An Embedded Sensory System for Worker Safety: Prototype Development and Evaluation


Abstract
1. Introduction
- (1)
- Developed a customized tactile sensory system for formulating a tactile language system,
- (2)
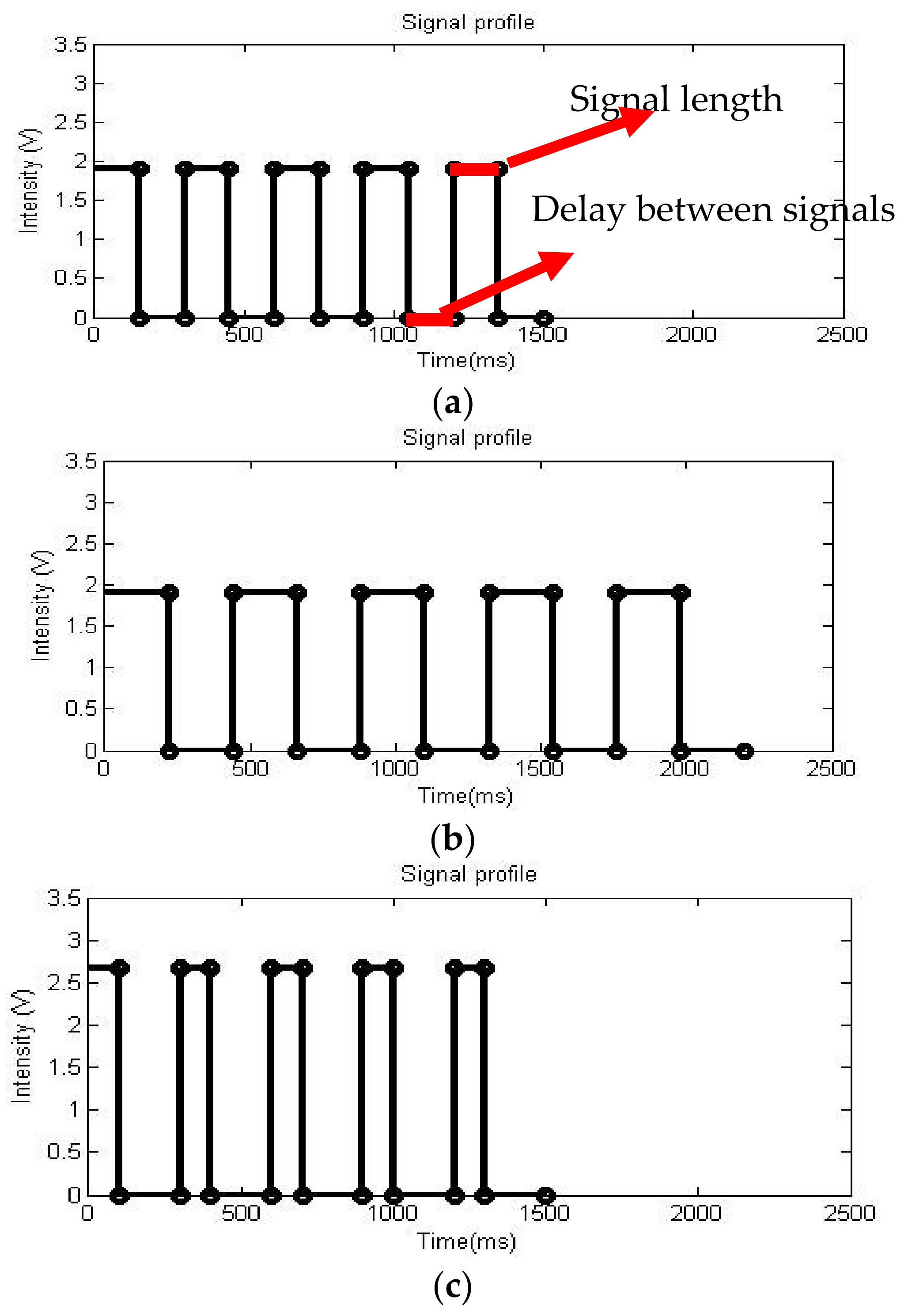
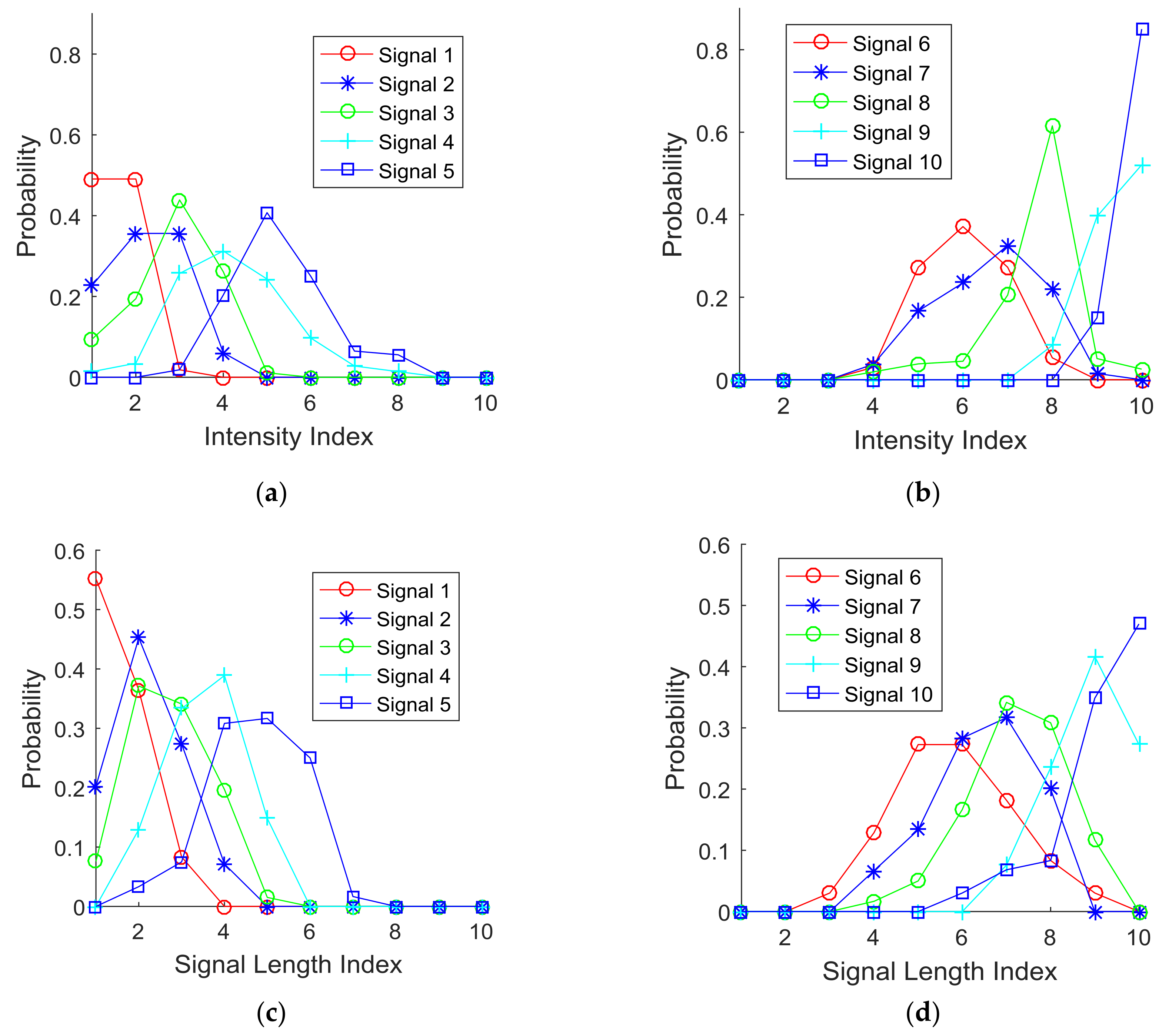
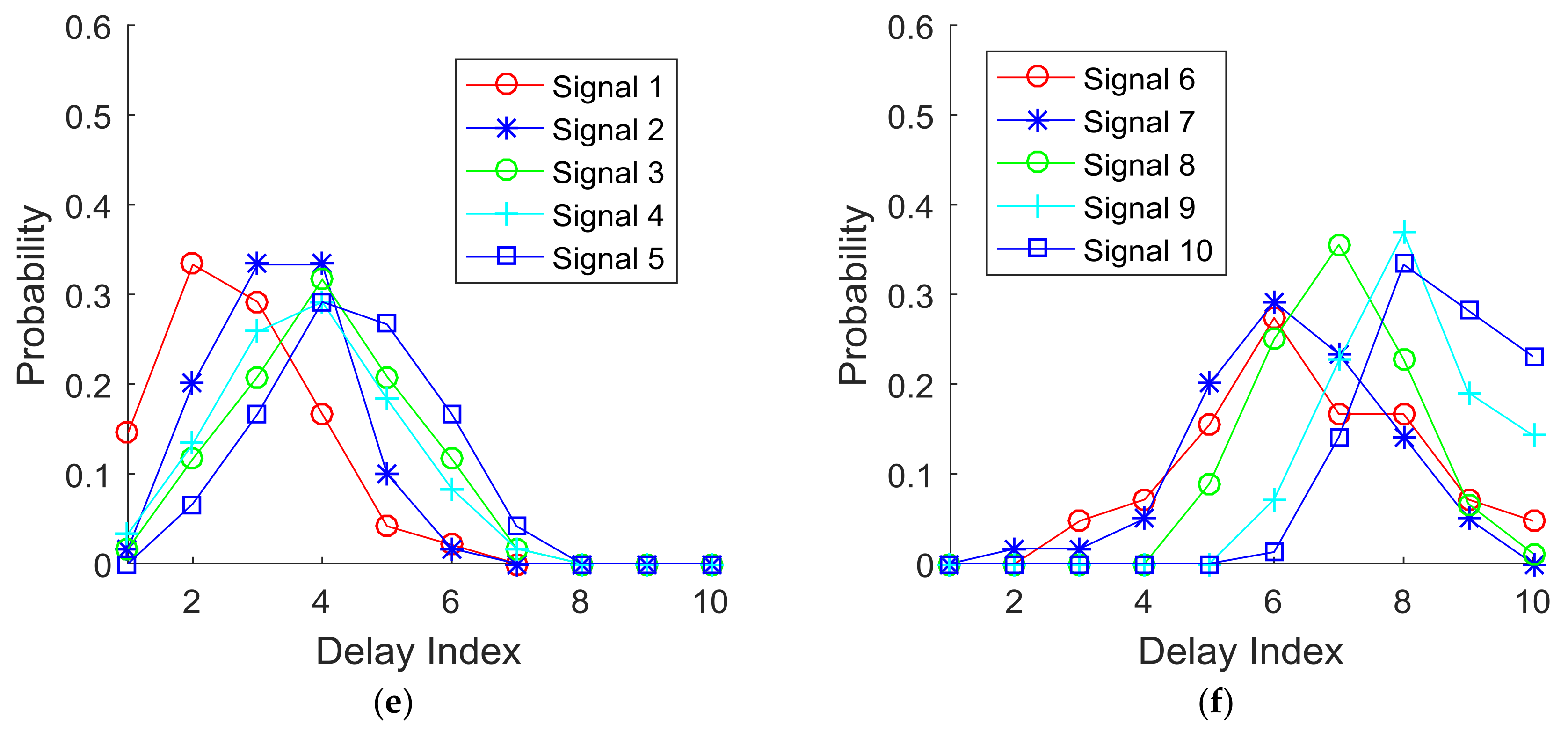
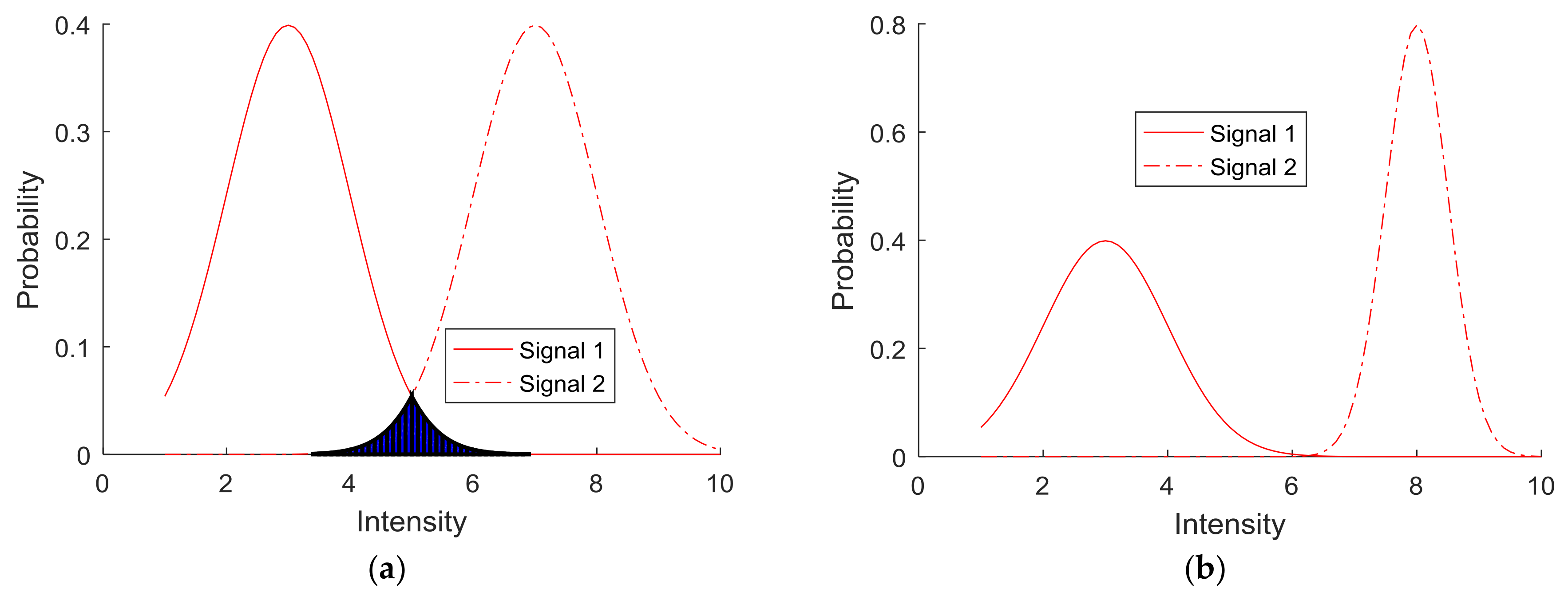
- Explored signal parameters to identify basic unit signals that could be perceived in a short amount of time (i.e., less than 0.5 s per unit signal) by using three parameters: signal intensity, signal length, and delay between consecutive pulses, and
- (3)
- Analyzed the test data from these two experiments.
2. Literature Review
2.1. Sensor-Based Research for Construction Safety
2.2. Background for Artificial Sensory Research
3. Objective and Scope
4. Method
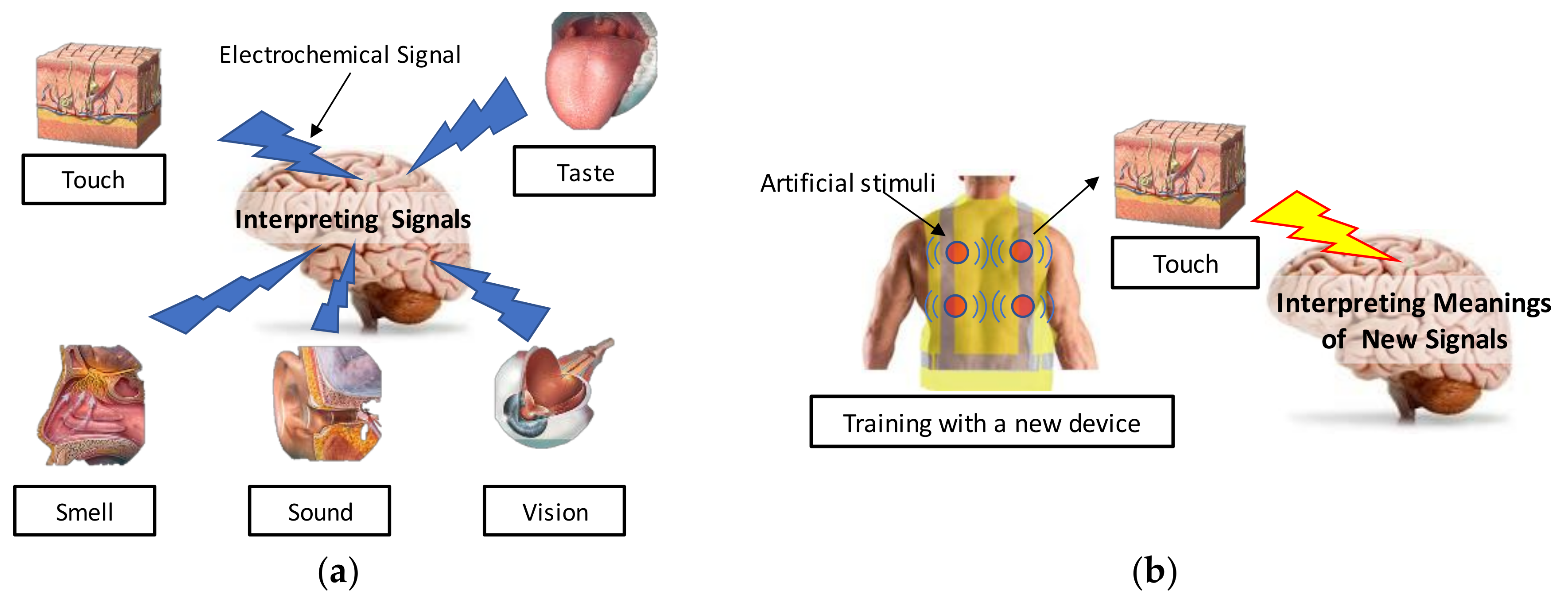
4.1. Body Stimulus and Human Recognition
- (1)
- We developed a prototype tactile-based communication system,
- (2)
- Developed artificial tactile stimuli by creating various vibratory signals and refining such parameters as intensity, signal length, and delay between consecutive pulses profiles,
- (3)
- Extensively tested the signals that were created and their parameters to identify easily distinguishable profiles and their characteristics, and
- (4)
- Used the identified tactile signals to further test the ability to directly inform the test subjects of an impending hazard.
4.2. Apparatus: System Components
4.3. Profiles
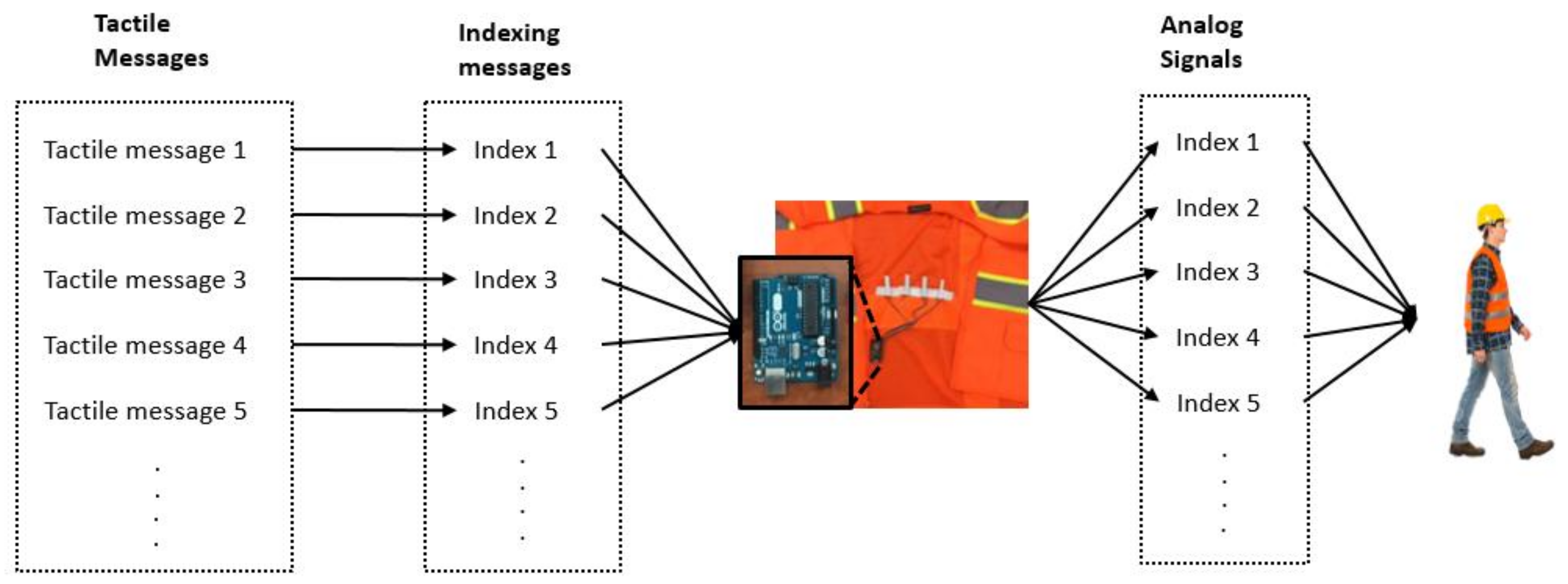
4.4. Signal Mapping
5. Experiment
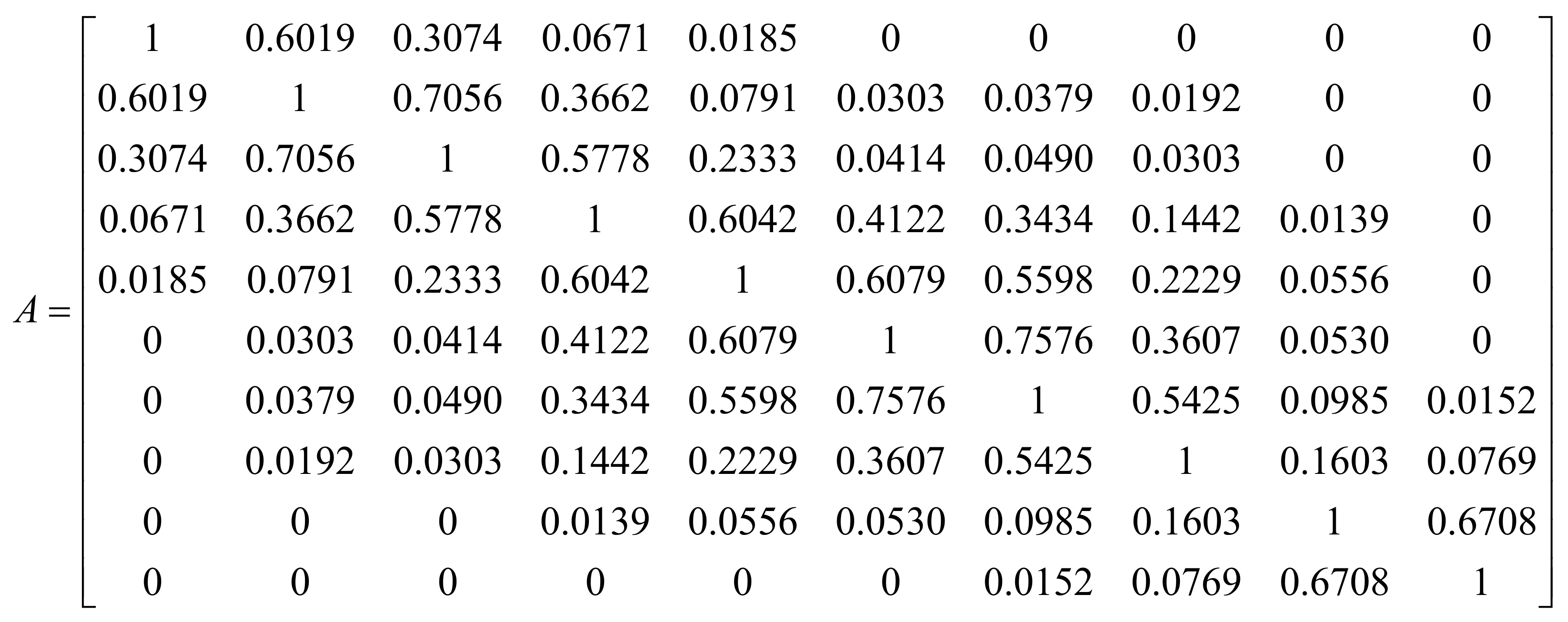
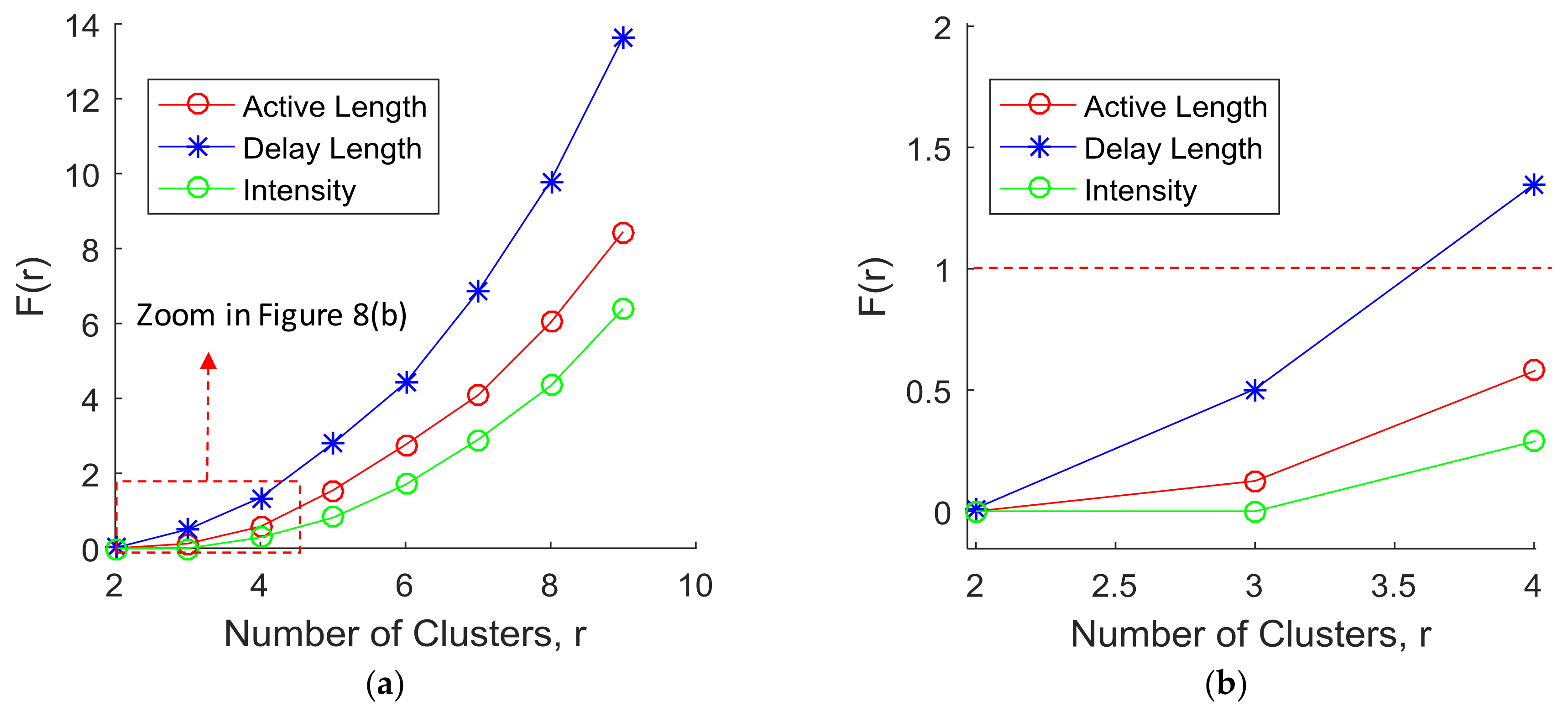
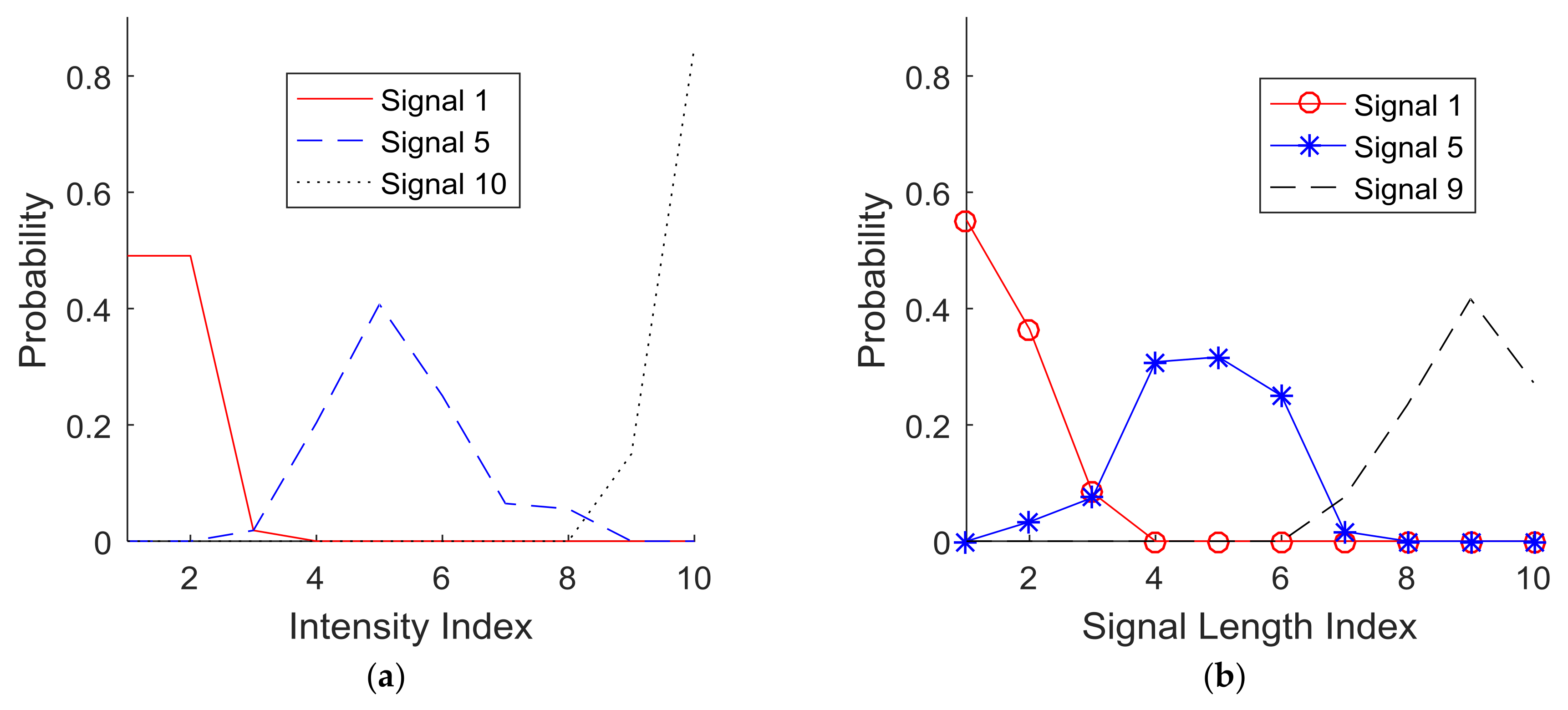
5.1. Experiment 1: Determining the Basic Signal Units
- S is the set containing all the signal indices. S = {1, 2, …, 10}
- Vr is the set created from combinations of r elements from S
- Vr,k is the kth element in Vr
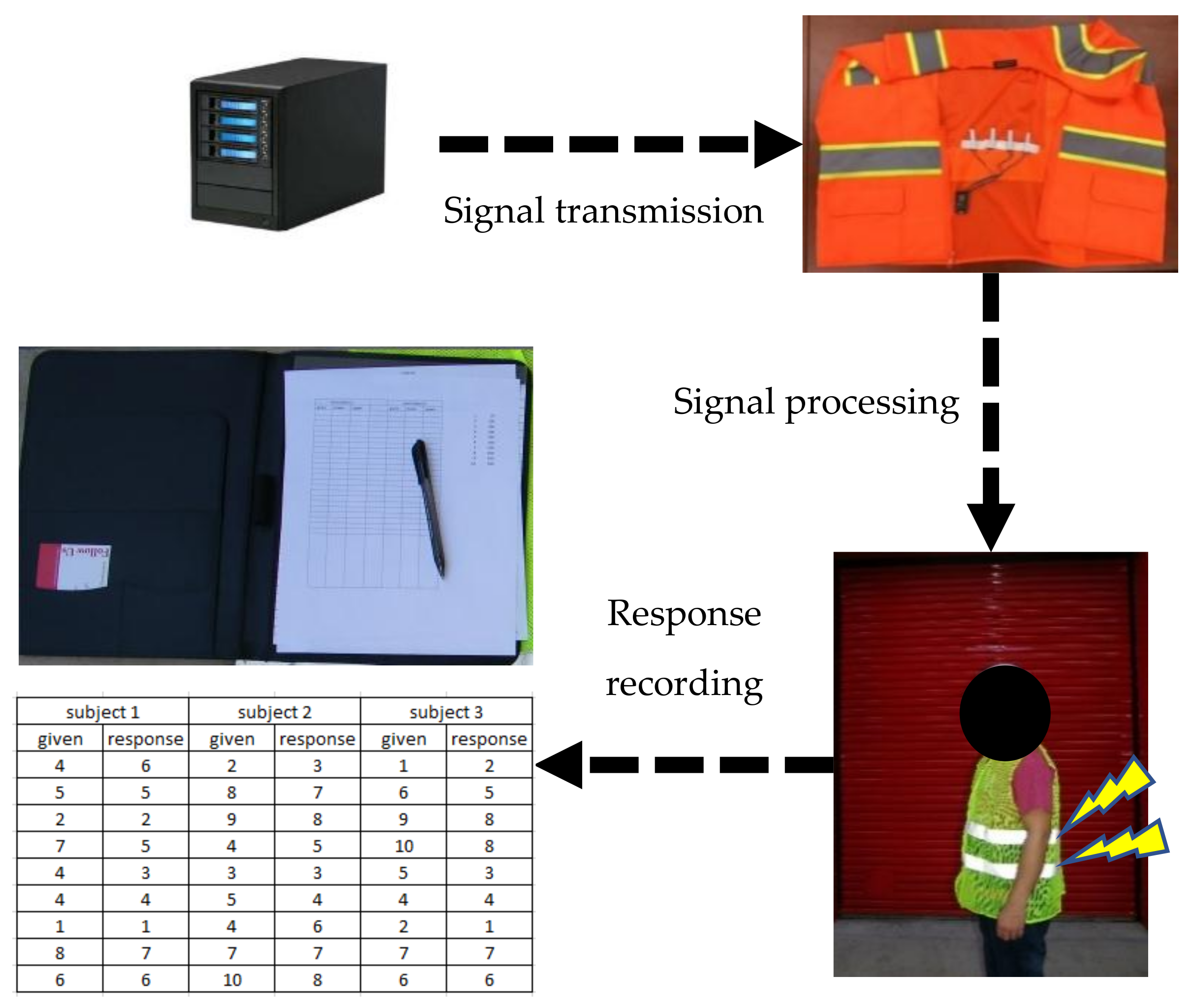
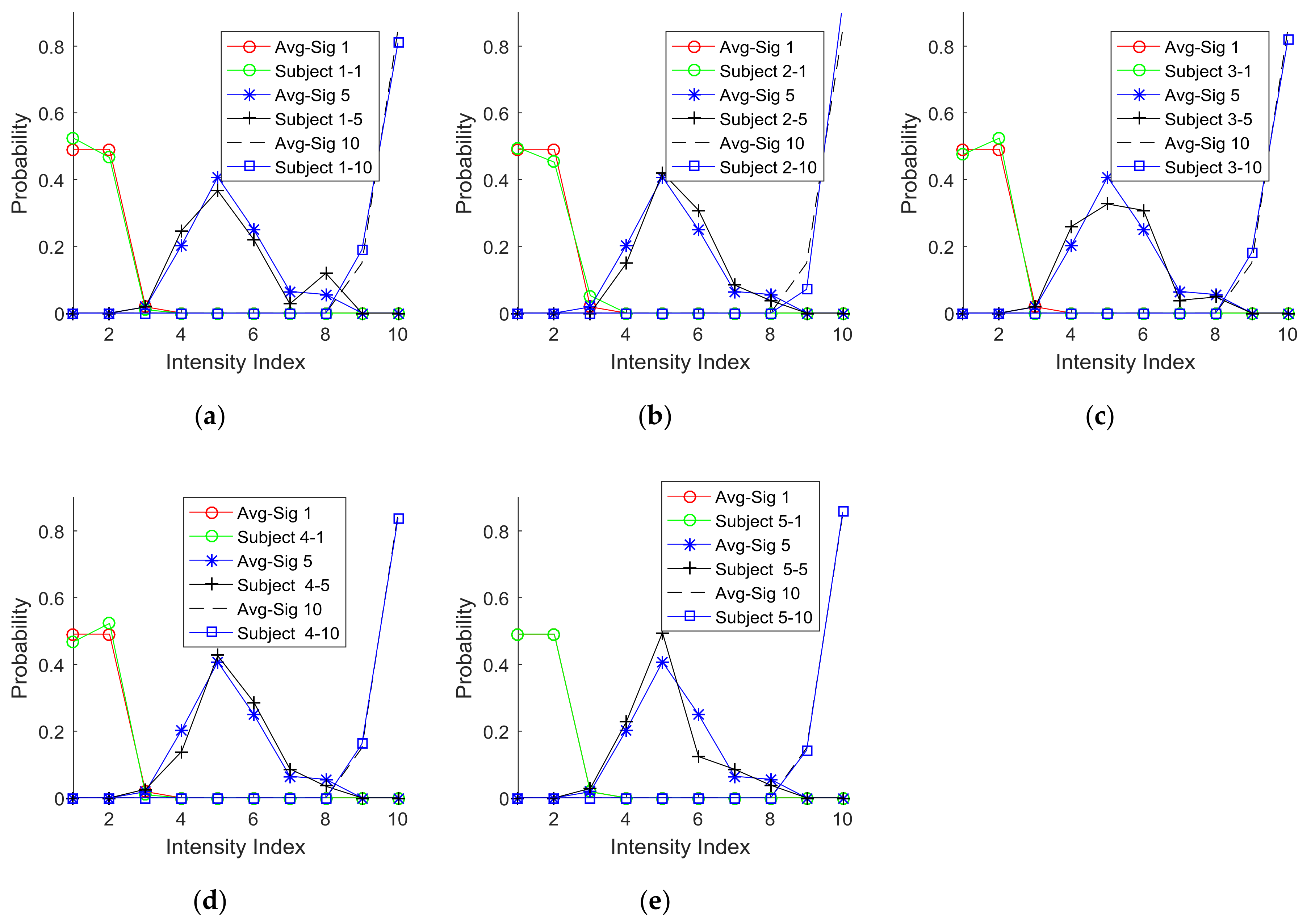
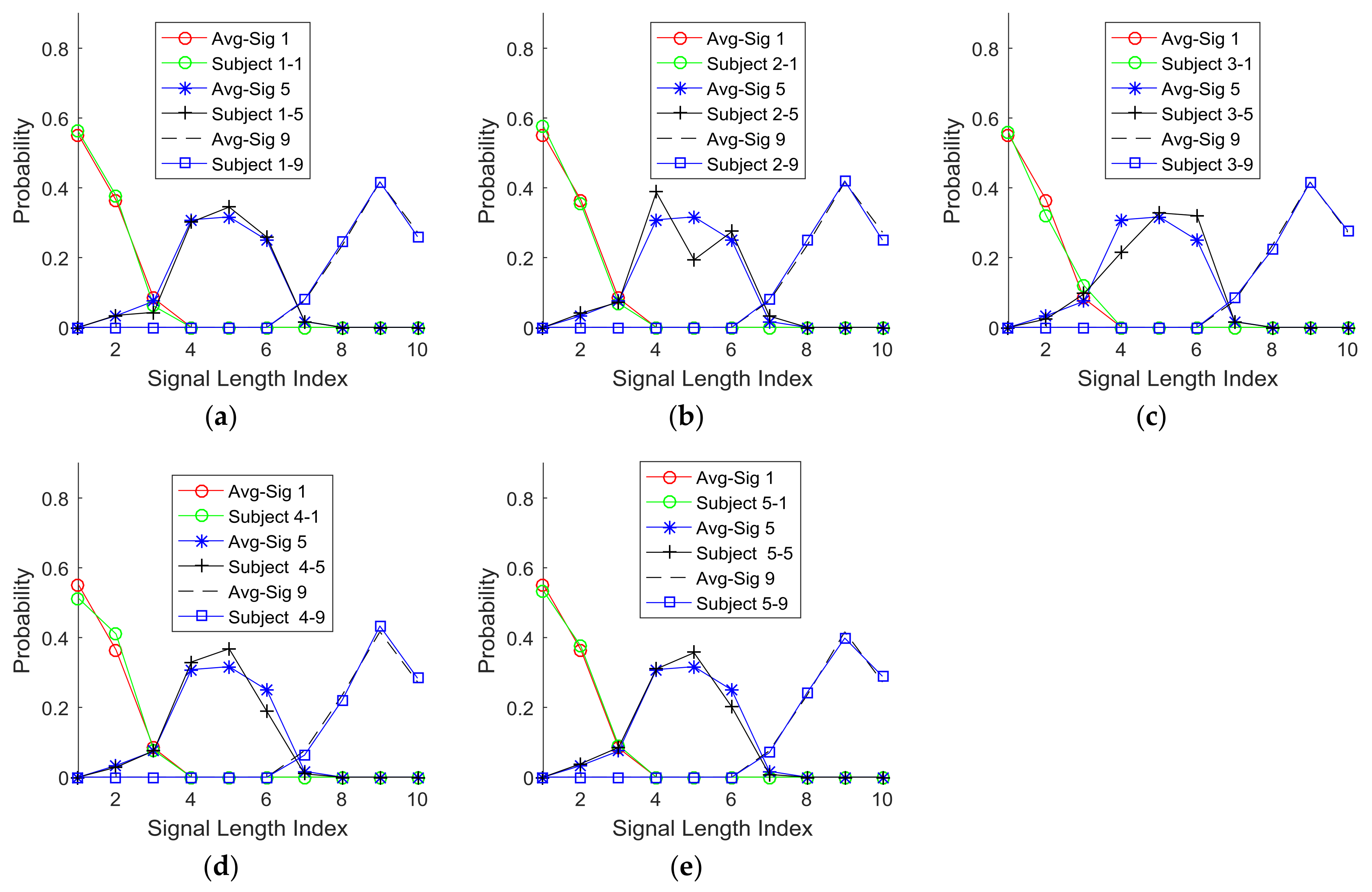
5.2. Experiment 2 for Validating Communicability of the Identified Basic Unit Signals
- (1)
- The signal was properly perceived but the subject did not react properly (8 times) and
- (2)
- The signals were sent with a delay (2 times).
6. Conclusions
Author Contributions
Conflicts of Interest
References
- Bureau of Labor Statistics Census of Fatal Occupational Injuries Summary. 2015. Available online: https://www.bls.gov/news.release/cfoi.nr0.htm (accessed on 1 September 2017).
- Park, M.-W.; Brilakis, I. Construction worker detection in video frames for initializing vision trackers. Autom. Constr. 2012, 28, 15–25. [Google Scholar] [CrossRef]
- Cordova, F.; Brilakis, I. On Site 3D Vision Tracking of Construction Personnel. In Proceedings of the 16th Annual Conference of the International Group for Lean Construction, Manchester, UK, 16–18 July 2008; pp. 809–820. [Google Scholar]
- Escorcia, V.; Dávila, M.; Golparvar-Fard, M.; Niebles, J. Automated Vision-Based Recognition of Construction Worker Actions for Building Interior Construction Operations Using RGBD Cameras. In Proceedings of the 2012 Construction Research Congress, West Lafayette, IN, USA, 21–23 May 2012; pp. 879–888. [Google Scholar]
- Wang, C.; Cho, Y.K.; Park, J. Performance Tests for Automatic 3D Geometric Data Registration Technique for Progressive As-Built Construction Site Modeling. In Proceedings of the 2014 International Conference on Computing in Civil and Building Engineering, Orlando, FL, USA, 23–25 June 2014; pp. 1053–1061. [Google Scholar]
- Cho, Y.K.; Wang, C.; Gai, M.; Park, J. Rapid Dynamic Target Surface Modeling for Crane Operation Using Hybrid LADAR System. In Proceedings of the 2014 Construction Research Congress: Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 1053–1062. [Google Scholar]
- Park, M.-W.; Makhmalbaf, A.; Brilakis, I. Comparative study of vision tracking methods for tracking of construction site resources. Autom. Constr. 2011, 20, 905–915. [Google Scholar] [CrossRef]
- Chi, S.; Caldas, C.H. Automated Object Identification Using Optical Video Cameras on Construction Sites. Comput. Civ. Infrastruct. Eng. 2011, 26, 368–380. [Google Scholar] [CrossRef]
- Gong, J.; Caldas, C.H. Computer Vision-Based Video Interpretation Model for Automated Productivity Analysis of Construction Operations. J. Comput. Civ. Eng. 2010, 24, 252–263. [Google Scholar] [CrossRef]
- Kim, K.; Kim, H.; Kim, H. Image-based construction hazard avoidance system using augmented reality in wearable device. Autom. Constr. 2017, 83, 390–403. [Google Scholar] [CrossRef]
- Woo, S.; Jeong, S.; Mok, E.; Xia, L.; Choi, C.; Pyeon, M.; Heo, J. Application of WiFi-based indoor positioning system for labor tracking at construction sites: A case study in Guangzhou MTR. Autom. Constr. 2011, 20, 3–13. [Google Scholar] [CrossRef]
- Park, J.; Cho, Y.K. Development and Evaluation of a Probabilistic Local Search Algorithm for Complex, Dynamic Indoor Construction Sites. J. Comput. Civ. Eng. 2017, 31, 4017015. [Google Scholar] [CrossRef]
- Montaser, A.; Moselhi, O. RFID indoor location identification for construction projects. Autom. Constr. 2014, 39, 167–179. [Google Scholar] [CrossRef]
- Park, J.; Kim, K.; Cho, Y.K. Framework of Automated Construction-Safety Monitoring Using Cloud-Enabled BIM and BLE Mobile Tracking Sensors. J. Constr. Eng. Manag. 2016, 143, 5016019. [Google Scholar] [CrossRef]
- Wu, W.; Yang, H.; Chew, D.A.S.; Yang, S.H.; Gibb, A.G.F.; Li, Q. Towards an autonomous real-time tracking system of near-miss accidents on construction sites. Autom. Constr. 2010, 19, 134–141. [Google Scholar] [CrossRef]
- Lee, H.; Lee, K.; Park, M. RFID-based Real-Time Locating System for Construction Safety Management. J. Comput. Civ. Eng. 2012, 26, 366–377. [Google Scholar] [CrossRef]
- Chen, J.; Qiu, J.; Ahn, C. Construction worker’s awkward posture recognition through supervised motion tensor decomposition. Autom. Constr. 2017, 77, 67–81. [Google Scholar] [CrossRef]
- Park, J.; Chen, J.; Cho, Y.K. Self-corrective knowledge-based hybrid tracking system using BIM and multimodal sensors. Adv. Eng. Inform. 2017, 32, 126–138. [Google Scholar] [CrossRef]
- Yang, K.; Aria, S.; Ahn, C.; Stentz, T. Automated Detection of Near-miss Fall Incidents in Iron Workers Using Inertial Measurement Units. In Proceedings of the 2014 Construction Research Congress: Construction in a Global Network, Atlanta, GA, USA, 19–21 May 2014; pp. 935–944. [Google Scholar]
- Kim, H.; Ahn, C.R.; Yang, K. Identifying Safety Hazards Using Collective Bodily Responses of Workers. J. Constr. Eng. Manag. 2016, 143, 4016090. [Google Scholar] [CrossRef]
- Yang, K.; Ahn, C.R.; Vuran, M.C.; Kim, H. Collective sensing of workers’ gait patterns to identify fall hazards in construction. Autom. Constr. 2017, 82, 166–178. [Google Scholar] [CrossRef]
- Fang, Y.; Cho, Y.K. Crane Load Positioning and Sway Monitoring Using an Inertial Measurement Unit. In Computing in Civil Engineering 2015; American Society of Civil Engineers: Reston, VA, USA, 2015; pp. 700–707. [Google Scholar]
- Cheng, C.-F.; Rashidi, A.; Davenport, M.; David, A. Audio Signal Processing for Activity Recognition for construction Heavy Equipment. In Proceedings of the 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, AL, USA, 18–21 July 2016; pp. 642–650. [Google Scholar]
- Novich, S. Sound-To-Touch Sensory Substitution and Beyond. Ph.D. Dissertaion, Rice University, Houston, TX, USA, 2015. [Google Scholar]
- Pitts-Taylor, V. The plastic brain: Neoliberalism and the neuronal self. Health (London) 2010, 14, 635–652. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Yang, X.; Wang, F.; Rose, T.; Chan, G.; Dong, S. Stochastic state sequence model to predict construction site safety states through Real-Time Location Systems. Saf. Sci. 2016, 84, 78–87. [Google Scholar] [CrossRef]
- Carbonari, A.; Giretti, A.; Naticchia, B. A proactive system for real-time safety management in construction sites. Autom. Constr. 2011, 20, 686–698. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.-S.; Park, M.; Chung, B.; Hwang, S. Automated hazardous area identification using laborers’ actual and optimal routes. Autom. Constr. 2016, 65, 21–32. [Google Scholar] [CrossRef]
- Lee, U.-K.; Kim, J.-H.; Cho, H.; Kang, K.-I. Development of a mobile safety monitoring system for construction sites. Autom. Constr. 2009, 18, 258–264. [Google Scholar] [CrossRef]
- Riaz, Z.; Arslan, M.; Kiani, A.K.; Azhar, S. CoSMoS: A BIM and wireless sensor based integrated solution for worker safety in confined spaces. Autom. Constr. 2014, 45, 96–106. [Google Scholar] [CrossRef]
- Teizer, J.; Allread, B.S.; Fullerton, C.E.; Hinze, J. Autonomous pro-active real-time construction worker and equipment operator proximity safety alert system. Autom. Constr. 2010, 19, 630–640. [Google Scholar] [CrossRef]
- Park, J.; Marks, E.; Cho, Y.K.; Suryanto, W. Performance Test of Wireless Technologies for Personnel and Equipment Proximity Sensing in Work Zones. J. Constr. Eng. Manag. 2015, 142, 4015049. [Google Scholar] [CrossRef]
- Park, J.; Cho, Y.K.; Timalsina, S.K. Direction Aware Bluetooth Low Energy Based Proximity Detection System for Construction Work Zone Safety. In Proceedings of the 33rd International Symposium on Automation and Robotics in Construction (ISARC 2016), Auburn, AL, USA, 18–21 July 2016; pp. 76–82. [Google Scholar]
- Shen, X.; Marks, E.D. Near-Miss Information Visualization Tool in BIM for Construction Safety. J. Constr. Eng. Manag. 2016, 142, 40515100. [Google Scholar] [CrossRef]
- Drum, T. Work Zone Intrusion Alarms for Highway Workers. Available online: http://www.dot.ca.gov/newtech/researchreports/preliminary_investigations/docs/work_zone_warning_preliminary_investigation.pdf (accessed on 4 October 2017).
- Wang, M.-H.; Schrock, S.; Bai, Y.; Rescor, R. Evaluation of Innovative Traffic Safety Devices at Short-Term Work Zones; Report no. K-TRAN: KU-09-5R; Kansas Department of Transportation: Topeka, KS, USA, 2011. [Google Scholar]
- Ward, J.; Meijer, P. Visual experiences in the blind induced by an auditory sensory substitution device. Conscious. Cogn. 2010, 19, 492–500. [Google Scholar] [CrossRef] [PubMed]
- Chebat, D.-R.; Schneider, F.C.; Kupers, R.; Ptito, M. Navigation with a sensory substitution device in congenitally blind individuals. Neuroreport 2011, 22, 342–347. [Google Scholar] [CrossRef] [PubMed]
- Bach-y Rita, P.; Collins, C.C.; Saunders, F.A.; White, B.; Scadden, L. Vision substitution by tactile image projection. Nature 1969, 221, 963–964. [Google Scholar] [CrossRef] [PubMed]
- Chekhchoukh, A.; Goumidi, M.; Vuillerme, N.; Payan, Y.; Glade, N. Electrotactile vision substitution for 3D trajectory following. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; pp. 6413–6416. [Google Scholar] [CrossRef]
- Brogaard, B.; Marlow, K.; Overgaard, M.; Schwartz, B.L.; Zopluoglu, C.; Tomson, S.; Neufed, J.; Sinke, C.; Owen, C.; Eagleman, D.; et al. Deaf hearing: Implicit discrimination of auditory content in a patient with mixed hearing loss Deaf hearing: Implicit discrimination of auditory content in a patient with mixed hearing loss. Philos. Psychol. 2017, 30, 15–37. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Signal Intensity (V) | Signal Length (ms) | Signal Delay (ms) |
|---|---|---|---|
| 1 | 1.3 | 75 | 75 |
| 2 | 1.5 | 100 | 100 |
| 3 | 1.7 | 150 | 150 |
| 4 | 1.9 | 200 | 200 |
| 5 | 2.1 | 250 | 250 |
| 6 | 2.3 | 300 | 300 |
| 7 | 2.5 | 350 | 350 |
| 8 | 2.7 | 400 | 400 |
| 9 | 2.9 | 450 | 450 |
| 10 | 3.1 | 500 | 500 |
| Test 1 | Test 2 | ||
|---|---|---|---|
| Signal Index | Mapped Meaning | Signal Index | Mapped-Meaning |
| Intensity 1 | “ball thrown left so move right” | Active Length 1 | “ball thrown left so move right” |
| Intensity 5 | “ball thrown right so move left” | Active Length 5 | “ball thrown right so move left” |
| Intensity 9 | “ball thrown above so sit down” | Active Length 10 | “ball thrown above so sit down” |
| Test 1 (Intensity) | ||||
|---|---|---|---|---|
| Required Action | Failure Count | |||
| Subject 1 | Subject 2 | Subject 3 | Total | |
| “Move Right” (index 1) | 1 (out of 18) | 0 (out of 17) | 1 (out of 17) | 2 (out 52) |
| “Move Left” (index 5) | 0 (out of 15) | 0 (out of 17) | 1 (out of 18) | 1 (out 50) |
| “Sit Down” (index 9) | 0 (out of 17) | 0 (out of 16) | 0 (out of 15) | 0 (out 48) |
| Correct rate | 98% | 100% | 96% | 98% |
| Test 2 (Active Signal Length) | ||||
|---|---|---|---|---|
| Required Action | Failure Count | |||
| Subject 1 | Subject 2 | Subject 3 | Total | |
| “Move Right” (index 1) | 1 (out of 17) | 1 (out of 16) | 0 (out of 16) | 2 (out 49) |
| “Move Left” (index 5) | 1 (out of 16) | 1 (out of 18) | 1 (out of 18) | 3 (out 52) |
| “Sit Down” (index 10) | 0 (out of 17) | 1 (out of 16) | 1 (out of 16) | 2 (out 49) |
| Correct rate | 96% | 94% | 96% | 95.3% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, C.; Park, J. An Embedded Sensory System for Worker Safety: Prototype Development and Evaluation. Sensors 2018, 18, 1200. https://doi.org/10.3390/s18041200
Cho C, Park J. An Embedded Sensory System for Worker Safety: Prototype Development and Evaluation. Sensors. 2018; 18(4):1200. https://doi.org/10.3390/s18041200
Chicago/Turabian StyleCho, Chunhee, and JeeWoong Park. 2018. "An Embedded Sensory System for Worker Safety: Prototype Development and Evaluation" Sensors 18, no. 4: 1200. https://doi.org/10.3390/s18041200
APA StyleCho, C., & Park, J. (2018). An Embedded Sensory System for Worker Safety: Prototype Development and Evaluation. Sensors, 18(4), 1200. https://doi.org/10.3390/s18041200