J. 2008, 8, 1900–1921. [Google Scholar] [CrossRef]
- Abdelhamid, S.; Hassanein, H.S.; Takahara, G. Vehicle as a Mobile Sensor. Procedia Comput. Sci. 2014, 34, 286–295. [Google Scholar] [CrossRef]
- Department of Transportation, National Highway Traffic Safety Administration. Technical Report: Federal Motor Vehicle Safety Standards; Tire Pressure Monitoring Systems; Controls and Displays; 2007. Available online: https://www.nhtsa.gov/sites/nhtsa.dot.gov/files/fmvss/TPMSfinalrule.pdf (accessed on 14 March 2018).
- Ziraknejad, N.; Lawrence, P.D.; Romilly, D.P. Vehicle Occupant Head Position Quantification Using an Array of Capacitive Proximity Sensors. IEEE Trans. Veh. Technol. 2015, 64, 2274–2287. [Google Scholar] [CrossRef]
- Volvo Car. City Safety w/Collision Warning. Available online: http://volvo.custhelp.com/app/answers/detail/a_id/9766/~/city-safety-w%2Fcollision-warning (accessed on 27 March 2018).
- Business Roundtable. Road to Growth, the Case for Investing in America’s Transportation Infrastructure. 2015. Available online: http://businessroundtable.org/sites/default/files/2015.09.16%20Infrastructure%20Report%20-%20Final.pdf (accessed on 11 October 2017).
- European Environment Agency. Investment in Transport Infrastructure. Available online: https://www.eea.europa.eu/downloads/5a048b3109c14d6e9357c54ec4be6902/1480583876/assessment-3.pdf?direct=1 (accessed on 11 October 2017).
- Bargagli, B.; Manes, G.; Facchini, R.; Manes, A. Acoustic sensor network for vehicle traffic monitoring. In Proceedings of the First International Conference on Advances in Vehicular Systems, Technologies and Applications, Venice, Italy, 24–29 June 2012. [Google Scholar]
- Mathew, T.V. Transportation Systems Engineering. IIT Bombay. 2014. Available online: http://nptel.ac.in/downloads/105101008/ (accessed on 11 October 2017).
- Zhou, Y.; Dey, K.C.; Chowdhury, M.; Wang, K.C. Process for evaluating the data transfer performance of wireless traffic sensors for real-time intelligent transportation systems applications. IET Intell. Transp. Syst. 2017, 11, 18–27. [Google Scholar] [CrossRef]
- Ahmad, F.; Basit, A.; Ahmad, H.; Mahmud, S.A.; Khan, G.M.; Yousaf, F.Z. Feasibility of deploying wireless sensor based road side solutions for Intelligent Transportation Systems. In Proceedings of the 2013 International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 320–326. [Google Scholar]
- Geetha, S.; Cicilia, D. IoT enabled intelligent bus transportation system. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017; pp. 7–11. [Google Scholar]
- The Vehicle Detector Clearinghouse. A Summary of Vehicle Detection and Surveillance Technologies Used in Intelligent Transportation Systems. 2007. Available online: https://www.fhwa.dot.gov/policyinformation/pubs/vdstits2007/vdstits2007.pdf (accessed on 11 October 2017).
- Waymo. Waymo Project. Available online: http://www.waymo.com (accessed on 27 March 2018).
- Silva, C.; Masini, B.; Ferrari, G.; Thibault, I. A Survey on Infrastructure-Based Vehicular Networks. Mob. Inf. Syst. 2017, 2017, 28. [Google Scholar] [CrossRef]
- Omar, H.; Zhuang, W.; Li, L. VeMAC: A TDMA based MAC protocol for reliable broadcast in VANETs. IEEE Trans. Mob. Comput. 2012, 12, 1724–1736. [Google Scholar] [CrossRef]
- Bharati, S.; Zhuang, W. CAH-MAC: Cooperative ADHOC MAC for vehicular networks. IEEE J. Sel. Areas Commun. 2013, 13, 470–479. [Google Scholar] [CrossRef]
- Wu, X.; Subramanian, S.; Guha, R.; White, R.; Li, J.; Lu, K.; Zhang, T. Vehicular Communications Using DSRC: Challenges, Enhancements, and Evolution. IEEE J. Sel. Areas Commun. 2013, 31, 399–408. [Google Scholar]
- Wang, L.; Iida, R.F.; Wyglinski, A.M. Performance Analysis of EDCA for IEEE 802.11p/DSRC Based V2V Communication in Discrete Event System. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Dhanya, V.; Martin, R. An efficient computerized error control transceiver system for DSRC applications. In Proceedings of the 2017 International Conference on Signal Processing and Communication (ICSPC), Coimbatore, India, 28–29 July 2017; pp. 112–116. [Google Scholar]
- Gambhir, N.; Sharma, P. A hybrid approach for intelligent communication and performance analysis over DSRC VANET. In Proceedings of the 2017 International Conference on Information, Communication, Instrumentation and Control (ICICIC), Indore, India, 17–19 August 2017; pp. 1–5. [Google Scholar]
- Zhou, H.; Cheng, N.; Yu, Q.; Sherman Shen, X.; Shan, D.; Bai, F. Toward Multi-Radio Vehicular Data Piping for Dynamic DSRC/TVWS Spectrum Sharing. IEEE J. Sel. Areas Commun. 2016, 34, 2575–2588. [Google Scholar] [CrossRef]
- Ihara, Y.; Kremo, H.; Altintas, O.; Tanaka, H.; Ohtake, M.; Fujii, T.; Tsuru, M. Distributed autonomous multi-hop vehicle-to-vehicle communications over TV white space. In Proceedings of the IEEE Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 336–344. [Google Scholar]
- Wang, T.; Song, L.; Han, Z. Coalitional graph games for popular content distribution in cognitive radio VANETs. IEEE Trans. Veh. Technol. 2013, 62, 4010–4019. [Google Scholar] [CrossRef]
- Altintas, O.; Ihara, Y.; Kremo, H.; Tanaka, H.; Ohtake, M.; Fujii, T.; Yoshimura, Ch.; Ando, K.; Sukamoto, K.; Tsuru, M.; et al. Field tests and indoor emulation of distributed autonomous multi-hop vehicle-to-vehicle communications over TV white space. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2013, 16, 54–57. [Google Scholar] [CrossRef]
- Booysen, T.; Zeadally, S.; Rooyen, J. Survey of Media Access Control (MAC) Protocols for Vehicular Ad-Hoc NETworks (VANETs). IET Commun. J. 2011, 5, 1619–1631. [Google Scholar] [CrossRef]
- Khan, N.; Misic, J.; Misic, V. VM2M: An overlay network to support vehicular traffic over LTE. In Proceedings of the International Wireless Communications and Mobile Computing Conference, Paphos, Cyprus, 5–9 September 2016; pp. 13–18. [Google Scholar]
- Piro, G.; Orsino, A.; Campolo, C.; Araniti, G.; Boggia, G.; Molinaro, A. D2D in LTE vehicular networking: System model and upper bound performance. In Proceedings of the 7th International Congress on Ultra-Modern Telecommunications and Control Systems and Workshops (ICUMT), Brno, Czech Republic, 6–8 October 2015; pp. 281–286. [Google Scholar]
- Chaqfeh, M.; Lakas, A.; Jawhar, I. A survey on data dissemination on vehicular ad hoc networks. Veh. Commun. 2014, 1, 214–225. [Google Scholar] [CrossRef]
- Tiwari, P.; Kushwah, R. Traffic analysis for VANET using WAVE and WiMAX. In Proceedings of the International Conference on Communication Networks (ICCN), Gwalior, India, 19–21 November 2015; pp. 343–346. [Google Scholar]
- Hsu, Y.; Wang, K.; Tseng, Y. Efficient cooperative access class barring with load balancing and traffic adaptive radio resource management for M2M communications over LTE-A. Comput. Netw. 2014, 73, 268–281. [Google Scholar] [CrossRef]
- Doyle, N.; Jaber, N.; Tepe, K. Complete architecture and demonstration design for a new combined WiMAX/DSRC system with improved vehicular networking efficiency. Ad Hoc Netw. 2013, 11, 2026–2048. [Google Scholar] [CrossRef]
- Mitra, R.N.; Agrawal, D.P. 5G mobile technology: A survey. ICT Express 2015, 1, 132–137. [Google Scholar] [CrossRef]
- Mohseni-Ejiyeh, A.; Ashouri-Talouki, M. SeVR+: Secure and privacy-aware cloud-assisted video reporting service for 5G vehicular networks. In Proceedings of the Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; pp. 2159–2164. [Google Scholar]
- Schmidhammer, M.; Sand, S.; Soliman, M.; de Ponte Muller, F. 5G signal design for road surveillance. In Proceedings of the 2017 14th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2017; pp. 1–6. [Google Scholar]
- Sathishkumar, R.; Somasundaram, K.; Sherwin, M.; Mohnnish, D. Cloud based video reporting Service in 5G enabled smart transportation system in vehicular networks. In Proceedings of the 2017 IEEE International Conference on Electrical, Instrumentation and Communication Engineering (ICEICE), Karur, India, 27–28 April 2017; pp. 1–6. [Google Scholar]
- Khan, A.A.; Abolhasan, M.; Ni, W. 5G next generation VANETs using SDN and fog computing framework. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–6. [Google Scholar]
- SigFox, The Global Communication Service Provider for the Internet of Things. Available online: https://www.sigfox.com/en (accessed on 11 October 2017).
- Lauridsen, M.; Nguyen, H.; Vejlgaard, B.; Kovacs, I.Z.; Mogensen, P.; Sorensen, M. Coverage Comparison of GPRS, NB-IoT, LoRa, and SigFox in a 7800 km² Area. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovacs, I.Z.; Mogensen, P.; Sorensen, M. Coverage and Capacity Analysis of Sigfox, LoRa, GPRS, and NB-IoT. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Reyes, A.; Barrado, C.; Guerrero, A. Communication technologies to design vehicle-to-vehicle and vehicle-to-infrastructures applications. Latin Am. Appl. Res. 2016, 46, 29–35. [Google Scholar]
- Frenzel, L. The Battle over V2V Wireless Techologies. Available online: http://www.mwrf.com/systems/battle-over-v2v-wireless-technologies (accessed on 28 March 2018).
- Katzourakis, D.I.; Lazic, N.; Olsson, C.; Lidberg, M.R. Driver Steering Override for Lane-Keeping Aid Using Computer-Aided Engineering. IEEE/ASME Trans. Mechatron. 2015, 20, 1543–1552. [Google Scholar] [CrossRef]
- Lin, Y.; Nguyen, H.T.; Wang, C. Adaptive neuro-fuzzy predictive control for design of adaptive cruise control system. In Proceedings of the 2017 IEEE 14th International Conference on Networking, Sensing and Control (ICNSC), Calabria, Italy, 16–18 May 2017; pp. 767–772. [Google Scholar]
- Qin, Y.; Dong, M.; Zhao, F.; Langari, R.; Gu, L. Road profile classification for vehicle semi-active suspension system based on Adaptive Neuro-Fuzzy Inference System. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 14 December 2015; pp. 1533–1538. [Google Scholar]
- Shi, J.; Wu, J. Research on Adaptive Cruise Control based on curve radius prediction. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; pp. 180–184. [Google Scholar]
- Bulumulle, G.; Bölöni, L. A study of the automobile blind-spots’ spatial dimensions and angle of orientation on side-sweep accidents. In Proceedings of the 2016 Symposium on Theory of Modeling and Simulation (TMS-DEVS), Pasadena, CA, USA, 3–6 April 2016; pp. 1–6. [Google Scholar]
- Kim, S.; Kim, J.; Yi, K.; Jung, K. Detection and tracking of overtaking vehicle in Blind Spot area at night time. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 8–10 January 2017; pp. 47–48. [Google Scholar]
- Chen, L.; Tseng, Y.; Syue, K. Surveillance on-the-road: Vehicular tracking and reporting by V2V communications. Comput. Netw. 2014, 67, 154–163. [Google Scholar] [CrossRef]
- Mehrabi, A.; Kim, K. Using a mobile vehicle for road condition surveillance by energy harvesting sensor nodes. In Proceedings of the 2015 IEEE 40th Conference on Local Computer Networks (LCN), Clearwater Beach, FL, USA, 26–29 October 2015; pp. 189–192. [Google Scholar]
- Liu, K.; Son, S.H.; Lee, V.C.S.; Kapitanova, K. A token-based admission control and request scheduling in lane reservation systems. In Proceedings of the 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1489–1494. [Google Scholar]
- Tomas-Gabarron, J.; Egea-Lopez, E.; Garcia-Haro, J. Vehicular trajectory optimization for Cooperative Collision Avoidance at high speeds. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1930–1941. [Google Scholar] [CrossRef]
- Chen, L.; Englund, C. Cooperative Intersection Management: A Survey. IEEE Trans. Intell. Transport. Syst. 2016, 17, 570–586. [Google Scholar] [CrossRef]
- Nandhini, H.; Sunandha, C.P.; Yamura, S. Smart parking system and slot allocation with congestion avoidance technique. Int. J. Innov. Res. Sci. Eng. Technol. 2016, 5. [Google Scholar] [CrossRef]
- Gojak, V.; Janjatovic, J.; Vukota, N.; Milosevic, M.; Bjelica, M.Z. Informational bird’s eye view system for parking assistance. In Proceedings of the 2017 IEEE 7th International Conference on Consumer Electronics-Berlin (ICCE-Berlin), Berlin, Germany, 3–6 September 2017; pp. 103–104. [Google Scholar]
- Pu, L.; Liu, Z.; Meng, Z.; Yang, X.; Zhu, K.; Zhang, L. Implementing on-board diagnostic and GPS on VANET to safe the vehicle. In Proceedings of the 2015 International Conference on Connected Vehicles and Expo (ICCVE), Shenzhen, China, 19–23 October 2015; pp. 13–18. [Google Scholar]
- Yang, J.Y.; Chou, L.D.; Li, Y.C.; Lin, Y.H.; Huang, S.M.; Tseng, G.; Wang, T.W.; Lu, S.P. Prediction of short-term average vehicular velocity considering weather factors in urban VANET environments. In Proceedings of the 2010 International Conference on Machine Learning and Cybernetics, Qingdao, China, 11–14 July 2010; pp. 3039–3043. [Google Scholar]
- Doolan, R.; Muntean, G.M. EcoTrec—A Novel VANET-Based Approach to Reducing Vehicle Emissions. IEEE Trans. Intell. Transport. Syst. 2017, 18, 608–620. [Google Scholar] [CrossRef]
- Fedele, R.; Praticò, F.G.; Carotenuto, R.; Giuseppe Della Corte, F. Instrumented infrastructures for damage detection and management. In Proceedings of the 2017 5th IEEE International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Naples, Italy, 26–28 June 2017; pp. 526–531. [Google Scholar]
- Astarita, V.; Vaiana, R.; Iuele, T.; Caruso, M.V.; Vincenzo, P.; De Masi, F. Automated Sensing System for Monitoring of Road Surface Quality by Mobile Devices. Procedia Soc. Behav. Sci. 2014, 111, 242–251. [Google Scholar] [CrossRef]
- Tefft, B.C.; AAA Foundation for Traffic Safety. Prevalence of Motor Vehicle Crashes Involving Drowsy Drivers. Available online: https://newsroom.aaa.com/wp-content/uploads/2014/11/AAAFoundation-DrowsyDriving-Nov2014.pdf (accessed on 11 October 2017).
- World Health Organization. Global Status Report on Road Safety. Available online: http://www.who.int/ violence_injury_prevention/road_safety_status/2015/GSRRS2015_Summary_EN_final2.pdf?ua=1 (accessed on 11 October 2017).
- World Health Organization. Report on Road Traffic Injury Prevention. Available online: http://apps.who.int/iris/bitstream/10665/42871/1/9241562609.pdf (accessed on 13 January 2018).
- James, L.; Nahl, D. Road Rage and Aggressive Driving: Steering Clear of Highway Warfare; Prometheus Books: Amherst, NY, USA, 2000. [Google Scholar]
- Volvo. IntelliSafe System. Available online: https://www.volvocars.com/us/about/our-innovations/intellisafe (accessed on 30 March 2018).
- Hossan, A.; Kashem, F.B.; Hasan, M.M.; Naher, S.; Rahman, M.I. A smart system for driver’s fatigue detection, remote notification and semi-automatic parking of vehicles to prevent road accidents. In Proceedings of the 2016 International Conference on Medical Engineering, Health Informatics and Technology (MediTec), Dhaka, Bangladesh, 17–18 December 2016; pp. 1–6. [Google Scholar]
- Simon, M.; Schmidt, E.A.; Kincses, W.E.; Fritzsche, M.; Bruns, A.; Aufmuth, C.; Bogdan, M.; Rosenstiel, W.; Schrauf, M. EEG alpha spindle measures as indicators of driver fatigue under real traffic conditions. Clin. Neurophysiol. 2011, 122, 1168–1178. [Google Scholar] [CrossRef] [PubMed]
- Kong, W.; Lin, W.; Babiloni, F.; Hu, S.; Borghini, G. Investigating driver fatigue versus alertness using the granger causality network. Sensors 2015, 15, 19181–19198. [Google Scholar] [CrossRef] [PubMed]
- Singh, R.K.; Sarkar, A.; Anoop, C.S. A health monitoring system using multiple non-contact ECG sensors for automotive drivers. In Proceedings of the 2016 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Taipei, Taiwan, 23–26 May 2016; pp. 1–6. [Google Scholar]
- Fong, A.C.M.; Chan, C.; Situ, L.; Fong, B. Wireless biosensing network for drivers’ health monitoring. In Proceedings of the 2016 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 9–11 January 2016; pp. 247–248. [Google Scholar]
- Gruhn, H.; Stöhr, D.; Gövercin, M.; Glesner, S. Design and verification of a health-monitoring driver assistance system. In Proceedings of the 2013 7th International Conference on Pervasive Computing Technologies for Healthcare and Workshops, Venice, Italy, 5–8 May 2013; pp. 266–267. [Google Scholar]
- Rigas, G.; Goletsis, Y.; Fotiadis, D.I. Real-time driver’s stress event detection. IEEE Trans. Intell. Transport. Syst. 2012, 13, 221–234. [Google Scholar] [CrossRef]
- Rebolledo-Mendez, G.; Reyes, A.; Paszkowicz, S.; Domingo, M.C.; Skrypchuk, L. Developing a Body Sensor Network to Detect Emotions during Driving. IEEE Trans. Intell. Transport. Syst. 2014, 15, 1850–1854. [Google Scholar] [CrossRef]
- Reyes-Muñoz, A.; Domingo, M.C.; López-Trinidad, M.A.; Delgado, J.L. Integration of Body Sensor Networks and Vehicular Ad-hoc Networks for Traffic Safety. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Katsis, C.D.; Katertsidis, N.; Ganiatsas, G.; Fotiadis, D.E. toward Emotion Recognition in Car-Racing Drivers: A biosignal Processing Approach. IEEE Trans. Syst. Man Cybern. Part A Syst. Hum. 2008, 38, 502–512. [Google Scholar] [CrossRef]
- Lanatà, A.; Valenza, G.; Greco, A.; Gentili, C.; Bartolozzi, R.; Bucchi, F.; Frendo, F.; Scilingo, E.P. How the Autonomic Nervous System and Driving Style Change with Incremental Stressing Conditions During Simulated Driving. IEEE Trans. Intell. Transport. Syst. 2015, 16, 1505–1517. [Google Scholar] [CrossRef]
- Cai, H.; Lin, Y. Modelling of Operators’ Emotion and Task Performance in a Virtual Driving Environment. Int. J. Hum. Comput. Stud. 2011, 9, 571–587. [Google Scholar] [CrossRef]
- Deng, Y.; Hsu, D.F.; Wu, Z.; Chu, C.H. Feature Selection and Combination for Stress Identification Using Correlation and Diversity. In Proceedings of the 12th International Symposium on Pervasive Systems, Algorithms and Networks, San Marcos, TX, USA, 13–15 December 2012; pp. 37–43. [Google Scholar]
- Safi, Q.K.; Luo, S.; Wei, C.; Pan, L.; Chen, Q. PIaaS: Cloud-oriented secure and privacy-conscious parking information as a service using VANETs. Comput. Netw. 2017, 124, 33–45. [Google Scholar] [CrossRef]
- Jermsurawong, J.; Ahsan, M.U.; Haidar, A.; Dong, H.; Mavridis, N. Car Parking Vacancy Detection and Its Application in 24-Hour Statistical Analysis. In Proceedings of the 2012 10th International Conference on Frontiers of Information Technology, Islamabad, Pakistan, 17–19 December 2012; pp. 84–90. [Google Scholar]
- Alam, M.; Fernandes, B.; Almeida, J.; Ferreira, J.; Fonseca, J. Integration of smart parking in distributed ITS architecture. In Proceedings of the 2016 International Conference on Open Source Systems & Technologies (ICOSST), Lahore, Pakistan, 15–17 December 2016; pp. 84–88. [Google Scholar] [CrossRef]
- El Faouzi, N.; Klein, L.A. Data Fusion for ITS: Techniques and Research Needs. Transport. Res. Procedia 2016, 15, 495–512. [Google Scholar] [CrossRef]
- Durrant-Whyte, H.F. Sensor models and multisensor integration. Int. J. Robot. Res. 1988, 7, 97–113. [Google Scholar] [CrossRef]
- Dasarathy, B.V. Sensor fusion potential exploitation-innovative architectures and illustrative applications. Proc. IEEE 1997, 85, 24–38. [Google Scholar] [CrossRef]
- Castanedo, F. A review of data fusion techniques. Sci. World J. 2013, 2013, 1–19. [Google Scholar] [CrossRef] [PubMed]
- Durrant-Whyte, H.F.; Stevens, M. Data fusion in decentralized sensing networks. In Proceedings of the 4th International Conference on Information Fusion, Montreal, QC, Canada, 7–10 August 2001; pp. 302–307. [Google Scholar]
- Manyika, J.; Durrant-Whyte, H. Data Fusion and Sensor Management: A Decentralized Information-Theoretic Approach; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Luo, R.C.; Yih, C.-C.; Su, K.L. Multisensor fusion and integration: Approaches, applications, and future research directions. IEEE Sens. J. 2002, 2, 107–119. [Google Scholar] [CrossRef]
- Kyriakou, C.; Christodoulou, S.E.; Dimitriou, L. Roadway pavement anomaly classification utilizing smartphones and artificial intelligence. In Proceedings of the 2016 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar]
- Zhang, J.; Wang, F.; Wang, K.; Lin, W.; Xu, X.; Chen, C. Data-Driven Intelligent Transportation System: A survey. IEEE Trans. Intell. Transport. Syst. 2011, 12, 1624–1639. [Google Scholar] [CrossRef]
- Ang, L.; Seng, K. Big Sensor Data Applications in Urban Environments. Big Data Res. 2016, 4, 1–12. [Google Scholar] [CrossRef]
- Haluzová, P. Effective data mining for a transportation information system. Acta Polytech. 2008, 48, 24–29. [Google Scholar]
- Wu, X.; Zhu, X. Mining with noise knowledge: Error-aware data mining. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 2008, 38, 917–932. [Google Scholar] [CrossRef]
- Qu, L.; Li, L.; Zhang, Y.; Hu, J. PPCA-based missing data imputation for traffic flow volume: A systematical approach. IEEE Trans. Intell. Transp. Syst. 2009, 10, 512–522. [Google Scholar]
- Qi, G.-J.; Tang, J.; Zha, Z.-J.; Chua, T.-S.; Zhang, H.-J. An efficient sparse metric learning in high-dimensional space via l1-penalized log determinant regularization. In Proceedings of the International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 841–848. [Google Scholar]
- Huang, J.; Zhang, T.; Metaxas, D. Learning with structured sparsity. In Proceedings of the International Conference on Machine Learning, Montreal, QC, Canada, 14–18 June 2009; pp. 417–424. [Google Scholar]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2010, 20, 1345–1359. [Google Scholar] [CrossRef]
- Luo, F.; Zhao, Y.; Yuan, Z. Fast and accurate vehicle detection by aspect ratio regression. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 1169–1174. [Google Scholar]
- Tang, T.; Lin, Z.; Zhang, Y. Rapid Forward Vehicle Detection Based on Deformable Part Model. In Proceedings of the 2017 2nd International Conference on Multimedia and Image Processing (ICMIP), Wuhan, China, 17–19 March 2017; pp. 27–31. [Google Scholar] [CrossRef]
- Lai, Y.K.; Chou, Y.H.; Schumann, T. Vehicle detection for forward collision warning system based on a cascade classifier using adaboost algorithm. In Proceedings of the 2017 IEEE 7th International Conference on Consumer Electronics (ICCE), Berlin, Germany, 3–6 September 2017; pp. 47–48. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category of Sensors | Description | Example |
|---|---|---|
| Safety | Form the basis of safety systems and focus on recognizing accident hazards and events almost in real-time. | Micro-mechanical oscillators, speed sensors, cameras, radars and laser beams, inertial sensors, ultrasonic sensors, proximity sensors, night vision sensors, haptic. |
| Diagnostic | Focus on gathering data for providing real-time information about status and performance of the vehicle for detecting any malfunction of the vehicle. | Position sensor, chemical sensors, temperature sensors, gas composition sensors, pressure sensor, airbag sensor. |
| Traffic | Monitor the traffic conditions in specific zones, gathering data that improves the traffic management. | Cameras, radars, ultrasonic, proximity. |
| Assistance | Responsible for gathering data that provide support for comfort and convenience applications. | Gas composition sensor, humidity sensors, temperature sensors, position sensors, torque sensors, image sensors, rain sensors, fogging prevention sensors, distance sensors. |
| Environment | Monitor the environment conditions, offering drivers and passengers alert and warning services that are used to enhance their trips. | Pressure sensors, temperature sensors, distance sensors, cameras, weather conditions. |
| User | Focus on gathering data that support the detection of abnormal health conditions and behavior of the driver that can deteriorate the driver’s performance. | Cameras, thermistors, Electrocardiogram (ECG) sensors, Electroencephalogram (EEG). sensors, heart rate sensor. |
| Category | Sensor Type | Application and Use |
|---|---|---|
| Intrusive | Pneumatic road tube. | Used for keeping track of the number of vehicles, vehicle classification and vehicle count. |
| Inductive Loop Detector (ILD). | Used for detection vehicle’s movement, presence, count and occupancy. The signals generated are recorded in a device at the roadside. | |
| Magnetic sensors. | Used for detection of presence of vehicle, identifying stopped and moving vehicles. | |
| Piezoelectric. | Classification of vehicles, count vehicles and measuring vehicle’s weight and speed. | |
| Non-intrusive | Video cameras. | Detection of vehicles across several lanes and can classify vehicles by their length and report vehicle presence, flow rate, occupancy, and speed for each class. |
| Radar sensors. | Vehicular volume and speed measurement, detection of direction of motion of vehicle and used by applications for managing traffic lights. | |
| Infrared. | Application for speed measurement, vehicle length, volume, and lane occupancy. | |
| Ultrasonic. | Tracking the number of vehicles, vehicle’s presence, and occupancy. | |
| Acoustic array sensors | Used in the development of applications for measuring vehicle’s passage, presence, and speed. | |
| Road surface condition sensors | Used to collect information on weather conditions such as the surface temperature, dew point, water film height, the road conditions and grip. | |
| RFID (Radio-frequency identification) | Used to track vehicles mainly for toll management. |
| Data Rate | Application Domain | Protocols and Communication Networks |
|---|---|---|
| Less than 10 Kb/s | Control data used for driving and passenger monitoring. | Local Interconnect Network (LIN), Time-Triggered Light Weight Protocol (TTP/A). |
| 10–25 Kb/s | General data (temperature, humidity, sound level, among others) not related to diagnostic or critical information. | Controller Area Network-Bus (CAN-B), J1850. |
| 125 Kb/s–1 Mb/s | Transmission of information related to powertrain and chassis. | Controller Area Network-Bus (CAN-B). |
| Higher than 1 Mb/s | Multimedia and infotainment applications. | Media Oriented System Transport (MOST), Digital Data Bus, Bluetooth, FlexRay, ZigBee, WiFi and Ultra-wideband (UWB). |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guerrero-Ibáñez, J.; Zeadally, S.; Contreras-Castillo, J. Sensor Technologies for Intelligent Transportation Systems. Sensors 2018, 18, 1212. https://doi.org/10.3390/s18041212
Guerrero-Ibáñez J, Zeadally S, Contreras-Castillo J. Sensor Technologies for Intelligent Transportation Systems. Sensors. 2018; 18(4):1212. https://doi.org/10.3390/s18041212
Chicago/Turabian StyleGuerrero-Ibáñez, Juan, Sherali Zeadally, and Juan Contreras-Castillo. 2018. "Sensor Technologies for Intelligent Transportation Systems" Sensors 18, no. 4: 1212. https://doi.org/10.3390/s18041212
APA StyleGuerrero-Ibáñez, J., Zeadally, S., & Contreras-Castillo, J. (2018). Sensor Technologies for Intelligent Transportation Systems. Sensors, 18(4), 1212. https://doi.org/10.3390/s18041212